CN115327476A - Station distribution method and system under far-field time difference positioning condition - Google Patents
Station distribution method and system under far-field time difference positioning conditionDownload PDFInfo
- Publication number
- CN115327476A CN115327476ACN202210870569.8ACN202210870569ACN115327476ACN 115327476 ACN115327476 ACN 115327476ACN 202210870569 ACN202210870569 ACN 202210870569ACN 115327476 ACN115327476 ACN 115327476A
- Authority
- CN
- China
- Prior art keywords
- station
- positioning
- target point
- time difference
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription35
- 239000000243solutionSubstances0.000claimsdescription21
- 238000005259measurementMethods0.000claimsdescription18
- 239000012895dilutionSubstances0.000claimsdescription7
- 238000010790dilutionMethods0.000claimsdescription7
- 238000004364calculation methodMethods0.000claimsdescription3
- 238000010276constructionMethods0.000claimsdescription3
- 230000014509gene expressionEffects0.000claimsdescription2
- 238000004590computer programMethods0.000claims2
- 230000000694effectsEffects0.000abstractdescription4
- 230000006870functionEffects0.000description17
- 238000005457optimizationMethods0.000description10
- 239000011159matrix materialSubstances0.000description7
- 238000004422calculation algorithmMethods0.000description5
- 238000010586diagramMethods0.000description3
- 230000007246mechanismEffects0.000description3
- 238000009795derivationMethods0.000description2
- 238000013461designMethods0.000description2
- 230000008569processEffects0.000description2
- 230000005855radiationEffects0.000description2
- 238000004458analytical methodMethods0.000description1
- 230000009286beneficial effectEffects0.000description1
- 230000008859changeEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 238000002474experimental methodMethods0.000description1
- 230000001788irregularEffects0.000description1
- 239000000203mixtureSubstances0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000003287optical effectEffects0.000description1
- 230000000750progressive effectEffects0.000description1
- 238000011160researchMethods0.000description1
- 238000004088simulationMethods0.000description1
Images





Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于目标无源定位技术领域,特别涉及一种远场时差定位条件下布站方法及系统,能够利用时差定位机制来实现接收站布站。The invention belongs to the technical field of target passive positioning, and in particular relates to a method and system for deploying stations under the condition of far-field time difference positioning, which can utilize a time difference positioning mechanism to implement receiving station deployment.
背景技术Background technique
无源定位技术因为被应用在雷达、声呐、无线传感网络等各个领域而被深入研究。其中最常见的机制之一是基于多站时差的无源定位系统,它主要是利用目标信号到不同接收站之间的时间差来进行位置估计,具有很高的定位精度。对于无源定位,接收并分析信号的接收站的站址位置,会影响定位误差,专家学者多对布站问题展开研究。接收站位置的选择,既要考虑对目标定位带来的误差影响情况,也要考虑其可移动的成本问题。Passive positioning technology has been deeply studied because it is applied in various fields such as radar, sonar, and wireless sensor network. One of the most common mechanisms is the passive positioning system based on multi-station time difference, which mainly uses the time difference between the target signal and different receiving stations for position estimation, and has high positioning accuracy. For passive positioning, the location of the receiving station that receives and analyzes the signal will affect the positioning error. Experts and scholars have conducted research on station layout. The selection of the location of the receiving station should not only consider the influence of errors on target positioning, but also consider the cost of its movement.
早在定位算法起步阶段,人们就开始研究最优布站方案,比如研究在测角定位、时差定位等多种情况下站址选择对定位误差的影响大小,给出了接收站站点均匀包围定位源的情况定位效果最好的定性结论。在接收站部署没有约束的条件下,角度均匀地分布在定位点周围的情形下,可以获得最好的定位精度。此后,有人把TDOA的定位模型中融入了距离相关的噪声模型,即测量TDOA值的误差会随着距离的增大而变化,此情形下的定位误差模型会变得复杂,但最终得到的布站规则还是一致的。而在布站的优化算法上,有人建立了联合测时差与测向的传感器优化模型,提出用交叉熵进行组合优化以获得最优布站形式的方法。其次将接收站分为固定站和补充站,引入布尔向量表示,并用区域枚举比较法和迭代交换的贪心算法来求布站最优解。此外,现有的优化算法,对于定位误差建立目标函数,而后利用不同的优化算法得到站址位置的数值解来解决布站问题;它们大多是利用优化理论来找到最好的布站规划方法,来提高布站对定位精度的影响,并没有对站址位置与定位误差的深层关系进行分析。而且这些站址选择主要是没有约束的,即使是不规则区域的站址选择,一般也会使接收站点的位置分散在定位点的周围,这就需要目标辐射源的信号是全向发射的广播信号这一类的。且在真实定位场景中,很难使得分布在目标四周的接收站都接收到同样的信号。因此,亟需一种适用于远场条件下三站时差定位的高精度布站方案,以满足目标精确定位需求。As early as the initial stage of the positioning algorithm, people began to study the optimal station layout scheme, such as studying the influence of station site selection on the positioning error in various situations such as angle measurement positioning and time difference positioning, and the uniform surrounding positioning of receiving station sites is given. Qualitative conclusions that the location of the source is the best. The best positioning accuracy can be obtained under the condition that the receiving station deployment is not constrained and the angles are evenly distributed around the positioning point. Since then, some people have integrated the distance-related noise model into the TDOA positioning model, that is, the error of measuring the TDOA value will change with the increase of the distance. In this case, the positioning error model will become complicated, but the final distribution The site rules are still the same. As for the optimization algorithm of station deployment, someone established a sensor optimization model for joint time difference measurement and direction finding, and proposed a method of combining optimization with cross-entropy to obtain the optimal form of station deployment. Secondly, the receiving station is divided into fixed station and supplementary station, and the Boolean vector representation is introduced, and the optimal solution of station arrangement is obtained by using the area enumeration comparison method and the greedy algorithm of iterative exchange. In addition, the existing optimization algorithms establish the objective function for the positioning error, and then use different optimization algorithms to obtain the numerical solution of the site location to solve the station layout problem; most of them use optimization theory to find the best station layout planning method, To improve the impact of station layout on positioning accuracy, there is no analysis of the deep relationship between station location and positioning error. Moreover, these site selections are mainly unconstrained, even for site selection in irregular areas, generally the positions of the receiving sites will be scattered around the positioning point, which requires the signal of the target radiation source to be an omnidirectional broadcast Signals and such. And in real positioning scenarios, it is difficult to make the receiving stations distributed around the target receive the same signal. Therefore, there is an urgent need for a high-precision station layout solution suitable for three-station time-difference positioning under far-field conditions to meet the needs of precise target positioning.
发明内容Contents of the invention
为此,本发明提供一种远场时差定位条件下布站方法及系统,通过固定副站并利用定位误差曲线和目标速度方向来求解最优主站位置进而实现定位接收站布置,在保证目标定位效果的同时,能够节约布站成本,便于实际场景应用。To this end, the present invention provides a station arrangement method and system under far-field time difference positioning conditions. By fixing the secondary station and using the positioning error curve and the target speed direction to solve the optimal master station position and then realize the positioning receiving station arrangement, while ensuring the target While positioning the effect, it can save the cost of site layout and facilitate the application in actual scenarios.
按照本发明所提供的设计方案,提供一种远场时差定位条件下布站方法,包含如下内容:According to the design scheme provided by the present invention, a station deployment method under far-field time difference positioning conditions is provided, including the following content:
依据定位误差分布来构建二维时差定位模型,将模型中变量转化为目标点与定位接收站夹角参数,利用定位接收站中已知副站位置并通过模型求解来获取最优主站位置;Construct a two-dimensional time difference positioning model based on the positioning error distribution, convert the variables in the model into the angle parameters between the target point and the positioning receiving station, use the known secondary station position in the positioning receiving station and solve the model to obtain the optimal main station position;
针对获取的最优主站位置,利用先验信息的目标点目标速度方向与可布站区域范围来确定定位主站最终位置。For the optimal position of the master station obtained, the final position of the master station is determined by using the target speed direction of the target point and the area where the station can be deployed based on the prior information.
作为本发明中远场时差定位条件下布站方法,进一步地,模型构建中,利用几何精度稀释来作为定位误差分布来表示目标点到各接收站与到第一个接收站之间的距离差;通过将距离差进行微分形式表示来表示远场环境下目标点的定位误差函数,由定位误差函数来构建二维时差定位模型。As the station layout method under the middle and far field time difference positioning conditions of the present invention, further, in the model construction, the geometric precision dilution is used as the positioning error distribution to represent the distance difference between the target point and each receiving station and the first receiving station; The positioning error function of the target point in the far-field environment is expressed by expressing the distance difference in a differential form, and a two-dimensional time difference positioning model is constructed by the positioning error function.
作为本发明中远场时差定位条件下布站方法,进一步,二维时差定位模型表示为



作为本发明中远场时差定位条件下布站方法,进一步,针对二维时差定位模型,针对站址位置函数,将函数中的目标点与接收站的距离变量转化为目标点与定位接收站的夹角参数,使目标定位误差大小与目标点和接收站两者之间的距离差测量误差、相关系数及目标和接收站两者之间的夹角相关。As the station layout method under the mid-to-far field time difference positioning condition of the present invention, further, for the two-dimensional time difference positioning model and the site position function, the distance variable between the target point and the receiving station in the function is converted into the distance between the target point and the positioning receiving station The angle parameter makes the size of the target positioning error related to the distance difference measurement error between the target point and the receiving station, the correlation coefficient and the angle between the target and the receiving station.
作为本发明远场时差定位条件下布站方法,进一步地,设定有两个副站,其与目标点的夹角表示为θ2和θ3,待求解主站与目标点的夹角表示为θ1,模型中关于夹角的计算公式表示为:As the station layout method under the far-field time difference positioning condition of the present invention, further, two secondary stations are set, and the included angles between them and the target point are expressed as θ2 and θ3 , and the included angle between the main station and the target point to be solved is expressed as is θ1 , the formula for calculating the included angle in the model is expressed as:

作为本发明远场时差定位条件下布站方法,进一步地,模型求解中,根据目标点与副站位置来确定目标点与各副站之间的夹角,利用模型中关于夹角的计算公式来获取主站与目标点的夹角θ1,并通过模型求解,依据位置各分量误差总和最小时的站址位置来获取主站最优位置。As the station arrangement method under the far-field time difference positioning condition of the present invention, further, in the model solution, the angle between the target point and each auxiliary station is determined according to the position of the target point and the auxiliary station, and the calculation formula about the included angle in the model is used To obtain the included angle θ1 between the master station and the target point, and through the model solution, the optimal position of the master station can be obtained according to the site position when the sum of the errors of each component of the position is the smallest.
作为本发明远场时差定位条件下布站方法,进一步地,确定定位主站最终位置时,依据主站最优位置中主站与目标点的最优夹角来确定目标点与主站之间的射线,并依据先验信息的目标点目标速度
作为本发明远场时差定位条件下布站方法,进一步地,确定定位主站最终位置时,当θ1小于其他副站与目标点之间的夹角,则依据β-θ1值大小,若β-θ1<180°,则主站位置选择在边界值U1,如果β-θ1>180°,则主站位置选择在边界值U2;当θ1大于其他副站与目标点之间的夹角,则依据β-θ1值大小,若β-θ1<180°,则主站位置选择在边界值U2,如果β-θ1>180°,则主站位置选择在边界值U1。As the station arrangement method under the far-field time difference positioning condition of the present invention, further, when determining the final position of the positioning master station, whenθ1 is smaller than the angle between other secondary stations and the target point, then according to the value of β-θ1 , if β-θ1 <180°, the position of the master station is selected at the boundary value U1 , if β-θ1 >180°, the position of the master station is selected at the boundary value U2 ; when θ1 is greater than the distance between other secondary stations and the target point The angle between them is based on the value of β-θ1. If β-θ1 <180°, the position of the master station is selected at the boundary value U2 . If β-θ1 >180°, the position of the master station is selected at the boundary value U1 .
进一步地,本发明还提供一种远场时差定位条件下布站系统,包含:位置寻优模块和最终输出模块,其中,Further, the present invention also provides a station deployment system under far-field time difference positioning conditions, including: a position optimization module and a final output module, wherein,
位置寻优模块,用于依据定位误差分布来构建二维时差定位模型,将模型中变量转化为目标点与定位接收站夹角参数,利用定位接收站中已知副站位置并通过模型求解来获取最优主站位置;The location optimization module is used to build a two-dimensional time difference positioning model based on the distribution of positioning errors, convert the variables in the model into the angle parameters between the target point and the positioning receiving station, and use the known sub-station positions in the positioning receiving station to solve the model Obtain the optimal master station location;
最终输出模块,用于针对获取的最优主站位置,利用先验信息的目标点目标速度方向与可布站区域范围来确定定位主站最终位置。The final output module is used to determine the final position of the positioning master station by using the target speed direction of the target point and the area where the station can be deployed according to the prior information for the obtained optimal master station position.
本发明的有益效果:Beneficial effects of the present invention:
本发明利用几何精度稀释来描述时差定位的误差,对于远场环境的目标点构造定位误差函数,将函数的变量转化为目标与接收站的角度关系,随后固定接收站系统中的副站,利用函数推导式求解最优主站位置,再引入先验信息的目标速度方向与可布站区域范围,从而确定定位主站的位置,保证目标定位效果的同时,能够节约成本,便于无源定位场景中的应用。The present invention uses geometric precision dilution to describe the time difference positioning error, constructs a positioning error function for the target point in the far field environment, converts the variable of the function into the angle relationship between the target and the receiving station, and then fixes the secondary station in the receiving station system, using The function derivation formula solves the optimal master station position, and then introduces the target speed direction and the area where the station can be deployed, so as to determine the location of the master station, which can save costs while ensuring the target positioning effect, and is convenient for passive positioning scenarios in the application.
附图说明:Description of drawings:
图1为实施例中远场时差定位条件下布站流程示意;Figure 1 is a schematic diagram of the station deployment process under the far-field time difference positioning condition in the embodiment;
图2为实施例中远场定位场景示意图;FIG. 2 is a schematic diagram of a far-field positioning scene in an embodiment;
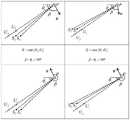
图3为实施例中四种情形下的接收站位置与目标位置关系图;Fig. 3 is the receiving station position and target position relationship figure under four kinds of situations in the embodiment;
图4为实施例中定位误差随主站角度的变化;Fig. 4 is the variation of positioning error with the master station angle in the embodiment;
图5为实施例中不同主站位置点的定位误差曲线。Fig. 5 is the positioning error curves of different master station locations in the embodiment.
具体实施方式:Detailed ways:
为使本发明的目的、技术方案和优点更加清楚、明白,下面结合附图和技术方案对本发明作进一步详细的说明。In order to make the purpose, technical solution and advantages of the present invention more clear and understandable, the present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
本发明实施例,参见图1所示,提供一种远场时差定位条件下布站方法,包含:The embodiment of the present invention, as shown in FIG. 1 , provides a station deployment method under far-field time difference positioning conditions, including:
S101、依据定位误差分布来构建二维时差定位模型,将模型中变量转化为目标点与定位接收站夹角参数,利用定位接收站中已知副站位置并通过模型求解来获取最优主站位置;S101. Construct a two-dimensional time difference positioning model based on the positioning error distribution, convert the variables in the model into the angle parameters between the target point and the positioning receiving station, and use the known secondary station positions in the positioning receiving station to obtain the optimal master station through model solving Location;
S102、针对获取的最优主站位置,利用先验信息的目标点目标速度方向与可布站区域范围来确定定位主站最终位置。S102. Based on the obtained optimal position of the main station, the final position of the positioning main station is determined by using the target speed direction of the target point and the area where the station can be deployed according to the prior information.
通过建立二维平面的时差定位方程,用距离差代替时差来表征三个接收站情形下的定位机制方程;利用几何精度稀释表示定位场景中目标点位置的定位误差,将目标与接收站的位置关系用角度表示,从而转化包含角度关系的误差方程;固定副站后,利用误差关于接收站角度的函数关系求导找出最优的主站所在射线的位置;给出主站的布置区域边界,并将目标的速度方向纳入考虑范围,计算短时间内的主站最优解,结合区域边界最终确定,在保证目标定位精度的同时,便于实施和应用。By establishing the time difference positioning equation of the two-dimensional plane, the distance difference is used instead of the time difference to represent the positioning mechanism equation in the case of three receiving stations; the geometric precision dilution is used to represent the positioning error of the target point position in the positioning scene, and the position of the target and the receiving station The relationship is represented by angle, so as to transform the error equation that includes the angle relationship; after fixing the secondary station, use the function relationship of the error with respect to the angle of the receiving station to find out the optimal position of the ray of the main station; give the layout area boundary of the main station , taking the speed and direction of the target into consideration, calculating the optimal solution of the master station in a short time, combined with the final determination of the area boundary, it is easy to implement and apply while ensuring the accuracy of target positioning.
作为本发明优选方案,进一步地,模型构建中,利用几何精度稀释来作为定位误差分布来表示目标点到各接收站与到第一个接收站之间的距离差;通过将距离差进行微分形式表示来表示远场环境下目标点的定位误差函数,由定位误差函数来构建二维时差定位模型。As a preferred solution of the present invention, further, in the model construction, the geometric precision dilution is used as the positioning error distribution to represent the distance difference between the target point and each receiving station and the first receiving station; To represent the positioning error function of the target point in the far-field environment, the two-dimensional time difference positioning model is constructed by the positioning error function.
考虑常见的二维平面定位问题,本案方案中的时差定位模型可与传统模型是一致,但是在场景设置上稍有不同。主要考虑对远场目标的定位问题,每个定位接收站与目标均为远场关系。参见图2所示,在定位场景中,目标的真实位置u=[x,y]T到各个信号接收站点si=[xi,yi]T,(i=1,2,3)的距离可表示为Considering the common two-dimensional plane positioning problem, the time difference positioning model in this case scheme can be consistent with the traditional model, but the scene setting is slightly different. The problem of positioning the far-field target is mainly considered, and each positioning receiving station has a far-field relationship with the target. Referring to Figure 2, in the positioning scenario, the real position u=[x,y]T of the target to each signal receiving site si =[xi ,yi ]T ,(i=1,2,3) distance can be expressed as

将第1个接收站定位为主参考站,则目标到第i的接收站与第1个接收站的距离差为If the first receiving station is positioned as the main reference station, then the distance difference from the target to the i-th receiving station and the first receiving station is
ri1o=rio-r1o,(i=2,3) (2)ri1o =rio -r1o ,(i=2,3) (2)
所测得的距离差是包含了一定误差ni1(i=2,3)的测量值为The measured distance difference is the measured value including a certain error ni1 (i=2,3)
ri1=c·ti1=ri1o+ni1 (3)ri1 =c·ti1 =ri1o +ni1 (3)
记
r=ro+n (4)r=ro +n (4)
在实际场景中,噪声的具体形式是未知的,但是其协方差矩阵可以获得为In the actual scene, the specific form of the noise is unknown, but its covariance matrix can be obtained as
Qn=E[nnT] (5)Qn =E[nnT ] (5)
对无源定位系统的性能度量通常是利用定位误差来衡量和评估的,描述定位误差的方法有很多。对于传统的二维三站定位问题,几何精度稀释(Geometrical Dilution ofPrecision,GDOP)就可以很好地描述平面中不同位置的误差分布。式(2)中的距离差可以写为The performance measurement of the passive positioning system is usually measured and evaluated by the positioning error, and there are many methods to describe the positioning error. For the traditional two-dimensional three-station positioning problem, Geometrical Dilution of Precision (GDOP) can well describe the error distribution of different positions in the plane. The distance difference in formula (2) can be written as

它的微分形式为Its differential form is

其中,ki=cixdxi+ciydyi,i=1,2,3,且where ki = cix dxi + ciy dyi , i = 1, 2, 3, and

将微分式写为write the differential as
dR=CdX+dXS (8)dR=CdX+dXS (8)
其中,in,

对位置的估计

因此,可以得到定位误差的协方差矩阵为Therefore, the covariance matrix of the positioning error can be obtained as

当不考虑站址测量误差,且距离差的测量误差矩阵由噪声引起时,可以把协方差矩阵写为When the site measurement error is not considered and the measurement error matrix of the distance difference is caused by noise, the covariance matrix can be written as

此时,根据几何精度稀释的定义,由位置各分量的误差总和表示就可以写为At this time, according to the definition of geometric precision dilution, the sum of the errors of each component of the position can be expressed as

寻找最优布站的结果是求解使得
作为本发明优选方案,进一步,针对二维时差定位模型,针对站址位置函数,将函数中的目标点与接收站的距离变量转化为目标点与定位接收站的夹角参数,使目标定位误差大小与目标点和接收站两者之间的距离差测量误差、相关系数及目标和接收站两者之间的夹角相关。As a preferred solution of the present invention, further, for the two-dimensional time difference positioning model, for the station location function, the distance variable between the target point and the receiving station in the function is converted into the angle parameter between the target point and the positioning receiving station, so that the target positioning error The size is related to the distance difference measurement error between the target point and the receiving station, the correlation coefficient and the angle between the target and the receiving station.
参见图2所示,对于二维时差定位模型,假设定位目标点位置为P,部署的第i个接收站与它的夹角为θi,则可以重写C矩阵As shown in Figure 2, for the two-dimensional time difference positioning model, assuming that the position of the positioning target point is P, and the angle between the deployed i-th receiving station and it is θi , then the C matrix can be rewritten

此外,定义k=1η,可以得到

可以推出目标定位的误差大小除了与距离差的测量误差σr和相关系数k有关外,只与目标定位点和三个站址的夹角有关,与目标到接收站的距离无关。It can be deduced that the error of target positioning is not only related to the measurement error σr of the distance difference and the correlation coefficient k, but also to the angle between the target positioning point and the three stations, and has nothing to do with the distance from the target to the receiving station.
结合定位场景,将上式的定位误差进一步具体化。不考虑距离差的测量误差与相关系数,一旦θ2与θ3选定,那么决定目标点的定位误差的只有主站位置决定的θ1。如果确定一个待定位的目标点位置,在定位接收站系统中已经布置好副站S2和S3的位置,那么将有主站S1与目标夹角θ1唯一决定定位误差,而且与它们之间的距离无关。假设时差测量时误差相关系数设置为η=0.5,并对上式中的θ1求导,得到Combined with the positioning scene, the positioning error of the above formula is further specified. Regardless of the measurement error and correlation coefficient of the distance difference, once θ2 and θ3 are selected, only θ1 determined by the position of the master station determines the positioning error of the target point. If the position of a target point to be positioned is determined, and the positions of the secondary stations S2 and S3 have been arranged in the positioning receiving station system, then the angle θ1 between the main station S1 and the target will uniquely determine the positioning error, and the difference between them The distance between them is irrelevant. Assuming that the error correlation coefficient is set to η=0.5 during the time difference measurement, and taking the derivative ofθ1 in the above formula, we get

在远场条件下,



满足上述定位场景的设置,根据目标定位误差的推导和使得误差最小的主站位置最优解,并结合图示中的定位点和定位接收站的实例,下面对本案方案中的布站实时过程做进一步说明:Satisfying the setting of the above positioning scenario, according to the derivation of the target positioning error and the optimal solution of the master station position that minimizes the error, combined with the examples of positioning points and positioning receiving stations in the diagram, the real-time deployment of the station in this case is as follows The process is further explained:
首先,确定一个大致的远场定位点P,并知晓其位置坐标。再确定一个可布站的区域范围,其中设置两个固定定位接收站S2和S3的位置。然后确定接收站主站的可以布置的边界值,角度θ1有一个范围限制,在确定θ1后,由θ1确定的射线与区域边界的交点涉及两个临界值点U1和U2。First, a rough far-field positioning point P is determined, and its position coordinates are known. Then determine an area where stations can be deployed, in which the positions of two fixed positioning receiving stations S2 and S3 are set. Then determine the boundary value that can be arranged for the master station of the receiving station. The angle θ1 has a range limit. After determining θ1 , the intersection point of the ray determined by θ1 and the boundary of the area involves two critical value points U1 and U2 .
其次,根据目标与固定站的位置进行角度计算,获得θ2和θ3值后,由式(14)计算定位点的误差并求出θ1的最优解。Secondly, calculate the angle according to the position of the target and the fixed station. After obtaining the valuesof θ2 andθ3 , the error of the positioning point is calculated by formula (14) and the optimal solution ofθ1 is obtained.
然而,由θ1的最优解是可以确定一条射线的,即确定接收站主站位置的一条射线。此时,可假设由辐射源目标信号的信息,可以预先获取其方向或者根据以往的经验获取。那么如果定位点的目标速度为
进一步地,基于上述的方法,本发明实施例还提供一种远场时差定位条件下布站系统,包含:位置寻优模块和最终输出模块,其中,Furthermore, based on the above method, the embodiment of the present invention also provides a station deployment system under far-field time difference positioning conditions, including: a location optimization module and a final output module, wherein,
位置寻优模块,用于依据定位误差分布来构建二维时差定位模型,将模型中变量转化为目标点与定位接收站夹角参数,利用定位接收站中已知副站位置并通过模型求解来获取最优主站位置;The location optimization module is used to build a two-dimensional time difference positioning model based on the distribution of positioning errors, convert the variables in the model into the angle parameters between the target point and the positioning receiving station, and use the known sub-station positions in the positioning receiving station to solve the model Obtain the optimal master station location;
最终输出模块,用于针对获取的最优主站位置,利用先验信息的目标点目标速度方向与可布站区域范围来确定定位主站最终位置。The final output module is used to determine the final position of the positioning master station by using the target speed direction of the target point and the area where the station can be deployed according to the prior information for the obtained optimal master station position.
为验证验证定位误差变化规律和本案方案的有效性,下面结合实验数据做进一步解释说明:In order to verify the variation law of the positioning error and the effectiveness of the scheme in this case, the following will be further explained in combination with the experimental data:
对于二维定位场景,将目标点与接收站的距离设置在300至500km,假设误差时差测量误差的标准差为1ns。当设置接收站中两个副站位置为(-15,0)km与(15,0)km时,可以根据GDOP公式计算出二维平面内任意位置的定位误差。For the two-dimensional positioning scenario, the distance between the target point and the receiving station is set at 300 to 500 km, and the standard deviation of the error time difference measurement error is assumed to be 1 ns. When the positions of the two secondary stations in the receiving station are set to (-15,0) km and (15,0) km, the positioning error of any position in the two-dimensional plane can be calculated according to the GDOP formula.
图4是选取一个定位点的位置为(400,400)km,使两个副站位置不变,即θ2与θ3的大小不改变,改变θ1的大小,计算出的定位误差曲线。在θ1从36°至56°变化时,定位误差的变化规律呈现在图中,存在两个无穷大点和一个极小值点,在定义域的边界值处取到最小值。同时,仿真实验的结果也说明了主站夹角的取值不能在[min{θ2,θ3},max{θ2,θ3}]内,该范围会使得目标的定位误差较大。Fig. 4 is the positioning error curve calculated by selecting the position of an anchor point as (400,400) km, keeping the positions of the two secondary stations unchanged, that is, the sizes of θ2 and θ3 are not changed, and the size of θ1 is changed. When θ1 changes from 36° to 56°, the changing law of the positioning error is shown in the figure. There are two infinite points and a minimum value point, and the minimum value is taken at the boundary value of the definition domain. At the same time, the results of the simulation experiment also show that the value of the included angle of the master station cannot be within [min{θ2 ,θ3 },max{θ2 ,θ3 }], and this range will make the positioning error of the target larger.
图5是一种远场定位情形,其中假设需要定位的目标点在以900km/h的速度向着β=135°方向匀速移动,那么根据定位点目标的运动状态计算短时(10s)内的误差变化情况,得到距离差测量误差下,定位精度的曲线在图中呈现。与θ1射线上的定位误差相比,当主站位置在U1处时,误差增量比在U2处小,因此,该情形下的主站位置选择应该在U1处。Figure 5 is a far-field positioning situation, in which it is assumed that the target point to be positioned is moving at a constant speed in the direction of β=135° at a speed of 900km/h, then the error within a short time (10s) is calculated according to the motion state of the target at the positioning point The curve of the positioning accuracy under the distance difference measurement error is shown in the figure. Compared with the positioning erroron the θ1 ray, when the master station is at U1, the error increment is smallerthan that at U2. Therefore, the positionof the master station in this situation should be at U1.
通过以上两种实验可说明本案布站方案能够在保证定位精度效果的同时,便于远场定位场景中的实施和应用。Through the above two experiments, it can be shown that the station deployment scheme of this case can not only ensure the effect of positioning accuracy, but also facilitate the implementation and application in far-field positioning scenarios.
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对步骤、数字表达式和数值并不限制本发明的范围。Relative steps, numerical expressions and numerical values of components and steps set forth in these embodiments do not limit the scope of the present invention unless specifically stated otherwise.
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。Each embodiment in this specification is described in a progressive manner, each embodiment focuses on the difference from other embodiments, and the same and similar parts of each embodiment can be referred to each other. As for the system disclosed in the embodiment, since it corresponds to the method disclosed in the embodiment, the description is relatively simple, and for the related information, please refer to the description of the method part.
结合本文中所公开的实施例描述的各实例的单元及方法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已按照功能一般性地描述了各示例的组成及步骤。这些功能是以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。本领域普通技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不认为超出本发明的范围。The units and method steps of the examples described in conjunction with the embodiments disclosed herein can be implemented by electronic hardware, computer software, or a combination of the two. In order to clearly illustrate the interchangeability of hardware and software, in the above description The composition and steps of each example have been generally described in terms of functions. Whether these functions are performed by hardware or software depends on the specific application and design constraints of the technical solution. Those of ordinary skill in the art may use different methods to implement the described functions for each particular application, but such implementation is not considered to exceed the scope of the present invention.
本领域普通技术人员可以理解上述方法中的全部或部分步骤可通过程序来指令相关硬件完成,所述程序可以存储于计算机可读存储介质中,如:只读存储器、磁盘或光盘等。可选地,上述实施例的全部或部分步骤也可以使用一个或多个集成电路来实现,相应地,上述实施例中的各模块/单元可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。本发明不限制于任何特定形式的硬件和软件的结合。Those of ordinary skill in the art can understand that all or part of the steps in the above method can be completed by instructing relevant hardware through a program, and the program can be stored in a computer-readable storage medium, such as: a read-only memory, a magnetic disk or an optical disk, and the like. Optionally, all or part of the steps in the above embodiments can also be implemented using one or more integrated circuits. Correspondingly, each module/unit in the above embodiments can be implemented in the form of hardware, or can be implemented in the form of software function modules. The form is realized. The present invention is not limited to any specific combination of hardware and software.
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。Finally, it should be noted that: the above-described embodiments are only specific implementations of the present invention, used to illustrate the technical solutions of the present invention, rather than limiting them, and the scope of protection of the present invention is not limited thereto, although referring to the foregoing The embodiment has described the present invention in detail, and those skilled in the art should understand that any person familiar with the technical field can still modify the technical solutions described in the foregoing embodiments within the technical scope disclosed in the present invention Changes can be easily thought of, or equivalent replacements are made to some of the technical features; and these modifications, changes or replacements do not make the essence of the corresponding technical solutions deviate from the spirit and scope of the technical solutions of the embodiments of the present invention, and should be included in the scope of the present invention within the scope of protection. Therefore, the protection scope of the present invention should be based on the protection scope of the claims.
Claims (10)






Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210870569.8ACN115327476B (en) | 2022-07-23 | 2022-07-23 | Station deployment method and system under far-field time difference positioning conditions |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210870569.8ACN115327476B (en) | 2022-07-23 | 2022-07-23 | Station deployment method and system under far-field time difference positioning conditions |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115327476Atrue CN115327476A (en) | 2022-11-11 |
| CN115327476B CN115327476B (en) | 2025-03-21 |
Family
ID=83919094
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210870569.8AActiveCN115327476B (en) | 2022-07-23 | 2022-07-23 | Station deployment method and system under far-field time difference positioning conditions |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115327476B (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050035897A1 (en)* | 2003-08-14 | 2005-02-17 | Sensis Corporation | Target localization using TDOA distributed antenna |
| CN104519570A (en)* | 2014-12-17 | 2015-04-15 | 天津工业大学 | Two-dimensional TDOA cooperative node deployment method based on radio frequency identification technology |
| CN106842118A (en)* | 2016-12-23 | 2017-06-13 | 安徽四创电子股份有限公司 | For the time difference positioning method of Distributed Multi positioning monitoring system |
| CN106872942A (en)* | 2016-12-23 | 2017-06-20 | 安徽四创电子股份有限公司 | For the positioning precision calculation method of Distributed Multi positioning monitoring system |
| CN109001672A (en)* | 2018-06-14 | 2018-12-14 | 中国人民解放军战略支援部队信息工程大学 | A kind of time difference frequency difference method for parameter estimation and device |
| CN109974648A (en)* | 2019-04-02 | 2019-07-05 | 西北工业大学 | Evaluation Method of Micro-hole Geometric Accuracy Based on Coordinate Value |
| CN110794391A (en)* | 2019-10-12 | 2020-02-14 | 中国人民解放军空军预警学院 | Passive positioning optimization station distribution method based on unmanned aerial vehicle cluster networking platform |
- 2022
- 2022-07-23CNCN202210870569.8Apatent/CN115327476B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050035897A1 (en)* | 2003-08-14 | 2005-02-17 | Sensis Corporation | Target localization using TDOA distributed antenna |
| CN104519570A (en)* | 2014-12-17 | 2015-04-15 | 天津工业大学 | Two-dimensional TDOA cooperative node deployment method based on radio frequency identification technology |
| CN106842118A (en)* | 2016-12-23 | 2017-06-13 | 安徽四创电子股份有限公司 | For the time difference positioning method of Distributed Multi positioning monitoring system |
| CN106872942A (en)* | 2016-12-23 | 2017-06-20 | 安徽四创电子股份有限公司 | For the positioning precision calculation method of Distributed Multi positioning monitoring system |
| CN109001672A (en)* | 2018-06-14 | 2018-12-14 | 中国人民解放军战略支援部队信息工程大学 | A kind of time difference frequency difference method for parameter estimation and device |
| CN109974648A (en)* | 2019-04-02 | 2019-07-05 | 西北工业大学 | Evaluation Method of Micro-hole Geometric Accuracy Based on Coordinate Value |
| CN110794391A (en)* | 2019-10-12 | 2020-02-14 | 中国人民解放军空军预警学院 | Passive positioning optimization station distribution method based on unmanned aerial vehicle cluster networking platform |
Non-Patent Citations (2)
| Title |
|---|
| K. C. HO: ""An Accurate Algebraic Solution for Moving Source Location Using TDOA and FDOA Measurements"", 《IEEE TRANSACTIONS ON SIGNAL PROCESSING》, 31 December 2004 (2004-12-31), pages 2453 - 2463* |
| XINPENG FANG 等: ""Optimal AOA Sensor-Source Geometry With Deployment Region Constraints"", 《IEEE COMMUNICATIONS LETTERS》, 30 April 2022 (2022-04-30), pages 793 - 797* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115327476B (en) | 2025-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110673089A (en) | Positioning method based on arrival time under unknown line-of-sight and non-line-of-sight distribution condition | |
| CN107271957A (en) | Indoor 3-D positioning method based on TDOA and TOA | |
| CN114513849A (en) | Outdoor non-line-of-sight propagation single-station positioning method based on scattering region model | |
| CN112702699A (en) | Indoor positioning method fusing UWB and LiDAR | |
| CN107977486B (en) | A method and system for order expansion of spherical crown harmonic model of earth disturbance gravitational field | |
| CN111323746B (en) | Direction-equivalent time delay difference passive positioning method for double circular arrays | |
| Qu et al. | New three-dimensional positioning algorithm through integrating TDOA and Newton’s method | |
| CN111598235A (en) | Bayes regularization back propagation neural network coordinate conversion method and device | |
| CN113345005B (en) | A finite random search method suitable for solving the target ball center | |
| Ding et al. | A common points selection method based on the uniformity of FLTMMS for pre-alignment of particle accelerators | |
| Hu et al. | Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing | |
| Adiyatma et al. | Regression-based path loss model correction to construct fingerprint database for indoor localization | |
| CN115327476A (en) | Station distribution method and system under far-field time difference positioning condition | |
| CN115508774B (en) | Time difference positioning method and device based on two-step weighted least square and storage medium | |
| CN110673088B (en) | Time-of-arrival-based object localization in mixed line-of-sight and non-line-of-sight environments | |
| Chen et al. | Initialization-free method for three dimensional source localization under stratification effect | |
| Qi et al. | Channel modeling based on 3D scenario information for V2I communications | |
| Arsan | Accurate indoor positioning with ultra-wide band sensors | |
| Cameron | FDOA-based passive source localization: A geometric perspective | |
| CN106815607A (en) | A kind of isogram based on anti-distance weighting interpolation inverse function is as data extraction method | |
| CN114895240B (en) | Robust node deployment and selection method in TDOA positioning | |
| Dong et al. | Indoor robot localization combining feature clustering with wireless sensor network | |
| CN116736219A (en) | Passive TDOA-FDOA joint positioning optimization method based on improved particle swarm algorithm | |
| CN110087307A (en) | Based on the modified underwater sensor network localization method of ranging | |
| Peng et al. | BDS‐3 Broadcast Ephemeris Orbit Correction Model Based on Improved PSO Combined with BP Neural Network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | Country or region after:China Address after:450000 Science Avenue 62, Zhengzhou High-tech Zone, Henan Province Applicant after:Information Engineering University of the Chinese People's Liberation Army Cyberspace Force Address before:No. 62 Science Avenue, High tech Zone, Zhengzhou City, Henan Province Applicant before:Information Engineering University of Strategic Support Force,PLA Country or region before:China | |
| CB02 | Change of applicant information | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |