CN115163055A - Surrounding rock stability judging, early warning and supporting method - Google Patents
Surrounding rock stability judging, early warning and supporting methodDownload PDFInfo
- Publication number
- CN115163055A CN115163055ACN202210868895.5ACN202210868895ACN115163055ACN 115163055 ACN115163055 ACN 115163055ACN 202210868895 ACN202210868895 ACN 202210868895ACN 115163055 ACN115163055 ACN 115163055A
- Authority
- CN
- China
- Prior art keywords
- drilling
- distance
- anchor
- excavation
- drill
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/12—Means for transmitting measuring-signals or control signals from the well to the surface, or from the surface to the well, e.g. for logging while drilling
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D20/00—Setting anchoring-bolts
- E21D20/003—Machines for drilling anchor holes and setting anchor bolts
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21F—SAFETY DEVICES, TRANSPORT, FILLING-UP, RESCUE, VENTILATION, OR DRAINING IN OR OF MINES OR TUNNELS
- E21F17/00—Methods or devices for use in mines or tunnels, not covered elsewhere
- E21F17/18—Special adaptations of signalling or alarm devices
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Geophysics (AREA)
- Fluid Mechanics (AREA)
- Environmental & Geological Engineering (AREA)
- Remote Sensing (AREA)
- Structural Engineering (AREA)
- Earth Drilling (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及巷道相关技术领域,具体地,涉及一种围岩稳定性判定、预警和支护方法。The invention relates to the technical field of roadways, in particular to a method for determining, warning and supporting surrounding rock stability.
背景技术Background technique
随着巷道的开挖,巷道围岩会在地应力作用下发生变形、破坏,造成顶板离层。掘进顶板离层是引起煤矿巷道冒顶事故的主要原因。对顶板离层的及时监测并采取措施是保障巷道安全掘进的重要手段,也是煤矿智能化建设的要求。相关技术中,通常利用施工人员的作业经验确定顶板离层的存在及其覆盖区域,由此,存在判定结果准确性低,无法有效地保证围岩的稳定性的问题。With the excavation of the roadway, the surrounding rock of the roadway will be deformed and damaged under the action of in-situ stress, resulting in the separation of the roof. The main reason for the roof fall accident in the coal mine roadway is the separation of the roof during the excavation. The timely monitoring of roof separation and taking measures is an important means to ensure the safe excavation of the roadway, and it is also a requirement for the intelligent construction of coal mines. In the related art, the presence of the roof separation layer and its coverage area are usually determined based on the operating experience of the construction personnel. Therefore, the accuracy of the determination result is low, and the stability of the surrounding rock cannot be effectively guaranteed.
发明内容SUMMARY OF THE INVENTION
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。The present invention aims to solve one of the technical problems in the related art at least to a certain extent.
为此,本发明的实施例提出一种围岩稳定性判定、预警和支护方法,该围岩稳定性判定、预警和支护方法具有判定结果准确性高,能够有效保证围岩的稳定性的优点。To this end, the embodiments of the present invention propose a method for determining, early warning and supporting surrounding rock stability. The method for determining, early warning and supporting surrounding rock stability has high accuracy of determination results and can effectively ensure the stability of surrounding rock. The advantages.
根据本发明实施例的围岩稳定性判定、预警和支护方法,打设锚杆的过程包括以下步骤:掘进机开挖巷道并每完成一次开挖进尺后;钻机在顶板上打设第一钻孔,检测装置实时检测钻机在打孔过程中的随钻参数,并进行智能分析;当检测装置分析随钻参数未达到离层临界值时,按照设定的锚杆支护距开挖面的距离安装锚杆;当检测装置分析随钻参数达到离层临界值时,判定打孔区域所在的顶板为不稳定顶板,发出预警提示,在第一钻孔内安装锚杆;所述不稳定顶板在此后不少于二次的开挖与支护过程中,减少空顶距离,并打设第二钻孔进行测量,如发现随钻参数仍超过离层临界值,补打锚索;直至第二钻孔随钻参数持续小于离层临界值时,不打锚索,直至第一钻孔随钻参数持续小于离层临界值时,延长空顶距离。According to the method for determining the stability of surrounding rock, early warning and supporting, the process of setting up the bolt includes the following steps: after the roadheader excavates the roadway and completes each excavation footage; When drilling, the detection device detects real-time drilling parameters of the drilling rig during the drilling process, and performs intelligent analysis; when the detection device analyzes the parameters while drilling does not reach the critical value of the separation layer, the excavation surface is excavated according to the set bolt support distance The anchor rod is installed at the distance of the drilling rig; when the parameters analyzed by the detection device while drilling reaches the critical value of the layer separation, it is determined that the roof where the drilling area is located is an unstable roof, an early warning prompt is issued, and the anchor rod is installed in the first drilling hole; the unstable roof During the excavation and support process of the roof not less than two times thereafter, reduce the distance of the empty roof, and set up a second borehole for measurement. When the drilling-while-drilling parameter of the second drilling hole is continuously smaller than the critical value of the separation layer, the anchor cable is not cut, until the drilling-while-drilling parameter of the first drilling hole is continuously smaller than the critical value of the separation layer, the empty roof distance is extended.
根据本发明实施例的围岩稳定性判定、预警和支护方法,打设第一钻孔和第二钻孔时,检测装置通过检测随钻参数,判定顶板的稳定性,即判定顶板是否出现离层和离层程度,由此,将施工人员的主观判定转变为仪器的客观判定,提高了判定结果的准确性。According to the method for determining the stability of surrounding rock, early warning and supporting, when the first drilling hole and the second drilling hole are drilled, the detection device determines the stability of the roof by detecting the parameters while drilling, that is, whether the roof appears Layer separation and layer separation degree, thus, the subjective judgment of the construction personnel is transformed into the objective judgment of the instrument, and the accuracy of the judgment result is improved.
当第一钻孔和第二钻孔所在区域为不稳定顶板时,立即在第一钻孔内安装锚杆,在第二钻孔内安装锚索。由此,及时地对于围岩进行了补强支护,有效保证了围岩的稳定性,减少了后续作业的风险。When the area where the first drill hole and the second drill hole are located is an unstable roof, the anchor rod is immediately installed in the first drill hole, and the anchor cable is installed in the second drill hole. As a result, the surrounding rock is reinforced and supported in a timely manner, which effectively ensures the stability of the surrounding rock and reduces the risk of subsequent operations.
在一些实施例中,后期补打锚索的过程包括以下步骤:钻机在顶板打设第二钻孔;当检测装置分析随钻参数未达到离层临界值时,按照设定的补强锚索支护距开挖面的距离安装锚索;当检测装置分析随钻参数达到离层临界值时,判定顶板为不稳定顶板,发出预警提示,减小补强支护的第二钻孔距开挖面的距离,并在第二钻孔内安装锚索,直至不少于二次的随钻参数持续小于离层临界值时,恢复设定的补强锚索支护距开挖面的距离。In some embodiments, the process of supplementing the anchor cable in the later stage includes the following steps: the drilling rig drills a second hole in the roof; when the detection device analyzes that the parameters while drilling does not reach the critical value of separation, the anchor cable is reinforced according to the set value. The anchor cable is installed at the distance between the support and the excavation surface; when the parameters analyzed by the detection device while drilling reaches the critical value of the separation layer, the roof is determined to be unstable, and a warning prompt is issued to reduce the distance between the second drilling hole of the reinforcement support The distance between the excavation surface and the anchor cable is installed in the second drilling hole, until the parameter while drilling no less than twice is continuously less than the critical value of the separation layer, restore the set distance between the reinforcement anchor cable support and the excavation surface .
在一些实施例中,所述随钻参数包括钻机推力、推进速度、钻杆扭矩、钻杆转速、钻杆推进距离以及水压、水流量中的至少一者,当钻头经过离层时,钻机推力骤减,钻杆扭矩骤减、钻杆转速骤增到其在空气中的转速、钻杆推进速度骤增,水压骤降、水流量骤增,检测装置据此识别离层。In some embodiments, the parameters while drilling include drilling rig thrust, advancing speed, drill pipe torque, drill pipe rotational speed, drill pipe advancing distance, and at least one of water pressure and water flow rate. When the drill bit passes through the separation layer, the drilling rig The thrust decreases sharply, the torque of the drill pipe decreases sharply, the rotational speed of the drill pipe increases sharply to its rotational speed in the air, the advancing speed of the drill pipe increases sharply, the water pressure drops sharply, and the water flow rate increases sharply.
在一些实施例中,所述检测装置包括用于测量所述随钻参数的传感器组件及数据智能分析系统,传感器组件和数据智能分析系统相连;传感器组件检测打孔时的随钻参数后,并将随钻参数传递至数据智能分析系统;数据智能分析系统分析和计算随钻参数,数据智能分析系统将随钻参数的计算结果与离层临界值比对,由此判定顶板的状态;数据智能分析系统还根据随钻参数的计算结果,确定不稳定顶板的离层位置和离层开度。In some embodiments, the detection device includes a sensor assembly for measuring the parameters while drilling and an intelligent data analysis system, the sensor assembly is connected to the intelligent data analysis system; after the sensor assembly detects the parameters while drilling, and Transfer the parameters while drilling to the data intelligent analysis system; the data intelligent analysis system analyzes and calculates the while drilling parameters, and the data intelligent analysis system compares the calculation results of the while drilling parameters with the separation threshold value, thereby determining the state of the roof; data intelligence The analysis system also determines the layer separation position and layer separation opening of the unstable roof according to the calculation results of the parameters while drilling.
在一些实施例中,钻杆推进距离、钻杆扭矩以及钻杆转速的变化率组成了第一特征值;水压和水流量的变化率组成了第二特征值;数据智能分析系统通过综合分析和运算第一特征值和第二特征值,根据第一特征值和第二特征值的运算结果确定离层位置和离层开度。In some embodiments, the rate of change of drill pipe advancing distance, drill pipe torque and drill pipe rotational speed constitutes the first characteristic value; the rate of change of water pressure and water flow constitutes the second characteristic value; The first eigenvalue and the second eigenvalue are summed and calculated, and the bed-off position and the bed-off opening degree are determined according to the operation result of the first eigenvalue and the second eigenvalue.
在一些实施例中,所述钻机打设第一钻孔/第二钻孔时,若存在至少两个第一钻孔/第二钻孔中测得的随钻参数大于离层临界值,判定打孔区域所在顶板为不稳定顶板。In some embodiments, when the drilling rig drills the first borehole/second borehole, if there are at least two first boreholes/second boreholes, and the measured while drilling parameter is greater than the separation threshold value, it is determined that The top plate where the punched area is located is an unstable top plate.
在一些实施例中,所述钻机打设第一钻孔/第二钻孔时,若存在至少两个第一钻孔/第二钻孔中测得的离层位置位于锚杆/锚索尾部0~1.2m范围内,则锚杆和锚索采用加长锚固、全长锚固或带压锚固中的任意一种锚固方式。In some embodiments, when the drilling rig drills the first borehole/second borehole, if there are at least two first boreholes/second boreholes, the measured layer separation position is located at the tail of the anchor rod/anchor cable Within the range of 0 to 1.2m, the anchor rod and anchor cable shall adopt any anchoring method among lengthened anchoring, full-length anchoring or pressure anchoring.
在一些实施例中,当所有锚杆和锚索安装完毕,检测装置根据锚杆、锚索的分布范围内监测到的裂隙,自动连接生成包含裂隙场的巷道三维数字模型。In some embodiments, when all bolts and cables are installed, the detection device automatically connects and generates a three-dimensional digital model of the roadway including the crack field according to the cracks detected within the distribution range of the bolts and cables.
在一些实施例中,开挖进尺的长度范围为800mm~1500mm;邻近开挖面的锚杆和开挖面的距离包括若干个开挖进尺,为0.3m~20m;邻近开挖面的锚杆和开挖面的距离的选择需根据不稳定顶板的存在与否以及邻近开挖面的不稳定顶板和开挖面的距离而确定。In some embodiments, the length of the excavation footage ranges from 800mm to 1500mm; the distance between the anchor rod adjacent to the excavation face and the excavation face includes several excavation footages, ranging from 0.3m to 20m; the anchor rod adjacent to the excavation face The distance to the excavation face is selected based on the presence or absence of an unstable roof and the distance between the unstable roof adjacent to the excavation face and the excavation face.
在一些实施例中,邻近开挖面的锚索和开挖面的距离包括若干个开挖进尺,为2m~20m;邻近开挖面的锚杆和开挖面的距离的选择需根据不稳定顶板的存在与否以及邻近开挖面的不稳定顶板和开挖面的距离而确定。In some embodiments, the distance between the anchor cable adjacent to the excavation surface and the excavation surface includes several excavation footage, ranging from 2m to 20m; the distance between the anchor rod and the excavation surface adjacent to the excavation surface is selected according to instability The presence or absence of the roof and the distance between the unstable roof adjacent to the cut face and the cut face are determined.
附图说明Description of drawings
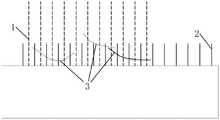
图1是根据本发明实施例的围岩稳定性判定、预警和支护方法的巷道的示意图。FIG. 1 is a schematic diagram of a roadway of a method for determining, warning and supporting surrounding rock stability according to an embodiment of the present invention.
图2是根据本发明实施例的围岩稳定性判定、预警和支护方法的钻机进入离层的示意图。FIG. 2 is a schematic diagram of the drilling rig entering the separation layer according to the surrounding rock stability determination, early warning and support method according to an embodiment of the present invention.
图3是根据本发明实施例的围岩稳定性判定、预警和支护方法的钻机出离层的示意图。FIG. 3 is a schematic diagram of a drilling rig exiting layer according to the method for determining, warning and supporting surrounding rock stability according to an embodiment of the present invention.
图4是根据本发明实施例的围岩稳定性判定、预警和支护方法的巷道顶板离层临界值的示意图。FIG. 4 is a schematic diagram of a roadway roof separation critical value of the method for determining, warning and supporting surrounding rock stability according to an embodiment of the present invention.
图5是根据本发明实施例的围岩稳定性判定、预警和支护方法的检测装置和随钻参数的算法流程图。FIG. 5 is an algorithm flow chart of the detection device and the parameters while drilling of the surrounding rock stability determination, early warning and support method according to an embodiment of the present invention.
附图标记:1、第一钻孔;2、第二钻孔;3、离层;4、力矩传感器;5、推力传感器;6、位移传感器;7、钻机。Reference numerals: 1. First borehole; 2. Second borehole; 3. Separation; 4. Torque sensor; 5. Thrust sensor; 6. Displacement sensor; 7. Drilling rig.
具体实施方式Detailed ways
下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
下面结合图1-图5描述根据本发明实施例的围岩稳定性判定、预警和支护方法。The method for determining the stability of surrounding rock, early warning and supporting according to an embodiment of the present invention will be described below with reference to FIGS. 1 to 5 .
如图1-图3所示,根据本发明实施例的围岩稳定性判定、预警和支护方法,打设锚杆的过程包括以下步骤:掘进机开挖巷道并每完成一次开挖进尺后。钻机7在顶板上打设第一钻孔1,检测装置实时检测钻机7在打孔过程中的随钻参数,并进行智能分析。当检测装置分析随钻参数未达到离层临界值时,按照设定的锚杆支护距开挖面的距离安装锚杆。当检测装置分析随钻参数达到离层临界值时,判定打孔区域所在的顶板为不稳定顶板,发出预警提示,在第一钻孔1内安装锚杆。As shown in Fig. 1-Fig. 3, according to the method for determining the stability of surrounding rock, early warning and support according to the embodiment of the present invention, the process of setting up the bolt includes the following steps: the roadheader excavates the roadway and each time the excavation footage is completed. . The drilling rig 7 drills a
不稳定顶板在此后不少于二次的开挖与支护过程中,减少空顶距离,并打设第二钻孔2进行测量,如发现随钻参数仍超过离层临界值,补打锚索。直至第二钻孔2随钻参数持续小于离层临界值时,不打锚索,直至第一钻孔1随钻参数持续小于离层临界值时,延长空顶距离。In the process of excavation and support for the unstable roof not less than two times, the distance of the roof is reduced, and a
根据本发明实施例的围岩稳定性判定、预警和支护方法,打设第一钻孔1和第二钻孔2时,检测装置通过检测随钻参数,判定顶板的稳定性,即判定顶板是否出现离层3和离层程度,由此,将施工人员的主观判定转变为仪器的客观判定,提高了判定结果的准确性。According to the method for determining the stability of surrounding rock, early warning and supporting, when the
当第一钻孔1和第二钻孔2所在区域为不稳定顶板时,立即在第一钻孔1内安装锚杆,在第二钻孔2内安装锚索。由此,及时地对于围岩进行了补强支护,有效保证了围岩的稳定性,减少了后续作业的风险。When the area where the
可以理解地,第一钻孔1既用于判定顶板的稳定性,又用于安装锚杆。第二钻孔2既用于判定顶板的稳定性,又用于安装锚索。Understandably, the
在一些实施例中,如图1-图3所示,后期补打锚索的过程包括以下步骤:钻机7在顶板打设第二钻孔2。当检测装置分析随钻参数未达到离层临界值时,按照设定的补强锚索支护距开挖面的距离安装锚索。In some embodiments, as shown in FIGS. 1-3 , the process of supplementing the anchor cable in the later stage includes the following steps: the
当检测装置分析随钻参数达到离层临界值时,判定顶板为不稳定顶板,发出预警提示,减小补强支护的第二钻孔2距开挖面的距离,并在第二钻孔2内安装锚索,直至不少于二次的随钻参数持续小于离层临界值时,恢复设定的补强锚索支护距开挖面的距离。When the detection device analyzes the parameters while drilling to reach the critical value of layer separation, it determines that the roof is unstable, and issues a warning prompt to reduce the distance between the
由此,在后期补打锚索的过程中,当检测装置判定顶板为不稳定顶板时,应改变第二钻孔2/锚杆在不稳定顶板区域的分布情况,即减小补强支护的第二钻孔2距开挖面的距离。换言之,为保证不稳定顶板区域的围岩的稳定性,需对不稳定顶板区域的围岩进行补强加固,由此该区域的锚索的分布密度可设置地更大,以此提升了工作人员作业施工时的安全系数。Therefore, in the process of supplementing the anchor cable in the later stage, when the detection device determines that the roof is an unstable roof, the distribution of the
在一些实施例中,如图1-图3所示,随钻参数包括钻机7推力、推进速度、钻杆扭矩、钻杆转速、钻杆推进距离以及水压、水流量中的至少一者,当钻头经过离层3时,钻机7推力骤减,钻杆扭矩骤减、钻杆转速骤增到其在空气中的转速、钻杆推进速度骤增,水压骤降、水流量骤增,检测装置据此识别离层3。In some embodiments, as shown in FIGS. 1-3 , the parameters while drilling include
另外,检测装置可以根据钻机7推力、钻杆扭矩、钻杆转速、推进速度、钻杆推进距离以及水压、水流量的突变及突变量,识别离层3位置和离层3开度。由此,进一步提高了检测结果的可靠性和准确性。In addition, the detection device can identify the position of the layer 3 and the opening of the layer 3 according to the thrust of the
需要说明地,钻机7的钻头在打设第一钻孔1/第二钻孔2时,需要对钻头加水降温,而上述水压和水流量即为用于为钻头降温的水源的水压和水流量。It should be noted that when the drill bit of the
具体地,随钻参数包括钻机7推力、推进速度、钻杆扭矩、钻杆转速、钻杆推进距离以及水压、水流量。Specifically, the parameters while drilling include the thrust of the
具体地,检测装置包括推力传感器5、速度传感器、力矩传感器4、转速传感器、位移传感器6以及水压传感器、水流量传感器。其中,推力传感器5用于测量钻机7推力,速度传感器用于测量钻机7的推进速度,力矩传感器4用于测量钻杆扭矩,转速传感器用于测量钻杆转速,位移传感器6用于测量钻杆推进距离,水压传感器用于测量水压,水流量传感器用于测量水流量。Specifically, the detection device includes a thrust sensor 5, a speed sensor, a
在一些实施例中,如图1、图4和图5所示,检测装置包括用于测量随钻参数的传感器组件及数据智能分析系统,传感器组件和数据智能分析系统相连。传感器组件检测打孔时的随钻参数后,并将随钻参数传递至数据智能分析系统。数据智能分析系统分析和计算随钻参数,数据智能分析系统将随钻参数的计算结果与离层临界值比对,由此判定顶板的状态。数据智能分析系统还根据随钻参数的计算结果,确定不稳定顶板的离层3位置和离层3开度。In some embodiments, as shown in FIG. 1 , FIG. 4 and FIG. 5 , the detection device includes a sensor assembly for measuring parameters while drilling and an intelligent data analysis system, and the sensor assembly is connected with the intelligent data analysis system. After the sensor component detects the parameters while drilling, and transmits the parameters to the data intelligent analysis system. The data intelligent analysis system analyzes and calculates the parameters while drilling, and the data intelligent analysis system compares the calculation results of the parameters while drilling with the critical value of the separation layer, thereby judging the state of the roof. The data intelligent analysis system also determines the position and opening of the layer 3 of the unstable roof according to the calculation results of the parameters while drilling.
由此,数据智能分析系统通过对于随钻参数的计算实现了不稳定顶板的离层3位置和离层3开度的测量。基本上实现了对于不稳定顶板的离层3的定性分析和定量分析。从而,进一步提升了检测结果的准确性和可靠性。As a result, the data intelligent analysis system realizes the measurement of the position and the opening degree of the floor separation 3 of the unstable roof by calculating the parameters while drilling. The qualitative and quantitative analysis of the separation layer 3 of the unstable roof is basically achieved. Thus, the accuracy and reliability of the detection results are further improved.
需要说明地,数据智能分析系统对于随钻参数的计算结果、离层临界值和离层3开度之间存在函数关系。利用该函数关系可以由上述计算结果的确定值得到离层3开度的确定值。It should be noted that there is a functional relationship between the calculation result of the parameters while drilling, the critical value of the separation layer and the opening of the separation layer 3 by the data intelligent analysis system. Using this functional relationship, the determined value of the opening degree of the separation layer 3 can be obtained from the determined value of the above calculation result.
具体地,数据智能分析系统采用神经网络算法、修正算法和相关权重矩阵等计算方式,由此提升了对随钻参数的处理效果。Specifically, the data intelligent analysis system adopts neural network algorithm, correction algorithm and relevant weight matrix and other calculation methods, thereby improving the processing effect of parameters while drilling.
在一些实施例中,如图1所示,钻杆推进距离、钻杆扭矩以及钻杆转速的变化率组成了第一特征值。水压和水流量的变化率组成了第二特征值。数据智能分析系统通过综合分析和运算第一特征值和第二特征值,根据第一特征值和第二特征值的运算结果确定离层3位置和离层3开度。In some embodiments, as shown in FIG. 1 , the drill rod advancing distance, the drill rod torque, and the rate of change of the drill rod rotational speed constitute the first characteristic value. The rate of change of water pressure and water flow constitutes the second eigenvalue. The data intelligent analysis system comprehensively analyzes and calculates the first eigenvalue and the second eigenvalue, and determines the position of the abscission 3 and the opening of the abscission 3 according to the operation result of the first eigenvalue and the second eigenvalue.
换言之,钻杆推进距离、钻杆扭矩以及钻杆转速的变化率组成了第一矩阵,由该第一矩阵得出第一特征值。而水压和水流量的变化率组成了第二矩阵,由该第二矩阵得出第二特征值。数据智能分析系统对第一特征值和第二特征值进行函数运算,根据运算结果确定离层3位置和离层3开度。In other words, the drilling rod advancing distance, the drilling rod torque and the rate of change of the drilling rod rotational speed form a first matrix, and the first eigenvalue is derived from the first matrix. The rate of change of the water pressure and the water flow constitutes a second matrix, and the second eigenvalue is obtained from the second matrix. The data intelligent analysis system performs a function operation on the first eigenvalue and the second eigenvalue, and determines the position of the layer 3 and the opening of the layer 3 according to the operation result.
由此,进一步地量化分析离层3位置和离层3开度,提升了检测的准确性。As a result, the position of the separation layer 3 and the opening degree of the separation layer 3 are further quantitatively analyzed, and the detection accuracy is improved.
需要说明地,上述变化率为随钻参数在单位时间内的变化量。It should be noted that the above rate of change is the amount of change of the parameters while drilling in unit time.
在一些实施例中,如图1和图4所示,钻机7打设第一钻孔1/第二钻孔2时,若存在至少两个第一钻孔1/第二钻孔2中测得的随钻参数大于离层临界值,判定打孔区域所在顶板为不稳定顶板。In some embodiments, as shown in FIG. 1 and FIG. 4 , when the
由此,避免了误判顶板的情况,保证了检测结果的可靠性。In this way, the misjudgment of the top plate is avoided, and the reliability of the detection result is ensured.
在一些实施例中,如图1-图3所示,钻机7打设第一钻孔1/第二钻孔2时,若存在至少两个第一钻孔1/第二钻孔2中测得的离层3位置位于锚杆/锚索尾部0~1.2m范围内,则锚杆和锚索采用加长锚固、全长锚固或带压锚固中的任意一种锚固方式。In some embodiments, as shown in FIG. 1 to FIG. 3 , when the
由此,保证了锚杆/锚索的锚固效果,保证了对于不稳定顶板的支护效果。Thereby, the anchoring effect of the anchor rod/anchor cable is ensured, and the supporting effect for the unstable roof is ensured.
可以理解地,锚杆/锚索伸入围岩的岩体的端部为上述尾部。若顶板存在离层3时,由于离层3空隙带的范围较大,不利于锚杆/锚索的支护效果。由此锚杆和锚索应采用加长锚固/全长锚固/带压锚固,以提高锚杆的锚固力和支护的可靠性。Understandably, the end of the rock mass where the bolt/cable extends into the surrounding rock is the above-mentioned tail. If there is a separation layer 3 on the top plate, since the range of the gap zone of the separation layer 3 is large, it is not conducive to the supporting effect of the anchor rod/anchor cable. Therefore, the anchor rod and the anchor cable should adopt the extended anchorage/full-length anchorage/with pressure anchorage to improve the anchorage force of the anchor rod and the reliability of the support.
在一些实施例中,当所有锚杆和锚索安装完毕,检测装置根据锚杆、锚索的分布范围内监测到的裂隙,自动连接生成包含裂隙场的巷道三维数字模型。In some embodiments, when all bolts and cables are installed, the detection device automatically connects and generates a three-dimensional digital model of the roadway including the crack field according to the cracks detected within the distribution range of the bolts and cables.
由此,该巷道三维数字模型的建立便于后续系统地分析裂隙场的分布区域以及锚杆的支护方式。另外,还可以根据该巷道三维数字模型进行仿真实验,以得到锚杆的最佳的分布方式和支护方式。由此,进一步细化了围岩稳定性判定和支护的方法。Therefore, the establishment of the three-dimensional digital model of the roadway facilitates the subsequent systematic analysis of the distribution area of the crack field and the support method of the bolt. In addition, simulation experiments can be carried out according to the three-dimensional digital model of the roadway to obtain the best distribution and support modes of the bolts. Therefore, the method for determining the stability of surrounding rock and supporting is further refined.
另外,通过构建裂隙场可以更直观的实现围岩稳定性判定。通过建立围岩裂隙场,可以辨识离层3位置,构建失稳模型,预判失稳形式,确定来压强度。通过前后两次监测获取的裂隙场,可以掌握顶板破裂的速度,为动态支护提供依据。In addition, the determination of surrounding rock stability can be more intuitively achieved by constructing a fracture field. By establishing the surrounding rock fissure field, the position of the separation layer 3 can be identified, the instability model can be constructed, the instability form can be predicted, and the incoming pressure strength can be determined. The crack field obtained by monitoring the two times before and after can grasp the speed of roof rupture and provide a basis for dynamic support.
为了便于理解,具体阐述巷道三维数字模型的选择过程:In order to facilitate understanding, the selection process of the three-dimensional digital model of the roadway is described in detail:
首先,选中分布于裂隙场在巷道走向的两侧的两组支护(锚杆和/或锚索)。First, select two sets of supports (bolts and/or cables) distributed on both sides of the roadway strike in the fracture field.
每组支护包括巷道宽度方向上间隔布置的多个锚杆和/或锚索。Each set of supports includes a plurality of anchor rods and/or anchor cables arranged at intervals in the width direction of the roadway.
锚杆和/或锚索的顶端和底端构成了连接点,将多个连接点依次相连。由此,各连接点所构成的连接线与锚杆和/或锚索所在线段,可以构成一个类似于长方体的模型,该模型即为巷道三维数字模型。The top and bottom ends of the anchor rod and/or the anchor cable form the connection points, connecting a plurality of connection points in sequence. Therefore, the connecting line formed by each connection point and the line segment where the anchor rod and/or anchor cable are located can form a model similar to a cuboid, which is a three-dimensional digital model of the roadway.
在一些实施例中,开挖进尺的长度范围为800mm~1500mm。邻近开挖面的锚杆和开挖面的距离包括若干个开挖进尺,为0.3m~20m。邻近开挖面的锚杆和开挖面的距离的选择需根据不稳定顶板的存在与否以及邻近开挖面的不稳定顶板和开挖面的距离而确定。In some embodiments, the length of the excavation footage ranges from 800mm to 1500mm. The distance between the anchor rod adjacent to the excavation face and the excavation face includes several excavation footage, which is 0.3m to 20m. The choice of the distance between the anchor rod adjacent to the excavation face and the excavation face should be determined according to the presence or absence of an unstable roof and the distance between the unstable roof adjacent to the excavation face and the excavation face.
具体地,当邻近开挖面的多个开挖进尺内均不存在不稳定顶板。由此,可以将邻近开挖面的锚杆和开挖面的距离选择地较长。然而,当邻近开挖面的多个开挖进尺内存在不稳定顶板。首先要对该不稳定顶板进行支护。由于该不稳定顶板会降低围岩的稳定性,因此,此时邻近开挖面的锚杆和开挖面的距离应选择地较短,以便于锚杆实现了对于围岩良好的支护效果。Specifically, when there is no unstable roof in multiple excavation footages adjacent to the excavation face. Thereby, the distance between the bolt adjacent to the excavation face and the excavation face can be selected to be longer. However, unstable roofs exist within multiple excavation footages adjacent to the excavation face. First, support the unstable roof. Since the unstable roof will reduce the stability of the surrounding rock, the distance between the bolt adjacent to the excavation surface and the excavation surface should be selected to be short, so that the bolt can achieve a good supporting effect on the surrounding rock. .
进一步地,若开挖进尺内的顶板为稳定顶板,则该开挖进尺内,所用锚杆的数量不少于4根,所用锚杆的长度为2m~3m。Further, if the roof in the excavation footage is a stable roof, within the excavation footage, the number of bolts used is not less than 4, and the length of the bolts used is 2m to 3m.
在一些实施例中,邻近开挖面的锚索和开挖面的距离包括若干个开挖进尺,为2m~20m。邻近开挖面的锚索和开挖面的距离的选择需根据不稳定顶板的存在与否以及邻近开挖面的不稳定顶板和开挖面的距离而确定。In some embodiments, the distance between the anchor cable adjacent to the excavation face and the excavation face includes several excavation footage, ranging from 2m to 20m. The choice of the distance between the anchor cable adjacent to the excavation face and the excavation face shall be determined according to the presence or absence of an unstable roof and the distance between the unstable roof adjacent to the excavation face and the excavation face.
具体地,当邻近开挖面的多个开挖进尺内均不存在不稳定顶板。由此,可以将邻近开挖面的锚索和开挖面的距离选择地较长。然而,当邻近开挖面的多个开挖进尺内存在不稳定顶板。首先要对该不稳定顶板进行支护。由于该不稳定顶板会降低围岩的稳定性,因此,此时邻近开挖面的锚索和开挖面的距离应选择地较短,以便于锚索实现了对于围岩良好的支护效果。Specifically, when there is no unstable roof in multiple excavation footages adjacent to the excavation face. Thereby, the distance between the anchor cable adjacent to the excavation face and the excavation face can be selected to be longer. However, unstable roofs exist within multiple excavation footages adjacent to the excavation face. First, support the unstable roof. Since the unstable roof will reduce the stability of the surrounding rock, the distance between the anchor cable adjacent to the excavation surface and the excavation surface should be selected to be short, so that the anchor cable can achieve a good supporting effect on the surrounding rock. .
进一步地,若开挖进尺内的顶板为稳定顶板,则该开挖进尺内,所用锚索的数量为2~3根,所用锚索的长度为4m~7m。Further, if the roof in the excavation footage is a stable roof, within the excavation footage, the number of anchor cables used is 2 to 3, and the length of the used anchor cables is 4m to 7m.
根据本发明实施例的围岩稳定性判定、预警和支护方法,当钻头进出离层3时,对钻头的扭矩和转速进行监测、记录,计算得出钻头扭矩、转速的变化率,通过不稳定定板的大量的第一钻孔1和/或第二钻孔2结合,测量并标定离层3宽度。获取钻头进出离层3时其扭矩和转速的变化率和突变点,检测装置根据该突变点和智能算法计算出钻杆推进长度及总推进长度,根据该钻杆推进长度及总推进长度确定离层3位置。According to the method for determining the stability of surrounding rock, early warning and supporting, when the drill bit enters and leaves the separation layer 3, the torque and rotational speed of the drill bit are monitored and recorded, and the rate of change of the drill bit torque and rotational speed is calculated. A large number of
当钻头进出离层3时,对水压和水量进行监测和记录,通过与此同时的正常水压和水量对比,确定离层3是否存在以及离层3大小。When the drill bit enters and exits the separation layer 3, the water pressure and water volume are monitored and recorded, and the existence of the separation layer 3 and the size of the separation layer 3 are determined by comparing the normal water pressure and water volume at the same time.
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。In the description of the present invention, it should be understood that the terms "center", "longitudinal", "lateral", "length", "width", "thickness", "upper", "lower", "front", " Rear, Left, Right, Vertical, Horizontal, Top, Bottom, Inner, Outer, Clockwise, Counterclockwise, Axial, The orientation or positional relationship indicated by "radial direction", "circumferential direction", etc. is based on the orientation or positional relationship shown in the drawings, and is only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying the indicated device or element It must have a specific orientation, be constructed and operate in a specific orientation, and therefore should not be construed as a limitation of the present invention.
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。In addition, the terms "first" and "second" are only used for descriptive purposes, and should not be construed as indicating or implying relative importance or implying the number of indicated technical features. Thus, a feature delimited with "first", "second" may expressly or implicitly include at least one of that feature. In the description of the present invention, "plurality" means at least two, such as two, three, etc., unless otherwise expressly and specifically defined.
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。In the present invention, unless otherwise expressly specified and limited, terms such as "installation", "connection", "connection", "fixation" and other terms should be understood in a broad sense, for example, it may be a fixed connection or a detachable connection , or integrated; it can be a mechanical connection or an electrical connection or can communicate with each other; it can be directly connected or indirectly connected through an intermediate medium, it can be the internal connection of two components or the interaction relationship between the two components, unless otherwise expressly qualified. For those of ordinary skill in the art, the specific meanings of the above terms in the present invention can be understood according to specific situations.
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。In the present invention, unless otherwise expressly specified and limited, a first feature "on" or "under" a second feature may be in direct contact between the first and second features, or the first and second features indirectly through an intermediary touch. Also, the first feature being "above", "over" and "above" the second feature may mean that the first feature is directly above or obliquely above the second feature, or simply means that the first feature is level higher than the second feature. The first feature being "below", "below" and "below" the second feature may mean that the first feature is directly below or obliquely below the second feature, or simply means that the first feature has a lower level than the second feature.
在本发明中,术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。In this disclosure, the terms "one embodiment," "some embodiments," "example," "specific example," or "some examples" and the like mean a specific feature, structure, material, or description described in connection with the embodiment or example. Features are included in at least one embodiment or example of the invention. In this specification, schematic representations of the above terms are not necessarily directed to the same embodiment or example. Furthermore, the particular features, structures, materials or characteristics described may be combined in any suitable manner in any one or more embodiments or examples. Furthermore, those skilled in the art may combine and combine the different embodiments or examples described in this specification, as well as the features of the different embodiments or examples, without conflicting each other.
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。Although the embodiments of the present invention have been shown and described above, it should be understood that the above embodiments are exemplary and should not be construed as limiting the present invention. Embodiments are subject to variations, modifications, substitutions and variations.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210868895.5ACN115163055A (en) | 2022-07-22 | 2022-07-22 | Surrounding rock stability judging, early warning and supporting method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210868895.5ACN115163055A (en) | 2022-07-22 | 2022-07-22 | Surrounding rock stability judging, early warning and supporting method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115163055Atrue CN115163055A (en) | 2022-10-11 |
Family
ID=83497195
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210868895.5APendingCN115163055A (en) | 2022-07-22 | 2022-07-22 | Surrounding rock stability judging, early warning and supporting method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115163055A (en) |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4831600A (en)* | 1986-12-31 | 1989-05-16 | Schlumberger Technology Corporation | Borehole logging method for fracture detection and evaluation |
| CN103244101A (en)* | 2013-04-27 | 2013-08-14 | 中国矿业大学 | Rock stratum quality evaluation method along drilling |
| CN103993879A (en)* | 2014-06-10 | 2014-08-20 | 安徽理工大学 | Boom-type roadheader mounted tunneling anchor-along drilling integrated drilling machine |
| CN104806275A (en)* | 2015-02-12 | 2015-07-29 | 中铁工程装备集团有限公司 | Coal roadway rapid support method in unstable surrounding rock condition |
| CN104914484A (en)* | 2015-05-31 | 2015-09-16 | 西安科技大学 | Combined test device and test method for roadway surrounding rock stability |
| CN105422088A (en)* | 2015-11-11 | 2016-03-23 | 中国煤炭科工集团太原研究院有限公司 | Coal mine roadway geological parameter on-line monitoring system |
| US20160341834A1 (en)* | 2015-05-20 | 2016-11-24 | Baker Hughes Incorporated | Prediction of formation and stratigraphic layers while drilling |
| US20170016325A1 (en)* | 2013-12-17 | 2017-01-19 | Sandvik Mining And Construction Oy | Arrangement and method of utilizing rock drilling information |
| CN106593424A (en)* | 2016-12-05 | 2017-04-26 | 中国矿业大学 | Device and method for while-drilling detection of roadway roof rock Protodyakonov coefficient based on sound level meter |
| CN107956481A (en)* | 2017-12-08 | 2018-04-24 | 陕西煤业化工技术研究院有限责任公司 | A kind of suspension device for superelevation tunnel gob side entry retaining |
| CN110593875A (en)* | 2019-09-26 | 2019-12-20 | 中国矿业大学 | A gob-side driving method based on grouting and anchor cables based on the full cycle of roadway service |
| WO2021088190A1 (en)* | 2019-11-06 | 2021-05-14 | 山东科技大学 | Method for using multiple parameters and measurements while drilling to determine coal mass stress peak region and issue early warning |
| CN113175302A (en)* | 2021-06-07 | 2021-07-27 | 中国矿业大学 | Intelligent rock mass quality sensing small-sized drilling machine system and evaluation method |
- 2022
- 2022-07-22CNCN202210868895.5Apatent/CN115163055A/enactivePending
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4831600A (en)* | 1986-12-31 | 1989-05-16 | Schlumberger Technology Corporation | Borehole logging method for fracture detection and evaluation |
| CN103244101A (en)* | 2013-04-27 | 2013-08-14 | 中国矿业大学 | Rock stratum quality evaluation method along drilling |
| US20170016325A1 (en)* | 2013-12-17 | 2017-01-19 | Sandvik Mining And Construction Oy | Arrangement and method of utilizing rock drilling information |
| CN103993879A (en)* | 2014-06-10 | 2014-08-20 | 安徽理工大学 | Boom-type roadheader mounted tunneling anchor-along drilling integrated drilling machine |
| CN104806275A (en)* | 2015-02-12 | 2015-07-29 | 中铁工程装备集团有限公司 | Coal roadway rapid support method in unstable surrounding rock condition |
| US20160341834A1 (en)* | 2015-05-20 | 2016-11-24 | Baker Hughes Incorporated | Prediction of formation and stratigraphic layers while drilling |
| CN104914484A (en)* | 2015-05-31 | 2015-09-16 | 西安科技大学 | Combined test device and test method for roadway surrounding rock stability |
| CN105422088A (en)* | 2015-11-11 | 2016-03-23 | 中国煤炭科工集团太原研究院有限公司 | Coal mine roadway geological parameter on-line monitoring system |
| CN106593424A (en)* | 2016-12-05 | 2017-04-26 | 中国矿业大学 | Device and method for while-drilling detection of roadway roof rock Protodyakonov coefficient based on sound level meter |
| CN107956481A (en)* | 2017-12-08 | 2018-04-24 | 陕西煤业化工技术研究院有限责任公司 | A kind of suspension device for superelevation tunnel gob side entry retaining |
| CN110593875A (en)* | 2019-09-26 | 2019-12-20 | 中国矿业大学 | A gob-side driving method based on grouting and anchor cables based on the full cycle of roadway service |
| WO2021088190A1 (en)* | 2019-11-06 | 2021-05-14 | 山东科技大学 | Method for using multiple parameters and measurements while drilling to determine coal mass stress peak region and issue early warning |
| CN113175302A (en)* | 2021-06-07 | 2021-07-27 | 中国矿业大学 | Intelligent rock mass quality sensing small-sized drilling machine system and evaluation method |
Non-Patent Citations (1)
| Title |
|---|
| 陈加胜;邓海顺;高明中;成云海;王传礼;: "掘进巷道顶板岩层随钻识别研究", 采矿与安全工程学报, no. 02, 15 March 2016 (2016-03-15), pages 271 - 277* |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10208595B2 (en) | Arrangement and method of utilizing rock drilling information | |
| CN110398784A (en) | A Method for Evaluating Surrounding Rock Stability of Tunnels Crossing Fault Fractured Zones | |
| CN111550193A (en) | An engineering exploration drill bit and method for early warning of buried metal pipelines | |
| WO2024207790A1 (en) | System and method for monitoring roof overburden and coal pillar of gob-side entry | |
| SE1950851A1 (en) | Method and system for estimating wear of a drill bit | |
| CN110397458A (en) | Three-dimensional reinforcement construction method suitable for collapse tunnel extension | |
| CN112901272A (en) | Geophysical prospecting and drilling cooperative advanced water detection and drainage construction method | |
| CN110579194B (en) | Field test method and application of fracture position of lateral basic top rock beam in gob-side roadway | |
| CN116066174A (en) | Method for detecting small structure of coal seam in local gas control process | |
| CN109886550B (en) | Comprehensive evaluation method of coal mine surface fracturing hard roof control effect of strong mine pressure | |
| CN115163055A (en) | Surrounding rock stability judging, early warning and supporting method | |
| CN111058819A (en) | Method for covering hard top plate on hydraulic fracture treatment working face | |
| CN112324489B (en) | Gas drainage drill hole arrangement method for large-section tunnel penetrating through coal seam with small included angle | |
| CN113958262A (en) | System device for adjusting operation parameters of raise boring machine in real time through ultrasonic detection | |
| CN113833432B (en) | Hydraulic fracturing weakening and pressure relief construction method and construction system | |
| CN117888948A (en) | Method for dredging mine empty water | |
| CN115059510B (en) | Method and device for predicting rock burst danger by uniform-speed drilling cuttings | |
| CN107561161A (en) | A kind of method for early warning of the disconnected release of the old bursting in colliery | |
| CN111594120A (en) | High-stress underground pressure relief method | |
| CN115234303A (en) | Method and device for predicting rock burst danger by fixed-force drill cuttings | |
| CN119825330B (en) | Self-adaptive control method and control system for drilling and anchoring of airborne drill boom | |
| CN115263273B (en) | Surrounding rock performance while drilling evaluation method | |
| CN222649942U (en) | Novel drilling equipment for preventing slurry overflow in directional drilling construction | |
| CN118774970B (en) | Cross-fault cutting and rock mass sliding monitoring method | |
| CN117449903B (en) | Stope bottom plate damage depth monitoring method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |