CN115585809A - Patrol method and system for warehouse patrol robot and readable storage medium - Google Patents
Patrol method and system for warehouse patrol robot and readable storage mediumDownload PDFInfo
- Publication number
- CN115585809A CN115585809ACN202211187860.1ACN202211187860ACN115585809ACN 115585809 ACN115585809 ACN 115585809ACN 202211187860 ACN202211187860 ACN 202211187860ACN 115585809 ACN115585809 ACN 115585809A
- Authority
- CN
- China
- Prior art keywords
- information
- patrol
- slam
- robot
- patrol robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/022—Optical sensing devices using lasers
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/383—Indoor data
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3837—Data obtained from a single source
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B19/00—Alarms responsive to two or more different undesired or abnormal conditions, e.g. burglary and fire, abnormal temperature and abnormal rate of flow
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本申请涉及数据处理和数据传输领域,更具体的,涉及一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法、系统和可读存储介质。The present application relates to the field of data processing and data transmission, and more specifically, relates to a patrol method, system and readable storage medium of a power material warehouse patrol robot based on ROS system and SLAM.
背景技术Background technique
电力物资仓储管理是保障一线电力设施安全运行及保持物资价值和使用价值的坚实后盾。为更好地保障仓库货物的安全,提高库内物资的保管质量,保障库内物资的安全,提升仓储管理水平,积极发展建设电力物资智能化仓库。随着人工智能和机器人领域的快速发展,机器人在工业智能制造、智能物流、智能交通、及日常生活中的应用广泛。Power material storage management is a solid backing to ensure the safe operation of front-line power facilities and maintain the value and use value of materials. In order to better protect the safety of warehouse goods, improve the storage quality of materials in the warehouse, ensure the safety of materials in the warehouse, improve the level of storage management, and actively develop and build intelligent warehouses for power materials. With the rapid development of artificial intelligence and robotics, robots are widely used in industrial intelligent manufacturing, intelligent logistics, intelligent transportation, and daily life.
由于仓库的温度、湿度等环境因素异常时,会对部分电力重要物资与设施的使用寿命带来相当大的损害,尤其在夏季,夏季季节的室内湿度高,容易产生静电,影响后续设备的安全运行。而且由于缺少值守人员的人工监控和调解,设备安全问题以及外来人员进入仓库的资产安全问题等也值得重视。Due to abnormal environmental factors such as temperature and humidity in the warehouse, it will cause considerable damage to the service life of some important power supplies and facilities, especially in summer, when the indoor humidity is high in the summer season, it is easy to generate static electricity, which affects the safety of subsequent equipment run. Moreover, due to the lack of manual monitoring and mediation of on-duty personnel, equipment safety issues and asset safety issues when outsiders enter the warehouse are also worthy of attention.
目前,巡检机器人定位导航方式大多采用有轨方式或全球定位系统(globalpositioning system,GPS)定位方式。有轨方式需要铺设预设轨道,对工厂环境破坏较大,成本较高,GPS定位方式精度较低,不能满足在室内狭小空间的精准定位。At present, most of the inspection robot positioning and navigation methods adopt a track method or a global positioning system (global positioning system, GPS) positioning method. The track method requires the laying of preset tracks, which will cause great damage to the factory environment and high cost. The GPS positioning method has low accuracy and cannot meet the precise positioning in small indoor spaces.
因此现有技术存在缺陷,急需改进。Therefore existing technology has defective, is badly in need of improvement.
发明内容Contents of the invention
鉴于上述问题,本发明的目的是提供一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法、系统和可读存储介质,能够更有效更快速的让仓库巡逻机器人对仓库进行巡逻。In view of the above problems, the object of the present invention is to provide a patrol method, system and readable storage medium of a power material warehouse patrol robot based on ROS system and SLAM, which can allow the warehouse patrol robot to patrol the warehouse more effectively and quickly.
本发明第一方面提供了一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法,包括:The first aspect of the present invention provides a patrol method of a power material warehouse patrol robot based on the ROS system and SLAM, including:
获取外部数据信息和SLAM地图模型;Obtain external data information and SLAM map model;
根据所述TF坐标数据和SLAM地图模型进行分析,得到巡逻机器人巡逻路线;Analyze according to the TF coordinate data and the SLAM map model, obtain the patrol route of the patrol robot;
将所述巡逻机器人巡逻路线发送至预设终端。Send the patrol route of the patrol robot to a preset terminal.
获取检测数据信息;Obtain detection data information;
将所述检测数据信息与预设阈值区间进行对比,若所述检测数据信息不处于预设阈值区间,则将预警信息发送至警报装置。The detection data information is compared with a preset threshold interval, and if the detection data information is not in the preset threshold interval, early warning information is sent to an alarm device.
本方案中,还包括:This program also includes:
获取外部数据信息;Obtain external data information;
通过第一预设方法对所述外部数据信息进行变换,得到坐标变换关系。The external data information is transformed by a first preset method to obtain a coordinate transformation relationship.
本方案中,所述SLAM地图模型通过激光雷达采集信息建立,包括:In this solution, the SLAM map model is established by collecting information from lidar, including:
获取激光雷达采集信息;Obtain lidar collection information;
根据第二预设方法对所述采集信息进行分析计算,得到目标物体的距离信息;Analyzing and calculating the collected information according to a second preset method to obtain distance information of the target object;
将所述目标物体的距离信息进行整合得到地图数据信息;Integrating the distance information of the target object to obtain map data information;
根据坐标变换关系对所述地图数据信息处理,建立SLAM地图模型。The map data information is processed according to the coordinate transformation relationship to establish a SLAM map model.
本方案中,还包括:This program also includes:
获取检测图像信息;Obtain detection image information;
将所述检测图像信息与预设背景图片或视频进行对比,得到检测物体影子图像信息;Comparing the detected image information with a preset background image or video to obtain shadow image information of the detected object;
根据所述检测物体影子图像信息进行分析,得到所述检测外来物体信息;analyzing according to the shadow image information of the detected object to obtain the detected foreign object information;
根据所述检测外来物体信息进行分析,若所述检测物体异常,则将预警信息发送至警报装置,以进行预警。Analysis is performed according to the detected foreign object information, and if the detected object is abnormal, early warning information is sent to an alarm device for early warning.
本方案中,对人员异常行为进行预警,包括:In this solution, early warnings are given to abnormal behaviors of personnel, including:
获取检测人体图像信息;Obtain and detect human body image information;
根据所述检测人体图像信息进行分析,得到所述检测人体的骨骼点信息;将所述所述检测人体的骨骼点信息与保存的人体骨骼点信息进行对比,若二者相同则不进行处理;若二者不同,则发送预警信息并对所述检测人员进行跟随。Analyzing according to the image information of the detected human body to obtain the skeleton point information of the detected human body; comparing the skeleton point information of the detected human body with the saved human skeleton point information, and not processing if the two are the same; If the two are different, an early warning message is sent and the detection personnel are followed.
本方案中,还包括:This program also includes:
获取传感器检测数据;Obtain sensor detection data;
根据所述传感器检测数据进行分析,若所述检测数据处于预设阈值区间,则不进行处理;Analyzing according to the sensor detection data, if the detection data is in the preset threshold range, no processing is performed;
若所述检测数据不处于预设阈值区间,则发送预警信息至服务器。If the detection data is not in the preset threshold range, then send early warning information to the server.
本发明第二方面提供了一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻系统,包括存储器和处理器,所述存储器中包括基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序,所述基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序被所述处理器执行时实现如下步骤:The second aspect of the present invention provides a patrol system of a power material warehouse patrol robot based on the ROS system and SLAM, including a memory and a processor, and the memory includes a patrol robot based on the ROS system and SLAM. Method program, the patrol method program of the power material warehouse patrol robot based on the ROS system and SLAM is implemented by the processor to implement the following steps:
获取外部数据信息和SLAM地图模型;Obtain external data information and SLAM map model;
根据所述TF坐标数据和SLAM地图模型进行分析,得到巡逻机器人巡逻路线;Analyze according to the TF coordinate data and the SLAM map model, obtain the patrol route of the patrol robot;
将所述巡逻机器人巡逻路线发送至预设终端。Send the patrol route of the patrol robot to a preset terminal.
获取检测数据信息;Obtain detection data information;
将所述检测数据信息与预设阈值区间进行对比,若所述检测数据信息不处于预设阈值区间,则将预警信息发送至警报装置。The detection data information is compared with a preset threshold interval, and if the detection data information is not in the preset threshold interval, early warning information is sent to an alarm device.
本方案中,还包括:This program also includes:
获取外部数据信息;Obtain external data information;
通过第一预设方法对所述外部数据信息进行变换,得到坐标变换关系。The external data information is transformed by a first preset method to obtain a coordinate transformation relationship.
本方案中,所述SLAM地图模型通过激光雷达采集信息建立,包括:In this solution, the SLAM map model is established by collecting information from lidar, including:
获取激光雷达采集信息;Obtain lidar collection information;
根据第二预设方法对所述采集信息进行分析计算,得到目标物体的距离信息;Analyzing and calculating the collected information according to a second preset method to obtain distance information of the target object;
将所述目标物体的距离信息进行整合得到地图数据信息;Integrating the distance information of the target object to obtain map data information;
根据坐标变换关系对所述地图数据信息处理,建立SLAM地图模型。The map data information is processed according to the coordinate transformation relationship to establish a SLAM map model.
本方案中,还包括:This plan also includes:
获取检测图像信息;Obtain detection image information;
将所述检测图像信息与预设背景图片或视频进行对比,得到检测物体影子图像信息;Comparing the detected image information with a preset background image or video to obtain shadow image information of the detected object;
根据所述检测物体影子图像信息进行分析,得到所述检测外来物体信息;analyzing according to the shadow image information of the detected object to obtain the detected foreign object information;
根据所述检测外来物体信息进行分析,若所述检测物体异常,则将预警信息发送至警报装置,以进行预警。Analysis is performed according to the detected foreign object information, and if the detected object is abnormal, early warning information is sent to an alarm device for early warning.
本方案中,对人员异常行为进行预警,包括:In this solution, early warnings are given to abnormal behaviors of personnel, including:
获取检测人体图像信息;Obtain and detect human body image information;
根据所述检测人体图像信息进行分析,得到所述检测人体的骨骼点信息;analyzing according to the image information of the detected human body to obtain the bone point information of the detected human body;
将所述所述检测人体的骨骼点信息与保存的人体骨骼点信息进行对比,若二者相同则不进行处理;若二者不同,则发送预警信息并对所述检测人员进行跟随。Comparing the skeleton point information of the detected human body with the saved human skeleton point information, if the two are the same, no processing is performed; if the two are different, an early warning message is sent and the detection personnel are followed.
本方案中,还包括:This program also includes:
获取传感器检测数据;Obtain sensor detection data;
根据所述传感器检测数据进行分析,若所述检测数据处于预设阈值区间,则不进行处理;Analyzing according to the sensor detection data, if the detection data is in the preset threshold range, no processing is performed;
若所述检测数据不处于预设阈值区间,则发送预警信息至服务器。If the detection data is not in the preset threshold range, then send early warning information to the server.
本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序,所述一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序被处理器执行时,实现如上述任一项所述的一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法的步骤。The third aspect of the present invention provides a computer-readable storage medium, the computer-readable storage medium includes a patrol method program based on the ROS system and SLAM for the patrol robot of the power material warehouse, and the one based on the ROS system When the patrol method program of the power material warehouse patrol robot built with SLAM is executed by the processor, the steps of the patrol method of a power material warehouse patrol robot built based on the ROS system and SLAM as described in any one of the above are realized.
本发明公开的一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法、系统和可读存储介质,通过传感器获取外部数据,通过监控界面,使巡逻机器人按既定线路巡逻;通过激光雷达数据建立地图信息。巡逻机器人通过已保存的地图信息实现最优路径规划、自主导航、自主定位的功能,最终完成仓库巡逻机器人的巡逻监控。另外,本申请还通过摄像头对外界环境的特定位置进行拍摄后与在原有库中的信息进行对比来初步实现监控、巡逻及报警的目的。The invention discloses a patrol method, system and readable storage medium of a power material warehouse patrol robot based on ROS system and SLAM, which acquires external data through a sensor, and makes the patrol robot patrol according to a predetermined route through a monitoring interface; through laser radar Data build map information. The patrol robot realizes the functions of optimal path planning, autonomous navigation, and autonomous positioning through the saved map information, and finally completes the patrol monitoring of the warehouse patrol robot. In addition, this application also preliminarily realizes the purpose of monitoring, patrolling and alarming by comparing the information in the original database with the information in the original database after the camera shoots a specific location of the external environment.
附图说明Description of drawings
图1示出了本发明一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法的流程图;Fig. 1 shows a kind of flow chart of the patrol method of the power material warehouse patrol robot based on ROS system and SLAM construction of the present invention;
图2示出了本发明一种SLAM地图模型建立方法的流程图;Fig. 2 shows the flowchart of a kind of SLAM map model establishment method of the present invention;
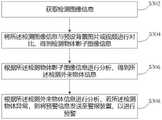
图3示出了本发明一种异常物体预警方法的流程图;Fig. 3 shows a flow chart of an abnormal object early warning method of the present invention;
图4示出了本发明一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻系统的框图。Fig. 4 shows a block diagram of a patrol system of a power material warehouse patrol robot based on the ROS system and SLAM of the present invention.
具体实施方式detailed description
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be noted that, in the case of no conflict, the embodiments of the present application and the features in the embodiments can be combined with each other.
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。In the following description, many specific details are set forth in order to fully understand the present invention. However, the present invention can also be implemented in other ways different from those described here. Therefore, the protection scope of the present invention is not limited by the specific details disclosed below. EXAMPLE LIMITATIONS.
图1示出了本发明一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法的流程图。FIG. 1 shows a flow chart of a patrol method of a power material warehouse patrol robot based on the ROS system and SLAM of the present invention.
如图1所示,本发明公开了一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法,包括:As shown in Fig. 1, the present invention discloses a patrol method of a power material warehouse patrol robot based on ROS system and SLAM, including:
S102,获取外部数据信息和SLAM地图模型;S102, acquiring external data information and a SLAM map model;
S104,根据所述TF坐标数据和SLAM地图模型进行分析,得到巡逻机器人巡逻路线;S104, analyze according to the TF coordinate data and the SLAM map model, and obtain the patrol route of the patrol robot;
S106,将所述巡逻机器人巡逻路线发送至预设终端;S106, sending the patrol route of the patrol robot to a preset terminal;
S108,获取检测数据信息;S108, acquiring detection data information;
S110,将所述检测数据信息与预设阈值区间进行对比,若所述检测数据信息不处于预设阈值区间,则将预警信息发送至警报装置。S110, comparing the detection data information with a preset threshold interval, and if the detection data information is not in the preset threshold interval, sending early warning information to an alarm device.
根据本发明实施例,通过传感器获取外部数据,通过监控界面,使巡逻机器人按既定线路巡逻;通过激光雷达数据建立地图信息。巡逻机器人通过已保存的地图信息实现最优路径规划、自主导航、自主定位的功能,最终完成仓库巡逻机器人的巡逻监控。利用TF坐标变换,就是ROS软件包需要机器人发布TF(target frame)变换树实现不同坐标系之间的平移与旋转;以及激光雷达数据进行SLAM(Simultaneous Localization And Mapping)也称同步定位与地图构建,机器人从未知环境的未知地点运动,通过运动过程观测地图目标、特征定位、自身位置和姿态。通过机器人操作系统ROS的可视化工具Rviz便可看到地图信息。机器人巡逻采用A*算法进行全局路径规划和局部路径规划来实现最优路径的选择,使机器人可以更加高效地完成相关功能。其中,所述预设终端为仓库巡逻机器人控制终端。According to the embodiment of the present invention, the external data is obtained through the sensor, and the patrol robot is patrolled according to the predetermined route through the monitoring interface; the map information is established through the laser radar data. The patrol robot realizes the functions of optimal path planning, autonomous navigation, and autonomous positioning through the saved map information, and finally completes the patrol monitoring of the warehouse patrol robot. Using TF coordinate transformation means that the ROS software package requires the robot to issue a TF (target frame) transformation tree to achieve translation and rotation between different coordinate systems; and SLAM (Simultaneous Localization And Mapping) on lidar data, also known as synchronous positioning and map construction, The robot moves from an unknown location in an unknown environment, and observes map targets, feature positioning, its own position and posture through the movement process. The map information can be seen through the visualization tool Rviz of the robot operating system ROS. The robot patrol uses the A* algorithm for global path planning and local path planning to realize the selection of the optimal path, so that the robot can complete related functions more efficiently. Wherein, the preset terminal is a warehouse patrol robot control terminal.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取外部数据信息;Obtain external data information;
通过第一预设方法对所述外部数据信息进行变换,得到坐标变换关系。The external data information is transformed by a first preset method to obtain a coordinate transformation relationship.
需要说明的是,所述第一预设方法为TF坐标变换方法,仓库巡逻机器人所采用的深度相机为奥比中光Orbbec Astra Pro深度相机,对仓库物品的温度、人员温度测量起着重要作用,同时机器人可通过深度相机扫描对人员信息进行存储,当外来人员入侵时对其进行扫描并与库中人员信息进行对比,以防范盗窃等情况的发生。It should be noted that the first preset method is the TF coordinate transformation method, and the depth camera used by the warehouse patrol robot is the Orbbec Astra Pro depth camera, which plays an important role in the temperature measurement of warehouse items and personnel , At the same time, the robot can store personnel information through deep camera scanning, and scan it when outsiders invade and compare it with the personnel information in the library to prevent theft from happening.
机器人操作系统ROS首先通过map的消息格式来定义地图的原点和地图长宽等相关信息,再将自行填充的map数据进行数据发布;通过mappub实现地图数据初始化填充和地图数据发布,其初始化主要包括地图原点、长度、宽度及各点的状态值,再通过创建发布者,并在map上发布地图数据;通过TF从外部接收消息,并确定base_link与map的坐标变换关系,通过tfbrd来发布坐标变换关系,创建类用于控制建图。对其进行初始化发布者并创建激光雷达接收数据,利用bresenham算法存储激光雷达扫描过的地图栅格点。The robot operating system ROS first defines the origin of the map, the length and width of the map and other related information through the message format of the map, and then publishes the self-filled map data; realizes the initial filling and release of map data through mappub, and its initialization mainly includes Map origin, length, width, and state values of each point, and then create a publisher, and publish map data on the map; receive messages from the outside through TF, and determine the coordinate transformation relationship between base_link and map, and publish coordinate transformation through tfbrd Relationships, create classes for controlling mapping. Initialize the publisher and create the lidar receiving data, and use the Bresenham algorithm to store the map grid points scanned by the lidar.
根据本发明实施例,所述SLAM地图模型通过激光雷达采集信息建立,包括:According to an embodiment of the present invention, the SLAM map model is established by collecting information from lidar, including:
S202,获取激光雷达采集信息;S202, acquiring laser radar collection information;
S204,根据第二预设方法对所述采集信息进行分析计算,得到目标物体的距离信息;S204. Analyze and calculate the collected information according to a second preset method to obtain distance information of the target object;
S206,将所述目标物体的距离信息进行整合得到地图数据信息;S206, integrating the distance information of the target object to obtain map data information;
S208,根据坐标变换关系对所述地图数据信息处理,建立SLAM地图模型。S208. Process the map data information according to the coordinate transformation relationship to establish a SLAM map model.
需要说明的是,所述第二预设方法为三角测距方法,仓库巡逻机器人巡逻地图是基于激光雷达来建立SLAM地图的。在激光雷达所采集的信息的基础上机器人定位导航,通过发送指令控制机器人电机驱动,通过激光雷达360°发射激光并接收激光信息,通过发射器发射激光束并接收目标反射的激光束来对目标进行测量距离的,并利用三角测距的原理,推算出目标或被测物体的距离并生成平面点云地图信息,进而建立巡逻地图传递给上位机,通过上位机来发布地图信息。It should be noted that the second preset method is a triangular ranging method, and the patrol map of the warehouse patrol robot is based on the lidar to establish the SLAM map. Based on the information collected by the laser radar, the robot locates and navigates, controls the motor drive of the robot by sending instructions, emits laser light through the laser radar 360° and receives laser information, emits laser beams through the transmitter and receives laser beams reflected by the target to target the target To measure the distance, and use the principle of triangular distance measurement, calculate the distance of the target or the measured object and generate plane point cloud map information, and then establish a patrol map and transmit it to the host computer, and release the map information through the host computer.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
S302,获取检测图像信息;S302, acquiring detection image information;
S304,将所述检测图像信息与预设背景图片或视频进行对比,得到检测物体影子图像信息;S304, comparing the detected image information with a preset background image or video to obtain shadow image information of the detected object;
S306,根据所述检测物体影子图像信息进行分析,得到所述检测外来物体信息;S306. Perform analysis according to the shadow image information of the detected object to obtain the detected foreign object information;
S308,根据所述检测外来物体信息进行分析,若所述检测物体异常,则将预警信息发送至警报装置,以进行预警。S308, analyze according to the detected foreign object information, and if the detected object is abnormal, send early warning information to an alarm device for early warning.
需要说明的是,巡逻机器人摄像头检测异常情况通过差影法,先对某一场景进行学习,再将所学习到的场景保存为图片或者视频,当有外来物体进入到机器人所保存的场景下时,将机器人所保存的场景与外来物体所产生的场景进行场景抵消.最后产生此外来物体的影子图像,以达到机器人对外来物体的检测。It should be noted that the camera of the patrol robot detects abnormal situations through the difference image method, first learns a certain scene, and then saves the learned scene as a picture or video, when a foreign object enters the scene saved by the robot , to offset the scene saved by the robot with the scene generated by the foreign object. Finally, the shadow image of the foreign object is generated to achieve the detection of the foreign object by the robot.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取检测人体图像信息;Obtain and detect human body image information;
根据所述检测人体图像信息进行分析,得到所述检测人体的骨骼点信息;将所述所述检测人体的骨骼点信息与保存的人体骨骼点信息进行对比,若二者相同则不进行处理;若二者不同,则发送预警信息并对所述检测人员进行跟随。Analyzing according to the image information of the detected human body to obtain the skeleton point information of the detected human body; comparing the skeleton point information of the detected human body with the saved human skeleton point information, and not processing if the two are the same; If the two are different, an early warning message is sent and the detection personnel are followed.
需要说明的是,巡逻机器人深度相机通过扫描将人体信息进行保存后,再次进行扫描后对其阈值进行对比以达到检测的效果。通过机器人的跟随节点,编写launch文件,当打开launch文件时出现图像,当人物进入时做出动作后,深度图像上则会有15个骨骼点,构成人的骨骼特征是目标到机器人实际距离与默认距离的差值,其反映机器人应该运动的距离与方向。通过机器人扫描的人体信息与保存的人体信息不同时,则机器人对其进行跟随报警提示。It should be noted that after the patrol robot depth camera scans and saves the human body information, it scans again and compares its threshold to achieve the detection effect. Write the launch file through the following node of the robot. When the launch file is opened, an image will appear. When the character enters and makes an action, there will be 15 bone points on the depth image. The bone features that constitute a person are the actual distance from the target to the robot and The default distance difference, which reflects the distance and direction the robot should move. When the human body information scanned by the robot is different from the saved human body information, the robot will follow and alarm it.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取传感器检测数据;Obtain sensor detection data;
根据所述传感器检测数据进行分析,若所述检测数据处于预设阈值区间,则不进行处理;Analyzing according to the sensor detection data, if the detection data is in the preset threshold range, no processing is performed;
若所述检测数据不处于预设阈值区间,则发送预警信息至服务器。If the detection data is not in the preset threshold range, then send early warning information to the server.
需要说明的是,所述仓库巡逻机器人共携带四种传感器设备,分别为超声波传感器、碰撞防跌传感器、烟雾传感器和温湿度传感器。其中,①超声波传感器:仓库巡逻机器人在移动底盘上装有三组超声波传感器;②碰撞防跌传感器:由碰撞机械传感器和红外灯防跌传感器组合在一块构建而成的,其主要是起到使机器人在运动过程中达到一个辅助避障的作用,防止机器人在走到路坑时发生跌倒的情况。③烟雾传感器:对于机器人在发现火灾时起着检测与防范的作用并对烟雾浓度进行检测;④温湿度传感器:对仓库内环境进行温度检测,检测温度的同时将相关数据上传到上位机与监控界面;摄像头获取图像信息等。智能机器人通过烟雾报警器来对机器人场景中的火灾进行检测,并结合红外传感器、碰撞传感器来判断火情,以达到多传感器融合巡逻的效果,进而实现仓库巡逻机器人巡逻和巡视的功能。It should be noted that the warehouse patrol robot carries a total of four sensor devices, namely an ultrasonic sensor, a collision prevention sensor, a smoke sensor, and a temperature and humidity sensor. Among them, ①ultrasonic sensor: the warehouse patrol robot is equipped with three sets of ultrasonic sensors on the mobile chassis; During the movement, it achieves an auxiliary obstacle avoidance function to prevent the robot from falling when it walks to the road pit. ③Smoke sensor: It plays the role of detection and prevention for the robot when it finds a fire and detects the smoke concentration; ④Temperature and humidity sensor: It detects the temperature of the environment in the warehouse, and uploads relevant data to the host computer and monitors the temperature while detecting the temperature interface; the camera obtains image information, etc. The intelligent robot detects the fire in the robot scene through the smoke alarm, and combines the infrared sensor and the collision sensor to judge the fire situation, so as to achieve the effect of multi-sensor fusion patrol, and then realize the function of warehouse patrol robot patrol and inspection.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
所述巡逻机器人操作系统为ROS机器人操作系统。The patrol robot operating system is a ROS robot operating system.
需要说明的是,ROS(robot operating system)机器人操作系统是通信机制、工具软件包、机器人技能和机器人生态系统的集合体,ROS Master是ROS的调度中枢。在仓库巡逻机器人软件中通过装有的Ubuntu系统来连接巡逻机器人,同时在监控操作层获取机器人的相关信息。It should be noted that ROS (robot operating system) robot operating system is a collection of communication mechanisms, tool software packages, robot skills and robot ecosystems, and ROS Master is the scheduling center of ROS. In the warehouse patrol robot software, the patrol robot is connected through the installed Ubuntu system, and at the same time, the relevant information of the robot is obtained at the monitoring operation layer.
图4示出了本发明一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻系统的框图。Fig. 4 shows a block diagram of a patrol system of a power material warehouse patrol robot based on the ROS system and SLAM of the present invention.
如图4所示,本发明第二方面提供了一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻系统4,包括存储器41和处理器42,所述存储器中包括基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序,所述基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序被所述处理器执行时实现如下步骤:As shown in Figure 4, the second aspect of the present invention provides a patrol system 4 of a power material warehouse patrol robot based on the ROS system and SLAM, including a memory 41 and a processor 42, including a memory based on the ROS system and SLAM The patrol method program of the power material warehouse patrol robot of construction, the patrol method program of the power material warehouse patrol robot built based on the ROS system and SLAM realizes the following steps when executed by the processor:
获取外部数据信息和SLAM地图模型;Obtain external data information and SLAM map model;
根据所述TF坐标数据和SLAM地图模型进行分析,得到巡逻机器人巡逻路线;Analyze according to the TF coordinate data and the SLAM map model, obtain the patrol route of the patrol robot;
将所述巡逻机器人巡逻路线发送至预设终端;Send the patrol route of the patrol robot to a preset terminal;
获取检测数据信息;Obtain detection data information;
将所述检测数据信息与预设阈值区间进行对比,若所述检测数据信息不处于预设阈值区间,则将预警信息发送至警报装置。The detection data information is compared with a preset threshold interval, and if the detection data information is not in the preset threshold interval, early warning information is sent to an alarm device.
根据本发明实施例,通过传感器获取外部数据,通过监控界面,使巡逻机器人按既定线路巡逻;通过激光雷达数据建立地图信息。巡逻机器人通过已保存的地图信息实现最优路径规划、自主导航、自主定位的功能,最终完成仓库巡逻机器人的巡逻监控。利用TF坐标变换,就是ROS软件包需要机器人发布TF(target frame)变换树实现不同坐标系之间的平移与旋转;以及激光雷达数据进行SLAM(Simultaneous Localization And Mapping)也称同步定位与地图构建,机器人从未知环境的未知地点运动,通过运动过程观测地图目标、特征定位、自身位置和姿态。通过机器人操作系统ROS的可视化工具Rviz便可看到地图信息。机器人巡逻采用A*算法进行全局路径规划和局部路径规划来实现最优路径的选择,使机器人可以更加高效地完成相关功能。其中,所述预设终端为仓库巡逻机器人控制终端。According to the embodiment of the present invention, the external data is obtained through the sensor, and the patrol robot is patrolled according to the predetermined route through the monitoring interface; the map information is established through the laser radar data. The patrol robot realizes the functions of optimal path planning, autonomous navigation, and autonomous positioning through the saved map information, and finally completes the patrol monitoring of the warehouse patrol robot. Using TF coordinate transformation means that the ROS software package requires the robot to issue a TF (target frame) transformation tree to achieve translation and rotation between different coordinate systems; and SLAM (Simultaneous Localization And Mapping) on lidar data, also known as synchronous positioning and map construction, The robot moves from an unknown location in an unknown environment, and observes map targets, feature positioning, its own position and posture through the movement process. The map information can be seen through the visualization tool Rviz of the robot operating system ROS. The robot patrol uses the A* algorithm for global path planning and local path planning to realize the selection of the optimal path, so that the robot can complete related functions more efficiently. Wherein, the preset terminal is a warehouse patrol robot control terminal.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取外部数据信息;Obtain external data information;
通过第一预设方法对所述外部数据信息进行变换,得到坐标变换关系。The external data information is transformed by a first preset method to obtain a coordinate transformation relationship.
需要说明的是,所述第一预设方法为TF坐标变换方法,仓库巡逻机器人所采用的深度相机为奥比中光Orbbec Astra Pro深度相机,对仓库物品的温度、人员温度测量起着重要作用,同时机器人可通过深度相机扫描对人员信息进行存储,当外来人员入侵时对其进行扫描并与库中人员信息进行对比,以防范盗窃等情况的发生。It should be noted that the first preset method is the TF coordinate transformation method, and the depth camera used by the warehouse patrol robot is the Orbbec Astra Pro depth camera, which plays an important role in the temperature measurement of warehouse items and personnel , At the same time, the robot can store personnel information through deep camera scanning, and scan it when outsiders invade and compare it with the personnel information in the library to prevent theft from happening.
机器人操作系统ROS首先通过map的消息格式来定义地图的原点和地图长宽等相关信息,再将自行填充的map数据进行数据发布;通过mappub实现地图数据初始化填充和地图数据发布,其初始化主要包括地图原点、长度、宽度及各点的状态值,再通过创建发布者,并在map上发布地图数据;通过TF从外部接收消息,并确定base_link与map的坐标变换关系,通过tfbrd来发布坐标变换关系,创建类用于控制建图。对其进行初始化发布者并创建激光雷达接收数据,利用bresenham算法存储激光雷达扫描过的地图栅格点。The robot operating system ROS first defines the origin of the map, the length and width of the map and other related information through the message format of the map, and then publishes the self-filled map data; realizes the initial filling and release of map data through mappub, and its initialization mainly includes Map origin, length, width, and state values of each point, and then create a publisher, and publish map data on the map; receive messages from the outside through TF, and determine the coordinate transformation relationship between base_link and map, and publish coordinate transformation through tfbrd Relationships, create classes for controlling mapping. Initialize the publisher and create the lidar receiving data, and use the Bresenham algorithm to store the map grid points scanned by the lidar.
根据本发明实施例,所述SLAM地图模型通过激光雷达采集信息建立,包括:According to an embodiment of the present invention, the SLAM map model is established by collecting information from lidar, including:
获取激光雷达采集信息;Obtain lidar collection information;
根据第二预设方法对所述采集信息进行分析计算,得到目标物体的距离信息;Analyzing and calculating the collected information according to a second preset method to obtain distance information of the target object;
将所述目标物体的距离信息进行整合得到地图数据信息;Integrating the distance information of the target object to obtain map data information;
根据坐标变换关系对所述地图数据信息处理,建立SLAM地图模型。The map data information is processed according to the coordinate transformation relationship to establish a SLAM map model.
需要说明的是,所述第二预设方法为三角测距方法,仓库巡逻机器人巡逻地图是基于激光雷达来建立SLAM地图的。在激光雷达所采集的信息的基础上机器人定位导航,通过发送指令控制机器人电机驱动,通过激光雷达360°发射激光并接收激光信息,通过发射器发射激光束并接收目标反射的激光束来对目标进行测量距离的,并利用三角测距的原理,推算出目标或被测物体的距离并生成平面点云地图信息,进而建立巡逻地图传递给上位机,通过上位机来发布地图信息。It should be noted that the second preset method is a triangular ranging method, and the patrol map of the warehouse patrol robot is based on the lidar to establish the SLAM map. Based on the information collected by the laser radar, the robot locates and navigates, controls the motor drive of the robot by sending instructions, emits laser light through the laser radar 360° and receives laser information, emits laser beams through the transmitter and receives laser beams reflected by the target to target the target To measure the distance, and use the principle of triangular distance measurement, calculate the distance of the target or the measured object and generate plane point cloud map information, and then establish a patrol map and transmit it to the host computer, and release the map information through the host computer.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取检测图像信息;Obtain detection image information;
将所述检测图像信息与预设背景图片或视频进行对比,得到检测物体影子图像信息;Comparing the detected image information with a preset background image or video to obtain shadow image information of the detected object;
根据所述检测物体影子图像信息进行分析,得到所述检测外来物体信息;analyzing according to the shadow image information of the detected object to obtain the detected foreign object information;
根据所述检测外来物体信息进行分析,若所述检测物体异常,则将预警信息发送至警报装置,以进行预警。Analysis is performed according to the detected foreign object information, and if the detected object is abnormal, early warning information is sent to an alarm device for early warning.
需要说明的是,巡逻机器人摄像头检测异常情况通过差影法,先对某一场景进行学习,再将所学习到的场景保存为图片或者视频,当有外来物体进入到机器人所保存的场景下时,将机器人所保存的场景与外来物体所产生的场景进行场景抵消.最后产生此外来物体的影子图像,以达到机器人对外来物体的检测。It should be noted that the camera of the patrol robot detects abnormal situations through the difference image method, first learns a certain scene, and then saves the learned scene as a picture or video, when a foreign object enters the scene saved by the robot , to offset the scene saved by the robot with the scene generated by the foreign object. Finally, the shadow image of the foreign object is generated to achieve the detection of the foreign object by the robot.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取检测人体图像信息;Obtain and detect human body image information;
根据所述检测人体图像信息进行分析,得到所述检测人体的骨骼点信息;analyzing according to the image information of the detected human body to obtain the bone point information of the detected human body;
将所述所述检测人体的骨骼点信息与保存的人体骨骼点信息进行对比,若二者相同则不进行处理;若二者不同,则发送预警信息并对所述检测人员进行跟随。Comparing the skeleton point information of the detected human body with the saved human skeleton point information, if the two are the same, no processing is performed; if the two are different, an early warning message is sent and the detection personnel are followed.
需要说明的是,巡逻机器人深度相机通过扫描将人体信息进行保存后,再次进行扫描后对其阈值进行对比以达到检测的效果。通过机器人的跟随节点,编写launch文件,当打开launch文件时出现图像,当人物进入时做出动作后,深度图像上则会有15个骨骼点,构成人的骨骼特征是目标到机器人实际距离与默认距离的差值,其反映机器人应该运动的距离与方向。通过机器人扫描的人体信息与保存的人体信息不同时,则机器人对其进行跟随报警提示。It should be noted that after the patrol robot depth camera scans and saves the human body information, it scans again and compares its threshold to achieve the detection effect. Write the launch file through the following node of the robot. When the launch file is opened, an image will appear. When the character enters and makes an action, there will be 15 bone points on the depth image. The bone features that constitute a person are the actual distance from the target to the robot and The default distance difference, which reflects the distance and direction the robot should move. When the human body information scanned by the robot is different from the saved human body information, the robot will follow and alarm it.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
获取传感器检测数据;Obtain sensor detection data;
根据所述传感器检测数据进行分析,若所述检测数据处于预设阈值区间,则不进行处理;Analyzing according to the sensor detection data, if the detection data is in the preset threshold range, no processing is performed;
若所述检测数据不处于预设阈值区间,则发送预警信息至服务器。If the detection data is not in the preset threshold range, then send early warning information to the server.
需要说明的是,所述仓库巡逻机器人共携带四种传感器设备,分别为超声波传感器、碰撞防跌传感器、烟雾传感器和温湿度传感器。其中,①超声波传感器:仓库巡逻机器人在移动底盘上装有三组超声波传感器;②碰撞防跌传感器:由碰撞机械传感器和红外灯防跌传感器组合在一块构建而成的,其主要是起到使机器人在运动过程中达到一个辅助避障的作用,防止机器人在走到路坑时发生跌倒的情况。③烟雾传感器:对于机器人在发现火灾时起着检测与防范的作用并对烟雾浓度进行检测;④温湿度传感器:对仓库内环境进行温度检测,检测温度的同时将相关数据上传到上位机与监控界面;摄像头获取图像信息等。智能机器人通过烟雾报警器来对机器人场景中的火灾进行检测,并结合红外传感器、碰撞传感器来判断火情,以达到多传感器融合巡逻的效果,进而实现仓库巡逻机器人巡逻和巡视的功能。It should be noted that the warehouse patrol robot carries a total of four sensor devices, namely an ultrasonic sensor, a collision prevention sensor, a smoke sensor, and a temperature and humidity sensor. Among them, ①ultrasonic sensor: the warehouse patrol robot is equipped with three sets of ultrasonic sensors on the mobile chassis; During the movement, it achieves an auxiliary obstacle avoidance function to prevent the robot from falling when it walks to the road pit. ③Smoke sensor: It plays the role of detection and prevention for the robot when it finds a fire and detects the smoke concentration; ④Temperature and humidity sensor: It detects the temperature of the environment in the warehouse, and uploads relevant data to the host computer and monitors the temperature while detecting the temperature interface; the camera obtains image information, etc. The intelligent robot detects the fire in the robot scene through the smoke alarm, and combines the infrared sensor and the collision sensor to judge the fire situation, so as to achieve the effect of multi-sensor fusion patrol, and then realize the function of warehouse patrol robot patrol and inspection.
根据本发明实施例,还包括:According to an embodiment of the present invention, it also includes:
所述巡逻机器人操作系统为ROS机器人操作系统。The patrol robot operating system is a ROS robot operating system.
需要说明的是,ROS(robot operating system)机器人操作系统是通信机制、工具软件包、机器人技能和机器人生态系统的集合体,ROS Master是ROS的调度中枢。在仓库巡逻机器人软件中通过装有的Ubuntu系统来连接巡逻机器人,同时在监控操作层获取机器人的相关信息。It should be noted that ROS (robot operating system) robot operating system is a collection of communication mechanisms, tool software packages, robot skills and robot ecosystems, and ROS Master is the scheduling center of ROS. In the warehouse patrol robot software, the patrol robot is connected through the installed Ubuntu system, and at the same time, the relevant information of the robot is obtained at the monitoring operation layer.
本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序,所述一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法程序被处理器执行时,实现如上述任一项所述的一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法的步骤。The third aspect of the present invention provides a computer-readable storage medium, the computer-readable storage medium includes a patrol method program based on the ROS system and SLAM for the patrol robot of the power material warehouse, and the one based on the ROS system When the patrol method program of the power material warehouse patrol robot built with SLAM is executed by the processor, the steps of the patrol method of a power material warehouse patrol robot built based on the ROS system and SLAM as described in any one of the above are realized.
本发明公开的一种基于ROS系统和SLAM构建的电力物资仓库巡逻机器人的巡逻方法、系统和可读存储介质,通过传感器获取外部数据,通过监控界面,使巡逻机器人按既定线路巡逻;通过激光雷达数据建立地图信息。巡逻机器人通过已保存的地图信息实现最优路径规划、自主导航、自主定位的功能,最终完成仓库巡逻机器人的巡逻监控。另外,本申请还通过摄像头对外界环境的特定位置进行拍摄后与在原有库中的信息进行对比来初步实现监控、巡逻及报警的目的。The invention discloses a patrol method, system and readable storage medium of a power material warehouse patrol robot based on ROS system and SLAM, which acquires external data through a sensor, and makes the patrol robot patrol according to a predetermined route through a monitoring interface; through laser radar Data build map information. The patrol robot realizes the functions of optimal path planning, autonomous navigation, and autonomous positioning through the saved map information, and finally completes the patrol monitoring of the warehouse patrol robot. In addition, this application also preliminarily realizes the purpose of monitoring, patrolling and alarming by comparing the information in the original database with the information in the original database after the camera shoots a specific location of the external environment.
在本申请所提供的几个实施例中,应该理解到,所揭露的设备和方法,可以通过其它的方式实现。以上所描述的设备实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个单元或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的各组成部分相互之间的耦合、或直接耦合、或通信连接可以是通过一些接口,设备或单元的间接耦合或通信连接,可以是电性的、机械的或其它形式的。In the several embodiments provided in this application, it should be understood that the disclosed devices and methods may be implemented in other ways. The device embodiments described above are only illustrative. For example, the division of the units is only a logical function division. In actual implementation, there may be other division methods, such as: multiple units or components can be combined, or May be integrated into another system, or some features may be ignored, or not implemented. In addition, the coupling, or direct coupling, or communication connection between the components shown or discussed may be through some interfaces, and the indirect coupling or communication connection of devices or units may be electrical, mechanical or other forms of.
上述作为分离部件说明的单元可以是、或也可以不是物理上分开的,作为单元显示的部件可以是、或也可以不是物理单元;既可以位于一个地方,也可以分布到多个网络单元上;可以根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。The units described above as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units; they may be located in one place or distributed to multiple network units; Part or all of the units can be selected according to actual needs to achieve the purpose of the solution of this embodiment.
另外,在本发明各实施例中的各功能单元可以全部集成在一个处理单元中,也可以是各单元分别单独作为一个单元,也可以两个或两个以上单元集成在一个单元中;上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。In addition, each functional unit in each embodiment of the present invention can be integrated into one processing unit, or each unit can be used as a single unit, or two or more units can be integrated into one unit; the above-mentioned integration The unit can be realized in the form of hardware or in the form of hardware plus software functional unit.
本领域普通技术人员可以理解:实现上述方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成,前述的程序可以存储于计算机可读取存储介质中,该程序在执行时,执行包括上述方法实施例的步骤;而前述的存储介质包括:移动存储设备、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、磁碟或者光盘等各种可以存储程序代码的介质。Those of ordinary skill in the art can understand that all or part of the steps to realize the above method embodiments can be completed by hardware related to program instructions, and the aforementioned programs can be stored in computer-readable storage media. When the program is executed, the execution includes The steps of the foregoing method embodiment; and the foregoing storage medium includes: various possible storage devices such as removable storage devices, read-only memory (ROM, Read-Only Memory), random access memory (RAM, Random Access Memory), magnetic disks or optical disks, etc. A medium that stores program code.
或者,本发明上述集成的单元如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实施例的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机、服务器、或者网络设备等)执行本发明各个实施例所述方法的全部或部分。而前述的存储介质包括:移动存储设备、ROM、RAM、磁碟或者光盘等各种可以存储程序代码的介质。Alternatively, if the above-mentioned integrated units of the present invention are implemented in the form of software function modules and sold or used as independent products, they can also be stored in a computer-readable storage medium. Based on this understanding, the technical solution of the embodiment of the present invention is essentially or the part that contributes to the prior art can be embodied in the form of a software product. The computer software product is stored in a storage medium and includes several instructions for Make a computer device (which may be a personal computer, a server, or a network device, etc.) execute all or part of the methods described in various embodiments of the present invention. The aforementioned storage medium includes: various media capable of storing program codes such as removable storage devices, ROM, RAM, magnetic disks or optical disks.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211187860.1ACN115585809A (en) | 2022-09-28 | 2022-09-28 | Patrol method and system for warehouse patrol robot and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211187860.1ACN115585809A (en) | 2022-09-28 | 2022-09-28 | Patrol method and system for warehouse patrol robot and readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115585809Atrue CN115585809A (en) | 2023-01-10 |
Family
ID=84773301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211187860.1APendingCN115585809A (en) | 2022-09-28 | 2022-09-28 | Patrol method and system for warehouse patrol robot and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115585809A (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106598052A (en)* | 2016-12-14 | 2017-04-26 | 南京阿凡达机器人科技有限公司 | Robot security inspection method based on environment map and robot thereof |
| CN114527763A (en)* | 2022-02-28 | 2022-05-24 | 合肥工业大学 | Intelligent inspection system and method based on target detection and SLAM composition |
| CN114625121A (en)* | 2022-01-24 | 2022-06-14 | 成都理工大学 | Autonomous inspection exploration trolley system based on multi-sensor fusion and navigation method |
- 2022
- 2022-09-28CNCN202211187860.1Apatent/CN115585809A/enactivePending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106598052A (en)* | 2016-12-14 | 2017-04-26 | 南京阿凡达机器人科技有限公司 | Robot security inspection method based on environment map and robot thereof |
| CN114625121A (en)* | 2022-01-24 | 2022-06-14 | 成都理工大学 | Autonomous inspection exploration trolley system based on multi-sensor fusion and navigation method |
| CN114527763A (en)* | 2022-02-28 | 2022-05-24 | 合肥工业大学 | Intelligent inspection system and method based on target detection and SLAM composition |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12045056B2 (en) | Information processing apparatus, information processing method, and medium | |
| US11016493B2 (en) | Planning robot stopping points to avoid collisions | |
| Mishra et al. | ROS based service robot platform | |
| EP3612906B1 (en) | Method and system for environment map generation and alignment | |
| US10328578B2 (en) | Methods and systems for detecting, recognizing, and localizing pallets | |
| US11675329B2 (en) | Functional safety system using three dimensional sensing and dynamic digital twin | |
| CN109276833A (en) | A kind of robot patrol fire-fighting system and its control method based on ROS | |
| US20220019949A1 (en) | Safety management assistance system, and control program | |
| JP2022548009A (en) | object movement system | |
| Kamarudin et al. | Improving performance of 2D SLAM methods by complementing Kinect with laser scanner | |
| CN119860779A (en) | Intelligent inspection method, control device, system and storage medium for wheeled robot | |
| CN120069259A (en) | Theatre performance stage equipment safety regulation control system | |
| Boeing et al. | WAMbot: Team MAGICian's entry to the Multi Autonomous Ground‐robotic International Challenge 2010 | |
| CN118819140A (en) | Lifting mechanism control method, system and electronic equipment for AMR mobile robot | |
| CN115585809A (en) | Patrol method and system for warehouse patrol robot and readable storage medium | |
| CN115565058A (en) | Robot, obstacle avoidance method, device and storage medium | |
| CN112797986A (en) | Intelligent logistics robot positioning system and method based on unmanned autonomous technology | |
| US20230324922A1 (en) | Autonomous Robotic Platform | |
| Vijayasundara et al. | Security Robot for Real-time Monitoring and Capturing | |
| He et al. | Master-Slave Heterogeneous Surveillance System Oriented to High-Speed Railway Lines Security | |
| Chen et al. | Mobile asset tracking for dynamic 3D crane workspace generation in real time | |
| US20240053758A1 (en) | Self-moving robot and method of automatically determining an accessible region thereof | |
| Bracci | Autonomous obstacle avoidance and control using voxel segmentation of 3D LiDAR data | |
| Milella et al. | Active surveillance of dynamic environments using a multi-agent system | |
| Siemiątkowska et al. | The application of mobile robots for building safety control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | ||
| CB02 | Change of applicant information | Country or region after:China Address after:Room 86, room 406, No.1, Yichuang street, Zhongxin Guangzhou Knowledge City, Huangpu District, Guangzhou City, Guangdong Province Applicant after:Southern Power Grid Digital Grid Research Institute Co.,Ltd. Address before:Room 406-86, No.1 Yichuang Street, Zhongxin Guangzhou Knowledge City, Huangpu District, Guangzhou City, Guangdong Province Applicant before:Southern Power Grid Digital Grid Research Institute Co.,Ltd. Country or region before:China |