CN115238366A - An online detection emergency warning method and system for AI smart cable tunnel - Google Patents
An online detection emergency warning method and system for AI smart cable tunnelDownload PDFInfo
- Publication number
- CN115238366A CN115238366ACN202211139420.9ACN202211139420ACN115238366ACN 115238366 ACN115238366 ACN 115238366ACN 202211139420 ACN202211139420 ACN 202211139420ACN 115238366 ACN115238366 ACN 115238366A
- Authority
- CN
- China
- Prior art keywords
- information
- inspection
- online
- early warning
- simulation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/13—Architectural design, e.g. computer-aided architectural design [CAAD] related to design of buildings, bridges, landscapes, production plants or roads
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/18—Network design, e.g. design based on topological or interconnect aspects of utility systems, piping, heating ventilation air conditioning [HVAC] or cabling
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G1/00—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G9/00—Installations of electric cables or lines in or on the ground or water
- H02G9/08—Installations of electric cables or lines in or on the ground or water in tunnels
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2113/00—Details relating to the application field
- G06F2113/16—Cables, cable trees or wire harnesses
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Computational Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Architecture (AREA)
- Computer Networks & Wireless Communication (AREA)
- Manipulator (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及电力系统监视技术领域,具体涉及一种AI智能电缆隧道的在线检测应急预警方法及系统。The invention relates to the technical field of power system monitoring, in particular to an on-line detection emergency early warning method and system for an AI smart cable tunnel.
背景技术Background technique
电能可以很容易地转变为机械能、光能、热能及化学能等常用的能源,使用方便,电缆作为电能的转送传送载体,电缆隧道用于敷设电缆的隧道,将电缆放置到预先设置好的路径上布设输电线路,电缆隧道布设工程点多面广,以满足人们对电力需求。Electric energy can be easily converted into commonly used energy such as mechanical energy, light energy, thermal energy and chemical energy, which is easy to use. The cable is used as the transmission carrier of electric energy. The cable tunnel is used for laying the cable tunnel, and the cable is placed in the preset path Power transmission lines and cable tunnels are laid out on a wide range of sites to meet people's demand for electricity.
电缆隧道外力破坏点多面广、随意性、突发性强,为防止电缆外破事故(工地挖掘电缆外破事故、机械挖掘电缆外破事故、非法入侵电缆外破事故)的发生,需要对应提高电缆监测力度,在发生电缆外力破坏问题的初期,通过电缆监测结果,生成异常警示信号,以实现及时排除电缆破坏事故的目标。The external force damage points of cable tunnels are wide-ranging, random, and sudden. In order to prevent the occurrence of external cable damage accidents (external damage of cables during construction site excavation, external damage of cables during mechanical excavation, and external damage of cables through illegal intrusion), it is necessary to increase correspondingly. Cable monitoring strength, in the early stage of cable damage caused by external force, generates abnormal warning signals through the cable monitoring results, so as to achieve the goal of eliminating cable damage accidents in time.
一般的,通过定期巡查,对电缆进行检测维护,但电缆隧道大多建于人口分布密度低的区域,人工巡检人员劳动强度高且电缆监测力度难以保障,输电线路的巡检工作对电力系统的稳定运行提供基础,通过AI智能电力巡检机器人,进行在线检测,可以有效提升巡检效率。Generally, cables are inspected and maintained through regular inspections, but cable tunnels are mostly built in areas with low population density. Manual inspection personnel are labor-intensive and cable monitoring is difficult to ensure. Inspection of transmission lines has a negative impact on the power system. The stable operation provides the foundation. Through the AI intelligent power inspection robot, online inspection can effectively improve the inspection efficiency.
机器人对现场数据进行实时采集,在机器人规划路线中,不同位置机器人的行进姿态可能不同,无法保证机器人采集输出的稳定性。The robot collects on-site data in real time. In the robot planning route, the walking posture of the robot at different positions may be different, and the stability of the robot's collection output cannot be guaranteed.
现有技术中存在电缆监测力度不达标且电缆破坏事故频发,导致无法保障电力系统运行的稳定性的技术问题。In the prior art, there are technical problems that the monitoring strength of the cables is not up to standard and the cable damage accidents occur frequently, resulting in the inability to guarantee the stability of the operation of the power system.
发明内容SUMMARY OF THE INVENTION
本发明要解决的技术问题是提供一种AI智能电缆隧道的在线检测应急预警方法及系统,可以提高电缆监测力度,及时进行异常警示,提前排除电缆破坏事故,保障电力系统运行的稳定性。The technical problem to be solved by the present invention is to provide an AI smart cable tunnel online detection emergency early warning method and system, which can improve the cable monitoring strength, timely perform abnormal warnings, eliminate cable damage accidents in advance, and ensure the stability of power system operation.
鉴于上述问题,本发明提供了一种AI智能电缆隧道的在线检测应急预警方法及系统。In view of the above problems, the present invention provides an on-line detection emergency early warning method and system for an AI smart cable tunnel.
本发明的第一个方面,提供了一种AI智能电缆隧道的在线检测应急预警方法,其中,所述方法应用于应急预警系统,所述系统与云处理器通信连接,所述方法包括:在所述电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;基于所述电力巡检机器人,进行数据采集,获取在线巡检信息集;通过所述电缆隧道的设计图,对关键输电设备进行标记,获取标记检测位置信息;基于所述应急预警系统,进行历史数据提取,获取在线巡检历史信息集;通过所述在线巡检历史信息集与所述在线巡检信息集,进行比对分析,获取巡检比对信息;通过所述标记检测位置信息与所述巡检比对信息,结合基本量调整所得历史外破预警维护记录,获取异常比对结果;基于所述云处理器,将所述电缆隧道的设计图还原导入,获取电缆隧道输电仿真图;基于电缆隧道输电仿真图,通过所述巡检布控分布信息与所述在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图;通过所述电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果;将所述异常模拟结果下发至所述应急预警系统,通过所述异常比对结果与所述异常模拟结果,获取电缆隧道的在线检测应急预警信息。A first aspect of the present invention provides an online detection emergency early warning method for AI smart cable tunnels, wherein the method is applied to an emergency early warning system, the system is communicatively connected to a cloud processor, and the method includes: In the cable tunnel, the power inspection robot is deployed and controlled to obtain the distribution information of inspection deployment; based on the power inspection robot, data collection is performed to obtain the online inspection information set; through the design drawing of the cable tunnel, the The key power transmission equipment is marked to obtain the marking detection position information; based on the emergency early warning system, historical data extraction is performed to obtain the online inspection history information set; through the online inspection history information set and the online inspection information set, Carry out comparative analysis to obtain inspection and comparison information; obtain abnormal comparison results based on the location information of the mark detection and the inspection and comparison information, combined with the historical external break warning and maintenance records obtained by adjusting the basic amount; The processor restores and imports the design drawing of the cable tunnel, and obtains the simulation diagram of the power transmission of the cable tunnel; based on the simulation diagram of the power transmission of the cable tunnel, the parameters are restored through the distribution information of the inspection, deployment and control and the online inspection information set, and the obtained The cable tunnel power transmission simulation simulation diagram; through the cable tunnel power transmission simulation simulation diagram, the simulation simulation operation is performed to obtain abnormal simulation results; the abnormal simulation results are sent to the emergency early warning system, and the abnormal comparison results are compared with the results. The abnormal simulation result obtains the online detection emergency warning information of the cable tunnel.
本发明的第二个方面,提供了一种AI智能电缆隧道的在线检测应急预警系统,其中,所述系统包括:布控分布获取单元,所述布控分布获取单元用于在所述电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;数据采集单元,所述数据采集单元用于基于所述电力巡检机器人,进行数据采集,获取在线巡检信息集;设备标记单元,所述设备标记单元用于通过所述电缆隧道的设计图,对关键输电设备进行标记,获取标记检测位置信息;数据提取单元,所述数据提取单元用于基于应急预警系统,进行历史数据提取,获取在线巡检历史信息集;比对分析单元,所述比对分析单元用于通过所述在线巡检历史信息集与所述在线巡检信息集,进行比对分析,获取巡检比对信息;比对结果获取单元,所述比对结果获取单元用于通过所述标记检测位置信息与所述巡检比对信息,结合基本量调整所得历史外破预警维护记录,获取异常比对结果;电缆仿真导入单元,所述电缆仿真导入单元用于基于云处理器,将所述电缆隧道的设计图还原导入,获取电缆隧道输电仿真图;参数仿真单元,所述参数仿真单元用于基于电缆隧道输电仿真图,通过所述巡检布控分布信息与所述在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图;仿真运行单元,所述仿真运行单元用于通过所述电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果;应急预警单元,所述应急预警单元用于将所述异常模拟结果下发至应急预警系统,通过所述异常比对结果与所述异常模拟结果,获取电缆隧道的在线检测应急预警信息。A second aspect of the present invention provides an AI smart cable tunnel online detection emergency early warning system, wherein the system includes: a deployment control distribution acquisition unit, the deployment control distribution acquisition unit is used for, in the cable tunnel, The power inspection robot is deployed and controlled, and the distribution information of the inspection deployment and control is obtained; the data acquisition unit is used to collect data based on the power inspection robot, and obtain the online inspection information set; the equipment marking unit, the The equipment marking unit is used to mark the key power transmission equipment through the design drawing of the cable tunnel, and obtain the marking detection position information; the data extraction unit is used for extracting historical data based on the emergency early warning system, and obtaining an online inspection history information set; a comparison and analysis unit, the comparison and analysis unit is configured to perform comparison and analysis through the online inspection history information set and the online inspection information set to obtain inspection comparison information; A comparison result obtaining unit, which is used for obtaining an abnormal comparison result by detecting the position information of the mark and the inspection comparison information, combined with the historical external break warning and maintenance records obtained by adjusting the basic quantity; A simulation import unit, which is used for restoring and importing the design drawing of the cable tunnel based on the cloud processor, and obtaining a simulation diagram of the cable tunnel power transmission; a parameter simulation unit, the parameter simulation unit is used for power transmission based on the cable tunnel A simulation diagram, through the distribution information of inspection, deployment and control and the online inspection information set, to restore parameters to obtain a simulation diagram of power transmission in a cable tunnel; a simulation operation unit, the simulation operation unit is used to simulate power transmission through the cable tunnel Simulation diagram, perform simulation simulation operation, and obtain abnormal simulation results; emergency early warning unit, the emergency early warning unit is used to send the abnormal simulation results to the emergency early warning system, and compare the abnormal results with the abnormal simulation results. , to obtain the online detection and emergency warning information of the cable tunnel.
本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:One or more technical solutions provided in the present invention have at least the following technical effects or advantages:
由于采用了在电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;基于电力巡检机器人,进行数据采集,获取在线巡检信息集;通过电缆隧道的设计图,对关键输电设备进行标记,获取标记检测位置信息,基于所述应急预警系统,进行历史数据提取,获取在线巡检历史信息集,结合所述在线巡检信息集,进行比对分析,获取巡检比对信息,结合所述标记检测位置信息与基本量调整所得历史外破预警维护记录,获取异常比对结果;基于云处理器,将电缆隧道的设计图还原导入,获取电缆隧道输电仿真图,通过巡检布控分布信息与在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果,结合异常比对结果,获取电缆隧道的在线检测应急预警信。本发明通过电力巡检机器人,高效进行电缆维检,达到了提高电缆监测力度,及时进行异常警示,提前排除电缆破坏事故,保障电力系统运行的稳定性的技术效果。Due to the deployment and control of the power inspection robot in the cable tunnel, the distribution information of inspection and control is obtained; based on the power inspection robot, data collection is performed to obtain the online inspection information set; through the design drawing of the cable tunnel, the key power transmission The equipment is marked, and the information of the detection position of the mark is obtained. Based on the emergency early warning system, historical data extraction is performed, and an online inspection historical information set is obtained. Combined with the online inspection information set, a comparison analysis is performed to obtain the inspection comparison information. , combining the detection position information of the mark and the historical external break warning and maintenance records obtained from the adjustment of the basic quantity, to obtain the abnormal comparison result; based on the cloud processor, restore and import the design drawing of the cable tunnel, obtain the power transmission simulation diagram of the cable tunnel, and pass the inspection. Arrangement and distribution information and online inspection information set, carry out parameter restoration, obtain cable tunnel transmission simulation simulation diagram, carry out simulation simulation operation, obtain abnormal simulation results, and combine the abnormal comparison results to obtain the online detection emergency warning letter of cable tunnel. The invention uses the power inspection robot to efficiently carry out cable maintenance inspection, and achieves the technical effects of improving cable monitoring strength, timely warning of abnormality, eliminating cable damage accidents in advance, and ensuring the stability of power system operation.
附图说明Description of drawings
图1为本发明一种AI智能电缆隧道的在线检测应急预警方法的流程示意图;1 is a schematic flowchart of an on-line detection emergency early warning method for an AI smart cable tunnel of the present invention;
图2为本发明一种AI智能电缆隧道的在线检测应急预警方法的生成在线巡检信息集的流程示意图;2 is a schematic flow chart of generating an online inspection information set for an online detection emergency early warning method of an AI smart cable tunnel according to the present invention;
图3为本发明一种AI智能电缆隧道的在线检测应急预警方法的获取异常比对结果的流程示意图;3 is a schematic flowchart of obtaining an abnormal comparison result of an online detection emergency early warning method for an AI smart cable tunnel according to the present invention;
图4为本发明一种AI智能电缆隧道的在线检测应急预警系统的结构示意图。FIG. 4 is a schematic structural diagram of an on-line detection emergency warning system of an AI smart cable tunnel according to the present invention.
附图标记说明:布控分布获取单元11,数据采集单元12,设备标记单元13,数据提取单元14,比对分析单元15,比对结果获取单元16,电缆仿真导入单元17,参数仿真单元18,仿真运行单元19,应急预警单元20。Reference numeral description: deployment control
具体实施方式Detailed ways
本发明通过提供了一种AI智能电缆隧道的在线检测应急预警方法及系统,解决了电缆监测力度不达标且电缆破坏事故频发,导致无法保障电力系统运行的稳定性的技术问题,达到了提高电缆监测力度,及时进行异常警示,提前排除电缆破坏事故,保障电力系统运行的稳定性的技术效果。The present invention solves the technical problems that the cable monitoring strength is not up to standard and the cable damage accidents occur frequently, which leads to the inability to guarantee the stability of the power system operation by providing an AI intelligent cable tunnel online detection emergency early warning method and system, and achieves improved performance. The strength of cable monitoring, timely warning of abnormality, eliminating cable damage accidents in advance, and ensuring the technical effect of the stability of power system operation.
实施例一Example 1
如图1所示,本发明提供了一种AI智能电缆隧道的在线检测应急预警方法,其中,所述方法应用于应急预警系统,所述系统与云处理器通信连接,所述方法包括:As shown in FIG. 1 , the present invention provides an emergency early warning method for online detection of AI smart cable tunnels, wherein the method is applied to an emergency early warning system, and the system is communicatively connected to a cloud processor, and the method includes:
步骤S100:在所述电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;Step S100: in the cable tunnel, deploy and control the electric power inspection robot, and obtain the distribution information of inspection and deployment;
步骤S200:基于所述电力巡检机器人,进行数据采集,获取在线巡检信息集;Step S200: Based on the power inspection robot, data collection is performed to obtain an online inspection information set;
具体而言,所述电缆隧道即用于铺设电缆的隧道,因隧道能更好地保护电缆,便于进行电缆维检,广泛使用于大规模电力传输,但是,电缆隧道大都位于人烟稀少的位置,电缆监测力度不达标,在电缆隧道投入运行之前,需要先进行整体监测维护,再投入电缆隧道使用,电缆隧道使用便捷度低,因工地挖掘、机械挖掘、非法入侵导致电缆遭到破坏的事故频发,基于AI智能电力巡检机器人,进行在线巡检分析,保证电缆隧道使用的便捷度。Specifically, the cable tunnel is a tunnel used for laying cables. Because the tunnel can better protect the cable and facilitate cable maintenance and inspection, it is widely used in large-scale power transmission. However, most cable tunnels are located in sparsely populated locations. The monitoring strength is not up to the standard. Before the cable tunnel is put into operation, it is necessary to carry out overall monitoring and maintenance, and then put the cable tunnel into use. The cable tunnel is not easy to use, and the accident of cable damage due to site excavation, mechanical excavation and illegal intrusion occurs frequently. , Based on AI intelligent power inspection robot, online inspection and analysis are carried out to ensure the convenience of cable tunnel use.
具体而言,在电缆隧道中,对电力巡检机器人进行布控,所述布控通过巡检范围进行限定,具体需要结合应急预警系统相关管理人员进行对照设定,通过设定合理的巡检范围,保证巡检区域内器件的检测周期频次,简单来说,巡检范围对应的面积大,电力巡检机器人完成单次巡检需要的时间周期长,设定合理的巡检范围,以支持巡检范围内器件的检测周期频次满足巡检需求,通过系统相关管理人员设定合理的巡检范围,获取巡检布控分布信息,为保证电力巡检机器人巡检所得所述信息的有效性提供支持,提高采集数据的可靠性。Specifically, in the cable tunnel, the power inspection robot is deployed and controlled. The deployment and control are limited by the inspection range. Specifically, it needs to be set in combination with the relevant management personnel of the emergency early warning system. By setting a reasonable inspection range, Ensure the inspection cycle frequency of devices in the inspection area. In short, the area corresponding to the inspection range is large, and the time period required for the power inspection robot to complete a single inspection is long. Set a reasonable inspection range to support the inspection. The inspection cycle frequency of the devices within the range meets the inspection requirements. The relevant management personnel of the system set a reasonable inspection range to obtain the distribution information of inspection deployment and control, so as to provide support for ensuring the validity of the information obtained from the inspection of the power inspection robot. Improve the reliability of collected data.
具体而言,基于所述电子巡检机器人内置的检测装置,进行数据采集,所述电子巡检机器人为可自主规划行进方案的全自动巡检机器人,具备跨越障碍物的功能,所述电子巡检机器人集成数据采集装置,所述数字采集装置部分包含红外相机、电路检测装置、微震检测设备和机器视觉检测(可以是三维激光扫描仪)等多种传感器,通过所述电子巡检机器人集成数据采集装置,进行数据采集,获取在线巡检信息集,所述在线巡检信息集包括输电线路检测信息、绝缘子检测信息、线路接头检测信息,保证在线巡检信息的完整性,为后续进行数据分析提供支持,为提高应急预警信息的精度提供数据基础。Specifically, data collection is performed based on the built-in detection device of the electronic inspection robot. The electronic inspection robot is a fully automatic inspection robot that can independently plan a travel plan, and has the function of crossing obstacles. Inspection robot integrated data acquisition device, the digital acquisition device part includes infrared cameras, circuit detection devices, microseismic detection equipment and machine vision detection (can be a three-dimensional laser scanner) and other sensors, through the electronic inspection robot integrated data The collection device performs data collection and obtains an online inspection information set, the online inspection information set includes transmission line detection information, insulator detection information, and line joint detection information, so as to ensure the integrity of the online inspection information for subsequent data analysis. Provide support and provide a data basis for improving the accuracy of emergency early warning information.
进一步的,如图2所示,基于所述电力巡检机器人,进行数据采集,获取在线巡检信息集,所述步骤S200包括:Further, as shown in FIG. 2 , based on the power inspection robot, data collection is performed to obtain an online inspection information set, and the step S200 includes:
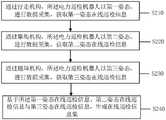
步骤S210:通过行走机构,所述电力巡检机器人以第一姿态,进行数据采集,获取第一姿态在线巡检信息;Step S210: through the walking mechanism, the electric power inspection robot performs data collection in a first posture, and obtains online inspection information in the first posture;
步骤S220:通过攀爬机构,所述电力巡检机器人以第二姿态,进行数据采集,获取第二姿态在线巡检信息;Step S220: through the climbing mechanism, the electric power inspection robot performs data collection in the second posture, and obtains online inspection information in the second posture;
步骤S230:通过越障机构,所述电力巡检机器人以第三姿态,进行数据采集,获取第三姿态在线巡检信息;Step S230: Through the obstacle crossing mechanism, the electric power inspection robot performs data collection in a third attitude, and obtains online inspection information in the third attitude;
步骤S240:基于所述第一姿态在线巡检信息、第二姿态在线巡检信息与第三姿态在线巡检信息,生成在线巡检信息集。Step S240: Generate an online inspection information set based on the online inspection information of the first attitude, the online inspection information of the second attitude, and the online inspection information of the third attitude.
具体而言,在检测的全阶段,不可避免的,因网络延迟、通信故障、数据类型多样等因素,存在数据分布混乱的现象,通过行进方案,确定标记信息,对在线巡检信息集数据分布进行限定调整,为后续进行异常比对分析提供支持。Specifically, in the whole stage of detection, it is unavoidable that due to factors such as network delay, communication failure, and various data types, the phenomenon of data distribution is chaotic. Make limit adjustments to provide support for subsequent abnormal comparison analysis.
具体而言,所述电力巡检机器人的自主行进机构(“机构”即机械结构的简称)包括行走机构、攀爬机构和越障机构,在所述电力巡检机器人自主规划的行进方案中,进行姿态模拟,确定第一姿态、第二姿态与第三姿态,在电力巡检机器人处于第一姿态阶段,行走机构执行规划的行进方案,在第一姿态下,进行数据采集,获取第一姿态在线巡检信息;在电力巡检机器人处于第二姿态阶段,攀爬机构执行规划的行进方案,在第二姿态下,进行数据采集,获取第二姿态在线巡检信息;在电力巡检机器人处于第三姿态阶段,越障机构执行规划的行进方案,在第三姿态下,进行数据采集,获取第三姿态在线巡检信息,通过所述第一姿态在线巡检信息、第二姿态在线巡检信息与第三姿态在线巡检信息,确定在线巡检信息集的标记信息,基于所述在线巡检信息集的标记信息,将输电线路检测信息、绝缘子检测信息、线路接头检测信息进行合并,生成在线巡检信息集,为保证所述生成在线巡检信息集数据信息的有序性提供支持,保证生成在线巡检信息集数据分布的稳定性。Specifically, the autonomous traveling mechanism of the electric inspection robot (“mechanism” is the abbreviation of the mechanical structure) includes a walking mechanism, a climbing mechanism and an obstacle-crossing mechanism. In the traveling plan autonomously planned by the electric inspection robot, Perform attitude simulation to determine the first attitude, the second attitude and the third attitude. When the power inspection robot is in the first attitude stage, the walking mechanism executes the planned travel plan. In the first attitude, data collection is performed to obtain the first attitude. Online inspection information; when the power inspection robot is in the second attitude stage, the climbing mechanism executes the planned travel plan, and in the second attitude, data collection is performed to obtain the online inspection information of the second attitude; when the power inspection robot is in the second attitude In the third attitude stage, the obstacle crossing mechanism executes the planned travel plan, and in the third attitude, data collection is performed to obtain the online inspection information of the third attitude, and the online inspection information of the first attitude and the online inspection of the second attitude are obtained through the online inspection information of the first attitude and the online inspection of the second attitude. information and the online inspection information of the third attitude, determine the marking information of the online inspection information set, and combine the transmission line detection information, insulator detection information, and line joint detection information based on the marking information of the online inspection information set to generate The online inspection information set provides support for ensuring the ordering of the data information of the generated online inspection information set, and ensures the stability of the data distribution of the generated online inspection information set.
进一步的,本发明实施例还包括:Further, the embodiments of the present invention also include:
步骤S241:通过所述电力巡检机器人搭载的三维激光扫描仪,进行数据采集,获取实时三维激光扫描点信息;Step S241 : performing data collection through a three-dimensional laser scanner mounted on the power inspection robot to obtain real-time three-dimensional laser scanning point information;
步骤S242:通过特征筛选指标,对所述实时三维激光扫描点信息进行筛选,获取三维激光扫描点筛选信息;Step S242: Screening the real-time 3D laser scanning point information by the feature screening index to obtain 3D laser scanning point screening information;
步骤S243:对所述三维激光扫描点筛选信息进行缺失度分析,获取缺失补正采集指令;Step S243: Perform missing degree analysis on the three-dimensional laser scanning point screening information, and obtain a missing correction and acquisition instruction;
步骤S244:通过所述缺失补正采集指令,进行补正,获取三维激光扫描点稳定信息;Step S244: performing correction through the missing correction and acquisition instruction to obtain the stability information of the three-dimensional laser scanning point;
步骤S245:将所述三维激光扫描点稳定信息上传至巡检信息暂存器中,获取在线巡检存储信息。Step S245: Upload the three-dimensional laser scanning point stabilization information to the inspection information temporary storage device to obtain online inspection storage information.
进一步的,通过所述缺失补正采集指令,进行补正,获取三维激光扫描点稳定信息,所述步骤S244包括:Further, through the missing correction acquisition instruction, correction is performed to obtain the three-dimensional laser scanning point stability information, and the step S244 includes:
步骤S244-1:通过所述缺失补正采集指令,调整三维激光扫描仪的采集装置角度信息,采集补正三维激光扫描点信息;Step S244-1: adjusting the angle information of the acquisition device of the three-dimensional laser scanner through the missing correction acquisition instruction, and acquiring and correcting the three-dimensional laser scanning point information;
步骤S244-2:对所述补正三维激光扫描点信息进行筛选,获取补正三维激光扫描点筛选信息;Step S244-2: Screening the corrected three-dimensional laser scanning point information, and obtaining the corrected three-dimensional laser scanning point screening information;
步骤S244-3:对所述补正三维激光扫描点筛选信息与所述三维激光扫描点筛选信息联合进行缺失度分析,获取补正缺失度信息;Step S244-3: Perform missing degree analysis on the corrected three-dimensional laser scanning point screening information and the three-dimensional laser scanning point screening information jointly to obtain corrected missing degree information;
步骤S244-4:判断所述补正缺失度信息是否满足预设缺失度限制,在满足所述预设缺失度限制后,完成补正,获取三维激光扫描点稳定信息。Step S244-4: Determine whether the corrected missing degree information satisfies the preset missing degree limit, and after the preset missing degree limit is satisfied, complete the correction, and obtain the three-dimensional laser scanning point stability information.
具体而言,所述三维激光扫描仪用于扫描输电线路表面的三维点云数据,针对绝缘子检测信息、线路接头检测信息,需要通过对应的传感器进行检测,检测步骤与输电线路信息(包括输电线路表面信息)一致,以输电线路表面信息进行表征性说明,此处不对指标检测进行一一赘述,绝缘子检测信息、线路接头检测信息等相关指标信息的采集分析过程与输电线路表面信息的采集分析过程存在一致性。Specifically, the 3D laser scanner is used to scan the 3D point cloud data on the surface of the transmission line. For insulator detection information and line joint detection information, it needs to be detected by the corresponding sensor. The detection steps and the transmission line information (including the transmission line The surface information is consistent with the surface information of the transmission line, and the surface information of the transmission line is used for a representative description. The index detection will not be repeated here. The collection and analysis process of the insulator detection information, line joint detection information and other related index information and the transmission line surface information collection and analysis process There is consistency.
具体而言,所述电子巡检机器人集成数据采集装置,通过数据采集装置搭载的三维激光扫描仪,进行数据采集,获取实时三维激光扫描点信息,所述特征筛选指标包括扫描点分辨率、扫描点带宽等相关参数指标,预设特征筛选限制为一预设参数指标,通过特征筛选指标与预设特征筛选限制,对所述实时三维激光扫描点信息进行筛选,获取三维激光扫描点筛选信息;将所述三维激光扫描点筛选信息输入SPSS(Statistical Product ServiceSolutions,统计产品与服务解决方案)软件进行缺失度分析,结合预设缺失度限制进行确实度判断,若缺失度分析所得缺失度小于预设缺失度限制,直接将所述三维激光扫描点筛选信息设定为三维激光扫描点稳定信息;若缺失度分析所得缺失度不小于预设缺失度限制,获取缺失补正采集指令,通过所述缺失补正采集指令,进行补正,在完成补正后,获取三维激光扫描点稳定信息;将所述三维激光扫描点稳定信息上传至巡检信息暂存器中,通过在线巡检信息集的标记信息,进行存储单元分配,将所述在线巡检信息集存储于数据暂存装置中,生成在线巡检存储信息。通过进行缺失度分析,为保证激光扫描点的完整性提供支持。Specifically, the electronic inspection robot integrates a data acquisition device, performs data acquisition through a 3D laser scanner mounted on the data acquisition device, and acquires real-time 3D laser scanning point information, and the feature screening index includes scanning point resolution, scanning Point bandwidth and other related parameter indicators, the preset feature screening limit is a preset parameter indicator, and the real-time 3D laser scanning point information is screened through the feature screening indicator and the preset feature screening limit to obtain 3D laser scanning point screening information; The three-dimensional laser scanning point screening information is input into SPSS (Statistical Product Service Solutions) software for missing degree analysis, and the reliability is judged in combination with the preset missing degree limit, if the missing degree obtained from the missing degree analysis is less than the preset degree If the missing degree limit is set, the three-dimensional laser scanning point screening information is directly set as the three-dimensional laser scanning point stability information; if the missing degree obtained by the missing degree analysis is not less than the preset missing degree limit, the missing correction collection instruction is obtained, and the missing correction is performed through the missing degree. Collect instructions, make corrections, and after corrections are completed, obtain 3D laser scanning point stability information; upload the 3D laser scanning point stability information to the inspection information temporary storage, and store it through the marking information of the online inspection information set unit allocation, and store the online inspection information set in the data temporary storage device to generate online inspection storage information. Provide support for ensuring the integrity of laser scanning points by performing missing degree analysis.
进一步具体说明,若缺失度分析所得缺失度不小于预设缺失度限制,获取缺失补正采集指令,通过所述缺失补正采集指令,调整三维激光扫描仪的采集装置角度信息,对所述实时三维激光扫描点信息限定区域进行数据采集,获取补正三维激光扫描点信息;通过SPSS软件对所述补正三维激光扫描点信息进行筛选,获取筛选输出,将所述筛选输出定义为补正三维激光扫描点筛选信息,基于所述补正三维激光扫描点筛选信息与所述三维激光扫描点筛选信息,通过四轴光学防抖原理,进行点位补偿还原,获取补正三维激光扫描点筛选联合信息,对补正三维激光扫描点筛选联合信息进行缺失度分析,获取补正缺失度信息,所述补正缺失度信息即补正后的缺失度分析所得缺失度;判断所述补正缺失度信息是否满足预设缺失度限制,在满足所述预设缺失度限制后,完成补正,获取三维激光扫描点稳定信息。通过四轴光学防抖原理,进行点位补偿还原,提高补正后三维激光扫描点的精度,结合预设缺失度限制,进行缺失度判定,为保证三维激光扫描点稳定信息的完整性提供技术支持。It is further specified that if the missing degree obtained by the missing degree analysis is not less than the preset missing degree limit, a missing correction acquisition instruction is obtained, and the angle information of the acquisition device of the three-dimensional laser scanner is adjusted through the missing correction acquisition instruction, and the real-time three-dimensional laser Data collection is performed in the limited area of the scanning point information, and the information of the corrected three-dimensional laser scanning point is obtained; the information of the corrected three-dimensional laser scanning point is screened by SPSS software, and the screening output is obtained, and the screening output is defined as the screening information of the corrected three-dimensional laser scanning point. , based on the screening information of the corrected three-dimensional laser scanning point and the screening information of the three-dimensional laser scanning point, through the principle of four-axis optical anti-shake, the point compensation and restoration are performed, and the joint information of the screening of the corrected three-dimensional laser scanning point is obtained, and the correction of the three-dimensional laser scanning point is obtained. Point screening and joint information to carry out missingness degree analysis to obtain corrected missingness degree information. After the preset missing degree limit is satisfied, the correction is completed, and the stability information of the 3D laser scanning point is obtained. Through the principle of four-axis optical image stabilization, point compensation and restoration are performed to improve the accuracy of 3D laser scanning points after correction. Combined with the preset missing degree limit, the degree of missingness is determined to provide technical support for ensuring the integrity of the stable information of 3D laser scanning points. .
步骤S300:通过所述电缆隧道的设计图,对关键输电设备进行标记,获取标记检测位置信息;Step S300: Marking the key power transmission equipment through the design drawing of the cable tunnel, and obtaining mark detection location information;
步骤S400:基于所述应急预警系统,进行历史数据提取,获取在线巡检历史信息集;Step S400: Based on the emergency early warning system, extract historical data to obtain an online inspection history information set;
步骤S500:通过所述在线巡检历史信息集与所述在线巡检信息集,进行比对分析,获取巡检比对信息;Step S500: performing comparative analysis through the online inspection history information set and the online inspection information set to obtain inspection comparison information;
步骤S600:通过所述标记检测位置信息与所述巡检比对信息,结合基本量调整所得历史外破预警维护记录,获取异常比对结果;Step S600: Obtain an abnormal comparison result by combining the information on the detection position of the mark and the comparison information for the inspection, in combination with the historical external breaking warning and maintenance records obtained by adjusting the basic amount;
具体而言,获取电缆隧道的设计图,所述获取方式不唯一,需要通过设计图的获取效率进行获取方式优选,获取方式不做限制,通过所述电缆隧道的设计图,对关键输电设备进行标记,所述关键输电设备可以是接地极、吊架、电缆支架等相关电缆隧道中的设备装置(包括消防设备、通风设备、排水设备),在标记完成后,获取标记检测位置信息;针对所述标记检测位置信息,在所述在线巡检信息集进行数据提取,获取所述标记检测位置信息的在线巡检信息,结合对应的历史数据信息,进行比对分析,获取异常比对结果,为及时发现并上报异常数据提供支持。Specifically, the design drawing of the cable tunnel is obtained. The obtaining method is not unique. The obtaining method needs to be optimized according to the obtaining efficiency of the design drawing. The obtaining method is not limited. Marking, the key power transmission equipment can be grounding poles, hangers, cable supports and other equipment in the relevant cable tunnels (including fire fighting equipment, ventilation equipment, drainage equipment), after the marking is completed, obtain the marking detection position information; The marker detection location information is obtained, data extraction is performed in the online inspection information set, the online inspection information of the marker detection location information is obtained, and the comparison analysis is performed in combination with the corresponding historical data information, and the abnormal comparison result is obtained, which is Provide support for timely detection and reporting of abnormal data.
进一步具体说明,基于所述应急预警系统,将在线巡检信息集存储于数据暂存装置中,确定所述数据暂存装置对应的固定存储器(ROM),在所述固定存储器,结合在线巡检信息集进行历史数据提取,获取在线巡检历史信息集;通过所述在线巡检历史信息集与所述在线巡检信息集,进行指标比对分析,确定所述在线巡检历史信息集中与所述在线巡检信息集参数大小存在一致性的参数指标,将所述存在一致性的参数指标设定为巡检比对参数指标,将所述巡检比对参数指标与所述在线巡检信息集参数设定为巡检比对信息,基于历史外破预警维护记录与所述标记检测位置信息,对所述巡检比对信息进行关联映射分析,获取异常比对结果,所述异常比对结果包括存在异常与不存在异常两种状态,为进行在线检测应急预警提供数据支持。Further specific description, based on the emergency early warning system, the online inspection information set is stored in the data temporary storage device, the fixed memory (ROM) corresponding to the data temporary storage device is determined, and in the fixed storage, combined with the online inspection Extract historical data from the information set to obtain the online inspection history information set; perform index comparison analysis through the online inspection history information set and the online inspection information set to determine whether the online inspection history information set is the same as that of the online inspection history information set. The parameter size of the online inspection information set is consistent with the parameter index, the consistent parameter index is set as the inspection comparison parameter index, and the inspection comparison parameter index and the online inspection information are set. The set parameter is set as the inspection and comparison information, and based on the historical external breaking warning maintenance record and the mark detection position information, the correlation mapping analysis is performed on the inspection and comparison information, and the abnormal comparison result is obtained. The results include two states of abnormality and non-existence of abnormality, which provide data support for online detection and emergency warning.
进一步具体说明,在进行预警维修过程中,需要对多个位置的异常逐个进行维护排除,对于异常维护排除的先后次序,可以通过所述异常比对结果中的所述标记检测位置信息,确定维护先后次序,具体的,若所述异常比对结果对应为存在异常,所述异常可以为某一检测位置存在异常,也可以是多个检测位置存在异常,若多个检测位置存在异常,在应急预警过程中,需要结合所述标记检测位置信息,进行等级标记,确定警报等级,若所述标记检测位置信息出现异常,对应的警报等级高,通过标记检测位置信息,进行分级预警,为提高维护方案时间的合理性提供数据支持。It is further specified that in the process of early warning maintenance, it is necessary to carry out maintenance and exclusion of abnormalities in multiple positions one by one. For the order of abnormal maintenance and exclusion, the position information can be detected through the marks in the abnormal comparison results to determine maintenance. Sequence, specifically, if the abnormal comparison result corresponds to an abnormality, the abnormality may be abnormality in a certain detection location, or abnormality in multiple detection locations. In the early warning process, it is necessary to carry out grade marking and determine the alarm level in combination with the mark detection position information. If the mark detection position information is abnormal, the corresponding alarm level is high. Provide data support for the rationality of the program time.
进一步的,如图3所示,本发明实施例还包括:Further, as shown in FIG. 3 , the embodiment of the present invention further includes:
步骤S610:通过基本量进行调整后,进行数据采集,获取微震监测数据集;Step S610: after the adjustment by the basic quantity, data collection is performed to obtain a microseismic monitoring data set;
步骤S620:通过所述微震监测数据集,确定微震监测画像;Step S620: Determine a microseismic monitoring profile through the microseismic monitoring data set;
步骤S630:通过所述微震监测画像与所述历史外破预警维护记录,确定外破微震外破预警画像;Step S630: Determine the microseismic external breaking early warning portrait of external breaking through the microseismic monitoring portrait and the historical external breaking early warning maintenance record;
步骤S640:通过所述标记检测位置信息与所述巡检比对信息,结合外破微震外破预警画像,获取异常比对结果。Step S640: Obtain an abnormal comparison result by combining the detection position information of the mark and the inspection comparison information, combined with the external rupture micro-shock and outer rupture early warning image.
进一步的,通过基本量进行调整后,进行数据采集,获取微震监测数据集,所述方法还包括:Further, after the adjustment by the basic quantity, data collection is performed to obtain a microseismic monitoring data set, and the method further includes:
步骤S611:在常态微震阶段,电力巡检机器人以第一姿态运行,进行微震监测,获取第一姿态微震基本量;Step S611: In the normal microseismic stage, the power inspection robot runs in the first posture, performs microseismic monitoring, and obtains the basic amount of microseisms in the first posture;
步骤S612:在常态微震阶段,电力巡检机器人以第二姿态运行,进行微震监测,获取第二姿态微震基本量;Step S612: In the normal microseismic stage, the power inspection robot runs in the second posture, performs microseismic monitoring, and obtains the basic amount of microseisms in the second posture;
步骤S613:在常态微震阶段,电力巡检机器人以第三姿态运行,进行微震监测,获取第三姿态微震基本量;Step S613: In the normal micro-seismic stage, the power inspection robot runs in the third posture, performs micro-seismic monitoring, and obtains the basic amount of micro-seismic in the third posture;
步骤S614:将所述第一姿态微震基本量、第二姿态微震基本量与第三姿态微震基本量设定为基本量,对微震监测数据进行调整,获取微震监测数据集。Step S614: Set the basic amount of microseismic at the first attitude, the basic amount of microseismic at the second attitude, and the basic amount of microseismic at the third attitude as basic values, adjust the microseismic monitoring data, and obtain a microseismic monitoring data set.
进一步的,通过所述微震监测画像与所述历史外破预警维护记录,所述步骤S630还包括:Further, through the microseismic monitoring portrait and the historical external breaking early warning maintenance record, the step S630 further includes:
步骤S631:在所述历史外破预警维护记录,进行外破类型划分,获取外破预警维护类型集;Step S631: in the historical external breach early warning maintenance record, classify external breach types, and obtain an external breach early warning maintenance type set;
步骤S632:对所述微震监测画像与所述外破预警维护类型集进行关联绑定,确定外破微震外破预警画像。Step S632: Associate and bind the microseismic monitoring portrait and the external breakage early warning maintenance type set to determine the external breakage microseismic and external breakage early warning portrait.
具体而言,在进行外破预警过程,需要确定外破方式,为提高在线检测应急预警信息的数据丰富度提供支持,针对外破方案,为针对进行维护方案确定提供支持。Specifically, in the process of external breaking early warning, it is necessary to determine the external breaking method to provide support for improving the data richness of online detection emergency warning information, and to provide support for the determination of the maintenance plan for the external breaking plan.
具体而言,在所述在线巡检信息集与所述在线巡检历史信息集中,将微震检测设备采集所得数据信息进行提取,获取微震监测数据集,在所述历史外破预警维护记录,进行外破类型划分,获取外破预警维护类型集,外破预警维护类型集包括工地挖掘、机械挖掘与非法入侵;通过所述微震监测数据集,确定微震监测画像,所述微震监测画像即工地挖掘微震监测画像、机械挖掘微震监测画像与非法入侵微震监测画像、常态微震监测画像(未受到外破对应的微震监测指标确定),通过所述微震监测画像与所述历史外破预警维护记录,对所述微震监测画像与所述外破预警维护类型集进行关联绑定(工地挖掘微震监测画像-工地挖掘、机械挖掘微震监测画像-机械挖掘与非法入侵微震监测画像-非法入侵),确定外破微震外破预警画像,通过所述标记检测位置信息与所述巡检比对信息,结合外破微震外破预警画像,获取异常比对结果。Specifically, in the online inspection information set and the online inspection history information set, extract the data information collected by the microseismic detection equipment, obtain the microseismic monitoring data set, break the early warning and maintenance records outside the history, and carry out The external damage type is divided, and the external damage early warning maintenance type set is obtained. The external damage early warning maintenance type set includes construction site excavation, mechanical excavation and illegal intrusion; through the microseismic monitoring data set, the microseismic monitoring image is determined, and the microseismic monitoring image is the construction site excavation. Microseismic monitoring images, mechanical excavation microseismic monitoring images, illegal intrusion microseismic monitoring images, and normal microseismic monitoring images (not determined by the microseismic monitoring indicators corresponding to external breakage), through the microseismic monitoring images and the historical external breakage early warning and maintenance records, The microseismic monitoring profile is associated and bound with the external breakage early warning maintenance type set (microseismic monitoring profile for construction site excavation - microseismic monitoring profile for construction site excavation, mechanical excavation microseismic monitoring profile - mechanical excavation and illegal intrusion microseismic monitoring profile - illegal intrusion), and the external breakdown is determined. The micro-earthquake external break early warning portrait, through the mark detection location information and the inspection comparison information, combined with the external break micro shock and external break early warning portrait, to obtain abnormal comparison results.
特别的,在电力巡检机器人进行数据采集过程,电力巡检机器人以不同的姿态运行,对应的微震分量不同,通过进行姿态辨识区分,确定电力巡检机器人的姿态阶段,在常态微震阶段即未受到外破对应的阶段,在电力巡检机器人不同姿态分别进行微震检测,确定不同姿态的初始微震分量(第一姿态微震基本量、第二姿态微震基本量与第三姿态微震基本量),将所述初始微震分量设定为所述微震检测设备的基本量(在进行测试过程,需要对应电力巡检机器人的姿态,将测试所得微震参数减去基本量,后进行输出),对微震监测数据进行调整,获取微震监测数据集,降低电力巡检机器人因行进方案执行过程,出现的微震分量,导致微震检测设备采集所得参数指标不稳定,为保证微震监测数据的稳定性提供支持。In particular, during the data collection process of the power inspection robot, the power inspection robot runs in different attitudes, and the corresponding microseismic components are different. By performing attitude identification and distinction, the attitude stage of the power inspection robot is determined. In the normal microseismic stage, it is not In the stage corresponding to the external breakage, the microseismic detection is carried out in different postures of the power inspection robot to determine the initial microseismic components of the different postures (the basic amount of microseismic in the first posture, the basic amount of microseismic in the second posture and the basic amount of microseismic in the third posture). The initial microseismic component is set as the basic quantity of the microseismic detection equipment (during the testing process, it is necessary to correspond to the posture of the power inspection robot, and the microseismic parameters obtained from the test are subtracted from the basic quantity, and then output), and the microseismic monitoring data Make adjustments to obtain the microseismic monitoring data set, reduce the microseismic component of the electric inspection robot due to the execution of the traveling plan, and cause the parameter indicators collected by the microseismic detection equipment to be unstable, and provide support for ensuring the stability of the microseismic monitoring data.
进一步具体说明,通过所述云处理器,上传所述微震监测数据集与所述历史外破预警维护记录,基于工地挖掘、机械挖掘与非法入侵,进行数据类型标记划分,具体的,通过所述历史外破预警维护记录,确定外破预警维护类型集,确定工地挖掘状态对应的微震监测数据子集、机械挖掘状态对应的微震监测数据子集与非法入侵状态对应的微震监测数据子集,通过不同的数据标签(波速、波速梯度、应力、集中度、波速相对变化率等参数指标),对微震监测数据集的数据划分,获取工地挖掘状态对应的微震监测数据子集、机械挖掘状态对应的微震监测数据子集、非法入侵状态对应的微震监测数据子集与常态(未受到外破对应的微震监测指标确定)对应的微震监测数据子集,通过所述数据标签,进行数据标记,确定微震监测画像。It is further specified that, through the cloud processor, the microseismic monitoring data set and the historical external breaking early warning maintenance record are uploaded, and data type marking is divided based on site excavation, mechanical excavation and illegal intrusion. Historical external breaking early warning and maintenance records, determine the external breaking early warning maintenance type set, determine the microseismic monitoring data subset corresponding to the excavation state of the construction site, the microseismic monitoring data subset corresponding to the mechanical excavation state, and the microseismic monitoring data subset corresponding to the illegal intrusion state. Different data labels (parameter indicators such as wave velocity, wave velocity gradient, stress, concentration, relative change rate of wave velocity, etc.), divide the data of the microseismic monitoring data set, and obtain the microseismic monitoring data subset corresponding to the excavation state of the construction site, and the corresponding data of the mechanical excavation state. The microseismic monitoring data subset, the microseismic monitoring data subset corresponding to the illegal intrusion state, and the microseismic monitoring data subset corresponding to the normal state (determined by the microseismic monitoring index corresponding to no external break), through the data label, carry out data marking, and determine the microseismic Monitoring image.
步骤S700:基于所述云处理器,将所述电缆隧道的设计图还原导入,获取电缆隧道输电仿真图;Step S700: based on the cloud processor, restore and import the design drawing of the cable tunnel, and obtain a cable tunnel power transmission simulation diagram;
步骤S800:基于电缆隧道输电仿真图,通过所述巡检布控分布信息与所述在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图;Step S800: Based on the cable tunnel power transmission simulation diagram, through the inspection and deployment control distribution information and the online inspection information set, perform parameter restoration to obtain the cable tunnel power transmission simulation simulation diagram;
步骤S900:通过所述电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果;Step S900: performing a simulation run through the cable tunnel power transmission simulation diagram to obtain an abnormal simulation result;
步骤S1000:将所述异常模拟结果下发至所述应急预警系统,通过所述异常比对结果与所述异常模拟结果,获取电缆隧道的在线检测应急预警信息。Step S1000: Send the abnormal simulation result to the emergency early warning system, and obtain the online detection emergency early warning information of the cable tunnel through the abnormal comparison result and the abnormal simulation result.
具体而言,所述云处理器内部搭建电力系统分析虚拟仿真平台,通过应急预警系统与云处理器通信连接,将所述电缆隧道的设计图还原导入,进行仿真还原,获取电缆隧道输电仿真图,将所述历史外破预警维护记录与在线巡检历史信息集上传至所述电缆隧道输电仿真图,进行参数还原设置,在完成参数还原设置后,将所述巡检布控分布信息与所述在线巡检信息集导入,进行参数设置,获取电缆隧道输电仿真模拟图,设定预设相对错误容限,所述预设相对错误容限为一预设参数指标,在完成相对错误容限设定后,进行模拟仿真运行,获取仿真输出,将所述仿真输出中存在警示标记的参数指标提取,获取异常模拟结果;将所述异常模拟结果下发至所述应急预警系统,将所述异常比对结果与所述异常模拟结果进行联合输出,将所述联合输出结果设定为在线检测应急预警信息,对所述电缆隧道进行异常警示。通过所述云处理器,进行辅助运算,在保证异常警示信息的精度的同时,提高应急预警系统的响应效率,对所述电缆隧道及时进行异常警示,缩短电缆隧道投入使用的周期,为保障电力系统运行的稳定性提供支持。Specifically, the cloud processor builds a virtual simulation platform for power system analysis, communicates with the cloud processor through the emergency warning system, restores and imports the design drawing of the cable tunnel, performs simulation restoration, and obtains the cable tunnel transmission simulation diagram , upload the historical external breaking early warning maintenance record and online inspection history information set to the cable tunnel power transmission simulation diagram, and perform parameter restoration settings. Import the online inspection information set, set parameters, obtain the simulation diagram of cable tunnel power transmission, and set a preset relative error tolerance. The preset relative error tolerance is a preset parameter index. After completing the relative error tolerance setting After determination, carry out the simulation simulation operation, obtain the simulation output, extract the parameter indicators with warning signs in the simulation output, and obtain the abnormal simulation result; send the abnormal simulation result to the emergency early warning system, and the abnormal The comparison result and the abnormal simulation result are jointly output, and the combined output result is set as the online detection emergency warning information, and the abnormal warning is performed on the cable tunnel. Through the cloud processor, auxiliary calculation is performed, the response efficiency of the emergency early warning system is improved while the accuracy of the abnormal warning information is ensured, and the abnormal warning is performed on the cable tunnel in time, so as to shorten the cycle of the cable tunnel being put into use, in order to ensure the power Provide support for the stability of system operation.
综上所述,本发明所提供的一种AI智能电缆隧道的在线检测应急预警方法及系统具有如下技术效果:To sum up, the online detection emergency early warning method and system for an AI smart cable tunnel provided by the present invention has the following technical effects:
由于采用了在电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;基于电力巡检机器人,进行数据采集,获取在线巡检信息集;通过设计图,对关键输电设备标记,获取标记检测位置信息,基于应急预警系统,进行历史数据提取,获取在线巡检历史信息集,结合在线巡检信息集,进行比对分析,获取巡检比对信息,结合标记检测位置信息与基本量调整所得历史外破预警维护记录,获取异常比对结果;将设计图还原导入云处理器,获取电缆隧道输电仿真图,通过巡检布控分布信息与在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果,结合异常比对结果,获取在线检测应急预警信,本发明通过提供了一种AI智能电缆隧道的在线检测应急预警方法及系统,通过电力巡检机器人,高效进行电缆维检,达到了提高电缆监测力度,及时进行异常警示,提前排除电缆破坏事故,保障电力系统运行的稳定性的技术效果。Due to the deployment and control of the power inspection robot in the cable tunnel, the distribution information of inspection and control is obtained; based on the power inspection robot, data collection is carried out to obtain the online inspection information set; through the design drawing, the key transmission equipment is marked, Obtain the location information of marker detection, extract historical data based on the emergency warning system, obtain the historical information set of online inspection, conduct comparative analysis in combination with the online inspection information set, obtain inspection comparison information, and combine the location information of marker detection with basic information. The historical external break warning and maintenance records obtained from the quantitative adjustment, and the abnormal comparison results are obtained; the design diagram is restored and imported into the cloud processor, and the simulation diagram of the cable tunnel transmission is obtained. Cable tunnel power transmission simulation simulation diagram, carry out simulation simulation operation, obtain abnormal simulation results, and obtain online detection emergency early warning letter in combination with abnormal comparison results. The present invention provides an AI intelligent cable tunnel online detection emergency early warning method and system, Through the power inspection robot, the efficient cable maintenance inspection has achieved the technical effect of improving the cable monitoring strength, issuing abnormal warnings in time, eliminating cable damage accidents in advance, and ensuring the stability of the power system operation.
由于采用了获取微震监测数据集,确定微震监测画像,结合历史外破预警维护记录,确定外破微震外破预警画像;通过标记检测位置信息与巡检比对信息,结合外破微震外破预警画像,获取异常比对结果,为提高在线检测应急预警信息的数据丰富度提供支持,针对外破方案,为针对进行维护方案确定提供支持。Due to the acquisition of the microseismic monitoring data set, the microseismic monitoring image is determined, combined with the historical external breaking early warning and maintenance records, the external breaking microseismic external breaking early warning image is determined; by marking the detection location information and the inspection comparison information, combined with the external breaking microseismic external breaking early warning Profile, obtain abnormal comparison results, provide support for improving the data richness of online detection emergency warning information, and provide support for the determination of maintenance plans for external breakage plans.
由于采用了在常态微震阶段,电力巡检机器人以第一姿态运行,进行微震监测,获取第一姿态微震基本量;以第二姿态运行,进行微震监测,获取第二姿态微震基本量;以第三姿态运行,进行微震监测,获取第三姿态微震基本量,设定基本量,调整微震监测数据,获取微震监测数据集,降低电力巡检机器人因行进方案执行过程,出现的微震分量,导致微震检测设备采集所得参数指标不稳定,为保证微震监测数据的稳定性提供支持。Due to the use of the normal microseismic stage, the power inspection robot runs in the first attitude, performs microseismic monitoring, and obtains the basic amount of the first attitude; Three attitudes operation, microseismic monitoring, obtaining the basic amount of microseismic in the third attitude, setting the basic amount, adjusting the microseismic monitoring data, obtaining the microseismic monitoring data set, reducing the microseismic component of the power inspection robot due to the execution of the traveling plan, resulting in microseismic The parameter indicators collected by the detection equipment are unstable, which provides support to ensure the stability of the microseismic monitoring data.
实施例二Embodiment 2
基于与前述实施例中一种AI智能电缆隧道的在线检测应急预警方法相同的发明构思,如图4所示,本发明提供了一种AI智能电缆隧道的在线检测应急预警系统,其中,所述系统包括:Based on the same inventive concept as the online detection emergency early warning method for AI smart cable tunnels in the foregoing embodiment, as shown in FIG. 4 , the present invention provides an online detection emergency early warning system for AI smart cable tunnels, wherein the said The system includes:
布控分布获取单元11,所述布控分布获取单元11用于在所述电缆隧道中,对电力巡检机器人进行布控,获取巡检布控分布信息;an arrangement and control
数据采集单元12,所述数据采集单元12用于基于所述电力巡检机器人,进行数据采集,获取在线巡检信息集;a
设备标记单元13,所述设备标记单元13用于通过所述电缆隧道的设计图,对关键输电设备进行标记,获取标记检测位置信息;an
数据提取单元14,所述数据提取单元14用于基于应急预警系统,进行历史数据提取,获取在线巡检历史信息集;
比对分析单元15,所述比对分析单元15用于通过所述在线巡检历史信息集与所述在线巡检信息集,进行比对分析,获取巡检比对信息;A comparison and
比对结果获取单元16,所述比对结果获取单元16用于通过所述标记检测位置信息与所述巡检比对信息,结合基本量调整所得历史外破预警维护记录,获取异常比对结果;The comparison
电缆仿真导入单元17,所述电缆仿真导入单元17用于基于云处理器,将所述电缆隧道的设计图还原导入,获取电缆隧道输电仿真图;a cable
参数仿真单元18,所述参数仿真单元18用于基于电缆隧道输电仿真图,通过所述巡检布控分布信息与所述在线巡检信息集,进行参数还原,获取电缆隧道输电仿真模拟图;A
仿真运行单元19,所述仿真运行单元19用于通过所述电缆隧道输电仿真模拟图,进行模拟仿真运行,获取异常模拟结果;A
应急预警单元20,所述应急预警单元20用于将所述异常模拟结果下发至应急预警系统,通过所述异常比对结果与所述异常模拟结果,获取电缆隧道的在线检测应急预警信息。The emergency
进一步的,所述系统包括:Further, the system includes:
第一数据采集单元,所述第一数据采集单元用于通过行走机构,所述电力巡检机器人以第一姿态,进行数据采集,获取第一姿态在线巡检信息;a first data collection unit, the first data collection unit is used to collect data through the walking mechanism, and the electric power inspection robot takes a first attitude to obtain online inspection information of the first attitude;
第二数据采集单元,所述第二数据采集单元用于通过攀爬机构,所述电力巡检机器人以第二姿态,进行数据采集,获取第二姿态在线巡检信息;a second data collection unit, the second data collection unit is used to collect data through the climbing mechanism, and the electric power inspection robot takes a second attitude to acquire online inspection information of the second attitude;
第三数据采集单元,所述第三数据采集单元用于通过越障机构,所述电力巡检机器人以第三姿态,进行数据采集,获取第三姿态在线巡检信息;a third data collection unit, the third data collection unit is configured to pass through the obstacle crossing mechanism, and the electric power inspection robot performs data collection in a third attitude, and obtains online inspection information of the third attitude;
在线巡检信息获取单元,所述在线巡检信息获取单元用于基于所述第一姿态在线巡检信息、第二姿态在线巡检信息与第三姿态在线巡检信息,生成在线巡检信息集。An online inspection information acquisition unit, the online inspection information acquisition unit is configured to generate an online inspection information set based on the online inspection information of the first attitude, the online inspection information of the second attitude and the online inspection information of the third attitude .
进一步的,所述系统包括:Further, the system includes:
扫描点获取单元,所述扫描点获取单元用于通过所述电力巡检机器人搭载的三维激光扫描仪,进行数据采集,获取实时三维激光扫描点信息;a scanning point acquiring unit, which is used to collect data through a 3D laser scanner carried by the electric power inspection robot to acquire real-time 3D laser scanning point information;
扫描点筛选单元,所述扫描点筛选单元用于通过特征筛选指标,对所述实时三维激光扫描点信息进行筛选,获取三维激光扫描点筛选信息;a scanning point screening unit, which is used for screening the real-time 3D laser scanning point information by feature screening indicators to obtain 3D laser scanning point screening information;
缺失度分析单元,所述缺失度分析单元用于对所述三维激光扫描点筛选信息进行缺失度分析,获取缺失补正采集指令;A missing degree analysis unit, the missing degree analysis unit is configured to perform missing degree analysis on the three-dimensional laser scanning point screening information, and obtain a missing correction and acquisition instruction;
缺失补正单元,所述缺失补正单元用于通过所述缺失补正采集指令,进行补正,获取三维激光扫描点稳定信息;A missing correction unit, the missing correction unit is configured to perform correction through the missing correction acquisition instruction, and obtain the stability information of the three-dimensional laser scanning point;
信息暂存单元,所述信息暂存单元用于将所述三维激光扫描点稳定信息上传至巡检信息暂存器中,获取在线巡检存储信息。An information temporary storage unit, which is used for uploading the three-dimensional laser scanning point stability information to the inspection information temporary storage device to obtain online inspection storage information.
进一步的,所述系统包括:Further, the system includes:
信息补正单元,所述信息补正单元用于通过所述缺失补正采集指令,调整三维激光扫描仪的采集装置角度信息,采集补正三维激光扫描点信息;an information correction unit, which is used to adjust the angle information of the acquisition device of the three-dimensional laser scanner through the missing correction and acquisition instruction, and collect and correct the three-dimensional laser scanning point information;
扫描点筛选单元,所述扫描点筛选单元用于对所述补正三维激光扫描点信息进行筛选,获取补正三维激光扫描点筛选信息;a scanning point screening unit, the scanning point screening unit is used to screen the information of the corrected three-dimensional laser scanning point, and obtain the screening information of the corrected three-dimensional laser scanning point;
联合缺失度分析单元,所述联合缺失度分析单元用于对所述补正三维激光扫描点筛选信息与所述三维激光扫描点筛选信息联合进行缺失度分析,获取补正缺失度信息;a joint missing degree analysis unit, which is configured to jointly perform missing degree analysis on the corrected 3D laser scanning point screening information and the 3D laser scanning point screening information to obtain corrected missing degree information;
缺失度判断单元,所述缺失度判断单元用于判断所述补正缺失度信息是否满足预设缺失度限制,在满足所述预设缺失度限制后,完成补正,获取三维激光扫描点稳定信息。A missing degree judgment unit, the missing degree judgment unit is configured to determine whether the corrected missing degree information satisfies a preset missing degree limit, and after the preset missing degree limit is satisfied, complete the correction, and obtain 3D laser scanning point stability information.
进一步的,所述系统包括:Further, the system includes:
微震监测数据获取单元,所述微震监测数据获取单元用于通过基本量进行调整后,进行数据采集,获取微震监测数据集;a microseismic monitoring data acquisition unit, the microseismic monitoring data acquisition unit is configured to perform data acquisition after adjustment by basic quantities to acquire a microseismic monitoring data set;
监测画像确定单元,所述监测画像确定单元用于通过所述微震监测数据集,确定微震监测画像;a monitoring portrait determination unit, the monitoring portrait determination unit is configured to determine the microseismic monitoring portrait through the microseismic monitoring data set;
外破预警画像确定单元,所述外破预警画像确定单元用于通过所述微震监测画像与所述历史外破预警维护记录,确定外破微震外破预警画像;an external breakage early warning portrait determination unit, the external breakage early warning portrait determining unit is used to determine the external breakage microseismic external breakage early warning portrait through the microseismic monitoring portrait and the historical external breakage early warning maintenance record;
异常比对结果获取单元,所述异常比对结果获取单元用于通过所述标记检测位置信息与所述巡检比对信息,结合外破微震外破预警画像,获取异常比对结果。An abnormal comparison result obtaining unit, which is configured to obtain the abnormal comparison result through the mark detection position information and the inspection comparison information, combined with the external breaking micro-shock and external breaking early warning image.
进一步的,所述系统包括:Further, the system includes:
第一姿态微震监测单元,所述第一姿态微震监测单元用于在常态微震阶段,电力巡检机器人以第一姿态运行,进行微震监测,获取第一姿态微震基本量;A first attitude microseismic monitoring unit, the first attitude microseismic monitoring unit is used for, in the normal microseismic stage, the electric power inspection robot runs in the first attitude, performs microseismic monitoring, and obtains the basic quantity of the first attitude microseism;
第二姿态微震监测单元,所述第二姿态微震监测单元用于在常态微震阶段,电力巡检机器人以第二姿态运行,进行微震监测,获取第二姿态微震基本量;The second attitude microseismic monitoring unit, the second attitude microseismic monitoring unit is used for, in the normal microseismic stage, the power inspection robot runs in the second attitude, performs microseismic monitoring, and obtains the basic quantity of the second attitude microseism;
第三姿态微震监测单元,所述第三姿态微震监测单元用于在常态微震阶段,电力巡检机器人以第三姿态运行,进行微震监测,获取第三姿态微震基本量;The third attitude microseismic monitoring unit, the third attitude microseismic monitoring unit is used for, in the normal microseismic stage, the power inspection robot runs in the third attitude, performs microseismic monitoring, and obtains the basic quantity of the third attitude microseismic;
微震监测调整单元,所述微震监测调整单元用于将所述第一姿态微震基本量、第二姿态微震基本量与第三姿态微震基本量设定为基本量,对微震监测数据进行调整,获取微震监测数据集。A microseismic monitoring and adjustment unit, which is used to set the basic amount of microseismic in the first attitude, the basic amount of microseismic in the second attitude, and the basic amount of microseismic in the third attitude as basic amounts, adjust the microseismic monitoring data, and obtain Microseismic Monitoring Dataset.
进一步的,所述系统包括:Further, the system includes:
外破类型划分单元,所述外破类型划分单元用于在所述历史外破预警维护记录,进行外破类型划分,获取外破预警维护类型集;an external damage type division unit, the external damage type division unit is used to classify the external damage type in the historical external damage early warning maintenance record, and obtain a set of external damage early warning maintenance types;
关联绑定单元,所述关联绑定单元用于对所述微震监测画像与所述外破预警维护类型集进行关联绑定,确定外破微震外破预警画像。An association binding unit, which is configured to associate and bind the microseismic monitoring portrait and the external rupture early warning maintenance type set to determine the external rupture microseismic and external rupture early warning portrait.
本说明书和附图仅仅是本发明的示例性说明,在不脱离本发明的精神和范围的情况下,可对其进行各种修改和组合。本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明意图包括这些改动和变型在内。The present specification and drawings are merely illustrative of the present invention, and various modifications and combinations may be made without departing from the spirit and scope of the present invention. These modifications and variations of the present invention fall within the scope of the claims of the present invention and technical equivalents thereof, and the present invention is intended to include these modifications and variations.
Claims (8)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211139420.9ACN115238366B (en) | 2022-09-19 | 2022-09-19 | Online detection emergency early warning method and system for AI intelligent cable tunnel |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211139420.9ACN115238366B (en) | 2022-09-19 | 2022-09-19 | Online detection emergency early warning method and system for AI intelligent cable tunnel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115238366Atrue CN115238366A (en) | 2022-10-25 |
| CN115238366B CN115238366B (en) | 2022-12-09 |
Family
ID=83681317
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211139420.9AActiveCN115238366B (en) | 2022-09-19 | 2022-09-19 | Online detection emergency early warning method and system for AI intelligent cable tunnel |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115238366B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116754022A (en)* | 2023-08-22 | 2023-09-15 | 山东浪潮新基建科技有限公司 | On-line detection emergency early warning method and system for cable tunnel |
| CN117688787A (en)* | 2024-02-04 | 2024-03-12 | 广东电网有限责任公司广州供电局 | Disaster simulation processing method and device for cable tunnel and electronic equipment |
| CN118212708A (en)* | 2024-04-03 | 2024-06-18 | 重庆交通大学 | Intelligent inspection method and system for underground cables based on multimodal data fusion |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140157405A1 (en)* | 2012-12-04 | 2014-06-05 | Bill Joll | Cyber Behavior Analysis and Detection Method, System and Architecture |
| CN109217163A (en)* | 2018-09-11 | 2019-01-15 | 贵州电网有限责任公司 | Urban electric power cable comprehensive monitoring and intelligent operational system based on geographical location |
| CN109446621A (en)* | 2018-10-18 | 2019-03-08 | 国网山西省电力公司太原供电公司 | A kind of underground electric pipe network data building system and construction method |
| CN111273130A (en)* | 2020-03-02 | 2020-06-12 | 国网江西省电力有限公司九江供电分公司 | Multi-parameter acquisition and abnormal prevention and early warning method and application of substation cable channel |
| CN112330930A (en)* | 2020-09-09 | 2021-02-05 | 北京潞电电气设备有限公司 | Urban tunnel traffic monitoring method, system and platform |
| CN114580673A (en)* | 2022-03-03 | 2022-06-03 | 国网辽宁省电力有限公司电力科学研究院 | State detection method and device for cable tunnel inspection robot |
| CN114658482A (en)* | 2022-03-28 | 2022-06-24 | 中国科学院武汉岩土力学研究所 | A kind of TBM construction rockburst microseismic automatic monitoring intelligent early warning system and method |
- 2022
- 2022-09-19CNCN202211139420.9Apatent/CN115238366B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140157405A1 (en)* | 2012-12-04 | 2014-06-05 | Bill Joll | Cyber Behavior Analysis and Detection Method, System and Architecture |
| CN109217163A (en)* | 2018-09-11 | 2019-01-15 | 贵州电网有限责任公司 | Urban electric power cable comprehensive monitoring and intelligent operational system based on geographical location |
| CN109446621A (en)* | 2018-10-18 | 2019-03-08 | 国网山西省电力公司太原供电公司 | A kind of underground electric pipe network data building system and construction method |
| CN111273130A (en)* | 2020-03-02 | 2020-06-12 | 国网江西省电力有限公司九江供电分公司 | Multi-parameter acquisition and abnormal prevention and early warning method and application of substation cable channel |
| CN112330930A (en)* | 2020-09-09 | 2021-02-05 | 北京潞电电气设备有限公司 | Urban tunnel traffic monitoring method, system and platform |
| CN114580673A (en)* | 2022-03-03 | 2022-06-03 | 国网辽宁省电力有限公司电力科学研究院 | State detection method and device for cable tunnel inspection robot |
| CN114658482A (en)* | 2022-03-28 | 2022-06-24 | 中国科学院武汉岩土力学研究所 | A kind of TBM construction rockburst microseismic automatic monitoring intelligent early warning system and method |
Non-Patent Citations (4)
| Title |
|---|
| WEI SONG等: "Design of a Micro Cable Tunnel Inspection Robot", 《IOP CONFERENCE SERIES: MATERIALS SCIENCE AND ENGINEERING》* |
| 刘永锋等: "三维激光扫描技术在历史建筑物测绘中的应用", 《城市勘测》* |
| 吴秀球: "高压电缆本体在线监测系统的配置探讨", 《佛山科学技术学院学报(自然科学版)》* |
| 田浩等: "基于负荷参与的源荷互动调峰多目标优化方法", 《电网与清洁能源》* |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116754022A (en)* | 2023-08-22 | 2023-09-15 | 山东浪潮新基建科技有限公司 | On-line detection emergency early warning method and system for cable tunnel |
| CN116754022B (en)* | 2023-08-22 | 2023-10-27 | 山东浪潮新基建科技有限公司 | On-line detection emergency early warning method and system for cable tunnel |
| CN117688787A (en)* | 2024-02-04 | 2024-03-12 | 广东电网有限责任公司广州供电局 | Disaster simulation processing method and device for cable tunnel and electronic equipment |
| CN117688787B (en)* | 2024-02-04 | 2024-05-17 | 广东电网有限责任公司广州供电局 | Disaster simulation processing method and device for cable tunnel and electronic equipment |
| CN118212708A (en)* | 2024-04-03 | 2024-06-18 | 重庆交通大学 | Intelligent inspection method and system for underground cables based on multimodal data fusion |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115238366B (en) | 2022-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115238366B (en) | Online detection emergency early warning method and system for AI intelligent cable tunnel | |
| CN111864898B (en) | Three-dimensional information system based on power transmission online monitoring data and control method thereof | |
| CN112539704B (en) | A method for measuring the distance between hidden dangers and conductors in transmission line channels | |
| CN114689994A (en) | System and method for online positioning and monitoring fault of transmission line | |
| CN115271269B (en) | BIM-based large prefabricated part hoisting safety control method | |
| CN113503912A (en) | Urban rail transit civil engineering facility health status real-time monitoring system | |
| CN113607449A (en) | Bridge cluster structure universe intelligent monitoring and safety early warning system | |
| CN113989670B (en) | Method for quickly extracting height of forest obstacle of power grid power transmission line | |
| CN110910440A (en) | A method and system for determining the length of transmission lines based on power image data | |
| CN113701722B (en) | Three-dimensional oblique photogrammetry system for surveying | |
| CN115664006A (en) | Increment distribution network intelligence management and control integration platform | |
| CN119832691A (en) | Land-air collaborative monitoring and early warning method and system for buried gas pipeline in landslide hidden danger area | |
| CN111596157B (en) | Method, device, system, and storage medium for predicting power system fault conditions | |
| CN115077489B (en) | Unmanned aerial vehicle oblique photography earthwork volume calculation method | |
| CN119834880A (en) | Highway optical cable fault positioning method, system and equipment | |
| CN114413854B (en) | Real-scene three-dimensional image checking system based on oblique photography | |
| CN119624367A (en) | Virtual reality system for power infrastructure construction management | |
| CN117074869B (en) | Distribution line fault positioning method and system | |
| CN116567566A (en) | Steep slope anti-slip hazard monitoring method and system based on multi-source information fusion | |
| CN116823192A (en) | Iron tower intelligent detection system | |
| CN116989842A (en) | Equipment fault diagnosis method and device based on big data and storage medium | |
| CN116846468A (en) | A remote monitoring and management method, device and system for transmission network | |
| CN112348419B (en) | Internet of things processing system and method | |
| CN115908049A (en) | Fan blade hovering position dynamic identification system based on intelligent identification | |
| JP7246046B2 (en) | Ground deformation evaluation method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |