CN115644929A - A Fetal Heart Orientation Detection System Applied in Ultrasound System - Google Patents
A Fetal Heart Orientation Detection System Applied in Ultrasound SystemDownload PDFInfo
- Publication number
- CN115644929A CN115644929ACN202211246918.5ACN202211246918ACN115644929ACN 115644929 ACN115644929 ACN 115644929ACN 202211246918 ACN202211246918 ACN 202211246918ACN 115644929 ACN115644929 ACN 115644929A
- Authority
- CN
- China
- Prior art keywords
- fetal heart
- ultrasonic probe
- navigation
- fetal
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及智能检测技术领域,特别涉及一种应用于超声系统中的胎心方位检测系统。The invention relates to the technical field of intelligent detection, in particular to a fetal heart position detection system applied in an ultrasonic system.
背景技术Background technique
目前在产科胎儿超声检查过程中,由于胎儿在孕妇体内的位置可能不同,想要找到胎儿心脏位置并进行超声成像,主要依靠超声医生变换超声探头成像角度来不断尝试找到胎儿心脏位置。这种方式过于依赖超声医生的技术水平,并且需要不断尝试和变换超声探头的不同角度,十分不便捷。At present, in the process of fetal ultrasound examination in obstetrics, because the position of the fetus in the pregnant woman's body may be different, if you want to find the position of the fetal heart and perform ultrasound imaging, you mainly rely on the sonographer to constantly try to find the position of the fetal heart by changing the imaging angle of the ultrasound probe. This method relies too much on the technical level of the ultrasound doctor, and needs to constantly try and change different angles of the ultrasound probe, which is very inconvenient.
发明内容Contents of the invention
本发明提供一种应用于超声系统中的胎心方位检测系统,用以通过矢量声学换能器与传统超声探头相结合,构成一种新的应用于超声成像系统的胎心方位自动检测和导航系统,使寻找胎儿心脏的过程不过度依赖于超声医生的技术水平,自动化便捷的帮助超声医生进行胎儿心脏的相关成像。The invention provides a fetal heart azimuth detection system applied in an ultrasonic system, which is used to combine a vector acoustic transducer with a traditional ultrasonic probe to form a new automatic detection and navigation of a fetal heart azimuth applied to an ultrasonic imaging system The system makes the process of finding the fetal heart not overly dependent on the technical level of the sonographer, and automatically and conveniently helps the sonographer to perform related imaging of the fetal heart.
本发明提供的一种应用于超声系统中的胎心方位检测系统,包括:A fetal heart position detection system applied in an ultrasound system provided by the present invention includes:
超声探头和定位导航子系统;Ultrasound probe and positioning and navigation subsystem;
其中,所述定位导航子系统用于通过矢量水听器确定孕妇体内的胎儿心脏位置,并根据胎儿心脏位置为超声探头进行移动导航。Wherein, the positioning and navigation subsystem is used to determine the position of the fetal heart in the pregnant woman through the vector hydrophone, and perform mobile navigation for the ultrasonic probe according to the position of the fetal heart.
优选的,所述超声探头为用于观察解剖结构的超声阵列探头或用于测量胎心的超声探头。Preferably, the ultrasonic probe is an ultrasonic array probe for observing anatomical structures or an ultrasonic probe for measuring fetal heart.
优选的,所述定位导航子系统包括:Preferably, the positioning and navigation subsystem includes:
信号检测模块,用于通过矢量水听器接收孕妇的人体声波信号;The signal detection module is used to receive the human body acoustic wave signal of the pregnant woman through the vector hydrophone;
信号处理模块,用于对人体声波信号进行处理得到胎儿心跳信号;The signal processing module is used to process the human body acoustic wave signal to obtain the fetal heartbeat signal;
心脏定位模块,用于根据胎儿心跳信号确定当前胎儿心脏相对于超声探头的第一位置关系;A heart positioning module, configured to determine the current first positional relationship of the fetal heart relative to the ultrasound probe according to the fetal heartbeat signal;
位置导航模块,用于根据预设的检测位置要求以及所述第一位置关系生成导航信息;A location navigation module, configured to generate navigation information according to preset detection location requirements and the first location relationship;
导航显示模块,用于通过显示器显示定位和导航信息,其中,显示器包括液晶屏幕、虚拟现实眼镜以及投影设备。The navigation display module is used to display positioning and navigation information through a display, wherein the display includes a liquid crystal screen, virtual reality glasses and projection equipment.
优选的,所述信号检测模块包括至少一个的矢量水听器,所有矢量水听器均固定设置在超声探头周围。Preferably, the signal detection module includes at least one vector hydrophone, and all vector hydrophones are fixedly arranged around the ultrasonic probe.
优选的,所述矢量水听器在超声探头接触孕妇腹部时通过被动感知的方式接收孕妇的人体声波信号。Preferably, the vector hydrophone receives the human body acoustic wave signal of the pregnant woman through passive sensing when the ultrasonic probe touches the pregnant woman's abdomen.
优选的,所述超声探头上还设置有空间位移传感器,在进行导航工作时建立空间直角坐标系并基于空间位移传感器所采集的数据为超声探头导航。Preferably, the ultrasonic probe is also provided with a spatial displacement sensor, and a spatial Cartesian coordinate system is established during navigation, and the ultrasonic probe is navigated based on the data collected by the spatial displacement sensor.
优选的,所述信号处理模块包括:Preferably, the signal processing module includes:
信号前处理单元,用于对人体声波信号进行平滑滤波处理;The signal pre-processing unit is used for smoothing and filtering the human body acoustic wave signal;
信号分离单元,用于对人体声波信号进行分离得到胎儿心跳信号。The signal separation unit is used to separate the human body acoustic wave signal to obtain the fetal heartbeat signal.
优选的,所述心脏定位模块执行以下操作:Preferably, the heart positioning module performs the following operations:
根据胎儿心跳信号确定当前胎儿心脏相对于矢量水听器的第二位置关系;determining the second positional relationship of the current fetal heart relative to the vector hydrophone according to the fetal heartbeat signal;
基于预设的矢量水听器相对于超声探头的第三位置关系,根据所述第二位置关系确定胎儿心脏相对于超声探头的第一位置关系。Based on the preset third positional relationship of the vector hydrophone relative to the ultrasonic probe, the first positional relationship of the fetal heart relative to the ultrasonic probe is determined according to the second positional relationship.
优选的,所述导航信息包括超声探头从当前位置状态达到满足检测位置要求的状态的过程中所需要移动的方向、距离以及面向角度。Preferably, the navigation information includes the direction, distance and facing angle that the ultrasonic probe needs to move from the current position state to the state meeting the detection position requirements.
优选的,还包括提示模块,所述提示模块用于在超声探头满足检测位置要求后进行位置正确提示,并向超声探头下达超声检测指令。Preferably, a prompting module is also included, the prompting module is used for prompting the correct position of the ultrasonic probe after meeting the detection position requirements, and issuing an ultrasonic detection instruction to the ultrasonic probe.
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
附图说明Description of drawings
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:The accompanying drawings are used to provide a further understanding of the present invention, and constitute a part of the description, and are used together with the embodiments of the present invention to explain the present invention, and do not constitute a limitation to the present invention. In the attached picture:
图1为本发明实施例中一种应用于超声系统中的胎心方位检测系统的结构示意图;FIG. 1 is a schematic structural diagram of a fetal heart position detection system applied to an ultrasound system in an embodiment of the present invention;
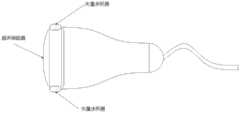
图2为本发明实施例中检测探头的结构示意图;Fig. 2 is the structural representation of detection probe in the embodiment of the present invention;
图3为本发明实施例中一种应用于超声系统中的胎心方位检测系统的信号处理步骤流程图;Fig. 3 is a flow chart of signal processing steps of a fetal heart position detection system applied to an ultrasound system in an embodiment of the present invention;
图4为本发明实施例中一种应用于超声系统中的胎心方位检测系统的使用方法步骤流程图。FIG. 4 is a flow chart of steps in a method for using a fetal heart position detection system applied to an ultrasound system in an embodiment of the present invention.
具体实施方式Detailed ways
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
本发明实施例提供了本发明提供的一种应用于超声系统中的胎心方位检测系统,如图1,包括The embodiment of the present invention provides a fetal heart position detection system applied in the ultrasonic system provided by the present invention, as shown in Fig. 1, including
超声探头1和定位导航子系统2;
其中,定位导航子系统2用于通过矢量水听器确定孕妇体内的胎儿心脏位置,并根据胎儿心脏位置为超声探头进行移动导航。Among them, the positioning and
上述技术方案的工作原理为:通过矢量声学换能器(矢量水听器)对胎儿心跳位置进行定位,确定胎儿心跳位置与矢量水听器之间的位置关系,然后基于矢量水听器与超声探头之间的位置关系进行位置关系转换,得到胎儿心跳位置与超声探头之间的位置,最后可以基于预设的标准检测位置为超声探头进行移动导航。The working principle of the above-mentioned technical scheme is: the position of the fetal heartbeat is positioned through the vector acoustic transducer (vector hydrophone), the positional relationship between the fetal heartbeat position and the vector hydrophone is determined, and then based on the vector hydrophone and the ultrasonic The positional relationship between the probes is transformed to obtain the position between the fetal heartbeat position and the position of the ultrasonic probe, and finally the mobile navigation for the ultrasonic probe can be performed based on the preset standard detection position.
上述技术方案的有益效果为:通过矢量声学换能器与传统超声探头相结合,构成一种新的应用于超声成像系统的胎心方位自动检测和导航系统,使寻找胎儿心脏的过程不过度依赖于超声医生的技术水平,自动化便捷的辅助超声医生进行胎儿心脏的相关成像。The beneficial effect of the above-mentioned technical solution is: through the combination of the vector acoustic transducer and the traditional ultrasonic probe, a new fetal heart position automatic detection and navigation system applied to the ultrasonic imaging system is formed, so that the process of finding the fetal heart does not rely too much on Based on the technical level of the sonographer, it can automatically and conveniently assist the sonographer to perform relevant imaging of the fetal heart.
在一个优选实施例中,超声探头为用于观察解剖结构的超声阵列探头或用于测量胎心的超声探头。In a preferred embodiment, the ultrasonic probe is an ultrasonic array probe for observing anatomical structures or an ultrasonic probe for measuring fetal heart.
上述技术方案的工作原理和有益效果为:在矢量水听器的辅助定位下可以选择通过观察解剖结构的超声阵列探头或用于测量胎心的超声探头进行胎儿心脏的相关成像,降低对超声探头的要求。The working principle and beneficial effect of the above-mentioned technical scheme are: under the auxiliary positioning of the vector hydrophone, the ultrasonic array probe for observing the anatomical structure or the ultrasonic probe for measuring the fetal heart can be selected to perform related imaging of the fetal heart, reducing the need for the ultrasonic probe. requirements.
在一个优选实施例中,定位导航子系统包括:In a preferred embodiment, the positioning and navigation subsystem includes:
信号检测模块,用于通过矢量水听器接收孕妇的人体声波信号;The signal detection module is used to receive the human body acoustic wave signal of the pregnant woman through the vector hydrophone;
信号处理模块,用于对人体声波信号进行处理得到胎儿心跳信号;The signal processing module is used to process the human body acoustic wave signal to obtain the fetal heartbeat signal;
心脏定位模块,用于根据胎儿心跳信号确定当前胎儿心脏相对于超声探头的第一位置关系;A heart positioning module, configured to determine the current first positional relationship of the fetal heart relative to the ultrasound probe according to the fetal heartbeat signal;
位置导航模块,用于根据预设的检测位置要求以及第一位置关系生成导航信息;A location navigation module, configured to generate navigation information according to a preset detection location requirement and a first location relationship;
导航显示模块,用于通过显示器显示定位和导航信息,其中,显示器包括液晶屏幕、虚拟现实眼镜以及投影设备。The navigation display module is used to display positioning and navigation information through a display, wherein the display includes a liquid crystal screen, virtual reality glasses and projection equipment.
上述技术方案的工作原理为:通过信号检测模块矢量水听器接收孕妇的人体声波信号,利用信号处理模块对人体声波信号进行处理和分离得到胎儿心跳信号,利用心脏定位模块根据胎儿心跳信号确定当前胎儿心脏相对于超声探头的第一位置关系,利用位置导航模块根据预设的检测位置要求以及第一位置关系生成导航信息,其中检测位置要求包括检测距离与检测角度,根据第一位置关系确定当前超声探头与胎儿心脏之间的距离以及超声探头的正对方向和胎儿心脏相对于超声探头方向的夹角,当超声探头与胎儿心脏之间的距离处于预设的检测距离之内并且超声探头的正对方向和胎儿心脏相对于超声探头方向的夹角小于预设的检测角度时,确定超声探头当前检测位置为胎儿心脏位置。当第一位置不满足检测位置要求时,根据距离偏差和角度偏差来提供导航信息。最后通过导航显示模块,通过显示器显示定位和导航信息,其中,显示器包括液晶屏幕、虚拟现实眼镜以及投影设备。The working principle of the above-mentioned technical scheme is: the human body acoustic wave signal of the pregnant woman is received by the vector hydrophone of the signal detection module, the human body acoustic wave signal is processed and separated by the signal processing module to obtain the fetal heartbeat signal, and the current fetal heartbeat signal is determined by the heart positioning module according to the fetal heartbeat signal. For the first positional relationship of the fetal heart relative to the ultrasonic probe, use the position navigation module to generate navigation information according to the preset detection position requirements and the first positional relationship, wherein the detection position requirements include detection distance and detection angle, and determine the current position according to the first positional relationship The distance between the ultrasound probe and the fetal heart and the angle between the facing direction of the ultrasound probe and the direction of the fetal heart relative to the ultrasound probe, when the distance between the ultrasound probe and the fetal heart is within the preset detection distance and the ultrasound probe’s When the angle between the facing direction and the direction of the fetal heart relative to the direction of the ultrasound probe is smaller than the preset detection angle, it is determined that the current detection position of the ultrasound probe is the position of the fetal heart. When the first position does not meet the detection position requirement, the navigation information is provided according to the distance deviation and the angle deviation. Finally, through the navigation display module, the positioning and navigation information is displayed through the display, wherein the display includes a liquid crystal screen, virtual reality glasses and projection equipment.
上述技术方案的有益效果为:通过矢量水听器的声测定位技术,对胎儿心脏的位置进行定位,比起人工通过超声图像进行判断定位的方式更为快速,提高医护人员的检测速度,降低对医护人员的检测经验要求。The beneficial effect of the above-mentioned technical scheme is: the position of the fetal heart is positioned through the acoustic positioning technology of the vector hydrophone, which is faster than the way of manually judging and positioning through the ultrasonic image, improving the detection speed of medical staff, reducing the Testing experience requirements for medical staff.
在一个优选实施例中,如图2,信号检测模块包括至少一个的矢量水听器,所有矢量水听器均固定设置在超声探头周围,In a preferred embodiment, as shown in Figure 2, the signal detection module includes at least one vector hydrophone, and all vector hydrophones are fixedly arranged around the ultrasonic probe,
上述技术方案的工作原理和有益效果为:通过在超声探头周围设置矢量水听器进行辅助,确定超声探头的检测位置是否为胎儿的心脏位置,矢量水听器和超声探头相对位置固定并且和人体接触良好。The working principle and beneficial effects of the above-mentioned technical scheme are as follows: by arranging vector hydrophones around the ultrasonic probe for assistance, it is determined whether the detection position of the ultrasonic probe is the heart position of the fetus, and the relative positions of the vector hydrophone and the ultrasonic probe are fixed and connected to the human body. Good contact.
在一个优选实施例中,矢量水听器在超声探头接触孕妇腹部时通过被动感知的方式接收孕妇的人体声波信号。In a preferred embodiment, the vector hydrophone receives the human body acoustic wave signal of the pregnant woman through passive sensing when the ultrasonic probe touches the pregnant woman's abdomen.
上述技术方案的工作原理和有益效果为:当此新型超声探头接触孕妇腹部时,矢量水听器通过被动感知的方式,可以收集到人体内的声波信号,实现对孕妇体内声波信号的采集,通过被动感知的信号收集方式不会对孕妇本身带来影响。The working principle and beneficial effects of the above-mentioned technical scheme are: when the new ultrasonic probe touches the abdomen of a pregnant woman, the vector hydrophone can collect the sound wave signal in the human body through passive sensing, and realize the collection of the sound wave signal in the pregnant woman's body. The signal collection method of passive perception will not affect the pregnant woman itself.
在一个优选实施例中,超声探头上还设置有空间位移传感器,在进行导航工作时建立空间直角坐标系并基于空间位移传感器所采集的数据为超声探头导航。In a preferred embodiment, the ultrasonic probe is further provided with a spatial displacement sensor, and a spatial Cartesian coordinate system is established during navigation, and the ultrasonic probe is navigated based on the data collected by the spatial displacement sensor.
上述技术方案的工作原理和有益效果为:在超声探头上设置空间位移传感器并设置空间坐标系来感知超声探头的移动方向和移动距离,从而为超声探头提供更准确的导航依据,在导航时为超声探头显示移动方向和移动距离。The working principle and beneficial effect of the above-mentioned technical solution are as follows: a spatial displacement sensor is set on the ultrasonic probe and a spatial coordinate system is set to sense the moving direction and moving distance of the ultrasonic probe, thereby providing a more accurate navigation basis for the ultrasonic probe, and providing The ultrasound probe shows the direction and distance of movement.
在一个优选实施例中,信号处理模块包括:In a preferred embodiment, the signal processing module includes:
信号前处理单元,用于对人体声波信号进行平滑滤波处理;The signal pre-processing unit is used for smoothing and filtering the human body acoustic wave signal;
信号分离单元,用于对人体声波信号进行分离得到胎儿心跳信号。The signal separation unit is used to separate the human body acoustic wave signal to obtain the fetal heartbeat signal.
上述技术方案的工作原理为:通过信号前处理单元对人体声波信号进行平滑滤波处理滤除人体声波信号中的噪声,防止噪声对检测结果带来误差,然后通过信号分离单元对人体声波信号中人体内脏振动信号(例如孕妇本身的心跳信号、肺部呼吸振动信号等等)进行分离得到胎儿心跳信号,实现对干净的胎儿心跳信号的采集。The working principle of the above-mentioned technical solution is as follows: the human body acoustic wave signal is smoothed and filtered through the signal pre-processing unit to filter out the noise in the human body acoustic wave signal, so as to prevent the noise from bringing errors to the detection results, and then the human body in the human body acoustic wave signal is analyzed by the signal separation unit. The visceral vibration signal (such as the heartbeat signal of the pregnant woman itself, the lung breathing vibration signal, etc.) is separated to obtain the fetal heartbeat signal, so as to realize the collection of clean fetal heartbeat signals.
在一个优选实施例中,心脏定位模块执行以下操作:In a preferred embodiment, the cardiac positioning module performs the following operations:
根据胎儿心跳信号确定当前胎儿心脏相对于矢量水听器的第二位置关系;determining the second positional relationship of the current fetal heart relative to the vector hydrophone according to the fetal heartbeat signal;
基于预设的矢量水听器相对于超声探头的第三位置关系,根据第二位置关系确定胎儿心脏相对于超声探头的第一位置关系。Based on the preset third positional relationship of the vector hydrophone relative to the ultrasonic probe, the first positional relationship of the fetal heart relative to the ultrasonic probe is determined according to the second positional relationship.
上述技术方案的工作原理和有益效果为:根据胎儿心跳信号对胎儿心脏的位置进行定位,从而确定当前胎儿心脏相对于矢量水听器的第二位置关系,然后基于预设的矢量水听器相对于超声探头的第三位置关系,根据第二位置关系确定胎儿心脏相对于超声探头的第一位置关系,实现对胎儿心脏相对于超声探头的位置关系的计算。例如,图4,对于K个矢量水听器所采集的胎儿心跳信号A′(n,t),n=1,2,...,K,根据K个矢量水听器所采集的胎儿心跳信号A′(n,t)确定当前胎儿心脏相对于每个矢量水听器的第二位置关系Hpos(x,y,z),然后基于每个矢量水听器相对于超声探头的第三位置关系pos(K)={x,y,z,ax,ay,az},其中x,y,z为矢量水听器相对于超声探头的位置坐标ax,ay,az为矢量水听器相对于超声探头的方向角,根据第二位置关系确定胎儿心脏相对于超声探头的第一位置关系heart_pos(x,y,z)。The working principle and beneficial effects of the above-mentioned technical solution are as follows: the position of the fetal heart is positioned according to the fetal heartbeat signal, so as to determine the current second positional relationship of the fetal heart relative to the vector hydrophone, and then based on the preset vector hydrophone relative Based on the third positional relationship of the ultrasonic probe, the first positional relationship of the fetal heart relative to the ultrasonic probe is determined according to the second positional relationship, so as to realize the calculation of the positional relationship of the fetal heart relative to the ultrasonic probe. For example, Fig. 4, for the fetal heartbeat signal A' (n, t) collected by K vector hydrophones, n=1, 2,..., K, according to the fetal heartbeat signal collected by K vector hydrophones The signal A'(n, t) determines the second position relationship Hpos(x, y, z) of the current fetal heart relative to each vector hydrophone, and then based on the third position of each vector hydrophone relative to the ultrasonic probe Relation pos(K)={x, y, z, ax, ay, az}, where x, y, z are the position coordinates of the vector hydrophone relative to the ultrasonic probe ax, ay, az are the position coordinates of the vector hydrophone relative to the ultrasonic probe The orientation angle of the ultrasound probe is used to determine the first position relationship heart_pos(x, y, z) of the fetal heart relative to the ultrasound probe according to the second position relationship.
在一个优选实施例中,导航信息包括超声探头从当前位置状态达到满足检测位置要求的状态的过程中所需要移动的方向、距离以及面向角度。In a preferred embodiment, the navigation information includes the direction, distance and facing angle that the ultrasonic probe needs to move during the process from the current position state to the state meeting the detection position requirements.
上述技术方案的工作原理和有益效果为:通过计算出超声探头从当前位置状态达到满足检测位置要求的状态的过程中所需要移动的方向、距离以及面向角度并直接在导航界面进行显示,让医护人员能够直观地了解到导航移动要求,提高导航效率。The working principle and beneficial effects of the above-mentioned technical solution are as follows: by calculating the direction, distance and facing angle that the ultrasonic probe needs to move from the current position state to the state that meets the detection position requirements, and directly displaying it on the navigation interface, it allows medical staff to Personnel can intuitively understand the navigation movement requirements and improve navigation efficiency.
在一个优选实施例中,还包括提示模块,提示模块用于在超声探头满足检测位置要求后进行位置正确提示,并向超声探头下达超声检测指令。In a preferred embodiment, it also includes a prompting module, which is used to prompt the correct position of the ultrasonic probe after meeting the detection position requirements, and issue ultrasonic detection instructions to the ultrasonic probe.
上述技术方案的工作原理和有益效果为:在超声探头满足检测位置要求后进行位置正确提示,防止医护人员对超声探头进行位置移动导致定位不准确。The working principle and beneficial effect of the above technical solution are as follows: after the ultrasonic probe meets the detection position requirements, the correct position prompt is given to prevent the medical staff from moving the ultrasonic probe to cause inaccurate positioning.
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。Obviously, those skilled in the art can make various changes and modifications to the present invention without departing from the spirit and scope of the present invention. Thus, if these modifications and variations of the present invention fall within the scope of the claims of the present invention and their equivalent technologies, the present invention also intends to include these modifications and variations.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211246918.5ACN115644929A (en) | 2022-10-12 | 2022-10-12 | A Fetal Heart Orientation Detection System Applied in Ultrasound System |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211246918.5ACN115644929A (en) | 2022-10-12 | 2022-10-12 | A Fetal Heart Orientation Detection System Applied in Ultrasound System |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115644929Atrue CN115644929A (en) | 2023-01-31 |
Family
ID=84987960
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211246918.5APendingCN115644929A (en) | 2022-10-12 | 2022-10-12 | A Fetal Heart Orientation Detection System Applied in Ultrasound System |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115644929A (en) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4672976A (en)* | 1986-06-10 | 1987-06-16 | Cherne Industries, Inc. | Heart sound sensor |
| CN103479386A (en)* | 2013-09-02 | 2014-01-01 | 无锡慧思顿科技有限公司 | System for identifying and diagnosing rheumatic heart disease based on sound sensors and diagnostic method |
| WO2015082987A1 (en)* | 2013-12-06 | 2015-06-11 | Secretary, Department Of Biotechnology | Fetomaternal parameter monitoring system |
| CN105496462A (en)* | 2016-01-19 | 2016-04-20 | 深圳市理邦精密仪器股份有限公司 | Positioning method and device for fetal heart |
| CN108710108A (en)* | 2018-06-20 | 2018-10-26 | 上海掌门科技有限公司 | A kind of auscultation apparatus and its automatic positioning method |
| CN109730722A (en)* | 2019-02-27 | 2019-05-10 | 天津大学 | Elastography method based on focused ultrasound acousto-vibration signal |
| CN111265243A (en)* | 2020-02-21 | 2020-06-12 | 孙磊 | Fetal heart monitoring system, device and method based on multi-dimensional channel sensor |
| CN111714150A (en)* | 2020-06-28 | 2020-09-29 | 循音智能科技(上海)有限公司 | A method for evaluating and collecting heart sound signals |
| CN111743573A (en)* | 2020-07-07 | 2020-10-09 | 孙梅娟 | Fetal heart instrument and fetal heart positioning method |
| CN112998753A (en)* | 2021-02-19 | 2021-06-22 | 浙江大学温州研究院 | Fetal heart detection system with fetal heart position guiding function |
- 2022
- 2022-10-12CNCN202211246918.5Apatent/CN115644929A/enactivePending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4672976A (en)* | 1986-06-10 | 1987-06-16 | Cherne Industries, Inc. | Heart sound sensor |
| CN103479386A (en)* | 2013-09-02 | 2014-01-01 | 无锡慧思顿科技有限公司 | System for identifying and diagnosing rheumatic heart disease based on sound sensors and diagnostic method |
| WO2015082987A1 (en)* | 2013-12-06 | 2015-06-11 | Secretary, Department Of Biotechnology | Fetomaternal parameter monitoring system |
| CN105496462A (en)* | 2016-01-19 | 2016-04-20 | 深圳市理邦精密仪器股份有限公司 | Positioning method and device for fetal heart |
| CN108710108A (en)* | 2018-06-20 | 2018-10-26 | 上海掌门科技有限公司 | A kind of auscultation apparatus and its automatic positioning method |
| CN109730722A (en)* | 2019-02-27 | 2019-05-10 | 天津大学 | Elastography method based on focused ultrasound acousto-vibration signal |
| CN111265243A (en)* | 2020-02-21 | 2020-06-12 | 孙磊 | Fetal heart monitoring system, device and method based on multi-dimensional channel sensor |
| CN111714150A (en)* | 2020-06-28 | 2020-09-29 | 循音智能科技(上海)有限公司 | A method for evaluating and collecting heart sound signals |
| CN111743573A (en)* | 2020-07-07 | 2020-10-09 | 孙梅娟 | Fetal heart instrument and fetal heart positioning method |
| CN112998753A (en)* | 2021-02-19 | 2021-06-22 | 浙江大学温州研究院 | Fetal heart detection system with fetal heart position guiding function |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5454844B2 (en) | Ultrasonic diagnostic apparatus, ultrasonic image display apparatus, and ultrasonic image display program | |
| US6475149B1 (en) | Border detection method and system | |
| CN103505288B (en) | Ultrasonic imaging method and supersonic imaging apparatus | |
| US20230181148A1 (en) | Vascular system visualization | |
| CN110087550B (en) | Ultrasonic image display method, equipment and storage medium | |
| US20050101864A1 (en) | Ultrasound diagnostic imaging system and method for 3D qualitative display of 2D border tracings | |
| US20170181726A1 (en) | Haptic feedback for ultrasound image acquisition | |
| CN102197316A (en) | 3-D ultrasound imaging | |
| CN104902839B (en) | Use the registering system and method for ultrasonic probe | |
| CN109923432A (en) | Systems and methods for tracking interventional instruments using feedback on tracking reliability | |
| US11532084B2 (en) | Gating machine learning predictions on medical ultrasound images via risk and uncertainty quantification | |
| JP2016523163A (en) | System and method for mapping of ultrasonic shear wave elastography measurements | |
| EP2506215B1 (en) | Information processing apparatus, imaging system, information processing method, and program causing computer to execute information processing | |
| CN101612048A (en) | Ultrasonic probe and ultrasonic scanning device | |
| US20210345986A1 (en) | Automatic evaluation of ultrasound protocol trees | |
| JP2018023610A (en) | Ultrasonic measuring apparatus and control method | |
| CN114601494A (en) | Ultrasonic diagnostic system and operation support method | |
| JP2015154885A (en) | Blood pressure measurement device | |
| CN112545549A (en) | Ultrasonic imaging system | |
| CN115644929A (en) | A Fetal Heart Orientation Detection System Applied in Ultrasound System | |
| KR20190085342A (en) | Method for controlling ultrasound imaging apparatus and ultrasound imaging aparatus thereof | |
| US12144682B2 (en) | Automation-assisted venous congestion assessment in point of care ultrasound | |
| JP2023122622A (en) | Method and system for tracking and visualizing medical devices | |
| WO2023230999A1 (en) | Convex/linear array biplanar probe and application method thereof in prostate volume calculation | |
| CN112672692B (en) | Ultrasonic imaging method, ultrasonic imaging device and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | ||
| CB02 | Change of applicant information | Country or region after:China Address after:100000 No. 9, Yishengkeji Road, Changping District, Beijing Building 4, 3rd Floor, Room 303-24 Applicant after:Yi Chao Medical Technology (Beijing) Co., Ltd. Address before:100000 No. 9, Yishengkeji Road, Changping District, Beijing Building 4, 3rd Floor, Room 303-24 Applicant before:Yichao Medical Technology (Beijing) Co.,Ltd. Country or region before:China |