CN115510660A - Infrared weak and small target detection method based on deep sparse low-rank neural network - Google Patents
Infrared weak and small target detection method based on deep sparse low-rank neural networkDownload PDFInfo
- Publication number
- CN115510660A CN115510660ACN202211213534.3ACN202211213534ACN115510660ACN 115510660 ACN115510660 ACN 115510660ACN 202211213534 ACN202211213534 ACN 202211213534ACN 115510660 ACN115510660 ACN 115510660A
- Authority
- CN
- China
- Prior art keywords
- infrared
- image
- target
- sparse
- rank
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/28—Quantising the image, e.g. histogram thresholding for discrimination between background and foreground patterns
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/04—Constraint-based CAD
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/07—Target detection
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Databases & Information Systems (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Computational Linguistics (AREA)
- Data Mining & Analysis (AREA)
- Molecular Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mathematical Physics (AREA)
- Computer Hardware Design (AREA)
- Geometry (AREA)
- Image Analysis (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明隶属于遥感数字图像处理中的红外数据处理领域,具体涉及一种基于深度稀疏低秩神经网络的红外图像中弱小目标检测的算法。The invention belongs to the field of infrared data processing in remote sensing digital image processing, and specifically relates to an algorithm for detecting weak and small targets in infrared images based on a deep sparse low-rank neural network.
背景技术Background technique
具有夜间探测能力的红外弱小目标检测在目标搜索与跟踪系统中具有重要意义,该系统已广泛应用于军事监视和精确制导武器领域。目前公认的对红外弱小目标的定义为红外目标的大小在2×2和9×9的范围内,或者占整个图像的比例小于0.15%。红外搜索与跟踪系统依赖于目标检测方法的精确检测结果。然而,由于红外弱小目标常常具备体积小、亮度低特点,使其通常不具备空间特征。并且待检测的目标往往处于复杂背景中或者受到海杂波、云杂波的影响,使得噪声和背景经常被错误检测为目标。Infrared faint target detection with night detection capability is of great significance in target search and tracking systems, which have been widely used in military surveillance and precision guided weapons. The currently accepted definition of small infrared targets is that the size of the infrared target is within the range of 2×2 and 9×9, or the proportion of the entire image is less than 0.15%. Infrared search and track systems rely on accurate detection results from object detection methods. However, due to the characteristics of small size and low brightness, weak infrared targets usually do not have spatial characteristics. Moreover, the target to be detected is often in a complex background or affected by sea clutter and cloud clutter, so that noise and background are often misdetected as targets.
近年来,许多学者致力于提高红外弱小目标检测方法的性能,并针对这一任务提出了各种检测算法。通常,所提出的红外弱小目标检测方法可大致分为两类,即检测前跟踪算法和跟踪前检测算法。基于检测前跟踪的方法旨在基于一致轨迹假设的前提下,在多帧图像中跟踪红外弱小目标。许多检测前跟踪算法是基于3D匹配滤波、最大似然估计算提出的。这类算法通常需要处理数百帧的数据,因此一般具有较高的时间复杂度。基于跟踪前检测方法的模型旨在抑制背景并突出显示小目标。这类方法目前分为4种:基于背景空间一致性方法、基于神经网络的学习模型、基于目标显著性方法和基于红外块图像方法。这些算法都需要计算目标和背景的特性,通过目标增强和背景抑制的方式来检测图像。然而,由于弱小目标不具备特异性的空间特征,使得跟踪前检测方法经常受到背景和噪声的干扰。In recent years, many scholars have devoted themselves to improving the performance of infrared dim and small target detection methods, and proposed various detection algorithms for this task. Generally, the proposed infrared faint target detection methods can be roughly divided into two categories, namely, tracking-before-detection algorithms and detection-before-tracking algorithms. Track-before-detection-based methods aim to track small infrared targets in multiple frames of images under the assumption of consistent trajectories. Many tracking-before-detection algorithms are proposed based on 3D matched filtering and maximum likelihood estimation. Such algorithms usually need to process hundreds of frames of data, so they generally have high time complexity. Models based on track-before-detection methods aim to suppress the background and highlight small objects. These methods are currently divided into four types: methods based on background space consistency, learning models based on neural networks, methods based on object saliency and methods based on infrared block images. These algorithms all need to calculate the characteristics of the target and the background, and detect the image by means of target enhancement and background suppression. However, because small objects do not have specific spatial features, pre-tracking detection methods are often disturbed by background and noise.
发明内容Contents of the invention
本发明为了解决不同环境背景下,红外图像中弱小目标精确检测的问题,提出了一种基于深度稀疏低秩神经网络的红外弱小目标检测方法。通过构建的稀疏红外图像块模型检测红外小目标,利用交替方向乘子法对模型中的变量进行迭代更新,并将构建的模型展开成卷积神经网络以更新模型参数,以获得最终的目标检测结果。In order to solve the problem of accurate detection of weak and small targets in infrared images under different environmental backgrounds, the present invention proposes a detection method for infrared weak and small targets based on a deep sparse low-rank neural network. Detect infrared small targets through the constructed sparse infrared image block model, use the alternating direction multiplier method to iteratively update the variables in the model, and expand the constructed model into a convolutional neural network to update the model parameters to obtain the final target detection result.
为解决上述难题,本发明采取授权书内容的技术方案为:In order to solve the above problems, the present invention adopts the technical solution of the content of the authorization letter as follows:
本发明的技术要点为:输入一张待检测的红外图像,并在红外图像中设置一个从左上到右下移动的滑动窗口来提取红外局部图像块。矢量化这些局部图像块,形成图像块矩阵。因为背景信息通常具有低秩特性,而且弱小目标在每个图像块中具有稀疏特性,我们构建优化方程来解决红外弱小目标检测问题。此外,在稀疏正则项中使用学习稀疏变换来抑制边缘和角点。提出的优化模型可以用交替方向乘子法算法有效地求解。最后,将提出的弱小目标检测模型的迭代步骤展开到深度网络中。提出的深度稀疏低秩神经网络包含四层,分别是稀疏先验层、低秩先验层、重构层和乘子更新层。通过设计多个卷积神经网络层对学习稀疏变换进行训练。网络中的参数在不同层之间进行训练和共享。The technical gist of the invention is as follows: input an infrared image to be detected, and set a sliding window moving from upper left to lower right in the infrared image to extract infrared local image blocks. These local image blocks are vectorized to form an image block matrix. Because background information usually has low-rank characteristics, and small objects have sparse characteristics in each image patch, we construct optimization equations to solve the infrared small object detection problem. Furthermore, a learned sparse transformation is used in the sparse regularization term to suppress edges and corners. The proposed optimization model can be efficiently solved with the Alternating Direction Multiplier Method algorithm. Finally, the iterative steps of the proposed diminutive object detection model are expanded into a deep network. The proposed deep sparse low-rank neural network consists of four layers, which are sparse prior layer, low rank prior layer, reconstruction layer and multiplier update layer. Learning sparse transformations are trained by designing multiple convolutional neural network layers. The parameters in the network are trained and shared between different layers.
本发明为解决红外弱小目标检测问题所采取的技术方案是:The technical scheme adopted by the present invention to solve the problem of infrared weak and small target detection is:
步骤一、输入一张空间尺寸为M×N的红外图像fD。设计一个滑动窗口w,按照固定步长s从红外图像fD的左上角移动到右下角,提取红外图像fD中的局部图像块。并将提取得到所有局部图像块向量化,组成空间尺寸为m×n的红外块图像D;
步骤二、利用红外块图像中背景和目标的低秩与稀疏特性,建立凸优化方程对红外弱小目标进行检测。基于背景一致性假设,推导出红外块图像的背景B是一个低秩矩阵。同时利用目标与背景的差异推出目标红外块图像T是一个稀疏矩阵;
步骤三、利用稀疏学习增强凸优化方程中目标稀疏约束项,并利用增广拉格朗日算法对建立的凸优化问题进行重构。对于目标图像T的求解引入辅助变量h。在此基础上,使用交替方向乘子法分别迭代求解目标红外块图像T,红外块背景图像B,辅助变量h以及拉格朗日乘子U;Step 3: Using sparse learning to enhance the target sparse constraint item in the convex optimization equation, and using the augmented Lagrangian algorithm to reconstruct the established convex optimization problem. For the solution of the target image T, an auxiliary variable h is introduced. On this basis, use the alternate direction multiplier method to iteratively solve the target infrared block image T, the infrared block background image B, the auxiliary variable h and the Lagrangian multiplier U;
步骤四、将建立的稀疏目标检测模型展开成卷积神经网络,分别设计稀疏先验层、低秩先验层、重构层和乘子更新层更新求解各个变量及辅助变量过程中涉及到的参数。通过构建神经网络,实现这些参数的共享以及优化,以寻求最优解;
步骤五、判断红外块图像D与迭代输出的目标红外块图像T,红外块背景图像B是否满足收敛条件。如果满足,则输出目标红外块图像T和红外块背景图像B;如果不满足,则返回步骤三继续迭代循环;
步骤六、将输出的目标红外块图像T和红外块背景图像B中的每一列参照步骤一中的向量化方法,恢复为局部图像块。并按照滑动窗的步长对局部图像块进行拼接。将原图中相同位置像素所对应的各个局部图像块内的像素值取中值作为输出图像中的最终灰度值,从而得到红外弱小目标检测结果。Step 6: Referring to the vectorization method in
上述步骤二的操作如下:The operation of the
通过构建凸优化方程,红外弱小目标检测问题可以表示为By constructing a convex optimization equation, the problem of small infrared target detection can be expressed as

其中,D是红外块图像,N是噪声,λ是正则化参数,||·||0代表l0范数,rank(·)代表矩阵的秩;由于l0范数的求解是NP-hard问题,不能够直接求解;因此,利用l1范数代替l0范数,并且用核范数求解矩阵的秩,则公式(1)可以改写为Among them, D is the infrared block image, N is the noise,λ is theregularization parameter,|||| The problem cannot be solved directly; therefore, using the l1 norm instead of the l0 norm, and using the nuclear norm to solve the rank of the matrix, the formula (1) can be rewritten as

其中,||·||*代表核范数,||·||1代表l1范数,||·||F代表Frobrnius范数,δ是一个接近于0的常数。Among them, ||·||* represents the nuclear norm, ||·||1 represents the l1 norm, ||·||F represents the Frobrnius norm, and δ is a constant close to 0.
步骤三的具体过程如下所示:The specific process of step three is as follows:
利用公式(2)检测到的目标通常会受到图像背景和噪声的影响;因此,利用稀疏转换增强检测目标的稀疏性,则公式(2)可以被表示为The target detected by formula (2) is usually affected by image background and noise; therefore, using sparse transformation to enhance the sparsity of the detected target, formula (2) can be expressed as

其中,

其中,ρ是惩罚参数,Y是拉格朗日乘子,λ1和λ2是正则化参数;用交替方向乘子法分别求解公式(4)中的B和T,如下所示Among them, ρ is the penalty parameter, Y is the Lagrange multiplier, λ1 andλ2 are the regularization parameters; B and T informula (4) are solved respectively by the method of alternating direction multipliers, as follows

其中,

其中,σi,ui和vi是对D-T+U进行奇异值分解之后得到的结果中的第i个数值,max(·)代表求取最大值;Bt代表第t次迭代产生的B的值;变量T的求解是一个线性逆问题,使用迭代收缩阈值算法对其进行求解;具体而言,利用迭代收缩阈值算法交替求解辅助变量ht和Tt,如下所示Among them, σi , ui and vi are the i-th value in the result obtained after the singular value decomposition of D-T+U, max( ) represents the maximum value; Bt represents the value generated by the t-th iteration The value of B; the solution of the variable T is a linear inverse problem, which is solved using the iterative shrinkage threshold algorithm; specifically, the iterative shrinkage threshold algorithm is used to alternately solve the auxiliary variables ht and Tt , as shown below


其中

步骤四的具体过程如下所示:The specific process of
设计重建层ht;根据公式(7),第t次迭代的重建结果与第t-1次迭代的输出有关,即Bt-1、Ut-1和Tt-1;在第一次迭代中,B0、U0和T0被设置为D;超参数







设计乘子更新层Ut;格朗日乘子在该层更新为公式(5);



本发明具有以下有益技术效果:The present invention has the following beneficial technical effects:
本发明提出的基于深度稀疏低秩神经网络(LS-IPINet)的红外弱小目标检测方法利用对背景空间的低秩约束正则项和对弱小目标的稀疏约束正则项建立目标检测的凸优化方程;利用交替方向乘子法对所构建的凸优化方程进行加速求解;并将迭代步骤展开到深度学习网络,通过建立多层深度卷积模块,对模型参数进行自动迭代优化;通过深度学习的负反馈机制以及损失函数对参数更新以及加以约束,以保证输出最优参数,从而得到最优的目标检测结果。相比较于基于密集嵌套的注意网络(DNANet)、基于注意力金字塔上下文网络(AGPCNet)、基于对数张量核范数(LogTFNN)、基于部分张量核范数(PSTNN)和基于红外图像块(IPI)的弱小目标检测方法得到的目标检测结果,本发明的算法可以在不同环境背景条件下,对不同种类的弱小目标实现精确的检测。The infrared weak and small target detection method based on the deep sparse low-rank neural network (LS-IPINet) proposed by the present invention utilizes the low-rank constrained regular term to the background space and the sparse constrained regular term to the weak and small target to establish a convex optimization equation for target detection; The alternating direction multiplier method accelerates the solution of the constructed convex optimization equation; and the iterative steps are expanded to the deep learning network, and the model parameters are automatically iteratively optimized by establishing a multi-layer deep convolution module; through the negative feedback mechanism of deep learning And the loss function updates and constrains the parameters to ensure that the optimal parameters are output, so as to obtain the optimal target detection results. Compared with dense nesting-based attention network (DNANet), attention-based pyramid context network (AGPCNet), logarithmic tensor nuclear norm-based (LogTFNN), partial tensor nuclear norm-based (PSTNN) and infrared image-based The target detection result obtained by the weak and small target detection method of block (IPI), the algorithm of the present invention can realize accurate detection to different kinds of weak and small targets under different environmental background conditions.
由于红外弱小目标的体积小、亮度低,使得其难以从图像中被检测到,因此,本发明的提出为了提高红外弱小目标检测算法在小目标检测方面的性能,解决其在杂波背景下的目标检测结果不准确的问题。具体包括:利用滑动窗将原始红外图像分割为一系列的红外图像块;建立基于目标稀疏表示和背景低秩约束的目标检测模型;输入红外图像块,利用交替方向乘子法求解目标检测模型的各个变量;并将所提出的模型展开成卷积神经网络,不断更新模型中相关的参数;重构得到的红外图像块中的目标检测结果;输出红外图像的目标检测结果。本发明在不同背景环境下对具有不同属性的红外目标均能够取得较好的检测结果。Due to the small size and low brightness of the infrared weak and small targets, it is difficult to be detected from the image. Therefore, the present invention proposes to improve the performance of the infrared weak and small target detection algorithm in small target detection, and solve its problem in the clutter background. The problem of inaccurate target detection results. Specifically, it includes: using a sliding window to divide the original infrared image into a series of infrared image blocks; establishing a target detection model based on target sparse representation and background low-rank constraints; inputting infrared image blocks, using the alternating direction multiplier method to solve the target detection model Each variable; and expand the proposed model into a convolutional neural network, and continuously update the relevant parameters in the model; reconstruct the target detection results in the infrared image block; output the target detection results of the infrared image. The invention can obtain better detection results for infrared targets with different attributes under different background environments.
附图说明Description of drawings
图1为本发明算法的程序流程图(基于LS-IPINet的红外弱小目标检测方法流程图)。Fig. 1 is a program flow chart of the algorithm of the present invention (the flow chart of the infrared weak and small target detection method based on LS-IPINet).
图2为红外块图像生成示意图。Fig. 2 is a schematic diagram of infrared block image generation.
图3为红外块图像背景低秩示意图。Fig. 3 is a low-rank schematic diagram of the background of an infrared block image.
图4为输出红外块图像转换为检测结果的示意图。Fig. 4 is a schematic diagram of converting an output infrared block image into a detection result.
图5为多种弱小目标检测方法检测结果图。Figure 5 is a diagram of the detection results of various weak and small target detection methods.
图6为多种弱小目标检测方法检测结果的三维可视化结果。Figure 6 shows the three-dimensional visualization results of the detection results of various weak and small target detection methods.
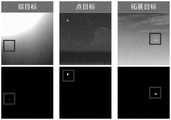
图7为拓展目标、点目标与弱目标示意图。Fig. 7 is a schematic diagram of an extended target, a point target and a weak target.
图8(a)为多个点目标图像ROC曲线。Figure 8(a) is the ROC curve of multiple point target images.
图8(b)为多个弱目标和点目标图像ROC曲线。Figure 8(b) shows the ROC curves for multiple weak targets and point targets.
图8(c)为多个所有类型图像ROC曲线。Figure 8(c) shows ROC curves for multiple images of all types.
图9为LS-IPINet在NUST-SIRST数据集中目标检测结果。Figure 9 shows the target detection results of LS-IPINet in the NUST-SIRST dataset.
具体实施方法Specific implementation method
下面结合附图和实施实例对本发明进行详细说明。The present invention will be described in detail below in conjunction with the accompanying drawings and implementation examples.
如图1所示,本发明的具体实施步骤如下:As shown in Figure 1, the specific implementation steps of the present invention are as follows:
(1)输入一张空间尺寸为M×N的红外图像fD。设计一个滑动窗口w,按照固定步长s从红外图像fD的左上角移动到右下角,提取红外图像fD中的局部图像块,如图2所示。并将提取得到所有局部图像块向量化,组成空间尺寸为m×n的红外块图像D。(1) Input an infrared image fD with a spatial size of M×N. Design a sliding window w, move from the upper left corner of the infrared image fD to the lower right corner according to the fixed step size s, and extract the local image blocks in the infrared image fD , as shown in Figure 2. All the extracted local image blocks are vectorized to form an infrared block image D with a spatial size of m×n.
(2)利用红外块图像中背景和目标的低秩与稀疏特性,建立凸优化方程对红外弱小目标进行检测。由于热辐射、衍射的影响,提取的局部图像块与其周围的图像块相关,表现出非局部自相关特性。由于背景部分通常变化较为平缓,像素之间相关性较高,因此红外块图像的背景B是一个低秩矩阵。相反,通常弱小目标的像素强度与周围像素强度存在较大差异,因此目标红外块图像T是一个稀疏矩阵。(2) Using the low-rank and sparse characteristics of the background and targets in the infrared block image, a convex optimization equation is established to detect small infrared targets. Due to the influence of thermal radiation and diffraction, the extracted local image block is related to its surrounding image blocks, showing non-local autocorrelation characteristics. Since the background part usually changes slowly and the correlation between pixels is high, the background B of the infrared block image is a low-rank matrix. On the contrary, usually there is a large difference between the pixel intensity of the weak target and the surrounding pixel intensity, so the target infrared block image T is a sparse matrix.
(3)利用稀疏学习增强凸优化方程中目标稀疏约束项,并利用增广拉格朗日算法对建立的凸优化问题进行重构。对于目标图像T的求解引入辅助变量h。在此基础上,使用交替方向乘子法分别迭代求解目标红外块图像T,红外块背景图像B,辅助变量h以及拉格朗日乘子U。(3) Sparse learning is used to enhance the target sparse constraints in the convex optimization equation, and the augmented Lagrangian algorithm is used to reconstruct the established convex optimization problem. For the solution of the target image T, an auxiliary variable h is introduced. On this basis, the target infrared block image T, the infrared block background image B, the auxiliary variable h and the Lagrangian multiplier U are iteratively solved by using the alternating direction multiplier method.
(4)将建立的稀疏目标检测模型展开成卷积神经网络,分别设计稀疏先验层、低秩先验层、重构层和乘子更新层更新求解各个变量及辅助变量过程中涉及到的参数。通过构建神经网络,实现这些参数的共享以及优化。以寻求最优解。(4) Expand the established sparse target detection model into a convolutional neural network, respectively design the sparse prior layer, low-rank prior layer, reconstruction layer and multiplier update layer to update and solve the variables and auxiliary variables involved in the process parameter. By constructing a neural network, the sharing and optimization of these parameters are realized. to find the optimal solution.
(5)判断红外块图像D与迭代输出的目标红外块图像T,红外块背景图像B是否满足收敛条件。如果满足,则输出目标红外块图像T和红外块背景图像B;如果不满足,则返回步骤(3)继续迭代循环。(5) Judging whether the infrared block image D, the iterative output target infrared block image T, and the infrared block background image B satisfy the convergence condition. If it is satisfied, output the target infrared block image T and the infrared block background image B; if not, return to step (3) to continue the iterative cycle.
(6)将输出的目标红外块图像T和红外块背景图像B中的每一列参照步骤(1)中的向量化方法,恢复为局部图像块。并按照滑动窗的步长对局部图像块进行拼接。如图4所示,将原图中相同位置像素所对应的各个局部图像块内的像素值取中值作为输出图像中的最终计算值,从而得到红外弱小目标检测结果。(6) Referring to the vectorization method in step (1), each column in the output target infrared block image T and infrared block background image B is restored as a local image block. And according to the step size of the sliding window, the local image blocks are spliced. As shown in Figure 4, the median value of the pixel values in each local image block corresponding to the pixel at the same position in the original image is taken as the final calculation value in the output image, so as to obtain the detection result of the small infrared target.
在上述红外弱小目标检测方法的步骤中,步骤(2)的具体操作如下:In the steps of the method for detecting infrared weak and small targets, the specific operation of step (2) is as follows:
由于热辐射、衍射的影响,提取的局部图像块与其周围的图像块相关,表现出非局部自相关特性。如图3所示,图中第一排图像是红外原始图像,第二排图像是对应的红外块图像的奇异值曲线图。所有曲线都迅速衰减到0,这表明红外块图像的背景B是一个低秩矩阵。相反,通常弱小目标的像素强度与周围像素强度存在较大差异,因此目标红外块图像T是一个稀疏矩阵。因此,红外小目标检测问题可以表示为Due to the influence of thermal radiation and diffraction, the extracted local image block is related to its surrounding image blocks, showing non-local autocorrelation characteristics. As shown in FIG. 3 , the first row of images in the figure is the original infrared image, and the second row of images is the singular value curve of the corresponding infrared block image. All curves quickly decay to 0, which indicates that the background B of the infrared block image is a low-rank matrix. On the contrary, usually there is a large difference between the pixel intensity of the weak target and the surrounding pixel intensity, so the target infrared block image T is a sparse matrix. Therefore, the infrared small target detection problem can be expressed as

其中,D是红外块图像,N是噪声,λ是正则化参数,||·||0代表l0范数,rank(·)代表矩阵的秩。然而,l0范数的求解是NP-hard问题,不能够直接求解。因此,我们用l1范数代替l0范数,并且用核范数求解矩阵的秩,则公式(1)可以改写为where D is the infrared block image, N is the noise, λ is the regularization parameter, ||·||0 represents the l0 norm, and rank(·) represents the rank of the matrix. However, the solution of the l0 norm is an NP-hard problem and cannot be solved directly. Therefore, we replace the l0 norm with the l1 norm, and use the kernel norm to solve the rank of the matrix, then formula (1) can be rewritten as

其中,||·||*代表核范数,||·||1代表l1范数,||·||F代表Frobrnius范数,δ是一个接近于0的常数。Among them, ||·||* represents the nuclear norm, ||·||1 represents the l1 norm, ||·||F represents the Frobrnius norm, and δ is a constant close to 0.
步骤(3)的具体操作如下:The concrete operation of step (3) is as follows:
利用公式(2)检测到的目标通常会受到图像背景和噪声的影响。因此,我们利用稀疏转换

其中,
利用增广拉格朗日乘子法对公式(3)进行优化,可以得到如下表达形式Using the augmented Lagrange multiplier method to optimize formula (3), the following expression can be obtained

其中,ρ是惩罚参数,Y是拉格朗日乘子,λ1和λ2是正则化参数。然后,用交替方向乘子法分别求解公式(4)中的B和T,如下所示where ρ is the penalty parameter, Y is the Lagrangian multiplier, andλ1 andλ2 are the regularization parameters. Then, B and T in Equation (4) are solved separately by the method of alternating direction multipliers, as follows

其中,

其中,σi,ui和vi是对D-T+U进行奇异值分解之后得到的结果中的第i个数值,max(·)代表求取最大值。Bt代表第t次迭代产生的B的值。变量T的求解是一个线性逆问题,使用迭代收缩阈值算法对其进行求解。具体而言,我们利用迭代收缩阈值算法交替求解辅助变量ht和Tt,如下所示Among them, σi , ui and vi are the i-th value in the result obtained after performing singular value decomposition on D-T+U, and max(·) represents finding the maximum value. Bt represents the value of B produced by the t-th iteration. The solution of the variable T is a linear inverse problem, which is solved using an iterative shrinkage threshold algorithm. Specifically, we utilize the iterative shrinkage threshold algorithm to alternately solve for the auxiliary variables ht and Tt as follows


其中

步骤(4)的具体操作如下:The concrete operation of step (4) is as follows:
将步骤(3)中介绍的目标检测模型中的所有迭代都展开到设计的深层网络中,得到深度稀疏低秩神经网络。这个网络被设计用来学习和更新目标检测模型中的一些参数,其中包括


1)设计重建层ht。根据公式(7),第t次迭代的重建结果与第t-1次迭代的输出有关,即Bt-1、Ut-1和Tt-1。在第一次迭代中,B0、U0和T0的初始值设置为D。超参数

2)设计稀疏先验层Tt。该层根据公式(8)的不断更新增强了目标Tt的稀疏特性。我们设计了一个的6层卷积神经网络,通过数百组训练数据的学习、训练和验证,得到了一个完备的稀疏变换矩阵




3)设计低秩先验层Bt。根据公式(6),Bt通过具有软阈值方案的奇异值分解来求解。在深度稀疏低秩神经网络中,学习阈值以获得最优值,如下所示3) Design a low-rank prior layer Bt . According to equation (6),Bt is solved by singular value decomposition with a soft thresholding scheme. In a deep sparse low-rank neural network, the threshold is learned to obtain the optimal value as follows

4)设计乘子更新层Ut。拉格朗日乘子在该层更新为公式(5)。
为证明本发明的有效性,设计了以下实验:For proving effectiveness of the present invention, designed following experiment:
本发明将通过以下实验进行有效性的说明The present invention will carry out the illustration of effectiveness by following experiment
1.实验数据:1. Experimental data:
我们在公开红外目标检测数据集NUAA-SIRST上评估了基于深度稀疏低秩神经网络的目标检测模型,该数据集包含427幅代表性图像,其中包括480种不同类型的目标。在NUAA-SIRST数据集的图像中,约90%的图像包含单个目标,约55%的目标仅占图像的0.02%,约65%的目标较暗,根据亮度只能检测到35%的目标。在实验中,我们首先将图像空间尺寸调整为300×300,然后分别从原始数据集中提取50%、20%、30%图像,分别进行训练、验证和测试。为了验证目标检测模型的鲁棒性,我们在公开红外目标检测数据集NUST-SIRST中进行鲁棒性验证实验。NUST-SIRST包含10000幅红外小目标图像,其空间尺寸为128×128。该数据集中的背景多种多样,包括云、城市、河流和道路。这个数据集中的小目标是从其他真实红外小目标数据集中分离出来,或通过二维高斯函数合成。然而,NUST-SIRST数据集中的一些红外目标尺寸太大,不满足小目标的定义。因此,我们选取了50张包含不同类型的弱小目标图像进行鲁棒性实验。We evaluate our deep sparse low-rank neural network based object detection model on the publicly available infrared object detection dataset NUAA-SIRST, which contains 427 representative images, including 480 different types of objects. In the images of the NUAA-SIRST dataset, about 90% of the images contain a single object, about 55% of the objects only occupy 0.02% of the image, about 65% of the objects are dark, and only 35% of the objects can be detected according to the brightness. In the experiment, we first resize the image space to 300×300, and then extract 50%, 20%, 30% images from the original dataset for training, validation and testing, respectively. In order to verify the robustness of the target detection model, we conduct a robustness verification experiment on the public infrared target detection dataset NUST-SIRST. NUST-SIRST contains 10,000 infrared small target images, and its spatial size is 128×128. The backgrounds in this dataset are diverse, including clouds, cities, rivers, and roads. The small targets in this dataset are separated from other real infrared small target datasets, or synthesized by a two-dimensional Gaussian function. However, some infrared objects in the NUST-SIRST dataset are too large in size to meet the definition of small objects. Therefore, we selected 50 images containing different types of weak objects for robustness experiments.
2.实验结果及结果分析2. Experimental results and result analysis
为了验证本发明所提出的算法在红外弱小目标检测方面的优越性,我们比较了基于密集嵌套的注意网络(DNANet)、基于注意力金字塔上下文网络(AGPCNet)、基于对数张量核范数(LogTFNN)、基于部分张量核范数(PSTNN)和基于红外图像块(IPI)的弱小目标检测方法。所有数据驱动的模型都在NUAA-SIRST数据集上进行重新训练。In order to verify the superiority of the algorithm proposed in the present invention in the detection of small infrared targets, we compared the attention network (DNANet) based on dense nesting, the attention pyramid context network (AGPCNet) based on the attention, and the logarithmic tensor kernel norm based (LogTFNN), Partial Tensor Kernel Norm-based (PSTNN) and Infrared Image Patch (IPI)-based faint target detection methods. All data-driven models are retrained on the NUAA-SIRST dataset.
在图5中,我们展示了7幅图像的弱小目标检测结果,这些图像代表了7种典型场景。为了统一不同目标检测方法的输出形式,我们将灰度图像的目标和背景分割成具有自适应阈值的二值图像,阈值Tadp的选取如下所示In Fig. 5, we show the faint object detection results on 7 images representing 7 typical scenes. In order to unify the output forms of different target detection methods, we segment the target and background of the grayscale image into a binary image with an adaptive threshold, and the selection of the threshold Tadp is as follows
Tadp=max[max(M)×0.7,0.5×σM+μM] (10)Tadp =max[max(M)×0.7,0.5×σM +μM ] (10)
其中,M代表任意目标检测结果,max(·)表示矩阵中的最大值,σM是矩阵M的标准差,μM是矩阵M的平均灰度值。在图5中,相同图像的目标检测结果列在同一行中,同时,相同方法的目标检测结果列在同一列中。Among them, M represents any target detection result, max(·) represents the maximum value in the matrix, σM is the standard deviation of matrix M, and μM is the average gray value of matrix M. In Fig. 5, object detection results for the same image are listed in the same row, and meanwhile, object detection results for the same method are listed in the same column.
对于第一幅图象,LogTFNN和PSTNN无法完全提取目标,同时IPI也无法检测到目标。AGPCNet检测到的目标形状与真值图略有不同,可能会影响后续检测结果的应用。LS-IPINet和DNANet可以很好地保护检测到的目标形状。第二幅输入图像旨在测试这些模型的多目标检测能力。检测结果表明,每种算法都能准确定位这些目标的位置。我们将检测到的目标进行放大。实验结果表明,在所有模型中,本发明提出的算法对目标的形状保持得最好,尤其是图像中第二个放大矩形突出显示的目标。第三幅图像中的目标是弱目标。该目标与背景的对比度较低,导致检测困难。由于对比度低,IPI无法用低秩正则化将目标与背景分离,AGPCNet也是如此。LogTFNN和PSTNN可以检测到目标的部分像素。DNANet和LS-IPINet可以很好地检测到目标。第四幅图像中的目标是复杂背景中的微弱孤立点目标。由于其强度与周围像素不同,因此每种算法都能准确定位目标的位置。与DNANet和AGPCNet检测到的目标相比,IPI、LogTFNN和PSTNN算法检测到的目标相对较小。第五幅图像中的目标很难被观察到。IPI和DNANet无法定位这幅图像中的目标。PSTNN可以检测到该目标的位置。LogTFNN、AGPCNet和LS-IPINet可以取得良好的检测结果。然而,LogTFNN的目标检测结果中误警率很高。第六幅和第七幅图像用来测试这些模型对检测到的目标形状的保持能力。IPI模型几乎检测不到两幅图像中的目标。LogTFNN、PSTNN和AGPCNet可以检测两个目标的位置,但不能完全保持目标的形状。DNANet和LS-IPINet可以很好地保持两个目标的形状。DNANet和LS-IPINet的性能不受背景环境信息的影响。总体而言,我们提出的LS-IPINet可以在不同背景下对多种类型的目标精确检测并保持目标形状。For the first image, LogTFNN and PSTNN cannot fully extract the target, and IPI cannot detect the target at the same time. The target shape detected by AGPCNet is slightly different from the ground truth map, which may affect the application of subsequent detection results. LS-IPINet and DNANet can well preserve the detected object shapes. The second input image is intended to test the multi-object detection capabilities of these models. The detection results show that each algorithm can accurately locate the location of these objects. We scale up the detected objects. Experimental results show that among all the models, the algorithm proposed by the present invention preserves the shape of the object best, especially the object highlighted by the second enlarged rectangle in the image. The object in the third image is a weak object. The object has low contrast with the background, making detection difficult. Due to low contrast, IPI cannot separate objects from background with low-rank regularization, and so does AGPCNet. LogTFNN and PSTNN can detect some pixels of the object. DNANet and LS-IPINet can detect objects well. The target in the fourth image is a faint isolated point target in a complex background. Since its intensity differs from surrounding pixels, each algorithm pinpoints the target's location. Compared with the objects detected by DNANet and AGPCNet, the objects detected by IPI, LogTFNN and PSTNN algorithms are relatively small. The target in the fifth image is hard to see. IPI and DNANet were unable to localize objects in this image. PSTNN can detect the location of this object. LogTFNN, AGPCNet and LS-IPINet can achieve good detection results. However, the false alarm rate in the object detection results of LogTFNN is high. The sixth and seventh images are used to test the ability of these models to maintain the detected object shape. The IPI model barely detects objects in both images. LogTFNN, PSTNN, and AGPCNet can detect the locations of two objects, but cannot fully preserve the shape of the objects. DNANet and LS-IPINet can maintain the shape of two objects well. The performance of DNANet and LS-IPINet is not affected by the background environment information. Overall, our proposed LS-IPINet can accurately detect and preserve object shapes for multiple types of objects under different backgrounds.
所有模型的三维可视化结果如图6所示。从三维可视化结果中,我们可以直接观察到误检和漏检目标。可以观察到IPI和LogTFNN模型总是将背景中的元素误检为目标。由于第三幅图像和第五幅图像中目标较弱且背景复杂,大多数目标检测模型在这两幅图像中不能很好的检测到目标。我们提出的LS-IPINet检测到的目标可以在三维可视化结果中被清晰地观察到,误检较少。The 3D visualization results of all models are shown in Fig. 6. From the 3D visualization results, we can directly observe false detection and missed detection targets. It can be observed that the IPI and LogTFNN models always misdetect elements in the background as targets. Since the objects in the third and fifth images are weak and the background is complex, most object detection models cannot detect objects well in these two images. The objects detected by our proposed LS-IPINet can be clearly observed in the 3D visualization results with less false detections.
如图7所示,根据目标类型,我们将NUAA-SIRST数据集中的红外图像分为三类,即扩展目标图像、点目标图像和弱目标图像。根据不同算法的检测结果绘制如图8所示的ROC曲线。从图8(a)和图8(b)可以看出,随着弱目标比例的增加,IPI、LogTFNN和PSTNN算法的性能在一定程度上有所下降。由于弱目标比点目标更暗、更小,因此弱目标更难检测,尤其是在杂乱的背景下。相反,DNANet和LS-IPINet算法的性能得到了提高。图8(c)表明,DNANet和LS-IPINet算法对各种场景具备鲁棒性,而我们提出的LS-IPINet实现了最高的精度的检测。As shown in Fig. 7, according to the target type, we divide the infrared images in the NUAA-SIRST dataset into three categories, namely extended target images, point target images and weak target images. According to the detection results of different algorithms, the ROC curve shown in Figure 8 is drawn. From Figure 8(a) and Figure 8(b), it can be seen that as the proportion of weak objects increases, the performance of IPI, LogTFNN and PSTNN algorithms decreases to a certain extent. Since weak targets are dimmer and smaller than point targets, weak targets are more difficult to detect, especially against cluttered backgrounds. On the contrary, the performance of DNANet and LS-IPINet algorithms is improved. Figure 8(c) shows that the DNANet and LS-IPINet algorithms are robust to various scenarios, while our proposed LS-IPINet achieves the highest detection accuracy.
如图9所示,我们将手动标记的NUST-SIRST真值图与本发明提出的LS-IPINet的检测结果进行了比较。我们观察到,LS-IPINet的检测结果与真值图的形状相比,检测到的目标的形状更加接近于真值。同时也验证了本发明提出的目标检测方法在不同的训练数据集中都可以得到较好的目标检测结果。As shown in Fig. 9, we compare the manually labeled NUST-SIRST ground-truth map with the detection results of our proposed LS-IPINet. We observe that the detection results of LS-IPINet are closer to the ground truth than the shape of the ground truth map. At the same time, it is also verified that the target detection method proposed by the present invention can obtain better target detection results in different training data sets.
我们在NUAA-SIRST数据集中使用的不同训练数据量来测试本发明提出的LS-IPINet的性能。训练数据量分别为50、100、150、200、250和300。我们选择了127幅图像作为测试数据,这些测试图像不包含在训练数据中。定量结果列在表1中,其中每列中的最优值用粗体表示,次优值用下划线标记。We use different amounts of training data in the NUAA-SIRST dataset to test the performance of our proposed LS-IPINet. The training data volumes are 50, 100, 150, 200, 250, and 300, respectively. We selected 127 images as test data, which were not included in the training data. Quantitative results are listed in Table 1, where optimal values in each column are indicated in bold and suboptimal values are underlined.
表1不同训练数据量下的LS-IPINet算法性能评价指标对比Table 1 Comparison of LS-IPINet algorithm performance evaluation indicators under different training data volumes

在表1中,我们观察到,随着训练数据从50增加到250,IoU不断增长。然而,训练数据为300的IoU降至0.6758,低于训练数据为100的IoU。nIoU在训练数据为100时达到了最高点。尽管随着训练数据的增加,nIoU的数值有所下滑,但是训练数据量为100、150和200的nIoU相较于其他训练数据组的nIoU较高。不同训练数据量下的AUC值变化不大。AUC在训练数据为300时达到了最高值,不同训练数据量下的AUC值均高于0.93。不同训练数据量下的SCRGs均大于83,表明这些训练后的LS-IPINets都能突出红外图像中的目标。然而,不同评价指标的最优值分布在不同的训练数据量模型中,这导致难以确定最佳的训练数据的数量。我们观察到,大多数次优值都在训练数据为200的结果中,这表明使用150到200幅图像训练的LS-IPINet具有更全面的性能。同时,我们观察到,训练数据量为50的IoU、nIoU和AUC仅比最优值低8.19%、8.7%、3.2%。与其他训练数据得到的模型相比,在训练数据量为50时,训练的LS-IPINet也取得了良好的性能。并且,此时的LS-IPINet的性能接近DNANet和AGPCNet。此外,与训练数据量为300的LS-IPINet模型相比,用50组数据训练的LS-IPINet可以节省更多的训练时间。In Table 1, we observe that the IoU keeps growing as the training data increases from 50 to 250. However, the IoU for the training data of 300 drops to 0.6758, which is lower than the IoU for the training data of 100. nIoU reaches the highest point when the training data is 100. Although the value of nIoU decreases with the increase of training data, the nIoU of the training data volume of 100, 150 and 200 is higher than that of other training data sets. The AUC values under different training data volumes do not change much. AUC reaches the highest value when the training data is 300, and the AUC values under different training data amounts are all higher than 0.93. The SCRGs under different amounts of training data are all greater than 83, indicating that these trained LS-IPINets can highlight objects in infrared images. However, the optimal values of different evaluation metrics are distributed in models with different amounts of training data, which makes it difficult to determine the optimal amount of training data. We observe that most of the suboptimal values are in the results with training data of 200, suggesting that LS-IPINet trained with 150 to 200 images has more comprehensive performance. At the same time, we observe that the IoU, nIoU, and AUC with a training data size of 50 are only 8.19%, 8.7%, and 3.2% lower than the optimal values. Compared with models obtained from other training data, the trained LS-IPINet also achieved good performance when the amount of training data was 50. Moreover, the performance of LS-IPINet at this time is close to DNANet and AGPCNet. In addition, compared with the LS-IPINet model with 300 training data, LS-IPINet trained with 50 sets of data can save more training time.
Claims (4)
Translated fromChinese























Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211213534.3ACN115510660A (en) | 2022-09-30 | 2022-09-30 | Infrared weak and small target detection method based on deep sparse low-rank neural network |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211213534.3ACN115510660A (en) | 2022-09-30 | 2022-09-30 | Infrared weak and small target detection method based on deep sparse low-rank neural network |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115510660Atrue CN115510660A (en) | 2022-12-23 |
Family
ID=84508676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211213534.3APendingCN115510660A (en) | 2022-09-30 | 2022-09-30 | Infrared weak and small target detection method based on deep sparse low-rank neural network |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115510660A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117853760A (en)* | 2023-05-29 | 2024-04-09 | 杭州越达图谱科技有限公司 | Infrared small target detection method and device based on representation learning |
| CN118396943A (en)* | 2024-04-22 | 2024-07-26 | 江苏济远医疗科技有限公司 | A method for small object anomaly detection in medical images based on multi-step iterative optimization |
| CN120219940A (en)* | 2025-05-28 | 2025-06-27 | 北京科技大学 | A method for detecting small targets in underwater sonar images |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109325446A (en)* | 2018-09-19 | 2019-02-12 | 电子科技大学 | An infrared weak and small target detection method based on weighted truncation kernel norm |
| CN114882231A (en)* | 2022-05-25 | 2022-08-09 | 南京邮电大学 | Infrared small target detection method based on multi-angle prior analysis |
| CN115100415A (en)* | 2022-08-04 | 2022-09-23 | 中国人民解放军国防科技大学 | Infrared small target detection method and device in complex noise scene and storage medium |
- 2022
- 2022-09-30CNCN202211213534.3Apatent/CN115510660A/enactivePending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109325446A (en)* | 2018-09-19 | 2019-02-12 | 电子科技大学 | An infrared weak and small target detection method based on weighted truncation kernel norm |
| CN114882231A (en)* | 2022-05-25 | 2022-08-09 | 南京邮电大学 | Infrared small target detection method based on multi-angle prior analysis |
| CN115100415A (en)* | 2022-08-04 | 2022-09-23 | 中国人民解放军国防科技大学 | Infrared small target detection method and device in complex noise scene and storage medium |
Non-Patent Citations (1)
| Title |
|---|
| XINYU ZHOU ET AL.: "Deep Low-Rank and Sparse Patch-Image Network for Infrared Dim and Small Target Detection", 《JOURNAL OF LATEX CLASS FILES》, 9 September 2020 (2020-09-09), pages 1 - 14* |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117853760A (en)* | 2023-05-29 | 2024-04-09 | 杭州越达图谱科技有限公司 | Infrared small target detection method and device based on representation learning |
| CN118396943A (en)* | 2024-04-22 | 2024-07-26 | 江苏济远医疗科技有限公司 | A method for small object anomaly detection in medical images based on multi-step iterative optimization |
| CN120219940A (en)* | 2025-05-28 | 2025-06-27 | 北京科技大学 | A method for detecting small targets in underwater sonar images |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wang et al. | SAT-GCN: Self-attention graph convolutional network-based 3D object detection for autonomous driving | |
| Ghaderizadeh et al. | Hyperspectral image classification using a hybrid 3D-2D convolutional neural networks | |
| CN110472627B (en) | An end-to-end SAR image recognition method, device and storage medium | |
| Zhu et al. | Deep learning meets SAR: Concepts, models, pitfalls, and perspectives | |
| Qi et al. | FTC-Net: Fusion of transformer and CNN features for infrared small target detection | |
| Venugopal | Automatic semantic segmentation with DeepLab dilated learning network for change detection in remote sensing images | |
| CN115510660A (en) | Infrared weak and small target detection method based on deep sparse low-rank neural network | |
| Liu et al. | Bipartite differential neural network for unsupervised image change detection | |
| CN115147731A (en) | A SAR Image Target Detection Method Based on Full Spatial Coding Attention Module | |
| Wang et al. | Lightweight deep neural networks for ship target detection in SAR imagery | |
| CN108038445A (en) | A kind of SAR automatic target recognition methods based on various visual angles deep learning frame | |
| Tun et al. | Remote sensing data classification using a hybrid pre-trained VGG16 CNN-SVM classifier | |
| CN109934178A (en) | A Kronecker-Based Sparse Representation-Based Method for Infrared Small and Small Target Detection | |
| CN105678284A (en) | Fixed-position human behavior analysis method | |
| Tao et al. | Pooling operations in deep learning: from “invariable” to “variable” | |
| CN109215025B (en) | Infrared weak and small target detection method based on non-convex rank approach minimization | |
| CN106845343B (en) | Automatic detection method for optical remote sensing image offshore platform | |
| Chen et al. | Change detection algorithm for multi-temporal remote sensing images based on adaptive parameter estimation | |
| CN115223033A (en) | Synthetic aperture sonar image target classification method and system | |
| Chuang et al. | Learning-guided point cloud vectorization for building component modeling | |
| Venu | Object detection in motion estimation and tracking analysis for IoT devices | |
| Lin et al. | A-SATMVSNet: An attention-aware multi-view stereo matching network based on satellite imagery | |
| Li et al. | Learning a cross-modality anomaly detector for remote sensing imagery | |
| Gao et al. | Multidirectional graph learning-based infrared cirrus detection with local texture features | |
| Xi et al. | Multitarget detection algorithms for multitemporal remote sensing data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |