CN115469655A - A certificate storage method, device and computer-readable storage medium - Google Patents
A certificate storage method, device and computer-readable storage mediumDownload PDFInfo
- Publication number
- CN115469655A CN115469655ACN202211047892.1ACN202211047892ACN115469655ACN 115469655 ACN115469655 ACN 115469655ACN 202211047892 ACN202211047892 ACN 202211047892ACN 115469655 ACN115469655 ACN 115469655A
- Authority
- CN
- China
- Prior art keywords
- information
- certificate
- storage
- instruction
- certificates
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Economics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Quality & Reliability (AREA)
- Operations Research (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- Marketing (AREA)
- General Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Theoretical Computer Science (AREA)
- Entrepreneurship & Innovation (AREA)
- Development Economics (AREA)
- Finance (AREA)
- Accounting & Taxation (AREA)
- Manipulator (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及证件管理技术领域,尤其涉及一种证件存储方法、设备和计算机可读存储介质。The present invention relates to the technical field of credential management, in particular to a credential storage method, device and computer-readable storage medium.
背景技术Background technique
随着社会的发展,各种证件在人们的日常工作和生活所发挥着重要的作用,证件类型包括:身份证件、护照、社保卡等。由于我国人口基数庞大,每种证件的数量相应的也是一个巨量的存在,如果仅凭人力管理证件的存储,效率低下、浪费时间,给人民的日常生活会带来较大的不便。因此,如何安全且高效的对证件进行存取管理是一个亟待解决的问题。With the development of society, various documents play an important role in people's daily work and life. The types of documents include: identity documents, passports, social security cards, etc. Due to the huge population base in our country, the number of each type of certificate is correspondingly huge. If the storage of certificates is only managed by manpower, it will be inefficient, waste time, and bring great inconvenience to people's daily life. Therefore, how to safely and efficiently access and manage certificates is an urgent problem to be solved.
发明内容Contents of the invention
基于此,有必要针对上述凭人力进行法定基础证件的存储管理,效率低下、浪费时间的问题,提出了一种证件存储方法、设备和计算机可读存储介质,能够安全且高效地进行证件存取管理。Based on this, it is necessary to solve the problems of inefficiency and time-wasting in the storage and management of statutory basic certificates by manpower, and propose a certificate storage method, equipment and computer-readable storage medium, which can safely and efficiently carry out certificate access manage.
一种证件存取方法,应用于证件存储设备,所述证件存储设备包括用于存储证件的存储仓,所述存储仓包括多个存储槽位,用于运输所述证件的运载机器人;A certificate access method, applied to a certificate storage device, the certificate storage device includes a storage bin for storing certificates, the storage bin includes a plurality of storage slots, and a carrier robot for transporting the certificates;
所述证件存取方法包括如下步骤:The certificate access method includes the following steps:
获取调度指令,所述调度指令包括提取证件的证件信息或存储证件的证件信息;Obtaining a dispatching instruction, the dispatching instruction including certificate information for extracting certificates or certificate information for storing certificates;
根据所述调度指令选取与所述证件信息匹配的槽位信息,获取邻近所述槽位信息的待选工位,获取每个所述待选工位的占用信息,根据所述占用信息从所述待选工位中选出目标工位;Select the slot information matching the certificate information according to the scheduling instruction, obtain the candidate stations adjacent to the slot information, obtain the occupancy information of each of the candidate stations, and obtain the occupancy information from all the candidate stations according to the occupancy information. Select the target station from the stations to be selected;
根据所述目标工位生成指示指令,所述指示指令用于指示所述运载机器人运动至所述目标工位。An instruction instruction is generated according to the target station, and the instruction instruction is used to instruct the carrier robot to move to the target station.
所述获取每个所述待选工位的占用信息的步骤,包括:The step of obtaining the occupancy information of each of the candidate workstations includes:
获取邻近所述多个待选工位的机械手的状态信息,根据所述状态信息和所述占用信息选出所述目标工位。Obtain state information of manipulators adjacent to the plurality of stations to be selected, and select the target station according to the state information and the occupancy information.
所述状态信息包括空闲状态、工作状态以及故障状态;The status information includes idle status, working status and fault status;
按照所述空闲状态、所述工作状态以及所述故障状态依次筛选机械手,并得到多个工位的使用优先级信息;Screening manipulators sequentially according to the idle state, the working state, and the fault state, and obtaining priority information for use of multiple stations;
根据所述使用优先级信息和所述占用信息确定所述目标工位。The target workstation is determined according to the usage priority information and the occupancy information.
所述根据所述状态信息和所述占用信息选出所述目标工位的步骤,包括:The step of selecting the target station according to the state information and the occupancy information includes:
当所述机械手均处于工作状态时,获取所述运载机器人到达每个所述机械手对应的待选工位的运动时长,将最长的所述运动时长对应的待选工位作为所述目标工位。When the manipulators are all in the working state, obtain the movement duration of the carrier robot to reach each station to be selected corresponding to the manipulator, and use the station to be selected corresponding to the longest movement time as the target station bit.
所述证件存取方法还包括:The certificate access method also includes:
在预设间隔时长内接收多个所述调度指令;receiving multiple scheduling instructions within a preset interval;
当多个所述调度指令中存在用于提取证件的调度指令,获取待提取的证件的存储信息,根据所述存储信息和所述占用信息获取所述槽位信息;When there is a scheduling instruction for extracting certificates among the plurality of scheduling instructions, obtaining storage information of the certificates to be extracted, and obtaining the slot information according to the storage information and the occupation information;
当多个所述调度指令均为用于存储证件的调度指令时,获取所述存储仓中的所述待选槽位分布情况,从所述待选槽位分布密集的区域中选出所述槽位信息。When a plurality of the scheduling instructions are scheduling instructions for storing certificates, obtain the distribution of the slots to be selected in the storage bin, and select the slots from the area where the slots to be selected are densely distributed. slot information.
所述获取待提取的证件的存储信息,根据所述存储信息和所述占用信息获取所述槽位信息的步骤,包括:The step of obtaining the storage information of the certificate to be extracted, and obtaining the slot information according to the storage information and the occupation information includes:
当多个所述调度指令中存在多个用于提取证件的调度指令,获取每一个用于提取证件的调度指令对应的待提取的证件的存储信息;When there are multiple dispatching instructions for extracting certificates among the plurality of dispatching instructions, acquiring the storage information of the certificates to be extracted corresponding to each dispatching instruction for extracting certificates;
获取多个所述存储信息的存储槽位在所述存储仓中的分布情况;根据所述分布情况确定所述存储仓中证件分布密集的区域对应的待选工位,选出所述目标工位。Obtaining the distribution of a plurality of storage slots for storing information in the storage bin; determining the candidate station corresponding to the area where certificates are densely distributed in the storage bin according to the distribution, and selecting the target station bit.
所述驱动所述运载机器人根据所述指示指令运动至所述目标工位的步骤,包括:The step of driving the carrier robot to move to the target station according to the instruction includes:
获取运载机器人的运行参数,根据所述运行参数获取所述运载机器人的优先级,所述运行参数包括运行轨迹、运行速度、运行加速度、已运行时长中的至少一项;Obtain the operating parameters of the carrying robot, and obtain the priority of the carrying robot according to the operating parameters, and the operating parameters include at least one of running trajectory, running speed, running acceleration, and running time;
当至少两辆所述运载机器人同时到达路口时,驱动所述至少两辆运载机器人按照所述优先级从高到低的顺序依次通过所述路口。When at least two of the delivery robots arrive at the intersection at the same time, the at least two delivery robots are driven to pass through the intersection in order of priority from high to low.
一种证件存取设备,所述证件存储设备包括用于存储证件的存储槽位,用于运输所述证件的运载机器人;A certificate access device, the certificate storage device includes storage slots for storing certificates, and a carrying robot for transporting the certificates;
所述证件存取设备包括如下模块:The certificate access device includes the following modules:
指令模块,用于获取调度指令,所述调度指令包括提取证件的证件信息或存储证件的证件信息;An instruction module, configured to obtain a scheduling instruction, the scheduling instruction includes certificate information for extracting certificates or certificate information for storing certificates;
选取模块,用于根据所述调度指令选取与所述证件信息匹配的槽位信息,获取邻近所述槽位信息的多个待选工位,获取每个所述待选工位的占用信息,根据所述占用信息从所述多个待选工位中选出目标工位;A selecting module, configured to select slot information matching the credential information according to the scheduling instruction, obtain a plurality of candidate stations adjacent to the slot information, and obtain occupancy information of each candidate station, selecting a target station from the plurality of candidate stations according to the occupancy information;
生成模块,用于根据所述目标工位生成指示指令,所述指示指令用于指示所述运载机器人运动至所述目标工位。A generating module, configured to generate an instruction instruction according to the target station, and the instruction instruction is used to instruct the carrier robot to move to the target station.
一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上所述方法的步骤。A computer-readable storage medium stores a computer program, and when the computer program is executed by a processor, the processor executes the steps of the above method.
一种证件存储设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上所述方法的步骤。A credential storage device includes a memory and a processor, the memory stores a computer program, and when the computer program is executed by the processor, the processor executes the steps of the above method.
采用本发明实施例,具有如下有益效果:Adopting the embodiment of the present invention has the following beneficial effects:
证件存取方法应用于证件存储设备,证件存储设备包括用于存储证件的存储仓和多个运载机器人作为证件管理的系统,运载机器人用于证件的运载,存储仓包括多个存储槽位,存储槽位用于存储证件。根据用于存储证件或者提取证件的调度指令选取槽位信息,获取邻近槽位信息的待选工位,待选工位为可用于停靠运载机器人的位置;通过获取每个所述待选工位的占用信息,根据所述占用信息从所述待选工位中选出目标工位,目标工位为从多个待选工位中选择出的当前用于停靠运载机器人的位置;根据所述目标工位生成指示指令,所述指示指令用于指示运载机器人运动至所述目标工位,以便于通过多个待选工位的状态确定并得到能够快速响应停靠运载机器人的优选的工位,优选地工位作为目标工位,能顾有效地提高停靠运载机器人的效率,从而能够实现证件的自动存取,有效降低人力成本,提升存取效率,避免存取失误,提升证件存取安全性。The certificate access method is applied to a certificate storage device. The certificate storage device includes a storage bin for storing certificates and a plurality of carrying robots as a certificate management system. The carrying robots are used for carrying certificates. The storage bin includes multiple storage slots. Slots are used to store credentials. Select the slot information according to the scheduling instruction for storing certificates or extracting certificates, and obtain the candidate stations adjacent to the slot information. The candidate stations are the positions that can be used to dock the carrier robot; occupancy information, select a target station from the candidate stations according to the occupancy information, and the target station is the current location for docking the carrier robot selected from a plurality of candidate stations; according to the The target station generates an instruction instruction, the instruction instruction is used to instruct the carrier robot to move to the target station, so as to determine and obtain the preferred station that can quickly respond to the docking robot through the status of multiple candidate stations, Preferably, the station is used as the target station, which can effectively improve the efficiency of docking and carrying robots, thereby realizing automatic access to documents, effectively reducing labor costs, improving access efficiency, avoiding access errors, and improving the security of document access .
附图说明Description of drawings
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the following will briefly introduce the drawings that need to be used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description are only These are some embodiments of the present invention. Those skilled in the art can also obtain other drawings based on these drawings without creative work.
其中:in:
图1为本发明提供的一个实施例中证件存取方法的应用环境图;Fig. 1 is an application environment diagram of a certificate access method in an embodiment provided by the present invention;
图2是本发明提供的证件存取方法的第一实施例的流程示意图;Fig. 2 is a schematic flow chart of the first embodiment of the certificate access method provided by the present invention;
图3是本发明提供的证件存取方法的第二实施例的流程示意图;Fig. 3 is a schematic flow chart of the second embodiment of the certificate access method provided by the present invention;
图4是本发明提供的证件存取方法的第三实施例的流程示意图;Fig. 4 is a schematic flow chart of the third embodiment of the certificate access method provided by the present invention;
图5是本发明提供的证件存取方法的第四实施例的流程示意图;Fig. 5 is a schematic flow chart of the fourth embodiment of the certificate access method provided by the present invention;
图6是本发明提供的证件存取设备的一实施例的结构示意图;Fig. 6 is a schematic structural diagram of an embodiment of a certificate access device provided by the present invention;
图7是本发明提供的证件存取设备的一实施例的内部结构图。Fig. 7 is an internal structure diagram of an embodiment of the certificate access device provided by the present invention.
具体实施方式detailed description
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
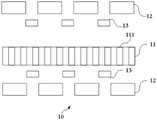
请参阅图1,图1为本发明提供的一个实施例中证件存取方法的应用环境图。参照图1,该证件存取方法应用于证件存储设备系统。该证件存储设备10包括用于存储证件的存储仓11,存储仓11中包括多个存储槽位111,每个存储槽位111 中用于存放一个证件,可以存放的证件包括各种法定基础证件(如身份证件、护照、社保卡等),由于各种法定基础证件的尺寸并不相同,因此存储槽位111具有不同的尺寸,以适应存放各种不同的证件,且合理利用尺寸。在其他实施场景中,存储操槽位111可以具有相同的尺寸,减少存储证件时所需的计算步骤,提升存储效率。Please refer to FIG. 1 . FIG. 1 is an application environment diagram of a certificate access method in an embodiment provided by the present invention. Referring to Fig. 1, the credential access method is applied to a credential storage device system. The
证件存储设备10中还包括多个工位12和至少一个机械手13(例如,2个),用于运输证件的运载机器人停靠于工位12上。每个机械手13具有对应的多个工位,能够从工位12停靠的运载机器人上抓取证件并投放至存储槽位111中,以实现证件的存储,或者是从存储槽位111中抓取证件并投放至运载机器人上,以实现证件的提取。将距离一存储槽位111的距离低于预设距离的工位12作为该存储槽位111的邻近的工位。从图1中能够看出,每个存储槽位111具有多个邻近的工位。每个工位12也可以是多个存储槽位111的邻近的工位。The
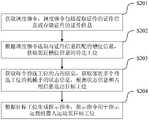
请参阅图2,图2是本发明提供的证件存取方法的第一实施例的流程示意图。本发明提供的证件存取方法包括如下步骤:Please refer to FIG. 2 . FIG. 2 is a schematic flowchart of the first embodiment of the certificate access method provided by the present invention. The certificate access method provided by the present invention includes the following steps:
S101:获取调度指令,调度指令包括提取证件的证件信息或存储证件的证件信息。S101: Obtain a scheduling instruction, where the scheduling instruction includes credential information for extracting a credential or credential information for storing a credential.
在一个具体的实施场景中,获取调度指令,调度指令可设置为用于存储证件的调度指令或用于提取证件的调度指令。调度指令可以是基于用户的存储操作或者提取操作生成。调度指令包括提取证件和存储证件的证件信息。提取证件的证件信息可以包括证件的编号、存储槽位位置或槽位标识中的至少一项。存储证件的证件信息可以包括证件的种类、编号、存储标识中的至少一项。证件信息可以是根据待存储的证件进行证件识别获取的,也可以是根据用户输入的提取证件的指示信息获取的。In a specific implementation scenario, the scheduling instruction is obtained, and the scheduling instruction may be set as a scheduling instruction for storing certificates or a scheduling instruction for extracting certificates. Scheduling instructions can be generated based on user storage or retrieval operations. Dispatch instructions include credential information for extracting credential and storing credential. The credential information of the extracted credential may include at least one of the serial number of the credential, the location of the storage slot, or the identifier of the slot. The credential information of the stored credential may include at least one of the type, serial number, and storage identifier of the credential. The credential information may be acquired based on the credential identification of the credential to be stored, or may be acquired according to the instruction information input by the user for extracting the credential.
S102:根据调度指令选取与证件信息匹配的槽位信息,获取邻近槽位信息的待选工位。S102: Select the slot information matching the certificate information according to the scheduling instruction, and obtain the candidate positions of adjacent slot information.
在一个具体的实施场景中,根据调度指令选取与证件信息匹配的槽位信息,可以理解为,当调度指令为提取证件的调度指令时,根据调度指令得到对应的存储有证件的槽位信息,进而获取槽位信息对应的证件。当调度指令为存储证件的调度指令时,可基于证件的类型获得匹配存储仓对应槽位信息,槽位信息为能够用于存储证件的存储槽位的槽位信息;其中,存储证件过程中可得到多个槽位对应的槽位信息。In a specific implementation scenario, the slot information that matches the certificate information is selected according to the dispatching instruction. It can be understood that when the dispatching instruction is a dispatching instruction for extracting certificates, the corresponding slot information that stores the certificate is obtained according to the dispatching instruction. Then obtain the certificate corresponding to the slot information. When the scheduling instruction is a scheduling instruction for storing certificates, the corresponding slot information of the matching storage warehouse can be obtained based on the type of certificate, and the slot information is the slot information of the storage slots that can be used to store certificates; wherein, the process of storing certificates can be Obtain slot information corresponding to multiple slots.
S103:获取每个待选工位的占用信息,根据占用信息从待选工位中选出目标工位。S103: Obtain occupancy information of each candidate station, and select a target station from the candidate stations according to the occupancy information.
在一个具体的实施场景中,获取邻近槽位信息的待选工位,当运载机器人停靠在待选工位上时,机械手能够将槽位信息对应的存储槽位中的证件转移至运载机器人中,或者能够将运载机器人装载的证件投放至槽位信息对应的存储槽位中。一个槽位信息可以对应多个待选工位,需要从这多个待选工位中选择一个作为目标工位,从而运载机器人能够停靠在目标工位上。In a specific implementation scenario, the candidate station of adjacent slot information is obtained, and when the carrier robot docks on the candidate station, the manipulator can transfer the credentials in the storage slot corresponding to the slot information to the carrier robot , or the certificate loaded by the carrier robot can be dropped into the storage slot corresponding to the slot information. One slot information may correspond to multiple candidate stations, and one of the multiple candidate stations needs to be selected as the target station, so that the carrier robot can dock on the target station.
可以获取每个待选工位的占用比,根据占用信息从待选工位中选出目标工位。例如,多个待选工位中,已经有若干个待选工位上停靠了运载机器人,则从未停靠运载机器人的待选工位上选择出目标工位。再例如,若干个待选工位对应的机械手处于工作状态,剩余的待选工位对应的机械手处于空闲状态,则从剩余的待选工位中选出目标工位。当存在多个可以选择的待选工位时,例如,存在多个未停靠运载机器人的待选工位,或者存在多个待选工位对应空闲状态的机械手,则可以从这些待选工位中随机选择出目标工位,还可以从这些待选工位中根据预设选择规则选出目标工位。预设选择规则可以是运输路程最短、运输时间最短等,由用户根据自身需求预选设定。The occupancy ratio of each candidate station can be obtained, and the target station can be selected from the candidate stations according to the occupancy information. For example, among the plurality of candidate stations, several of the candidate stations have already parked the carrier robot, and the target station is selected from the candidate stations that have not docked the carrier robot. For another example, if the manipulators corresponding to several to-be-selected stations are in working state, and the manipulators corresponding to the remaining to-be-selected stations are in an idle state, then a target station is selected from the remaining to-be-selected stations. When there are multiple candidate stations that can be selected, for example, there are multiple candidate stations that are not docked with the carrier robot, or there are multiple candidate stations that correspond to idle manipulators, then you can choose from these candidate stations The target station is randomly selected from among the candidates, and the target station can also be selected from these candidate stations according to the preset selection rules. The preset selection rules can be the shortest transportation distance, the shortest transportation time, etc., which are pre-selected and set by the user according to their own needs.
S104:根据目标工位生成指示指令,指示指令用于指示运载机器人运动至目标工位。其中,指示指令可设置为运载机器人的移动轨迹,或指示指令可设置为目标工位的相关信息,或指示指令可设置为调用运载机器人移动的控制指令。S104: Generate an instruction instruction according to the target station, where the instruction instruction is used to instruct the carrier robot to move to the target station. Wherein, the indication command can be set as the moving track of the carrying robot, or the indicating command can be set as the relevant information of the target station, or the indicating command can be set as a control command calling the movement of the carrying robot.
在一个具体的实施场景中,根据目标工位生成指示指令,指示指令包括运载机器人的移动轨迹,用于指示运载机器人运动至目标工位。例如,运载机器人是用于将证件运输至目标工位,从而机械手能够将该证件投放至槽位信息对应的存储槽位中。将运载机器人接收证件的位置作为起点,目标工位作为终点规划移动轨迹。移动轨迹包括行驶路线和停靠位置。可以将移动轨迹发送至运载机器人,从而运载机器人能够运动至目标工位,或者直接根据移动轨迹驱动运载机器人运动。In a specific implementation scenario, an instruction instruction is generated according to the target station, and the instruction instruction includes a movement trajectory of the carrier robot, and is used to instruct the carrier robot to move to the target station. For example, the carrying robot is used to transport the certificate to the target station, so that the manipulator can drop the certificate into the storage slot corresponding to the slot information. The location where the delivery robot receives the certificate is used as the starting point, and the target station is used as the end point to plan the movement trajectory. Movement trajectories include travel routes and stop locations. The movement track can be sent to the delivery robot so that the delivery robot can move to the target station, or the delivery robot can be driven directly according to the movement track.
在其他实施场景中,指示指令为目标工位的相关信息,运载机器人根据自身当前位置和目标工位的相关信息规划出运动路径,并根据运动路径行驶至目标工位。In other implementation scenarios, the instruction is the relevant information of the target station, and the carrier robot plans a motion path according to its current position and the relevant information of the target station, and drives to the target station according to the motion path.
在其他实施场景中,指示指令为调用运载机器人移动的控制指令,根据运载机器人当前位置和目标工位的位置规划出运载机器人的运动轨迹,根据运动轨迹生成对应的控制指令,执行该控制指令以调用运载机器人移动。In other implementation scenarios, the instruction command is a control command to call the movement of the delivery robot, and the movement trajectory of the delivery robot is planned according to the current position of the delivery robot and the position of the target station, and the corresponding control instruction is generated according to the movement trajectory, and the control instruction is executed to achieve Invokes the carrier robot to move.
在其他实施场景中,当检测运载机器人停靠在目标工位时,向机械手发送停靠通知,停靠通知包括目标工位的位置或者标识,以及机械手需要执行的操作(用于存储或提取的抓取和/或投放),还有槽位信息,以使得机械手能够精准投放或提取证件。在其他实施场景中还可以包括证件的证件信息,例如证件尺寸,纸质或者塑料材质等等,方便机械手更好的抓取证件。机械手在获取到停靠通知后,根据停靠通知执行对应的操作,从而成功存储证件或提取证件。In other implementation scenarios, when it is detected that the carrier robot is docked at the target station, a docking notification is sent to the manipulator. The docking notification includes the position or identification of the target station, and the operations that the manipulator needs to perform (grabbing and / or delivery), as well as slot information, so that the manipulator can accurately place or extract documents. In other implementation scenarios, the certificate information of the certificate can also be included, such as the size of the certificate, paper or plastic material, etc., so that the manipulator can better grab the certificate. After receiving the docking notification, the manipulator performs corresponding operations according to the docking notification, thereby successfully storing or extracting the certificate.
通过上述描述可知,在本实施例中根据用于存储证件或者提取证件的调度指令选取槽位信息,获取邻近槽位信息的待选工位,获取每个待选工位的占用信息,根据占用信息从待选工位中选出目标工位,根据目标工位生成指示指令,指示指令用于指示运载机器人运动至目标工位,从而能够实现证件的自动存取,有效降低人力成本,提升存取效率,避免存取失误,提升证件存取安全性。It can be seen from the above description that in this embodiment, the slot information is selected according to the scheduling instruction for storing or extracting certificates, the candidate stations adjacent to the slot information are obtained, and the occupancy information of each candidate station is obtained. The information selects the target station from the candidate stations, and generates instruction instructions according to the target station. The instruction instruction is used to instruct the carrier robot to move to the target station, so as to realize automatic access to certificates, effectively reduce labor costs, and improve storage efficiency. Improve access efficiency, avoid access errors, and improve the security of document access.
请参阅图3,图3是本发明提供的证件存取方法的第二实施例的流程示意图。本发明提供的证件存取方法包括如下步骤:Please refer to FIG. 3 . FIG. 3 is a schematic flowchart of a second embodiment of the certificate access method provided by the present invention. The certificate access method provided by the present invention includes the following steps:
S201:获取调度指令,调度指令包括提取证件或存储证件的证件信息;S201: Obtain a dispatching instruction, where the dispatching instruction includes certificate information for extracting certificates or storing certificates;
S202:根据调度指令选取与证件信息匹配的槽位信息,获取邻近槽位信息的待选工位。S202: According to the scheduling instruction, select the slot information that matches the certificate information, and obtain the candidate positions of adjacent slot information.
在一个具体的实施场景中,步骤S201-S202与本发明提供的证件存取方法的第一实施例的步骤S101-S102基本一致,此处不再进行赘述。In a specific implementation scenario, steps S201-S202 are basically the same as steps S101-S102 of the first embodiment of the certificate access method provided by the present invention, and will not be repeated here.
S203:获取每个待选工位的占用信息,获取邻近多个待选工位的机械手的状态信息,根据状态信息和占用信息选出目标工位。S203: Obtain occupancy information of each to-be-selected station, obtain state information of manipulators adjacent to multiple to-be-selected stations, and select a target station according to the state information and occupancy information.
在一个具体的实施场景中,获取每个待选工位的占用信息,即检测每个待选工位上是否停靠有运载机器人,若已经停靠有运载机器人,则表示待选工位被占用。还可以获取当前运动的运载机器人的目标工位,判断是否有目标工位为待选工位。若有运载机器人的目标工位为待选工位,则该待选工位被占用。从未被占用的待选工位中选出目标工位。In a specific implementation scenario, the occupancy information of each candidate station is obtained, that is, it is detected whether a carrier robot is docked at each candidate station, and if a carrier robot has been parked, it means that the candidate station is occupied. It is also possible to obtain the target station of the currently moving carrier robot, and judge whether there is a target station as a candidate station. If the target station of the robot is a candidate station, the candidate station is occupied. Select the target station from unoccupied candidate stations.
获取邻近待选工位的机械手的状态信息,状态信息包括空闲状态、工作状态以及故障状态,结合每个待选工位的占用信息和机械手的状态信息来选择目标工位。例如,优先选择处于空闲状态的机械手对应的待选工位作为目标工位,再例如,不选择处于故障状态的机械手对应的待选工位作为目标工位。Obtain the state information of the manipulator adjacent to the station to be selected. The state information includes idle state, working state and fault state, and select the target station by combining the occupancy information of each station to be selected and the state information of the manipulator. For example, the candidate station corresponding to the manipulator in the idle state is preferentially selected as the target station, and for another example, the candidate station corresponding to the manipulator in the fault state is not selected as the target station.
在一个实施场景中,按照空闲状态、工作状态以及故障状态依次筛选机械手,并得到多个工位的使用优先级信息;根据使用优先级信息和占用信息确定目标工位。In one implementation scenario, the manipulators are screened sequentially according to the idle state, working state, and fault state, and the usage priority information of multiple workstations is obtained; the target workstation is determined according to the usage priority information and occupancy information.
当所有的待选工位均被占用时,若存在处于空闲状态的机械手,则空闲状态的机械手对应的待选工位具有最高的使用优先级。若所有机械手均处于工作状态,则根据每个机械手待完成的工作量确定每个待选工位的使用优先级,工作量越低的机械手对应的待选工位的使用优先级越高。When all the candidate stations are occupied, if there is an idle manipulator, the candidate station corresponding to the idle manipulator has the highest usage priority. If all the manipulators are in the working state, the use priority of each candidate station is determined according to the workload to be completed by each manipulator, and the use priority of the candidate station corresponding to the manipulator with the lower workload is higher.
当存在未被占用的待选工位时,根据判断未被占用的待选工位对应的机械手的工作状态,若处于空闲状态,则未被占用的待选工位具有最高的使用优先级,若处于工作状态,则未被占用的待选工位具有次高的使用优先级。将具有最高使用优先级的待选工位作为目标工位。When there is an unoccupied candidate station, according to the working state of the manipulator corresponding to the unoccupied candidate station, if it is in an idle state, the unoccupied candidate station has the highest priority for use, If it is in the working state, the unoccupied candidate station has the second highest use priority. The candidate station with the highest usage priority is taken as the target station.
若存在处于故障状态的机械手,则忽略掉该机械手对应的待选工位;或者在其他机械手均处于工作状态时,若其他机械手对应的待选工位均被占用,则可以将故障状态的机械手对应的待选工位作为备选工位以供运载机器人停靠,配合其他机械手实现存取证件。If there is a manipulator in the fault state, ignore the candidate station corresponding to the manipulator; or when other manipulators are in the working state, if the candidate stations corresponding to other manipulators are all occupied, the manipulator in the fault state can be The corresponding to-be-selected station is used as an alternative station for the carrier robot to dock, and cooperate with other manipulators to access documents.
在另一个实施场景中,当所有的机械手均处于工作状态时,获取运载机器人到达每个机械手对应的待选工位的运动时长,将最长的运动时长对应的待选工位作为目标工位。运动时长可以根据指示指令中的路径规划信息以及运载机器人的运动速度得出。使用最长运动时长,能够留给机械手足够的工作时间,以使得机械手在运载机器人运动过程中完成当前的工作任务。从而该机械手对应的目标工位能够在运载机器人到达时空出,以供运载机器人停靠。In another implementation scenario, when all the manipulators are in the working state, the movement duration of the carrier robot to reach the candidate station corresponding to each manipulator is obtained, and the candidate station corresponding to the longest movement duration is taken as the target station . The movement duration can be obtained according to the path planning information in the instructions and the movement speed of the carrying robot. Using the longest motion time can leave enough working time for the manipulator, so that the manipulator can complete the current work task during the movement of the robot. Therefore, the target station corresponding to the manipulator can be vacated when the carrier robot arrives for the carrier robot to dock.
在另一个实施场景中,当所有的机械手均处于空闲状态时,获取运载机器人到达每个机械手对应的待选工位的运动时长,将最短的运动时长对应的待选工位作为目标工位,能够有效提升证件存取的效率,避免将时间浪费在运动过程中。In another implementation scenario, when all the manipulators are in an idle state, the movement duration of the carrier robot to reach the candidate station corresponding to each manipulator is obtained, and the candidate station corresponding to the shortest movement duration is taken as the target station, It can effectively improve the efficiency of certificate access and avoid wasting time in the process of exercise.
在其他实施场景中,还可以根据当前是否存在未被占用的待选工位来调整运载机器人的车速。例如当前所有的待选工位全部被占用,可以通过将运载机器人的车速按照预设规则进行降低,以给机械手留出充足的时间进行操作,从而当运载机器人运动至目标工位时,目标工位已经空出,以供运载机器人停靠。In other implementation scenarios, the speed of the carrying robot may also be adjusted according to whether there is currently an unoccupied candidate station. For example, if all the current stations to be selected are occupied, the speed of the carrying robot can be reduced according to preset rules to allow sufficient time for the manipulator to operate, so that when the carrying robot moves to the target station, the target station will Space has been vacated for the carrier robot to dock.
S204:根据目标工位生成指示指令,指示指令用于指示运载机器人运动至目标工位。S204: Generate an instruction instruction according to the target station, where the instruction instruction is used to instruct the carrier robot to move to the target station.
在一个具体的实施场景中,步骤S204与本发明提供的证件存取方法的第一实施例的步骤S104基本一致,此处不再进行赘述。In a specific implementation scenario, step S204 is basically the same as step S104 in the first embodiment of the certificate access method provided by the present invention, and will not be repeated here.
通过上述描述可知,在本实施例中,获取邻近多个待选工位的机械手的状态信息,根据状态信息和占用信息选出目标工位,能够合理安排机械手的工作任务,避免出现任务分配不均导致的效率低下问题。From the above description, it can be seen that in this embodiment, the state information of the manipulators adjacent to multiple positions to be selected is obtained, and the target position is selected according to the state information and occupancy information. lead to inefficiencies.
基于上述实施例,本发明证件存取方法还可在上述实施例的基础上,进一步地获取多个调度指令实现证件的存取,进而提高单位时间内存取证件的效率。Based on the above-mentioned embodiments, the certificate access method of the present invention can further obtain multiple scheduling instructions to realize certificate access on the basis of the above-mentioned embodiments, thereby improving the efficiency of obtaining certificates per unit time.
请参阅图4,图4是本发明提供的证件存取方法的第三实施例的流程示意图。本发明提供的证件存取方法包括如下步骤:Please refer to FIG. 4 . FIG. 4 is a schematic flowchart of a third embodiment of the certificate access method provided by the present invention. The certificate access method provided by the present invention includes the following steps:
S301:在预设间隔时长内接收多个调度指令。S301: Receive multiple scheduling instructions within a preset interval.
在一个具体的实施场景中,设置预设间隔时长,在预设间隔时长内接收多个调度指令。例如,当存取业务比较繁忙时,可能不同用户需要在短时间(例如1Min 至15Min的任意时间阀值)内存取多个证件。因此以预设间隔时长为统计单位,获取每个预设间隔时长内的调度指令。In a specific implementation scenario, a preset interval is set, and multiple scheduling instructions are received within the preset interval. For example, when the access business is relatively busy, different users may need to access multiple certificates within a short period of time (for example, any time threshold from 1Min to 15Min). Therefore, taking the preset interval as a statistical unit, the scheduling instructions within each preset interval are obtained.
基于上述,当存在一个用户请求取走证件,另一个用户请求存储证件,两人在预设间隔时长内发出请求的情况下,可采用同一个运载机器人既作为存储证件的运载设备,又作为输出证件的运载设备。例如,可以先执行提取证件的调度指令,将用户需要提取的证件提供给用户后,再执行存储证件的调度指令,将用户存入的证件存储到对应的存储槽位中,这样可以合理安排运载机器人的运输业务,有效提升证件存储的效率,降低资源消耗。Based on the above, when there is a user requesting to take away the certificate, another user requests to store the certificate, and both of them send the request within a preset interval, the same carrier robot can be used as the carrier device for storing the certificate and as the output Document carrying equipment. For example, you can first execute the scheduling instruction for extracting certificates, provide the certificates that the user needs to extract to the user, and then execute the scheduling instruction for storing the certificates, and store the certificates deposited by the user in the corresponding storage slots, so that the transportation can be arranged reasonably The transportation business of robots can effectively improve the efficiency of document storage and reduce resource consumption.
S302:当多个调度指令中存在用于提取证件的调度指令,获取待提取的证件的存储信息,根据存储信息和占用信息获取槽位信息。S302: When there is a scheduling instruction for extracting credentials among the plurality of scheduling instructions, acquire storage information of the credentials to be extracted, and acquire slot information according to the storage information and occupation information.
在一个具体的实施场景中,当多个调度指令中存在用于提取证件的调度指令,例如在预设间隔时长内接收到5个调度指令,其中有3个是用于提取证件的调度指令,2个用于存储证件的调度指令。获取待提取证件的存储信息,存储信息包括待提取的证件存储的存储槽位。待提取的证件所在的存储槽位是已知且固定的。因此可以根据根据存储信息和占用信息获取槽位信息。例如将未被占用的位于待提取的证件存储的存储槽位附近的待选工位作为目标工位,将目标工位对应的存储槽位中处于空置状态的存储槽位作为存储证件的调度指令对应的用于存储待存储的证件的存储槽位。从而机械手无需大幅度移动,就能高效完成证件存取的工作任务,有效降低工作量,提升工作效率。In a specific implementation scenario, when there are scheduling instructions for extracting certificates among the multiple scheduling instructions, for example, 5 scheduling instructions are received within a preset interval, and 3 of them are scheduling instructions for extracting certificates. 2 dispatch instructions for storing credentials. Obtain the storage information of the certificate to be extracted, and the storage information includes the storage slot where the certificate to be extracted is stored. The storage slot where the certificate to be extracted is known and fixed. Therefore, the slot information can be obtained according to the storage information and the occupation information. For example, take the unoccupied candidate station near the storage slot of the certificate to be extracted as the target station, and use the vacant storage slot in the storage slot corresponding to the target station as the scheduling instruction for storing the certificate Corresponding storage slots for storing certificates to be stored. As a result, the manipulator can efficiently complete the task of document access without large movements, effectively reducing the workload and improving work efficiency.
在其他实施场景中,获取待提取的证件存储的存储槽位在存储仓中的布情况,获取待提取的证件在存储仓中分布密集的区域,则根据分布情况确定分布密集的区域对应的待选工位,例如,现需取出5个证件,其中3个存储槽位均位于存储仓的左侧区域,则左侧区域相对于右侧区域的取证操作具有优先权,在左侧区域的对应的工位中确定待选工位,从待选工位中选出目标工位。In other implementation scenarios, the distribution of the storage slots for the certificates to be extracted in the storage bin is obtained, and the areas where the certificates to be extracted are densely distributed in the storage bin are obtained, and the corresponding slots for the densely distributed areas are determined according to the distribution. Select a station, for example, now you need to take out 5 certificates, and 3 of the storage slots are located in the left area of the storage bin, then the evidence collection operation in the left area has priority over the right area, and the corresponding in the left area The station to be selected is determined among the stations to be selected, and the target station is selected from the stations to be selected.
进一步地,还可以在左侧区域的空置的存储槽位中选择2个存储槽位作为2 个用于存储证件的调度指令对应的存储槽位。在左侧区域的存储槽位对应的待选工位中根据占用信息选择目标工位。Further, it is also possible to select two storage slots from the vacant storage slots in the left area as the storage slots corresponding to the two scheduling instructions for storing certificates. Select the target station according to the occupancy information among the stations to be selected corresponding to the storage slots in the left area.
S303:当多个调度指令均为用于存储证件的调度指令时,获取存储仓中的处于空置状态的存储槽位的分布情况,从处于空置状态的存储槽位分布密集的区域中选出槽位信息。S303: When multiple scheduling instructions are scheduling instructions for storing certificates, obtain the distribution of vacant storage slots in the storage bin, and select slots from areas where the vacant storage slots are densely distributed bit information.
在一个具体的实施场景中,当多个调度指令均为用于存储证件的调度指令时,例如在预设间隔时长内接收到5个调度指令,5个都是用于存储证件的调度指令。获取存储仓中的处于空置状态的存储槽位的分布情况,从处于空置状态的存储槽位分布密集的区域中选出槽位信息。例如,在存储仓共有100个存储槽位,在存储仓左侧具有20个空置的存储槽位,右侧具有10个空置的存储槽位,因此在存储仓左侧中选择对应于5个用于存储证件的调度指令对应的存储槽位,获取这些存储槽位的槽位信息。这样选择目标工位时,也在处于空置状态的存储槽位分布密集的区域附近的待选工位中选择目标工位。In a specific implementation scenario, when multiple dispatching instructions are dispatching instructions for storing certificates, for example, 5 dispatching instructions are received within a preset interval, and all 5 dispatching instructions are dispatching instructions for storing certificates. The distribution of vacant storage slots in the storage bin is obtained, and slot information is selected from areas where the vacant storage slots are densely distributed. For example, there are 100 storage slots in the storage bin, there are 20 empty storage slots on the left side of the storage bin, and 10 empty storage slots on the right side, so the selection on the left side of the storage bin corresponds to 5 Based on the storage slots corresponding to the scheduling instructions for storing credentials, obtain the slot information of these storage slots. When selecting the target station in this way, the target station is also selected from the candidate stations near the area where the vacant storage slots are densely distributed.
通过上述描述可知,在本实施例中在预设间隔时长内接收多个调度指令,根据这些多个调度指令,这些调度指令对应的存储槽位尽量靠近,位于同一个区域,这样可以有效减少机械手完成这些调度指令对应的工作任务时的行程,有效提升证件存取的效率,降低资源消耗。From the above description, it can be seen that in this embodiment, multiple scheduling commands are received within the preset interval. According to these multiple scheduling commands, the storage slots corresponding to these scheduling commands are as close as possible and located in the same area, which can effectively reduce the number of manipulators. The itinerary when completing the work tasks corresponding to these scheduling instructions can effectively improve the efficiency of document access and reduce resource consumption.
请参阅图5,图5是本发明提供的证件存取方法的第四实施例的流程示意图。本发明提供的证件存取方法包括如下步骤:Please refer to FIG. 5 . FIG. 5 is a schematic flowchart of a fourth embodiment of the certificate access method provided by the present invention. The certificate access method provided by the present invention includes the following steps:
S401:获取运载机器人的运行参数,根据运行参数获取运载机器人的优先级,运行参数包括运行轨迹、运行速度、运行加速度、已运行时长中的至少一项。S401: Obtain the operating parameters of the carrying robot, and obtain the priority of the carrying robot according to the operating parameters, where the operating parameters include at least one of operating trajectory, operating speed, operating acceleration, and elapsed operating time.
在一个具体的实施场景中,当多个运载机器人运动时,可能会出现多个运载机器人需要同时通过一个路口的情况,如果不对运载机器人的运动进行规划,可能出现碰撞情况,导致运载机器人受损,且证件存取任务无法完成。因此可以预先给每个运载机器人按照一定的规则赋予运动优先级。具有更高优先级的运载机器人优先通过路口。In a specific implementation scenario, when multiple delivery robots are moving, multiple delivery robots may need to pass through an intersection at the same time. If the movement of the delivery robots is not planned, collisions may occur, resulting in damage to the delivery robots , and the credential access task cannot be completed. Therefore, each carrier robot can be given a motion priority in advance according to certain rules. The delivery robot with higher priority will pass through the intersection first.
在本实施场景中,获取运载机器人的运行参数,运行参数包括运行轨迹、运行速度、运行加速度、已运行时长中的至少一项。根据运行参数获取运载机器人的运动优先级,例如,运行速度越快的运载机器人运动优先级越高,已运行时长越长的运载机器人的优先级越高,用于提取证件的运载机器人的运动优先级高于用于存储证件的运载机器人,剩余运动距离越短的运载机器人的运动优先级越高。In this implementation scenario, the operating parameters of the carrying robot are obtained, and the operating parameters include at least one of the operating trajectory, operating speed, operating acceleration, and elapsed operating time. Obtain the movement priority of the delivery robot according to the running parameters, for example, the faster the movement speed of the delivery robot, the higher the movement priority, the longer the running time, the higher the priority of the delivery robot, and the movement priority of the delivery robot used to extract the certificate The level is higher than the delivery robot used to store documents, and the movement priority of the delivery robot with the shorter remaining movement distance is higher.
以上运行参数的可选实施例可做组合,例如分别判断运行轨迹和运行速度,两者做结合得到运行速度快和运行轨迹简单的运载机器人作为的优先级高的运载机器人。The optional embodiments of the above operating parameters can be combined, such as judging the running track and running speed separately, and combining the two to obtain a carrier robot with a fast running speed and a simple running track as a carrier robot with high priority.
S402:当至少两辆运载机器人同时到达路口时,驱动至少两辆运载机器人按照优先级从高到低的顺序依次通过路口。S402: When at least two delivery robots arrive at the intersection at the same time, drive the at least two delivery robots to pass through the intersection in order of priority from high to low.
在一个具体的实施场景中,当至少两辆运载机器人同时到达路口时,驱动至少两辆运载机器人按照优先级从高到低的顺序依次通过路口。若至少两辆运载机器人的运动方向相反,则按照运动优先级从高到低的顺序,驱动至少两辆目标小车依次通过路口。In a specific implementation scenario, when at least two delivery robots arrive at the intersection at the same time, at least two delivery robots are driven to pass through the intersection in order of priority from high to low. If the movement directions of at least two carrying robots are opposite, at least two target cars are driven through the intersection in sequence according to the order of movement priority from high to low.
若至少两辆目标小车的运动方向相同,则根据优先级调整每辆运载机器人的速度,增大运动优先级较高的运载机器人的速度,降低运动优先级较低的运载机器人的速度,从而运动优先级较高的运载机器人先通过路口。If at least two target cars move in the same direction, adjust the speed of each robot according to the priority, increase the speed of the robot with higher priority, and reduce the speed of the robot with lower priority, so that The delivery robot with higher priority passes through the intersection first.
通过上述描述可知,在本实施例中获取运载机器人的运行参数,根据运行参数获取运载机器人的运动优先级,当至少两辆运载机器人同时到达路口时,驱动至少两辆运载机器人按照运动优先级从高到低的顺序依次通过路口,可以避免出现运载机器人的碰撞和拥堵的情况,确保证件存储人任务顺利完成。It can be seen from the above description that in this embodiment, the operating parameters of the carrier robots are obtained, and the motion priorities of the carrier robots are obtained according to the operating parameters. When at least two carrier robots arrive at the intersection at the same time, at least two carrier robots are driven from Passing through the intersection in order from high to low can avoid collisions and congestion of the carrying robot and ensure the smooth completion of the document storage task.
请结合参阅图6,图6是本发明提供的证件存取设备的一实施例的结构示意图。证件存取设备20包括图1中所示的存储仓,还包括如下模块:指令模块21、选取模块22和生成模块23。Please refer to FIG. 6 in conjunction with FIG. 6 , which is a schematic structural diagram of an embodiment of a certificate access device provided by the present invention. The
指令模块21用于获取调度指令,调度指令包括提取证件的证件信息或存储证件的证件信息;选取模块22用于根据调度指令选取与证件信息匹配的槽位信息,获取邻近槽位信息的多个待选工位,获取每个待选工位的占用信息,根据占用信息从多个待选工位中选出目标工位;生成模块23用于根据目标工位生成指示指令,指示指令用于指示运载机器人运动至目标工位。The
选取模块22还用于获取邻近多个待选工位的机械手的状态信息,根据状态信息和占用信息选出目标工位。The
状态信息包括空闲状态、工作状态以及故障状态;选取模块22还用于按照空闲状态、工作状态以及故障状态依次筛选机械手,并得到多个工位的使用优先级信息;根据使用优先级信息和占用信息确定目标工位。The status information includes idle state, working state and fault state; the
选取模块22还用于当机械手均处于工作状态时,获取运载机器人到达每个机械手对应的待选工位的运动时长,将最长的运动时长对应的待选工位作为目标工位。The
指令模块21还用于在预设间隔时长内接收多个调度指令;选取模块22还用于当多个调度指令中存在用于提取证件的调度指令时,获取待提取的证件的存储信息,根据存储信息和占用信息获取槽位信息;当多个调度指令均为用于存储证件的调度指令时,获取存储仓中的待选槽位分布情况,从待选槽位分布密集的区域中选出槽位信息。The
指令模块21还用于当多个调度指令中存在多个用于提取证件的调度指令时,获取每一个用于提取证件的调度指令对应的待提取的证件的存储信息;获取存储信息在存储仓中的存储槽位分布情况,从存储信息分布密集的区域对应的待选工位中根据占用信息选出目标工位。The
证件存取设备20还包括优先级模块24,优先级模块24还用于获取运载机器人的运行参数,根据运行参数获取运载机器人的运动优先级,运行参数包括运行轨迹、运行速度、运行加速度、已运行时长中的至少一项;当至少两辆运载机器人同时到达路口时,驱动至少两辆运载机器人按照运动优先级从高到低的顺序依次通过路口。The
通过上述描述可知,在本实施例中证件存取设备根据用于存储证件或者提取证件的调度指令选取槽位信息,获取邻近槽位信息的待选工位,获取每个待选工位的占用信息,根据占用信息从待选工位中选出目标工位,根据目标工位生成指示指令,指示指令用于指示运载机器人运动至目标工位,从而能够实现证件的自动存取,有效降低人力成本,提升存取效率,避免存取失误,提升证件存取安全性。From the above description, it can be seen that in this embodiment, the certificate access device selects slot information according to the scheduling instruction for storing or extracting certificates, obtains the candidate stations adjacent to the slot information, and obtains the occupancy of each candidate station. Information, select the target station from the candidate stations according to the occupancy information, and generate instructions according to the target station. The instruction instruction is used to instruct the carrier robot to move to the target station, so as to realize the automatic access of certificates and effectively reduce manpower. Reduce costs, improve access efficiency, avoid access errors, and improve document access security.
图7是本发明提供的证件存取设备的一实施例的内部结构图。该证件存取设备具体可以是终端,也可以是系统。如图7所示,该证件存取设备包括通过系统总线连接的处理器、存储器和网络接口。其中,存储器包括非易失性存储介质和内存储器。该证件存取设备的非易失性存储介质存储有操作系统,还可存储有计算机程序,该计算机程序被处理器执行时,可使得处理器实现年龄识别方法。该内存储器中也可储存有计算机程序,该计算机程序被处理器执行时,可使得处理器执行年龄识别方法。本领域技术人员可以理解,图7中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。Fig. 7 is an internal structure diagram of an embodiment of the certificate access device provided by the present invention. Specifically, the credential access device may be a terminal or a system. As shown in Fig. 7, the credential access device includes a processor, a memory and a network interface connected through a system bus. Wherein, the memory includes a non-volatile storage medium and an internal memory. The non-volatile storage medium of the credential access device stores an operating system and also stores a computer program. When the computer program is executed by the processor, the processor can realize the age identification method. A computer program may also be stored in the internal memory, and when the computer program is executed by the processor, the processor may execute the age identification method. Those skilled in the art can understand that the structure shown in Figure 7 is only a block diagram of a part of the structure related to the solution of this application, and does not constitute a limitation to the computer equipment on which the solution of this application is applied. The specific computer equipment can be More or fewer components than shown in the figures may be included, or some components may be combined, or have a different arrangement of components.
在一个实施例中,提出了一种证件存取设备,包括存储器和处理器,存储器存储有计算机程序,计算机程序被处理器执行时,使得处理器执行图2-图5中任意一个所示的步骤。In one embodiment, a credential access device is proposed, which includes a memory and a processor, the memory stores a computer program, and when the computer program is executed by the processor, the processor executes the process shown in any one of Figures 2-5. step.
在一个实施例中,提出了一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时,使得处理器执行图2-图5中任意一个所示的步骤。In one embodiment, a computer-readable storage medium is provided, which stores a computer program. When the computer program is executed by a processor, the processor executes the steps shown in any one of FIGS. 2-5 .
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,的程序可存储于一非易失性计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态 RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率 SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink) DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。Those of ordinary skill in the art can understand that all or part of the processes in the methods of the above embodiments can be implemented through computer programs to instruct related hardware, and the programs can be stored in a non-volatile computer-readable storage medium. When the program is executed, it may include the procedures of the embodiments of the above-mentioned methods. Wherein, any references to memory, storage, database or other media used in the various embodiments provided in the present application may include non-volatile and/or volatile memory. Nonvolatile memory can include read only memory (ROM), programmable ROM (PROM), electrically programmable ROM (EPROM), electrically erasable programmable ROM (EEPROM), or flash memory. Volatile memory can include random access memory (RAM) or external cache memory. By way of illustration and not limitation, RAM is available in many forms such as Static RAM (SRAM), Dynamic RAM (DRAM), Synchronous DRAM (SDRAM), Double Data Rate SDRAM (DDRSDRAM), Enhanced SDRAM (ESDRAM), Synchronous Chain Synchlink DRAM (SLDRAM), memory bus (Rambus) direct RAM (RDRAM), direct memory bus dynamic RAM (DRDRAM), and memory bus dynamic RAM (RDRAM), etc.
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。The technical features of the above embodiments can be combined arbitrarily. To make the description concise, all possible combinations of the technical features in the above embodiments are not described. However, as long as there is no contradiction in the combination of these technical features, they should be It is considered to be within the range described in this specification.
以上实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。The above examples only express several implementation modes of the present application, and the description thereof is relatively specific and detailed, but should not be construed as limiting the patent scope of the present application. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present application, and these all belong to the protection scope of the present application. Therefore, the scope of protection of the patent application should be based on the appended claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211047892.1ACN115469655B (en) | 2022-08-30 | 2022-08-30 | A certificate storage method, device and computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211047892.1ACN115469655B (en) | 2022-08-30 | 2022-08-30 | A certificate storage method, device and computer-readable storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115469655Atrue CN115469655A (en) | 2022-12-13 |
| CN115469655B CN115469655B (en) | 2025-06-20 |
Family
ID=84368427
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211047892.1AActiveCN115469655B (en) | 2022-08-30 | 2022-08-30 | A certificate storage method, device and computer-readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115469655B (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3538720A1 (en)* | 1985-10-31 | 1987-05-07 | Kristoph Schoenberg | Machining station |
| CN106897752A (en)* | 2017-02-07 | 2017-06-27 | 武汉天恒信息技术有限公司 | A kind of self-service equipment and the self-service evidence collecting method of issuing licence of license |
| CN110059926A (en)* | 2019-03-15 | 2019-07-26 | 北京旷视机器人技术有限公司 | Sort dispatching method, device, warehousing system and readable storage medium storing program for executing |
| CN110858073A (en)* | 2018-08-06 | 2020-03-03 | 北京京东尚科信息技术有限公司 | Dispatching method and dispatching device for automatic guided transport vehicle |
| CN112633756A (en)* | 2020-12-30 | 2021-04-09 | 深圳市人工智能与机器人研究院 | Warehouse logistics scheduling method and related equipment |
| CN113744560A (en)* | 2021-09-15 | 2021-12-03 | 厦门科拓通讯技术股份有限公司 | Automatic parking method and device for parking lot, server and machine-readable storage medium |
| CN215885426U (en)* | 2021-07-15 | 2022-02-22 | 深圳市雄帝科技股份有限公司 | Certificate lifting access device and certificate access equipment thereof |
- 2022
- 2022-08-30CNCN202211047892.1Apatent/CN115469655B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3538720A1 (en)* | 1985-10-31 | 1987-05-07 | Kristoph Schoenberg | Machining station |
| CN106897752A (en)* | 2017-02-07 | 2017-06-27 | 武汉天恒信息技术有限公司 | A kind of self-service equipment and the self-service evidence collecting method of issuing licence of license |
| CN110858073A (en)* | 2018-08-06 | 2020-03-03 | 北京京东尚科信息技术有限公司 | Dispatching method and dispatching device for automatic guided transport vehicle |
| CN110059926A (en)* | 2019-03-15 | 2019-07-26 | 北京旷视机器人技术有限公司 | Sort dispatching method, device, warehousing system and readable storage medium storing program for executing |
| CN112633756A (en)* | 2020-12-30 | 2021-04-09 | 深圳市人工智能与机器人研究院 | Warehouse logistics scheduling method and related equipment |
| CN215885426U (en)* | 2021-07-15 | 2022-02-22 | 深圳市雄帝科技股份有限公司 | Certificate lifting access device and certificate access equipment thereof |
| CN113744560A (en)* | 2021-09-15 | 2021-12-03 | 厦门科拓通讯技术股份有限公司 | Automatic parking method and device for parking lot, server and machine-readable storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115469655B (en) | 2025-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6924804B2 (en) | Picking scheduling method, equipment, storage system and readable storage medium | |
| JP7498858B2 (en) | Order processing and delivery method, equipment, system, and storage medium | |
| CN111311116B (en) | Intelligent park-based vehicle scheduling method, device, equipment and storage medium | |
| KR102080424B1 (en) | Method and apparatus for robotic site return | |
| Guo et al. | Dynamic yard crane dispatching in container terminals with predicted vehicle arrival information | |
| Guo et al. | Gantry crane scheduling in intermodal rail-road container terminals | |
| CN113283838B (en) | Inventory scheduling method, equipment and system | |
| CN111401735A (en) | Intelligent queuing method, device, equipment and storage medium for logistics vehicles | |
| CN112936285B (en) | Local delivery method, medium and device of robot and robot | |
| CN110298481B (en) | Vehicle rescue method, device, computer equipment and storage medium | |
| US11537967B2 (en) | Method for processing item sorting scheduling request, and related device | |
| CN115744014A (en) | Roadway storage management method, system and equipment | |
| Bahrami et al. | Autonomous vehicle relocation problem in a parking facility | |
| CN115469655A (en) | A certificate storage method, device and computer-readable storage medium | |
| WO2022068935A1 (en) | Elevator resource scheduling method and apparatus | |
| CN111832894B (en) | Vehicle dispatching mode generation method, device and computer storage medium | |
| CN112116231A (en) | Scheduling method and device of Internet of things equipment and server | |
| Roy et al. | Optimal design of container terminal layout | |
| CN117893110A (en) | Dispatching method of distribution robot, distribution equipment and storage medium | |
| TW202008239A (en) | Site returning method and device for robots capable of ensuring that the currently idle robots leave the site in an orderly manner after delivery of goods | |
| US11113777B1 (en) | Techniques for detecting and managing congestion within a workspace | |
| CN114529187A (en) | Distribution task resource scheduling method, system, electronic equipment and storage medium | |
| US20250145193A1 (en) | System and method for intelligently diffusing unit storage across parking lot resources to maximize unit throughput in a hub based on a dual-stream resource optimization | |
| US20250145194A1 (en) | System and method for managing hostler-aided multi-hop operations to repair deviations in execution of optimized operating schedules associated with a hub | |
| CN116909230A (en) | Method, device, equipment and storage medium for distributing transport tasks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |