CN115339543A - A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope ground - Google Patents
A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope groundDownload PDFInfo
- Publication number
- CN115339543A CN115339543ACN202211152520.5ACN202211152520ACN115339543ACN 115339543 ACN115339543 ACN 115339543ACN 202211152520 ACN202211152520 ACN 202211152520ACN 115339543 ACN115339543 ACN 115339543A
- Authority
- CN
- China
- Prior art keywords
- hoof
- mechanical leg
- rod
- bionic mechanical
- bionic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000011664nicotinic acidSubstances0.000titleclaimsabstractdescription34
- 239000000872bufferSubstances0.000titledescription2
- 210000000003hoofAnatomy0.000claimsabstractdescription58
- 210000002683footAnatomy0.000claimsabstractdescription15
- 210000002435tendonAnatomy0.000claimsabstractdescription14
- 230000003139buffering effectEffects0.000claimsabstractdescription13
- 210000000544articulatio talocruralisAnatomy0.000claimsabstractdescription11
- 230000035939shockEffects0.000claimsabstractdescription7
- 239000006096absorbing agentSubstances0.000claimsabstractdescription5
- 210000000878metatarsophalangeal jointAnatomy0.000claimsdescription12
- 230000033001locomotionEffects0.000claimsdescription5
- 230000000694effectsEffects0.000claimsdescription4
- 241000282941Rangifer tarandusSpecies0.000claims1
- 241000283011RangiferSpecies0.000abstractdescription16
- 239000000725suspensionSubstances0.000abstractdescription4
- 210000003371toeAnatomy0.000abstractdescription3
- 230000003044adaptive effectEffects0.000abstractdescription2
- 239000007853buffer solutionSubstances0.000abstractdescription2
- 210000002414legAnatomy0.000description35
- 241001465754MetazoaSpecies0.000description3
- 238000000034methodMethods0.000description3
- 210000003423ankleAnatomy0.000description2
- 238000010586diagramMethods0.000description2
- 235000001968nicotinic acidNutrition0.000description2
- 241000282414Homo sapiensSpecies0.000description1
- 230000000386athletic effectEffects0.000description1
- 230000009286beneficial effectEffects0.000description1
- 210000003414extremityAnatomy0.000description1
- 229910052500inorganic mineralInorganic materials0.000description1
- 210000000629knee jointAnatomy0.000description1
- 230000001617migratory effectEffects0.000description1
- 239000011707mineralSubstances0.000description1
- 230000000087stabilizing effectEffects0.000description1
- 238000012876topographyMethods0.000description1
Images





Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/032—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members with alternately or sequentially lifted supporting base and legs; with alternately or sequentially lifted feet or skid
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A10/00—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE at coastal zones; at river basins
- Y02A10/23—Dune restoration or creation; Cliff stabilisation
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Prostheses (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于工程仿生技术领域,涉及一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿。The invention belongs to the technical field of engineering bionics, and relates to a bionic mechanical leg suitable for use on slope ground and having the function of buffering, saving energy and stabilizing.
背景技术Background technique
我国地形多为山地、丘陵和高原,其中山区面积约占全国总面积的2/3,具有丰富的矿产、林业和水能资源。近几十年来,随着人类的不断探索与开发,人们的活动范围不断地向山地丘陵环境扩展。因此,设计一款适用于斜坡地面的行走机构对山区的开发和保护具有重要意义。足式机器人在崎岖的复杂地形上运动时,对地面的适应能力较强,具有很好的机动性、能效性和稳定性。机械腿作为足式机器人的重要组成部件,能够直接影响足式机器人运动时的稳定性、行走速度和负载能力。my country's topography is mostly mountains, hills and plateaus, among which the area of mountainous areas accounts for about 2/3 of the total area of the country, and is rich in minerals, forestry and hydropower resources. In recent decades, with the continuous exploration and development of human beings, the scope of people's activities has continued to expand to the mountainous and hilly environment. Therefore, designing a walking mechanism suitable for slope ground is of great significance to the development and protection of mountainous areas. When the legged robot moves on the rugged and complex terrain, it has strong adaptability to the ground and has good maneuverability, energy efficiency and stability. As an important component of the legged robot, the mechanical leg can directly affect the stability, walking speed and load capacity of the legged robot.
自然界的生物经过长时间的进化,具有更出色的运动能力和灵活性,能够在不同的地形上快速、稳定的运动。与同质量的机器人相比,动物具有更高的运动能效,这对仿生设计具有重要的研究意义。驯鹿是一种典型的多路面迁徙动物,善于在密林、山地、沼泽、冰雪地面中行走和奔跑。驯鹿的四肢相对较短,但蹄子较大,其掌面宽阔。尤其是主蹄和悬蹄,其足底周围生长有许多刚毛。在触地时,能够增大足底与地面的接触面积,减少蹄部因运动所受的冲击载荷,增大与地面的摩擦力。因此,驯鹿在坡地、山丘、崎岖不平的道路上具有节能稳定的行走和奔跑优势。After a long period of evolution, creatures in nature have better athletic ability and flexibility, and can move quickly and stably on different terrains. Compared with robots of the same mass, animals have higher locomotion energy efficiency, which has important research implications for bionic design. Reindeer is a typical multi-surface migratory animal, good at walking and running in dense forests, mountains, swamps, ice and snow. Reindeer have relatively short limbs, but large hooves with broad paws. Especially the main hoof and the overhang hoof have many bristles growing around the soles of the feet. When touching the ground, it can increase the contact area between the sole of the foot and the ground, reduce the impact load on the hoof due to movement, and increase the friction with the ground. Therefore, reindeer have the advantages of energy-saving and stable walking and running on slopes, hills, and rough roads.
发明内容Contents of the invention
本发明的目的是为了提高足式机器人在斜坡上的缓冲、稳定和节能性能,以自然界动物的优越特征为灵感,利用工程仿生学原理,设计了一种仿生机械腿。The purpose of the present invention is to improve the cushioning, stability and energy-saving performance of the legged robot on the slope, and to design a bionic mechanical leg inspired by the superior characteristics of animals in nature and using the principle of engineering bionics.
本发明包括仿生机械腿机构和仿生机械足机构;The invention includes a bionic mechanical leg mechanism and a bionic mechanical foot mechanism;
所述的仿生机械腿机构由活动杆、套筒、避震机构、第一连接杆、第二连接杆、承重杆和弹性绳组成;The bionic mechanical leg mechanism is composed of a movable rod, a sleeve, a shock-absorbing mechanism, a first connecting rod, a second connecting rod, a load-bearing rod and an elastic rope;
所述的仿生机械足机构由上固定支座、张合杆、第一扭簧、下固定支座、滑块、蹄壳、连接支座、足底板、足底垫、悬蹄、关节主轴和第二扭簧组成;活动杆控制机械腿整体的前后活动;第一连接杆、第二连接杆与承重杆组成机械腿的踝关节,与避震机构搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;关节主轴对应驯鹿跖趾关节部分,第一扭簧模拟跖趾关节缓冲的作用;足底板为两个独立部件,安装在承重杆两侧,并且与关节主轴固连,足底板底面作为机械腿的主要触地点,模拟蹄球的曲面结构;悬蹄能绕关节主轴活动,为机械腿提供一定的支持力,提高稳定性;根据提取的驯鹿蹄壳曲线设计了机械腿蹄壳,机械腿蹄壳的蹄边缘和蹄尖处为纵向和锯齿状棱纹结构,提升了机械腿的附着性能。机械腿蹄壳底部安装足底垫,能够减缓地面冲击力;为了实现驯鹿蹄两趾张合的功能,上固定支座、下固定支座、张合杆和滑块组成伸肌腱系统,伸肌腱系统控制蹄壳的张合,以增加机械腿的稳定性;伸肌腱系统在触地期内具有缓冲和节能的作用,仿生机械腿弹性绳模拟驯鹿蹄屈肌腱,仿生机械腿弹性绳上端与第一连接杆相连,仿生机械腿弹性绳末端分别连接两个足底板,通过控制足底板实现缓冲和节能的作用。The bionic mechanical foot mechanism consists of an upper fixed support, a tensioning rod, a first torsion spring, a lower fixed support, a slider, a hoof shell, a connecting support, a sole plate, a sole pad, a suspension shoe, a joint spindle and Composed of the second torsion spring; the movable rod controls the overall forward and backward movement of the mechanical leg; the first connecting rod, the second connecting rod and the load-bearing rod form the ankle joint of the mechanical leg, which is matched with the shock-absorbing mechanism to simulate the kinematic structure characteristics of the reindeer hoof ankle joint , which plays the role of reducing impact and absorbing energy; the joint axis corresponds to the reindeer metatarsophalangeal joint, and the first torsion spring simulates the buffering effect of the metatarsophalangeal joint; the sole plate is two independent parts, installed on both sides of the load-bearing bar, and connected with the joint The main shaft is fixed, and the bottom surface of the sole plate is used as the main contact point of the mechanical leg, simulating the curved surface structure of the hoof; the hoof can move around the joint main shaft, providing a certain support force for the mechanical leg and improving stability; according to the extracted reindeer hoof shell curve The hoof shell of the mechanical leg is designed. The hoof edge and hoof tip of the mechanical leg hoof shell are longitudinal and serrated ribbed structures, which improve the adhesion performance of the mechanical leg. Foot pads are installed at the bottom of the hoof shell of the mechanical leg, which can reduce the impact force on the ground; in order to realize the function of opening and closing the two toes of the reindeer hoof, the upper fixed support, the lower fixed support, the opening and closing rod and the slider form the extensor tendon system, and the extensor tendon The system controls the opening and closing of the hoof shell to increase the stability of the mechanical leg; the extensor tendon system has the function of buffering and energy saving during the ground contact period. The elastic rope of the bionic mechanical leg simulates the flexor tendon of the reindeer hoof. A connecting rod is connected, and the end of the elastic rope of the bionic mechanical leg is respectively connected to two sole plates, and the functions of cushioning and energy saving are realized by controlling the sole plates.
所述的足底垫的硬度为58HA。The hardness of the plantar pad is 58HA.
本发明的有益效果:Beneficial effects of the present invention:
连接杆与承重杆组成机械腿的踝关节,与两组避震搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;由固定支座、张合杆和滑块组成的伸肌腱系统能控制蹄壳的张合,以增加机械腿的稳定性;本发明具有自适应张合机构、四级缓冲系统以及仿生肌腱结构,具有节能、缓冲和稳定的功能。The connecting rod and the load-bearing rod form the ankle joint of the mechanical leg, which is matched with two sets of shock absorbers to simulate the kinematic structure characteristics of the reindeer hoof ankle joint, which plays a role in reducing impact and absorbing energy; it consists of a fixed support, a tension rod and a slider The composed extensor tendon system can control the opening and closing of the hoof shell to increase the stability of the mechanical leg; the invention has an adaptive opening and closing mechanism, a four-level buffer system and a bionic tendon structure, and has the functions of energy saving, buffering and stability.
附图说明Description of drawings
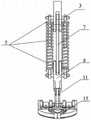
图1是本发明的结构立体图;Fig. 1 is a structural perspective view of the present invention;
图2是本发明的主视图;Fig. 2 is the front view of the present invention;
图3是本发明的俯视图;Fig. 3 is a top view of the present invention;
图4是本发明的侧视图;Fig. 4 is a side view of the present invention;
图5是本发明的仿生机械足结构图;Fig. 5 is a structural diagram of the bionic mechanical foot of the present invention;
图6是本发明的足底垫结构图。Fig. 6 is a structural diagram of the plantar pad of the present invention.
具体实施方式Detailed ways
如图1至图6所示,本发明包括仿生机械腿机构1和仿生机械足机构2;As shown in Figures 1 to 6, the present invention includes a bionic mechanical leg mechanism 1 and a bionic
所述的仿生机械腿机构1由活动杆3、套筒4、避震机构5、第一连接杆6、第二连接杆7、承重杆8和弹性绳9组成;The bionic mechanical leg mechanism 1 is composed of a
所述的仿生机械足机构2由上固定支座10、张合杆11、第一扭簧12、下固定支座13、滑块14、蹄壳15、连接支座16、足底板17、足底垫18、悬蹄19、关节主轴20和第二扭簧21组成;活动杆3控制机械腿整体的前后活动;第一连接杆6、第二连接杆7与承重杆8组成机械腿的踝关节,与避震机构5搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;关节主轴20对应驯鹿跖趾关节部分,第一扭簧12模拟跖趾关节缓冲的作用;足底板17为两个独立部件,安装在承重杆8两侧,并且与关节主轴20固连,足底板17底面作为机械腿的主要触地点,模拟蹄球的曲面结构;悬蹄19能绕关节主轴20活动,为机械腿提供一定的支持力,提高稳定性;根据提取的驯鹿蹄壳曲线设计了机械腿蹄壳15,机械腿蹄壳15的蹄边缘和蹄尖处为纵向和锯齿状棱纹结构,提升了机械腿的附着性能。机械腿蹄壳15底部安装足底垫18,能够减缓地面冲击力;为了实现驯鹿蹄两趾张合的功能,上固定支座10、下固定支座13、张合杆11和滑块14组成伸肌腱系统,伸肌腱系统控制蹄壳15的张合,以增加机械腿的稳定性;伸肌腱系统在触地期内具有缓冲和节能的作用,仿生机械腿弹性绳9模拟驯鹿蹄屈肌腱,仿生机械腿弹性绳9上端与第一连接杆6相连,仿生机械腿弹性绳9末端分别连接两个足底板17,通过控制足底板17实现缓冲和节能的作用。The bionic
所述的足底垫18的硬度为58HA。The hardness of the
本发明的工作过程:Working process of the present invention:
仿生机械腿在触地之前,两蹄壳为闭合状态,承重杆与蹄壳的夹角为165°,连接杆与承重杆的夹角为120°,分别模拟了跖趾关节和踝关节的角度。在触地时,蹄尖最先触地,随着活动杆的转动,蹄壳、足底和悬蹄依次触地。在触地前期,跖趾关节逐渐屈曲,导致张合杆控制滑块沿着蹄壳的滑槽前移,两蹄壳逐渐张开。在触地后期,跖趾关节逐渐伸展,两蹄壳逐渐闭合,实现了蹄壳在触地过程中自动张合的自适应功能,有效提高了机械腿的稳定性。Before the bionic mechanical leg touches the ground, the two hoof shells are closed, the angle between the load-bearing rod and the hoof shell is 165°, and the angle between the connecting rod and the load-bearing rod is 120°, respectively simulating the angles of the metatarsophalangeal joint and the ankle joint . When touching the ground, the tip of the hoof touches the ground first, and as the movable rod rotates, the hoof shell, the sole of the foot and the overhanging hoof touch the ground successively. In the early stage of ground contact, the metatarsophalangeal joints are gradually flexed, causing the opening and closing rod to control the sliding block to move forward along the chute of the hoof shell, and the two hoof shells are gradually opened. In the late stage of ground contact, the metatarsophalangeal joints are gradually stretched, and the two hoof shells are gradually closed, which realizes the self-adaptive function of automatic opening and closing of the hoof shells during the ground touch process, and effectively improves the stability of the mechanical leg.
在触地前期,蹄壳底部的足底垫作为第一级缓冲,率先与地面接触,减缓地面对机械腿的冲击力。随着跖趾关节的屈曲,第一扭簧被压缩从而吸收冲击力,此时第一扭簧作为第二级缓冲。此外,当跖趾关节屈曲时,弹性绳被向下拉伸。在触地中期,踝关节屈曲时弹性绳被向上拉伸,此时弹性绳作为第三级缓冲。当足底接触地面时,踝关节与膝关节开始屈曲,避震弹簧吸收冲击力被压缩,避震作为第四级缓冲。In the early stage of ground contact, the sole pad at the bottom of the hoof shell acts as the first level of cushioning, and is the first to contact the ground to slow down the impact of the ground on the mechanical leg. With the flexion of the metatarsophalangeal joint, the first torsion spring is compressed to absorb the impact force, and at this time the first torsion spring acts as a second-level buffer. Also, when the metatarsophalangeal joint is flexed, the elastic cord is stretched downward. During mid-ground contact, the elastic cord is stretched upward when the ankle is flexed, and the elastic cord acts as a third level of cushioning. When the sole of the foot touches the ground, the ankle joint and knee joint begin to flex, the shock absorber spring absorbs the impact force and is compressed, and the shock absorber acts as the fourth level of buffering.
Claims (2)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211152520.5ACN115339543B (en) | 2022-09-21 | 2022-09-21 | A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope ground |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211152520.5ACN115339543B (en) | 2022-09-21 | 2022-09-21 | A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope ground |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115339543Atrue CN115339543A (en) | 2022-11-15 |
| CN115339543B CN115339543B (en) | 2023-06-20 |
Family
ID=83956854
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211152520.5AActiveCN115339543B (en) | 2022-09-21 | 2022-09-21 | A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope ground |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115339543B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114852210A (en)* | 2022-04-26 | 2022-08-05 | 中国北方车辆研究所 | Occlusable large-gradient bionic foot |
| CN119532361A (en)* | 2024-09-19 | 2025-02-28 | 同济大学 | A bionic vibration isolation system with adjustable mechanical properties and high static and low dynamic performance |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006107329A1 (en)* | 2005-04-01 | 2006-10-12 | Townsend Barry W | Prosthetic foot with tunable performance |
| US20070043449A1 (en)* | 2005-03-31 | 2007-02-22 | Massachusetts Institute Of Technology | Artificial ankle-foot system with spring, variable-damping, and series-elastic actuator components |
| CN102582715A (en)* | 2012-03-15 | 2012-07-18 | 北京航空航天大学 | Mechanical foot device imitating cattle foot |
| US20140148746A1 (en)* | 2010-04-06 | 2014-05-29 | Hosso, Inc. | Limb Protection Device |
| US20160346070A1 (en)* | 2010-04-06 | 2016-12-01 | Hosso, Inc. | Limb protection device |
| CN106184461A (en)* | 2016-07-28 | 2016-12-07 | 吉林大学 | A kind of imitative Ostriches hind leg pedipulator |
| CN106347519A (en)* | 2016-11-13 | 2017-01-25 | 吉林大学 | Self-adaption sand land biomimetic mechanical foot |
| WO2017197674A1 (en)* | 2016-05-17 | 2017-11-23 | 陈旭芳 | Mechanical arm clamp and smart clamp system |
| CN112429105A (en)* | 2020-11-16 | 2021-03-02 | 江苏大学 | Rigid-flexible coupling bionic anti-sinking energy-saving buffering walking wheel |
- 2022
- 2022-09-21CNCN202211152520.5Apatent/CN115339543B/enactiveActive
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070043449A1 (en)* | 2005-03-31 | 2007-02-22 | Massachusetts Institute Of Technology | Artificial ankle-foot system with spring, variable-damping, and series-elastic actuator components |
| WO2006107329A1 (en)* | 2005-04-01 | 2006-10-12 | Townsend Barry W | Prosthetic foot with tunable performance |
| US20140148746A1 (en)* | 2010-04-06 | 2014-05-29 | Hosso, Inc. | Limb Protection Device |
| US20160346070A1 (en)* | 2010-04-06 | 2016-12-01 | Hosso, Inc. | Limb protection device |
| CN102582715A (en)* | 2012-03-15 | 2012-07-18 | 北京航空航天大学 | Mechanical foot device imitating cattle foot |
| WO2017197674A1 (en)* | 2016-05-17 | 2017-11-23 | 陈旭芳 | Mechanical arm clamp and smart clamp system |
| CN106184461A (en)* | 2016-07-28 | 2016-12-07 | 吉林大学 | A kind of imitative Ostriches hind leg pedipulator |
| CN106347519A (en)* | 2016-11-13 | 2017-01-25 | 吉林大学 | Self-adaption sand land biomimetic mechanical foot |
| CN112429105A (en)* | 2020-11-16 | 2021-03-02 | 江苏大学 | Rigid-flexible coupling bionic anti-sinking energy-saving buffering walking wheel |
Non-Patent Citations (2)
| Title |
|---|
| 张澈;陈浩;张群: "一种仿骆驼足的设计与仿真分析", 军民两用技术与产品* |
| 张琪: "山羊足防滑缓冲特性研究与仿生足设计", 中国知网* |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114852210A (en)* | 2022-04-26 | 2022-08-05 | 中国北方车辆研究所 | Occlusable large-gradient bionic foot |
| CN114852210B (en)* | 2022-04-26 | 2023-03-03 | 中国北方车辆研究所 | Occlusable large-gradient bionic foot |
| CN119532361A (en)* | 2024-09-19 | 2025-02-28 | 同济大学 | A bionic vibration isolation system with adjustable mechanical properties and high static and low dynamic performance |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115339543B (en) | 2023-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115339543B (en) | A bionic mechanical leg with buffer, energy-saving and stable functions suitable for slope ground | |
| CN106364587B (en) | A kind of control method of humanoid robot foot section | |
| CN201703452U (en) | Frog leg simulated hopping robot structure | |
| CN101767615A (en) | Leg bouncing mechanism for frog-type robot | |
| CN105292297B (en) | Bionic foot capable of improving gait naturality and stability of biped robot | |
| US5219365A (en) | Prosthetic foot | |
| US6029374A (en) | Shoe and foot prosthesis with bending beam spring structures | |
| JP4185775B2 (en) | Prosthetic leg with adjustable performance | |
| CN106347519B (en) | A kind of adaptive sand ground bionic mechanical foot | |
| US20050005472A1 (en) | Shoe suspension system | |
| JP4195611B2 (en) | Artificial foot | |
| CN110481668B (en) | A bionic robotic foot with self-adaptive attitude change | |
| CN205150019U (en) | Stability of biped robot gait naturality with is improved bionical foot | |
| CN105054482B (en) | There is foot and guide the sport shoes with half sole rebound function and sole thereof | |
| CN106625590B (en) | Energy-saving and buffering and actively anti-depression bionic mechanical foot | |
| JP2007530245A (en) | Function adjustable prosthetic leg | |
| US5376140A (en) | Prosthetic foot | |
| CN101862542B (en) | Robot simulated jump aid | |
| CN203328874U (en) | Artificial human limb | |
| CN109018061B (en) | A Bionics-Based Flexible Passive Foot System | |
| CN108583184A (en) | A kind of imitative kangaroo leg suspension of diamond shape | |
| CN111972776B (en) | A bionic shock-absorbing midsole | |
| CN114802526A (en) | Bionic passive stability-increasing anti-slip foot | |
| US20060137217A1 (en) | Propulsion footwear | |
| CN210082851U (en) | A two-link imitation kangaroo leg suspension |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |