CN115017222B - Information processing system and method based on multiple information sources - Google Patents
Information processing system and method based on multiple information sourcesDownload PDFInfo
- Publication number
- CN115017222B CN115017222BCN202210913280.XACN202210913280ACN115017222BCN 115017222 BCN115017222 BCN 115017222BCN 202210913280 ACN202210913280 ACN 202210913280ACN 115017222 BCN115017222 BCN 115017222B
- Authority
- CN
- China
- Prior art keywords
- information
- processing unit
- reference time
- data
- processor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/25—Integrating or interfacing systems involving database management systems
- G06F16/252—Integrating or interfacing systems involving database management systems between a Database Management System and a front-end application
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/24—Querying
- G06F16/245—Query processing
- G06F16/2458—Special types of queries, e.g. statistical queries, fuzzy queries or distributed queries
- G06F16/2477—Temporal data queries
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Databases & Information Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Business, Economics & Management (AREA)
- Remote Sensing (AREA)
- Human Resources & Organizations (AREA)
- Software Systems (AREA)
- Probability & Statistics with Applications (AREA)
- Mathematical Physics (AREA)
- Fuzzy Systems (AREA)
- Health & Medical Sciences (AREA)
- Economics (AREA)
- General Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Marketing (AREA)
- Primary Health Care (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本公开涉及信息处理技术领域,尤其涉及一种基于多信息源的信息处理系统及方法。The present disclosure relates to the technical field of information processing, and in particular to an information processing system and method based on multiple information sources.
背景技术Background technique
在自动驾驶领域,为了更好的感知环境,获取车辆附近的精确三维模型以及行驶轨迹,通常需要多种检测装置进行检测,并将检测结果进行结合,综合确定车辆所在区域的环境信息。In the field of autonomous driving, in order to better perceive the environment and obtain accurate 3D models and driving trajectories near the vehicle, multiple detection devices are usually required for detection, and the detection results are combined to comprehensively determine the environmental information of the area where the vehicle is located.
发明内容Contents of the invention
为了解决上述技术问题,本公开提供了一种基于多信息源的信息处理系统及方法。In order to solve the above technical problems, the present disclosure provides an information processing system and method based on multiple information sources.
本公开的第一方面,提供一种基于多信息源的信息处理系统,所述基于多信息源的信息处理系统包括:In a first aspect of the present disclosure, an information processing system based on multiple information sources is provided, and the information processing system based on multiple information sources includes:
多个信息源;Multiple sources of information;
第一处理器,所述第一处理器包括第一处理单元以及与所述第一处理单元连接的第一通信接口和多个信息源接口,所述多个信息源接口分别与多个信息源连接;A first processor, the first processor includes a first processing unit, a first communication interface connected to the first processing unit, and a plurality of information source interfaces, and the plurality of information source interfaces are respectively connected to a plurality of information sources connect;
第二处理器,所述第二处理器包括第二处理单元以及与所述第二处理单元连接的第二通信接口和至少一个数据接口,所述至少一个数据接口与所述多个信息源中的至少部分信息源连接,所述第一通信接口与所述第二通信接口通信连接;A second processor, the second processor includes a second processing unit, a second communication interface connected to the second processing unit, and at least one data interface, the at least one data interface is connected to the plurality of information sources at least part of the information source connection, the first communication interface is communicatively connected with the second communication interface;
其中,所述第一处理单元中设置有基准时间信息,各所述信息源的数据信息通过所述第一处理单元或者通过所述数据接口发送至所述第二处理单元,且各所述数据信息均与所述基准时间信息进行绑定。Wherein, the first processing unit is provided with reference time information, the data information of each of the information sources is sent to the second processing unit through the first processing unit or through the data interface, and each of the data The information is bound with the reference time information.
本公开一些实施例中,所述多个信息源包括第一信息源,所述多个信息源接口包括与所述第一信息源连接的第一信息源接口,所述至少一个数据接口包括与所述第一信息源连接的第一数据接口,所述第一信息源用于响应于所述第一处理单元经所述第一信息源接口发送的第一触发信号,通过所述第一数据接口向所述第二处理单元发送第一数据信息,所述第一处理单元用于将发送所述第一触发信号时的第一基准时间信息发送至所述第二处理单元,所述第二处理单元用于将所述第一数据信息与所述第一基准时间信息绑定。In some embodiments of the present disclosure, the multiple information sources include a first information source, the multiple information source interfaces include a first information source interface connected to the first information source, and the at least one data interface includes a The first data interface connected to the first information source, the first information source is used to pass the first data in response to the first trigger signal sent by the first processing unit through the first information source interface The interface sends the first data information to the second processing unit, the first processing unit is configured to send the first reference time information when the first trigger signal is sent to the second processing unit, and the second The processing unit is configured to bind the first data information with the first reference time information.
本公开一些实施例中,所述多个信息源包括第二信息源,所述多个信息源接口包括与所述第二信息源连接的第二信息源接口,所述第二信息源用于响应于所述第一处理单元经所述第二信息源接口发送的第二触发信号,通过所述第二信息源接口向所述第一处理单元发送第二数据信息,所述第一处理单元用于将发送所述第二触发信号时的第二基准时间信息与所述第二数据信息绑定后发送至所述第二处理单元。In some embodiments of the present disclosure, the multiple information sources include a second information source, the multiple information source interfaces include a second information source interface connected to the second information source, and the second information source is used for In response to the second trigger signal sent by the first processing unit through the second information source interface, sending second data information to the first processing unit through the second information source interface, the first processing unit It is used for binding the second reference time information when the second trigger signal is sent with the second data information and sending it to the second processing unit.
本公开一些实施例中,所述多个信息源包括第三信息源,所述多个信息源接口包括与所述第三信息源连接的第三信息源接口,所述第一处理单元用于通过所述第三信息源接口获取所述第三信息源的第三数据信息,并将获取所述第三数据信息时的第三基准时间信息与所述第三数据信息绑定后发送至所述第二处理单元。In some embodiments of the present disclosure, the multiple information sources include a third information source, the multiple information source interfaces include a third information source interface connected to the third information source, and the first processing unit is used to Obtain the third data information of the third information source through the third information source interface, bind the third reference time information when obtaining the third data information with the third data information, and send it to the said third information source. Describe the second processing unit.
本公开一些实施例中,所述多个信息源包括第四信息源,所述多个信息源接口包括与所述第四信息源连接的第四信息源接口,所述至少一个数据接口包括与所述第四信息源连接的第二数据接口,所述第一处理单元用于通过所述第四信息源接口向所述第四信息源发送第四基准时间信息,所述第四信息源用于将第四数据信息与所述第四基准时间信息绑定后经所述第二数据接口发送至所述第二处理单元。In some embodiments of the present disclosure, the multiple information sources include a fourth information source, the multiple information source interfaces include a fourth information source interface connected to the fourth information source, and the at least one data interface includes a fourth information source interface connected to the fourth information source. The second data interface connected to the fourth information source, the first processing unit is configured to send fourth reference time information to the fourth information source through the fourth information source interface, and the fourth information source uses and sending the fourth data information to the second processing unit via the second data interface after binding the fourth data information with the fourth reference time information.
本公开一些实施例中,所述第一处理器包括基准时间输入接口,用于连接基准时间传输系统,所述第一处理单元与所述基准时间输入接口连接,用于根据所述基准时间输入接口接收的信息对所述基准时间信息进行修正。In some embodiments of the present disclosure, the first processor includes a reference time input interface for connecting to a reference time transmission system, and the first processing unit is connected to the reference time input interface for inputting The information received by the interface modifies the reference time information.
本公开一些实施例中,所述第一处理器还包括第三通信接口,所述第二处理器还包括第四通信接口,所述第一处理单元用于通过所述第三通信接口向所述第二处理单元发送脉冲信号,以触发所述第二处理单元对内置时间进行更正。In some embodiments of the present disclosure, the first processor further includes a third communication interface, the second processor further includes a fourth communication interface, and the first processing unit is configured to communicate to the The second processing unit sends a pulse signal to trigger the second processing unit to correct the built-in time.
本公开的第二方面,提供了一种基于多信息源的信息处理方法,应用于第一处理器,所述第一处理器与多个信息源连接并与第二处理器连接,所述基于多信息源的信息处理方法包括:The second aspect of the present disclosure provides an information processing method based on multiple information sources, which is applied to a first processor, and the first processor is connected to multiple information sources and connected to a second processor. Information processing methods for multiple information sources include:
向所述信息源发送第一触发信号,所述第一触发信号用于触发所述信息源向所述第二处理器发送第一数据信息;sending a first trigger signal to the information source, where the first trigger signal is used to trigger the information source to send first data information to the second processor;
将发送所述第一触发信号时的第一基准时间信息发送至所述第二处理器,以使得所述第二处理器将所述第一数据信息与所述第一基准时间信息绑定;sending the first reference time information when the first trigger signal is sent to the second processor, so that the second processor binds the first data information with the first reference time information;
或者,or,
向所述信息源发送第二触发信号,所述第二触发信号用于触发所述信息源向所述第一处理器发送第二数据信息;sending a second trigger signal to the information source, where the second trigger signal is used to trigger the information source to send second data information to the first processor;
接收所述第二数据信息;receiving the second data message;
将发送所述第二触发信号时的第二基准时间信息与所述第二数据信息绑定后发送至所述第二处理器;binding the second reference time information when the second trigger signal is sent to the second data information and sending it to the second processor;
或者,or,
向所述信息源获取第三数据信息;Obtain third data information from the information source;
将获取所述第三数据信息时的第三基准时间信息与所述第三数据信息绑定后发送至所述第二处理单元;binding the third reference time information when acquiring the third data information with the third data information and sending it to the second processing unit;
或者,or,
周期性地向所述信息源发送第四基准时间信息,以使得所述信息源以所述第四基准时间信息为时间基准向所述第二处理单元发送第四数据信息。Periodically sending fourth reference time information to the information source, so that the information source sends fourth data information to the second processing unit using the fourth reference time information as a time reference.
本公开的第三方面,提供了一种基于多信息源的信息处理方法,应用于第二处理器,所述第二处理器与至少一个信息源连接并与第一处理器连接,所述基于多信息源的信息处理方法包括:The third aspect of the present disclosure provides an information processing method based on multiple information sources, which is applied to a second processor, and the second processor is connected to at least one information source and connected to the first processor. Information processing methods for multiple information sources include:
接收所述信息源发送的第一数据信息;receiving the first data information sent by the information source;
接收所述第一处理器发送的第一基准时间信息;receiving first reference time information sent by the first processor;
将所述第一数据信息以及相对应的第一基准时间信息绑定。Binding the first data information and the corresponding first reference time information.
本公开一些实施例中,所述第二处理器与激光雷达连接,所述第一处理器连接有编码器,所述编码器位于所述激光雷达的驱动电机中,所述基于多信息源的信息处理方法包括:In some embodiments of the present disclosure, the second processor is connected to the laser radar, the first processor is connected to an encoder, and the encoder is located in the driving motor of the laser radar, and the multi-information source-based Information processing methods include:
接收所述激光雷达发送的第四数据信息和对应的第四基准时间信息;receiving fourth data information and corresponding fourth reference time information sent by the lidar;
接收所述第一处理器发送的所述编码器的第三数据信息和对应的第三基准时间信息;receiving third data information of the encoder and corresponding third reference time information sent by the first processor;
基于所述第四基准时间信息、所述第三数据信息以及所述第三基准时间信息,确定与所述第四基准时间信息对应的编码器数据信息;determining encoder data information corresponding to the fourth reference time information based on the fourth reference time information, the third data information, and the third reference time information;
基于所述第四数据信息和所述编码器数据信息,确定雷达数据信息。Radar data information is determined based on the fourth data information and the encoder data information.
本公开的基于多信息源的信息处理系统中,设置有第一处理器和第二处理器,第一处理器的第一处理单元中设置有基准时间信息,各信息源的数据信息均与第一处理单元所设置的基准时间信息进行绑定,并在第二处理器中进行数据处理,从而使得所有信息源的信息均统一以基准时间信息作为基准,保证各个信息源的信息的时间一致性。In the information processing system based on multiple information sources of the present disclosure, a first processor and a second processor are set, the first processing unit of the first processor is set with reference time information, and the data information of each information source is consistent with the first processor. The reference time information set by a processing unit is bound, and data processing is performed in the second processor, so that the information of all information sources is uniformly based on the reference time information, ensuring the time consistency of the information of each information source .
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本文。It is to be understood that both the foregoing general description and the following detailed description are exemplary and explanatory only and are not restrictive.
附图说明Description of drawings
构成本文的一部分的附图用来提供对本文的进一步理解,本文的示意性实施例及其说明用于解释本文,并不构成对本文的不当限定。在附图中:The accompanying drawings constituting a part of this document are used to provide a further understanding of this document, and the schematic embodiments and descriptions herein are used to explain this document and do not constitute an improper limitation to this document. In the attached picture:
图1是相关技术中检测装置的时钟对比示意图;Fig. 1 is a schematic diagram of a clock comparison of a detection device in the related art;
图2是相关技术中处理器接收检测装置数据的延时示意图;FIG. 2 is a schematic diagram of a delay in receiving data from a detection device by a processor in the related art;
图3是本公开一示例性实施例示出的基于多信息源的信息处理系统的结构示意图;Fig. 3 is a schematic structural diagram of an information processing system based on multiple information sources shown in an exemplary embodiment of the present disclosure;
图4是本公开另一示例性实施例示出的基于多信息源的信息处理系统的结构示意图;Fig. 4 is a schematic structural diagram of an information processing system based on multiple information sources according to another exemplary embodiment of the present disclosure;
图5是本公开第一实施例示出的基于多信息源的信息处理方法流程图;Fig. 5 is a flowchart of an information processing method based on multiple information sources shown in the first embodiment of the present disclosure;
图6是本公开第二实施例示出的基于多信息源的信息处理方法流程图;FIG. 6 is a flowchart of an information processing method based on multiple information sources shown in the second embodiment of the present disclosure;
图7是本公开第三实施例示出的基于多信息源的信息处理方法流程图;Fig. 7 is a flowchart of an information processing method based on multiple information sources according to the third embodiment of the present disclosure;
图8是本公开第五实施例示出的基于多信息源的信息处理方法流程图;Fig. 8 is a flowchart of an information processing method based on multiple information sources shown in the fifth embodiment of the present disclosure;
图9是本公开第六实施例示出的基于多信息源的信息处理方法流程图。Fig. 9 is a flowchart of an information processing method based on multiple information sources according to the sixth embodiment of the present disclosure.
图中:In the picture:
100、信息源;110、第一信息源;120、第二信息源;130、第三信息源;140、第四信息源;100. Information source; 110. First information source; 120. Second information source; 130. Third information source; 140. Fourth information source;
200、第一处理器;210、第一处理单元;220、第一通信接口;230、信息源接口;231、第一信息源接口;232、第二信息源接口;233、第三信息源接口;234、第四信息源接口;240、基准时间输入接口;250、第三通信接口;200. First processor; 210. First processing unit; 220. First communication interface; 230. Information source interface; 231. First information source interface; 232. Second information source interface; 233. Third information source interface ; 234, the fourth information source interface; 240, the reference time input interface; 250, the third communication interface;
300、第二处理器;310、第二处理单元;320、第二通信接口;330、数据接口;331、第一数据接口;332、第二数据接口;340、第四通信接口;300. A second processor; 310. A second processing unit; 320. A second communication interface; 330. A data interface; 331. A first data interface; 332. A second data interface; 340. A fourth communication interface;
400、基准时间传输系统。400. A reference time transmission system.
具体实施方式Detailed ways
为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互任意组合。In order to make the purpose, technical solutions and advantages of the embodiments of the present disclosure clearer, the technical solutions in the embodiments of the present disclosure will be clearly and completely described below in conjunction with the drawings in the embodiments of the present disclosure. Obviously, the described embodiments It is a part of the embodiments of the present disclosure, but not all of them. Based on the embodiments in the present disclosure, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present disclosure. It should be noted that, in the case of no conflict, the embodiments in the present disclosure and the features in the embodiments can be combined arbitrarily with each other.
相关技术中,各个检测装置均具有各自独立的时间系统,不同的检测装置之间的时间系统由于制造工艺的差距而存在不同,例如,图1示出卫星UTC(Universal TimeCoordinated,网络协调世界时)时钟、雷达时钟以及相机时钟的对比示意图。另外,检测装置往往是通过通信协议传输至处理器中,对于一些处理图形图像等大规模数据的处理器,一般装有非实时操作系统(例如Linux),由于系统调度的原因,导致处理器接收到检测装置的数据是存在延迟的,并且延迟是不确定的,如图2所示,检测装置时序和处理器时序两者会存在Δt的时间差,因此即便是检测装置之间时钟没有误差,也会因为传输延迟时间不确定而无法知道检测装置数据产生的真正时间。In related technologies, each detection device has its own independent time system, and the time systems of different detection devices are different due to the gap in manufacturing process. For example, Figure 1 shows satellite UTC (Universal Time Coordinated, network coordinated universal time) Schematic comparison of clock, radar clock, and camera clock. In addition, the detection device is often transmitted to the processor through a communication protocol. For some processors that process large-scale data such as graphics and images, a non-real-time operating system (such as Linux) is generally installed. Due to system scheduling, the processor receives There is a delay in the data to the detection device, and the delay is uncertain. As shown in Figure 2, there will be a time difference of Δt between the timing of the detection device and the timing of the processor, so even if there is no clock error between the detection devices, Because the transmission delay time is uncertain, it is impossible to know the real time when the detection device data is generated.
基于此,本公开提供了一种基于多信息源的信息处理系统,设置有第一处理器和第二处理器,第一处理器的第一处理单元中设置有基准时间信息,各信息源的数据信息均与第一处理单元所设置的基准时间信息进行绑定,并在第二处理器中进行数据处理,从而使得所有信息源的信息均统一以基准时间信息作为基准,保证各个信息源的信息的时间一致性。Based on this, the present disclosure provides an information processing system based on multiple information sources, which is provided with a first processor and a second processor, the first processing unit of the first processor is provided with reference time information, and the information of each information source The data information is bound with the reference time information set by the first processing unit, and data processing is performed in the second processor, so that the information of all information sources is uniformly based on the reference time information, ensuring the accuracy of each information source. Time consistency of information.
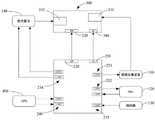
本公开一示例性实施例提供了一种基于多信息源的信息处理系统,如图3所示,该信息处理系统包括多个信息源100、第一处理器200和第二处理器300,其中,多个信息源100分别用于产生不同的信息,例如,多个信息源100为多个不同的检测装置,示例性地,多个信息源100包括图像采集装置、惯性测量装置、激光雷达、编码器等等。An exemplary embodiment of the present disclosure provides an information processing system based on multiple information sources. As shown in FIG. 3 , the information processing system includes
第一处理器200包括第一处理单元210以及与第一处理单元210连接的第一通信接口220和多个信息源接口230,多个信息源接口230分别与多个信息源100连接,第一处理单元210能够通过信息源接口230与对应的信息源100通信。第二处理器300包括第二处理单元310以及与第二处理单元310连接的第二通信接口320和至少一个数据接口330,至少一个数据接口330与多个信息源100中的至少部分信息源100连接,第一通信接口220与第二通信接口320通信连接。The
如此,各信息源100的数据信息能够通过第一处理单元210发送给第二处理单元310,例如,信息源100的数据信息通过信息源接口230发送给第一处理单元210,第一处理单元210将接收的数据信息经第一通信接口220、第二通信接口320发送至第二处理单元310。各信息源100的数据信息也可以通过数据接口330直接发送至第二处理单元310。In this way, the data information of each
其中,第一处理单元210中设置有基准时间信息,各数据信息均与基准时间信息进行绑定,如此,所有信息源100的信息均统一以基准时间信息作为基准,保证各个信息源100的信息的时间一致性。Wherein, the
第一处理器200为带有实时操作系统的处理器,例如可以采用MCU(Microcontroller Unit,微控制单元)或者FPGA(Field Programmable Gate Array,现场可编程门阵列),第二处理器300为带有非实时性操作系统(例如Linux)的处理器,具有较强的计算性能,用于处理大规模数据,例如可以用于处理图像数据、点云数据等。The
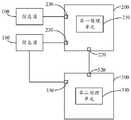
一实施例中,如图4所示,多个信息源100包括第一信息源110,多个信息源接口230包括与第一信息源110连接的第一信息源接口231,至少一个数据接口330包括与第一信息源110连接的第一数据接口331。第一信息源110用于响应于第一处理单元210经第一信息源接口231发送的第一触发信号,通过第一数据接口331向第二处理单元310发送第一数据信息,第一处理单元210用于将发送第一触发信号时的第一基准时间信息发送至第二处理单元310,第二处理单元310用于将第一数据信息与第一基准时间信息绑定。In one embodiment, as shown in FIG. 4 ,
本实施例中,第一信息源110产生的第一数据信息的数据量较大,可将第一信息源110的第一数据信息直接传输至第二处理器300进行处理,同时第一处理器200将发送第一触发信号时的第一基准时间信息发送至第二处理单元310,从而保证第一基准时间信息准确表征第一数据信息的采集时间。In this embodiment, the first data information generated by the
示例性地,如图4所示,第一信息源110为图像采集装置,第一数据信息为图像采集装置采集的图像信息,第一信息源接口231为GPIO(General Purpose Input/Output Port,通用输入输出)接口,第一处理单元210通过第一信息源接口231向图像采集装置发送第一触发信号以触发图像采集装置进行图像采集并将采集的图像信息经第一数据接口331发送给第二处理单元310。同时,第一处理单元210将发送第一触发信号时的第一基准时间信息经第一通信接口220、第二通信接口320发送至第二处理单元310,以便第二处理单元310进行信息与时间的绑定,并对绑定时间后的图像信息进行数据处理,例如,运行实时定位与建图(slam)算法。其中,第一通信接口220和第二通信接口320可以采用SPI(SerialPeripheral interface,串行外设接口)接口。Exemplarily, as shown in FIG. 4 , the
通常情况下,图像采集装置会连续进行多次图像采集,每次图像采集均对应一个图像采集时间,为了保证第二处理单元310能够准确地将每次图像采集的图像信息与采集时间一一绑定,在一个实施例中,第二处理单元310中设置有图像数量标志位Np和时间标志位Nt,第二处理单元310每收到一帧图像,均将图像数量标志位Np加1,且每收到一次第一基准时间信息,均将时间标志位Nt加1,如此,在进行绑定时,将图像数量标志位和时间标志位相同的图像信息与时间信息绑定,以保证图像信息与时间信息的一一对应关系。Usually, the image acquisition device will continuously perform multiple image acquisitions, and each image acquisition corresponds to an image acquisition time. In order to ensure that the
一实施例中,如图4所示,多个信息源包括第二信息源120,多个信息源接口230包括与第二信息源120连接的第二信息源接口232,第二信息源120用于响应于第一处理单元210经第二信息源接口232发送的第二触发信号,通过第二信息源接口232向第一处理单元210发送第二数据信息,第一处理单元210用于将发送第二触发信号时的第二基准时间信息与第二数据信息绑定后发送至第二处理单元310。In one embodiment, as shown in FIG. 4 , a plurality of information sources includes a
本实施例中,通过第一处理单元210将第二基准时间信息和第二数据信息绑定后发送给第二处理单元310,无需第二处理单元310再进行前述的信息与时间的匹配过程,简化了第二处理单元310的处理过程,提高第二处理单元310的处理效率。In this embodiment, the second reference time information and the second data information are bound by the
示例性地,如图4所示,第二信息源120为惯性测量单元,用于测量物体三轴姿态角(或角速度)以及加速度,第二信息源接口232包括一个GPIO接口以及一个UART(UniversalAsynchronous Receiver/Transmitter,通用异步收发传输器)接口,第一处理单元210通过GPIO接口向惯性测量单元发送第二触发信号,惯性测量单元通过UART接口向第二处理单元310回传IMU数据。第一处理单元210在接收到IMU数据后,将IMU数据与对应的时间信息绑定后,通过第一通信接口220、第二通信接口320发送至第二处理单元310。Exemplarily, as shown in FIG. 4 , the
一实施例中,如图4所示,多个信息源包括第三信息源130,多个信息源接口230包括与第三信息源130连接的第三信息源接口233,第一处理单元210用于通过第三信息源接口233获取第三信息源130的第三数据信息,并将获取第三数据信息时的第三基准时间信息与第三数据信息绑定后发送至第二处理单元310。In one embodiment, as shown in FIG. 4 , the multiple information sources include a
本实施例适于传输数据量小,传输时间可忽略的信息源,示例性地,如图4所示,第三信息源130为编码器。在大规模手持激光扫描领域,为了更好的获取环境三维模型,在使用激光雷达(后面有具体介绍)的同时,通常会使用多目视觉融合的方式防止雷达点云匹配失效,这种失效的情况常见于长直的隧道,平坦的路面。同时为了增加机械旋转激光雷达的视场角度,会使用带编码器的电机驱动激光雷达进行旋转。第三信息源接口233可以采用UART接口,第一处理单元210可通过UART接口向编码器获取编码器数据,并将编码器数据与时间信息绑定后发送给第二处理单元310。This embodiment is suitable for an information source with a small amount of transmitted data and negligible transmission time. Exemplarily, as shown in FIG. 4 , the
一实施例中,如图4所示,多个信息源包括第四信息源140,多个信息源接口230包括与第四信息源140连接的第四信息源接口234,至少一个数据接口330包括与第四信息源140连接的第二数据接口332,第一处理单元210用于通过第四信息源接口234向第四信息源140发送第四基准时间信息,第四信息源140用于将第四数据信息与第四基准时间信息绑定后经第二数据接口332发送至第二处理单元310。In one embodiment, as shown in FIG. 4 , multiple information sources include a
本实施例中,第一处理单元210将基准时间信息发送至第四信息源140,由第四信息源140进行数据信息与基准时间信息的绑定,从而进一步减小第一处理单元210的运算量。In this embodiment, the
示例性地,第四信息源140为激光雷达,第四数据信息为激光雷达采集的点云信息,第四信息源接口234可以采用UART接口,第一处理单元210通过UART接口向激光雷达发送第四基准时间信息。另外,第四信息源接口234还可以包括GPIO接口,第一处理单元210通过GPIO接口向激光雷达发送脉冲信号,例如发送PPS(pulse per second,秒脉冲)信号,以触发激光雷达对内置时间进行更正。示例性地,第一处理单元210在初始化后,会发送第一个PPS信号以及对应的基准时间信息,激光雷达收到第一个PPS信号以及基准时间信息后,更新激光雷达的初始时间。而后,第一处理单元210每隔1s(或者其它固定时间)发送一个脉冲信号给激光雷达,不再需要发送基准时间信息,激光雷达通过外部中断记录脉冲信号的时刻,并在该时刻将自己的系统时间自增1s。Exemplarily, the
设置于第一处理单元210中的基准时间信息可以进行修正,例如,在一个示例性实施例中,如图4所示,第一处理器200包括基准时间输入接口240,用于连接基准时间传输系统400,第一处理单元210与基准时间输入接口240连接,用于根据基准时间输入接口240接收的信息对基准时间信息进行修正,从而保证第一处理单元210中设置的基准时间信息的准确性。例如,基准时间输入接口240包括一个GPIO接口和一个UART接口,基准时间传输系统400可通过UART接口向第一处理单元210发送UTC时间。基准时间传输系统400可通过GPIO接口向第一处理单元210发送PPS信号。由于UTC时间信息的传输需要一定的时间,当第一处理单元210接收到该UTC时间时,与基准时间传输系统400发出的时间具有一定的时间差,为此,基准时间传输系统400在通过UART接口向第一处理单元210发送UTC时间时,同时通过GPIO接口向第一处理单元210发送PPS信号,由于PPS信号具有实时性,当第一处理单元210接收到PPS信号时,将接收到PPS信号的时间点确认为基准时间传输系统400发出UTC时间的时间点,当接收到UTC时间时,即将接收到的UTC时间与接收到PPS信号时的时间点对应,从而保证第一处理单元210的基准时间的准确性。基准时间传输系统400例如可以为GPS(Global Positioning System,全球定位系统)或者RTK(Real -time kinemaTIc,差分定位系统)。The reference time information set in the
本公开一示例性实施例中,如图4所示,第一处理器200还包括第三通信接口250,第二处理器300还包括第四通信接口340,第一处理单元210用于通过第三通信接口250向第二处理单元310发送脉冲信号,以触发第二处理单元310对内置时间进行更正。示例性地,第一处理单元210在初始化后,会发送第一个PPS信号以及对应的基准时间信息,第二处理单元310收到第一个PPS信号以及基准时间信息后,更新第二处理单元310的初始时间。而后,第一处理单元210每隔1s(或者其它固定时间)发送一个脉冲信号给第二处理单元310,不再需要发送基准时间信息,第二处理单元310通过外部中断记录脉冲信号的时刻,并在该时刻将自己的系统时间自增1s。In an exemplary embodiment of the present disclosure, as shown in FIG. 4 , the
本实施例中,当第二处理单元310接收到基准时间信息时,例如上述的第一基准时间信息、第二基准时间信息、第三基准时间信息、第四基准时间信息等,第二处理单元310将自身的系统时间与基准时间信息进行对比,当系统时间与基准时间信息的差值大于预设差值时,则判定与该基准时间信息绑定的数据信息无效,从而进一步保证第二处理单元310接收到的数据信息的时间准确性。In this embodiment, when the
本公开一示例性实施例还提供了一种基于多信息源的信息处理方法,应用于第一处理器,第一处理器例如为上述的基于多信息源的信息处理系统中的第一处理器,如图5所示,本公开第一实施例示出的基于多信息源的信息处理方法包括如下步骤:An exemplary embodiment of the present disclosure also provides an information processing method based on multiple information sources, which is applied to a first processor, for example, the first processor in the above-mentioned information processing system based on multiple information sources , as shown in FIG. 5 , the information processing method based on multiple information sources shown in the first embodiment of the present disclosure includes the following steps:
S100、向信息源发送第一触发信号,第一触发信号用于触发信息源向第二处理器发送第一数据信息。S100. Send a first trigger signal to an information source, where the first trigger signal is used to trigger the information source to send first data information to a second processor.
S200、将发送第一触发信号时的第一基准时间信息发送至第二处理器,以使得第二处理器将第一数据信息与第一基准时间信息绑定。S200. Send the first reference time information when the first trigger signal is sent to the second processor, so that the second processor binds the first data information with the first reference time information.
该方法适于前述的第一信息源,具体可参见前面的描述,在此不再赘述。This method is suitable for the foregoing first information source, and details may be referred to the foregoing description, which will not be repeated here.
如图6所示,本公开第二实施例示出的基于多信息源的信息处理方法包括如下步骤:As shown in FIG. 6, the information processing method based on multiple information sources shown in the second embodiment of the present disclosure includes the following steps:
S110、向信息源发送第二触发信号,第二触发信号用于触发信息源向第一处理器发送第二数据信息。S110. Send a second trigger signal to the information source, where the second trigger signal is used to trigger the information source to send second data information to the first processor.
S210、接收第二数据信息。S210. Receive second data information.
S310、将发送第二触发信号时的第二基准时间信息与第二数据信息绑定后发送至第二处理器。S310. Bind the second reference time information when the second trigger signal is sent with the second data information and send it to the second processor.
该方法适于前述的第二信息源,具体可参见前面的描述,在此不再赘述。This method is suitable for the foregoing second information source, and details may be referred to the foregoing description, which will not be repeated here.
如图7所示,本公开第三实施例示出的基于多信息源的信息处理方法包括如下步骤:As shown in FIG. 7 , the information processing method based on multiple information sources shown in the third embodiment of the present disclosure includes the following steps:
S101、向信息源获取第三数据信息。S101. Acquire third data information from an information source.
S201、将获取第三数据信息时的第三基准时间信息与第三数据信息绑定后发送至第二处理单元。S201. Bind the third reference time information when the third data information is acquired with the third data information and send it to the second processing unit.
该方法适于前述的第三信息源,具体可参见前面的描述,在此不再赘述。This method is suitable for the foregoing third information source, and details may be referred to the foregoing description, which will not be repeated here.
本公开第四实施例示出的基于多信息源的信息处理方法包括如下步骤:The information processing method based on multiple information sources shown in the fourth embodiment of the present disclosure includes the following steps:
周期性地向信息源发送第四基准时间信息,以使得信息源以第四基准时间信息为时间基准向第二处理单元发送第四数据信息。Periodically sending the fourth reference time information to the information source, so that the information source sends the fourth data information to the second processing unit using the fourth reference time information as a time reference.
该方法适于前述的第四信息源,具体可参见前面的描述,在此不再赘述。This method is suitable for the foregoing fourth information source, and details may be referred to the foregoing description, which will not be repeated here.
本公开一示例性实施例还提供了一种基于多信息源的信息处理方法,应用于第二处理器,第二处理器例如为上述的基于多信息源的信息处理系统中的第二处理器,如图8所示,本公开第五实施例示出的基于多信息源的信息处理方法包括:An exemplary embodiment of the present disclosure also provides an information processing method based on multiple information sources, which is applied to a second processor, for example, the second processor in the above-mentioned information processing system based on multiple information sources , as shown in FIG. 8 , the information processing method based on multiple information sources shown in the fifth embodiment of the present disclosure includes:
S10、接收信息源发送的第一数据信息;S10. Receive the first data information sent by the information source;
S20、接收第一处理器发送的第一基准时间信息;S20. Receive first reference time information sent by the first processor;
S30、将第一数据信息以及相对应的第一基准时间信息绑定。S30. Bind the first data information and the corresponding first reference time information.
该方法适于前述的第二处理器,具体可参见前面的描述,在此不再赘述。This method is suitable for the aforementioned second processor, for details, reference may be made to the foregoing description, and details are not repeated here.
如前所述,在前述的信息源包括激光雷达,激光雷达通过带编码器的电机驱动旋转的实施例中,激光雷达的第四数据信息与编码器的第三数据信息需要进行对应,基于此,如图9所示,本公开第六实施例示出的基于多信息源的信息处理方法还包括:As mentioned above, in the aforementioned embodiment where the information source includes laser radar, and the laser radar is driven by a motor with an encoder to rotate, the fourth data information of the laser radar needs to correspond to the third data information of the encoder. Based on this , as shown in FIG. 9 , the information processing method based on multiple information sources shown in the sixth embodiment of the present disclosure further includes:
S11、接收激光雷达发送的第四数据信息和对应的第四基准时间信息;S11. Receive fourth data information and corresponding fourth reference time information sent by the lidar;
S12、接收第一处理器发送的编码器的第三数据信息和对应的第三基准时间信息;S12. Receive the third data information of the encoder and the corresponding third reference time information sent by the first processor;
S13、基于第四基准时间信息、第三数据信息以及第三基准时间信息,确定与第四基准时间信息对应的编码器数据信息;S13. Based on the fourth reference time information, the third data information, and the third reference time information, determine encoder data information corresponding to the fourth reference time information;
S14、基于第四数据信息和编码器数据信息,确定雷达数据信息。S14. Determine radar data information based on the fourth data information and encoder data information.
本实施例中,为了使得激光雷达的数据与编码器的数据对应,根据第四基准时间信息、第三数据信息以及第三基准时间信息,确定出与第四基准时间信息对应的编码器数据信息,再将第四数据信息与编码器数据信息进行合并,保证激光雷达数据与编码器数据的匹配,进而保证后续运算的准确性。In this embodiment, in order to make the lidar data correspond to the encoder data, the encoder data information corresponding to the fourth reference time information is determined according to the fourth reference time information, the third data information, and the third reference time information , and then merge the fourth data information with the encoder data information to ensure the matching of the lidar data and the encoder data, thereby ensuring the accuracy of subsequent calculations.
其中,可采用线性插值法将激光雷达数据与编码器数据对应。示例性地,激光雷达的第四基准时间对应的编码器位置数据

其中,t1和t2是编码器相邻的两个数据采样时刻,R1和R2是编码器分别在t1和t2两个数据采样时刻的绝对位置数据,tr为激光雷达的数据采样时刻。Among them, t1 and t2 are the two adjacent data sampling moments of the encoder, R1 and R2 are the absolute position data of the encoder at the two data sampling moments of t1 and t2 respectively, tr is the laser radar Data sampling time.
本实施例中,通过线性插值法能够准确地确定出激光雷达的数据采样时刻所对应的编码器的绝对位置数据,从而保证激光雷达数据与编码器数据的匹配,进而保证后续运算的准确性。In this embodiment, the absolute position data of the encoder corresponding to the laser radar data sampling time can be accurately determined by linear interpolation, thereby ensuring the matching of the laser radar data and the encoder data, and further ensuring the accuracy of subsequent calculations.
上面描述的内容可以单独地或者以各种方式组合起来实施,而这些变型方式都在本公开的保护范围之内。The content described above can be implemented alone or combined in various ways, and these variants are all within the protection scope of the present disclosure.
本公开是参照根据本公开实施例的方法、装置(设备)和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。The present disclosure is described with reference to flowchart illustrations and/or block diagrams of methods, apparatus (devices) and computer program products according to embodiments of the present disclosure. It should be understood that each procedure and/or block in the flowchart and/or block diagram, and a combination of procedures and/or blocks in the flowchart and/or block diagram can be realized by computer program instructions. These computer program instructions may be provided to a general purpose computer, special purpose computer, embedded processor, or processor of other programmable data processing equipment to produce a machine such that the instructions executed by the processor of the computer or other programmable data processing equipment produce a An apparatus for realizing the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。These computer program instructions may also be stored in a computer-readable memory capable of directing a computer or other programmable data processing apparatus to operate in a specific manner, such that the instructions stored in the computer-readable memory produce an article of manufacture comprising instruction means, the instructions The device realizes the function specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。These computer program instructions can also be loaded onto a computer or other programmable data processing device, causing a series of operational steps to be performed on the computer or other programmable device to produce a computer-implemented process, thereby The instructions provide steps for implementing the functions specified in the flow chart or blocks of the flowchart and/or the block or blocks of the block diagrams.
在本公开中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括……”限定的要素,并不排除在包括所述要素的物品或者设备中还存在另外的相同要素。In this disclosure, the terms "comprises", "comprises" or any other variation thereof are intended to cover a non-exclusive inclusion such that an article or device comprising a series of elements includes not only those elements but also items not expressly listed. Other elements, or also include elements inherent in the article or equipment. Without further limitations, an element defined by the phrase "comprising..." does not exclude the presence of additional identical elements in the article or device comprising said element.
尽管已描述了本公开的优选实施例,但本领域技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本公开范围的所有变更和修改。While preferred embodiments of the present disclosure have been described, additional changes and modifications can be made to these embodiments by those skilled in the art once the basic inventive concept is appreciated. Therefore, it is intended that the appended claims be construed to cover the preferred embodiment and all changes and modifications which fall within the scope of the present disclosure.
显然,本领域技术人员可以对本公开进行各种改动和变型而不脱离本公开的精神和范围。这样,倘若本公开的这些修改和变型属于本公开权利要求及其等同技术的范围之内,则本公开的意图也包含这些改动和变型在内。Obviously, those skilled in the art can make various changes and modifications to the present disclosure without departing from the spirit and scope of the present disclosure. In this way, if these modifications and variations of the present disclosure fall within the scope of the claims of the present disclosure and equivalent technologies thereof, the intent of the present disclosure is to also include these modifications and variations.
Claims (6)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210913280.XACN115017222B (en) | 2022-08-01 | 2022-08-01 | Information processing system and method based on multiple information sources |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210913280.XACN115017222B (en) | 2022-08-01 | 2022-08-01 | Information processing system and method based on multiple information sources |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115017222A CN115017222A (en) | 2022-09-06 |
| CN115017222Btrue CN115017222B (en) | 2022-11-08 |
Family
ID=83065610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210913280.XAActiveCN115017222B (en) | 2022-08-01 | 2022-08-01 | Information processing system and method based on multiple information sources |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115017222B (en) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101651601A (en)* | 2008-08-11 | 2010-02-17 | 华为技术有限公司 | Resource allocation method, system and related device |
| CN101741614A (en)* | 2009-11-20 | 2010-06-16 | 中国地质调查局发展研究中心 | Equivalent type node manager and equivalent type node management method |
| CN101783768A (en)* | 2010-03-08 | 2010-07-21 | 东南大学 | Quantity assurance method of grid service based on resource reservation |
| CN103279564A (en)* | 2013-06-14 | 2013-09-04 | 江苏瀚远科技股份有限公司 | HTML-based (hypertext markup language-based) chart data output method and device |
| CN103543954A (en)* | 2012-07-16 | 2014-01-29 | 中兴通讯股份有限公司 | Data storage management method and device |
| CN108762193A (en)* | 2018-07-31 | 2018-11-06 | 吉林大学 | Numerically controlled machine remote data acquire and analysis system |
| CN208158599U (en)* | 2018-06-25 | 2018-11-27 | 北京津发科技股份有限公司 | A kind of multimodal human-computer interaction and man-machine environment test data synchronizing device and system |
| CN111309094A (en)* | 2020-02-06 | 2020-06-19 | 上海图趣信息科技有限公司 | Synchronous board card and method for data acquisition of sensor equipment |
| CN112422412A (en)* | 2020-11-09 | 2021-02-26 | 北京百度网讯科技有限公司 | Information processing method, apparatus, equipment and medium |
| CN112564883A (en)* | 2020-12-03 | 2021-03-26 | 苏州挚途科技有限公司 | Time synchronization apparatus, method and automatic driving system |
| CN114567406A (en)* | 2022-02-25 | 2022-05-31 | 北京京东乾石科技有限公司 | Clock synchronization device and electronic equipment |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9039924B2 (en)* | 2010-12-02 | 2015-05-26 | Frosty Cold, Llc | Cooling agent for cold packs and food and beverage containers |
| US20190347808A1 (en)* | 2018-05-09 | 2019-11-14 | Ford Global Technologies, Llc | Monocular Visual Odometry: Speed And Yaw Rate Of Vehicle From Rear-View Camera |
| EP4436142A3 (en)* | 2019-05-06 | 2024-12-04 | Strong Force IoT Portfolio 2016, LLC | Platform for facilitating development of intelligence in an industrial internet of things system |
| CN112311087A (en)* | 2019-07-29 | 2021-02-02 | 南寅 | A kind of intelligent monitoring unit, method and electric energy meter box with multi-information band communication |
| CN113034886A (en)* | 2019-12-25 | 2021-06-25 | 炬芯科技股份有限公司 | Remote control method and device |
| CN112666954B (en)* | 2020-12-31 | 2024-09-17 | 上海商汤临港智能科技有限公司 | Intelligent driving device, intelligent driving method, intelligent driving system and driving device |
- 2022
- 2022-08-01CNCN202210913280.XApatent/CN115017222B/enactiveActive
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101651601A (en)* | 2008-08-11 | 2010-02-17 | 华为技术有限公司 | Resource allocation method, system and related device |
| CN101741614A (en)* | 2009-11-20 | 2010-06-16 | 中国地质调查局发展研究中心 | Equivalent type node manager and equivalent type node management method |
| CN101783768A (en)* | 2010-03-08 | 2010-07-21 | 东南大学 | Quantity assurance method of grid service based on resource reservation |
| CN103543954A (en)* | 2012-07-16 | 2014-01-29 | 中兴通讯股份有限公司 | Data storage management method and device |
| CN103279564A (en)* | 2013-06-14 | 2013-09-04 | 江苏瀚远科技股份有限公司 | HTML-based (hypertext markup language-based) chart data output method and device |
| CN208158599U (en)* | 2018-06-25 | 2018-11-27 | 北京津发科技股份有限公司 | A kind of multimodal human-computer interaction and man-machine environment test data synchronizing device and system |
| CN108762193A (en)* | 2018-07-31 | 2018-11-06 | 吉林大学 | Numerically controlled machine remote data acquire and analysis system |
| CN111309094A (en)* | 2020-02-06 | 2020-06-19 | 上海图趣信息科技有限公司 | Synchronous board card and method for data acquisition of sensor equipment |
| CN112422412A (en)* | 2020-11-09 | 2021-02-26 | 北京百度网讯科技有限公司 | Information processing method, apparatus, equipment and medium |
| CN112564883A (en)* | 2020-12-03 | 2021-03-26 | 苏州挚途科技有限公司 | Time synchronization apparatus, method and automatic driving system |
| CN114567406A (en)* | 2022-02-25 | 2022-05-31 | 北京京东乾石科技有限公司 | Clock synchronization device and electronic equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115017222A (en) | 2022-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6176837B1 (en) | Motion tracking system | |
| US20190033867A1 (en) | Systems and methods for determining a vehicle position | |
| CN111756463A (en) | Time synchronization system and method for vehicles | |
| CN109084785A (en) | More vehicle co-locateds and map constructing method, device, equipment and storage medium | |
| US20170307763A1 (en) | Road registration differential gps | |
| CN110178048A (en) | Method and system for generating and updating vehicle environment map | |
| US20220214186A1 (en) | Automated map making and positioning | |
| CN111572526A (en) | Positioning method and system for automatic driving system | |
| CN110162032B (en) | Vehicle map data collection system and method | |
| CN113820735A (en) | Method for determining location information, location measuring device, terminal and storage medium | |
| CN112769516A (en) | Data synchronous acquisition method and device, electronic equipment and storage medium | |
| CN110160545A (en) | A kind of the enhancing positioning system and method for laser radar and GPS | |
| CN114942025A (en) | Vehicle navigation and positioning method, device, electronic device and storage medium | |
| US20210240185A1 (en) | Shooting control method and unmanned aerial vehicle | |
| Klingbeil et al. | Direct georeferencing for portable mapping systems: In the air and on the ground | |
| CN115017222B (en) | Information processing system and method based on multiple information sources | |
| CN107300704B (en) | Indoor positioning method and device for unmanned aerial vehicle | |
| CN116047481A (en) | Method, device, equipment and storage medium for correcting point cloud data distortion | |
| CN113075665B (en) | Underwater positioning method, underwater vehicle and computer readable storage medium | |
| EP4296619A1 (en) | Clock synchronisation | |
| Xu et al. | Real-time LiDAR data assocation aided by IMU in high dynamic environment | |
| RU2207513C1 (en) | Combination method of forming of flight vehicle and object motion parameters observed from its board in stabilized coordinate system, complex system of its realization | |
| Skaloud et al. | GPs/INs Integration | |
| CN112083400A (en) | Calibration method, device and storage medium for moving object and sensor thereof | |
| CN114993313B (en) | Trajectory calculation and registration method based on autonomous underwater robot inertial navigation and ultra-short baseline positioning sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |