CN114983761A - Rehabilitation exercise device after interventional therapy in cardiology department - Google Patents
Rehabilitation exercise device after interventional therapy in cardiology departmentDownload PDFInfo
- Publication number
- CN114983761A CN114983761ACN202210655535.7ACN202210655535ACN114983761ACN 114983761 ACN114983761 ACN 114983761ACN 202210655535 ACN202210655535 ACN 202210655535ACN 114983761 ACN114983761 ACN 114983761A
- Authority
- CN
- China
- Prior art keywords
- rotatably connected
- support
- sliding
- fixedly connected
- rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000002560therapeutic procedureMethods0.000titleclaimsabstractdescription14
- 230000005540biological transmissionEffects0.000claimsdescription26
- 230000006835compressionEffects0.000claimsdescription7
- 238000007906compressionMethods0.000claimsdescription7
- 230000001360synchronised effectEffects0.000claimsdescription3
- 210000003141lower extremityAnatomy0.000abstractdescription13
- 210000001364upper extremityAnatomy0.000abstractdescription12
- 230000000694effectsEffects0.000abstractdescription6
- 210000003414extremityAnatomy0.000abstractdescription6
- 238000010586diagramMethods0.000description10
- 210000001503jointAnatomy0.000description10
- 210000002683footAnatomy0.000description6
- 230000009471actionEffects0.000description3
- 230000007774longtermEffects0.000description3
- 238000000034methodMethods0.000description3
- 210000000544articulatio talocruralisAnatomy0.000description2
- 238000005452bendingMethods0.000description2
- 230000017531blood circulationEffects0.000description2
- 238000006073displacement reactionMethods0.000description2
- 210000002310elbow jointAnatomy0.000description2
- 210000004247handAnatomy0.000description2
- 210000000629knee jointAnatomy0.000description2
- 244000309466calfSpecies0.000description1
- 230000007423decreaseEffects0.000description1
- 230000007547defectEffects0.000description1
- 201000010099diseaseDiseases0.000description1
- 208000037265diseases, disorders, signs and symptomsDiseases0.000description1
- 239000003814drugSubstances0.000description1
- 229940079593drugDrugs0.000description1
- 210000002478hand jointAnatomy0.000description1
- 230000003993interactionEffects0.000description1
- 210000003127kneeAnatomy0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000008569processEffects0.000description1
- 230000001737promoting effectEffects0.000description1
- 238000011084recoveryMethods0.000description1
- 230000002040relaxant effectEffects0.000description1
- 238000001356surgical procedureMethods0.000description1
- 238000002604ultrasonographyMethods0.000description1
- 210000000689upper legAnatomy0.000description1
- 210000003857wrist jointAnatomy0.000description1
Images







Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/024—Knee
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0266—Foot
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
- A61H1/0277—Elbow
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
- A61H1/0285—Hand
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
- A61H15/0078—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains power-driven
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/035—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously
- A63B23/03516—For both arms together or both legs together; Aspects related to the co-ordination between right and left side limbs of a user
- A63B23/03533—With separate means driven by each limb, i.e. performing different movements
- A63B23/03541—Moving independently from each other
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/06—Arms
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/06—Arms
- A61H2205/065—Hands
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A61H2205/102—Knee
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/12—Feet
Landscapes
- Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Pain & Pain Management (AREA)
- Rehabilitation Therapy (AREA)
- Epidemiology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Dermatology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rehabilitation Tools (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及医疗辅助技术领域,尤其是涉及心内科介入治疗术后康复锻炼装置。The invention relates to the technical field of medical assistance, in particular to a rehabilitation exercise device after interventional therapy in cardiology department.
背景技术Background technique
介入科是介于用药和开刀手术两个科室之间的比较新的前沿科室,是用微创的方法来诊断和治疗一系列的疾病,但是多数是在B超、CT、磁共振等设备下完成的治疗。患者在进行介入科手术后需要进行静躺修养,而长时间的修养会使得患者的身体机能下降,对于手术患者来说,长时间的静躺会使得其肢体关节活动滞涩,因此,患者康复过程中需要进行康复锻炼来辅助其更好的康复。现有的康复训练装置在使用过程中只可以带动患者进行屈膝或者伸臂摆臂的动作,只有上肢的肘关节和下肢的膝关节进行的部分的训练,一个患者恢复至正常人,在日常生活中用到的不仅仅只有这两个关节而已,控制手部和脚部的腕关节和肘关节同样至关重要,而现有的训练装置对这两部分无法进行活动,长时间的静躺也会使手部和脚部的血液流通变缓,从而使得患者的康复训练效果较差,无法满足实际使用情况的需要。Interventional department is a relatively new frontier department between the two departments of drug use and surgical operation. It uses minimally invasive methods to diagnose and treat a series of diseases, but most of them are performed under B-ultrasound, CT, magnetic resonance and other equipment. completed treatment. The patient needs to lie down after the interventional surgery, and the long-term rehabilitation will make the patient's physical function decline. Rehabilitation exercises are required during the process to assist its better recovery. The existing rehabilitation training device can only drive the patient to bend the knee or extend the arm and swing the arm during use, and only part of the training is performed by the elbow joint of the upper limb and the knee joint of the lower limb. It is not only these two joints that are used in the training, but it is also crucial to control the wrist and elbow joints of the hands and feet, and the existing training devices cannot move these two parts, and long-term lying still is also very important. It will slow down the blood circulation of the hands and feet, so that the patient's rehabilitation training effect is poor and cannot meet the needs of actual use.
发明内容SUMMARY OF THE INVENTION
针对上述情况,为克服现有技术的缺陷,本发明提供心内科介入治疗术后康复锻炼装置,通过本设计有效的解决了现有的心内科介入治疗术后康复锻炼装置只对上肢和下肢的肢体进行互动,对于上肢和下肢的关节处缺少相应的锻炼措施,两处关节处训练效果差,使患者后续生活中应对困难的问题。In view of the above situation, in order to overcome the defects of the prior art, the present invention provides a rehabilitation exercise device after interventional therapy in cardiology, which effectively solves the problem that the existing rehabilitation exercise device after interventional therapy in cardiology only affects the upper and lower limbs. The limbs interact, and there is a lack of corresponding exercise measures for the joints of the upper and lower limbs, and the training effect of the two joints is poor, which makes the patient cope with difficult problems in subsequent life.
为实现上述目的,本发明提供如下技术方案:本发明包括训练台,所述训练台上固定连接有支座,所述支座左右两侧转动连接有可往复摆动的臂托,所述臂托前侧转动连接有随臂托摆动进行同步往复转动的握柄,所述支座中部滑动连接有按摩块,所述按摩块内转动连接有可转动的按摩盘,所述按摩盘底部下端转动连接有可前后滑动的滑台,所述滑台与所述训练台滑动连接,所述滑台上滑动连接有两组可前后移动的牵引架,所述牵引架另一侧贯穿滑台并且与训练台滑动连接,所述牵引架内滑动连接有角度可调的牵引块。In order to achieve the above purpose, the present invention provides the following technical solutions: the present invention includes a training platform, a support is fixedly connected to the training platform, and the left and right sides of the support are rotatably connected with arm supports that can swing back and forth. The front side is rotatably connected with a handle that rotates synchronously with the swing of the arm rest, a massage block is slidably connected in the middle of the support, a rotatable massage disc is rotatably connected in the massage block, and the lower end of the bottom of the massage disc is rotatably connected There is a sliding table that can slide back and forth, the sliding table is slidably connected with the training platform, and two sets of traction frames that can move forward and backward are slidably connected to the sliding table. The platform is slidably connected, and a traction block with an adjustable angle is slidably connected in the traction frame.
优选的,所述支座上转动连接有可转动的第一连杆,所述第一连杆转动连接有第二连杆,所述第二连杆开有第一滑槽,所述第一滑槽内连接有与支座转动连接的第一圆柱杆,所述第一圆柱杆左右两侧均转动连接有第三连杆,所述第三连杆上侧与所述臂托固定连接,所述第三连杆上开有第二滑槽,所述第二滑槽内滑动连接有第二圆柱杆,所述第二圆柱杆与所述第二连杆的顶端转动连接;Preferably, a rotatable first connecting rod is rotatably connected to the support, a second connecting rod is rotatably connected to the first connecting rod, and a first sliding groove is opened on the second connecting rod, and the first connecting rod is rotatably connected with the first connecting rod. A first cylindrical rod rotatably connected with the support is connected in the chute, a third connecting rod is rotatably connected to the left and right sides of the first cylindrical rod, and the upper side of the third connecting rod is fixedly connected with the arm support, The third connecting rod is provided with a second chute, a second cylindrical rod is slidably connected in the second chute, and the second cylindrical rod is rotatably connected with the top end of the second connecting rod;
所述第二圆柱杆底部转动连接有第四连杆,所述第四连杆转动连接有连接轴,所述连接轴上与所述第二连杆转动连接,所述连接轴上侧与所述握柄固定连接。The bottom of the second cylindrical rod is rotatably connected with a fourth connecting rod, the fourth connecting rod is rotatably connected with a connecting shaft, the connecting shaft is rotatably connected with the second connecting rod, and the upper side of the connecting shaft is connected with the connecting shaft. The handle is fixedly connected.
优选的,所述支座上转动连接有用于驱动的第一蜗杆,所述第一蜗杆上侧啮合有第一蜗轮,所述第一蜗轮位于支座的一侧并且与支座转动连接,所述支座另一侧转动连接有与第一蜗轮同轴固定连接的第一齿轮,所述第一齿轮啮合有第二齿轮,所述第二齿轮上侧啮合有与第一连杆同轴固定连接的第三齿轮。Preferably, the support is rotatably connected with a first worm for driving, the upper side of the first worm is engaged with a first worm wheel, the first worm wheel is located on one side of the support and is rotatably connected with the support, so The other side of the support is rotatably connected with a first gear that is coaxially and fixedly connected to the first worm gear, the first gear is meshed with a second gear, and the upper side of the second gear is meshed with a first connecting rod fixed coaxially. connected third gear.
优选的,所述第一蜗杆上同轴固定连接有带轮组,所述带轮组另一侧固定连接有轴套,所述轴套与所述训练台滑动连接,所述轴套内滑动连接有滑移轴,所述滑移轴固定连接有与滑台转动连接的第二蜗杆,所述第二蜗杆啮合有第二蜗轮,所述第一蜗轮上偏心转动连接有第五连杆,所述第五连杆与所述训练台转动连接。Preferably, a pulley set is coaxially fixedly connected to the first worm, and a shaft sleeve is fixedly connected to the other side of the pulley set, the shaft sleeve is slidably connected to the training platform, and the shaft sleeve slides inside A sliding shaft is connected, the sliding shaft is fixedly connected with a second worm screw rotatably connected with the sliding table, the second worm screw is engaged with a second worm wheel, and a fifth connecting rod is eccentrically connected to the first worm wheel, The fifth link is rotatably connected with the training platform.
优选的,所述第二蜗轮同轴固定连接有第一传动齿轮,所述第一传动齿轮左右两侧均啮合有第二传动齿轮,所述第二传动齿轮底部同轴固定连接有圆盘,所述圆盘偏心连接有圆柱销,所述牵引架上开有与圆柱销滑动连接的第三滑槽。Preferably, the second worm gear is coaxially and fixedly connected with a first transmission gear, the left and right sides of the first transmission gear are meshed with a second transmission gear, and the bottom of the second transmission gear is coaxially and fixedly connected with a disc. A cylindrical pin is eccentrically connected to the disc, and a third chute that is slidably connected to the cylindrical pin is opened on the traction frame.
优选的,所述牵引架包括有牵引杆,所述第三滑槽位于牵引杆上,所述牵引杆固定连接有第一滑块,所述第一滑块上开有第一导向槽和第二导向槽,所述第一导向槽内滑动连接有可前后滑动的第二滑块,所述第二滑块与所述第一滑块滑动连接,所述第二滑块左右两侧均与牵引块转动连接,所述牵引块另一侧转动连接有第一支杆,所述第一支杆转动连接有与第二导向槽滑动连接的第三滑块。Preferably, the traction frame includes a traction rod, the third chute is located on the traction rod, the traction rod is fixedly connected with a first slider, and the first slider is provided with a first guide groove and a first sliding block. Two guide grooves, the first guide groove is slidably connected with a second sliding block that can slide back and forth, the second sliding block is slidably connected with the first sliding block, and the left and right sides of the second sliding block are connected to the The traction block is rotatably connected, the other side of the traction block is rotatably connected with a first support rod, and the first support rod is rotatably connected with a third sliding block slidably connected with the second guide groove.
优选的,所述左右两侧均转动连接有第四齿轮,所述第四齿轮下侧啮合有与训练台固定连接的齿条,所述第四齿轮中部同轴固定连接有与第一滑块转动连接的第三蜗杆,所述第三蜗杆啮合有第三蜗轮,所述第三蜗轮同轴固定连接有螺杆,所述螺杆与所述第一滑块转动连接,所述螺杆中部贯穿第二滑块并且第二滑块上开有与之配合的通孔,所述螺杆另一侧与第三滑块螺纹连接;Preferably, a fourth gear is rotatably connected to both the left and right sides, the lower side of the fourth gear is engaged with a rack that is fixedly connected to the training platform, and the middle of the fourth gear is coaxially and fixedly connected to the first slider. The third worm screw is rotatably connected, the third worm screw is engaged with a third worm wheel, the third worm wheel is coaxially and fixedly connected with a screw rod, the screw rod is rotatably connected with the first slider, and the middle part of the screw rod penetrates the second worm wheel. The slider and the second slider are provided with through holes matched with them, and the other side of the screw rod is threadedly connected with the third slider;
所述螺杆上套有第二滑块向后施力的压缩弹簧,所述第二滑块外侧固定连接有拉伸弹簧,所述拉伸弹簧另一端与所述训练台固定连接。The screw rod is sleeved with a compression spring for applying a second slider to the rear, a tension spring is fixedly connected to the outer side of the second slider, and the other end of the tension spring is fixedly connected to the training platform.
优选的,两个所述第二传动齿轮均同轴固定连接有支撑杆,所述支撑杆与所述按摩块转动连接,所述支撑杆与按摩盘固定连接,所述按摩盘与所述按摩块上均安装有突起球。。Preferably, the two second transmission gears are both coaxially and fixedly connected with a support rod, the support rod is rotatably connected with the massage block, the support rod is fixedly connected with the massage disc, and the massage disc is connected with the massage block. Protruding balls are installed on the blocks. .
与现有技术相比本发明的突出优点:装置上设置有臂托和牵引块,可以对患者上肢和下肢进行训练,同时臂托和牵引块同步运动,在训练对上下肢放松的同时还能训练其协调性;装置通过电机驱动,减轻医护人员的工作量,同时可以保障患者可以达到充足的训练量;臂托上设有同步转动的握柄,牵引块在移动时倾角可变,在活动上下肢的同时可以更多的对关节的部位进行放松舒缓,为患者后续自主训练打下基础,全面恢复患者身体的机能;本发明结构新颖,构思巧妙,操作简单方便,通过本设计有效的解决了现有的心内科介入治疗术后康复锻炼装置只对上肢和下肢的肢体进行互动,对于上肢和下肢的关节处缺少相应的锻炼措施,两处关节处训练效果差,使患者后续生活中应对困难的问题。Compared with the prior art, the present invention has the outstanding advantages: the device is provided with an arm support and a traction block, which can train the upper and lower limbs of the patient. At the same time, the arm support and the traction block move synchronously. Train its coordination; the device is driven by a motor, reducing the workload of medical staff, and at the same time ensuring that patients can achieve sufficient training volume; the arm rest is provided with a synchronously rotating handle, the inclination of the traction block is variable when moving, and the The upper and lower limbs can be more relaxed and relieved at the same time, which lays a foundation for the patient's follow-up autonomous training and fully restores the patient's body functions; the invention has novel structure, ingenious conception, simple and convenient operation, and the design effectively solves the problem. The existing rehabilitation exercise device after interventional therapy in cardiology only interacts with the upper and lower limbs, and lacks corresponding exercise measures for the joints of the upper and lower limbs, and the training effect at the two joints is poor, making it difficult for patients to cope in the follow-up life. The problem.
附图说明Description of drawings
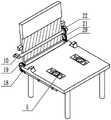
图1为本发明整体结构示意图。FIG. 1 is a schematic diagram of the overall structure of the present invention.
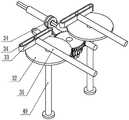
图2为本发支座连接结构示意图。FIG. 2 is a schematic diagram of the connection structure of the support of the present invention.
图3为本发明支座剖面结构示意图。FIG. 3 is a schematic diagram of the cross-sectional structure of the support of the present invention.
图4为本发明臂托第一轴侧结构示意图。FIG. 4 is a schematic diagram of the structure of the first axis side of the arm support of the present invention.
图5为本发明臂托第二轴侧结构示意图。FIG. 5 is a schematic view of the structure of the second axis side of the arm support of the present invention.
图6为本发明第二连杆连接结构示意图。FIG. 6 is a schematic diagram of the second connecting rod connection structure of the present invention.
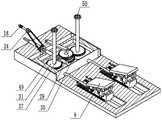
图7为本发明训练台剖面结构示意图。FIG. 7 is a schematic diagram of the cross-sectional structure of the training platform of the present invention.
图8为本发明圆盘底端结构示意图。FIG. 8 is a schematic diagram of the structure of the bottom end of the disc according to the present invention.
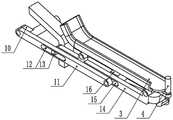
图9为本发明牵引架剖面结构示意图。FIG. 9 is a schematic diagram of the cross-sectional structure of the traction frame of the present invention.
图10为本发明牵引架部分结构示意图。FIG. 10 is a schematic diagram of the partial structure of the traction frame of the present invention.
图11为本发明轴套连接结构示意图。FIG. 11 is a schematic diagram of the connection structure of the shaft sleeve of the present invention.
图中标号:1、训练台;2、支座;3、臂托;4、握柄;5、按摩块;6、按摩盘;7、滑台;8、牵引架;9、牵引块;10、第一连杆;11、第二连杆;12、第一滑槽;13、第一圆柱杆;14、第三连杆;15、第二滑槽;16、第二圆柱杆;17、连接轴;18、第一蜗杆;19、第一蜗轮;20、第一齿轮;21、第二齿轮;22、第三齿轮;23、第四连杆;24、带轮组;25、轴套;26、滑移轴;27、第二蜗杆;28、第二蜗轮;29、第五连杆;30、第一传动齿轮;31、第二传动齿轮;32、圆盘;33、圆柱销;34、第三滑槽;35、牵引杆;36、第一滑块;37、第一导向槽;38、第二导向槽;39、第二滑块;40、第一支杆;41、第三滑块;42、第四齿轮;43、齿条;44、第三蜗杆;45、第三蜗轮;46、螺杆;47、压缩弹簧;48、拉伸弹簧;49、支撑杆;50、突起球。Labels in the figure: 1, training platform; 2, support; 3, arm support; 4, handle; 5, massage block; 6, massage disc; 7, sliding table; 8, traction frame; 9, traction block; 10 , the first connecting rod; 11, the second connecting rod; 12, the first chute; 13, the first cylindrical rod; 14, the third connecting rod; 15, the second chute; 16, the second cylindrical rod; 17, connecting shaft; 18, the first worm; 19, the first worm gear; 20, the first gear; 21, the second gear; 22, the third gear; 23, the fourth connecting rod; 24, the pulley; 25, the bushing ; 26, the sliding shaft; 27, the second worm; 28, the second worm gear; 29, the fifth connecting rod; 30, the first transmission gear; 31, the second transmission gear; 32, the disc; 33, the cylindrical pin; 34, the third chute; 35, the traction rod; 36, the first slider; 37, the first guide groove; 38, the second guide groove; 39, the second slider; 40, the first support rod; 41, the first Three sliders; 42, fourth gear; 43, rack; 44, third worm; 45, third worm gear; 46, screw; 47, compression spring; 48, tension spring; 49, support rod; 50, protrusion ball.
具体实施方式Detailed ways
下面结合附图1-11对本发明的具体实施方式做进一步详细说明。The specific embodiments of the present invention will be further described in detail below with reference to the accompanying drawings 1-11.
本发明包括训练台1,所述训练台1上固定连接有支座2,所述支座2左右两侧转动连接有可往复摆动的臂托3,所述臂托前侧转动连接有随臂托3摆动进行同步往复转动的握柄4,所述支座2中部滑动连接有按摩块5,所述按摩块5内转动连接有可转动的按摩盘6,所述按摩盘6底部下端转动连接有可前后滑动的滑台7,所述滑台7与所述训练台1滑动连接,所述滑台7上滑动连接有两组可前后移动的牵引架8,所述牵引架8另一侧贯穿滑台7并且与训练台1滑动连接,所述牵引架8内滑动连接有角度可调的牵引块9。The present invention includes a training platform 1, a
支座2由一个水平板和一个倾斜板组成,用于对患者进行坐立时的支撑,臂托3有左右两组,分别用于对患者左右双臂的支撑,臂托3后侧有向上弯折的弧度,在训练时可以对患者的肘部进行保护,臂托3内侧为水平状,臂托3外侧有向上弯折的弧度,可以方便患者将手臂向臂托3内进行放置,同时也避免手臂在随臂托3运动时在惯性的作用下与臂托3发生脱离,臂托3在往复摆动时可以带动握柄4进行往复的摆动,患者手臂放置在臂托3上,手部握住握柄4,握柄4在随臂托3摆动的同时还会相对臂托3进行左右的摆动,握柄4左右摆动带动患者手掌相对手臂进行左右的摆动,活动患者的手部关节,缓解长时间造成的肢体僵硬,按摩块5与滑台7进行同步的往复滑动,按摩块5内的按摩盘6在前后滑动时可以进行自转,按摩块5和按摩盘6对患者进行不同轨迹的按摩,提高患者的按摩体验,滑台7前后移动时可以带动牵引架8进行前后的移动,牵引架8上侧的牵引块9用于固定患者的脚部,牵引块9上可以夹装卡扣式固定带,将患者的脚部固定在牵引块9上,牵引块9通过牵引架8的驱动带动患者的脚部进行前后移动,患者脚部前后可移动可以舒展活动大腿和小腿的关节,同时牵引块9在前后移动时自身与水平面的倾角也会往复的摆动,帮助患者脚部的踝关节进行锻炼,通过对患者四肢各个关节的舒缓锻炼,缓解患者长时间不动导致的肢体僵硬,辅助患者进行康复。The
所述支座2上转动连接有可转动的第一连杆10,所述第一连杆10转动连接有第二连杆11,所述第二连杆11开有第一滑槽12,所述第一滑槽12内连接有与支座2转动连接的第一圆柱杆13,所述第一圆柱杆13左右两侧均转动连接有第三连杆14,所述第三连杆14上侧与所述臂托3固定连接,所述第三连杆14上开有第二滑槽15,所述第二滑槽15内滑动连接有第二圆柱杆16,所述第二圆柱杆16与所述第二连杆11的顶端转动连接;The
所述第二圆柱杆16底部转动连接有第四连杆23,所述第四连杆23转动连接有连接轴17,所述连接轴17上与所述第二连杆11转动连接,所述连接轴17上侧与所述握柄4固定连接。A fourth connecting
第一圆柱杆13在第一滑槽12内可以进行转动也可进行相对的滑动,同样第二圆柱杆16在第二滑槽15与前者的连接关系相同,如图3所示,当第一连杆10向下转动时,第一连杆10带动第二连杆11的左侧向下移动,同时第二连杆11为了跟随第一连杆10的移动,第二连杆11以第一圆柱杆13为中心点向上逆时针转动,同时第二连杆11会有向左的位移量,当第二连杆11逆时针转动和向左移动时,第二连杆11右侧的第二圆柱杆16沿第二滑槽15向左移动,同时第二圆柱杆16推动第三连杆14以第一圆柱杆13与支座2的铰接点为圆心进行向上的翻转,第三连杆14向上翻转带动臂托3和患者的手臂进行向上的摆动,如图5和图6所示,第二圆柱杆16向做移动时,第二圆柱杆16带动第四连杆23向左移动,连接轴17与第四连杆23和握柄4的铰接点为朝向不同的突起,当第四连杆23向左移动时,第四连杆23通过连接好走带动握柄4向臂托3内侧转动,从而使握柄4在随臂托3往复摆动的同时带动患者手部进行弧形的摆动,对患者上肢多个关节进行锻炼,训练更加全面,增大训练的效果。The first
所述支座2上转动连接有用于驱动的第一蜗杆18,所述第一蜗杆18上侧啮合有第一蜗轮19,所述第一蜗轮19位于支座2的一侧并且与支座2转动连接,所述支座2另一侧转动连接有与第一蜗轮19同轴固定连接的第一齿轮20,所述第一齿轮20啮合有第二齿轮21,所述第二齿轮21上侧啮合有与第一连杆10同轴固定连接的第三齿轮22。The
第一蜗杆18上连接有驱动电机用于整个装置动力的传动,电机工作时通过第一蜗杆18带动第一蜗轮19进行转动,第一蜗轮19与第一齿轮20同轴固定连接,第一蜗轮19转动带动第一齿轮20进行转动,第一齿轮20转动带动第二齿轮21进行转动,第二齿轮21转动带动第三齿轮22进行转动,第三齿轮22左右两侧均有第一连杆10,第三齿轮22的转动为第一连杆10的转动提供动力的驱动,同时第一蜗轮19和第一蜗杆18之间反向自锁的特性,也可以避免第三齿轮22被反向驱动。The
所述第一蜗杆18上同轴固定连接有带轮组24,所述带轮组24另一侧固定连接有轴套25,所述轴套25与所述训练台1滑动连接,所述轴套25内滑动连接有滑移轴26,所述滑移轴26固定连接有与滑台7转动连接的第二蜗杆27,所述第二蜗杆27啮合有第二蜗轮28,所述第一蜗轮19上偏心转动连接有第五连杆29,所述第五连杆29与所述训练台1转动连接。The
带轮组24是由两个带轮和一条皮带构成,皮带和带轮优选带卡槽的传动更加稳定,第一蜗杆18的转动通过带轮组24带动轴套25进行转动,轴套25与训练台1之间之后转动的自由度,同时滑移轴26与轴套25之间只有滑动的自由度,轴套25与滑台7之间只有转动的自由度,轴套25的转动通过滑移轴26带动第二蜗杆27进行转动,第二蜗杆27转动带动第二蜗轮28进行转动,第五连杆29与第二蜗轮28之间偏心连接,第五连杆29一端与训练台1转动连接,在第五连杆29长度恒定的状态时,第二蜗轮28转动时在第五连杆29的作用下,第五连杆29会拉动第二蜗轮28和第二蜗杆27进行前后的移动,第二蜗轮28与滑台7之间只有转动的自由度,第二蜗杆27的前后位移通过滑台7的前后移动进行消除,从而使滑台7的前后移动与臂托3的摆动同步进行。The pulley set 24 is composed of two pulleys and a belt. The belt and pulley preferably have a more stable transmission with a slot. The rotation of the
所述第二蜗轮28同轴固定连接有第一传动齿轮30,所述第一传动齿轮30左右两侧均啮合有第二传动齿轮31,所述第二传动齿轮31底部同轴固定连接有圆盘32,所述圆盘32偏心连接有圆柱销33,所述牵引架8上开有与圆柱销33滑动连接的第三滑槽34。The
牵引架8与训练台1之间只有前后滑动的自由度,第二传动齿轮31和圆盘32均有两组,位于第一传动齿轮30的两侧,当第二蜗轮28带动第一传动齿轮30转动时,第一传动齿轮30带动两个传动齿轮同步进行转动,第二传动齿轮31转动带动圆盘32进向转动,圆盘32上的圆柱销33与圆盘32偏心连接,在转动的圆盘32在圆柱销33和第三滑槽34的作用下带动牵引架8前后的移动,牵引架8前后移动通过牵引块9对患者的膝关节进行屈腿和伸腿的动作,训练患者的下肢及其关节。There is only the freedom of sliding back and forth between the
所述牵引架8包括有牵引杆35,所述第三滑槽34位于牵引杆35上,所述牵引杆35固定连接有第一滑块36,所述第一滑块36上开有第一导向槽37和第二导向槽38,所述第一导向槽37内滑动连接有可前后滑动的第二滑块39,所述第二滑块39与所述第一滑块36滑动连接,所述第二滑块39左右两侧均与牵引块9转动连接,所述牵引块9另一侧转动连接有第一支杆40,所述第一支杆40转动连接有与第二导向槽38滑动连接的第三滑块41;所述左右两侧均转动连接有第四齿轮42,所述第四齿轮42下侧啮合有与训练台1固定连接的齿条43,所述第四齿轮42中部同轴固定连接有与第一滑块36转动连接的第三蜗杆44,所述第三蜗杆44啮合有第三蜗轮45,所述第三蜗轮45同轴固定连接有螺杆46,所述螺杆46与所述第一滑块36转动连接,所述螺杆46中部贯穿第二滑块39并且第二滑块39上开有与之配合的通孔,所述螺杆46另一侧与第三滑块41螺纹连接;The
所述螺杆46上套有第二滑块39向后施力的压缩弹簧47,所述第二滑块39外侧固定连接有拉伸弹簧48,所述拉伸弹簧48另一端与所述训练台1固定连接。The
如图7、图9和图10所示,拉伸弹簧48对第二滑块39有向左侧的拉力,压缩弹簧47对第二滑块39有向右侧的弹力,当牵引架8带动螺杆46向右移动时,压缩弹簧47与第二滑块39之间的弹力增大第二滑块39会向右侧移动从而使压缩弹簧47和拉伸弹簧48再次保持平衡状态,第一滑块36随牵引架8向右移动时,第一滑块36两侧的第四齿轮42和齿条43的相互作用下第三蜗杆44会进行转动,第三蜗杆44转动会带动第三蜗轮45进行旋转,第三蜗轮45转动带动螺杆46进行旋转,螺杆46转动带动第三滑块41相对第一滑块36进行前后的移动,当第三滑块41向有移动时,第三滑块41带动第一支杆40的下侧向右移动,第一支杆40向右移动受其自身长度的限位,第一支杆40带动垫块向下进行倾斜,第二滑块39和第三滑块41在随第一滑块36前后移动时在第一滑块36上的位置随时进行这变化,从而使牵引块9的水平倾角发生改变,在对患者进行屈腿和伸腿的同时对患者的踝部关节进行活动舒缓,全面锻炼患者下肢。As shown in FIGS. 7 , 9 and 10 , the
两个所述第二传动齿轮31均同轴固定连接有支撑杆49,所述支撑杆49与所述按摩块5转动连接,所述支撑杆49与按摩盘6固定连接,所述按摩盘6与所述按摩块5上均安装有突起球50。支撑杆49与按摩块5和滑台7之间只有转动的自由度,滑台7的前后移动可以通过支撑杆49带动按摩块5进行前后的滑动,同时第二传递齿轮的自转可以通过支撑杆49带动按摩盘6进行旋转,按摩轮和按摩盘6上的凸起块为大小不同半球状,为患者提供不同的按摩体验,促进患者身体血液的循环,放松训练的疲惫感。The two second transmission gears 31 are both coaxially and fixedly connected with a
本发明结构新颖,构思巧妙,操作简单方便,通过本设计有效的解决了现有的心内科介入治疗术后康复锻炼装置只对上肢和下肢的肢体进行互动,对于上肢和下肢的关节处缺少相应的锻炼措施,两处关节处训练效果差,使患者后续生活中应对困难的问题。The present invention has novel structure, ingenious conception, simple and convenient operation, and effectively solves the problem that the existing rehabilitation exercise device after interventional therapy in cardiology only interacts with the limbs of the upper and lower limbs, and lacks corresponding functions at the joints of the upper and lower limbs. However, the training effect of the two joints is poor, which makes the patient cope with difficult problems in the follow-up life.
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。Finally, it should be noted that the above descriptions are only preferred embodiments of the present invention, and are not intended to limit the present invention. Although the present invention has been described in detail with reference to the foregoing embodiments, for those skilled in the art, the The technical solutions described in the foregoing embodiments can be modified, or some technical features thereof can be equivalently replaced, and any modifications, equivalent replacements, improvements, etc. made within the spirit and principle of the present invention shall be included. within the protection scope of the present invention.
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210655535.7ACN114983761A (en) | 2022-06-10 | 2022-06-10 | Rehabilitation exercise device after interventional therapy in cardiology department |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210655535.7ACN114983761A (en) | 2022-06-10 | 2022-06-10 | Rehabilitation exercise device after interventional therapy in cardiology department |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114983761Atrue CN114983761A (en) | 2022-09-02 |
Family
ID=83032380
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210655535.7AWithdrawnCN114983761A (en) | 2022-06-10 | 2022-06-10 | Rehabilitation exercise device after interventional therapy in cardiology department |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114983761A (en) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11756666B2 (en) | 2019-10-03 | 2023-09-12 | Rom Technologies, Inc. | Systems and methods to enable communication detection between devices and performance of a preventative action |
| US11830601B2 (en) | 2019-10-03 | 2023-11-28 | Rom Technologies, Inc. | System and method for facilitating cardiac rehabilitation among eligible users |
| US11887717B2 (en) | 2019-10-03 | 2024-01-30 | Rom Technologies, Inc. | System and method for using AI, machine learning and telemedicine to perform pulmonary rehabilitation via an electromechanical machine |
| US11915816B2 (en) | 2019-10-03 | 2024-02-27 | Rom Technologies, Inc. | Systems and methods of using artificial intelligence and machine learning in a telemedical environment to predict user disease states |
| US11915815B2 (en) | 2019-10-03 | 2024-02-27 | Rom Technologies, Inc. | System and method for using artificial intelligence and machine learning and generic risk factors to improve cardiovascular health such that the need for additional cardiac interventions is mitigated |
| US11923065B2 (en) | 2019-10-03 | 2024-03-05 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to detect abnormal heart rhythms of a user performing a treatment plan with an electromechanical machine |
| US11955222B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for determining, based on advanced metrics of actual performance of an electromechanical machine, medical procedure eligibility in order to ascertain survivability rates and measures of quality-of-life criteria |
| US11955223B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using artificial intelligence and machine learning to provide an enhanced user interface presenting data pertaining to cardiac health, bariatric health, pulmonary health, and/or cardio-oncologic health for the purpose of performing preventative actions |
| US11955221B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using AI/ML to generate treatment plans to stimulate preferred angiogenesis |
| US11955220B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using AI/ML and telemedicine for invasive surgical treatment to determine a cardiac treatment plan that uses an electromechanical machine |
| US11961603B2 (en) | 2019-10-03 | 2024-04-16 | Rom Technologies, Inc. | System and method for using AI ML and telemedicine to perform bariatric rehabilitation via an electromechanical machine |
| US12020800B2 (en) | 2019-10-03 | 2024-06-25 | Rom Technologies, Inc. | System and method for using AI/ML and telemedicine to integrate rehabilitation for a plurality of comorbid conditions |
| US12020799B2 (en) | 2019-10-03 | 2024-06-25 | Rom Technologies, Inc. | Rowing machines, systems including rowing machines, and methods for using rowing machines to perform treatment plans for rehabilitation |
| US12062425B2 (en) | 2019-10-03 | 2024-08-13 | Rom Technologies, Inc. | System and method for implementing a cardiac rehabilitation protocol by using artificial intelligence and standardized measurements |
| US12087426B2 (en) | 2019-10-03 | 2024-09-10 | Rom Technologies, Inc. | Systems and methods for using AI ML to predict, based on data analytics or big data, an optimal number or range of rehabilitation sessions for a user |
| US12176089B2 (en) | 2019-10-03 | 2024-12-24 | Rom Technologies, Inc. | System and method for using AI ML and telemedicine for cardio-oncologic rehabilitation via an electromechanical machine |
| US12176091B2 (en) | 2019-10-03 | 2024-12-24 | Rom Technologies, Inc. | Systems and methods for using elliptical machine to perform cardiovascular rehabilitation |
| US12186623B2 (en) | 2019-03-11 | 2025-01-07 | Rom Technologies, Inc. | Monitoring joint extension and flexion using a sensor device securable to an upper and lower limb |
| US12224052B2 (en) | 2019-10-03 | 2025-02-11 | Rom Technologies, Inc. | System and method for using AI, machine learning and telemedicine for long-term care via an electromechanical machine |
| US12230381B2 (en) | 2019-10-03 | 2025-02-18 | Rom Technologies, Inc. | System and method for an enhanced healthcare professional user interface displaying measurement information for a plurality of users |
| US12230382B2 (en) | 2019-10-03 | 2025-02-18 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to predict a probability of an undesired medical event occurring during a treatment plan |
| US12285654B2 (en) | 2019-05-10 | 2025-04-29 | Rom Technologies, Inc. | Method and system for using artificial intelligence to interact with a user of an exercise device during an exercise session |
| US12324961B2 (en) | 2019-05-10 | 2025-06-10 | Rom Technologies, Inc. | Method and system for using artificial intelligence to present a user interface representing a user's progress in various domains |
| US12347543B2 (en) | 2019-10-03 | 2025-07-01 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence to implement a cardio protocol via a relay-based system |
| US12380984B2 (en) | 2019-10-03 | 2025-08-05 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to generate treatment plans having dynamically tailored cardiac protocols for users to manage a state of an electromechanical machine |
| US12390689B2 (en) | 2019-10-21 | 2025-08-19 | Rom Technologies, Inc. | Persuasive motivation for orthopedic treatment |
| US12420143B1 (en) | 2019-10-03 | 2025-09-23 | Rom Technologies, Inc. | System and method for enabling residentially-based cardiac rehabilitation by using an electromechanical machine and educational content to mitigate risk factors and optimize user behavior |
- 2022
- 2022-06-10CNCN202210655535.7Apatent/CN114983761A/ennot_activeWithdrawn
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12186623B2 (en) | 2019-03-11 | 2025-01-07 | Rom Technologies, Inc. | Monitoring joint extension and flexion using a sensor device securable to an upper and lower limb |
| US12324961B2 (en) | 2019-05-10 | 2025-06-10 | Rom Technologies, Inc. | Method and system for using artificial intelligence to present a user interface representing a user's progress in various domains |
| US12285654B2 (en) | 2019-05-10 | 2025-04-29 | Rom Technologies, Inc. | Method and system for using artificial intelligence to interact with a user of an exercise device during an exercise session |
| US12087426B2 (en) | 2019-10-03 | 2024-09-10 | Rom Technologies, Inc. | Systems and methods for using AI ML to predict, based on data analytics or big data, an optimal number or range of rehabilitation sessions for a user |
| US12176091B2 (en) | 2019-10-03 | 2024-12-24 | Rom Technologies, Inc. | Systems and methods for using elliptical machine to perform cardiovascular rehabilitation |
| US11923065B2 (en) | 2019-10-03 | 2024-03-05 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to detect abnormal heart rhythms of a user performing a treatment plan with an electromechanical machine |
| US11955222B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for determining, based on advanced metrics of actual performance of an electromechanical machine, medical procedure eligibility in order to ascertain survivability rates and measures of quality-of-life criteria |
| US11955223B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using artificial intelligence and machine learning to provide an enhanced user interface presenting data pertaining to cardiac health, bariatric health, pulmonary health, and/or cardio-oncologic health for the purpose of performing preventative actions |
| US11955221B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using AI/ML to generate treatment plans to stimulate preferred angiogenesis |
| US11955220B2 (en) | 2019-10-03 | 2024-04-09 | Rom Technologies, Inc. | System and method for using AI/ML and telemedicine for invasive surgical treatment to determine a cardiac treatment plan that uses an electromechanical machine |
| US11961603B2 (en) | 2019-10-03 | 2024-04-16 | Rom Technologies, Inc. | System and method for using AI ML and telemedicine to perform bariatric rehabilitation via an electromechanical machine |
| US12020800B2 (en) | 2019-10-03 | 2024-06-25 | Rom Technologies, Inc. | System and method for using AI/ML and telemedicine to integrate rehabilitation for a plurality of comorbid conditions |
| US12020799B2 (en) | 2019-10-03 | 2024-06-25 | Rom Technologies, Inc. | Rowing machines, systems including rowing machines, and methods for using rowing machines to perform treatment plans for rehabilitation |
| US12062425B2 (en) | 2019-10-03 | 2024-08-13 | Rom Technologies, Inc. | System and method for implementing a cardiac rehabilitation protocol by using artificial intelligence and standardized measurements |
| US11756666B2 (en) | 2019-10-03 | 2023-09-12 | Rom Technologies, Inc. | Systems and methods to enable communication detection between devices and performance of a preventative action |
| US12176089B2 (en) | 2019-10-03 | 2024-12-24 | Rom Technologies, Inc. | System and method for using AI ML and telemedicine for cardio-oncologic rehabilitation via an electromechanical machine |
| US11915815B2 (en) | 2019-10-03 | 2024-02-27 | Rom Technologies, Inc. | System and method for using artificial intelligence and machine learning and generic risk factors to improve cardiovascular health such that the need for additional cardiac interventions is mitigated |
| US11915816B2 (en) | 2019-10-03 | 2024-02-27 | Rom Technologies, Inc. | Systems and methods of using artificial intelligence and machine learning in a telemedical environment to predict user disease states |
| US12224052B2 (en) | 2019-10-03 | 2025-02-11 | Rom Technologies, Inc. | System and method for using AI, machine learning and telemedicine for long-term care via an electromechanical machine |
| US12230381B2 (en) | 2019-10-03 | 2025-02-18 | Rom Technologies, Inc. | System and method for an enhanced healthcare professional user interface displaying measurement information for a plurality of users |
| US12230383B2 (en) | 2019-10-03 | 2025-02-18 | Rom Technologies, Inc. | United states systems and methods for using elliptical machine to perform cardiovascular rehabilitation |
| US12230382B2 (en) | 2019-10-03 | 2025-02-18 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to predict a probability of an undesired medical event occurring during a treatment plan |
| US11887717B2 (en) | 2019-10-03 | 2024-01-30 | Rom Technologies, Inc. | System and method for using AI, machine learning and telemedicine to perform pulmonary rehabilitation via an electromechanical machine |
| US11830601B2 (en) | 2019-10-03 | 2023-11-28 | Rom Technologies, Inc. | System and method for facilitating cardiac rehabilitation among eligible users |
| US12347543B2 (en) | 2019-10-03 | 2025-07-01 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence to implement a cardio protocol via a relay-based system |
| US12380984B2 (en) | 2019-10-03 | 2025-08-05 | Rom Technologies, Inc. | Systems and methods for using artificial intelligence and machine learning to generate treatment plans having dynamically tailored cardiac protocols for users to manage a state of an electromechanical machine |
| US12420143B1 (en) | 2019-10-03 | 2025-09-23 | Rom Technologies, Inc. | System and method for enabling residentially-based cardiac rehabilitation by using an electromechanical machine and educational content to mitigate risk factors and optimize user behavior |
| US12390689B2 (en) | 2019-10-21 | 2025-08-19 | Rom Technologies, Inc. | Persuasive motivation for orthopedic treatment |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114983761A (en) | Rehabilitation exercise device after interventional therapy in cardiology department | |
| CN109984918B (en) | An adjustable knee joint rehabilitation device with massage function | |
| CN113663289B (en) | Orthopedic patient shank rehabilitation training is with trampling ware | |
| CN110974601A (en) | Rehabilitation Exercise Device for Interventional Nursing | |
| CN110916975A (en) | A special rehabilitation exercise device for orthopedics | |
| CN112972204A (en) | Pain relieving device for knee arthritis patient | |
| CN210991579U (en) | A sports medicine knee joint care activity device | |
| CN208081471U (en) | A kind of lower limb rehabilitation training device | |
| CN114376888A (en) | A kind of rehabilitation nursing equipment for thoracic surgery | |
| CN112618271A (en) | Medical lower limb rehabilitation exercise device for severe patients | |
| CN109984919A (en) | A kind of knee joint rehabilitation device | |
| CN213100650U (en) | Rheumatism arthritis motion rehabilitation device | |
| CN113693883A (en) | Medical lower limb rehabilitation exercise device for severe patients | |
| CN115054450B (en) | Intelligent lower limb rehabilitation training device | |
| CN215607380U (en) | Pediatric clinical rehabilitation device with leg exercise function | |
| CN221731439U (en) | Postoperative exercise device | |
| CN113877141B (en) | Rehabilitation device after breast surgery | |
| CN220801813U (en) | Rehabilitation nursing frame for coronary heart disease patient | |
| CN114831869A (en) | Cardiovascular interventional therapy device | |
| CN220632515U (en) | An adjustable ankle pump exercise device | |
| CN221691777U (en) | A rehabilitation nursing device for postoperative thoracic surgery | |
| CN215840337U (en) | A foot massage device for diabetic foot patients | |
| CN214806510U (en) | Bed training rehabilitation device for cardiology department postoperative patient | |
| CN221490630U (en) | Gait disorder rehabilitation training device | |
| CN221578687U (en) | A spinal surgery lumbar vertebra training device with adjustable straps |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication | ||
| WW01 | Invention patent application withdrawn after publication | Application publication date:20220902 |