CN115153631A - Method for inspecting Achilles tendon and ultrasonic imaging equipment - Google Patents
Method for inspecting Achilles tendon and ultrasonic imaging equipmentDownload PDFInfo
- Publication number
- CN115153631A CN115153631ACN202210828420.3ACN202210828420ACN115153631ACN 115153631 ACN115153631 ACN 115153631ACN 202210828420 ACN202210828420 ACN 202210828420ACN 115153631 ACN115153631 ACN 115153631A
- Authority
- CN
- China
- Prior art keywords
- achilles tendon
- ultrasound image
- image data
- ultrasound
- probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5284—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving retrospective matching to a physiological signal
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Physiology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及医疗领域,具体涉及一种马跟腱的检查方法和超声成像设备。The invention relates to the medical field, in particular to an inspection method and an ultrasonic imaging device for a horse's Achilles tendon.
背景技术Background technique
赛马受伤最多的就是跟腱与腿骨,对于跟腱受伤的赛马,治疗后需要定期复查跟腱,从而判断恢复情况是否能继续训练还是要退役。The most injured racehorses are the Achilles tendon and leg bones. For racehorses with Achilles tendon injuries, it is necessary to regularly review the Achilles tendon after treatment, so as to determine whether the recovery can continue training or retire.
对马跟腱往往采用B超的检查方式,对马健侧(健康的一侧)和患侧(患病的一侧)的跟腱分别进行检查,在跟腱的不同位置进行检查,测量跟腱不同位置的面积并以此计算狭窄比,患侧同健侧数据进行比对,从而判断跟腱恢复情况。The Achilles tendon in horses is often examined by B-ultrasound. The area of different positions of the tendon is calculated and the stenosis ratio is calculated, and the data of the affected side and the healthy side are compared to judge the recovery of the Achilles tendon.
在马跟腱检查中,兽医先在一条马腿上,往往选择5-7个甚至更多个不同跟腱部位分别进行扫图、存图,然后再在另一侧的马腿上,同样的跟腱位置上再分别进行扫图、存图,所有检查部位扫查完存完图后,再将左右腿上同一跟腱部位的检查图像放到一起进行跟腱面积的测量、面积狭窄比计算。目前跟腱面积的测量主要是靠医生手动在图像上进行标记,然后根据医生标记的范围进行面积计算。需要医生做多个部位的扫查,多次人工识别将左右同一部位的图像进行匹配,多次手动标记跟腱面积进行计算,操作频繁、费时且容易出错。In the horse Achilles tendon examination, the veterinarian first scans and saves images of 5-7 or even more different parts of the Achilles tendon on one horse's leg, and then on the other side of the horse's leg, the same Scan and save the image of the Achilles tendon. After scanning and saving all the inspection parts, put the inspection images of the same Achilles tendon on the left and right legs together to measure the area of the Achilles tendon and calculate the area stenosis ratio. . At present, the measurement of the Achilles tendon area mainly relies on the doctor to manually mark on the image, and then calculate the area according to the range marked by the doctor. Doctors are required to scan multiple parts, perform multiple manual identifications to match the images of the same part on the left and right, and manually mark the Achilles tendon area multiple times for calculation, which are frequent, time-consuming and error-prone.
发明内容SUMMARY OF THE INVENTION
本发明主要提供一种马跟腱的检查方法和超声成像设备,旨在提高马跟腱检查的效率。The invention mainly provides an inspection method and ultrasonic imaging equipment for the equine Achilles tendon, aiming at improving the efficiency of the equine Achilles tendon inspection.
一实施例提供一种超声成像设备,包括:An embodiment provides an ultrasound imaging device, comprising:
探头;probe;
发射电路,用于激励所述探头向目标对象发射超声波;a transmitting circuit, used to excite the probe to transmit ultrasonic waves to the target object;
接收电路,用于通过所述探头接收从所述目标对象返回的超声回波以获得超声回波信号;a receiving circuit, configured to receive ultrasonic echoes returned from the target object through the probe to obtain ultrasonic echo signals;
处理器,用于:processor for:
获取马的患腿跟腱的第三超声影像数据、以及所述患腿在健康时检测得到的第四超声影像数据;所述第三超声影像数据和第四超声影像数据均由探头按照预设的扫图手法扫查跟腱得到;所述第三超声影像数据和第四超声影像数据均包括跟腱多个位置的横切面的超声图像;Acquiring the third ultrasonic image data of the Achilles tendon of the affected leg of the horse and the fourth ultrasonic image data detected when the affected leg is healthy; the third ultrasonic image data and the fourth ultrasonic image data are both preset by the probe according to the preset obtained by scanning the Achilles tendon with the scanning technique; the third ultrasound image data and the fourth ultrasound image data both include ultrasound images of transverse sections of the Achilles tendon at multiple positions;
将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置当前跟腱的横切面超声图像,以及该位置健康时跟腱的横切面超声图像。Matching the third ultrasound image data and the fourth ultrasound image data to obtain ultrasound image groups of multiple positions; wherein, the ultrasound image group of one position includes: the ultrasound image of the transverse section of the current Achilles tendon at the position, and a transverse ultrasound image of the Achilles tendon in a healthy position.
一实施例所述的超声成像设备中,所述处理器还用于:In the ultrasonic imaging device according to an embodiment, the processor is further configured to:
输出同一位置的所述超声图像组;和/或,outputting the set of ultrasound images at the same location; and/or,
识别同一位置的所述超声图像组的两个超声图像中的跟腱区域;identifying the Achilles tendon region in the two ultrasound images of the set of ultrasound images at the same location;
根据同一位置的所述超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量并输出。According to the Achilles tendon regions of the two ultrasound images in the ultrasound image group at the same position, a difference amount for characterizing the size difference between the two Achilles tendon regions is obtained and output.
一实施例所述的超声成像设备中,还包括显示器和输入装置;所述处理器还用于:The ultrasonic imaging apparatus according to an embodiment further includes a display and an input device; the processor is further configured to:
通过所述显示器显示同一位置的所述超声图像组;displaying, by the display, the group of ultrasound images at the same location;
通过所述输入装置接收用户在同一位置的所述超声图像组的两个超声图像中标记的跟腱区域;receiving, by the input device, a region of the Achilles tendon marked by a user in two ultrasound images of the set of ultrasound images at the same location;
根据同一位置的所述超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量;According to the Achilles tendon regions of the two ultrasound images in the ultrasound image group at the same position, obtain a difference amount for characterizing the size difference between the two Achilles tendon regions;
通过所述显示器显示所述差异量。The amount of difference is displayed by the display.
一实施例所述的超声成像设备中,所述差异量包括两个跟腱区域面积的差值、两个跟腱区域面积的归一化差值、两个跟腱区域周长的差值和两个跟腱区域周长的归一化差值中的至少一个。In the ultrasonic imaging device according to an embodiment, the difference amount includes a difference between the areas of the two Achilles tendon regions, a normalized difference between the areas of the two Achilles tendon regions, a difference between the perimeters of the two Achilles tendon regions, and At least one of the normalized differences in the perimeters of the two Achilles tendon regions.
一实施例所述的超声成像设备中,所述预设的扫图手法包括:In the ultrasonic imaging device according to an embodiment, the preset scanning method includes:
探头沿着跟腱的一端移动到另一端进行连续扫图;或者,The probe is moved along the Achilles tendon from one end to the other for continuous scanning; or,
探头按预设顺序分别对多个预设跟腱位置进行扫图。The probe scans multiple preset Achilles tendon positions in a preset sequence.
一实施例所述的超声成像设备中,所述预设的扫图手法包括:探头沿着跟腱的一端匀速移动到另一端进行连续扫图;所述处理器将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组,包括:In the ultrasonic imaging device according to an embodiment, the preset scanning technique includes: moving the probe along one end of the Achilles tendon to the other end at a constant speed to perform continuous scanning; the processor converts the third ultrasonic image data into Matching with the fourth ultrasound image data, an ultrasound image group of multiple positions is matched, including:
根据所述第三超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置;根据所述第四超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置;The position of the Achilles tendon corresponding to the plurality of ultrasonic images is determined according to the time sequence of the plurality of ultrasonic images in the third ultrasonic image data; the multiple ultrasonic images are determined according to the time sequence of the plurality of ultrasonic images in the fourth ultrasonic image data. The position of the Achilles tendon corresponding to each ultrasound image;
将所述第三超声影像数据与第四超声影像数据中同一位置的超声图像进行匹配,得到超声图像组。Matching the third ultrasound image data with the ultrasound images at the same position in the fourth ultrasound image data to obtain an ultrasound image group.
一实施例所述的超声成像设备中,所述探头上设置有用于检测探头高度的传感器;所述处理器将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组,包括:In the ultrasonic imaging device according to an embodiment, the probe is provided with a sensor for detecting the height of the probe; the processor matches the third ultrasonic image data with the fourth ultrasonic image data, and matches more set of ultrasound images at 1 location, including:
所述第三超声影像数据由所述探头分别在多个预设的探头高度的触发下,扫查马的患腿跟腱得到;所述第四超声影像数据由所述探头分别在多个预设的探头高度的触发下,在所述患腿健康时扫查其跟腱得到;或者,获取所述探头在扫查患腿跟腱得到第三超声影像数据的过程中,所述探头上传感器检测的第一高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;获取所述探头在患腿健康时扫查跟腱得到第四超声影像数据的过程中,所述探头上传感器检测的第二高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;The third ultrasound image data is obtained by scanning the Achilles tendon of the affected leg of the horse under the triggering of multiple preset probe heights by the probe respectively; the fourth ultrasound image data is obtained by the probe at multiple preset probe heights respectively. Triggered by the set probe height, scan the Achilles tendon of the affected leg when the affected leg is healthy; or, in the process of obtaining the third ultrasonic image data by scanning the Achilles tendon of the affected leg with the probe, the sensor on the probe is obtained. The first height data detected; the height collected by the sensor at the same moment is taken as the height of the cross-section of the ultrasonic image collected by the probe at this moment; the process of obtaining the fourth ultrasonic image data by scanning the Achilles tendon with the probe when the affected leg is healthy , the second height data detected by the sensor on the probe; the height collected by the sensor at the same moment is taken as the height of the cross-section of the ultrasonic image collected by the probe at this moment;
将所述第三超声影像数据与第四超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。Matching the third ultrasound image data with the ultrasound images of the transverse section at the same height in the fourth ultrasound image data to obtain an ultrasound image group.
一实施例所述的超声成像设备中,所述处理器识别同一位置的所述超声图像组的两个超声图像中的跟腱区域,包括:In the ultrasound imaging apparatus according to an embodiment, the processor identifies the Achilles tendon region in two ultrasound images of the ultrasound image group at the same location, including:
将同一位置的所述超声图像组的两个超声图像分别输入到预先训练好的深度学习模型或机器学习模型中,分别得到所述超声图像组的两个超声图像中的跟腱区域。The two ultrasound images of the ultrasound image group at the same position are respectively input into a pre-trained deep learning model or a machine learning model, and the Achilles tendon regions in the two ultrasound images of the ultrasound image group are obtained respectively.
一实施例所述的超声成像设备中,所述处理器还包括:In the ultrasonic imaging device according to an embodiment, the processor further includes:
取所述跟腱区域边界上任意两点的线段中最长的一条为长轴,以连接所述跟腱区域边界上两点并与所述长轴的垂线重合的线段为短轴,将所述长轴和短轴确定的椭圆作为最终的跟腱区域。Take the longest line segment of any two points on the Achilles tendon region boundary as the long axis, and take the line segment connecting the two points on the Achilles tendon region boundary and overlapping with the vertical line of the long axis as the short axis, taking The ellipse defined by the major and minor axes serves as the final Achilles tendon region.
一实施例所述的超声成像设备中,还包括显示器和用于接收用户的输入的输入装置;所述处理器输出同一位置的所述超声图像组,包括:通过所述显示器显示同一位置的所述超声图像组;所述处理器还用于:The ultrasonic imaging apparatus according to an embodiment further includes a display and an input device for receiving an input from a user; the processor outputting the ultrasonic image group at the same position includes: displaying all the images at the same position through the display the ultrasound image group; the processor is also used for:
在显示的所述超声图像组中,标记出跟腱区域的边界;In the displayed set of ultrasound images, the boundaries of the Achilles tendon region are marked;
通过输入装置接收用户调整所述跟腱区域的边界的操作,根据所述操作调整所述跟腱区域的边界并更新显示。The user's operation of adjusting the boundary of the Achilles tendon region is received through the input device, the boundary of the Achilles tendon region is adjusted according to the operation, and the display is updated.
一实施例所述的超声成像设备中,所述处理器还用于:In the ultrasonic imaging device according to an embodiment, the processor is further configured to:
响应于用于查看历史差异量的指令,获取当前马匹同一跟腱位置不同时期得到的差异量;In response to the instruction for viewing the historical difference amount, obtain the difference amount obtained at the same Achilles tendon position of the current horse in different periods;
根据同一跟腱位置不同时期得到的差异量绘制出差异量曲线并输出。Draw the difference curve according to the difference obtained in different periods of the same Achilles tendon position and output.
一实施例提供一种马跟腱的检查方法,包括:An embodiment provides a method for examining the Achilles tendon of a horse, comprising:
获取马的患腿跟腱的第三超声影像数据、以及所述患腿在健康时检测得到的第四超声影像数据;所述第三超声影像数据和第四超声影像数据均由探头按照预设的扫图手法扫查跟腱得到;所述第三超声影像数据和第四超声影像数据均包括跟腱多个位置的横切面的超声图像;Acquiring the third ultrasonic image data of the Achilles tendon of the affected leg of the horse and the fourth ultrasonic image data detected when the affected leg is healthy; the third ultrasonic image data and the fourth ultrasonic image data are both preset by the probe according to the preset obtained by scanning the Achilles tendon with the scanning technique; the third ultrasound image data and the fourth ultrasound image data both include ultrasound images of transverse sections of the Achilles tendon at multiple positions;
将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置当前跟腱的横切面超声图像,以及该位置健康时跟腱的横切面超声图像。Matching the third ultrasound image data and the fourth ultrasound image data to obtain ultrasound image groups of multiple positions; wherein, the ultrasound image group of one position includes: the ultrasound image of the transverse section of the current Achilles tendon at the position, and a transverse ultrasound image of the Achilles tendon in a healthy position.
一实施例所述的方法中,还包括:In the method described in one embodiment, it also includes:
输出同一位置的所述超声图像组;和/或,outputting the set of ultrasound images at the same location; and/or,
识别同一位置的所述超声图像组的两个超声图像中的跟腱区域;identifying the Achilles tendon region in the two ultrasound images of the set of ultrasound images at the same location;
根据同一位置的所述超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量并输出。According to the Achilles tendon regions of the two ultrasound images in the ultrasound image group at the same position, a difference amount for characterizing the size difference between the two Achilles tendon regions is obtained and output.
一实施例所述的方法中,还包括:In the method described in one embodiment, it also includes:
显示同一位置的所述超声图像组;displaying the set of ultrasound images at the same location;
接收用户在同一位置的所述超声图像组的两个超声图像中标记的跟腱区域;receiving a region of the Achilles tendon marked by the user in two ultrasound images of the set of ultrasound images at the same location;
根据同一位置的所述超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量;According to the Achilles tendon regions of the two ultrasound images in the ultrasound image group at the same position, obtain a difference amount for characterizing the size difference between the two Achilles tendon regions;
显示所述差异量。The amount of difference is displayed.
一实施例所述的方法中,所述差异量包括两个跟腱区域面积的差值、两个跟腱区域面积的归一化差值、两个跟腱区域周长的差值和两个跟腱区域周长的归一化差值中的至少一个。In the method of one embodiment, the difference amount includes a difference between the areas of the two Achilles tendon regions, a normalized difference between the areas of the two Achilles tendon regions, a difference between the perimeters of the two Achilles tendon regions, and At least one of the normalized differences in Achilles tendon region perimeter.
一实施例所述的方法中,所述预设的扫图手法包括:In the method according to an embodiment, the preset scanning method includes:
探头沿着跟腱的一端移动到另一端进行连续扫图;或者,The probe is moved along the Achilles tendon from one end to the other for continuous scanning; or,
探头按预设顺序分别对多个预设跟腱位置进行扫图。The probe scans multiple preset Achilles tendon positions in a preset sequence.
一实施例所述的方法中,所述预设的扫图手法包括:探头沿着跟腱的一端匀速移动到另一端进行连续扫图;所述将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组,包括:In the method according to an embodiment, the preset scanning technique includes: moving the probe along one end of the Achilles tendon to the other end at a constant speed to perform continuous scanning; Four ultrasound image data are matched, and ultrasound image groups of multiple locations are matched, including:
根据所述第三超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置;根据所述第四超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置;The position of the Achilles tendon corresponding to the plurality of ultrasonic images is determined according to the time sequence of the plurality of ultrasonic images in the third ultrasonic image data; the multiple ultrasonic images are determined according to the time sequence of the plurality of ultrasonic images in the fourth ultrasonic image data. The position of the Achilles tendon corresponding to each ultrasound image;
将所述第三超声影像数据与第四超声影像数据中同一位置的超声图像进行匹配,得到超声图像组。Matching the third ultrasound image data with the ultrasound images at the same position in the fourth ultrasound image data to obtain an ultrasound image group.
一实施例所述的方法中,所述探头上设置有用于检测探头高度的传感器;所述将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组,包括:In the method according to an embodiment, the probe is provided with a sensor for detecting the height of the probe; the third ultrasound image data is matched with the fourth ultrasound image data, and ultrasound images at multiple positions are matched. Image group, including:
所述第三超声影像数据由所述探头分别在多个预设的探头高度的触发下,扫查马的患腿跟腱得到;所述第四超声影像数据由所述探头分别在多个预设的探头高度的触发下,在所述患腿健康时扫查其跟腱得到;或者,获取所述探头在扫查患腿跟腱得到第三超声影像数据的过程中,所述探头上传感器检测的第一高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;获取所述探头在患腿健康时扫查跟腱得到第四超声影像数据的过程中,所述探头上传感器检测的第二高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;The third ultrasound image data is obtained by scanning the Achilles tendon of the affected leg of the horse under the triggering of multiple preset probe heights by the probe respectively; the fourth ultrasound image data is obtained by the probe at multiple preset probe heights respectively. Triggered by the set probe height, scan the Achilles tendon of the affected leg when the affected leg is healthy; or, in the process of obtaining the third ultrasonic image data by scanning the Achilles tendon of the affected leg with the probe, the sensor on the probe is obtained. The first height data detected; the height collected by the sensor at the same moment is taken as the height of the cross-section of the ultrasonic image collected by the probe at this moment; the process of obtaining the fourth ultrasonic image data by scanning the Achilles tendon with the probe when the affected leg is healthy , the second height data detected by the sensor on the probe; the height collected by the sensor at the same moment is taken as the height of the cross-section of the ultrasonic image collected by the probe at this moment;
将所述第三超声影像数据与第四超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。Matching the third ultrasound image data with the ultrasound images of the transverse section at the same height in the fourth ultrasound image data to obtain an ultrasound image group.
一实施例所述的方法中,所述识别同一位置的所述超声图像组的两个超声图像中的跟腱区域,包括:In the method according to an embodiment, the identifying the Achilles tendon region in the two ultrasound images of the ultrasound image group at the same location includes:
将同一位置的所述超声图像组的两个超声图像分别输入到预先训练好的深度学习模型或机器学习模型中,分别得到所述超声图像组的两个超声图像中的跟腱区域。The two ultrasound images of the ultrasound image group at the same position are respectively input into a pre-trained deep learning model or a machine learning model, and the Achilles tendon regions in the two ultrasound images of the ultrasound image group are obtained respectively.
一实施例所述的方法中,还包括:In the method described in one embodiment, it also includes:
取所述跟腱区域边界上任意两点的线段中最长的一条为长轴,以连接所述跟腱区域边界上两点并与所述长轴的垂线重合的线段为短轴,将所述长轴和短轴确定的椭圆作为最终的跟腱区域。Take the longest line segment of any two points on the Achilles tendon region boundary as the long axis, and take the line segment connecting the two points on the Achilles tendon region boundary and overlapping with the vertical line of the long axis as the short axis, taking The ellipse defined by the major and minor axes serves as the final Achilles tendon region.
一实施例所述的方法中,所述输出同一位置的所述超声图像组,包括:显示同一位置的所述超声图像组;所述方法还包括:In the method according to an embodiment, the outputting the ultrasound image group at the same position includes: displaying the ultrasound image group at the same position; the method further includes:
在显示的所述超声图像组中,标记出跟腱区域的边界;In the displayed set of ultrasound images, the boundaries of the Achilles tendon region are marked;
接收用户调整所述跟腱区域的边界的操作,根据所述操作调整所述跟腱区域的边界并更新显示。An operation of adjusting the boundary of the Achilles tendon region by the user is received, the boundary of the Achilles tendon region is adjusted according to the operation, and the display is updated.
一实施例所述的方法中,还包括:In the method described in one embodiment, it also includes:
响应于用于查看历史差异量的指令,获取当前马匹同一跟腱位置不同时期得到的差异量;In response to the instruction for viewing the historical difference amount, obtain the difference amount obtained at the same Achilles tendon position of the current horse in different periods;
根据同一跟腱位置不同时期得到的差异量绘制出差异量曲线并输出。Draw the difference curve according to the difference obtained in different periods of the same Achilles tendon position and output.
一实施例提供一种计算机可读存储介质,所述介质上存储有程序,所述程序能够被处理器执行以实现如上所述的方法。An embodiment provides a computer-readable storage medium having a program stored thereon, the program being executable by a processor to implement the method as described above.
依据上述实施例的一种马跟腱的检查方法和超声成像设备,获取马的患腿跟腱的第三超声影像数据、以及所述患腿在健康时检测得到的第四超声影像数据;所述第三超声影像数据和第四超声影像数据均由探头按照预设的扫图手法扫查跟腱得到;所述第三超声影像数据和第四超声影像数据均包括跟腱多个位置的横切面的超声图像;将所述第三超声影像数据与所述第四超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置当前跟腱的横切面超声图像,以及该位置健康时跟腱的横切面超声图像。用同样的手法扫查患腿以及患腿健康时的跟腱,便于后续准确的匹配出超声图像组,采用自动匹配的方式提高了马跟腱检查的效率。According to a method for inspecting the Achilles tendon of a horse and the ultrasonic imaging device according to the above embodiment, the third ultrasonic image data of the Achilles tendon of the affected leg of the horse and the fourth ultrasonic image data obtained by detecting the affected leg when it is healthy are obtained; The third ultrasound image data and the fourth ultrasound image data are obtained by scanning the Achilles tendon with the probe according to a preset scanning technique; The ultrasound image of the slice; the third ultrasound image data and the fourth ultrasound image data are matched to match the ultrasound image groups of multiple positions; wherein, the ultrasound image group of a position includes: the current Achilles tendon at the position Transverse ultrasound images of the Achilles tendon in a healthy position. The same technique is used to scan the affected leg and the Achilles tendon when the affected leg is healthy, which facilitates the subsequent accurate matching of the ultrasound image group, and the automatic matching method improves the efficiency of the horse Achilles tendon inspection.
附图说明Description of drawings
图1为本发明提供的超声成像设备一实施例的结构框图;1 is a structural block diagram of an embodiment of an ultrasound imaging device provided by the present invention;
图2为本发明提供的马跟腱的检查方法一实施例的流程图;Fig. 2 is the flow chart of one embodiment of the inspection method of horse Achilles tendon provided by the present invention;
图3为本发明提供的马跟腱的检查方法另一实施例的流程图;Fig. 3 is the flow chart of another embodiment of the inspection method of horse Achilles tendon provided by the present invention;
图4为图2和图3中,步骤2一实施例的流程图;Fig. 4 is a flowchart of an embodiment of
图5为图2和图3中,步骤2另一实施例的流程图;Fig. 5 is a flowchart of another embodiment of
图6为本发明提供的超声成像设备中,显示器显示的跟腱区域的示意图;6 is a schematic diagram of the Achilles tendon region displayed by a display in the ultrasonic imaging device provided by the present invention;
图7为本发明提供的马跟腱的检查方法又一实施例的流程图;Fig. 7 is the flow chart of another embodiment of the inspection method of horse Achilles tendon provided by the present invention;
图8为本发明提供的马跟腱的检查方法还一实施例的流程图。FIG. 8 is a flowchart of another embodiment of the method for inspecting the Achilles tendon of a horse provided by the present invention.
具体实施方式Detailed ways
下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本申请能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本申请相关的一些操作并没有在说明书中显示或者描述,这是为了避免本申请的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings. Wherein similar elements in different embodiments have used associated similar element numbers. In the following embodiments, many details are described so that the present application can be better understood. However, those skilled in the art will readily recognize that some of the features may be omitted under different circumstances, or may be replaced by other elements, materials, and methods. In some cases, some operations related to the present application are not shown or described in the specification, in order to avoid the core part of the present application from being overwhelmed by excessive description, and for those skilled in the art, these are described in detail. The relevant operations are not necessary, and they can fully understand the relevant operations according to the descriptions in the specification and general technical knowledge in the field.
另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。Additionally, the features, acts, or characteristics described in the specification may be combined in any suitable manner to form various embodiments. At the same time, the steps or actions in the method description can also be exchanged or adjusted in order in a manner obvious to those skilled in the art. Therefore, the various sequences in the specification and drawings are only for the purpose of clearly describing a certain embodiment and are not meant to be a necessary order unless otherwise stated, a certain order must be followed.
本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本申请所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。The serial numbers themselves, such as "first", "second", etc., for the components herein are only used to distinguish the described objects, and do not have any order or technical meaning. The "connection" and "connection" mentioned in this application, unless otherwise specified, include both direct and indirect connections (connections).
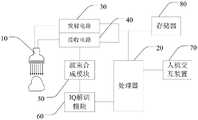
如图1所示,本发明提供的超声成像设备,包括探头(即超声探头)10、发射电路30、接收电路40、处理器20、人机交互装置70和存储器80。As shown in FIG. 1 , the ultrasonic imaging apparatus provided by the present invention includes a probe (ie, an ultrasonic probe) 10 , a transmitting
超声探头10包括由阵列式排布的多个阵元组成的换能器(图中未示出)。阵元用于根据激励电信号发射超声波,或将接收的超声波变换为电信号。因此每个阵元可用于实现电脉冲信号和超声波的相互转换,从而实现向目标对象的生物组织发射超声波、也可用于接收经组织反射回的超声波的回波。The
发射电路30用于根据处理器20的控制,激励超声探头10向目标对象发射超声波。The transmitting
接收电路40用于通过超声探头10接收从目标对象返回的超声回波以获得超声回波信号,还可以对超声回波信号进行处理。接收电路40可以包括一个或多个放大器、模数转换器(ADC)等。The receiving
人机交互装置70用于进行人机交互,例如输出可视化信息以及接收用户的输入。其接收用户的输入可采用键盘、操作按钮、鼠标、轨迹球、触摸板等,也可以采用与显示器集成在一起的触控屏;其输出可视化信息可以采用显示器。The human-
存储器80用于存储各类数据。The
超声成像设备还可以包括波束合成模块50和IQ解调模块60。The ultrasound imaging apparatus may further include a
波束合成模块50和接收电路40信号相连,用于对回波信号进行相应的延时和加权求和等波束合成处理,由于被测组织中的超声波接收点到接收阵元的距离不同,因此,不同接收阵元输出的同一接收点的通道数据具有延时差异,需要进行延时处理,将相位对齐,并将同一接收点的不同通道数据进行加权求和,得到波束合成后的超声图像数据,波束合成模块50输出的超声图像数据也称为射频数据(RF数据)。波束合成模块50将射频数据输出至IQ解调模块60。在有的实施例中,波束合成模块50也可以将射频数据输出至存储器80进行缓存或保存,或将射频数据直接输出至处理器20进行图像处理。The
波束合成模块50可以采用硬件、固件或软件的方式执行上述功能。波束合成模块50可以集成在处理器20中,也可以单独设置,本发明不做限定。The
IQ解调模块60通过IQ解调去除信号载波,提取信号中包含的组织结构信息,并进行滤波去除噪声,此时获取的信号称为基带信号(IQ数据对)。IQ解调模块60将IQ数据对输出至处理器20进行图像处理。在有的实施例中,IQ解调模块60还将IQ数据对输出至存储器80进行缓存或保存,以便处理器20从存储器80中读出数据进行后续的图像处理。The
IQ解调模块60也可以采用硬件、固件或软件的方式执行上述功能。同样的,IQ解调模块60可以集成在处理器20中,也可以单独设置,本发明不做限定。The
处理器20用于配置成能够根据特定逻辑指令处理输入数据的中央控制器电路(CPU)、一个或多个微处理器、图形控制器电路(GPU)或其他任何电子部件,其可以根据输入的指令或预定的指令对外围电子部件执行控制,或对存储器80执行数据读取和/或保存,也可以通过执行存储器80中的程序对输入数据进行处理,例如根据一个或多个工作模式对采集的超声数据执行一个或多个处理操作,处理操作包括但不限于调整或限定超声探头10发出的超声波的形式,生成各种图像帧以供后续人机交互装置70的显示器进行显示,或者调整或限定在显示器上显示的内容和形式,或者调整在显示器上显示的一个或多个图像显示设置(例如超声图像、界面组件、定位感兴趣区域)。The
接收到回波信号时,所采集的超声数据可由处理器20在扫描期间实时地处理,也可以临时存储在存储器80上,并且在联机或离线操作中以准实时的方式进行处理。The acquired ultrasound data may be processed by the
本实施例中,处理器20控制发射电路30和接收电路40的工作,例如控制发射电路30和接收电路40交替工作或同时工作。处理器20还可根据用户的选择或程序的设定确定合适的工作模式,形成与当前工作模式对应的发射序列,并将发射序列发送给发射电路30,以便发射电路30采用合适的发射序列控制超声探头10发射超声波。In this embodiment, the
处理器20还用于对超声数据进行处理,以生成扫描范围内的信号强弱变化的灰度图像,该灰度图像反映组织内部的解剖结构,称为B图像。处理器20可以将B图像输出至人机交互装置70的显示器进行显示。The
本发明主要对目标对象的跟腱的检查方法进行了改进,以提高检查的自动化程度,从而提高了检查效率。故,处理器20还用于获取目标对象的左腿跟腱的第一超声影像数据、以及对应的右腿跟腱的第二超声影像数据;其中,第一超声影像数据由探头10扫查目标对象的左腿跟腱得到,第一超声影像数据包括左腿跟腱多个位置的横切面的超声图像;第二超声影像数据由探头10扫查目标对象的右腿跟腱得到,第二超声影像数据包括右腿跟腱多个位置的横切面的超声图像。处理器20还用于将第一超声影像数据与第二超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置左腿跟腱的横切面超声图像,以及该位置右腿跟腱的横切面超声图像。可见,用户只需对目标对象的左右腿跟腱进行扫图,超声成像设备就能自动匹配出左右腿跟腱同一位置的横切面超声图像,无需用户人工识别,节省了用户的工作量,提高了跟腱检查的效率。The invention mainly improves the inspection method of the Achilles tendon of the target object, so as to improve the automation degree of the inspection, thereby improving the inspection efficiency. Therefore, the
超声成像设备对跟腱的检查方法还可以不止于此,下面通过一些实施例进行详细说明。The method for examining the Achilles tendon by the ultrasonic imaging device may be more than this, which will be described in detail below through some embodiments.
如图2和图3所示的实施例中,目标对象为马,超声成像设备可采用兽用超声成像设备,其对马跟腱的检查方法具体包括如下步骤:In the embodiment shown in FIG. 2 and FIG. 3 , the target object is a horse, and the ultrasonic imaging device can be a veterinary ultrasonic imaging device. The method for inspecting the Achilles tendon of a horse specifically includes the following steps:
步骤1、处理器20获取马的左腿跟腱的第一超声影像数据、以及对应的右腿跟腱的第二超声影像数据。超声影像数据可以从其他设备获取,也可以由本超声成像设备扫查马跟腱得到,本实施例以后者为例进行说明。本实施例中,第一超声影像数据和第二超声影像数据均由探头10按照预设的扫图手法扫查对应的跟腱得到;第一超声影像数据和第二超声影像数据均包括跟腱多个位置的横切面的超声图像。左右腿跟腱采用相同的扫图手法,有利于后续的数据匹配。
预设的扫图手法可以有多种,便于后续的匹配即可。下面列举两种进行说明。There are many preset scanning methods, which are convenient for subsequent matching. Two are listed below for description.
一种扫图手法是:探头沿着跟腱的一端移动到另一端进行连续扫图。例如,用户将探头贴着跟腱的一端,操作人机交互装置70的输入装置使处理器20激活探头10,探头10开始发射超声波并接收超声回波,用户将探头10沿着跟腱的一端移动到另一端,可采用匀速移动,有利于后续的匹配;探头10移动期间,处理器20实时对超声回波数据进行处理,生成实时的超声图像并通过人机交互装置70的显示器显示;探头10移动到跟腱另一端后,用户操作输入装置使处理器20冻结图像。激活探头10到冻结图像的过程为一次扫图。本例中的扫图手法一次扫图就覆盖了整个跟腱,是连续扫图,得到的超声影像数据在时间上是连续的。这段连续的超声影像数据为连续扫图期间(探头从跟腱一端移动到另一端期间)超声回波经过波束合成处理之后的数据,例如可以是一段射频数据,也可以是一段IQ数据对,还可以是一段超声视频,本实施例以后者为例进行说明,即本实施例中连续扫图得到一段超声视频,其包括连续多帧超声图像。采用本扫图手法,兽医在一侧马腿,用探头沿着跟腱从头到尾匀速的进行一次扫图,处理器20识别、计算、保存整条跟腱的超声影像数据(如第一超声影像数据),在另一侧马腿跟腱上做同样的一次扫图检查,得到另一条跟腱的超声影像数据(如第二超声影像数据)。之所以采集左右腿跟腱的超声影像数据,是为了后续通过比较左右腿同一位置的超声图像来判断跟腱受伤情况、恢复情况等。故左右腿可以是左前腿和右前腿,也可以是左后腿和右后腿,这样具有可比性。One scanning technique is to move the probe along one end of the Achilles tendon to the other for continuous scanning. For example, the user places the probe against one end of the Achilles tendon, operates the input device of the human-
另一种扫图手法是:探头按预设顺序(如从上到下或从下到上等)分别对多个预设跟腱位置进行扫图。例举的上一扫图手法是连续扫图,本例扫图手法则是多点扫图或者说是多次扫图。例如,多个预设跟腱位置包括跟腱的两个端部,用户将探头贴着跟腱的一端,操作人机交互装置70的输入装置使处理器20激活探头10,探头10开始发射超声波并接收超声回波,得到跟腱端部的超声影像数据,用户操作输入装置使处理器20冻结图像。之后将探头10移动到下一跟腱位置(如探头下移2cm或上移2cm),继续激活探头10,得到该跟腱位置的超声影像数据后冻结图像。后续的跟腱位置的扫图以此类推,直到所有预设跟腱位置都完成扫图,所有预设跟腱位置的超声影像数据就构成了第一超声影像数据或第二超声影像数据。同样的,本例中,超声影像数据的类型可以是射频数据,也可以是IQ数据对,还可以是超声图像,本例以后者为例进行说明,即本例中的超声影像数据包括各个预设跟腱位置的超声图像。每对一个预设跟腱位置进行扫图,处理器20都根据超声回波生成超声图像并通过显示器显示。采用本扫图手法,兽医在一侧马腿,用探头沿着跟腱从头到尾分别对多个预设跟腱位置进行扫图,处理器20识别、计算、保存各个跟腱位置的超声影像数据(如得到第一超声影像数据),在另一侧马腿跟腱上做同样的扫图检查,得到另一条跟腱的超声影像数据(如得到第二超声影像数据)。Another scanning technique is: the probe scans a plurality of preset Achilles tendon positions in a preset sequence (such as from top to bottom or from bottom to top, etc.). The last scanning method in the example is continuous scanning, and the scanning method in this example is multi-point scanning or multiple scanning. For example, a plurality of preset Achilles tendon positions include two ends of the Achilles tendon, the user attaches the probe to one end of the Achilles tendon, operates the input device of the human-
步骤2、处理器20将第一超声影像数据与第二超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置左腿跟腱的横切面超声图像,以及该位置右腿跟腱的横切面超声图像。匹配的方法有很多,能将左右腿同一跟腱位置的超声图像匹配出来即可。下面例举几种匹配方法进行说明。Step 2: The
第一种匹配方法,本匹配方法跟上一步骤的扫图手法具有关联性,即,要求预设的扫图手法为:探头10沿着跟腱的一端匀速移动到另一端进行连续扫图。如图4所示,本匹配方法包括如下步骤:The first matching method is related to the scanning technique in the previous step, that is, the required preset scanning technique is: the
步骤21、处理器20根据第一超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置。处理器20根据第二超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置。由于跟腱两端部的超声图像(最先得到的超声图像和最后得到的超声图像)是已知的,且探头10在连续扫图时是匀速移动的,因此,超声影像数据的各个超声图像的时间与跟腱位置是一一对应的,处理器20可以在生成超声图像时关联上时间,也可以以帧数来对应时间,以后者为例,假设超声影像数据总计有1000帧超声图像,这1000帧图像的帧数按生成时间排序,则第500帧超声图像对应的跟腱位置就是跟腱的中部,第333帧超声图像对应的是跟腱的1/3位置处。对这1000帧图像的帧数等分也就是对跟腱进行等分,因此能得到各个超声图像对应的跟腱位置。Step 21: The
步骤22、处理器20将第一超声影像数据与第二超声影像数据中同一位置的超声图像进行匹配,得到超声图像组。例如,处理器20在第一超声影像数据中采用预设采样方式(如等分采样)依次采样,得到多个超声图像,在第二超声影像数据中同样采用预设采样方式依次采样,得到多个超声图像;将第一超声影像数据依次采样得到的多个超声图像与第二超声影像数据依次采样得到的多个超声图像一一匹配,得到多个位置的超声图像组。例如,将左右腿跟腱顶端的超声图像匹配成跟腱顶端的超声图像组,将左右腿跟腱上1/3处的超声图像匹配成跟腱上1/3处的超声图像组,将左右腿跟腱中间处的超声图像匹配成跟腱中间处的超声图像组,将左右腿跟腱下1/3处的超声图像匹配成跟腱下1/3处的超声图像组,将左右腿跟腱底端的超声图像匹配成跟腱底端的超声图像组等。Step 22: The
采用本匹配方法,配合用户的扫图手法,能方便快捷的匹配出同一位置的左右腿超声图像。By adopting the matching method and the user's scanning technique, the ultrasound images of the left and right legs at the same position can be matched conveniently and quickly.
第二种匹配方法需要借助其他装置,例如,在探头10上设置用于检测探头高度的传感器,如激光测距传感器等。第一超声影像数据由探头10分别在多个预设的探头高度的触发下,扫查马的左腿跟腱得到;第二超声影像数据由探头10分别在多个预设的探头高度的触发下,扫查马的右腿跟腱得到。换而言之,步骤1的扫图可由传感器来触发,兽医手持探头沿着跟腱的一端移动到另一端,期间传感器检测探头高度,在处于一个预设探头高度时,自动激活探头,之后可自动存图,得到该探头高度对应跟腱位置的超声图像。可见,兽医只需要将探头从跟腱一端移动到另一端即可,操作非常简单,自动化程度高,提高了效率。当然到预设探头高度后传感器也可以只提示兽医,由兽医手动操作来激活探头、存图等。The second matching method requires the help of other devices, for example, a sensor for detecting the height of the probe, such as a laser ranging sensor, is provided on the
对跟腱进行扫图,是对跟腱的横切面进行扫查进而得到超声图像。由于超声图像是已知探头高度触发采集的,因此超声影像数据中各个超声图像所属横切面的高度是已知的。进而,处理器20将第一超声影像数据与第二超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。Scanning the Achilles tendon is to scan the transverse section of the Achilles tendon to obtain an ultrasound image. Since the ultrasound images are acquired triggered by the known height of the probe, the heights of the cross-sections to which each ultrasound image in the ultrasound image data belongs is known. Further, the
第三种匹配方法同样需要借助其他装置,例如,在探头10上设置用于检测探头高度的传感器,如激光测距传感器等。如图5所示,本匹配方法包括如下步骤:The third matching method also requires the help of other devices, for example, a sensor for detecting the height of the probe, such as a laser ranging sensor, is provided on the
步骤21'、处理器20获取探头10在扫查马的左腿跟腱得到第一超声影像数据的过程中,探头上传感器检测的第一高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;换而言之,处理器20根据超声回波数据生成一帧超声图像,将同一时刻传感器检测的高度关联到该帧超声图像,该帧超声图像关联的高度就是探头扫查得到该帧超声图像时所处的高度,也就是该帧超声图像所属跟腱横切面的高度。处理器20获取探头10在扫查马的右腿跟腱得到第二超声影像数据的过程中,探头上传感器检测的第二高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度。Step 21', the
步骤22'、处理器20将第一超声影像数据与第二超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。此种方式相较于第二种方式,数据处理量大一些。采用高度传感器确定超声图像对应的跟腱位置(高度),准确度更高。
得到多个跟腱位置的超声图像组后,有多种处理方式,下面介绍几种。After obtaining the ultrasound image groups of multiple Achilles tendon locations, there are various processing methods, which are described below.
一种是“自动”式,如图2所示,所述方法还包括如下步骤:One is the "automatic" type, as shown in Figure 2, the method further includes the following steps:
步骤3、处理器20获取同一位置的超声图像组的两个超声图像中的跟腱区域。Step 3: The
处理器20可以自动识别同一位置的超声图像组的两个超声图像中的跟腱区域。例如,处理器20将同一位置的超声图像组的两个超声图像分别输入到预先训练好的深度学习模型或机器学习模型中,分别得到超声图像组的两个超声图像中的跟腱区域,当然,有些实施例中也可以采用图像识别技术来确定跟腱区域。The
处理器20也可以通过显示器显示同一位置的超声图像组,还可以在显示超声图像组的两个超声图像时,标记超声图像的左右属性(即标记超声图像是左腿还是右腿的);由兽医在超声图像组的超声图像上标记出跟腱区域。处理器20通过输入装置接收用户在同一位置的超声图像组的一个超声图像中标记的跟腱区域,将其确定为该超声图像的跟腱区域;同样的,通过输入装置接收用户在另一个超声图像中标记的跟腱区域,将其确定为该超声图像的跟腱区域。The
不论是处理器20自动识别出的跟腱区域还是用户手动标记的跟腱区域,还能对其进行进一步处理,便于后续差异量的计算。例如,如图6所示,处理器20取跟腱区域边界(图中虚线所示)上任意两点的线段中最长的一条为长轴a,以连接跟腱区域边界上两点并与长轴的垂线重合的线段为短轴b,将长轴a和短轴b确定的椭圆(图中实线所示)作为最终的跟腱区域。Whether it is the Achilles tendon region automatically identified by the
有些实施例中,不论是自动识别出的跟腱区域、还是用户手动标记的跟腱区域、还是进一步处理得到的椭圆跟腱区域(上述最终的跟腱区域),用户还可以对其进行调整。即,处理器在显示器显示的超声图像组中,标记出跟腱区域的边界,使用户可以对该边界进行调整。处理器20通过输入装置接收用户调整跟腱区域的边界的操作,根据该操作调整跟腱区域的边界并更新显示,后续步骤中用最新的跟腱区域进行计算。In some embodiments, whether it is the automatically identified Achilles tendon region, the Achilles tendon region manually marked by the user, or the elliptical Achilles tendon region obtained by further processing (the above-mentioned final Achilles tendon region), the user can also adjust it. That is, the processor marks the boundary of the Achilles tendon region in the ultrasound image group displayed on the display, so that the user can adjust the boundary. The
步骤4、处理器20根据同一位置的超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量并输出。健康的马跟腱,左右侧同一高度位置的跟腱区域差异很小,若差异过大则说明有一侧跟腱受伤或者还没有恢复。差异量可以包括两个跟腱区域面积的差值、两个跟腱区域面积的归一化差值、两个跟腱区域周长的差值和两个跟腱区域周长的归一化差值中的至少一个。若最新的跟腱区域为上述的椭圆跟腱区域,则处理器20根据椭圆的长短轴可计算跟腱区域面积、跟腱区域周长等,进而计算出上述差异量。若最新的跟腱区域不是标准的椭圆,则处理器20可统计跟腱区域内的像素总数,乘以每个像素代表的实际面积得到跟腱区域面积,可统计跟腱区域边界的像素总数,再乘以对应像素的长或宽得到跟腱区域周长,进而计算出上述差异量。当然,还可以先将两个跟腱区域叠加,得到差异区域,根据差异区域得到面积差值和/或周长差值。两个跟腱区域面积的归一化差值,其中的归一化方式可采用现有方式,如归一化差值为:两个跟腱区域面积差值的绝对值除以大的跟腱区域的面积,即两个跟腱区域面积的归一化差值为两个跟腱区域面积的狭窄比。同样的,两个跟腱区域周长的归一化差值,其中的归一化方式可采用现有方式,如归一化差值为:两个跟腱区域周长差值的绝对值除以大的跟腱区域的周长。Step 4: The
处理器20输出差异量,例如通过显示器显示差异量,兽医看到差异量就明白左右腿跟腱的差异,进而获知患腿的受伤或恢复情况。在显示差异量时,还可以显示对应的跟腱位置,上述步骤匹配了多个超声图像组,就显示对应的多个跟腱位置及其差异量,供兽医参考。例如,在显示器的显示界面上显示马腿示意图,在该示意图上标记出跟腱位置及其对应的差异量。不同的跟腱位置及其差异量同时显示或者分别显示皆可。The
目前马跟腱的检查完全是手动的,超声成像设备只提供扫图得到超声图像的功能。而兽医需要对马跟腱的多个位置扫图以得到其横切面的超声图像,而且两条腿都需要扫图,需要花费很长的时间。兽医通常只能蹲在马的两腿之间或侧面进行操作,操作的时间越长,马越容易烦躁,被马腿伤到的概率越大,而本发明提供的超声成像设备,让兽医只需要专注扫图,甚至只需要从跟腱一端扫到另一端即可,操作时间很短,后续自动出结果(差异量),自动化程度很高,即提高了马跟腱的检查效率,又提高了兽医工作的安全性。At present, the examination of Achilles tendon in horses is completely manual, and the ultrasound imaging equipment only provides the function of scanning to obtain ultrasound images. The veterinarian needs to scan multiple positions of the horse's Achilles tendon to obtain an ultrasound image of its transverse section, and it takes a long time to scan both legs. The veterinarian can usually only squat between the legs or the side of the horse to perform the operation. The longer the operation time, the more irritable the horse is and the greater the probability of being injured by the horse's legs. The ultrasonic imaging device provided by the present invention allows the veterinarian to only need to Focus on scanning, even only need to scan from one end of the Achilles tendon to the other end, the operation time is very short, the follow-up results (difference amount) are automatically produced, and the degree of automation is very high, which not only improves the inspection efficiency of the horse Achilles tendon, but also improves the Safety of veterinary work.
本发明还能支持四肢跟腱的检查,即接连执行两次图2所示的方法,得到前腿多个跟腱位置的差异量和后退多个跟腱位置的差异量,并显示这些差异量,兽医一次检查马四肢的跟腱情况,效率更高。The present invention can also support the examination of the Achilles tendon of the four limbs, that is, the method shown in FIG. 2 is executed twice in succession to obtain the difference amount of multiple Achilles tendon positions in the front leg and the difference amount of multiple Achilles tendon positions in the retreat, and display these differences. , the veterinarian checks the Achilles tendon of the horse's limbs at one time, which is more efficient.
处理器20还将上述多个跟腱位置及其差异量存储到存储器80中,提供相应显示界面供兽医后续查看。例如,兽医操作输入装置,发出用于查看历史差异量的指令。处理器20响应于用于查看历史差异量的指令,获取当前马匹同一跟腱位置不同时期得到的差异量;根据同一跟腱位置不同时期得到的差异量绘制出差异量曲线并输出,同样的,可以输出给显示器显示该差异量曲线。方便医生综合评估马跟腱的恢复情况。The
图2所示的方法,步骤2之后能自动得到差异量,当然一些实施例中,差异量也可以由兽医手动计算或评估。如图3所示,步骤2之后,一种马跟腱的检查方法还包括如下步骤:In the method shown in FIG. 2, the difference amount can be obtained automatically after
步骤3’、处理器20输出同一位置的超声图像组。例如,处理器20将同一位置的超声图像组输出给显示器显示,还可以在显示超声图像组的两个超声图像时,标记超声图像的左右属性(即标记超声图像是左腿还是右腿的)。兽医看到同一跟腱位置的左腿超声图像和右腿超声图像后,就能自行测量、比较、计算该跟腱位置的跟腱差异,从而判断患腿的跟腱情况。当然,跟腱区域也可以由超声成像设备自动识别和显示,见图2实施例的步骤3,在此不做赘述。Step 3', the
上述实施例对跟腱的检查主要基于左右腿的差异,而有些实施例中,兽医可能定期对马跟腱进行超声检查,从而积累了各个时期跟腱的超声影像数据,可以用同一条腿不同时期的超声图像的差异来做判断依据。具体如图7和图8所示,包括如下步骤:The examination of the Achilles tendon in the above-mentioned embodiments is mainly based on the difference between the left and right legs. In some embodiments, the veterinarian may regularly perform ultrasound examination on the Achilles tendon of horses, thereby accumulating the ultrasound image data of the Achilles tendon in different periods. The difference between the ultrasound images of the period can be used as a basis for judgment. Specifically, as shown in Figure 7 and Figure 8, it includes the following steps:
步骤6、处理器20获取马的患腿跟腱的第三超声影像数据、以及患腿在健康时检测得到的第四超声影像数据;第三超声影像数据和第四超声影像数据均由探头按照预设的扫图手法扫查跟腱得到;第三超声影像数据和第四超声影像数据均包括跟腱多个位置的横切面的超声图像。Step 6: The
第三超声影像数据和第四超声影像数据均由探头10按照预设的扫图手法扫查对应的跟腱得到;第三超声影像数据和第四超声影像数据均包括跟腱多个位置的横切面的超声图像。Both the third ultrasound image data and the fourth ultrasound image data are obtained by scanning the corresponding Achilles tendon with the
预设的扫图手法可以有多种。There are many preset scanning methods.
一种扫图手法是:探头沿着跟腱的一端移动到另一端进行连续扫图。例如,用户将探头贴着跟腱的一端,操作人机交互装置70的输入装置使处理器20激活探头10,探头10开始发射超声波并接收超声回波,用户将探头10沿着跟腱的一端移动到另一端,可采用匀速移动,有利于后续的匹配;探头10移动期间,处理器20实时对超声回波数据进行处理,生成实时的超声图像并通过人机交互装置70的显示器显示;探头10移动到跟腱另一端后,用户操作输入装置使处理器20冻结图像。激活探头10到冻结图像的过程为一次扫图。本例中的扫图手法一次扫图就覆盖了整个跟腱,是连续扫图,得到的超声影像数据在时间上是连续的。这段连续的超声影像数据为连续扫图期间(探头从跟腱一端移动到另一端期间)超声回波经过波束合成处理之后的数据,例如可以是一段射频数据,也可以是一段IQ数据对,还可以是一段超声视频,本实施例以后者为例进行说明,即本实施例中连续扫图得到一段超声视频,其包括连续多帧超声图像。采用本扫图手法,兽医在一侧马腿,用探头沿着跟腱从头到尾匀速的进行一次扫图,处理器20识别、计算、保存整条跟腱的超声影像数据(如第一超声影像数据)。One scanning technique is to move the probe along one end of the Achilles tendon to the other for continuous scanning. For example, the user places the probe against one end of the Achilles tendon, operates the input device of the human-
另一种扫图手法是:探头按预设顺序(如从上到下或从下到上等)分别对多个预设跟腱位置进行扫图。例举的上一扫图手法是连续扫图,本例扫图手法则是多点扫图或者说是多次扫图。例如,多个预设跟腱位置包括跟腱的两个端部,用户将探头贴着跟腱的一端,操作人机交互装置70的输入装置使处理器20激活探头10,探头10开始发射超声波并接收超声回波,得到跟腱端部的超声影像数据,用户操作输入装置使处理器20冻结图像。之后将探头10移动到下一跟腱位置(如探头下移2cm或上移2cm),继续激活探头10,得到该跟腱位置的超声影像数据后冻结图像。后续的跟腱位置的扫图以此类推,直到所有预设跟腱位置都完成扫图,所有预设跟腱位置的超声影像数据就构成了第三超声影像数据或第四超声影像数据。同样的,本例中,超声影像数据的类型可以是射频数据,也可以是IQ数据对,还可以是超声图像,本例以后者为例进行说明,即本例中的超声影像数据包括各个预设跟腱位置的超声图像。每对一个预设跟腱位置进行扫图,处理器20都根据超声回波生成超声图像并通过显示器显示。采用本扫图手法,兽医在一侧马腿,用探头沿着跟腱从头到尾分别对多个预设跟腱位置进行扫图,处理器20识别、计算、保存各个跟腱位置的超声影像数据(如得到第三超声影像数据)。Another scanning technique is: the probe scans a plurality of preset Achilles tendon positions in a preset sequence (such as from top to bottom or from bottom to top, etc.). The last scanning method in the example is continuous scanning, and the scanning method in this example is multi-point scanning or multiple scanning. For example, a plurality of preset Achilles tendon positions include two ends of the Achilles tendon, the user attaches the probe to one end of the Achilles tendon, operates the input device of the human-
具体过程同上述实施例的步骤1,在此不做赘述。The specific process is the same as that of
步骤7、处理器20将第三超声影像数据与第四超声影像数据进行匹配,匹配出多个位置的超声图像组;其中,一个位置的超声图像组包括:该位置当前跟腱的横切面超声图像,以及该位置健康时跟腱的横切面超声图像。Step 7: The
下面例举几种匹配方法进行说明。The following examples illustrate several matching methods.
第一种匹配方法,本匹配方法跟上一步骤的扫图手法具有关联性,即,要求预设的扫图手法为:探头10沿着跟腱的一端匀速移动到另一端进行连续扫图。本匹配方法包括如下步骤:The first matching method is related to the scanning technique in the previous step, that is, the required preset scanning technique is: the
处理器20根据第三超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置。处理器20根据第四超声影像数据中多个超声图像的时间顺序确定所述多个超声图像对应的跟腱的位置。由于跟腱两端部的超声图像(最先得到的超声图像和最后得到的超声图像)是已知的,且探头10在连续扫图时是匀速移动的,因此,超声影像数据的各个超声图像的时间与跟腱位置是一一对应的,处理器20可以在生成超声图像时关联上时间,也可以以帧数来对应时间,以后者为例,假设超声影像数据总计有1000帧超声图像,这1000帧图像的帧数按生成时间排序,则第500帧超声图像对应的跟腱位置就是跟腱的中部,第333帧超声图像对应的是跟腱的1/3位置处。对这1000帧图像的帧数等分也就是对跟腱进行等分,因此能得到各个超声图像对应的跟腱位置。The
处理器20将第三超声影像数据与第四超声影像数据中同一位置的超声图像进行匹配,得到超声图像组。例如,处理器20在第三超声影像数据中采用预设采样方式(如等分采样)依次采样,得到多个超声图像,在第四超声影像数据中同样采用预设采样方式依次采样,得到多个超声图像;将第三超声影像数据依次采样得到的多个超声图像与第四超声影像数据依次采样得到的多个超声图像一一匹配,得到多个位置的超声图像组。The
第二种匹配方法需要借助其他装置,例如,在探头10上设置用于检测探头高度的传感器,如激光测距传感器等。第三超声影像数据由探头10分别在多个预设的探头高度的触发下,扫查马的患腿跟腱得到;第四超声影像数据由探头10分别在多个预设的探头高度的触发下,在患腿健康时扫查其跟腱得到。换而言之,步骤6的扫图可由传感器来触发,兽医手持探头沿着跟腱的一端移动到另一端,期间传感器检测探头高度,在处于一个预设探头高度时,自动激活探头,之后可自动存图,得到该探头高度对应跟腱位置的超声图像。可见,兽医只需要将探头从跟腱一端移动到另一端即可,操作非常简单,自动化程度高,提高了效率。当然到预设探头高度后传感器也可以只提示兽医,由兽医手动操作来激活探头、存图等。The second matching method requires the help of other devices, for example, a sensor for detecting the height of the probe, such as a laser ranging sensor, is provided on the
对跟腱进行扫图,是对跟腱的横切面进行扫查进而得到超声图像。由于超声图像是已知探头高度触发采集的,因此超声影像数据中各个超声图像所属横切面的高度是已知的。进而,处理器20将第三超声影像数据与第四超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。Scanning the Achilles tendon is to scan the transverse section of the Achilles tendon to obtain an ultrasound image. Since the ultrasound images are acquired triggered by the known height of the probe, the heights of the cross-sections to which each ultrasound image in the ultrasound image data belongs is known. Further, the
第三种匹配方法同样需要借助其他装置,例如,在探头10上设置用于检测探头高度的传感器,如激光测距传感器等。本匹配方法包括如下步骤:The third matching method also requires the help of other devices, for example, a sensor for detecting the height of the probe, such as a laser ranging sensor, is provided on the
处理器20获取探头10在扫查患腿跟腱得到第三超声影像数据的过程中,探头上传感器检测的第一高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度;换而言之,处理器20根据超声回波数据生成一帧超声图像,将同一时刻传感器检测的高度关联到该帧超声图像,该帧超声图像关联的高度就是探头扫查得到该帧超声图像时所处的高度,也就是该帧超声图像所属跟腱横切面的高度。处理器20获取探头10在患腿健康时扫查其跟腱得到第四超声影像数据的过程中,探头上传感器检测的第二高度数据;将同一时刻下传感器采集的高度作为该时刻探头采集的超声图像所属横切面的高度。The
处理器20将第三超声影像数据与第四超声影像数据中同一高度的横切面的超声图像进行匹配,得到超声图像组。此种方式相较于第二种方式,数据处理量大一些。采用高度传感器确定超声图像对应的跟腱位置(高度),准确度更高。The
同样的,本步骤同上述实施例的步骤2,只需要把第一超声影像数据换成第三超声影像数据,把第二超声影像数据换成第四超声影像数据即可,在此不做赘述。Similarly, this step is the same as
同样的,步骤7之后,对超声图像组的处理方式可以有“自动”(见图7)和“手动”(见图8)两种方式。在“自动”方式中,步骤7之后还包括如下步骤:Similarly, after
步骤8、处理器20获取同一位置的超声图像组的两个超声图像中的跟腱区域。Step 8: The
处理器20可以自动识别同一位置的超声图像组的两个超声图像中的跟腱区域。例如,处理器20将同一位置的超声图像组的两个超声图像分别输入到预先训练好的深度学习模型或机器学习模型中,分别得到超声图像组的两个超声图像中的跟腱区域,当然,有些实施例中也可以采用图像识别技术来确定跟腱区域。The
处理器20也可以通过显示器显示同一位置的超声图像组,由兽医在超声图像组的超声图像上标记出跟腱区域。处理器20通过输入装置接收用户在同一位置的超声图像组的一个超声图像中标记的跟腱区域,将其确定为该超声图像的跟腱区域;同样的,通过输入装置接收用户在另一个超声图像中标记的跟腱区域,将其确定为该超声图像的跟腱区域。The
不论是处理器20自动识别出的跟腱区域还是用户手动标记的跟腱区域,还能对其进行进一步处理,便于后续差异量的计算。例如,如图6所示,处理器20取跟腱区域边界(图中虚线所示)上任意两点的线段中最长的一条为长轴a,以连接跟腱区域边界上两点并与长轴的垂线重合的线段为短轴b,将长轴a和短轴b确定的椭圆(图中实线所示)作为最终的跟腱区域。Whether it is the Achilles tendon region automatically identified by the
有些实施例中,不论是自动识别出的跟腱区域、还是用户手动标记的跟腱区域、还是进一步处理得到的椭圆跟腱区域(上述最终的跟腱区域),用户还可以对其进行调整。即,处理器在显示器显示的超声图像组中,标记出跟腱区域的边界,使用户可以对该边界进行调整。处理器20通过输入装置接收用户调整跟腱区域的边界的操作,根据该操作调整跟腱区域的边界并更新显示,后续步骤中用最新的跟腱区域进行计算。In some embodiments, whether it is the automatically identified Achilles tendon region, the Achilles tendon region manually marked by the user, or the elliptical Achilles tendon region obtained by further processing (the above-mentioned final Achilles tendon region), the user can also adjust it. That is, the processor marks the boundary of the Achilles tendon region in the ultrasound image group displayed on the display, so that the user can adjust the boundary. The
同样的,本步骤同上述步骤3,区别只在于:在显示超声图像组的两个超声图像时,处理器20标记的是超声图像的健康与否的属性(即标记超声图像是当前采集的还是健康时采集的),故在此不做赘述。Similarly, this step is the same as the above-mentioned
步骤9、处理器20根据同一位置的超声图像组中两个超声图像的跟腱区域,得到用于表征这两个跟腱区域尺寸差异的差异量并输出。Step 9: The
差异量可以包括两个跟腱区域面积的差值、两个跟腱区域面积的归一化差值、两个跟腱区域周长的差值和两个跟腱区域周长的归一化差值中的至少一个。若最新的跟腱区域为上述的椭圆跟腱区域,则处理器20根据椭圆的长短轴可计算跟腱区域面积、跟腱区域周长等,进而计算出上述差异量。若最新的跟腱区域不是标准的椭圆,则处理器20可统计跟腱区域内的像素总数,乘以每个像素代表的实际面积得到跟腱区域面积,可统计跟腱区域边界的像素总数,再乘以对应像素的长或宽得到跟腱区域周长,进而计算出上述差异量。当然,还可以先将两个跟腱区域叠加,得到差异区域,根据差异区域得到面积差值和/或周长差值。两个跟腱区域面积的归一化差值,其中的归一化方式可采用现有方式,如归一化差值为:两个跟腱区域面积差值的绝对值除以大的跟腱区域的面积,即两个跟腱区域面积的归一化差值为两个跟腱区域面积的狭窄比。同样的,两个跟腱区域周长的归一化差值,其中的归一化方式可采用现有方式,如归一化差值为:两个跟腱区域周长差值的绝对值除以大的跟腱区域的周长。The amount of difference can include the difference between the areas of the two Achilles tendon regions, the normalized difference between the areas of the two Achilles tendon regions, the difference in the perimeters of the two Achilles tendon regions, and the normalized difference in the perimeters of the two Achilles tendon regions at least one of the values. If the latest Achilles tendon region is the above-mentioned elliptical Achilles tendon region, the
处理器20输出差异量,例如通过显示器显示差异量。在显示差异量时,还可以显示对应的跟腱位置,上述步骤匹配了多个超声图像组,就显示对应的多个跟腱位置及其差异量,供兽医参考。例如,在显示器的显示界面上显示马腿示意图,在该示意图上标记出跟腱位置及其对应的差异量。不同的跟腱位置及其差异量同时显示或者分别显示皆可。The
处理器20还将上述多个跟腱位置及其差异量存储到存储器80中,提供相应显示界面供兽医后续查看。例如,兽医操作输入装置,发出用于查看历史差异量的指令。处理器20响应于用于查看历史差异量的指令,获取当前马匹同一跟腱位置不同时期得到的差异量;根据同一跟腱位置不同时期得到的差异量绘制出差异量曲线并输出,同样的,可以输出给显示器显示该差异量曲线。方便医生综合评估马跟腱的恢复情况。The
本步骤同上述步骤4,在此不做赘述。This step is the same as the above-mentioned
在“手动”方式中,步骤7之后还包括如下步骤:In the "manual" mode, the following steps are included after step 7:
步骤8’、处理器20输出同一位置的超声图像组。本步骤同上述步骤3’,在此不做赘述。Step 8', the
本文参照了各种示范实施例进行说明。然而,本领域的技术人员将认识到,在不脱离本文范围的情况下,可以对示范性实施例做出改变和修正。例如,各种操作步骤以及用于执行操作步骤的组件,可以根据特定的应用或考虑与系统的操作相关联的任何数量的成本函数以不同的方式实现(例如一个或多个步骤可以被删除、修改或结合到其他步骤中)。Descriptions are made herein with reference to various exemplary embodiments. However, those skilled in the art will recognize that changes and modifications may be made to the exemplary embodiments without departing from the scope of this document. For example, various operational steps, and components for performing operational steps, may be implemented in different ways depending on the particular application or considering any number of cost functions associated with the operation of the system (eg, one or more steps may be deleted, modified or incorporated into other steps).
另外,如本领域技术人员所理解的,本文的原理可以反映在计算机可读存储介质上的计算机程序产品中,该可读存储介质预装有计算机可读程序代码。任何有形的、非暂时性的计算机可读存储介质皆可被使用,包括磁存储设备(硬盘、软盘等)、光学存储设备(CD-ROM、DVD、Blu Ray盘等)、闪存和/或诸如此类。这些计算机程序指令可被加载到通用计算机、专用计算机或其他可编程数据处理设备上以形成机器,使得这些在计算机上或其他可编程数据处理装置上执行的指令可以生成实现指定的功能的装置。这些计算机程序指令也可以存储在计算机可读存储器中,该计算机可读存储器可以指示计算机或其他可编程数据处理设备以特定的方式运行,这样存储在计算机可读存储器中的指令就可以形成一件制造品,包括实现指定功能的实现装置。计算机程序指令也可以加载到计算机或其他可编程数据处理设备上,从而在计算机或其他可编程设备上执行一系列操作步骤以产生一个计算机实现的进程,使得在计算机或其他可编程设备上执行的指令可以提供用于实现指定功能的步骤。Additionally, as understood by those skilled in the art, the principles herein may be reflected in a computer program product on a computer-readable storage medium preloaded with computer-readable program code. Any tangible, non-transitory computer-readable storage medium may be used, including magnetic storage devices (hard disks, floppy disks, etc.), optical storage devices (CD-ROMs, DVDs, Blu Ray disks, etc.), flash memory, and/or the like . These computer program instructions may be loaded on a general purpose computer, special purpose computer or other programmable data processing apparatus to form a machine such that execution of the instructions on the computer or other programmable data processing apparatus may generate means for implementing the specified functions. These computer program instructions may also be stored in a computer-readable memory that instructs a computer or other programmable data processing device to operate in a particular manner, such that the instructions stored in the computer-readable memory form a piece of Articles of manufacture, including implementing means for implementing specified functions. Computer program instructions may also be loaded on a computer or other programmable data processing device to perform a series of operational steps on the computer or other programmable device to produce a computer-implemented process such that a process executed on the computer or other programmable device Instructions may provide steps for implementing specified functions.
虽然在各种实施例中已经示出了本文的原理,但是许多特别适用于特定环境和操作要求的结构、布置、比例、元件、材料和部件的修改可以在不脱离本披露的原则和范围内使用。以上修改和其他改变或修正将被包含在本文的范围之内。Although the principles herein have been shown in various embodiments, many modifications may be made in structure, arrangement, proportions, elements, materials and components as are particularly suited to particular environmental and operating requirements without departing from the principles and scope of the present disclosure use. The above modifications and other changes or corrections are intended to be included within the scope of this document.
前述具体说明已参照各种实施例进行了描述。然而,本领域技术人员将认识到,可以在不脱离本披露的范围的情况下进行各种修正和改变。因此,对于本披露的考虑将是说明性的而非限制性的意义上的,并且所有这些修改都将被包含在其范围内。同样,有关于各种实施例的优点、其他优点和问题的解决方案已如上所述。然而,益处、优点、问题的解决方案以及任何能产生这些的要素,或使其变得更明确的解决方案都不应被解释为关键的、必需的或必要的。本文中所用的术语“包括”和其任何其他变体,皆属于非排他性包含,这样包括要素列表的过程、方法、文章或设备不仅包括这些要素,还包括未明确列出的或不属于该过程、方法、系统、文章或设备的其他要素。此外,本文中所使用的术语“耦合”和其任何其他变体都是指物理连接、电连接、磁连接、光连接、通信连接、功能连接和/或任何其他连接。The foregoing Detailed Description has been described with reference to various embodiments. However, those skilled in the art will recognize that various modifications and changes can be made without departing from the scope of the present disclosure. Accordingly, this disclosure is to be considered in an illustrative rather than a restrictive sense, and all such modifications are intended to be included within its scope. Likewise, the advantages, other advantages, and solutions to problems of the various embodiments have been described above. However, the benefits, advantages, solutions to the problems, and any elements that give rise to them, or make them more explicit, should not be construed as critical, necessary, or essential. As used herein, the term "comprising" and any other variations thereof are non-exclusive inclusion, such that a process, method, article or device including a list of elements includes not only those elements, but also not expressly listed or included in the process , method, system, article or other elements of a device. Furthermore, as used herein, the term "coupled" and any other variations thereof refer to physical connections, electrical connections, magnetic connections, optical connections, communication connections, functional connections, and/or any other connection.
具有本领域技术的人将认识到,在不脱离本发明的基本原理的情况下,可以对上述实施例的细节进行许多改变。因此,本发明的范围应根据以下权利要求确定。Those skilled in the art will recognize that many changes may be made to the details of the above-described embodiments without departing from the underlying principles of the invention. Accordingly, the scope of the invention should be determined in accordance with the following claims.
Claims (23)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210828420.3ACN115153631A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111289632.0ACN113712597A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
| CN202210828420.3ACN115153631A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111289632.0ADivisionCN113712597A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115153631Atrue CN115153631A (en) | 2022-10-11 |
Family
ID=78686478
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210828420.3APendingCN115153631A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
| CN202111289632.0APendingCN113712597A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111289632.0APendingCN113712597A (en) | 2021-11-02 | 2021-11-02 | Method for inspecting Achilles tendon and ultrasonic imaging equipment |
Country Status (1)
| Country | Link |
|---|---|
| CN (2) | CN115153631A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023078269A1 (en)* | 2021-11-02 | 2023-05-11 | 深圳迈瑞动物医疗科技股份有限公司 | Achilles tendon examination method and ultrasonic imaging device |
| WO2024145750A1 (en)* | 2023-01-03 | 2024-07-11 | 深圳迈瑞动物医疗科技股份有限公司 | Method for evaluating rehabilitation condition of achilles tendon and ultrasonic imaging device |
Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101377787A (en)* | 2007-08-28 | 2009-03-04 | 株式会社理光 | Image searching device, image searching method, image searching program, and recording medium recording the image searching program |
| CN101511274A (en)* | 2006-09-22 | 2009-08-19 | 阿洛卡株式会社 | Ultrasonic breast diagnostic system |
| CN103690192A (en)* | 2013-12-11 | 2014-04-02 | 中国科学院深圳先进技术研究院 | Ultrasonic image-based chorda magna morphological analysis system and method |
| CN104527721A (en)* | 2014-12-18 | 2015-04-22 | 成都铁安科技有限责任公司 | Train fault detecting method and system |
| CN104574329A (en)* | 2013-10-09 | 2015-04-29 | 深圳迈瑞生物医疗电子股份有限公司 | Ultrasonic fusion imaging method and ultrasonic fusion imaging navigation system |
| US20150327805A1 (en)* | 2013-01-24 | 2015-11-19 | Tylerton International Holdings Inc. | Body structure imaging |
| US20160166735A1 (en)* | 2013-03-15 | 2016-06-16 | The Board Of Trustees Of The Leland Stanford Junior University | Injectable composition for in-situ repair and regeneration of an injured ligament or tendon and methods of use |
| CN106373089A (en)* | 2016-08-30 | 2017-02-01 | 上海大学 | B-type and elastic double-mode ultrasonic tendo calcaneus image splicing method |
| US20170055836A1 (en)* | 2015-08-28 | 2017-03-02 | Wisconsin Alumni Research Foundation | Apparatus for Dynamic Stress Measurement |
| US20170065249A1 (en)* | 2015-09-08 | 2017-03-09 | Advanced Tactile Imaging Inc. | Methods and probes for vaginal tactile and ultrasound imaging |
| CN107928707A (en)* | 2017-12-07 | 2018-04-20 | 苏州掌声医疗科技有限公司 | A kind of area method for fast measuring and system suitable for portable ultrasonic device |
| CN108573490A (en)* | 2018-04-25 | 2018-09-25 | 王成彦 | A kind of intelligent read tablet system for tumor imaging data |
| CN108875646A (en)* | 2018-06-22 | 2018-11-23 | 苏州市启献智能科技有限公司 | A kind of real face image and identity card registration is dual compares authentication method and system |
| CN109069100A (en)* | 2016-11-09 | 2018-12-21 | 深圳市理邦精密仪器股份有限公司 | Ultrasonic image-forming system and its method |
| CN209154436U (en)* | 2018-05-10 | 2019-07-26 | 均威科技(深圳)有限公司 | Massager band |
| CN110111354A (en)* | 2019-03-28 | 2019-08-09 | 青岛大学附属医院 | Liver medical image arteriosomes dividing method and system |
| CN110163904A (en)* | 2018-09-11 | 2019-08-23 | 腾讯大地通途(北京)科技有限公司 | Object marking method, control method for movement, device, equipment and storage medium |
| CN112634191A (en)* | 2019-09-24 | 2021-04-09 | 深圳迈瑞生物医疗电子股份有限公司 | Medical image analysis method, ultrasonic imaging apparatus, and computer storage medium |
| CN113180734A (en)* | 2018-12-27 | 2021-07-30 | 深圳迈瑞生物医疗电子股份有限公司 | Ultrasonic blood flow imaging method and system |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2830936B1 (en)* | 2001-10-16 | 2004-08-27 | Agronomique Inst Nat Rech | METHOD FOR MEASURING THE STATE OF TENSION OF A MATERIAL AND APPLICATIONS OF THIS METHOD |
| WO2015161297A1 (en)* | 2014-04-17 | 2015-10-22 | The Johns Hopkins University | Robot assisted ultrasound system |
| CN105999311B (en)* | 2016-05-16 | 2019-12-06 | 北京大学深圳医院 | targeted developer for diagnosing achilles tendonitis and preparation method thereof |
| CN107961038B (en)* | 2017-12-12 | 2020-04-14 | 深圳先进技术研究院 | A method and device for obtaining biomechanical parameters according to ultrasonic elastic myography |
| CN112545562A (en)* | 2019-09-26 | 2021-03-26 | 深圳市易特科信息技术有限公司 | Multimodal multiparameter breast cancer screening system, device and computer storage medium |
- 2021
- 2021-11-02CNCN202210828420.3Apatent/CN115153631A/enactivePending
- 2021-11-02CNCN202111289632.0Apatent/CN113712597A/enactivePending
Patent Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101511274A (en)* | 2006-09-22 | 2009-08-19 | 阿洛卡株式会社 | Ultrasonic breast diagnostic system |
| CN101377787A (en)* | 2007-08-28 | 2009-03-04 | 株式会社理光 | Image searching device, image searching method, image searching program, and recording medium recording the image searching program |
| US20150327805A1 (en)* | 2013-01-24 | 2015-11-19 | Tylerton International Holdings Inc. | Body structure imaging |
| US20160166735A1 (en)* | 2013-03-15 | 2016-06-16 | The Board Of Trustees Of The Leland Stanford Junior University | Injectable composition for in-situ repair and regeneration of an injured ligament or tendon and methods of use |
| CN104574329A (en)* | 2013-10-09 | 2015-04-29 | 深圳迈瑞生物医疗电子股份有限公司 | Ultrasonic fusion imaging method and ultrasonic fusion imaging navigation system |
| CN103690192A (en)* | 2013-12-11 | 2014-04-02 | 中国科学院深圳先进技术研究院 | Ultrasonic image-based chorda magna morphological analysis system and method |
| CN104527721A (en)* | 2014-12-18 | 2015-04-22 | 成都铁安科技有限责任公司 | Train fault detecting method and system |
| US20170055836A1 (en)* | 2015-08-28 | 2017-03-02 | Wisconsin Alumni Research Foundation | Apparatus for Dynamic Stress Measurement |
| US20170065249A1 (en)* | 2015-09-08 | 2017-03-09 | Advanced Tactile Imaging Inc. | Methods and probes for vaginal tactile and ultrasound imaging |
| CN106373089A (en)* | 2016-08-30 | 2017-02-01 | 上海大学 | B-type and elastic double-mode ultrasonic tendo calcaneus image splicing method |
| CN109069100A (en)* | 2016-11-09 | 2018-12-21 | 深圳市理邦精密仪器股份有限公司 | Ultrasonic image-forming system and its method |
| CN107928707A (en)* | 2017-12-07 | 2018-04-20 | 苏州掌声医疗科技有限公司 | A kind of area method for fast measuring and system suitable for portable ultrasonic device |
| CN108573490A (en)* | 2018-04-25 | 2018-09-25 | 王成彦 | A kind of intelligent read tablet system for tumor imaging data |
| CN209154436U (en)* | 2018-05-10 | 2019-07-26 | 均威科技(深圳)有限公司 | Massager band |
| CN108875646A (en)* | 2018-06-22 | 2018-11-23 | 苏州市启献智能科技有限公司 | A kind of real face image and identity card registration is dual compares authentication method and system |
| CN110163904A (en)* | 2018-09-11 | 2019-08-23 | 腾讯大地通途(北京)科技有限公司 | Object marking method, control method for movement, device, equipment and storage medium |
| CN113180734A (en)* | 2018-12-27 | 2021-07-30 | 深圳迈瑞生物医疗电子股份有限公司 | Ultrasonic blood flow imaging method and system |
| CN110111354A (en)* | 2019-03-28 | 2019-08-09 | 青岛大学附属医院 | Liver medical image arteriosomes dividing method and system |
| CN112634191A (en)* | 2019-09-24 | 2021-04-09 | 深圳迈瑞生物医疗电子股份有限公司 | Medical image analysis method, ultrasonic imaging apparatus, and computer storage medium |
Non-Patent Citations (2)
| Title |
|---|
| 付筱童: "高频超声在跟腱损伤诊断及术后康复中的应用价值分析", 《中国现代药物应用》, vol. 14, no. 16, 31 August 2020 (2020-08-31), pages 90 - 91* |
| 陈建;张卫兵;颜朝晖;刘华;李春伶;: "高频超声观察新兵训练对跟腱的影响", 中国医学影像技术, no. 01, 31 December 2014 (2014-12-31), pages 107 - 110* |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023078269A1 (en)* | 2021-11-02 | 2023-05-11 | 深圳迈瑞动物医疗科技股份有限公司 | Achilles tendon examination method and ultrasonic imaging device |
| WO2024145750A1 (en)* | 2023-01-03 | 2024-07-11 | 深圳迈瑞动物医疗科技股份有限公司 | Method for evaluating rehabilitation condition of achilles tendon and ultrasonic imaging device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113712597A (en) | 2021-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11931201B2 (en) | Device and method for obtaining anatomical measurements from an ultrasound image | |
| US20150164482A1 (en) | Ultrasound diagnostic apparatus, ultrasound image recording method, and non-transitory computer readable recording medium | |
| US10736608B2 (en) | Ultrasound diagnostic device and ultrasound image processing method | |
| WO2013105197A1 (en) | Ultrasonic diagnosis device, and blood vessel detection method | |
| CN111513754A (en) | Ultrasonic imaging equipment and quality evaluation method of ultrasonic image | |
| JP2017023347A (en) | Ultrasonic image processing apparatus and program | |
| CN111629670A (en) | Echo Window Artifact Classification and Visual Indicators for Ultrasound Systems | |
| CN115153631A (en) | Method for inspecting Achilles tendon and ultrasonic imaging equipment | |
| WO2016190256A1 (en) | Ultrasound diagnostic device and image processing method | |
| KR101627319B1 (en) | medical image processor and method thereof for medical diagnosis | |
| CN115886878A (en) | Elasticity measuring method and ultrasonic imaging apparatus | |
| CN113576529B (en) | Ultrasonic imaging device and code scanning operation method thereof | |
| CN114025672B (en) | Ultrasonic imaging device and method for detecting endometrial peristalsis | |
| WO2020041974A1 (en) | Ultrasound image processing method and equipment, and storage medium | |
| WO2020037673A1 (en) | Ultrasound elastography device and elastic image processing method | |
| CN112168210B (en) | Medical image processing terminal, ultrasonic diagnostic apparatus, and fetal image processing method | |
| CN114557724A (en) | Ultrasonic imaging apparatus and parameter measurement method | |
| US20230274430A1 (en) | Information processing apparatus, information processing method, and program | |
| CN115299986B (en) | Ultrasonic imaging device and ultrasonic inspection method thereof | |
| WO2021003711A1 (en) | Ultrasonic imaging apparatus and method and device for detecting b-lines, and storage medium | |
| CN116138807A (en) | Ultrasonic imaging equipment and ultrasonic detection method of abdominal aorta | |
| WO2023077267A1 (en) | Achilles tendon examination method and ultrasound imaging device | |
| CN113197596B (en) | Ultrasonic imaging equipment and processing method of ultrasonic echo data thereof | |
| CN113951922A (en) | Ultrasound imaging equipment and scanning prompting method thereof | |
| CN117557591A (en) | A contour editing method and ultrasound imaging system based on ultrasound images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |