CN115399839A - Information processing method and related device - Google Patents
Information processing method and related deviceDownload PDFInfo
- Publication number
- CN115399839A CN115399839ACN202111599307.4ACN202111599307ACN115399839ACN 115399839 ACN115399839 ACN 115399839ACN 202111599307 ACN202111599307 ACN 202111599307ACN 115399839 ACN115399839 ACN 115399839A
- Authority
- CN
- China
- Prior art keywords
- coordinates
- moments
- user
- moment
- markers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/108—Computer aided selection or customisation of medical implants or cutting guides
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本申请实施例涉及医学影像引导人体经皮穿刺领域,具体涉及信息处理方法及相关装置。The embodiment of the present application relates to the field of medical image-guided human percutaneous puncture, and specifically relates to an information processing method and related devices.
背景技术Background technique
穿刺是将穿刺针刺入体腔抽取分泌物做化验,或者向体腔注入气体或造影剂做造影检查,或者向体腔内注入药物的一种诊疗技术。对肺部的病灶,即疾病集中的部位或是综合病症、感染的主要部位,进行穿刺检查或治疗是一项典型操作。Puncture is a diagnosis and treatment technique in which a puncture needle is inserted into a body cavity to extract secretions for laboratory tests, or to inject gas or contrast agent into the body cavity for contrast examination, or to inject drugs into the body cavity. It is a typical operation to perform puncture examination or treatment on the focus of the lung, that is, the part where the disease is concentrated or the main part of the syndrome or infection.
目前,临床上采用的方法主要依赖于医生的经验。例如,首先,医生凭经验在人体贴一些辅助定位的标记物进行计算机断层扫描(computed tomography,CT),得到扫描图像。再根据扫描图像上的标记物与病灶的距离和角度关系在皮肤上确定合适的入针点。然后,对穿刺入针位置进行标记后,根据入针点和病灶的位置之间的角度将穿刺针经过皮肤插入人体,每插入一段距离需要对穿刺位置进行一次CT扫描,从扫描图像上来判断入针角度和入针位置能否对齐病灶的位置。如果入针角度和入针位置不能对齐病灶的位置则需要拔出穿刺针重新调整入针角度,直至从扫描图像上看到穿刺针已到达病灶的位置。At present, the methods used clinically mainly rely on the experience of doctors. For example, firstly, a doctor sticks some auxiliary positioning markers on the human body to perform a computed tomography (CT) scan to obtain a scan image. Then determine the appropriate needle entry point on the skin according to the distance and angle relationship between the marker on the scanned image and the lesion. Then, after marking the position of the puncture needle, insert the puncture needle into the human body through the skin according to the angle between the needle entry point and the lesion position, and a CT scan of the puncture position is required for each insertion distance, and the incision can be judged from the scanned image. Whether the needle angle and needle insertion position can be aligned with the lesion. If the needle insertion angle and needle insertion position are not aligned with the lesion, the puncture needle needs to be pulled out and the needle insertion angle readjusted until the puncture needle has reached the lesion on the scanned image.
但是,患者的呼吸会造成病灶的位置和重要器官的移动,采用上述方法时,准确率低,穿刺花费的时间长。However, the patient's breathing will cause the location of the lesion and the movement of vital organs. When the above method is used, the accuracy rate is low and the puncture takes a long time.
发明内容Contents of the invention
本申请实施例提供了一种信息处理方法及相关装置,该方法可以辅助穿刺工具进行穿刺,从而提高准确率,节约穿刺花费的时间。The embodiment of the present application provides an information processing method and a related device. The method can assist a puncturing tool in puncturing, thereby improving accuracy and saving time spent on puncturing.
第一方面,本申请实施例提供了一种信息处理方法,包括:In the first aspect, the embodiment of the present application provides an information processing method, including:
将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标;该第一参考坐标与该标记物对应,该第一时刻为用户在第一状态时利用计算机断层扫描CT仪采集肺部CT图像的任意时刻,多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关;The first coordinates of each of the at least two markers at the first moment are used as the first reference coordinates; the first reference coordinates correspond to the markers, and the first moment is when the user is in the first state using computed tomography At any moment when the scanning CT instrument collects the lung CT image, the plurality of first coordinates corresponding to the plurality of first moments are related to the breathing amplitude of the user at the plurality of first moments;
获取该至少两个标记物中每个标记物在第二时刻的第二坐标;该第一时刻早于该第二时刻,且该用户在该第二时刻对应第二状态,多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关;Obtaining the second coordinates of each of the at least two markers at a second moment; the first moment is earlier than the second moment, and the user corresponds to a second state at the second moment, and a plurality of the second The plurality of second coordinates corresponding to the time are related to the breath amplitude of the user at the plurality of second moments;
在该至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件的情况下,输出第一提示信息。If the relationship between the second coordinates of each of the at least two markers and the corresponding first reference coordinates satisfies a preset condition, first prompt information is output.
在一种可能的实施方式中,该将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标之前,该方法还包括:In a possible implementation manner, before using the first coordinate of each of the at least two markers at the first moment as the first reference coordinate, the method further includes:
获取第一标记物在多个第三时刻对应的第三坐标;该第三时刻属于该用户进行CT过程中的时刻,该第一标记物为该至少两个标记物中的一个;Acquiring third coordinates corresponding to the first marker at multiple third moments; the third moment belongs to the moment when the user is performing CT, and the first marker is one of the at least two markers;
根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线;该第一呼吸曲线的横坐标用于表示该多个第三时刻,该第一呼吸曲线的纵坐标用于表示该用户在多个第三时刻的呼吸幅度;Determine the first respiration curve according to the third coordinates corresponding to the first marker at the multiple third moments; the abscissa of the first respiration curve is used to represent the multiple third moments, and the ordinate of the first respiration curve Used to indicate the breathing range of the user at multiple third moments;
该将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标,包括:The first coordinate of each marker in the at least two markers at the first moment is used as the first reference coordinate, including:
根据该第一呼吸曲线确定第一时间段;该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于第一阈值,且在该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于该第一阈值的情况下,该用户处于该第一状态;The first time period is determined according to the first respiration curve; the absolute value of the difference between the breathing amplitudes corresponding to any two moments in the first time period is less than or equal to the first threshold, and any time period in the first time period When the absolute value of the difference between the breathing amplitudes corresponding to two moments is less than or equal to the first threshold, the user is in the first state;
将至少两个标记物中每个标记物在该第一时间段内任一时刻的第三坐标作为该第一参考坐标。The third coordinate of each marker in the at least two markers at any time within the first time period is used as the first reference coordinate.
在一种可能的实施方式中,该根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线,包括:In a possible implementation manner, the determining the first respiratory curve according to the third coordinates corresponding to the first marker at the multiple third moments includes:
将该多个第三时刻中任一时刻对应的第三坐标作为第二参考坐标;taking the third coordinate corresponding to any one of the plurality of third moments as the second reference coordinate;
分别计算该多个第三时刻中其他时刻对应的第三坐标与该第二参考坐标之间的位移,该位移与该第三时刻对应;respectively calculating displacements between third coordinates corresponding to other moments in the multiple third moments and the second reference coordinates, the displacements corresponding to the third moments;
按照该多个第三时刻的先后顺序,将该位移绘制成第一曲线;drawing the displacement as a first curve according to the sequence of the plurality of third moments;
将该第一曲线进行归一化化处理得到的曲线作为该第一呼吸曲线。A curve obtained by performing normalization processing on the first curve is used as the first breathing curve.
在一种可能的实施方式中,该输出第一提示信息,包括:In a possible implementation manner, the outputting the first prompt information includes:
获取第一器件的第四坐标;该第四坐标为该第一器件的第一结构的坐标,该第四坐标采用的坐标系与该标记物采用相同的坐标系;Obtaining the fourth coordinate of the first device; the fourth coordinate is the coordinate of the first structure of the first device, and the coordinate system adopted by the fourth coordinate is the same coordinate system adopted by the marker;
在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息,该第三参考坐标根据该用户在该第一状态时采集的该肺部CT图像确定。In the case that the distance between the fourth coordinate and the third reference coordinate is less than or equal to the second threshold, the first prompt information is output, and the third reference coordinate is based on the lung CT collected by the user in the first state. Image OK.
在一种可能的实施方式中,该输出第一提示信息之前,该方法还包括:In a possible implementation manner, before outputting the first prompt information, the method further includes:
获取第一模型;该第一模型由使用图像分割算法对该用户在该第一状态时采集的该肺部CT图像进行建模得到;该第一模型用于重建该用户的内部器官以及第一目标的位置;Acquiring a first model; the first model is obtained by using an image segmentation algorithm to model the lung CT image collected by the user in the first state; the first model is used to reconstruct the user's internal organs and the first the location of the target;
将该第一模型中的第一位置对应的坐标作为该第三参考坐标;该第一位置根据该用户的内部器官以及第一目标的位置确定,该第一模型与该标记物采用相同的坐标系。The coordinates corresponding to the first position in the first model are used as the third reference coordinates; the first position is determined according to the internal organs of the user and the position of the first target, and the first model and the marker adopt the same coordinates Tie.
在一种可能的实施方式中,该方法还包括:In a possible implementation manner, the method also includes:
获取该第一器件的第一角度;acquiring a first angle of the first device;
在该第一角度指向该第一目标的位置的情况下,输出第二提示信息。In the case that the first angle points to the position of the first target, second prompt information is output.
第二方面,本申请实施例提供了一种信息处理装置,包括:In a second aspect, an embodiment of the present application provides an information processing device, including:
确定单元,用于将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标;该第一参考坐标与该标记物对应,该第一时刻为用户在第一状态时利用计算机断层扫描CT仪采集肺部CT图像的任意时刻,多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关;The determination unit is configured to use the first coordinates of each of the at least two markers at the first moment as the first reference coordinates; the first reference coordinates correspond to the markers, and the first moment is the user at the first moment In the state, at any time when the computed tomography CT instrument is used to collect lung CT images, the plurality of first coordinates corresponding to the plurality of first moments are related to the breathing amplitude of the user at the plurality of first moments;
获取单元,用于获取该至少两个标记物中每个标记物在第二时刻的第二坐标;该第一时刻早于该第二时刻,且该用户在该第二时刻对应第二状态,多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关;an acquisition unit, configured to acquire the second coordinates of each of the at least two markers at a second moment; the first moment is earlier than the second moment, and the user corresponds to a second state at the second moment, The plurality of second coordinates corresponding to the plurality of second moments are related to the breathing range of the user at the plurality of second moments;
输出单元,用于在该至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件的情况下,输出第一提示信息。The output unit is configured to output first prompt information when the relationship between the second coordinates of each of the at least two markers and the corresponding first reference coordinates satisfies a preset condition.
在一种可能的实施方式中,该获取单元,还用于获取第一标记物在多个第三时刻对应的第三坐标;该第三时刻属于该用户进行CT过程中的时刻,该第一标记物为该至少两个标记物中的一个;In a possible implementation manner, the acquiring unit is further configured to acquire third coordinates corresponding to the first marker at multiple third moments; the third moments belong to the moment when the user is performing CT, and the first the marker is one of the at least two markers;
该确定单元,还用于根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线;该第一呼吸曲线的横坐标用于表示该多个第三时刻,该第一呼吸曲线的纵坐标用于表示该用户在多个第三时刻的呼吸幅度;The determining unit is further configured to determine a first respiration curve according to the third coordinates corresponding to the first marker at the multiple third moments; the abscissa of the first respiration curve is used to represent the multiple third moments, the The ordinate of the first breathing curve is used to represent the breathing range of the user at multiple third moments;
该确定单元,具体用于根据该第一呼吸曲线确定第一时间段;该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于第一阈值,且在该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于该第一阈值的情况下,该用户处于该第一状态;The determining unit is specifically configured to determine a first time period according to the first respiration curve; the absolute value of the difference between the breathing amplitudes corresponding to any two moments within the first time period is less than or equal to a first threshold, and in the first time period If the absolute value of the difference between the breathing amplitudes corresponding to any two moments within the first time period is less than or equal to the first threshold, the user is in the first state;
该确定单元,具体用于将至少两个标记物中每个标记物在该第一时间段内任一时刻的第三坐标作为该第一参考坐标。The determining unit is specifically configured to use the third coordinate of each marker in the at least two markers at any moment within the first time period as the first reference coordinate.
在一种可能的实施方式中,该确定单元,具体用于将该多个第三时刻中任一时刻对应的第三坐标作为第二参考坐标;In a possible implementation manner, the determining unit is specifically configured to use the third coordinate corresponding to any one of the plurality of third moments as the second reference coordinate;
该装置还包括计算单元,用于分别计算该多个第三时刻中其他时刻对应的第三坐标与该第二参考坐标之间的位移,该位移与该第三时刻对应;The device also includes a calculation unit, configured to calculate displacements between third coordinates corresponding to other moments in the plurality of third moments and the second reference coordinates, the displacements corresponding to the third moments;
该装置还包括绘制单元,用于按照该多个第三时刻的先后顺序,将该位移绘制成第一曲线;The device also includes a drawing unit, configured to draw the displacement as a first curve according to the sequence of the plurality of third moments;
该确定单元,具体用于将该第一曲线进行归一化化处理得到的曲线作为该第一呼吸曲线。The determining unit is specifically configured to use a curve obtained by performing normalization processing on the first curve as the first breathing curve.
在一种可能的实施方式中,该获取单元,还用于获取第一器件的第四坐标;该第四坐标为该第一器件的第一结构的坐标,该第四坐标采用的坐标系与该标记物采用相同的坐标系;In a possible implementation manner, the obtaining unit is also used to obtain the fourth coordinates of the first device; the fourth coordinates are the coordinates of the first structure of the first device, and the coordinate system adopted by the fourth coordinates is the same as The markers use the same coordinate system;
该输出单元,具体用于在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息,该第三参考坐标根据该用户在该第一状态时采集的该肺部CT图像确定。The output unit is specifically configured to output first prompt information when the distance between the fourth coordinate and the third reference coordinate is less than or equal to a second threshold, and the third reference coordinate is based on the user being in the first state The CT images of the lungs collected at that time were determined.
在一种可能的实施方式中,该获取单元,还用于获取第一模型;该第一模型由使用图像分割算法对该用户在该第一状态时采集的该肺部CT图像进行建模得到;该第一模型用于重建该用户的内部器官以及第一目标的位置;In a possible implementation manner, the acquiring unit is further configured to acquire a first model; the first model is obtained by using an image segmentation algorithm to model the CT image of the lungs acquired by the user in the first state ; The first model is used to reconstruct the user's internal organs and the position of the first target;
该确定单元,具体用于将该第一模型中的第一位置对应的坐标作为该第三参考坐标;该第一位置根据该用户的内部器官以及第一目标的位置确定,该第一模型与该标记物采用相同的坐标系。The determining unit is specifically configured to use the coordinates corresponding to the first position in the first model as the third reference coordinates; the first position is determined according to the internal organs of the user and the position of the first target, and the first model and The markers use the same coordinate system.
在一种可能的实施方式中,该获取单元,还用于获取该第一器件的第一角度;In a possible implementation manner, the acquiring unit is further configured to acquire a first angle of the first device;
该输出单元,还用于在该第一角度指向该第一目标的位置的情况下,输出第二提示信息。The output unit is further configured to output second prompt information when the first angle points to the position of the first target.
第三方面,本申请实施例公开了一种电子设备,包括:处理器和存储器,其中,该存储器中存储有计算机程序,该处理器调用该存储器中存储的计算机程序,用于执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。In a third aspect, the embodiment of the present application discloses an electronic device, including: a processor and a memory, wherein a computer program is stored in the memory, and the processor invokes the computer program stored in the memory to execute the first aspect or the method in any possible implementation manner of the first aspect.
第四方面,本申请还提供了另一种电子设备,包括:处理器、发送装置、输入装置、输出装置和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述处理器执行所述计算机指令的情况下,所述电子设备执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。In a fourth aspect, the present application also provides another electronic device, including: a processor, a sending device, an input device, an output device, and a memory, the memory is used to store computer program codes, and the computer program codes include computer instructions, When the processor executes the computer instruction, the electronic device executes the first aspect or the method in any possible implementation manner of the first aspect.
第五方面,本申请实施例提供了一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,当该计算机程序在一个或多个处理器上运行时,使得如第一方面或者第一方面的任意一种可能的实施方式中的方法被执行。In the fifth aspect, the embodiment of the present application provides a computer-readable storage medium, the computer-readable storage medium stores a computer program, and when the computer program is run on one or more processors, as described in the first aspect Or the method in any possible implementation manner of the first aspect is executed.
第六方面,本申请实施例提供了一种计算机程序产品,该计算机程序产品包括程序指令,该程序指令当被处理器执行时使该处理器执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。In a sixth aspect, the embodiment of the present application provides a computer program product, the computer program product includes program instructions, and when the program instructions are executed by a processor, the processor executes any one of the first aspect or the first aspect. method in a possible implementation.
附图说明Description of drawings
为了更清楚地说明本申请实施例或背景技术中的技术方案,下面将对本申请实施例或背景技术中所需要使用的附图作简单的介绍。In order to more clearly illustrate the technical solutions in the embodiments of the present application or the background art, the following will briefly introduce the drawings that are required in the embodiments of the present application or the background art.
图1是本申请实施例提供的一种信息处理方法的流程示意图;FIG. 1 is a schematic flowchart of an information processing method provided in an embodiment of the present application;
图2是本申请实施例提供的一种确定标记物的坐标的场景示意图;Fig. 2 is a schematic diagram of a scene for determining the coordinates of markers provided by the embodiment of the present application;
图3是本申请实施例提供的一种呼吸曲线的示意图;Fig. 3 is a schematic diagram of a breathing curve provided by an embodiment of the present application;
图4是本申请实施例提供的一种穿刺针的示意图;Fig. 4 is a schematic diagram of a puncture needle provided in an embodiment of the present application;
图5是本申请实施例提供的一种确定呼吸门控参考数据的方法流程示意图;FIG. 5 is a schematic flow chart of a method for determining respiratory gating reference data provided by an embodiment of the present application;
图6是本申请实施例提供的另一种信息处理方法的流程示意图;FIG. 6 is a schematic flowchart of another information processing method provided by the embodiment of the present application;
图7是本申请实施例提供的一种信息处理装置的结构示意图;FIG. 7 is a schematic structural diagram of an information processing device provided in an embodiment of the present application;
图8是本申请实施例提供的另一种信息处理装置的结构示意图。FIG. 8 is a schematic structural diagram of another information processing device provided by an embodiment of the present application.
具体实施方式Detailed ways
本申请以下实施例中所使用的术语只是为了描述特定实施例的目的,而并非旨在作为对本申请的限制。如在本申请的说明书和所附权利要求书中所使用的那样,单数表达形式“一个”、“一种”、“上述”、“该”和“这一”旨在也包括复数表达形式,除非其上下文中明确地有相反指示。还应当理解,本申请中使用的术语“和/或”是指并包含一个或多个所列出项目的任何或所有可能组合。本申请的说明书、权利要求书及附图中的术语“第一”和“第二”等是用于区别不同对象,而不是用于描述特定顺序。The terms used in the following embodiments of the present application are only for the purpose of describing specific embodiments, and are not intended to limit the present application. As used in the specification and appended claims of this application, the singular expressions "a", "an", "above", "the" and "this" are intended to include the plural expressions as well, unless the context clearly dictates otherwise. It should also be understood that the term "and/or" as used in this application refers to and includes any and all possible combinations of one or more of the listed items. The terms "first" and "second" in the specification, claims and drawings of the present application are used to distinguish different objects, rather than to describe a specific order.
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以上述权利要求的保护范围为准。The above is only a specific implementation of the application, but the scope of protection of the application is not limited thereto. Anyone familiar with the technical field can easily think of changes or substitutions within the technical scope disclosed in the application. Should be covered within the protection scope of this application. Therefore, the protection scope of the present application should be based on the protection scope of the above claims.
肺部疾病是日常生活中的一种常见疾病。病灶,即疾病集中的部位或是综合病症、感染的主要部位,常常位于肺部内部或附近,需要医生将穿刺针刺入用户的身体内部抽取分泌物做化验,或者向身体内注入药物进行治疗。Lung disease is a common disease in everyday life. The lesion, that is, the concentrated part of the disease or the main part of the syndrome or infection, is often located in or near the lungs, requiring a doctor to insert a puncture needle into the user's body to extract secretions for testing, or to inject drugs into the body for treatment .
目前,临床上采用的方法主要依赖于医生的经验。例如,首先,医生凭经验在人体贴一些辅助定位的标记物进行CT,得到扫描图像。再根据扫描图像上的标记物与病灶的距离和角度关系在皮肤上确定合适的入针点。然后,对穿刺入针位置进行标记后,根据入针点和病灶的位置之间的角度将穿刺针经过皮肤插入人体,每插入一段距离需要对穿刺位置进行一次CT扫描,从扫描图像上来判断入针角度和入针位置能否对齐病灶的位置。如果入针角度和入针位置不能对齐病灶的位置则需要拔出穿刺针重新调整入针角度,直至从扫描图像上看到穿刺针已到达病灶的位置。At present, the methods used clinically mainly rely on the experience of doctors. For example, first of all, the doctor sticks some markers for auxiliary positioning on the human body and performs CT to obtain scanned images. Then determine the appropriate needle entry point on the skin according to the distance and angle relationship between the marker on the scanned image and the lesion. Then, after marking the position of the puncture needle, insert the puncture needle into the human body through the skin according to the angle between the needle entry point and the lesion position, and a CT scan of the puncture position is required for each insertion distance, and the incision can be judged from the scanned image. Whether the needle angle and needle insertion position can be aligned with the lesion. If the needle insertion angle and needle insertion position are not aligned with the lesion, the puncture needle needs to be pulled out and the needle insertion angle readjusted until the puncture needle has reached the lesion on the scanned image.
但是,肺部作为人类进行呼吸时必需的器官之一,上下起伏的呼吸动作会导致病灶的位置和身体内部器官的移动,采用上述方法时,准确率低,穿刺花费的时间长。However, the lung is one of the organs necessary for human breathing, and the ups and downs of the breathing action will cause the location of the lesion and the movement of the internal organs of the body. When the above method is used, the accuracy rate is low and the puncture takes a long time.
基于上述问题,本申请实施例提供了一种信息处理方法及相关装置,通过本申请的一些实施例,可以辅助穿刺工具进行穿刺,以提高准确率,节约穿刺花费的时间。可以理解的是,本申请实施例提供的信息处理方法可以由信息处理装置执行,其中,该信息处理装置可以是任一种可执行本申请方法实施例所公开的技术方案的电子设备。示例性地,该信息处理装置可以是计算机、平板电脑、台式电脑等。Based on the above problems, the embodiment of the present application provides an information processing method and a related device. Through some embodiments of the present application, the puncturing tool can be assisted in puncturing, so as to improve the accuracy and save the time spent on puncturing. It can be understood that the information processing method provided by the embodiment of the present application may be executed by an information processing device, where the information processing device may be any electronic device capable of executing the technical solutions disclosed in the method embodiment of the present application. Exemplarily, the information processing device may be a computer, a tablet computer, a desktop computer, and the like.
应理解,本申请提供的方法实施例还可以通过处理器执行计算机程序代码的方式实现。下面结合本申请实施例中的附图对本申请实施例进行描述。请参阅图1,图1是本申请实施例提供的一种信息处理方法的流程示意图,如图1所示,该方法包括:It should be understood that the method embodiments provided in this application may also be implemented by a processor executing computer program codes. Embodiments of the present application are described below with reference to the drawings in the embodiments of the present application. Please refer to FIG. 1. FIG. 1 is a schematic flow chart of an information processing method provided in an embodiment of the present application. As shown in FIG. 1, the method includes:
101:将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标;该第一参考坐标与该标记物对应,该第一时刻为用户在第一状态时利用计算机断层扫描CT仪采集肺部CT图像的任意时刻,多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关。101: Use the first coordinate of each of the at least two markers at the first moment as the first reference coordinate; the first reference coordinate corresponds to the marker, and the first moment is used by the user in the first state At any moment when the computed tomography CT instrument collects the CT images of the lungs, the plurality of first coordinates corresponding to the plurality of first moments are related to the breath amplitude of the user at the plurality of first moments.
本申请实施例中,标记物可以称为光学标记小球,或者反光标记物,或者反光标记点(mark点)等。标记物被布置在目标物上,并且可以借助电子设备获取到标记物的坐标,可以理解的是,该坐标可以称为空间坐标,或者三维坐标。In the embodiment of the present application, the marker may be called an optical marker ball, or a reflective marker, or a reflective mark point (mark point) and the like. The markers are arranged on the target, and the coordinates of the markers can be obtained by means of electronic equipment. It can be understood that the coordinates can be called spatial coordinates, or three-dimensional coordinates.
示例性地,在一种实现方式中,标记物与电源连接进行主动发光,进而可以通过光学相机获取标记物的空间位置,即坐标。在另一种实现方式中,可以在标记物的表面涂抹反光材料,反光材料可以反射红外光,在标记物反射的红外光被多个镜头上的感应器矩阵接收,就可以获取标记物的坐标。Exemplarily, in an implementation manner, the marker is connected to a power source to actively emit light, and then the spatial position of the marker, that is, the coordinates, can be obtained through an optical camera. In another implementation, a reflective material can be applied on the surface of the marker, and the reflective material can reflect infrared light. The infrared light reflected by the marker is received by the sensor matrix on multiple lenses, and the coordinates of the marker can be obtained. .
本申请实施例中,标记物的个数为至少两个,标记物被布置在用户的体表,例如肺部。为便于理解,请参阅图2,图2是本申请实施例提供的一种确定标记物的坐标的场景示意图。In the embodiment of the present application, there are at least two markers, and the markers are arranged on the user's body surface, such as the lungs. For ease of understanding, please refer to FIG. 2 , which is a schematic diagram of a scene for determining the coordinates of a marker provided in an embodiment of the present application.
如图2所示,201部分为用户,202部分为粘贴于用户201的肺部体表的标记物,图2示例性地示出12个标记物。203部分为光学标记跟踪系统,光学标记跟踪系统203可以对标记物进行扫描,从而确定标记物的三维坐标数据。示例性地,光学标记跟踪系统203可以将自身的扫描口作为坐标原点,从而确定每个扫描到的标记物的三维坐标数据。As shown in FIG. 2 ,
本申请实施例中,该第一时刻为用户在第一状态时利用计算机断层扫描CT仪采集肺部CT图像的任意时刻。可以理解的是,CT仪是利用射线穿过不同组织后的强度差异得到CT图像的一种设备,用户在进行CT时为了得到清晰的CT图像会进行一段时间的憋气,该第一状态可以理解为用户进行憋气的状态。另外,由于憋气并不是瞬时的,而是连续的,且在憋气时间段内用户几乎没有呼吸幅度,可以认为用户在该第一状态下的状态是相同的,因此,该第一时刻可以理解为用户处于该第一状态的任意时刻。In the embodiment of the present application, the first moment is any moment when the user acquires a lung CT image with a computed tomography CT apparatus in the first state. It can be understood that a CT instrument is a device that obtains CT images by using the difference in intensity of rays passing through different tissues. Users will hold their breath for a period of time in order to obtain a clear CT image during CT. This first state is understandable. The breath-holding state for the user. In addition, since holding breath is not instantaneous but continuous, and the user has almost no breathing range during the breath holding time period, it can be considered that the state of the user in the first state is the same, therefore, the first moment can be understood as Any time the user is in the first state.
本申请实施例中,信息处理装置将每个标记物在该第一时刻的第一坐标作为第一参考坐标,该第一参考坐标与该标记物对应。可以理解的是,不同的标记物在该第一时刻的坐标被作为第一参考坐标,因此,任一个第一参考坐标与在第一时刻被采集该第一参考坐标的标记物相关联,即该第一参考坐标与该标记物对应。In the embodiment of the present application, the information processing device uses the first coordinate of each marker at the first moment as the first reference coordinate, and the first reference coordinate corresponds to the marker. It can be understood that the coordinates of different markers at the first moment are used as the first reference coordinates, therefore, any first reference coordinate is associated with the marker whose first reference coordinates are collected at the first moment, that is, The first reference coordinate corresponds to the marker.
以至少两个标记物为3个标记物为例,该3个标记物为标记物A,标记物B和标记物C,在第一时刻,标记物A的坐标为[A1,A2,A3],标记物B的坐标为[B1,B2,B3]和标记物C的坐标为[C1,C2,C3]。因此,坐标[A1,A2,A3]、[B1,B2,B3]和[C1,C2,C3]均为第一参考坐标,且第一参考坐标[A1,A2,A3]与标记物A对应,第一参考坐标[B1,B2,B3]与标记物B对应,第一参考坐标[C1,C2,C3]与标记物C对应。Taking at least two markers as three markers as an example, the three markers are marker A, marker B and marker C. At the first moment, the coordinates of marker A are [A1, A2, A3] , marker B has coordinates [B1,B2,B3] and marker C has coordinates [C1,C2,C3]. Therefore, the coordinates [A1,A2,A3], [B1,B2,B3] and [C1,C2,C3] are the first reference coordinates, and the first reference coordinates [A1,A2,A3] correspond to marker A , the first reference coordinates [B1, B2, B3] correspond to marker B, and the first reference coordinates [C1, C2, C3] correspond to marker C.
本申请实施例中,多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关。可以理解的是,用户的呼吸是随着时间进行的,不同时刻下用户有不同的呼吸幅度,而不同的呼吸幅度会导致标记物的坐标发生变化。另外,即使用户处于第一状态,标记物的坐标也可以发生微小的变化。因此,多个该第一时刻对应的多个该第一坐标可以反映用户在多个该第一时刻的呼吸幅度。In the embodiment of the present application, the plurality of first coordinates corresponding to the plurality of first moments are related to the breathing range of the user at the plurality of first moments. It can be understood that the breathing of the user progresses with time, and the user has different breathing amplitudes at different moments, and different breathing amplitudes will cause changes in the coordinates of the markers. In addition, even if the user is in the first state, the coordinates of the marker may change slightly. Therefore, the plurality of first coordinates corresponding to the plurality of first moments may reflect the breathing range of the user at the plurality of first moments.
102:获取该至少两个标记物中每个标记物在第二时刻的第二坐标;该第一时刻早于该第二时刻,且该用户在该第二时刻对应第二状态,多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关。102: Obtain the second coordinates of each of the at least two markers at a second moment; the first moment is earlier than the second moment, and the user corresponds to the second state at the second moment, and a plurality of the The plurality of second coordinates corresponding to the second moment are related to the breath amplitude of the user at the plurality of second moments.
本申请实施例中,该第二时刻为该第一时刻之后的时刻。由于该第一时刻可以理解为用户处于该第一状态的任意时刻,该第一状态可以理解为用户进行憋气的状态,该第二时刻可以理解为在用户结束憋气后,处于自由呼吸状态下的任一时刻,因此,第二状态可以理解为用户进行自由呼吸的状态。In this embodiment of the present application, the second moment is a moment after the first moment. Since the first moment can be understood as any moment when the user is in the first state, the first state can be understood as the state where the user is holding their breath, and the second moment can be understood as the state where the user is in a free breathing state after the user finishes holding his breath. At any moment, therefore, the second state can be understood as a state where the user is breathing freely.
本申请实施例中,与步骤101类似,多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关。可以理解的是,在自由呼吸状态下,用户的呼吸是随着时间进行的,不同时刻下用户有不同的呼吸幅度,而不同的呼吸幅度会导致标记物的坐标发生变化。因此,多个该第二时刻对应的多个该第二坐标可以反映用户在多个该第二时刻的呼吸幅度。In the embodiment of the present application, similar to step 101, the plurality of second coordinates corresponding to the plurality of second moments are related to the breathing range of the user at the plurality of second moments. It can be understood that, in the free breathing state, the user's breathing progresses with time, and the user has different breathing amplitudes at different moments, and different breathing amplitudes will cause changes in the coordinates of the markers. Therefore, the plurality of second coordinates corresponding to the plurality of second moments may reflect the breathing range of the user at the plurality of second moments.
103:在该至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件的情况下,输出第一提示信息。103: Output first prompt information when the relationship between the second coordinates of each of the at least two markers and the corresponding first reference coordinates satisfies a preset condition.
可以理解的是,步骤101中每个第一参考坐标与标记物对应,步骤102中每个标记物与第二坐标对应。因此,对于任一个标记物,从步骤101可以确定该标记物的第一参考坐标,从步骤102可以确定在第二时刻的第二坐标。It can be understood that, in
在一种判断每个标记物的第二坐标与对应的第一参考坐标之间的关系是否满足预设条件的实现方式中,信息处理装置可以计算每个标记物对应的第二坐标和该标记物对应的第一参考坐标之间的距离,在每个标记物对应的第二坐标和该标记物对应的第一参考坐标之间的距离均小于第一阈值的情况下,确定满足预设条件。In an implementation manner of judging whether the relationship between the second coordinates of each marker and the corresponding first reference coordinates satisfies a preset condition, the information processing device may calculate the second coordinates corresponding to each marker and the marker If the distance between the first reference coordinates corresponding to each marker is less than the first threshold, it is determined that the preset condition is met .
可以理解的是,该第一阈值可以根据实际情况进行确定,例如该第一阈值可以为1厘米,0.5厘米等,本申请对此不作限定。It can be understood that the first threshold may be determined according to actual conditions, for example, the first threshold may be 1 cm, 0.5 cm, etc., which is not limited in the present application.
在另一种判断每个标记物的第二坐标与对应的第一参考坐标之间的关系是否满足预设条件的实现方式中,信息处理装置可以计算每个标记物对应的第二坐标和该标记物对应的第一参考坐标之间的距离,在至少两个标记物中超过第一比例的标记物对应的第二坐标和该标记物对应的第一参考坐标之间的距离均小于第一阈值的情况下,确定满足预设条件。In another implementation manner of judging whether the relationship between the second coordinates of each marker and the corresponding first reference coordinates satisfies a preset condition, the information processing device may calculate the second coordinates corresponding to each marker and the The distance between the first reference coordinates corresponding to the markers, the distance between the second coordinates corresponding to the markers exceeding the first ratio in at least two markers and the first reference coordinates corresponding to the markers are all smaller than the first In the case of the threshold value, it is determined that the preset condition is met.
可以理解的是,该第一比例可以根据实际情况进行确定,例如该第一比例可以为85%、90%等,本申请对此不作限定。It can be understood that the first ratio may be determined according to actual conditions, for example, the first ratio may be 85%, 90%, etc., which is not limited in the present application.
本申请实施例中,不限定输出该第一提示信息的方式。示例性地,信息处理装置可以通过语音的方式输出提示音;也可以通过图像的方式在显示屏上显示提示信息;还可以通过控制其他电子设备的震动来作为提示。示例性地,该提示信息可以用于提示用户的状态满足预设条件,可以进行穿刺操作等。In this embodiment of the present application, the manner of outputting the first prompt information is not limited. Exemplarily, the information processing device may output a prompt sound through voice; it may also display prompt information on a display screen through an image; it may also control the vibration of other electronic devices as a prompt. Exemplarily, the prompt information may be used to prompt the user that the state meets the preset condition, that the puncturing operation can be performed, and the like.
综上,本申请实施例中,将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标;该第一参考坐标与该标记物对应,该第一时刻为用户在第一状态时利用CT仪采集肺部CT图像的任意时刻,由于多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关,即标记物在多个第一时刻的坐标用于反映用户在该多个第一时刻的呼吸幅度,上述将每个标记物在第一时刻的第一坐标作为第一参考坐标可以理解为将用户在第一时刻的呼吸幅度作为参考。To sum up, in the embodiment of the present application, the first coordinate of each of the at least two markers at the first moment is used as the first reference coordinate; the first reference coordinate corresponds to the marker, and the first moment is When the user is in the first state, at any time when the CT instrument is used to collect lung CT images, since the multiple first coordinates corresponding to the multiple first moments are related to the breathing amplitude of the user at the multiple first moments, that is, mark The coordinates of the object at multiple first moments are used to reflect the breathing range of the user at the multiple first moments. The above-mentioned use of the first coordinates of each marker at the first moment as the first reference coordinates can be understood as taking the user at the first moment The breathing rate at a moment is used as a reference.
获取该至少两个标记物中每个标记物在第二时刻的第二坐标;该第一时刻早于该第二时刻,且该用户在该第二时刻对应第二状态,由于多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关,即标记物在多个第二时刻的坐标用于反映用户在该多个第二时刻的呼吸幅度,上述获取该至少两个标记物中每个标记物在第二时刻的第二坐标,可以理解为确定用户在第二状态下的呼吸幅度。Acquiring the second coordinates of each marker in the at least two markers at a second moment; the first moment is earlier than the second moment, and the user corresponds to the second state at the second moment, because a plurality of the first The plurality of second coordinates corresponding to the second moment are related to the breathing amplitude of the user at the plurality of second moments, that is, the coordinates of the marker at the plurality of second moments are used to reflect the breathing amplitude of the user at the plurality of second moments , the acquisition of the second coordinates of each of the at least two markers at the second moment can be understood as determining the breathing range of the user in the second state.
在每个标记物的第二坐标与该标记物在第一状态下的第一参考坐标之间的关系满足预设条件,即在用户的呼吸幅度与第一时刻对应的呼吸幅度接近的情况下,输出第一提示信息。此时用户的状态与获取CT图像的第一时刻的呼吸状态接近,输出第一提示信息以辅助穿刺进行穿刺可以降低呼吸带来的误差,从而提高准确率。The relationship between the second coordinates of each marker and the first reference coordinates of the marker in the first state satisfies a preset condition, that is, when the breathing amplitude of the user is close to the breathing amplitude corresponding to the first moment , output the first prompt message. At this time, the user's state is close to the respiratory state at the first moment when the CT image is acquired. Outputting the first prompt information to assist puncture can reduce the error caused by breathing, thereby improving the accuracy rate.
另外,相比于根据经验进行穿刺,通过CT仪来判断用户的当前状态是否与第一时刻的状态接近,通过标记物的坐标计算,在满足预设条件的情况下输出提示信息可以节约穿刺花费的时间。In addition, compared to performing puncture based on experience, the CT instrument is used to judge whether the user's current state is close to the state at the first moment, and through the coordinate calculation of the marker, outputting prompt information when the preset conditions are met can save puncture costs time.
在一些实施例中,上述将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标之前,该信息处理方法还包括:In some embodiments, before using the first coordinate of each of the at least two markers at the first moment as the first reference coordinate, the information processing method further includes:
获取第一标记物在多个第三时刻对应的第三坐标;该第三时刻属于该用户进行CT过程中的时刻,该第一标记物为该至少两个标记物中的一个;Acquiring third coordinates corresponding to the first marker at multiple third moments; the third moment belongs to the moment when the user is performing CT, and the first marker is one of the at least two markers;
根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线;该第一呼吸曲线的横坐标用于表示该多个第三时刻,该第一呼吸曲线的纵坐标用于表示该用户在多个第三时刻的呼吸幅度;Determine the first respiration curve according to the third coordinates corresponding to the first marker at the multiple third moments; the abscissa of the first respiration curve is used to represent the multiple third moments, and the ordinate of the first respiration curve Used to indicate the breathing range of the user at multiple third moments;
上述将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标,包括:The above uses the first coordinates of each of the at least two markers at the first moment as the first reference coordinates, including:
根据该第一呼吸曲线确定第一时间段;该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于第一阈值,且在该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于该第一阈值的情况下,该用户处于该第一状态;The first time period is determined according to the first respiration curve; the absolute value of the difference between the breathing amplitudes corresponding to any two moments in the first time period is less than or equal to the first threshold, and any time period in the first time period When the absolute value of the difference between the breathing amplitudes corresponding to two moments is less than or equal to the first threshold, the user is in the first state;
将至少两个标记物中每个标记物在该第一时间段内任一时刻的第三坐标作为该第一参考坐标。The third coordinate of each marker in the at least two markers at any time within the first time period is used as the first reference coordinate.
本实施例中,该第一标记物为该至少两个标记物中的一个,该第三时刻属于该用户进行CT过程中的时刻。可以理解的是,通过CT仪获取用户的CT图像需要一个时间段,该第三时刻为该时间段内的时刻。每个第三时刻采集一个第三坐标,可以理解为,每个第三时刻对应一个第三坐标。In this embodiment, the first marker is one of the at least two markers, and the third moment belongs to the moment when the user is performing CT. It can be understood that it takes a period of time to obtain the CT image of the user through the CT apparatus, and the third moment is a moment within the period of time. A third coordinate is collected at each third moment, which can be understood as that each third moment corresponds to a third coordinate.
本实施例不限定第三时刻的个数,即信息处理装置根据实际情况采集100个、或者200个、或者500个第三时刻的第三坐标。可以理解的是,在第三时刻的个数较少的情况下,信息处理装置可以尽量在用户处于第一状态下采集第三坐标,以便于分析用户在第一状态下的呼吸变化。在一些实施例中,信息处理装置可以在用户进行CT过程中一直采集第三坐标,以便于分析用户在整个过程中的呼吸变化。This embodiment does not limit the number of the third moment, that is, the information processing device collects 100, or 200, or 500 third coordinates at the third moment according to the actual situation. It can be understood that, when the number of third moments is small, the information processing device may try to collect the third coordinates when the user is in the first state, so as to analyze the breathing changes of the user in the first state. In some embodiments, the information processing device may collect the third coordinates all the time during the CT process of the user, so as to analyze the breathing changes of the user during the whole process.
在一些实施例中,上述根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线,包括:In some embodiments, the determination of the first respiratory curve according to the third coordinates corresponding to the first marker at the plurality of third moments includes:
将该多个第三时刻中任一时刻对应的第三坐标作为第二参考坐标;taking the third coordinate corresponding to any one of the plurality of third moments as the second reference coordinate;
分别计算该多个第三时刻中其他时刻对应的第三坐标与该第二参考坐标之间的位移,该位移与该第三时刻对应;respectively calculating displacements between third coordinates corresponding to other moments in the multiple third moments and the second reference coordinates, the displacements corresponding to the third moments;
按照该多个第三时刻的先后顺序,将该位移绘制成第一曲线;drawing the displacement as a first curve according to the sequence of the plurality of third moments;
将该第一曲线进行归一化化处理得到的曲线作为该第一呼吸曲线。A curve obtained by performing normalization processing on the first curve is used as the first breathing curve.
为便于理解,请参阅图3,图3是本申请实施例提供的一种呼吸曲线的示意图。如图3所示,图3中的曲线可以理解为该第一呼吸曲线,直角坐标系的横坐标表示时间,纵坐标表示呼吸幅度。For ease of understanding, please refer to FIG. 3 , which is a schematic diagram of a breathing curve provided by an embodiment of the present application. As shown in FIG. 3 , the curve in FIG. 3 can be understood as the first breathing curve, the abscissa of the Cartesian coordinate system represents time, and the ordinate represents breathing amplitude.
在一种可能的实现方式中,信息处理装置可以将任一标记物(如图2中202部分中的一个标记物)在任一时刻的坐标作为第二参考坐标。然后,计算其他时刻该标记物的坐标与第二参考坐标之间的位移,因此,每个位移与某个第三时刻关联,即该位移与该第三时刻对应。最后,根据位移大小绘制曲线,将该曲线归一化后可作为该第一呼吸曲线。In a possible implementation manner, the information processing device may use the coordinates of any marker (such as a marker in
可选地,信息处理装置可以将至少两个标记物中,受用户的呼吸影响较大的标记物作为第一标记物,使得该第一呼吸曲线更加清晰直观。示例性地,信息处理装置可以在获取每个标记物在多个第三时刻对应的第三坐标,计算每个标记物对应的第一位移,该第一位移为第一标记物的在多个第三时刻内的第三坐标之间的最大位移。最后,信息处理装置将第一位移最大的标记物的作为该第一标记物。Optionally, the information processing device may use the marker that is more affected by the user's breathing among the at least two markers as the first marker, so that the first breathing curve is clearer and more intuitive. Exemplarily, the information processing device may obtain the third coordinates corresponding to each marker at multiple third moments, and calculate the first displacement corresponding to each marker, and the first displacement is the first displacement of the first marker at multiple The maximum displacement between the third coordinates within the third moment. Finally, the information processing device takes the first marker with the largest displacement as the first marker.
可以理解的是,肺部上下起伏的呼吸动作会导致病灶的位置和身体内部器官的移动,如果用户正常呼吸进行CT,那么得到的影像数据常常会带有伪影,不利于确定病灶的准确位置。所以用户在进行CT时会有一段时间的憋气,憋气时,用户身体内部的器官基本稳定,得到的影像数据较清晰。It is understandable that the ups and downs of the lungs will cause the location of the lesion and the movement of the internal organs of the body. If the user performs CT with normal breathing, the obtained image data will often have artifacts, which is not conducive to determining the exact location of the lesion. . Therefore, the user will hold his breath for a period of time when performing CT. When holding his breath, the internal organs of the user's body are basically stable, and the obtained image data is relatively clear.
如图3所示,时刻ta和时刻tb之间的时间段t1可以理解为用户处于第一状态,即用户进行憋气的时间段,也可以理解为上述第一时间段,该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于第一阈值。As shown in Figure 3, the time periodt1 between the time ta and the time tb can be understood as the user is in the first state, that is, the time period when the user is holding their breath, and can also be understood as the above-mentioned first time period, the first The absolute value of the difference between the breathing amplitudes corresponding to any two moments in the time period is less than or equal to the first threshold.
可以理解的是,可以根据实际情况对该第一阈值进行设定。由于该第一曲线是归一化后的曲线,示例性地,该第一阈值可以是0.1,或者0.15,或者0.2等,本申请对此不作限定。It can be understood that the first threshold may be set according to actual conditions. Since the first curve is a normalized curve, for example, the first threshold may be 0.1, or 0.15, or 0.2, etc., which is not limited in the present application.
可以看出,在时间段t1内用户的呼吸幅度基本上保持不变,可以认为用户在憋气时间段内的呼吸幅度为固定值,因此,可以将至少两个标记物中每个标记物在该第一时间段内任一时刻的第三坐标作为该第一参考坐标。It can be seen that the breathing amplitude of the user remains basically unchanged in the time periodt1 , and it can be considered that the breathing amplitude of the user is a fixed value during the breath-holding time period. Therefore, each of the at least two markers can be set at The third coordinate at any moment within the first time period is used as the first reference coordinate.
本实施例中,通过贴在用户肺部体表的标记物在不同时刻的坐标来确定用户的呼吸幅度和呼吸变化,相比于通过呼吸面罩确定用户的呼吸幅度更加准确、稳定,由于确定的用户的呼吸状态(或者可以理解为呼吸曲线)更准确,可以进一步提高辅助穿刺工具进行穿刺的准确率。In this embodiment, the user's breathing range and breathing changes are determined by the coordinates of the markers attached to the user's lung surface at different times, which is more accurate and stable than determining the user's breathing range through a breathing mask. The user's breathing state (or can be understood as a breathing curve) is more accurate, which can further improve the accuracy of the auxiliary puncture tool for puncture.
在又一些实施例中,上述输出第一提示信息,包括:In still other embodiments, the above-mentioned outputting of the first prompt information includes:
获取第一器件的第四坐标;该第四坐标为该第一器件的第一结构的坐标;Acquiring fourth coordinates of the first device; the fourth coordinates are coordinates of the first structure of the first device;
在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息,该第三参考坐标根据该用户在该第一状态时采集的该肺部CT图像确定。In the case that the distance between the fourth coordinate and the third reference coordinate is less than or equal to the second threshold, the first prompt information is output, and the third reference coordinate is based on the lung CT collected by the user in the first state. Image OK.
本实施例中,该第一器件可以理解为穿刺针,或者其他穿刺工具。可以理解的是,第一器件往往由由多个结构组成,以穿刺针为例,穿刺针可以包括手柄和针头。本实施例中,该第一结构可以理解为实际操作中最先接触用户体表的结构,使得信息处理装置辅助穿刺工具的穿刺操作更加准确,例如,在该第一器件为穿刺针的情况下,该第一结构为穿刺针的针尖。In this embodiment, the first device can be understood as a puncture needle or other puncture tools. It can be understood that the first device is often composed of multiple structures, taking a puncture needle as an example, the puncture needle may include a handle and a needle. In this embodiment, the first structure can be understood as the structure that first contacts the user's body surface in actual operation, so that the puncture operation of the puncture tool assisted by the information processing device is more accurate. For example, in the case where the first device is a puncture needle , the first structure is the tip of the puncture needle.
本实施例中,信息处理装置根据该用户在该第一状态时采集的该肺部CT图像确定第三参考坐标,该第三参考坐标可以理解为穿刺工具的穿刺点。In this embodiment, the information processing device determines a third reference coordinate according to the lung CT image acquired by the user in the first state, and the third reference coordinate can be understood as a puncture point of the puncture tool.
由于上述输出第一提示信息,包括:在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息。可以理解为,在该至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件,且在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息。Due to the aforementioned outputting the first prompt information, it includes: outputting the first prompt information when the distance between the fourth coordinate and the third reference coordinate is less than or equal to the second threshold. It can be understood that the relationship between the second coordinates of each of the at least two markers and the corresponding first reference coordinates satisfies a preset condition, and the relationship between the fourth coordinates and the third reference coordinates When the distance is less than or equal to the second threshold, the first prompt information is output.
本实施例中,在一种实现方式中,信息处理装置可以同时分别对标记物的坐标和第一器件的坐标进行处理,进而判断是否至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件,且在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值,在两个条件同时满足的情况下,输出第一提示信息。In this embodiment, in an implementation manner, the information processing device may simultaneously process the coordinates of the marker and the coordinates of the first device separately, and then determine whether the second coordinate of each marker in at least two markers is consistent with The relationship between the corresponding first reference coordinates satisfies the preset condition, and the distance between the fourth coordinate and the third reference coordinate is less than or equal to the second threshold, and if the two conditions are met at the same time, output the first Prompt information.
在另一种实现方式中,信息处理装置可以先对第一器件的坐标进行处理,在在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,进一步对标记物的坐标进行处理,判断是否至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件,在至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件的情况下,输出第一提示信息。In another implementation, the information processing device may first process the coordinates of the first device, and further process the coordinates of the marking when the distance between the fourth coordinates and the third reference coordinates is less than or equal to the second threshold The coordinates of the object are processed to determine whether the relationship between the second coordinates of each of the at least two markers and the corresponding first reference coordinates satisfies the preset condition, and the coordinates of each of the at least two markers When the relationship between the second coordinates and the corresponding first reference coordinates satisfies the preset condition, the first prompt information is output.
可以理解的是,可以根据实际情况对该第二阈值进行设定。由于该第二阈值为坐标之间的距离,示例性地,该第一阈值可以是1厘米,或者1.5厘米等,本申请对此不作限定。It can be understood that the second threshold can be set according to actual conditions. Since the second threshold is the distance between coordinates, for example, the first threshold may be 1 cm, or 1.5 cm, etc., which is not limited in the present application.
通过上述方法,信息处理装置还可以辅助穿刺工具定位第三参考位置,进一步提高辅助穿刺工具进行穿刺的准确率。Through the above method, the information processing device can also assist the puncture tool to locate the third reference position, further improving the accuracy of the puncture by the auxiliary puncture tool.
在一些实施例中,该输出第一提示信息之前,信息处理方法还包括:In some embodiments, before outputting the first prompt information, the information processing method further includes:
获取第一模型;该第一模型由使用图像分割算法对该用户在该第一状态时采集的该肺部CT图像进行建模得到;该第一模型用于重建该用户的内部器官以及第一目标的位置;Acquiring a first model; the first model is obtained by using an image segmentation algorithm to model the lung CT image collected by the user in the first state; the first model is used to reconstruct the user's internal organs and the first the location of the target;
将该第一模型中的第一位置对应的坐标作为该第三参考坐标;该第一位置根据该用户的内部器官以及第一目标的位置确定。The coordinates corresponding to the first position in the first model are used as the third reference coordinates; the first position is determined according to the user's internal organs and the position of the first target.
本实施例中,用户完成CT之后,信息处理装置需要获取CT图像的三维重建结果。In this embodiment, after the user completes the CT, the information processing device needs to obtain the three-dimensional reconstruction result of the CT image.
在一种实现方式中,信息处理装置可以从其他设备,例如CT仪或其他处理设备处获取该第一模型。在另一种实现方式中,信息处理装置可以获取该用户在该第一状态时采集的该肺部CT图像,然后使用图像分割算法进行三维重建得到该第一模型。In an implementation manner, the information processing apparatus may obtain the first model from other devices, such as a CT machine or other processing devices. In another implementation manner, the information processing device may acquire the lung CT image acquired when the user is in the first state, and then use an image segmentation algorithm to perform three-dimensional reconstruction to obtain the first model.
本实施例中,该第一目标可以是病灶组织,也可以是其他需要进行穿刺操作获取的目标,本申请对此不作限定。在信息处理装置获取到该第一模型后,可以根据该第一模型中被重建的器官以及该第一目标的位置确定用户体表上的第一位置,该第一位置可用于第一器件的穿刺操作,然后,将第一位置对应的坐标作为该第三参考坐标。In this embodiment, the first target may be the lesion tissue, or other targets that need to be obtained through a puncture operation, which is not limited in this application. After the information processing device acquires the first model, it can determine the first position on the user's body surface according to the reconstructed organ in the first model and the position of the first target, and the first position can be used for the first device In the puncturing operation, the coordinates corresponding to the first position are used as the third reference coordinates.
可以理解的是,信息处理装置根据该用户的内部器官以及第一目标的位置确定该第一位置时,在一种实现方式中,该第一位置为用户体表上距离该第一目标最近的位置。It can be understood that when the information processing device determines the first position according to the internal organs of the user and the position of the first target, in an implementation manner, the first position is the closest point on the user's body surface to the first target. Location.
在另一种实现方式中,该第一位置与该第一目标之间的距离小于第一距离阈值,且该第一位置与该第一目标之间形成的路径接触的器官或组织的数量小于第一数量阈值,可以理解的是,该第一距离阈值和该第一数量阈值可以根据实际情况进行设定,本申请对此不作限定。In another implementation, the distance between the first position and the first target is less than a first distance threshold, and the number of organs or tissues that are in contact with the path formed between the first position and the first target is less than For the first quantity threshold, it can be understood that the first distance threshold and the first quantity threshold can be set according to actual conditions, which is not limited in the present application.
在又一种实现方式中,信息处理装置还可以接收第一指令,该第一指令用于指示该第一位置。也就是说,在用户的内部情况较复杂的情况下,比如,某些组织较脆弱不适宜被接触,信息处理装置可以根据第一指令确定该第一位置。例如,信息处理装置可以包括输入设备,通过该输入设备接收该第一位置的信息;或者,信息处理装置可以包括可触摸的显示屏,响应于触摸或点击操作来确定该第一位置。In yet another implementation manner, the information processing apparatus may further receive a first instruction, where the first instruction is used to indicate the first location. That is to say, when the user's internal situation is relatively complicated, for example, some tissues are too fragile to be touched, the information processing device may determine the first position according to the first instruction. For example, the information processing apparatus may include an input device through which the information of the first location is received; or, the information processing apparatus may include a touchable display screen to determine the first location in response to a touch or click operation.
在又一些实施例中,信息处理方法还包括:In some other embodiments, the information processing method also includes:
获取该第一器件的第一角度;acquiring a first angle of the first device;
在该第一角度指向该第一目标的位置的情况下,输出第二提示信息。In the case that the first angle points to the position of the first target, second prompt information is output.
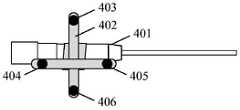
本实施例中,在信息处理装置输出第一提示信息之后,还获取该第一器件的第一角度。为便于理解,以穿刺针为例,请参阅图4,图4是本申请实施例提供的一种穿刺针的示意图。In this embodiment, after the information processing apparatus outputs the first prompt information, it further acquires the first angle of the first device. For ease of understanding, taking a puncture needle as an example, please refer to FIG. 4 , which is a schematic diagram of a puncture needle provided in an embodiment of the present application.
如图4所示,401部分为穿刺针,穿刺针401与支架402连接在一起,支架402上粘贴4个标记物,即标记物403、标记物404、标记物405以及标记物406。As shown in FIG. 4 ,
根据数学知识可以理解,两个点可以确定一条直线,位于不同直线上的三个点可以确定一个面。信息处理装置可以从以上4个标记物任选择三个标记物,通过三个标记物的三维坐标得到它们所在平面,进而确定穿刺针401的角度。According to mathematical knowledge, it can be understood that two points can determine a straight line, and three points on different straight lines can determine a surface. The information processing device can select three markers from the above four markers, obtain the planes where they are located through the three-dimensional coordinates of the three markers, and then determine the angle of the
本实施例中,在该第一角度指向该第一目标的位置的情况下,输出第二提示信息。该第二提示信息可用于对该第一器件的推进方向进行提示,本申请实施例中,不限定输出该第二提示信息的方式。示例性地,信息处理装置可以通过语音的方式输出提示音;也可以通过图像的方式在显示屏上显示提示信息。In this embodiment, when the first angle points to the position of the first target, second prompt information is output. The second prompt information may be used to prompt the advancing direction of the first device, and in the embodiment of the present application, the manner of outputting the second prompt information is not limited. Exemplarily, the information processing device may output the prompt sound by voice; it may also display the prompt information on the display screen by image.
本实施例中,信息处理装置进一步对第一器件的角度进行提示,进一步提高辅助穿刺工具进行穿刺的准确率,节约穿刺花费的时间。另外,由于信息处理装置对穿刺工具推进过程中的角度进行辅助提示,可以减少穿刺过程中的医学影像扫描次数。In this embodiment, the information processing device further prompts the angle of the first device, further improves the accuracy of the puncture by the auxiliary puncture tool, and saves time spent on puncture. In addition, since the information processing device provides an auxiliary reminder of the angle during the advancing process of the puncturing tool, the number of medical image scans during the puncturing process can be reduced.
为便于理解本申请实施例提供的信息处理方法,接下来以该标记物为光学标记小球,第一器件为穿刺针为例,结合图5和图6进行对本申请提出的信息处理方法进行解释。In order to facilitate the understanding of the information processing method provided by the embodiment of the present application, next, taking the marker as an optical marking ball and the first device as a puncture needle as an example, the information processing method proposed in this application is explained in conjunction with Fig. 5 and Fig. 6 .
示例性地,请参阅图5,图5是本申请实施例提供的一种确定呼吸门控参考数据的方法流程示意图。如图5所示,该方法包括:For example, please refer to FIG. 5 . FIG. 5 is a schematic flowchart of a method for determining respiratory gating reference data provided in an embodiment of the present application. As shown in Figure 5, the method includes:
501:检测与光学标记系统的连接。501: Detecting the connection with the optical marking system.
本步骤中,信息处理装置检测与光学标记系统的连接,以便于后续通过光学标记系统获取到光学标记小球的坐标。可以理解的是,光学标记小球被贴于用户的体表,例如肺部、胸部体表。另外,光学标记小球的个数为至少两个。In this step, the information processing device detects the connection with the optical marking system, so as to obtain the coordinates of the optical marking ball through the optical marking system later. It can be understood that the optical marker ball is attached to the user's body surface, such as the lungs and chest body surface. In addition, the number of optical marker balls is at least two.
502:检测与CT仪的连接。502: Detect the connection with the CT instrument.
本步骤中,信息处理装置检测与CT仪的连接,以便于通过CT仪获取CT图像等数据。可以理解的是,在CT仪开始工作之前,用户所在的扫描床需在CT扫描窗内。In this step, the information processing device detects the connection with the CT instrument, so as to obtain data such as CT images through the CT instrument. It can be understood that before the CT machine starts to work, the scanning table where the user is located needs to be within the CT scanning window.
本申请实施例中,上述步骤501、步骤502可以理解为确定呼吸门控参考数据之前的准备工作。In the embodiment of the present application, the above-mentioned
在步骤501、步骤502之后,信息处理装置一方面执行步骤5031:采集肺部的CT图像。After
本步骤中,信息处理装置可以通过CT仪获取到用户的肺部CT图像,即CT影像数据。可以理解的是,肺部上下起伏的呼吸动作会导致病灶的位置和身体内部器官的移动,如果用户正常呼吸进行CT,那么得到的影像数据常常会带有伪影,不利于确定病灶的准确位置。所以用户在进行CT时会有一段时间的憋气,憋气时,用户身体内部的器官基本稳定,得到的影像数据更加清晰。In this step, the information processing device may acquire a CT image of the user's lungs, that is, CT image data, through a CT apparatus. It is understandable that the ups and downs of the lungs will cause the location of the lesion and the movement of the internal organs of the body. If the user performs CT with normal breathing, the obtained image data will often have artifacts, which is not conducive to determining the exact location of the lesion. . Therefore, the user will hold his breath for a period of time when performing CT. When holding his breath, the internal organs of the user's body are basically stable, and the obtained image data is clearer.
可以理解的是,用户憋气可以是呼出一口气后进行憋气,也可以是吸如一口气后进行憋气等。也就是说,用户可以在不同的呼吸程度下进行憋气。It is understandable that the user may hold his breath after exhaling a breath, or hold his breath after taking a breath, etc. In other words, users can hold their breath at different breathing levels.
因此,本步骤中,信息处理装置采集肺部CT图像可以理解为采集用户憋气时肺部CT图像。Therefore, in this step, the acquisition of lung CT images by the information processing device may be understood as acquisition of lung CT images when the user holds his breath.
5041:记录CT图像的当前采集时刻。5041: Record the current acquisition moment of the CT image.
本步骤中,CT图像的当前采集时刻可以理解为用户憋气时候采集CT图像的时刻。可以理解的是,由于用户进行CT时会在一段时间内憋气(可以称为憋气时间段,如图3中的时间段t1),而在憋气时间段内用户的呼吸幅度基本上保持不变,可以认为用户在憋气时间段内的呼吸幅度为固定值,因此,本申请实施例中,该当前采集时刻可以理解为该憋气时间段内的任一时刻。In this step, the current collection time of the CT image can be understood as the time when the user holds his breath to collect the CT image. It can be understood that since the user will hold his breath for a period of time during CT (which can be called the breath-holding time period, such as the time period t1 in Figure 3), the user's breath amplitude remains basically unchanged during the breath-holding time period , it can be considered that the breathing range of the user during the breath-holding time period is a fixed value, therefore, in the embodiment of the present application, the current collection moment can be understood as any moment within the breath-holding time period.
另一方面,信息处理装置执行步骤5032:实时检测光学标记小球的空间坐标数据。On the other hand, the information processing device executes step 5032: detecting the spatial coordinate data of the optical marker ball in real time.
本步骤中,信息处理装置实时检测每个光学标记小球的空间坐标数据,该空间坐标数据也可以称为三维坐标数据。In this step, the information processing device detects the spatial coordinate data of each optical marker ball in real time, and the spatial coordinate data may also be called three-dimensional coordinate data.
5042:获取连续时间段内的光学标记小球的空间坐标数据。5042: Obtain the spatial coordinate data of the optical marker ball in a continuous time period.
本步骤中,信息处理装置获取连续时间段内光学标记小球的空间坐标数据。可以理解的是,该连续时间段包括该憋气时间段。In this step, the information processing device acquires the spatial coordinate data of the optically marked ball within a continuous period of time. It can be understood that the continuous time period includes the breath-holding time period.
505:将CT采集时刻对应的光学标记小球的空间坐标数据作为呼吸门控参考数据。505: Use the spatial coordinate data of the optical marker sphere corresponding to the CT acquisition time as the respiratory gating reference data.
本步骤中,信息处理装置将CT采集时刻对应的光学标记坐标数据作为呼吸门控参考数据。In this step, the information processing device uses the optical marker coordinate data corresponding to the CT acquisition time as the respiratory gating reference data.
示例性地,信息处理装置可以通过光学标记小球的空间坐标数据得到如图3所示的呼吸曲线,其中,呼吸曲线的横坐标为时间,纵坐标为呼吸幅度。时刻ta和时刻tb之间的时长t1可以理解为该憋气时间段,如图3所示,时间段t1内,用户的呼吸幅度几乎为0。Exemplarily, the information processing device can obtain the breathing curve as shown in FIG. 3 through the spatial coordinate data of the optically marked ball, wherein the abscissa of the breathing curve is time, and the ordinate is breathing amplitude. The durationt1 between the time ta and the timetb can be understood as the breath-holding time period. As shown in FIG. 3 , within the time periodt1 , the breathing range of the user is almost zero.
本步骤中,该呼吸门控参考数据可以理解为光学标记小球在时间段t1内任一时刻的空间坐标数据。本申请实施例中,由于光学标记小球的个数为至少一个。在一种可能的实现方式中,信息处理装置将至少一个光学标记小球中任一个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据。In this step, the respiratory gating reference data can be understood as the spatial coordinate data of the optical marker ball at any time within the time periodt1 . In the embodiment of the present application, since the number of optical marker balls is at least one. In a possible implementation manner, the information processing device uses the spatial coordinate data corresponding to any one of the at least one optical marker sphere at the time of CT acquisition as the respiratory gating reference data.
在另一种可能的实现方式中,信息处理装置将至少一个光学标记小球中每个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据。In another possible implementation manner, the information processing device uses the spatial coordinate data corresponding to each optical marker sphere in the at least one optical marker sphere at the time of CT acquisition as the respiratory gating reference data.
506:根据采集的CT图像确定入针点和靶点。506: Determine the needle entry point and the target point according to the collected CT image.
本步骤中,信息处理装置可以使用图像分割算法对上述CT图像进行三维建模得到三维模型。该三维模型用于显示用户身体内部器官以及病灶的位置。然后,根据身体内部器官以及病灶的位置在该三维模型上确定入针点和穿刺靶点,该穿刺靶点可以理解为病灶的位置,该入针点可以理解为人体体表上用于刺入穿刺针的位置。In this step, the information processing device may use an image segmentation algorithm to perform three-dimensional modeling on the CT image to obtain a three-dimensional model. The three-dimensional model is used to display the positions of internal organs and lesions in the user's body. Then, according to the internal organs of the body and the position of the lesion, the needle entry point and the puncture target point are determined on the three-dimensional model. The position of the puncture needle.
示例性地,信息处理装置可以在该三维模型对确定的穿刺入针点和穿刺靶点进行标记。Exemplarily, the information processing device may mark the determined puncture entry point and puncture target point on the three-dimensional model.
可以理解的是,本申请实施例中,不限定步骤505和步骤506的执行顺序,可以先执行步骤505,也可以先执行步骤506。It can be understood that, in this embodiment of the present application, the execution order of
在通过步骤505确定呼吸门控参考数据,步骤506确定入针点和靶点之后,信息处理装置还执行以下步骤。示例性地,请参阅图6,图6是本申请实施例提供的另一种信息处理方法的流程示意图。如图6所示,该方法包括:After determining the respiratory gating reference data in
601:确定用户扫描床退出CT扫描窗。601: Determine that the user's scanning bed exits the CT scanning window.
602:确定开始辅助穿刺操作。602: It is determined to start the auxiliary puncturing operation.
本申请实施例中,上述步骤601、步骤602可以理解为进行穿刺之前的准备工作。In the embodiment of the present application, the
603:实时获取用户身上的光学标记小球的空间坐标数据。603: Acquiring the spatial coordinate data of the optical marker ball on the user's body in real time.
本步骤中,信息处理装置实时获取用户身上的光学标记小球的空间坐标数据。可以理解的是,人体的呼吸是连续不断的,需要实时通过光学标记的空间坐标数据来确定用户的呼吸状态,即用户的呼吸幅度。In this step, the information processing device acquires the spatial coordinate data of the optical marker ball on the user's body in real time. It can be understood that the breathing of the human body is continuous, and the user's breathing state, that is, the user's breathing range, needs to be determined in real time through the spatial coordinate data of the optical marker.
604:将实时采集的光学标记小球的空间坐标数据与呼吸门控参考数据进行配准比对。604: Registering and comparing the spatial coordinate data of the optical marker ball collected in real time with the respiratory gating reference data.
本步骤中,信息处理装置计算当前时刻光学标记小球的空间坐标数据与呼吸门控参考数据之间的位移,以此来判定空间坐标数据与呼吸门控参考数据是否配准。In this step, the information processing device calculates the displacement between the spatial coordinate data of the optical marker ball and the respiratory gating reference data at the current moment, so as to determine whether the spatial coordinate data and the respiratory gating reference data are registered.
根据步骤505,在一种实现方式中,在将任一个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据的情况下,信息处理装置计算当前时刻该任一个光学标记小球的空间坐标数据与呼吸门控参考数据之间的位移,以此来判定空间坐标数据与呼吸门控参考数据是否配准。According to step 505, in an implementation manner, under the condition that the spatial coordinate data corresponding to any optical marker ball at the time of CT acquisition is used as the respiratory gating reference data, the information processing device calculates the current time for any optical marker The displacement between the spatial coordinate data of the ball and the respiratory gating reference data is used to determine whether the spatial coordinate data and the respiratory gating reference data are registered.
在另一种实现方式中,在将每个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据的情况下,信息处理装置计算当前时刻每个光学标记小球的空间坐标数据与呼吸门控参考数据中对应的光学标记小球之间的位移,以此来判定空间坐标数据与呼吸门控参考数据是否配准。In another implementation, when the spatial coordinate data corresponding to each optical marker sphere at the time of CT acquisition is used as the respiratory gating reference data, the information processing device calculates the spatial coordinates of each optical marker sphere at the current moment. The displacement between the coordinate data and the corresponding optical marker ball in the respiratory gating reference data is used to determine whether the spatial coordinate data and the respiratory gating reference data are registered.
605:判断空间坐标数据与呼吸门控参考数据是否配准。605: Determine whether the spatial coordinate data is registered with the respiratory gating reference data.
本步骤中,信息处理装置可以通过位移来判断空间坐标数据与呼吸门控参考数据是否配准。In this step, the information processing device can judge whether the spatial coordinate data and the respiratory gating reference data are registered through the displacement.
示例性地,在将任一个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据的情况下,信息处理装置判断在CT采集时刻对应的空间坐标数据与该呼吸门控参考数据之间的位移是否小于阈值。Exemplarily, in the case that the spatial coordinate data corresponding to any optical marker ball at the time of CT acquisition is used as the respiratory gating reference data, the information processing device judges that the spatial coordinate data corresponding to the CT acquisition time is consistent with the respiratory gating Whether the displacement between the reference data is less than the threshold.
示例性地,在将每个光学标记小球在CT采集时刻对应的空间坐标数据作为该呼吸门控参考数据的情况下,信息处理装置判断在CT采集时刻对应的每个空间坐标数据与该呼吸门控参考数据中对应的空间坐标数据之间的位移是否小于阈值。Exemplarily, in the case that the spatial coordinate data corresponding to each optical marker ball at the CT acquisition moment is used as the respiratory gating reference data, the information processing device judges that each spatial coordinate data corresponding to the CT acquisition moment is related to the respiratory gating Whether the displacement between the corresponding spatial coordinate data in the gated reference data is smaller than a threshold.
在步骤605的判断结果为否的情况下,信息处理装置执行步骤606:提示不安全,暂停穿刺。If the judgment result in
本步骤中,信息处理装置可以通过语音播报的方式,或者,图像警示的方式提示不安全,使得操作者(例如医生)暂停穿刺。In this step, the information processing device may prompt that it is unsafe through a voice broadcast or an image warning, so that the operator (such as a doctor) suspends the puncture.
在步骤605的判断结果为是,即判断用户的呼吸幅度符合要求的情况下,信息处理装置执行步骤607:确定穿刺针的位置。If the judgment result in
可以理解的是,穿刺针上连接有支架,支架上粘贴有光学标记小球,如图4所示。信息处理装置可以通过光学标记小球确定穿刺针的位置。示例性地,该穿刺针的位置可以是穿刺针的空间坐标。It can be understood that the puncture needle is connected with a bracket, and the optical marker ball is pasted on the bracket, as shown in FIG. 4 . The information processing device can determine the position of the puncture needle through the optical marker ball. Exemplarily, the position of the puncture needle may be the spatial coordinates of the puncture needle.
在步骤607之后,信息处理装置执行步骤608:判断穿刺针是否到达入针点。After
本步骤中,信息处理装置可以根据穿刺针的空间坐标与入针点的空间坐标之间的位移来判断穿刺针是否到达入针点。例如,该位移小于阈值的情况下,确定穿刺针到达入针点;该位移大于阈值的情况下,确定穿刺针未到达入针点。In this step, the information processing device may determine whether the puncture needle has reached the needle insertion point according to the displacement between the spatial coordinates of the puncture needle and the spatial coordinates of the needle insertion point. For example, when the displacement is smaller than the threshold, it is determined that the puncture needle has reached the needle entry point; when the displacement is greater than the threshold, it is determined that the puncture needle has not reached the needle entry point.
在步骤608的判断结果为否的情况下,执行步骤609:重新获取穿刺针的位置。If the judgment result in
在执行步骤609之后,信息处理装置重新执行步骤608。After
在步骤608的判断结果为是的情况下,执行步骤610:确定穿刺针的角度。If the judgment result of
本步骤中,如图4所示,信息处理装置可以通过支架上的光学标记小球确定穿刺针的角度。In this step, as shown in FIG. 4 , the information processing device can determine the angle of the puncture needle through the optical marker ball on the bracket.
611:判断穿刺针的角度是否指向靶点。611: Determine whether the angle of the puncture needle points to the target point.
在步骤611的判断结果为否的情况下,信息处理装置重新执行步骤610,和步骤611。If the judgment result in
在步骤611的判断结果为是的情况下,信息处理装置执行步骤612:提示进行穿刺。If the determination result in
本步骤中,信息处理装置可以通过语音播报的方式,或者,图像警示的方式提示进行穿刺。In this step, the information processing device may prompt to perform the puncture by means of a voice broadcast or an image warning.
在信息处理装置确定靶点穿刺引导完成之后,还可以对穿刺完成的用户进行再一次CT,在信息处理装置获取到该CT影像数据,并根据该CT影像数据计算精度达到要求的情况下,确定完成穿刺采样。After the information processing device determines that the puncture guidance of the target point is completed, another CT can be performed on the user who has completed the puncture. When the information processing device obtains the CT image data and the calculation accuracy of the CT image data meets the requirements, determine Complete punch sampling.
上述详细阐述了本申请实施例的方法,下面提供本申请实施例的装置。The method of the embodiment of the present application has been described in detail above, and the device of the embodiment of the present application is provided below.
请参阅图7,图7是本申请实施例提供的一种信息处理装置的结构示意图。该信息处理装置70用于执行上述信息处理方法,应理解,但凡能够实现本申请提供的信息处理方法的装置都属于本申请的保护范围。示例性地,该信息处理装置70可以为手机、台式电脑以及便携笔记本等,本申请实施例不作限定。如图7所示,该信息处理装置70包括确定单元701、获取单元702以及输出单元703。其中,各个单元的描述如下:Please refer to FIG. 7 . FIG. 7 is a schematic structural diagram of an information processing device provided by an embodiment of the present application. The
确定单元701,用于将至少两个标记物中每个标记物在第一时刻的第一坐标作为第一参考坐标;该第一参考坐标与该标记物对应,该第一时刻为用户在第一状态时利用计算机断层扫描CT仪采集肺部CT图像的任意时刻,多个该第一时刻对应的多个该第一坐标与该用户在多个该第一时刻的呼吸幅度有关;The
获取单元702,用于获取该至少两个标记物中每个标记物在第二时刻的第二坐标;该第一时刻早于该第二时刻,且该用户在该第二时刻对应第二状态,多个该第二时刻对应的多个该第二坐标与该用户在多个该第二时刻的呼吸幅度有关;An
输出单元703,用于在该至少两个标记物中每个标记物的第二坐标与对应的第一参考坐标之间的关系满足预设条件的情况下,输出第一提示信息。The
在一种可能的实施方式中,获取单元702,还用于获取第一标记物在多个第三时刻对应的第三坐标;该第三时刻属于该用户进行CT过程中的时刻,该第一标记物为该至少两个标记物中的一个;In a possible implementation manner, the acquiring
确定单元701,还用于根据该第一标记物在该多个第三时刻对应的第三坐标确定第一呼吸曲线;该第一呼吸曲线的横坐标用于表示该多个第三时刻,该第一呼吸曲线的纵坐标用于表示该用户在多个第三时刻的呼吸幅度;The determining
确定单元701,具体用于根据该第一呼吸曲线确定第一时间段;该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于第一阈值,且在该第一时间段内的任意两个时刻对应的呼吸幅度的差值的绝对值小于或等于该第一阈值的情况下,该用户处于该第一状态;The determining
确定单元701,具体用于将至少两个标记物中每个标记物在该第一时间段内任一时刻的第三坐标作为该第一参考坐标。The determining
在一种可能的实施方式中,确定单元701,具体用于将该多个第三时刻中任一时刻对应的第三坐标作为第二参考坐标;In a possible implementation manner, the determining
该装置还包括计算单元704,用于分别计算该多个第三时刻中其他时刻对应的第三坐标与该第二参考坐标之间的位移,该位移与该第三时刻对应;The device also includes a
该装置还包括绘制单元705,用于按照该多个第三时刻的先后顺序,将该位移绘制成第一曲线;The device also includes a
确定单元701,具体用于将该第一曲线进行归一化化处理得到的曲线作为该第一呼吸曲线。The determining
在一种可能的实施方式中,获取单元702,还用于获取第一器件的第四坐标;该第四坐标为该第一器件的第一结构的坐标,该第四坐标采用的坐标系与该标记物采用相同的坐标系;In a possible implementation manner, the acquiring
输出单元703,具体用于在该第四坐标与第三参考坐标之间的距离小于或等于第二阈值的情况下,输出第一提示信息,该第三参考坐标根据该用户在该第一状态时采集的该肺部CT图像确定。The
在一种可能的实施方式中,获取单元702,还用于获取第一模型;该第一模型由使用图像分割算法对该用户在该第一状态时采集的该肺部CT图像进行建模得到;该第一模型用于重建该用户的内部器官以及第一目标的位置;In a possible implementation manner, the acquiring
确定单元701,具体用于将该第一模型中的第一位置对应的坐标作为该第三参考坐标;该第一位置根据该用户的内部器官以及第一目标的位置确定,该第一模型与该标记物采用相同的坐标系。The determining
在一种可能的实施方式中,获取单元702,还用于获取该第一器件的第一角度;In a possible implementation manner, the acquiring
输出单元703,还用于在该第一角度指向该第一目标的位置的情况下,输出第二提示信息。The
请参阅图8,图8是本申请实施例提供的另一种信息处理装置的结构示意图。该信息处理装置80可以用于实现上述信息处理方法。示例性地,信息处理装置80可以是手机、台式电脑、便携笔记本等设备。Please refer to FIG. 8 . FIG. 8 is a schematic structural diagram of another information processing device provided by an embodiment of the present application. The
如图8所示。该信息处理装置80包括至少一个处理器802,收发器801用于通过传输介质和其他设备/装置进行通信,输出模块805用于输出提示信息。处理器802可以利用收发器801收发数据和/或信令,还可控制输出模块805输出提示信息,用于实现上述方法实施例中的方法。示例性地,该输出模块805可以是显示屏,也可以是扬声器等,其中,显示屏可以用于显示图片或视频等,扬声器可以通过震动输出提示音等。As shown in Figure 8. The
可选地,信息处理装置80还可以包括至少一个存储器803,用于存储程序指令和/或数据。存储器803和处理器802耦合。本申请实施例中的耦合是装置、单元或模块之间的间接耦合或通信连接,可以是电性,机械或其它的形式,用于装置、单元或模块之间的信息交互。处理器802可能和存储器803协同操作。处理器802可能执行存储器803中存储的程序指令。该至少一个存储器中的至少一个可以包括于处理器中。Optionally, the
本申请实施例中不限定上述收发器801、处理器802、存储器803以及输出模块805之间的具体连接介质。本申请实施例在图8中以存储器803、处理器802、收发器801以及输出模块805之间通过总线804连接,总线在图8中以粗线表示,其它部件之间的连接方式,仅是进行示意性说明,并不引以为限。该总线可以分为地址总线、数据总线、控制总线等。为便于表示,图8中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。In the embodiment of the present application, the specific connection medium among the
在本申请实施例中,处理器可以是通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件,可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。In this embodiment of the application, the processor may be a general-purpose processor, a digital signal processor, an application-specific integrated circuit, a field programmable gate array or other programmable logic device, a discrete gate or transistor logic device, or a discrete hardware component, and may implement or Execute the methods, steps and logic block diagrams disclosed in the embodiments of the present application. A general purpose processor may be a microprocessor or any conventional processor or the like. The steps of the methods disclosed in connection with the embodiments of the present application may be directly implemented by a hardware processor, or implemented by a combination of hardware and software modules in the processor.
可理解,在信息处理装置80为上述信息处理装置70时,确定单元701执行的动作可以由处理器802执行,获取单元702执行的动作可以由收发器801执行,输出单元703执行的动作可以由输出模块805执行。It can be understood that when the
本申请还提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机代码,当计算机代码在计算机上运行时,使得计算机执行上述实施例的方法。The present application also provides a computer-readable storage medium, where computer codes are stored in the computer-readable storage medium, and when the computer codes are run on the computer, the computer is made to execute the methods of the above-mentioned embodiments.
本申请还提供一种计算机程序产品,该计算机程序产品包括计算机代码或计算机程序,当该计算机代码或计算机程序在计算机上运行时,使得上述实施例中的方法被执行。The present application also provides a computer program product, the computer program product includes computer code or computer program, and when the computer code or computer program is run on a computer, the methods in the above embodiments are executed.
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以上述权利要求的保护范围为准。The above is only a specific implementation of the application, but the scope of protection of the application is not limited thereto. Anyone familiar with the technical field can easily think of changes or substitutions within the technical scope disclosed in the application. Should be covered within the protection scope of this application. Therefore, the protection scope of the present application should be based on the protection scope of the above claims.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111599307.4ACN115399839B (en) | 2021-12-24 | 2021-12-24 | Information processing method and related device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111599307.4ACN115399839B (en) | 2021-12-24 | 2021-12-24 | Information processing method and related device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115399839Atrue CN115399839A (en) | 2022-11-29 |
| CN115399839B CN115399839B (en) | 2025-02-18 |
Family
ID=84156498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111599307.4AActiveCN115399839B (en) | 2021-12-24 | 2021-12-24 | Information processing method and related device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115399839B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116047412A (en)* | 2023-03-28 | 2023-05-02 | 深圳惟德精准医疗科技有限公司 | Artifact coordinate removal method of marker and related device |
| CN116883494A (en)* | 2023-01-20 | 2023-10-13 | 深圳市箴石医疗设备有限公司 | Patient pose monitoring method, device, system and storage medium |
Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6144875A (en)* | 1999-03-16 | 2000-11-07 | Accuray Incorporated | Apparatus and method for compensating for respiratory and patient motion during treatment |
| US6501981B1 (en)* | 1999-03-16 | 2002-12-31 | Accuray, Inc. | Apparatus and method for compensating for respiratory and patient motions during treatment |
| US20080221520A1 (en)* | 2005-09-14 | 2008-09-11 | Cas Innovations Ag | Positioning System for Percutaneous Interventions |
| CN102018575A (en)* | 2010-12-08 | 2011-04-20 | 清华大学 | Robot-assisted system and method for controlling flexible needle to puncture soft tissues in real time |
| US20110295109A1 (en)* | 2009-01-29 | 2011-12-01 | Imactis | Method and device for navigation of a surgical tool |
| CN103347454A (en)* | 2010-10-01 | 2013-10-09 | 瓦里安医疗系统公司 | Delivery catheter for and method of delivering an implant, for example, bronchoscopically implanting marker in lung |
| CN104605917A (en)* | 2014-12-24 | 2015-05-13 | 沈阳东软医疗系统有限公司 | Intelligent puncturing method and device |
| CN106859742A (en)* | 2017-03-21 | 2017-06-20 | 北京阳光易帮医疗科技有限公司 | A kind of puncturing operation navigation positioning system and method |
| CN107374678A (en)* | 2017-08-15 | 2017-11-24 | 陈晓阳 | A kind of virtual positioning CT guiding lower lung biopsy methods |
| CN107432766A (en)* | 2017-07-04 | 2017-12-05 | 厦门强本宇康科技有限公司 | A kind of accurate minimally invasive operation navigating system |
| CN109620303A (en)* | 2018-11-26 | 2019-04-16 | 苏州朗开医疗技术有限公司 | A kind of lung's aided diagnosis method and device |
| CN208942306U (en)* | 2017-12-13 | 2019-06-07 | 四川阿科瑞特科技有限公司 | A kind of lung's radiation treatment puncture template of anti-displacement |
| CN110269624A (en)* | 2019-07-16 | 2019-09-24 | 浙江伽奈维医疗科技有限公司 | A kind of respiration monitoring device and its monitoring of respiration method based on RGBD camera |
| CN111067622A (en)* | 2019-12-09 | 2020-04-28 | 天津大学 | Respiratory motion compensation method for percutaneous lung puncture |
| CN111513849A (en)* | 2020-04-30 | 2020-08-11 | 京东方科技集团股份有限公司 | A surgical system, control method and control device for puncture |
| CN111759420A (en)* | 2020-07-09 | 2020-10-13 | 济南优科医疗技术有限公司 | Puncture robot respiration follow-up method |
| CN113081282A (en)* | 2021-04-22 | 2021-07-09 | 浙江大学 | Six-degree-of-freedom CT-compatible breathing compensation needle puncture robot |
| US20210307838A1 (en)* | 2017-12-29 | 2021-10-07 | Weipeng (Suzhou) Co., Ltd. | Surgical navigation method and system |
- 2021
- 2021-12-24CNCN202111599307.4Apatent/CN115399839B/enactiveActive
Patent Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6501981B1 (en)* | 1999-03-16 | 2002-12-31 | Accuray, Inc. | Apparatus and method for compensating for respiratory and patient motions during treatment |
| US6144875A (en)* | 1999-03-16 | 2000-11-07 | Accuray Incorporated | Apparatus and method for compensating for respiratory and patient motion during treatment |
| US20080221520A1 (en)* | 2005-09-14 | 2008-09-11 | Cas Innovations Ag | Positioning System for Percutaneous Interventions |
| US20110295109A1 (en)* | 2009-01-29 | 2011-12-01 | Imactis | Method and device for navigation of a surgical tool |
| CN103347454A (en)* | 2010-10-01 | 2013-10-09 | 瓦里安医疗系统公司 | Delivery catheter for and method of delivering an implant, for example, bronchoscopically implanting marker in lung |
| CN102018575A (en)* | 2010-12-08 | 2011-04-20 | 清华大学 | Robot-assisted system and method for controlling flexible needle to puncture soft tissues in real time |
| CN104605917A (en)* | 2014-12-24 | 2015-05-13 | 沈阳东软医疗系统有限公司 | Intelligent puncturing method and device |
| CN106859742A (en)* | 2017-03-21 | 2017-06-20 | 北京阳光易帮医疗科技有限公司 | A kind of puncturing operation navigation positioning system and method |
| CN107432766A (en)* | 2017-07-04 | 2017-12-05 | 厦门强本宇康科技有限公司 | A kind of accurate minimally invasive operation navigating system |
| CN107374678A (en)* | 2017-08-15 | 2017-11-24 | 陈晓阳 | A kind of virtual positioning CT guiding lower lung biopsy methods |
| CN208942306U (en)* | 2017-12-13 | 2019-06-07 | 四川阿科瑞特科技有限公司 | A kind of lung's radiation treatment puncture template of anti-displacement |
| US20210307838A1 (en)* | 2017-12-29 | 2021-10-07 | Weipeng (Suzhou) Co., Ltd. | Surgical navigation method and system |
| CN109620303A (en)* | 2018-11-26 | 2019-04-16 | 苏州朗开医疗技术有限公司 | A kind of lung's aided diagnosis method and device |
| CN110269624A (en)* | 2019-07-16 | 2019-09-24 | 浙江伽奈维医疗科技有限公司 | A kind of respiration monitoring device and its monitoring of respiration method based on RGBD camera |
| CN111067622A (en)* | 2019-12-09 | 2020-04-28 | 天津大学 | Respiratory motion compensation method for percutaneous lung puncture |
| CN111513849A (en)* | 2020-04-30 | 2020-08-11 | 京东方科技集团股份有限公司 | A surgical system, control method and control device for puncture |
| CN111759420A (en)* | 2020-07-09 | 2020-10-13 | 济南优科医疗技术有限公司 | Puncture robot respiration follow-up method |
| CN113081282A (en)* | 2021-04-22 | 2021-07-09 | 浙江大学 | Six-degree-of-freedom CT-compatible breathing compensation needle puncture robot |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116883494A (en)* | 2023-01-20 | 2023-10-13 | 深圳市箴石医疗设备有限公司 | Patient pose monitoring method, device, system and storage medium |
| CN116047412A (en)* | 2023-03-28 | 2023-05-02 | 深圳惟德精准医疗科技有限公司 | Artifact coordinate removal method of marker and related device |
| CN116047412B (en)* | 2023-03-28 | 2023-06-02 | 深圳惟德精准医疗科技有限公司 | Artifact coordinate removal method of marker and related device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115399839B (en) | 2025-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220039873A1 (en) | Ultrasound guidance system and method | |
| KR20210016378A (en) | How to align the patient's image data with the patient's actual field of view using an optical cord attached to the patient | |
| CN110494921A (en) | Utilize the RUNTIME VIEW of three-dimensional data enhancing patient | |
| US20120262460A1 (en) | Image processing apparatus, and processing method and non-transitory computer-readable storage medium for the same | |
| JP2011502681A (en) | System and method for quantitative 3DCEUS analysis | |
| CN106725852A (en) | The operation guiding system of lung puncture | |
| CN106108951A (en) | A kind of medical real-time three-dimensional location tracking system and method | |
| CN115399839A (en) | Information processing method and related device | |
| CN113662573B (en) | Mammary gland focus positioning method, device, computer equipment and storage medium | |
| CN116807577B (en) | Full-automatic venipuncture equipment and full-automatic venipuncture method | |
| CN117918951B (en) | Method for determining puncture time based on respiration monitoring and related products | |
| CN117017300A (en) | Cardiac source positioning method integrating magnetocardiogram and electrocardiograph | |
| CN115399840B (en) | Information processing method and related device | |
| CN116453715A (en) | A remote palpation method and system | |
| CN205964158U (en) | With about band of chest of pulmonary surgery navigation adapted | |
| CN119279723A (en) | Puncture method based on contrast image and related products | |
| CN111419254B (en) | Reset detection method for medical imaging equipment and medical imaging system | |
| CN118902494A (en) | Quality control system for carotid artery scanning technique of palm ultrasonic non-professional person | |
| CN116047412B (en) | Artifact coordinate removal method of marker and related device | |
| CN117618085A (en) | Multi-mode medical image-based robot puncture system and control method thereof | |
| CN113075599B (en) | Magnetic resonance signal acquisition method, magnetic resonance system and medium | |
| CN116725663A (en) | Method and related device for determining coordinates | |
| CN116725664A (en) | Registration method and related device | |
| CN116797650A (en) | A method and device for real-time reconstruction of puncture needle plane | |
| CN114259247A (en) | Dynamic PET scanning method, device, electronic device and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |