CN115535233A - A flying catamaran unmanned sailing ship - Google Patents
A flying catamaran unmanned sailing shipDownload PDFInfo
- Publication number
- CN115535233A CN115535233ACN202211184617.4ACN202211184617ACN115535233ACN 115535233 ACN115535233 ACN 115535233ACN 202211184617 ACN202211184617 ACN 202211184617ACN 115535233 ACN115535233 ACN 115535233A
- Authority
- CN
- China
- Prior art keywords
- unmanned
- hull
- sailboat
- flying
- steering gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 229920000049Carbon (fiber)Polymers0.000claimsabstractdescription26
- 239000004917carbon fiberSubstances0.000claimsabstractdescription26
- VNWKTOKETHGBQD-UHFFFAOYSA-NmethaneChemical compoundCVNWKTOKETHGBQD-UHFFFAOYSA-N0.000claimsabstractdescription26
- XLYOFNOQVPJJNP-UHFFFAOYSA-NwaterSubstancesOXLYOFNOQVPJJNP-UHFFFAOYSA-N0.000claimsabstractdescription15
- 239000010409thin filmSubstances0.000claimsabstractdescription7
- 238000010248power generationMethods0.000claimsabstractdescription6
- 230000007613environmental effectEffects0.000claimsabstractdescription4
- 239000002184metalSubstances0.000claimsdescription18
- 238000006243chemical reactionMethods0.000claimsdescription10
- 238000012545processingMethods0.000claimsdescription5
- 239000004698PolyethyleneSubstances0.000claimsdescription3
- 238000004364calculation methodMethods0.000claimsdescription3
- 238000001514detection methodMethods0.000claimsdescription3
- 230000005611electricityEffects0.000claimsdescription3
- 239000006260foamSubstances0.000claimsdescription3
- -1polyethylenePolymers0.000claimsdescription3
- 229920000573polyethylenePolymers0.000claimsdescription3
- 239000006261foam materialSubstances0.000abstract1
- 238000011160researchMethods0.000description11
- 230000007774longtermEffects0.000description4
- 238000013480data collectionMethods0.000description3
- 238000005457optimizationMethods0.000description3
- 238000004422calculation algorithmMethods0.000description2
- 238000013461designMethods0.000description2
- 238000005516engineering processMethods0.000description2
- 230000010365information processingEffects0.000description2
- 238000000034methodMethods0.000description2
- 230000009286beneficial effectEffects0.000description1
- 230000005540biological transmissionEffects0.000description1
- 238000011217control strategyMethods0.000description1
- 238000001816coolingMethods0.000description1
- 238000010586diagramMethods0.000description1
- 230000009977dual effectEffects0.000description1
- 230000000694effectsEffects0.000description1
- 238000002474experimental methodMethods0.000description1
- 230000002068genetic effectEffects0.000description1
- 230000007246mechanismEffects0.000description1
- 238000002844meltingMethods0.000description1
- 230000008018meltingEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000008569processEffects0.000description1
- 238000005086pumpingMethods0.000description1
- 238000004088simulationMethods0.000description1
- 230000007704transitionEffects0.000description1
Images



Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C35/00—Flying-boats; Seaplanes
- B64C35/008—Amphibious sea planes
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H9/00—Marine propulsion provided directly by wind power
- B63H9/04—Marine propulsion provided directly by wind power using sails or like wind-catching surfaces
- B63H9/06—Types of sail; Constructional features of sails; Arrangements thereof on vessels
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C35/00—Flying-boats; Seaplanes
- B64C35/005—Flying-boats; Seaplanes with propellers, rudders or brakes acting in the water
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/24—Aircraft characterised by the type or position of power plants using steam or spring force
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Toys (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明属于无人帆船技术领域,具体地说,是一种可飞行双体无人帆船。The invention belongs to the technical field of unmanned sailing ships, in particular to a flying catamaran unmanned sailing ship.
背景技术Background technique
无人帆船是以太阳能、风能等可再生能源作为系统控制的动力来源,可以胜任生态环境观测、信息传输、违法活动探查等任务,且其可以长时间进行远海作业。目前对于无人帆船的研究主要有德蒙福特大学(De Montfort University),其研究重点在于无人帆船导航和路径规划算法的研究。还有苏黎世联邦理工学院(Swiss Federal Institute ofTechnology Zurich)的团队,其研究重点在于无人帆船的建模和仿真。还有美国Saildrone公司,2012年推出了无人帆船。船上安装有翼帆和太阳能电池板,船长7m,总高7.5m(水面以上部分高5m),满载质量545kg,载荷能力100kg,搭载了最大功率10W的太阳能电池板和气象站、CTD等传感器,航速可达3~5kn,续航力6~12个月。Saildrone USV作为美国北极探索创新技术(Innovative Technology for Arctic Exploration,ITAE)项目中关键平台之一,于2015年在白令海执行了观测任务,为分析海冰融化对海面降温的影响提供了数据。目前Saildrone已经在海上累计航行了111万km。后期计划生产1000艘无人帆船,打造一个6°×6°分辨率覆盖全球海洋的“量化星球”。Unmanned sailing ships use renewable energy such as solar energy and wind energy as the power source for system control. They can perform tasks such as ecological environment observation, information transmission, and detection of illegal activities, and they can operate in open seas for a long time. The current research on unmanned sailing ships mainly includes De Montfort University, whose research focuses on the research of unmanned sailing ship navigation and path planning algorithms. There is also a team at the Swiss Federal Institute of Technology Zurich whose research focuses on the modeling and simulation of unmanned sailing vessels. There is also the US company Saildrone, which launched an unmanned sailing ship in 2012. Wing sails and solar panels are installed on the ship. The length of the ship is 7m, the total height is 7.5m (the part above the water surface is 5m high), the full load weight is 545kg, and the load capacity is 100kg. It is equipped with solar panels with a maximum power of 10W, weather stations, CTD and other sensors. The speed can reach 3-5kn, and the endurance is 6-12 months. Saildrone USV, as one of the key platforms in the Innovative Technology for Arctic Exploration (ITAE) project of the United States, performed an observation mission in the Bering Sea in 2015, providing data for analyzing the impact of sea ice melting on sea surface cooling. Saildrone has sailed 1.11 million kilometers at sea so far. In the later stage, it is planned to produce 1,000 unmanned sailing ships to create a "quantified planet" covering the global ocean with a resolution of 6°×6°.
而国内相关的研究比较少,主要集中在研究所和大学。上海交通大学对无人船进行了多年研究,其在无人帆船领域的研究重点主要在帆船控制理论方面。中国科学院沈阳自动化研究所的科研团队对无人帆船在海洋观测时的航行机理、设计与优化等问题展开了研究,在2018年研发出了“海鸥”号。“海鸥”号重180kg,船体长3.5m,航速3km/s,以风力作为驱动,用太阳能为船体的控制系统和传感器供电,从而实现长时间海洋观测。2019年底,“海鸥”号在青岛完成了海上实验,其航向控制、位置保持、和路径跟踪等方面表现出了良好的控制能力。2022年5月,“海鸥”号使用增强的遗传算法(GA)求解器帮助速度预测程序(VPPs)快速收敛,同时基于邻域信息的优化(NIBO)策略加速和优化速度预测的过程,对不同设计的无人帆船进行仿真和试验,在设计和优化上取得了新的进展。However, there are relatively few related researches in China, mainly concentrated in research institutes and universities. Shanghai Jiaotong University has conducted research on unmanned ships for many years, and its research focus in the field of unmanned sailing ships is mainly on the theory of sailing control. The scientific research team of Shenyang Institute of Automation, Chinese Academy of Sciences conducted research on the navigation mechanism, design and optimization of unmanned sailing ships during ocean observation, and developed the "Seagull" in 2018. The "Seagull" weighs 180kg, has a hull length of 3.5m and a speed of 3km/s. It is driven by wind power and uses solar energy to power the control system and sensors of the hull, thereby realizing long-term ocean observation. At the end of 2019, the "Seagull" completed sea experiments in Qingdao, and its course control, position keeping, and path tracking have shown good control capabilities. In May 2022, the "Seagull" used the enhanced genetic algorithm (GA) solver to help the velocity prediction programs (VPPs) to converge quickly, and at the same time, the neighborhood information-based optimization (NIBO) strategy accelerated and optimized the process of velocity prediction. The designed unmanned sailboat has been simulated and tested, and new progress has been made in design and optimization.
无人帆船航行性能很大程度上取决于对风能的利用率,但是国内外对于无人帆船的控帆策略研究甚少,大多依据有人操帆的经验总结,难以满足无人帆船日益智能化的需要。The sailing performance of unmanned sailing ships largely depends on the utilization of wind energy. However, there are very few researches on sail control strategies for unmanned sailing ships at home and abroad. Most of them are based on the experience of manned sailing. need.
发明内容Contents of the invention
本发明的目的在于提供一种可飞行双体无人帆船,是一种具备空中飞行、水面航行两种方式的无人帆船系统,融合机器视觉,依靠太阳能和风能提供持续动力,绿色无污染,可实现长时间水面作业,并可进行自主规划路径巡航及自主避障,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。The purpose of the present invention is to provide a flying catamaran unmanned sailing ship, which is an unmanned sailing ship system with two modes of air flight and water surface navigation. It integrates machine vision and relies on solar energy and wind energy to provide continuous power. It is green and pollution-free. It can realize long-term surface operations, and can carry out autonomous planning path cruising and autonomous obstacle avoidance. It has broad application prospects in water body data collection, water surface patrols, and ocean exploration.
为实现上述目的,本发明采用以下技术方案:To achieve the above object, the present invention adopts the following technical solutions:
一种可飞行双体无人帆船,包括船体、两个U2820电机,以及分别与船体连接的两个船帆、两个1155螺旋桨、尾舵、中央机翼及尾翼,所述船体内部有密封舱,其内部放置太阳能转换模块、传感器、航行控制器、信号接收机和信息综合处理计算机;所述信号接收机接收遥控信号并把信号发送给航行控制器,以实现对无人帆船的远程遥控,所述航行控制器向两个U2820电机旁边的单向电调发送信号,单向电调驱动U2820电机旋转,实现该无人帆船的水面航行或空中飞行;所述信息综合处理计算机根据设定的使命及接收到的传感器的信息进行自主路径规划;所述太阳能转换模块存储中央机翼上的柔性薄膜太阳能发电板转换的电力,为无人帆船的控制系统和传感器供电。A flying catamaran unmanned sailboat, including a hull, two U2820 motors, two sails connected to the hull, two 1155 propellers, a tail rudder, a central wing and an empennage, and a sealed cabin inside the hull The solar energy conversion module, sensor, navigation controller, signal receiver and integrated information processing computer are placed inside it; the signal receiver receives the remote control signal and sends the signal to the navigation controller to realize the remote control of the unmanned sailing ship, The navigation controller sends a signal to the one-way ESC next to the two U2820 motors, and the one-way ESC drives the U2820 motor to rotate to realize the surface navigation or air flight of the unmanned sailboat; the information comprehensive processing computer according to the set The mission and the information received from the sensors are used for autonomous path planning; the solar energy conversion module stores the electricity converted by the flexible thin-film solar panels on the central wing to provide power for the control system and sensors of the unmanned sailing ship.
进一步地,所述船体为双船体结构,包括碳纤维甲板,甲板上有碳纤维盖板,以及提供浮力的聚乙烯泡沫船身;中央机翼通过碳纤维连接两个船体;两个尾舵与第二双轴舵机连接,舵机通过金属连接件与碳纤维管连接分别固定在船体的尾部,两个尾舵之间通过尾翼连接。Further, the hull is a double-hull structure, including a carbon fiber deck, a carbon fiber cover plate on the deck, and a polyethylene foam hull that provides buoyancy; the central wing connects the two hulls through carbon fiber; two tail rudders and the second double The shaft steering gear is connected, and the steering gear is respectively fixed at the tail of the hull through metal connectors and carbon fiber tubes, and the two tail rudders are connected through the tail fin.
进一步地,所述两个U2820电机通过T+L型金属连接件与碳纤维甲板固定;通过H型金属连接件对称分布于船体前部两侧的圆形预留孔洞中。Further, the two U2820 motors are fixed to the carbon fiber deck through T+L-shaped metal connectors; they are symmetrically distributed in circular reserved holes on both sides of the front of the hull through H-shaped metal connectors.
进一步地,所述H型金属连接件高8cm,在通过整体重量和浮力的计算下,尽可能使螺旋桨与船体在同一轴线上,防止螺旋桨打水影响推进效率或损坏推进器。Further, the H-shaped metal connector is 8cm high. Based on the calculation of the overall weight and buoyancy, the propeller and the hull should be on the same axis as possible to prevent the propeller from kicking water to affect the propulsion efficiency or damage the propeller.
进一步地,所述船帆由单轴舵机与双轴舵机提供两个自由度,对称分布于船体两侧的圆形预留孔洞中,并由金属结构件与碳纤维甲板相连。Further, the sails are provided with two degrees of freedom by a single-axis steering gear and a double-axis steering gear, symmetrically distributed in the circular reserved holes on both sides of the hull, and connected with the carbon fiber deck by a metal structure.
进一步地,在航行模式下,双轴舵机折叠至垂直状态,单轴舵机使船帆旋转一定的角度,从而推动无人帆船前进;在飞行模式下,双轴舵机使船帆旋转至水平状态,利用伯努利原理为无人帆船起飞提供升力。Furthermore, in sailing mode, the two-axis steering gear is folded to a vertical state, and the single-axis steering gear rotates the sail at a certain angle, thus pushing the unmanned sailing ship forward; in flight mode, the two-axis steering gear rotates the sail to In the horizontal state, Bernoulli's principle is used to provide lift for the unmanned sailboat to take off.
进一步地,所述尾舵通过第二双轴舵机与尾翼连接,其在遥控器控制下,配合船帆的驱动,使得无人帆船能够前行、转向。Further, the tail rudder is connected with the tail wing through the second two-axis steering gear, which is controlled by the remote controller and cooperates with the driving of the sails, so that the unmanned sailboat can move forward and turn.
进一步地,所述传感器包括双目摄像头、GPS接收机,双目摄像头镶嵌于船体头部,用于进行环境信息采集及目标检测与跟踪。Further, the sensor includes a binocular camera and a GPS receiver, and the binocular camera is embedded in the head of the hull for environmental information collection and target detection and tracking.
进一步地,所述GPS接收机位于船体前部,用于确定无人帆船的位置、航向和航速。Further, the GPS receiver is located at the front of the hull and is used to determine the position, heading and speed of the unmanned sailing ship.
进一步地,还包括一6S航模电池,其置于所述船体密封仓内,用于无人帆船飞行模式下供电。Further, it also includes a 6S model airplane battery, which is placed in the sealed compartment of the hull for power supply in the flight mode of the unmanned sailboat.
有益效果Beneficial effect
本发明是一种可飞行双体无人帆船,是一种具备飞行、航行两种方式的无人帆船系统,融合机器视觉,可实现长时间远距离作业,自主规划路径巡航,及时躲避障碍物,依靠太阳能和风能提供动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。The present invention is a flying catamaran unmanned sailing ship, an unmanned sailing ship system with two modes of flying and sailing, integrated with machine vision, can realize long-term long-distance operation, autonomously plan path cruise, and avoid obstacles in time , relying on solar and wind energy to provide power, green and pollution-free, and has broad application prospects in water body data collection, water surface patrol, ocean exploration, etc.
附图说明Description of drawings
图1为本发明空中飞行状态的轴测图;Fig. 1 is the axonometric view of air flight state of the present invention;
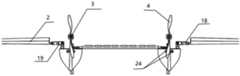
图2为本发明空中飞行状态的俯视图;Fig. 2 is the top view of the air flight state of the present invention;
图3为本发明空中飞行状态的前视图;Fig. 3 is the front view of the air flight state of the present invention;
图4为本发明内部结构示意图。Fig. 4 is a schematic diagram of the internal structure of the present invention.
图中:1为船体,2为船帆,3为推进电机,4为螺旋桨,5为尾舵,6为柔性薄膜太阳能发电板,7为中央机翼,8为尾翼,9为航行控制器,10为信号接收机,11为6S航模电池,12为GPS接收机,13为信息综合处理计算机,14为太阳能转换模块,15为单向电调,16为碳纤维盖板,17为碳纤维甲板,18为单轴舵机,19为双轴舵机,20为第二双轴舵机,21为T+L型金属连接件,22为碳纤维连接杆,23为H型金属连接件,24为双目摄像头。In the figure: 1 is the hull, 2 is the sail, 3 is the propulsion motor, 4 is the propeller, 5 is the tail rudder, 6 is the flexible thin-film solar power generation panel, 7 is the central wing, 8 is the empennage, and 9 is the navigation controller. 10 is a signal receiver, 11 is a 6S model airplane battery, 12 is a GPS receiver, 13 is an information comprehensive processing computer, 14 is a solar energy conversion module, 15 is a one-way ESC, 16 is a carbon fiber cover plate, 17 is a carbon fiber deck, 18 19 is a two-axis steering gear, 20 is a second two-axis steering gear, 21 is a T+L metal connector, 22 is a carbon fiber connecting rod, 23 is an H-shaped metal connector, and 24 is a binocular camera.
具体实施方式detailed description
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
如图1-4所示,本发明提供的一种可飞行双体无人帆船,包括:船体1,船帆2,推进电机3,螺旋桨4,尾舵5,柔性薄膜太阳能发电板6,中央机翼7,尾翼8,航行控制器9,信号接收机10,6S航模电池11,GPS接收机12,信息综合处理计算机13,太阳能转换模块14,单向电调15,碳纤维盖板16,碳纤维甲板17,轴舵机18,双轴舵机19,第二双轴舵机20,T+L型金属连接件21,碳纤维连接杆22,H型金属连接件23,双目摄像头24。As shown in Figures 1-4, a flying catamaran unmanned sailing ship provided by the present invention includes: a
本发明的实施例中,船体1内部放置的太阳能转换模块14存储中央机翼7上的柔性薄膜太阳能发电板6转换的电力,为无人帆船的控制系统和传感器供电。In the embodiment of the present invention, the
本发明的实施例中,航行控制器9向位于各推进电机3旁边的单向电调15发送信号,单向电调15驱动推进电机3旋转,实现该无人帆船在紧急情况下飞行,避开障碍物。In the embodiment of the present invention, the
本发明的实施例中,船体1为双船体结构,包括碳纤维甲板17,甲板上有碳纤维盖板16,可开舱放置控制系统相关部件,提供浮力的聚乙烯泡沫船身。In the embodiment of the present invention, the
本发明的实施例中,中央机翼7通过碳纤维连接两个船体,两个尾舵5与第二双轴舵机20连接,第二双轴舵机20通过金属连接件24与碳纤维连接杆22连接分别固定在船体的尾部,两个尾舵5之间通过尾翼8连接。In the embodiment of the present invention, the central wing 7 is connected to the two hulls through carbon fiber, and the two
本发明的实施例中,船帆2为两个,其由单轴舵机18与双轴舵机19提供两个自由度,对称分布于船体两侧的圆形预留孔洞中,并由H型金属结构件23与碳纤维甲板17相连。In the embodiment of the present invention, there are two
本发明的实施例中,在航行模式下,双轴舵机19折叠至垂直状态,单轴舵机18使船帆2旋转一定的角度,从而推动无人帆船前进。In the embodiment of the present invention, in the sailing mode, the two-
本发明的实施例中,在飞行模式下,双轴舵机19折叠至水平状态,利用伯努利原理为无人帆船起飞提供一定升力。In the embodiment of the present invention, in the flight mode, the two-
本发明的实施例中,尾舵5通过第二双轴舵机20与碳纤维连接杆22连接,其在遥控器控制下,配合船帆2的驱动,使得无人帆船能够前行、转向。In the embodiment of the present invention, the
本发明的实施例中,飞行推进电机3为两个,配套使用40A单向电调15与碳纤维螺旋桨4构成,通过H型金属连接件23对称分布于船体前部两侧的圆形预留孔洞中,并由H型金属结构件23与机身的框架结构相连。In the embodiment of the present invention, there are two
本发明的实施例中,H型金属连接件23高8cm,在通过整体重量和浮力的计算下,尽可能使螺旋桨4与船体1在同一轴线上,防止螺旋桨4打水的同时油门升力达到最大。In the embodiment of the present invention, the H-shaped
本发明的实施例中,双目摄像头24放镶嵌于船体头部,用于进行环境信息采集及目标检测与跟踪。In the embodiment of the present invention, the
本发明的实施例中,GPS接收机12位于船体前部,用于确定无人帆船的位置和速度。In an embodiment of the present invention, a
本发明的实施例中,所述6S航模电池11位于船体内部,用于帆船飞行模式下供电。In the embodiment of the present invention, the 6S
本发明的实施例中,太阳能转换模块14包括太阳能转换电能装置,其通过转换技术将柔性薄膜太阳能发电板6获取的能量转换为电能,为无人帆船的控制系统和传感器供电。In the embodiment of the present invention, the solar
本发明的实施例中,航行控制器9放置于船体前部的密封舱内,用于控制无人帆船的飞行。In the embodiment of the present invention, the
本发明的实施例中,信号接收机10放置于船体前部的密封舱内,其接收遥控信号并把信号发送给航行控制器9,以实现对无人帆船的远程遥控。In the embodiment of the present invention, the
本发明的实施例中,信息综合处理计算机13放置于船体前部的方形密封舱内,其根据设定的使命及双目摄像头24、GPS接收机12等传感器的信息进行自主路径规划。In the embodiment of the present invention, the integrated
综上所述,本发明的一种可飞行双体无人帆船,可在水面航行模式和空中飞行模式间自主切换。在水面航行模式下,帆船由风力提供动力,此时船帆垂直于水平面,由航行控制器控制风帆迎风角度,实现水面风力驱动航行、转弯,如有必要,使用6S航模电池供电,由帆船前部的螺旋桨推进器提供续航动力,实现其在水面的快速航行,通过自主路径规划至指定位置。在飞行模式下,船帆由竖直状态转换为水平状态,通过6S航模电池供电,通过航行控制器控制推进电机的转速以及机翼和尾舵的角度,实现水面起飞和空中飞行。位于无人帆船前端的摄像头在航行过程中对周围海洋环境进行观测,并自主进行目标跟踪及障碍物识别。In summary, a flying catamaran unmanned sailing ship of the present invention can switch autonomously between the surface navigation mode and the air flight mode. In the surface sailing mode, the sailboat is powered by the wind. At this time, the sail is perpendicular to the horizontal plane. The sailing controller controls the windward angle of the sail to realize sailing and turning driven by the wind on the water surface. The internal propeller propeller provides endurance power, realizes its fast navigation on the water surface, and plans to the designated position through autonomous path planning. In flight mode, the sail is converted from a vertical state to a horizontal state, powered by a 6S model airplane battery, and the speed of the propulsion motor and the angle of the wing and tail rudder are controlled by the navigation controller to realize water takeoff and air flight. The camera located at the front of the unmanned sailing ship observes the surrounding ocean environment during navigation, and independently performs target tracking and obstacle identification.
本发明提供的一种可飞行双体无人帆船,是一种具备飞行、航行两种方式的无人帆船系统,融合机器视觉,可实现长时间远距离作业,自主路径规划,及时躲避障碍物并可以实现快速转场,依靠太阳能和风能提供持续动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。A flying catamaran unmanned sailing ship provided by the present invention is an unmanned sailing ship system with two modes of flying and sailing, which integrates machine vision, can realize long-term long-distance operation, autonomous path planning, and avoid obstacles in time And it can achieve rapid transition, relying on solar and wind energy to provide continuous power, green and pollution-free, and has broad application prospects in water body data collection, water surface patrol, and ocean exploration.
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。The above descriptions are only preferred embodiments of the present invention, and are not intended to limit the present invention. Any modifications, equivalent replacements and improvements made within the spirit and principles of the present invention should be included in the protection of the present invention. within range.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211184617.4ACN115535233A (en) | 2022-09-27 | 2022-09-27 | A flying catamaran unmanned sailing ship |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211184617.4ACN115535233A (en) | 2022-09-27 | 2022-09-27 | A flying catamaran unmanned sailing ship |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115535233Atrue CN115535233A (en) | 2022-12-30 |
Family
ID=84729779
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211184617.4APendingCN115535233A (en) | 2022-09-27 | 2022-09-27 | A flying catamaran unmanned sailing ship |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115535233A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116872661A (en)* | 2023-09-07 | 2023-10-13 | 中国海洋大学 | Ocean aircraft |
| CN116902152A (en)* | 2023-08-22 | 2023-10-20 | 浙江大学湖州研究院 | A cross-domain catamaran unmanned sailboat |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09109987A (en)* | 1995-10-20 | 1997-04-28 | Seiji Mizouchi | Catamaran type sailing boat |
| CN204173154U (en)* | 2014-10-09 | 2015-02-25 | 中国航天空气动力技术研究院 | A kind of modularized combination type unmanned plane |
| CN205738030U (en)* | 2015-12-27 | 2016-11-30 | 中山艾德克智能控制科技有限公司 | A new type of unmanned sailboat powered by wind-solar complementary energy and its control method |
| CN106904273A (en)* | 2017-01-26 | 2017-06-30 | 龙川 | Sailing boat seaplane |
| CN107352011A (en)* | 2016-05-10 | 2017-11-17 | 天津市沽上艺栈文化艺术传媒有限公司 | A kind of multipurpose binary unmanned boat |
| CN107972869A (en)* | 2017-11-29 | 2018-05-01 | 北京航空航天大学 | A kind of across water sky medium unmanned vehicle of variable configuration binary |
| CN207817528U (en)* | 2018-02-08 | 2018-09-04 | 南京信息工程大学 | A kind of autonomous cruise makes a return voyage formula unmanned boat |
| CN113156960A (en)* | 2021-04-28 | 2021-07-23 | 苏州优世达智能科技有限公司 | Unmanned ship autonomous obstacle avoidance system based on combination of binocular vision and millimeter wave radar |
| CN113955092A (en)* | 2021-12-01 | 2022-01-21 | 中航金城无人系统有限公司 | Vertical take-off and landing fixed wing unmanned aerial vehicle with modularized duck-type layout |
| US20220063689A1 (en)* | 2004-11-10 | 2022-03-03 | Ge Global Sourcing Llc | Vehicle control system and method |
| KR20220073901A (en)* | 2020-11-26 | 2022-06-03 | 조선대학교산학협력단 | Marine environment monitoring system |
- 2022
- 2022-09-27CNCN202211184617.4Apatent/CN115535233A/enactivePending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09109987A (en)* | 1995-10-20 | 1997-04-28 | Seiji Mizouchi | Catamaran type sailing boat |
| US20220063689A1 (en)* | 2004-11-10 | 2022-03-03 | Ge Global Sourcing Llc | Vehicle control system and method |
| CN204173154U (en)* | 2014-10-09 | 2015-02-25 | 中国航天空气动力技术研究院 | A kind of modularized combination type unmanned plane |
| CN205738030U (en)* | 2015-12-27 | 2016-11-30 | 中山艾德克智能控制科技有限公司 | A new type of unmanned sailboat powered by wind-solar complementary energy and its control method |
| CN107352011A (en)* | 2016-05-10 | 2017-11-17 | 天津市沽上艺栈文化艺术传媒有限公司 | A kind of multipurpose binary unmanned boat |
| CN106904273A (en)* | 2017-01-26 | 2017-06-30 | 龙川 | Sailing boat seaplane |
| CN107972869A (en)* | 2017-11-29 | 2018-05-01 | 北京航空航天大学 | A kind of across water sky medium unmanned vehicle of variable configuration binary |
| CN207817528U (en)* | 2018-02-08 | 2018-09-04 | 南京信息工程大学 | A kind of autonomous cruise makes a return voyage formula unmanned boat |
| KR20220073901A (en)* | 2020-11-26 | 2022-06-03 | 조선대학교산학협력단 | Marine environment monitoring system |
| CN113156960A (en)* | 2021-04-28 | 2021-07-23 | 苏州优世达智能科技有限公司 | Unmanned ship autonomous obstacle avoidance system based on combination of binocular vision and millimeter wave radar |
| CN113955092A (en)* | 2021-12-01 | 2022-01-21 | 中航金城无人系统有限公司 | Vertical take-off and landing fixed wing unmanned aerial vehicle with modularized duck-type layout |
Non-Patent Citations (2)
| Title |
|---|
| BRENDEN HERKENHOFF, JAROD FISHER, CHRISTOPHER DINELLI AND MOSTAFA HASSANALIAN: "Energy Harvesting Techniques for Hybrid Amphibious Drones in the Marine Environment", 《AIAA PROPULSION AND ENERGY 2020 FORUM》, 17 August 2020 (2020-08-17), pages 2020 - 3959* |
| 钟鹏, 张彪, 陈冲: "水空两栖多旋翼无人机研究和设计", 《现代电子技术》, vol. 44, no. 20, 31 October 2021 (2021-10-31), pages 127 - 132* |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116902152A (en)* | 2023-08-22 | 2023-10-20 | 浙江大学湖州研究院 | A cross-domain catamaran unmanned sailboat |
| CN116872661A (en)* | 2023-09-07 | 2023-10-13 | 中国海洋大学 | Ocean aircraft |
| CN116872661B (en)* | 2023-09-07 | 2023-11-28 | 中国海洋大学 | Ocean aircraft |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110481777B (en) | Water-air amphibious unmanned rescue platform | |
| Rockenbauer et al. | Dipper: A Dynamically Transitioning Aerial-Aquatic Unmanned Vehicle. | |
| CN111231592B (en) | Rocket boosting type cross-medium self-adaptive submersible unmanned aerial vehicle and control method | |
| Zufferey et al. | Sailmav: Design and implementation of a novel multi-modal flying sailing robot | |
| CN106627010A (en) | Water-air amphibious unmanned aerial vehicle | |
| CN113859530B (en) | Multi-purpose cross-medium aircraft carrying AUV | |
| CN112572707A (en) | Intelligent inspection system for offshore wind power | |
| CN106394845A (en) | Seaborne detection robot driven by both wave energy and wind energy | |
| CN105644752A (en) | A new type of unmanned sailboat powered by wind-solar complementary energy and its control method | |
| CN205738030U (en) | A new type of unmanned sailboat powered by wind-solar complementary energy and its control method | |
| CN112124489B (en) | An Unmanned Ground Effect Wing Ship Based on Folding Wings | |
| CN115535233A (en) | A flying catamaran unmanned sailing ship | |
| CN106428495A (en) | Marine unmanned vehicle directly driven by wind energy | |
| CN110641663A (en) | Large underwater vehicle with self-disposable wings | |
| CN108438137A (en) | The unmanned Wutai rock group of multifunctional rescue and its working method | |
| CN108860454A (en) | A kind of round-the-clock long voyage unmanned sailing boat design method | |
| CN110775266A (en) | Sea-air amphibious aircraft based on hybrid power of oil and electricity | |
| Sun et al. | Design and field test of a foldable wing unmanned aerial–underwater vehicle | |
| CN113697077B (en) | Propulsion device for aircraft, aircraft and control method for aircraft | |
| CN113212084A (en) | Ice-water amphibious unmanned ship suitable for polar region sea area | |
| CN116750191B (en) | Variable cross-medium unmanned ship | |
| CN111762306A (en) | A hybrid drive underwater glider with ring wings | |
| CN114019993A (en) | Control method of portable multi-terrain unmanned aerial vehicle | |
| Jin et al. | Nezha‐SeaDart: A tail‐sitting fixed‐wing vertical takeoff and landing hybrid aerial underwater vehicle | |
| CN209051572U (en) | Foldable wing sail and ocean current promote underwater unmanned platform |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |