CN115755958A - Manned and unmanned aircraft cooperative formation form transformation method, system and device - Google Patents
Manned and unmanned aircraft cooperative formation form transformation method, system and deviceDownload PDFInfo
- Publication number
- CN115755958A CN115755958ACN202211387337.3ACN202211387337ACN115755958ACN 115755958 ACN115755958 ACN 115755958ACN 202211387337 ACN202211387337 ACN 202211387337ACN 115755958 ACN115755958 ACN 115755958A
- Authority
- CN
- China
- Prior art keywords
- formation
- manned
- uav
- action
- unmanned aerial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明属于航空飞行器控制技术领域,涉及一种有人、无人飞机协同编队队形变换方法、系统及装置。The invention belongs to the technical field of aviation vehicle control, and relates to a method, system and device for manned and unmanned aircraft cooperative formation transformation.
背景技术Background technique
多机协同编队是指多架飞行器同组成的编队,在执行任务的过程中,各架飞行器协同配合进行各种任务动作,在战术和机载装备上形成互补以提高效率和完成任务的成功率。从传统意义上来说,多机协同编队一般是指由多架有人机(MAV,Manned AerialVehicle)形成的编队,随着无人机(UAV,Unmanned Aerial Vehicle)技术的发展,协同编队这一概念得以扩展,多机协同不仅可以指多架有人机之间的协同,而且还包括有人机与无人机之间的协同,即有人、无人机协同编队。Multi-aircraft coordinated formation refers to a formation composed of multiple aircraft. In the process of performing missions, each aircraft cooperates with each other to perform various mission actions, and complement each other in terms of tactics and airborne equipment to improve efficiency and success rate of completing missions. . In the traditional sense, multi-aircraft cooperative formation generally refers to the formation formed by multiple manned aircraft (MAV, Manned Aerial Vehicle). With the development of unmanned aerial vehicle (UAV, Unmanned Aerial Vehicle) technology, the concept of cooperative formation Expanded, multi-machine coordination can not only refer to the coordination between multiple manned machines, but also includes the coordination between manned machines and unmanned aerial vehicles, that is, the coordinated formation of manned and unmanned aerial vehicles.
有人、无人飞机协同编队队形的变换方法也与传统多机协同编队的变换方法有所差异,既不能完全采用有人机编队的方式灵活操控,也不能完全采用无人机编队的方式让飞机全自动进行编队变换,故亟需一种能够满足有人机和无人机混合编队的方法。The transformation method of manned and unmanned aircraft cooperative formation is also different from the transformation method of traditional multi-aircraft cooperative formation. Formation transformation is performed fully automatically, so a method that can meet the mixed formation of manned aircraft and unmanned aerial vehicles is urgently needed.
发明内容Contents of the invention
本发明的目的在于解决现有技术中的问题,提供一种有人、无人飞机协同编队队形变换方法、系统及装置,能够满足有人机和无人机之间的飞行编队变换问题,提高了有人机和无人机混合编队的安全性。The purpose of the present invention is to solve the problems in the prior art, to provide a method, system and device for manned and unmanned aircraft cooperative formation transformation, which can meet the problem of flight formation transformation between manned and unmanned aircraft, and improve the Safety of mixed formations of manned and unmanned aircraft.
为了实现上述目的,本发明采用以下技术方案予以实现:In order to achieve the above object, the present invention adopts the following technical solutions to achieve:
第一方面,本发明提供一种有人、无人飞机协同编队队形变换方法,包括以下步骤:In a first aspect, the present invention provides a method for manned and unmanned aircraft coordinated formation transformation, comprising the following steps:
根据任务需求生成编队指令,同时收集无人机和有人机的飞行状态数据;Generate formation instructions according to mission requirements, and collect flight status data of UAVs and manned aircraft at the same time;
根据编队指令计算出各无人机的期望位置;Calculate the expected position of each UAV according to the formation command;
根据飞行状态数据和期望位置计算出各无人机的飞行轨迹,根据预设的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令;Calculate the flight trajectory of each UAV according to the flight status data and expected position, calculate the corresponding action plan according to the preset single action instruction set, and obtain the action instructions of each UAV;
根据动作指令,控制各无人机完成相应的机动动作,到达期望位置,完成队形变换。According to the action instructions, control each UAV to complete the corresponding maneuvering action, reach the desired position, and complete the formation change.
第二方面,本发明提供一种有人、无人飞机协同编队队形变换系统,包括:In a second aspect, the present invention provides a coordinated formation transformation system for manned and unmanned aircraft, including:
编队指令生成模块,所述编队指令生成模块用于根据任务需求生成编队指令,同时收集无人机和有人机的飞行状态数据;Formation instruction generation module, described formation instruction generation module is used for generating formation instruction according to mission requirement, collects the flight state data of unmanned aerial vehicle and manned aircraft simultaneously;
位置计算模块,所述位置计算模块用于根据编队指令计算出各无人机的期望位置;A position calculation module, the position calculation module is used to calculate the expected position of each unmanned aerial vehicle according to the formation instruction;
动作指令生成模块,所述动作指令生成模块用于根据飞行状态数据和期望位置计算出各无人机的飞行轨迹,根据预设的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令;An action command generation module, the action command generation module is used to calculate the flight trajectory of each drone according to the flight state data and the expected position, calculate the corresponding action plan according to the preset single action command set, and obtain the action command;
动作执行模块,所述动作执行模块用于根据动作指令,控制各无人机完成相应的机动动作,到达期望位置,完成队形变换。An action execution module, the action execution module is used to control each UAV to complete the corresponding maneuvering action according to the action instruction, reach the desired position, and complete the formation change.
第三方面,本发明提供一种计算装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述方法的步骤。In a third aspect, the present invention provides a computing device, including a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the computer program, the above-mentioned method steps.
第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述方法的步骤。In a fourth aspect, the present invention provides a computer-readable storage medium, where the computer-readable storage medium stores a computer program, and when the computer program is executed by a processor, the steps of the above method are implemented.
与现有技术相比,本发明具有以下有益效果:Compared with the prior art, the present invention has the following beneficial effects:
本发明通过接收的无人机状态数据和实际飞行环境生成编队指令;判断生成的编队指令与原有的编队指令是否相同;若是,保持现有飞行编队不变;若否,获取无人机期望位置;基于无人机期望位置和飞行状态数据,获取各无人机机动动作;基于各无人机机动动作,发送无人机动作指令,驱动无人机完成编队队形变换。本发明通过有人机接收无人机所发送的状态数据,并结合实际飞行环境,调整无人机的飞行状态,能够提高有人机和无人机混合编队的安全性,提高预先任务分配和执行过程中动态任务的分配能力,提高任务执行过程中随机出现的新任务的处理能力。The present invention generates the formation command through the received UAV state data and the actual flight environment; judges whether the generated formation command is the same as the original formation command; if so, keeps the existing flight formation unchanged; if not, obtains the UAV expectation Position; Based on the expected position and flight status data of the drone, the maneuvering action of each drone is obtained; based on the maneuvering action of each drone, the action command of the drone is sent to drive the drone to complete the formation transformation. The invention adjusts the flight state of the UAV by receiving the state data sent by the UAV and combining the actual flight environment, which can improve the safety of the mixed formation of the UAV and the manned UAV, and improve the pre-task assignment and execution process The ability to allocate dynamic tasks in the middle, and improve the processing capacity of new tasks that randomly appear during task execution.
附图说明Description of drawings
为了更清楚的说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。In order to illustrate the technical solutions of the embodiments of the present invention more clearly, the accompanying drawings used in the embodiments will be briefly introduced below. It should be understood that the following drawings only show some embodiments of the present invention, and thus It should be regarded as a limitation on the scope, and those skilled in the art can also obtain other related drawings based on these drawings without creative work.
图1为本发明方法的流程图。Fig. 1 is the flowchart of the method of the present invention.
图2为本发明系统的框架图。Fig. 2 is a block diagram of the system of the present invention.
图3为本发明实施例一种有人、无人飞机协同编队队形变换方法的流程图。Fig. 3 is a flow chart of a method for transforming formations of manned and unmanned aircraft cooperative formations according to an embodiment of the present invention.
图4为本发明方法一实施例的流程图。Fig. 4 is a flowchart of an embodiment of the method of the present invention.
图5为本发明系统一实施例的框架图。Fig. 5 is a frame diagram of an embodiment of the system of the present invention.
图6为本发明的无人机基本机动动作的立体图。Fig. 6 is a perspective view of the basic maneuvering action of the drone of the present invention.
图7为本发明的无人机基本机动动作的侧视图。Fig. 7 is a side view of the basic maneuvering action of the drone of the present invention.
图8为本发明的无人机基本机动动作的俯视图。Fig. 8 is a top view of the basic maneuvering action of the drone of the present invention.
图9为本发明预存的直线编队图。Fig. 9 is a pre-stored linear formation diagram of the present invention.
图10为本发明预存的楔形编队图。Fig. 10 is a wedge formation diagram pre-stored in the present invention.
图11为本发明预存的四角护卫编队图。Fig. 11 is the pre-stored four-corner guard formation figure of the present invention.
图12为本发明预存的梯形编队图。Fig. 12 is a pre-stored echelon formation diagram of the present invention.
图13为本发明设计的四角护卫编队变换到梯形编队的一种航路规划方案。Fig. 13 is a kind of route planning scheme that the four-corner guard formation of the present invention is transformed into the echelon formation.
图14为本发明的直线编队变换为楔形编队的航路规划方案。Fig. 14 is a route planning scheme for transforming straight line formation into wedge formation according to the present invention.
其中,1-有人机MAV模块,2-队形库模块,3-动作库模块,4-无人机UAV模块,5-匀速直线飞行,6-匀加速直线飞行,7-无人机拉起,8-无人机俯冲,9-匀减速直线运动,10-协调左转弯,11-协调右转弯,12-无人机机体。Among them, 1-man-machine MAV module, 2-formation library module, 3-action library module, 4-unmanned aerial vehicle UAV module, 5-uniform straight-line flight, 6-uniform acceleration straight-line flight, 7-UAV pull up , 8-drone dive, 9-uniform deceleration linear motion, 10-coordinated left turn, 11-coordinated right turn, 12-drone body.
具体实施方式Detailed ways
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. The components of the embodiments of the invention generally described and illustrated in the figures herein may be arranged and designed in a variety of different configurations.
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。Accordingly, the following detailed description of the embodiments of the invention provided in the accompanying drawings is not intended to limit the scope of the claimed invention, but merely represents selected embodiments of the invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。It should be noted that like numerals and letters denote similar items in the following figures, therefore, once an item is defined in one figure, it does not require further definition and explanation in subsequent figures.
在本发明实施例的描述中,需要说明的是,若出现术语“上”、“下”、“水平”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。In the description of the embodiments of the present invention, it should be noted that the orientation or positional relationship indicated by the terms "upper", "lower", "horizontal", "inside" etc. is based on the orientation or positional relationship shown in the drawings , or the orientation or positional relationship that the product of the invention is usually placed in use is only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying that the device or element referred to must have a specific orientation or be constructed in a specific orientation and operation, and therefore should not be construed as limiting the invention. In addition, the terms "first", "second", etc. are only used for distinguishing descriptions, and should not be construed as indicating or implying relative importance.
此外,若出现术语“水平”,并不表示要求部件绝对水平,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。In addition, when the term "horizontal" appears, it does not mean that the part is required to be absolutely horizontal, but may be slightly inclined. For example, "horizontal" only means that its direction is more horizontal than "vertical", and it does not mean that the structure must be completely horizontal, but can be slightly inclined.
在本发明实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。In the description of the embodiments of the present invention, it should also be noted that, unless otherwise specified and limited, the terms "setting", "installation", "connection" and "connection" should be interpreted in a broad sense, for example, It can be a fixed connection, a detachable connection, or an integral connection; it can be a mechanical connection or an electrical connection; it can be a direct connection or an indirect connection through an intermediary, and it can be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention according to specific situations.
下面结合附图对本发明做进一步详细描述:The present invention is described in further detail below in conjunction with accompanying drawing:
参见图1,本发明实施例公开了一种有人、无人飞机协同编队队形变换方法,包括以下步骤:Referring to Fig. 1, the embodiment of the present invention discloses a method for manned and unmanned aircraft cooperative formation transformation, comprising the following steps:
S1根据任务需求生成编队指令,同时收集无人机和有人机的飞行状态数据;S1 generates formation instructions according to mission requirements, and collects flight status data of UAVs and manned aircraft at the same time;
编队指令包括编队间隔指令和编队队形指令;编队间隔指令用于控制有人、无人机编队飞行时各机之间的距离;编队队形指令用于控制有人、无人机编队的队形结构,编队队形指令为编队名称代码,对应一种有人、无人机的编队队形。Formation instructions include formation interval instructions and formation formation instructions; formation interval instructions are used to control the distance between aircraft when manned and unmanned aerial vehicles fly in formation; formation formation instructions are used to control the formation structure of manned and unmanned aerial vehicle formations , the formation command is the formation name code, which corresponds to a formation formation of manned and unmanned aerial vehicles.
飞行状态数据包括有人机飞行状态数据和无人机飞行状态数据;有人机飞行状态数据为有人机的飞行速度、飞行高度、有人机位置和姿态信息;无人机飞行状态数据为无人机的飞行速度、飞行高度、无人机位置和姿态信息。The flight state data includes the flight state data of the manned machine and the flight state data of the UAV; the flight state data of the manned machine is the flight speed, flight altitude, position and attitude information of the manned machine; Flight speed, flight altitude, UAV position and attitude information.
S2根据编队指令计算出各无人机的期望位置;S2 calculates the expected position of each UAV according to the formation instruction;
S3根据飞行状态数据和期望位置计算出各无人机的飞行轨迹,根据预设的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令;S3 calculates the flight trajectory of each UAV according to the flight state data and expected position, calculates the corresponding action plan according to the preset single action instruction set, and obtains the action instructions of each UAV;
S4根据动作指令,控制各无人机完成相应的机动动作,到达期望位置,完成队形变换;具体的各无人机根据动作指令前往新编队队形中该无人机的期望位置,并保持跟随;同时识别其他无人机以避开防止碰撞。S4 According to the action instruction, control each UAV to complete the corresponding maneuvering action, reach the desired position, and complete the formation transformation; each specific UAV goes to the desired position of the UAV in the new formation according to the action instruction, and keeps Follow; while identifying other drones to avoid collisions.
机动动作包括7种基本机动动作和4种基础编队队形;基本机动动作包括匀速直线飞行、匀加速直线飞行、无人机拉起、无人机俯冲、匀减速直线运动、协调左转弯和协调右转弯;基础编队队形包括直线编队、楔形编队、四角护卫编队和梯形编队。The maneuvers include 7 basic maneuvers and 4 basic formation formations; the basic maneuvers include straight-line flight at a constant speed, straight-line flight at a uniform acceleration, UAV pull-up, UAV dive, uniform deceleration straight-line motion, coordinated left turn and coordinated Turn right; basic formations include straight formation, wedge formation, four-corner guard formation and echelon formation.
如图2所示,本发明实施例公开了一种有人、无人飞机协同编队队形变换系统,包括:As shown in Figure 2, the embodiment of the present invention discloses a coordinated formation transformation system for manned and unmanned aircraft, including:
编队指令生成模块,编队指令生成模块用于根据任务需求生成编队指令,同时收集无人机和有人机的飞行状态数据;Formation instruction generation module, the formation instruction generation module is used to generate formation instructions according to mission requirements, and collect flight status data of unmanned aerial vehicles and manned aircraft;
位置计算模块,位置计算模块用于根据编队指令计算出各无人机的期望位置;位置计算模块包括队形库模块,队形库模块储存有编队指令所对应的无人机队形、无人机在指定队形飞行时各无人机的飞行数据以及无人机相对于有人机的期望位置信息。Position calculation module, the position calculation module is used to calculate the expected position of each drone according to the formation command; the position calculation module includes a formation library module, and the formation library module stores the formation of the drone corresponding to the formation command. The flight data of each UAV and the expected position information of the UAV relative to the manned UAV when the UAV is flying in the specified formation.
动作指令生成模块,动作指令生成模块用于根据飞行状态数据和期望位置计算出各无人机的飞行轨迹,根据预设的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令;The action instruction generation module, the action instruction generation module is used to calculate the flight trajectory of each UAV according to the flight status data and the expected position, calculate the corresponding action plan according to the preset single action instruction set, and obtain the action of each UAV instruction;
动作执行模块,动作执行模块用于根据动作指令,控制各无人机完成相应的机动动作,到达期望位置,完成队形变换。动作执行模块包括无人机UAV模块和有人机MAV模块,无人机UAV模块用于接收动作指令,并将各无人机飞行状态持续发送到有人机MAV模块,形成数据反馈。An action execution module, the action execution module is used to control each UAV to complete the corresponding maneuvering action according to the action instruction, reach the desired position, and complete the formation change. The action execution module includes the UAV module of the UAV and the MAV module of the manned machine. The UAV module of the UAV is used to receive action commands, and continuously send the flight status of each UAV to the MAV module of the manned machine to form data feedback.
如图3所示,在一个可行的实施例中,本发明公开了一种有人、无人飞机协同编队队形变换方法,包括以下步骤:As shown in Fig. 3, in a feasible embodiment, the present invention discloses a kind of manned and unmanned aircraft cooperative formation transformation method, comprising the following steps:
步骤1,有人机根据任务需求向队形库模块发出对应的编队指令,同时向动作库发出无人机和有人机的飞行状态数据。Step 1: The manned machine sends corresponding formation instructions to the formation library module according to the task requirements, and at the same time sends the flight status data of the UAV and the manned machine to the action library.
步骤2,队形库根据编队指令计算出各无人机的期望位置,将期望位置发送到动作库。
步骤3,动作库根据飞行状态数据和期望位置计算出无人机的飞行轨迹,根据预设在动作库中的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令,再将动作指令分别发送给对应无人机。Step 3: The action library calculates the flight trajectory of the UAV based on the flight state data and the expected position, calculates the corresponding action plan according to the single action instruction set preset in the action library, and obtains the action instructions of each UAV, and then Send the action commands to the corresponding drones respectively.
步骤4,无人机根据接收到的动作指令,完成相应的机动动作,到达期望位置,完成队形变换。Step 4: The UAV completes the corresponding maneuvering actions according to the received action instructions, arrives at the desired position, and completes the formation change.
具体方法如图4所示,图4为本发明实施例所公开的一种有人、无人飞机协同编队队形变换方法,包括以下步骤:The specific method is as shown in Fig. 4, and Fig. 4 is a kind of manned and unmanned aircraft cooperative formation transformation method disclosed by the embodiment of the present invention, comprising the following steps:
S101,接收各无人机所发送的状态数据。S101. Receive status data sent by each drone.
各无人机状态数据包括:各无人机相对于有人机的位置、姿态、航路规划和故障信息,其中位置信息以二维平面图形式进行可视化展示。The status data of each UAV includes: the position, attitude, route planning and fault information of each UAV relative to the manned aircraft, and the position information is visualized in the form of a two-dimensional plan.
S102,基于所述接收的无人机状态数据和实际飞行环境生成编队指令;S102, generating formation instructions based on the received UAV status data and the actual flight environment;
编队指令包括:编队间隔指令和编队队形指令;编队间隔指令用于控制有人、无人机编队飞行时各机之间的距离,编队间隔指令不对队形产生影响,用于控制队形的松散程度;编队队形指令用于控制有人、无人机编队的队形结构,编队队形指令为编队名称代码,对应一种有人、无人机的编队队形。Formation instructions include: formation interval instructions and formation formation instructions; formation interval instructions are used to control the distance between the aircraft when manned and unmanned aerial vehicles fly in formation, formation interval instructions do not affect the formation, and are used to control the looseness of the formation Degree; the formation command is used to control the formation structure of manned and unmanned aerial vehicles, and the formation formation command is the formation name code, which corresponds to a formation of manned and unmanned aerial vehicles.
S103,判断生成的编队指令与原有的编队指令是否相同;若是,保持现有飞行编队不变;若否,获取无人机期望位置;S103, judging whether the generated formation command is the same as the original formation command; if so, keep the existing flight formation unchanged; if not, obtain the desired position of the drone;
S104,基于无人机期望位置和飞行状态数据,获取各无人机机动动作;S104, based on the expected position and flight status data of the drone, obtain the maneuvering action of each drone;
飞行状态数据包括:有人机飞行状态数据和无人机的飞行状态数据;有人机飞行状态数据具体为有人机的飞行速度、飞行高度、有人机位置和姿态信息;无人机的飞行状态数据包括无人机飞行速度、飞行高度、无人机位置和姿态信息。The flight state data includes: the flight state data of the manned aircraft and the flight state data of the UAV; UAV flight speed, flight altitude, UAV position and attitude information.
S105,基于各无人机机动动作,发送无人机动作指令,驱动无人机完成编队队形变换。S105, based on the maneuvering action of each drone, send the drone action command, and drive the drone to complete formation transformation.
驱动无人机完成编队队形变换,具体为:各无人机基于无人机动作指令各不相同,无人机接收指令并做出机动前往新编队队形中该无人机的期望位置,并保持跟随;并识别其他无人机以避开防止机间碰撞。Drive the UAV to complete the formation transformation, specifically: each UAV is based on the UAV action command is different, the UAV receives the instruction and makes a maneuver to the desired position of the UAV in the new formation formation, And keep following; and identify other drones to avoid collisions between machines.
无人机机动动作包含7种基本机动动作和4种基础编队队形,基本机动动作具体为:匀速直线飞行、匀加速直线飞行、无人机拉起、无人机俯冲、匀减速直线运动、协调左转弯和协调右转弯;基础编队队形为:直线编队、楔形编队、四角护卫编队和梯形编队。UAV maneuvers include 7 basic maneuvers and 4 basic formations. The basic maneuvers are: uniform speed straight-line flight, uniform acceleration straight-line flight, UAV pull-up, UAV dive, uniform deceleration linear motion, Coordinated left turns and coordinated right turns; the basic formations are: straight formation, wedge formation, four-corner guard formation and echelon formation.
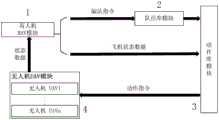
如图5所示,本发明实施例公开了一种有人、无人及协同编队的队形变换控制系统,包括有人机MAV模块1、队形库模块2、动作库模块3和无人机UAV模块4。As shown in Figure 5, the embodiment of the present invention discloses a formation transformation control system for manned, unmanned and coordinated formations, including a manned-
有人机MAV模块1实时接收各无人机所发送的状态数据,并根据任务需求向队形库模块2发出对应的编队指令,同时向动作库模块3发出无人机和有人机的飞行状态数据。The manned-
队形库模块2根据编队指令计算出各无人机的期望位置,并将期望位置发送到动作库模块3。The
动作库模块3根据飞行状态数据和期望位置计算出无人机的飞行轨迹,根据预设在动作库中的单一动作指令集计算出对应的动作规划,得到各无人机的动作指令,再将动作指令分别发送给无人机UAV模块4。The
无人机UAV模块4根据接收到的动作指令,控制对应无人机完成相应的机动动作,到达期望位置,完成队形变换。The
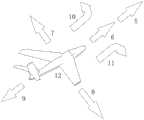
本发明所涉及的无人机布局均采用常规气动布局固定翼无人机,根据固定翼无人机机动特性和队形变换需求,参见图6、图7和图8,将无人机的7种飞行机动动作封装为无人机机动动作库,设计了4种基本有人、无人机协同编队队形封装为编队队形库,参见图9、图10、图11和图12。The UAV layout involved in the present invention all adopts conventional aerodynamic layout fixed-wing unmanned aerial vehicles, according to the maneuvering characteristics and formation transformation requirements of fixed-wing unmanned aerial vehicles, referring to Fig. 6, Fig. 7 and Fig. 8, the 7 A flight maneuver is packaged as a UAV maneuver library, and four basic manned and UAV cooperative formations are designed and packaged as a formation library, see Figures 9, 10, 11 and 12.
有人机MAV模块1是编队的指挥和控制核心,其主要包括飞行员、指挥控制界面、有人机自驾仪,通信模块等。有人机MAV模块1接收各无人机状态数据,展示到指挥控制界面,主要展示信息包括无人机各机位置与相对MAV位置、姿态、航路规划以及故障等信息,其中位置信息以二维平面图形式可视化展示到指挥控制界面,经过飞行员根据实际环境和各机状态的综合判断,通过指挥控制界面发布编队指令,同时在编队变换时有人机MAV模块1需要将飞机状态数据,包括位置、姿态等信息发送到队形库模块2,根据无人机与有人机之间状态差,对编队进行调整。The manned-
编队指令由有人机MAV模块1发送到队形库模块2;编队指令主要包括编队间隔指令和编队队形指令。编队间隔指令用于控制有人、无人机编队飞行时各机之间的距离,编队间隔指令不对队形产生影响,主要控制队形的松散程度;编队队形指令用于控制有人、无人机编队的队形结构,其中编队队形指令主要是编队名称代码,代表一种有人、无人机编队队形,与队形库模块2中的编队队形相对应。编队指令发送到队形库模块2以后,与库中原编队指令进行比较,如果相同则保持编队不变,如果指令不同,则代表着需要进行队形变换。The formation command is sent from the manned-
飞机状态数据包括有人机与无人机的飞行状态数据,主要包括有人机飞行速度、飞行高度、有人机位置、姿态信息、无人机飞行速度、高度、无人机位置、姿态信息等,由有人机MAV模块1发送到动作库模块3,用于计算编队变换时各无人机的机动动作。Aircraft status data includes flight status data of manned and unmanned aerial vehicles, mainly including manned and unmanned aircraft flight speed, flight altitude, manned aircraft position, attitude information, UAV flight speed, altitude, UAV position, attitude information, etc. The manned-
队形库模块2是有人、无人机协同飞行的编队基础,主要用于储存无人机特定队形时各无人机的飞行数据,包括无人机相对于有人机的期望位置信息,当需要变换队形时,输入编队指令,可以从队形库模块2获取无人机期望位置,经过动作库模块3计算规划各无人机机动动作,以自动进行编队变换。如图9-图12所示,本发明公开了4种基础编队队形,分别为:直线编队(图9)、楔形编队(图10)、四角护卫编队(图11)和梯形编队(图12)。根据实际需求可以增加更多形态的编队。
动作库模块3是一个任务规划模块,主要包含7种基本机动动作;如图6-图8所示,7种基本机动动作以无人机机体12为参考对象,包括匀速直线飞行5、匀加速直线飞行6、无人机拉起7、无人机俯冲8、匀减速直线运动9、协调左转弯10和协调右转弯11。从队形库模块2获取各飞机状态信息后,根据队形变换后各无人机期望位置计算和规划各无人机飞行航路,排除航线交错航路规划方案后,将各无人机的机动拆解为基本机动动作,以避免机动过载过大和出现不符合动力学约束的航路规划方案。本发明提出四种基本编队队形和7种基本机动动作,同时提出将基本编队之间变换的机动动作进行封装储存。The
动作库模块3计算得到各无人机机动动作规划后,将规划信息封装到无人机动作指令分别发送到各无人机UAV模块4中,每架无人机接收到的无人机动作指令都有所区别。After the
无人机UAV模块4均采用固定翼无人机,搭载了雷达、自驾仪和通信设备,接收到无人机动作指令后开始按照指令内的信息进行机动作动,开始队形变换。在编队飞行过程中不断将自身飞行数据发送到有人机MAV模块1,形成数据反馈。机载雷达用于识别有人机MAV模块1和其他无人机,识别MAV以获取实际相对位置信息,自驾仪根据相对位置信息和无人机动作指令控制无人机做出机动前往新编队队形中该无人机的期望位置,并保持跟随;识别无人机以避开防止机间碰撞。
参见图13,以四角护卫编队变换到梯形编队为实例。变换之前,有人、无人飞机协同编队队形为四角护卫编队,需要变换到梯形编队。如果让各无人机自动规划航线,则可能出现航线交错,导致无人机相撞的情况,于是采用本发明提出的变换方法。Referring to Fig. 13, it is an example to change from the four-corner guard formation to the echelon formation. Before the transformation, the coordinated formation of manned and unmanned aircraft is a four-corner guard formation, which needs to be transformed into an echelon formation. If each unmanned aerial vehicle is allowed to automatically plan the route, the route may be staggered, resulting in the collision of the unmanned aerial vehicles, so the transformation method proposed by the present invention is adopted.
飞行员根据变换需求选择编队变换指令,指令储存楔形编队代码,间隔指令储存默认编队距离,将编队指令发送到队形库模块2,计算出各无人机新的期望位置,发送到动作库模块3,动作库模块3根据期望位置信息和飞机状态数据计算得到各无人机航路规划方案。The pilot selects the formation transformation command according to the transformation requirements, the command stores the wedge formation code, the interval command stores the default formation distance, and sends the formation command to the
由于是4种基本编队队形之间的变换,队形变换比较简单,可以提前存储一种航路规划方案,以加快变换速度。Since it is a transformation between the four basic formation formations, the formation transformation is relatively simple, and a route planning scheme can be stored in advance to speed up the transformation.
以图14为例,根据无人机实际位置与期望位置设计航路,无人机编队中包含:无人机UAV1、无人机UAV2、无人机UAV3和无人机UAV4;其中,无人机UAV1向右机动,具体动作分解为:匀加速直线-协调右转-协调左转-匀减速直线-匀速;无人机UAV2向左机动:匀加速直线-协调左转-协调右转-匀减速直线-匀速;无人机UAV3和无人机UAV4机动比较简单,匀加速后减速即可。当编队比较密集时,无人机在机载雷达的帮助下进行机间协调防撞。Taking Figure 14 as an example, the route is designed according to the actual position and expected position of the UAV. The UAV formation includes: UAV1, UAV2, UAV3 and UAV4; among them, UAV UAV1 maneuvers to the right, and the specific actions are decomposed into: uniform acceleration straight line-coordinated right turn-coordinated left turn-uniform deceleration straight line-uniform speed; UAV UAV2 left maneuvering: uniform acceleration straight line-coordinated left turn-coordinated right turn-uniform deceleration Straight line-uniform speed; UAV3 and UAV4 are relatively simple to maneuver, just accelerate and then decelerate. When the formation is relatively dense, UAVs coordinate and avoid collisions between aircraft with the help of airborne radar.
图13和图14所示方案为本发明设计的两种航路规划方案,预先存储在动作库模块3中,实际实施时,动作库模块3预存航路规划方案可拓展。The schemes shown in Fig. 13 and Fig. 14 are two kinds of route planning schemes designed by the present invention, which are pre-stored in the
当没有预存航路规划方案时,动作库模块3在防止航路交错的条件下进行实时航路规划,然后将路线分解为基本机动动作发送到无人机,完成编队队形切换。When there is no pre-stored route planning scheme, the
本发明一实施例提供的计算装置。该实施例的计算装置包括:处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序。所述处理器执行所述计算机程序时实现上述各个方法实施例中的步骤,例如图1所示的步骤S1-S4。或者,所述处理器执行所述计算机程序时实现上述各装置实施例中各模块/单元的功能,例如动作执行模块。A computing device provided by an embodiment of the present invention. The computing device of this embodiment includes: a processor, a memory, and a computer program stored in the memory and operable on the processor. When the processor executes the computer program, the steps in the foregoing method embodiments are implemented, for example, steps S1-S4 shown in FIG. 1 . Alternatively, when the processor executes the computer program, it realizes the functions of each module/unit in the above-mentioned device embodiments, for example, an action execution module.
所述计算机程序可以被分割成一个或多个模块/单元,所述一个或者多个模块/单元被存储在所述存储器中,并由所述处理器执行,以完成本发明。The computer program may be divided into one or more modules/units, which are stored in the memory and executed by the processor to implement the present invention.
所述计算装置可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。所述计算装置可包括,但不仅限于,处理器、存储器。The computing device may be computing devices such as desktop computers, notebooks, palmtop computers, and cloud servers. The computing device may include, but is not limited to, a processor, memory.
所述处理器可以是中央处理单元(Central Processing Unit,CPU),还可以是其他通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。The processor can be a central processing unit (Central Processing Unit, CPU), and can also be other general-purpose processors, digital signal processors (Digital Signal Processor, DSP), application specific integrated circuits (Application Specific Integrated Circuit, ASIC), off-the-shelf Programmable gate array (Field-Programmable Gate Array, FPGA) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, etc.
所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现所述计算装置的各种功能。The memory can be used to store the computer programs and/or modules, and the processor realizes the computing by running or executing the computer programs and/or modules stored in the memory and calling the data stored in the memory Various functions of the device.
所述计算装置集成的模块/单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质可以包括:能够携带所述计算机程序代码的任何实体或装置、记录介质、U盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读介质不包括电载波信号和电信信号。If the modules/units integrated in the computing device are realized in the form of software function units and sold or used as independent products, they can be stored in a computer-readable storage medium. Based on this understanding, the present invention realizes all or part of the processes in the methods of the above embodiments, and can also be completed by instructing related hardware through a computer program. The computer program can be stored in a computer-readable storage medium, and the computer When the program is executed by the processor, the steps in the above-mentioned various method embodiments can be realized. Wherein, the computer program includes computer program code, and the computer program code may be in the form of source code, object code, executable file or some intermediate form. The computer-readable medium may include: any entity or device capable of carrying the computer program code, a recording medium, a USB flash drive, a removable hard disk, a magnetic disk, an optical disk, a computer memory, and a read-only memory (ROM, Read-Only Memory) , random access memory (RAM, Random Access Memory), electric carrier signal, telecommunication signal and software distribution medium, etc. It should be noted that the content contained in the computer-readable medium may be appropriately increased or decreased according to the requirements of legislation and patent practice in the jurisdiction. For example, in some jurisdictions, according to legislation and patent practice, computer-readable Excludes electrical carrier signals and telecommunication signals.
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。The above are only preferred embodiments of the present invention, and are not intended to limit the present invention. For those skilled in the art, the present invention may have various modifications and changes. Any modifications, equivalent replacements, improvements, etc. made within the spirit and principles of the present invention shall be included within the protection scope of the present invention.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211387337.3ACN115755958A (en) | 2022-11-07 | 2022-11-07 | Manned and unmanned aircraft cooperative formation form transformation method, system and device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211387337.3ACN115755958A (en) | 2022-11-07 | 2022-11-07 | Manned and unmanned aircraft cooperative formation form transformation method, system and device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115755958Atrue CN115755958A (en) | 2023-03-07 |
Family
ID=85357221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211387337.3APendingCN115755958A (en) | 2022-11-07 | 2022-11-07 | Manned and unmanned aircraft cooperative formation form transformation method, system and device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115755958A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119207176A (en)* | 2024-11-26 | 2024-12-27 | 中国民航管理干部学院 | Conflict detection method for collaborative operation of manned and unmanned aerial vehicles in urban scenarios |
| CN119356367A (en)* | 2024-11-05 | 2025-01-24 | 中国人民解放军空军指挥学院 | Manned and unmanned aerial vehicle collaborative route design method and system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107135105A (en)* | 2017-05-08 | 2017-09-05 | 合肥工业大学 | Unmanned-man-machine formation information interaction topology fault-tolerant optimization method and device |
| CN107643695A (en)* | 2017-09-07 | 2018-01-30 | 天津大学 | Someone/unmanned plane cluster formation VR emulation modes and system based on brain electricity |
| CN114442656A (en)* | 2021-12-17 | 2022-05-06 | 北京航空航天大学 | Manned/unmanned aerial vehicle co-converged cluster formation control method based on cluster space architecture |
| CN114967732A (en)* | 2022-04-15 | 2022-08-30 | 中国人民解放军海军航空大学 | Method and device for formation and aggregation of unmanned aerial vehicles, computer equipment and storage medium |
- 2022
- 2022-11-07CNCN202211387337.3Apatent/CN115755958A/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107135105A (en)* | 2017-05-08 | 2017-09-05 | 合肥工业大学 | Unmanned-man-machine formation information interaction topology fault-tolerant optimization method and device |
| CN107643695A (en)* | 2017-09-07 | 2018-01-30 | 天津大学 | Someone/unmanned plane cluster formation VR emulation modes and system based on brain electricity |
| CN114442656A (en)* | 2021-12-17 | 2022-05-06 | 北京航空航天大学 | Manned/unmanned aerial vehicle co-converged cluster formation control method based on cluster space architecture |
| CN114967732A (en)* | 2022-04-15 | 2022-08-30 | 中国人民解放军海军航空大学 | Method and device for formation and aggregation of unmanned aerial vehicles, computer equipment and storage medium |
Non-Patent Citations (2)
| Title |
|---|
| 吴立尧: "《基于人机合作的有人/无人机编队队形变换策略》", 《系统工程与电子技术》, 29 February 2020 (2020-02-29)* |
| 杨明月: "《 多四旋翼无人机编队保持与避碰控制》", 《航空学报》, 1 March 2022 (2022-03-01)* |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119356367A (en)* | 2024-11-05 | 2025-01-24 | 中国人民解放军空军指挥学院 | Manned and unmanned aerial vehicle collaborative route design method and system |
| CN119207176A (en)* | 2024-11-26 | 2024-12-27 | 中国民航管理干部学院 | Conflict detection method for collaborative operation of manned and unmanned aerial vehicles in urban scenarios |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115755958A (en) | Manned and unmanned aircraft cooperative formation form transformation method, system and device | |
| US10749952B2 (en) | Network based operation of an unmanned aerial vehicle based on user commands and virtual flight assistance constraints | |
| CN107831783B (en) | A ground station control system supporting autonomous flight of multiple UAVs | |
| AU2013293507B2 (en) | Three-dimensional manipulation of teams of quadrotors | |
| US11293777B2 (en) | Aid method for controlling the energy situation of an aircraft, associated computer program product and aid system for controlling | |
| CN108398958B (en) | Unmanned aerial vehicle formation path matching method and device and storage medium | |
| EP3476743A1 (en) | Control of diverse types of crew interface for flight control | |
| CN114217640A (en) | Safe flight control method and system for airplane multi-airplane intensive formation | |
| CN112136092A (en) | Flight control method and device and aircraft | |
| US11927460B2 (en) | Control of diverse types of crew interface for flight control | |
| CN112305974A (en) | Unmanned aerial vehicle cluster remote control method, system, device and equipment | |
| CN113589849A (en) | Unmanned aerial vehicle dynamic control method, system, equipment and storage medium | |
| CN111694377A (en) | Unmanned aerial vehicle cluster ground control visual system and control method | |
| CN118014463A (en) | Unmanned aerial vehicle team scheduling method and system for urban low altitude | |
| CN115657724A (en) | Manned and unmanned aircraft cooperative formation form transformation system and method | |
| CN112462801A (en) | Method for multi-machine formation of simulation models | |
| CN107305394B (en) | Control method, flight controller, terminal and control system of unmanned aerial vehicle | |
| CN117519274B (en) | Flight control simulation method and device, electronic equipment and storage medium | |
| CN114879741B (en) | Distributed fixed wing unmanned aerial vehicle coverage control method | |
| EP4356211B1 (en) | Systems and methods for concurrent management of multiple unmanned aircraft | |
| Pedai et al. | Comparison of single-rate and two-rate neural control approaches for coaxial rotor/ducted-fan TUAV for situational awareness applications | |
| Barkey et al. | Space efficient airspace geofence volume sizing | |
| Das et al. | A 3D Simulation Platform for Decentralized Decision-Making in Advanced Air Mobility | |
| Rudnick et al. | Flight testing of agent supervisory control on heterogeneous unmanned aerial system platforms | |
| CN114995514B (en) | Distributed flight collision avoidance method and device for multi-rotor unmanned aerial vehicle in two-dimensional plane |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |