CN114929137A - Control program adjustment based on device status and user input - Google Patents
Control program adjustment based on device status and user inputDownload PDFInfo
- Publication number
- CN114929137A CN114929137ACN202080091258.0ACN202080091258ACN114929137ACN 114929137 ACN114929137 ACN 114929137ACN 202080091258 ACN202080091258 ACN 202080091258ACN 114929137 ACN114929137 ACN 114929137A
- Authority
- CN
- China
- Prior art keywords
- surgical
- end effector
- surgical instrument
- jaw
- tissue
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000012636effectorSubstances0.000claimsabstractdescription278
- 230000004044responseEffects0.000claimsabstractdescription36
- 238000005259measurementMethods0.000claimsdescription7
- 210000001519tissueAnatomy0.000description286
- 238000001356surgical procedureMethods0.000description73
- 238000000034methodMethods0.000description45
- 230000006870functionEffects0.000description44
- 238000004891communicationMethods0.000description36
- 238000000605extractionMethods0.000description34
- 239000000779smokeSubstances0.000description31
- 238000005520cutting processMethods0.000description24
- 239000003517fumeSubstances0.000description21
- 238000010586diagramMethods0.000description18
- 238000003860storageMethods0.000description18
- 230000007423decreaseEffects0.000description13
- 238000001514detection methodMethods0.000description13
- 230000033001locomotionEffects0.000description13
- 238000002560therapeutic procedureMethods0.000description13
- 230000004913activationEffects0.000description11
- 230000008859changeEffects0.000description10
- 230000006835compressionEffects0.000description10
- 238000007906compressionMethods0.000description10
- 238000004422calculation algorithmMethods0.000description9
- 238000002955isolationMethods0.000description8
- 239000000463materialSubstances0.000description8
- 238000012545processingMethods0.000description8
- 230000006378damageEffects0.000description7
- 230000014509gene expressionEffects0.000description7
- 238000012986modificationMethods0.000description7
- 230000004048modificationEffects0.000description7
- 230000000712assemblyEffects0.000description6
- 238000000429assemblyMethods0.000description6
- 238000004364calculation methodMethods0.000description6
- 238000007789sealingMethods0.000description6
- 230000000007visual effectEffects0.000description6
- 238000002360preparation methodMethods0.000description5
- 230000015271coagulationEffects0.000description4
- 238000005345coagulationMethods0.000description4
- 238000004590computer programMethods0.000description4
- 230000003993interactionEffects0.000description4
- 210000002977intracellular fluidAnatomy0.000description4
- 230000007246mechanismEffects0.000description4
- SYHGEUNFJIGTRX-UHFFFAOYSA-NmethylenedioxypyrovaleroneChemical compoundC=1C=C2OCOC2=CC=1C(=O)C(CCC)N1CCCC1SYHGEUNFJIGTRX-UHFFFAOYSA-N0.000description4
- 230000008569processEffects0.000description4
- 230000000451tissue damageEffects0.000description4
- 231100000827tissue damageToxicity0.000description4
- 230000007704transitionEffects0.000description4
- 208000027418Wounds and injuryDiseases0.000description3
- 238000004458analytical methodMethods0.000description3
- 238000010276constructionMethods0.000description3
- 238000011109contaminationMethods0.000description3
- 238000002224dissectionMethods0.000description3
- 238000004520electroporationMethods0.000description3
- 210000003722extracellular fluidAnatomy0.000description3
- 208000014674injuryDiseases0.000description3
- 230000002427irreversible effectEffects0.000description3
- 230000003287optical effectEffects0.000description3
- 238000004806packaging method and processMethods0.000description3
- 230000002829reductive effectEffects0.000description3
- 230000002441reversible effectEffects0.000description3
- 238000006467substitution reactionMethods0.000description3
- 238000012546transferMethods0.000description3
- 238000002604ultrasonographyMethods0.000description3
- 230000003044adaptive effectEffects0.000description2
- 230000002776aggregationEffects0.000description2
- 238000004220aggregationMethods0.000description2
- 238000013459approachMethods0.000description2
- 238000003491arrayMethods0.000description2
- 238000013473artificial intelligenceMethods0.000description2
- 230000006399behaviorEffects0.000description2
- 230000008901benefitEffects0.000description2
- 230000005540biological transmissionEffects0.000description2
- 210000004027cellAnatomy0.000description2
- 230000001010compromised effectEffects0.000description2
- 230000003247decreasing effectEffects0.000description2
- 230000000694effectsEffects0.000description2
- 238000010304firingMethods0.000description2
- 238000003780insertionMethods0.000description2
- 230000037431insertionEffects0.000description2
- 238000010801machine learningMethods0.000description2
- 238000004519manufacturing processMethods0.000description2
- 239000000203mixtureSubstances0.000description2
- 238000012544monitoring processMethods0.000description2
- 239000013589supplementSubstances0.000description2
- 206010002091AnaesthesiaDiseases0.000description1
- HBBGRARXTFLTSG-UHFFFAOYSA-NLithium ionChemical compound[Li+]HBBGRARXTFLTSG-UHFFFAOYSA-N0.000description1
- 210000001015abdomenAnatomy0.000description1
- 210000003815abdominal wallAnatomy0.000description1
- 230000009471actionEffects0.000description1
- 230000002411adverseEffects0.000description1
- 230000004075alterationEffects0.000description1
- 230000003321amplificationEffects0.000description1
- 230000037005anaesthesiaEffects0.000description1
- 210000003484anatomyAnatomy0.000description1
- 230000009118appropriate responseEffects0.000description1
- 210000004204blood vesselAnatomy0.000description1
- 239000003990capacitorSubstances0.000description1
- 230000005779cell damageEffects0.000description1
- 238000004140cleaningMethods0.000description1
- 230000001143conditioned effectEffects0.000description1
- 230000003750conditioning effectEffects0.000description1
- 239000004020conductorSubstances0.000description1
- 230000008878couplingEffects0.000description1
- 238000010168coupling processMethods0.000description1
- 238000005859coupling reactionMethods0.000description1
- 238000012517data analyticsMethods0.000description1
- 238000013480data collectionMethods0.000description1
- 230000002950deficientEffects0.000description1
- 238000013461designMethods0.000description1
- 230000009977dual effectEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 230000007613environmental effectEffects0.000description1
- 210000003746featherAnatomy0.000description1
- 239000012530fluidSubstances0.000description1
- 238000000227grindingMethods0.000description1
- 230000002439hemostatic effectEffects0.000description1
- 230000006872improvementEffects0.000description1
- 230000000977initiatory effectEffects0.000description1
- 230000003834intracellular effectEffects0.000description1
- 238000012830laparoscopic surgical procedureMethods0.000description1
- 230000000670limiting effectEffects0.000description1
- 229910001416lithium ionInorganic materials0.000description1
- PWPJGUXAGUPAHP-UHFFFAOYSA-NlufenuronChemical compoundC1=C(Cl)C(OC(F)(F)C(C(F)(F)F)F)=CC(Cl)=C1NC(=O)NC(=O)C1=C(F)C=CC=C1FPWPJGUXAGUPAHP-UHFFFAOYSA-N0.000description1
- 230000007257malfunctionEffects0.000description1
- 239000003607modifierSubstances0.000description1
- 238000003199nucleic acid amplification methodMethods0.000description1
- 238000011017operating methodMethods0.000description1
- 230000005693optoelectronicsEffects0.000description1
- 210000000056organAnatomy0.000description1
- 230000008520organizationEffects0.000description1
- 230000003071parasitic effectEffects0.000description1
- 210000004738parenchymal cellAnatomy0.000description1
- 239000002245particleSubstances0.000description1
- 238000005192partitionMethods0.000description1
- 230000037361pathwayEffects0.000description1
- 230000000644propagated effectEffects0.000description1
- 239000000523sampleSubstances0.000description1
- 238000012163sequencing techniqueMethods0.000description1
- 230000000153supplemental effectEffects0.000description1
- 238000010792warmingMethods0.000description1
- 238000004804windingMethods0.000description1
Images



























Landscapes
- Surgical Instruments (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese相关申请的交叉引用CROSS-REFERENCE TO RELATED APPLICATIONS
本非临时申请按照美国法典第35卷第119条(e)款的规定要求2019年12月30日提交的名称为“DEVICES AND SYSTEMS FOR ELECTROSURGERY”的美国临时专利申请序列号62/955,299的权益,该申请的公开内容全文以引用方式并入本文。This non-provisional application claims the benefit of U.S. Provisional Patent Application Serial No. 62/955,299, filed on December 30, 2019, entitled "DEVICES AND SYSTEMS FOR ELECTROSURGERY," pursuant to 35 U.S.C. § 119(e), The disclosure of this application is incorporated herein by reference in its entirety.
背景技术Background technique
本发明涉及设计成处理组织的外科器械,包括但不限于被配置成能够切割和紧固组织的外科器械。外科器械可以包括由发生器供应功率的电外科器械,以在外科手术期间中实现组织解剖、切割和/或凝结。外科器械可以包括被配置成能够切割组织并使用外科钉和/或紧固件来缝合组织的器械。外科器械可以被配置成能够用于开放式外科手术,但还可以应用于其他类型的外科手术诸如腹腔镜式、内窥镜式和机器人辅助的手术,并且可以包括能够相对于器械的轴部分进行关节运动以有利于在患者体内精确定位的端部执行器。The present invention relates to surgical instruments designed to treat tissue, including but not limited to surgical instruments configured to cut and secure tissue. Surgical instruments may include electrosurgical instruments powered by generators to effect tissue dissection, cutting and/or coagulation during surgical procedures. Surgical instruments may include instruments configured to cut tissue and staple the tissue using surgical staples and/or fasteners. Surgical instruments may be configured for open surgery, but may also be applied to other types of surgery such as laparoscopic, endoscopic, and robotic-assisted procedures, and may include components capable of being performed relative to a shaft portion of the instrument An end effector that articulates to facilitate precise positioning within the patient.
发明内容SUMMARY OF THE INVENTION
在各种实施方案中,公开了一种外科系统,该外科系统包括外科器械、被配置成能够向端部执行器供应功率的发生器和被配置成能够运行控制程序以操作该外科系统的处理器。该外科器械包括该端部执行器,该端部执行器包括第一钳口和第二钳口。该第一钳口和该第二钳口中的至少一者相对于彼此在打开位置和闭合位置之间运动。组织被配置成能够位于该第一钳口与该第二钳口之间。该处理器被配置成能够:检测该外科系统的第一参数,检测至少一个用户输入,并且响应于该检测到的第一参数和该至少一个用户输入而修改该控制程序。In various embodiments, a surgical system is disclosed that includes a surgical instrument, a generator configured to supply power to an end effector, and a process configured to execute a control program to operate the surgical system device. The surgical instrument includes the end effector including a first jaw and a second jaw. At least one of the first jaw and the second jaw moves relative to each other between an open position and a closed position. Tissue is configured to be positioned between the first jaw and the second jaw. The processor is configured to: detect a first parameter of the surgical system, detect at least one user input, and modify the control program in response to the detected first parameter and the at least one user input.
在各种实施方案中,公开了一种外科系统,该外科系统包括外科器械、被配置成能够向该外科器械供应功率的发生器和被配置成能够运行控制程序以操作该外科系统的处理器。该处理器被配置成能够:检测该外科器械的状态,检测至少一个用户输入,并且响应于该检测到的外科器械的状态和该至少一个用户输入而调整该控制程序。In various embodiments, a surgical system is disclosed that includes a surgical instrument, a generator configured to supply power to the surgical instrument, and a processor configured to execute a control program to operate the surgical system . The processor is configured to: detect the state of the surgical instrument, detect at least one user input, and adjust the control program in response to the detected state of the surgical instrument and the at least one user input.
在各种实施方案中,公开了一种外科系统,该外科系统包括外科器械、被配置成能够向端部执行器供应功率的发生器和被配置成能够运行控制程序以操作该外科系统的处理器。该外科器械包括该端部执行器,该端部执行器包括第一钳口和第二钳口。该第一钳口和该第二钳口中的至少一者相对于彼此在打开位置和闭合位置之间运动。组织被配置成能够位于该第一钳口与该第二钳口之间。该处理器被配置成能够:检测该外科器械的第一参数,检测该发生器的第二参数,检测至少一个用户输入,并且响应于检测到的第一参数、检测到的第二参数和该至少一个用户输入而修改该控制程序。In various embodiments, a surgical system is disclosed that includes a surgical instrument, a generator configured to supply power to an end effector, and a process configured to execute a control program to operate the surgical system device. The surgical instrument includes the end effector including a first jaw and a second jaw. At least one of the first jaw and the second jaw moves relative to each other between an open position and a closed position. Tissue is configured to be positioned between the first jaw and the second jaw. The processor is configured to: detect a first parameter of the surgical instrument, detect a second parameter of the generator, detect at least one user input, and be responsive to the detected first parameter, the detected second parameter and the At least one user input modifies the control program.
附图说明Description of drawings
各种方面的新型特征在随附权利要求书中具体阐述。然而,关于组织和操作方法两者的所述方面可通过结合附图参照以下描述最好地理解,其中:The novel features of the various aspects are set forth with particularity in the appended claims. However, the described aspects regarding both organization and methods of operation can be best understood by reference to the following description in conjunction with the accompanying drawings, wherein:
图1示出了根据本公开的至少一个方面的与外科系统一起使用的发生器的示例;1 illustrates an example of a generator for use with a surgical system in accordance with at least one aspect of the present disclosure;
图2示出了根据本公开的至少一个方面的外科系统的一种形式,该外科系统包括发生器和可以与该发生器一起使用的电外科器械;2 illustrates one form of a surgical system including a generator and an electrosurgical instrument that can be used with the generator in accordance with at least one aspect of the present disclosure;
图3示出了根据本公开的至少一个方面的外科器械或工具的框图;3 shows a block diagram of a surgical instrument or tool in accordance with at least one aspect of the present disclosure;
图4是根据至少一个实施方案的外科系统的透视图,该外科系统包括外科器械和显示监视器,其中该外科器械包括显示屏;4 is a perspective view of a surgical system including a surgical instrument and a display monitor, wherein the surgical instrument includes a display screen, according to at least one embodiment;
图5是根据至少一个实施方案的图4的外科器械的显示屏和显示监视器的对应视图的示意图;5 is a schematic diagram of corresponding views of a display screen and a display monitor of the surgical instrument of FIG. 4, according to at least one embodiment;
图6是根据至少一个实施方案的图4的外科器械的显示屏和显示监视器的对应视图的示意图;6 is a schematic diagram of corresponding views of a display screen and a display monitor of the surgical instrument of FIG. 4, according to at least one embodiment;
图7是根据至少一个实施方案的图4的外科器械的显示屏和显示监视器的对应视图的示意图;7 is a schematic diagram of corresponding views of a display screen and a display monitor of the surgical instrument of FIG. 4, according to at least one embodiment;
图8是根据至少一个实施方案的图4的外科器械的显示屏和显示监视器的对应视图的示意图;8 is a schematic diagram of corresponding views of a display screen and a display monitor of the surgical instrument of FIG. 4, according to at least one embodiment;
图9是根据至少一个实施方案的图4的外科器械的显示屏和显示监视器的对应视图的示意图;9 is a schematic diagram of corresponding views of a display screen and display monitor of the surgical instrument of FIG. 4, according to at least one embodiment;
图10是根据至少一个实施方案的由外科系统的一个或多个发生器递送的总有效能量与来自排烟器的马达的占空比之间的关系的图像描绘;10 is a graphical depiction of the relationship between total effective energy delivered by one or more generators of a surgical system and duty cycle from a motor of a smoke evacuator, according to at least one embodiment;
图11是根据至少一个实施方案的外科系统的示意图,该外科系统包括外科集线器、由多个发生器供应功率的组合电外科器械、排烟系统和显示器;11 is a schematic diagram of a surgical system including a surgical hub, a combined electrosurgical instrument powered by multiple generators, a smoke extraction system, and a display, according to at least one embodiment;
图12是根据至少一个实施方案的由外科系统的一个或多个发生器随时间提供的功率与经处理的组织随时间的阻抗之间的关系的图像描绘;12 is a graphical depiction of the relationship between power provided by one or more generators of a surgical system over time and impedance of treated tissue over time, according to at least one embodiment;
图13是根据至少一个实施方案的与外科系统的通信路径的示意图,其中该外科系统包括外科集线器、排烟装置、外科器械、被配置成能够向该外科器械的第一操作供应功率的第一发生器,以及被配置成能够向该外科器械的第二操作供应功率的第二发生器;13 is a schematic diagram of a communication path with a surgical system, wherein the surgical system includes a surgical hub, a smoke extraction device, a surgical instrument, a first device configured to supply power to a first operation of the surgical instrument, according to at least one embodiment a generator, and a second generator configured to supply power to a second operation of the surgical instrument;
图14是根据至少一个实施方案的外科系统的示意图,该外科系统包括外科集线器和被配置成能够在其上接收工具的多个机器人臂,其中该外科系统包括认证模块,该认证模块被配置成能够准许这些工具附接到外科系统和/或与该外科系统一起使用;14 is a schematic diagram of a surgical system including a surgical hub and a plurality of robotic arms configured to receive tools thereon, wherein the surgical system includes an authentication module configured to Ability to permit these tools to be attached to and/or used with a surgical system;
图15是根据至少一个实施方案的位于治疗室内的外科系统的示意图;15 is a schematic diagram of a surgical system located in a treatment room, according to at least one embodiment;
图16是根据至少一个实施方案的描绘外科器械在外科手术的各个阶段的各种操作参数和/或规格的图表;16 is a graph depicting various operating parameters and/or specifications of a surgical instrument at various stages of a surgical procedure, according to at least one embodiment;
图17是图16的被示出为在第一时间向患者组织递送双极能量的外科器械的正视图;17 is a front view of the surgical instrument of FIG. 16 shown delivering bipolar energy to patient tissue at a first time;
图18是图16的被示出为在第二时间向患者组织递送双极和单极能量的外科器械的正视图;18 is a front view of the surgical instrument of FIG. 16 shown delivering bipolar and monopolar energy to patient tissue at a second time;
图19是图16的被示出为在第四时间向患者组织递送单极能量的外科器械的正视图;19 is a front view of the surgical instrument of FIG. 16 shown delivering monopolar energy to patient tissue at a fourth time;
图20是图16的外科器械在外科手术的各个阶段的各种操作参数和/或规格的图形表示;20 is a graphical representation of various operating parameters and/or specifications of the surgical instrument of FIG. 16 at various stages of a surgical procedure;
图21是根据至少一个实施方案的在外科手术的持续时间内测量的组织阻抗的图形表示;Figure 21 is a graphical representation of tissue impedance measured over the duration of a surgical procedure, according to at least one embodiment;
图22是根据至少一个实施方案的表示应变计算的示意图,其中使用当端部执行器处于打开构型时在端部执行器的钳口之间限定的间隙来计算施加的应变;22 is a schematic diagram representing a strain calculation in which the applied strain is calculated using the gap defined between the jaws of the end effector when the end effector is in an open configuration, according to at least one embodiment;
图23是表示图22的应变计算的示意图,其中当患者组织不与端部执行器的钳口接触或不位于端部执行器的钳口之间时,所计算的施加应变超过实际的施加应变;23 is a schematic diagram representing the strain calculation of FIG. 22 in which the calculated applied strain exceeds the actual applied strain when the patient tissue is not in contact with or between the jaws of the end effector ;
图24是根据至少一个实施方案的表示组织阻抗计算的示意图,其中使用当端部执行器的钳口接触位于其间的患者组织时在端部执行器的钳口之间限定的间隙来计算组织阻抗;24 is a schematic diagram representing tissue impedance calculations using the gap defined between the jaws of an end effector when the jaws of the end effector contact patient tissue therebetween, according to at least one embodiment to calculate tissue impedance ;
图25是根据至少一个实施方案的马达电流与钳口间隙之间随时间的关系的图形表示;25 is a graphical representation of the relationship between motor current and jaw gap over time, according to at least one embodiment;
图26是根据至少一个实施方案的网络的示意图,该网络由外科器械和基于云的存储介质形成;26 is a schematic diagram of a network formed of surgical instruments and cloud-based storage media, according to at least one embodiment;
图27是根据图26的网络确定的钳口间隙的变化与钳口马达夹紧电流之间的关系的图形表示;Figure 27 is a graphical representation of the relationship between change in jaw gap and jaw motor clamping current determined from the network of Figure 26;
图28是根据图26的网络确定的发生器功率与时间之间的关系的图形表示;Figure 28 is a graphical representation of the relationship between generator power and time determined from the network of Figure 26;
图29是根据至少一个实施方案的外科器械的激活周期与当该外科器械的端部执行器处于闭合构型并且没有患者组织位于其间时测量的阻抗之间的关系的图形表示;29 is a graphical representation of the relationship between an activation period of a surgical instrument and impedance measured when the end effector of the surgical instrument is in a closed configuration with no patient tissue therebetween, according to at least one embodiment;
图30是根据至少一个实施方案的在钳口夹紧行程期间组织电导率、钳口孔尺寸与钳口马达力之间的关系的图形表示;并且30 is a graphical representation of the relationship between tissue conductivity, jaw hole size, and jaw motor force during a jaw clamping stroke, according to at least one embodiment; and
图31是根据至少一个实施方案的基于用户输入的钳口闭合速度以及基于该用户输入和监测的参数的钳口闭合速度的图形表示。31 is a graphical representation of jaw closure speed based on user input and jaw closure speed based on the user input and monitored parameters, according to at least one embodiment.
具体实施方式Detailed ways
本申请的申请人拥有与本申请于同一日期提交且各自全文以引用方式并入本文的以下美国专利申请:The applicant of the present application has the following US patent applications filed on the same date as the present application and each of which is incorporated herein by reference in its entirety:
·代理人案卷号END9234USNP1/190717-1M,其名称为“METHOD FOR ANELECTROSURGICAL PROCEDURE”;·Attorney's file number END9234USNP1/190717-1M, its name is "METHOD FOR ANELECTROSURGICAL PROCEDURE";
·代理人案卷号END9234USNP2/190717-2,其名称为“ARTICULATABLE SURGICALINSTRUMENT”;·Attorney's file number END9234USNP2/190717-2, its name is "ARTICULATABLE SURGICALINSTRUMENT";
·代理人案卷号END9234USNP3/190717-3,其名称为“SURGICAL INSTRUMENT WITHJAW ALIGNMENT FEATURES”;·Attorney's file number END9234USNP3/190717-3, its name is "SURGICAL INSTRUMENT WITHJAW ALIGNMENT FEATURES";
·代理人案卷号END9234USNP4/190717-4,其名称为“SURGICAL INSTRUMENT WITHROTATABLE AND ARTICULATABLE SURGICAL END EFFECTOR”;·Attorney's file number END9234USNP4/190717-4, its name is "SURGICAL INSTRUMENT WITHROTATABLE AND ARTICULATABLE SURGICAL END EFFECTOR";
·代理人案卷号END9234USNP5/190717-5,其名称为“ELECTROSURGICALINSTRUMENT WITH ASYNCHRONOUS ENERGIZING ELECTRODES”;·Attorney's file number END9234USNP5/190717-5, its name is "ELECTROSURGICALINSTRUMENT WITH ASYNCHRONOUS ENERGIZING ELECTRODES";
·代理人案卷号END9234USNP6/190717-6,其名称为“ELECTROSURGICALINSTRUMENT WITH ELECTRODES BIASING SUPPORT”;·Attorney's file number END9234USNP6/190717-6, its name is "ELECTROSURGICALINSTRUMENT WITH ELECTRODES BIASING SUPPORT";
·代理人案卷号END9234USNP7/190717-7,其名称为“ELECTROSURGICALINSTRUMENT WITH FLEXIBLE WIRING ASSEMBLIES”;·Attorney's file number END9234USNP7/190717-7, its name is "ELECTROSURGICALINSTRUMENT WITH FLEXIBLE WIRING ASSEMBLIES";
·代理人案卷号END9234USNP8/190717-8,其名称为“ELECTROSURGICALINSTRUMENT WITH VARIABLE CONTROL MECHANISMS”;·Attorney's file number END9234USNP8/190717-8, its name is "ELECTROSURGICALINSTRUMENT WITH VARIABLE CONTROL MECHANISMS";
·代理人案卷号END9234USNP9/190717-9,其名称为“ELECTROSURGICAL SYSTEMSWITH INTEGRATED AND EXTERNAL POWER SOURCES”;·Attorney's file number END9234USNP9/190717-9, its name is "ELECTROSURGICAL SYSTEMSWITH INTEGRATED AND EXTERNAL POWER SOURCES";
·代理人案卷号END9234USNP10/190717-10,其名称为“ELECTROSURGICALINSTRUMENTS WITH ELECTRODES HAVING ENERGY FOCUSING FEATURES”;·Attorney's file number END9234USNP10/190717-10, its name is "ELECTROSURGICALINSTRUMENTS WITH ELECTRODES HAVING ENERGY FOCUSING FEATURES";
·代理人案卷号END9234USNP11/190717-11,其名称为“ELECTROSURGICALINSTRUMENTS WITH ELECTRODES HAVING VARIABLE ENERGY DENSITIES”;·Attorney's file number END9234USNP11/190717-11, its name is "ELECTROSURGICALINSTRUMENTS WITH ELECTRODES HAVING VARIABLE ENERGY DENSITIES";
·代理人案卷号END9234USNP12/190717-12,其名称为“ELECTROSURGICALINSTRUMENT WITH MONOPOLAR AND BIPOLAR ENERGY CAPABILITIES”;·Attorney's file number END9234USNP12/190717-12, its name is "ELECTROSURGICALINSTRUMENT WITH MONOPOLAR AND BIPOLAR ENERGY CAPABILITIES";
·代理人案卷号END9234USNP13/190717-13,其名称为“ELECTROSURGICAL ENDEFFECTORS WITH THERMALLY INSULATIVE AND THERMALLY CONDUCTIVE PORTIONS”;·Attorney's file number END9234USNP13/190717-13, its name is "ELECTROSURGICAL ENDEFECTORS WITH THERMALLY INSULATIVE AND THERMALLY CONDUCTIVE PORTIONS";
·代理人案卷号END9234USNP14/190717-14,其名称为“ELECTROSURGICALINSTRUMENT WITH ELECTRODES OPERABLE IN BIPOLAR AND MONOPOLAR MODES”;·Attorney's file number END9234USNP14/190717-14, its name is "ELECTROSURGICALINSTRUMENT WITH ELECTRODES OPERABLE IN BIPOLAR AND MONOPOLAR MODES";
·代理人案卷号END9234USNP15/190717-15,其名称为“ELECTROSURGICALINSTRUMENT FOR DELIVERING BLENDED ENERGY MODALITIES TO TISSUE”;·Attorney's file number END9234USNP15/190717-15, its name is "ELECTROSURGICALINSTRUMENT FOR DELIVERING BLENDED ENERGY MODALITIES TO TISSUE";
·代理人案卷号END9234USNP17/190717-17,其名称为“CONTROL PROGRAM FORMODULAR COMBINATION ENERGY DEVICE”;以及Attorney Docket No. END9234USNP17/190717-17, which is entitled "CONTROL PROGRAM FORMODULAR COMBINATION ENERGY DEVICE"; and
·代理人案卷号END9234USNP18/190717-18,其名称为“SURGICAL SYSTEMCOMMUNICATION PATHWAYS”。· Attorney's file number END9234USNP18/190717-18, its name is "SURGICAL SYSTEMCOMMUNICATION PATHWAYS".
本申请的申请人拥有于2019年12月30日提交的以下美国临时专利申请,这些临时专利申请中的每篇临时专利申请的公开内容全文以引用方式并入本文:The applicant of the present application has the following U.S. provisional patent applications filed on December 30, 2019, the disclosures of each of these provisional patent applications are hereby incorporated by reference in their entirety:
·美国临时专利申请序列号62/955,294,其名称为“USER INTERFACE FORSURGICAL INSTRUMENT WITH COMBINATION ENERGY MODALITY END-EFFECTOR”;U.S. Provisional Patent Application Serial No. 62/955,294, entitled "USER INTERFACE FORSURGICAL INSTRUMENT WITH COMBINATION ENERGY MODALITY END-EFFECTOR";
·美国临时专利申请序列号62/955,292,其名称为“COMBINATION ENERGYMODALITY END-EFFECTOR”;以及U.S. Provisional Patent Application Serial No. 62/955,292 entitled "COMBINATION ENERGYMODALITY END-EFFECTOR"; and
·美国临时专利申请序列号62/955,306,其名称为“SURGICAL INSTRUMENTSYSTEMS”。- US Provisional Patent Application Serial No. 62/955,306 entitled "SURGICAL INSTRUMENT SYSTEMS".
本申请的申请人拥有以下美国专利申请,这些专利申请中的每篇专利申请的公开内容全文以引用方式并入本文:The applicant of the present application owns the following US patent applications, the disclosures of each of which are incorporated herein by reference in their entirety:
·美国专利申请序列号16/209,395,其名称为“METHOD OF HUB COMMUNICATION”,现为美国专利申请公开号2019/0201136;U.S. Patent Application Serial No. 16/209,395, entitled "METHOD OF HUB COMMUNICATION", now U.S. Patent Application Publication No. 2019/0201136;
·美国专利申请序列号16/209,403,其名称为“METHOD OF CLOUD BASED DATAANALYTICS FOR USE WITH THE HUB”,现为美国专利申请公开号2019/0206569;U.S. Patent Application Serial No. 16/209,403, titled "METHOD OF CLOUD BASED DATAANALYTICS FOR USE WITH THE HUB", now U.S. Patent Application Publication No. 2019/0206569;
·美国专利申请序列号16/209,407,其名称为“METHOD OF ROBOTIC HUBCOMMUNICATION,DETECTION,AND CONTROL”,现为美国专利申请公开号2019/0201137;U.S. Patent Application Serial No. 16/209,407, titled "METHOD OF ROBOTIC HUBCOMMUNICATION, DETECTION, AND CONTROL", now U.S. Patent Application Publication No. 2019/0201137;
·美国专利申请序列号16/209,416,其名称为“METHOD OF HUB COMMUNICATION,PROCESSING,DISPLAY,AND CLOUD ANALYTICS”,现为美国专利申请公开号2019/0206562;U.S. Patent Application Serial No. 16/209,416, entitled "METHOD OF HUB COMMUNICATION, PROCESSING, DISPLAY, AND CLOUD ANALYTICS", now U.S. Patent Application Publication No. 2019/0206562;
·美国专利申请序列号16/209,423,其名称为“METHOD OF COMPRESSING TISSUEWITHIN A STAPLING DEVICE AND SIMULTANEOUSLY DISPLAYING THE LOCATION OF THETISSUE WITHIN THE JAWS”,现为美国专利申请公开号2019/0200981;U.S. Patent Application Serial No. 16/209,423, titled "METHOD OF COMPRESSING TISSUEWITHIN A STAPLING DEVICE AND SIMULTANEOUSLY DISPLAYING THE LOCATION OF THETISSUE WITHIN THE JAWS", now U.S. Patent Application Publication No. 2019/0200981;
·美国专利申请序列号16/209,427,其名称为“METHOD OF USING REINFORCEDFLEXIBLE CIRCUITS WITH MULTIPLE SENSORS TO OPTIMIZE PERFORMANCE OF RADIOFREQUENCY DEVICES”,现为美国专利申请公开号2019/0208641;U.S. Patent Application Serial No. 16/209,427, entitled "METHOD OF USING REINFORCEDFLEXIBLE CIRCUITS WITH MULTIPLE SENSORS TO OPTIMIZE PERFORMANCE OF RADIOFREQUENCY DEVICES", now U.S. Patent Application Publication No. 2019/0208641;
·美国专利申请序列号16/209,433,其名称为“METHOD OF SENSING PARTICULATEFROM SMOKE EVACUATED FROM A PATIENT,ADJUSTING THE PUMP SPEED BASED ON THESENSED INFORMATION,AND COMMUNICATING THE FUNCTIONAL PARAMETERS OF THE SYSTEMTO THE HUB”,现为美国专利申请公开号2019/0201594;U.S. Patent Application Serial No. 16/209,433, entitled "METHOD OF SENSING PARTICULATEFROM SMOKE EVACUATED FROM A PATIENT, ADJUSTING THE PUMP SPEED BASED ON THESENSED INFORMATION, AND COMMUNICATING THE FUNCTIONAL PARAMETERS OF THE SYSTEMTO THE HUB", now a U.S. patent application Publication No. 2019/0201594;
·美国专利申请序列号16/209,447,其名称为“METHOD FOR SMOKE EVACUATIONFOR SURGICAL HUB”,现为美国专利申请公开号2019/0201045;U.S. Patent Application Serial No. 16/209,447, titled "METHOD FOR SMOKE EVACUATIONFOR SURGICAL HUB", now U.S. Patent Application Publication No. 2019/0201045;
·美国专利申请序列号16/209,453,其名称为“METHOD FOR CONTROLLING SMARTENERGY DEVICES”,现为美国专利申请公开号2019/0201046;U.S. Patent Application Serial No. 16/209,453, entitled "METHOD FOR CONTROLLING SMARTENERGY DEVICES", now U.S. Patent Application Publication No. 2019/0201046;
·美国专利申请序列号16/209,458,其名称为“METHOD FOR SMART ENERGYDEVICE INFRASTRUCTURE”,现为美国专利申请公开号2019/0201047;U.S. Patent Application Serial No. 16/209,458, entitled "METHOD FOR SMART ENERGYDEVICE INFRASTRUCTURE", now U.S. Patent Application Publication No. 2019/0201047;
·美国专利申请序列号16/209,465,其名称为“METHOD FOR ADAPTIVE CONTROLSCHEMES FOR SURGICAL NETWORK CONTROL AND INTERACTION”,现为美国专利申请公开号2019/0206563;U.S. Patent Application Serial No. 16/209,465, entitled "METHOD FOR ADAPTIVE CONTROLSCHEMES FOR SURGICAL NETWORK CONTROL AND INTERACTION", now U.S. Patent Application Publication No. 2019/0206563;
·美国专利申请序列号16/209,478,其名称为“METHOD FOR SITUATIONALAWARENESS FOR SURGICAL NETWORK OR SURGICAL NETWORK CONNECTED DEVICE CAPABLEOF ADJUSTING FUNCTION BASED ON A SENSED SITUATION OR USAGE”,现为美国专利申请公开号2019/0104919;U.S. Patent Application Serial No. 16/209,478, entitled "METHOD FOR SITUATIONALAWARENESS FOR SURGICAL NETWORK OR SURGICAL NETWORK CONNECTED DEVICE CAPABLEOF ADJUSTING FUNCTION BASED ON A SENSED SITUATION OR USAGE", now U.S. Patent Application Publication No. 2019/0104919;
·美国专利申请序列号16/209,490,其名称为“METHOD FOR FACILITY DATACOLLECTION AND INTERPRETATION”,现为美国专利申请公开号2019/0206564;U.S. Patent Application Serial No. 16/209,490, entitled "METHOD FOR FACILITY DATACOLLECTION AND INTERPRETATION", now U.S. Patent Application Publication No. 2019/0206564;
·美国专利申请序列号16/209,491,其名称为“METHOD FOR CIRCULAR STAPLERCONTROL ALGORITHM ADJUSTMENT BASED ON SITUATIONAL AWARENESS”,现为美国专利申请公开号2019/0200998;U.S. Patent Application Serial No. 16/209,491, entitled "METHOD FOR CIRCULAR STAPLERCONTROL ALGORITHM ADJUSTMENT BASED ON SITUATIONAL AWARENESS", now U.S. Patent Application Publication No. 2019/0200998;
·美国专利申请序列号16/562,123,其名称为“METHOD FOR CONSTRUCTING ANDUSING A MODULAR SURGICAL ENERGY SYSTEM WITH MULTIPLE DEVICES”;U.S. Patent Application Serial No. 16/562,123, entitled "METHOD FOR CONSTRUCTING ANDUSING A MODULAR SURGICAL ENERGY SYSTEM WITH MULTIPLE DEVICES";
·美国专利申请序列号16/562,135,其名称为“METHOD FOR CONTROLLING ANENERGY MODULE OUTPUT”;U.S. Patent Application Serial No. 16/562,135, entitled "METHOD FOR CONTROLLING ANENERGY MODULE OUTPUT";
·美国专利申请序列号16/562,144,其名称为“METHOD FOR CONTROLLING AMODULAR ENERGY SYSTEM USER INTERFACE”;以及U.S. Patent Application Serial No. 16/562,144, entitled "METHOD FOR CONTROLLING AMODULAR ENERGY SYSTEM USER INTERFACE"; and
·美国专利申请序列号16/562,125,其名称为“METHOD FOR COMMUNICATINGBETWEEN MODULES AND DEVICES IN A MODULAR SURGICAL SYSTEM”。- US Patent Application Serial No. 16/562,125 entitled "METHOD FOR COMMUNICATING BETWEEN MODULES AND DEVICES IN A MODULAR SURGICAL SYSTEM".
在详细说明电外科系统的各个方面之前,应当指出,例示性示例在应用或使用上不限于附图和说明书中所示出的部件的构造和布置的细节。例示性示例可在其他方面、变型和修改中实现或并入,并且可以各种方式实践或执行。此外,除非另外指明,否则本文所用的术语和表达是为了方便读者而对例示性示例进行描述而所选的,并非为了限制性的目的。而且,应当理解,以下描述的方面、方面的表达和/或示例中的一者或多者可与其他以下描述的方面、方面的表达和/或示例中的任何一者或多者组合。Before describing various aspects of the electrosurgical system in detail, it should be noted that the illustrative examples are not limited in application or use to the details of construction and the arrangement of components shown in the drawings and description. The illustrative examples may be implemented or incorporated in other aspects, variations and modifications, and may be practiced or carried out in various ways. Furthermore, unless otherwise indicated, the terminology and expressions used herein have been chosen for the convenience of the reader to describe illustrative examples and are not for the purpose of limitation. Furthermore, it should be understood that one or more of the aspects, expressions and/or examples of aspects described below may be combined with any one or more of the other aspects, expressions and/or examples of aspects described below.
各个方面涉及电外科系统,这些电外科系统包括由发生器供应功率的电外科器械,以在外科手术期间实现组织解剖、切割和/或凝结。在一个方面,这些电外科器械可以被配置成能够用于开放式外科手术,但还可以应用于其他类型的外科手术,诸如腹腔镜式、内窥镜式和机器人辅助的手术。Various aspects relate to electrosurgical systems including electrosurgical instruments powered by generators to effect tissue dissection, cutting and/or coagulation during surgical procedures. In one aspect, these electrosurgical instruments may be configured for use in open surgery, but may also be applied to other types of surgery, such as laparoscopic, endoscopic, and robotic-assisted surgery.
如下文更详细地描述的,电外科器械通常包括轴,该轴具有远侧安装的端部执行器(例如,一个或多个电极)。该端部执行器可抵靠组织定位,使得电流被引入组织中。电外科器械能够被构造用于双极或单极操作。在双极操作期间,电流分别通过端部执行器的有源电极和返回电极被引入到组织中并从组织返回。在单极操作期间,电流通过端部执行器的有源电极被引入组织中并且通过单独定位在患者身体上的返回电极(例如,接地垫)返回。流过组织的电流所产生的热可在组织内和/或在组织之间形成止血密封,并因此可尤其适用于例如密封血管。As described in more detail below, electrosurgical instruments typically include a shaft with a distally mounted end effector (eg, one or more electrodes). The end effector can be positioned against tissue such that electrical current is introduced into the tissue. Electrosurgical instruments can be configured for bipolar or monopolar operation. During bipolar operation, electrical current is introduced into and returned from the tissue through the active and return electrodes of the end effector, respectively. During monopolar operation, electrical current is introduced into the tissue through the active electrode of the end effector and returned through a return electrode (eg, a ground pad) positioned separately on the patient's body. The heat generated by the electrical current flowing through the tissue can form a hemostatic seal within and/or between the tissue, and thus can be particularly useful for sealing blood vessels, for example.
图1示出了发生器900的示例,该发生器被配置成能够将多种能量模态递送到外科器械。该发生器900提供用于将能量递送到外科器械的RF信号和/或超声信号。该发生器900包括至少一个发生器输出端,该发生器输出端可通过单个端口递送多种能量模态(例如,超声、双极或单极RF、不可逆和/或可逆电穿孔和/或微波能量等等),并且这些信号可单独或同时被递送到端部执行器以处理组织。发生器900包括耦接到波形发生器904的处理器902。处理器902和波形发生器904被配置成能够基于存储在耦接到处理器902的存储器中的信息来生成多种信号波形,为了本公开清楚起见而未示出该存储器。与波形相关联的数字信息被提供给波形发生器904,该波形发生器包括一个或多个DAC电路以将数字输入转换成模拟输出。模拟输出被馈送到放大器906以用于信号调节和放大。放大器906的经调节和放大的输出耦接到功率变压器908。信号通过功率变压器908耦接到患者隔离侧中的次级侧。第一能量模态的第一信号被提供给在被标记为ENERGY1和RETURN的端子之间的外科器械。第二能量模态的第二信号耦接到电容器910两端并被提供给在被标记为ENERGY2和RETURN的端子之间的外科器械。应当理解,可输出超过两种能量模态,并且因此下标“n”可以被用来指定可以提供多至n个ENERGYn端子,其中n是大于1的正整数。还应当理解,在不脱离本公开的范围的情况下,可以提供多至“n”个返回路径RETURNn。FIG. 1 shows an example of a
第一电压感测电路912耦接到被标记为ENERGY1和RETURN路径的端子的两端,以测量这两者之间的输出电压。第二电压感测电路924耦接到被标记为ENERGY2和RETURN路径的端子的两端,以测量这两者之间的输出电压。如图所示,电流感测电路914与功率变压器908的次级侧的RETURN支路串联设置,以测量任一能量模态的输出电流。如果为每种能量模态提供不同的返回路径,则应在每个返回支路中提供单独的电流感测电路。第一电压感测电路912和第二电压感测电路924的输出被提供给相应的隔离变压器928、922,并且电流感测电路914的输出被提供给另一隔离变压器916。功率变压器908(非患者隔离侧)的初级侧上的隔离变压器916、928、922的输出被提供给一个或多个ADC电路926。ADC电路926的数字化输出被提供给处理器902用于进一步处理和计算。可采用输出电压和输出电流反馈信息来调节提供给外科器械的输出电压和电流,并且计算输出阻抗等参数。处理器902和患者隔离电路之间的输入/输出通信通过接口电路920提供。传感器也可通过接口电路920与处理器902电通信。A first
在一个方面,阻抗可由处理器902通过将耦接在被标记为ENERGY1/RETURN的端子两端的第一电压感测电路912或耦接在被标记为ENERGY2/RETURN的端子两端的第二电压感测电路924的输出除以与电力变压器908的次级侧的RETURN支路串联设置的电流感测电路914的输出来确定。第一电压感测电路912和第二电压感测电路924的输出被提供给单独的隔离变压器928、922,并且电流感测电路914的输出被提供给另一隔离变压器916。来自ADC电路926的数字化电压和电流感测测量值被提供给处理器902以用于计算阻抗。例如,第一能量模态ENERGY1可以是RF单极能量,并且第二能量模态ENERGY2可以是RF双极能量。然而,除了双极和单极RF能量模态之外,其他能量模态还包括超声能量、不可逆和/或可逆电穿孔和/或微波能量等等。而且,尽管图1所示的示例示出了可以为两种或更多种能量模态提供单个返回路径RETURN,但在其他方面,可以为每种能量模态ENERGYn提供多个返回路径RETURNn。In one aspect, the impedance can be determined by the
如图1所示,包括至少一个输出端口的发生器900可以包括具有单个输出端和多个分接头的功率变压器908,以根据正在被执行的组织处理类型以一种或多种能量模态(诸如超声、双极或单极RF、不可逆和/或可逆电穿孔和/或微波能量等等)的形式向端部执行器提供功率。例如,发生器900可用更高电压和更低电流递送能量以驱动超声换能器,用更低电压和更高电流递送能量以驱动RF电极以用于密封组织,或者用凝固波形递送能量以用于使用单极或双极RF电外科电极进行点凝固。来自发生器900的输出波形可被操纵、切换或滤波,以向外科器械的端部执行器提供频率。在一个示例中,RF双极电极与发生器900输出端的连接将优选地位于被标记为ENERGY2和RETURN的输出端之间。在单极输出的情况下,优选的连接将是有源电极(例如,光锥(pencil)或其他探头)到ENERGY2输出端的和连接至RETURN输出端的合适的返回垫。As shown in FIG. 1, a
附加细节公开于2017年3月30日公布的标题为“TECHNIQUES FOR OPERATINGGENERATOR FOR DIGITALLY GENERATING ELECTRICAL SIGNAL WAVEFORMS AND SURGICALINSTRUMENTS”的美国专利申请公布2017/0086914中,该专利申请全文以引用方式并入本文。Additional details are disclosed in US Patent Application Publication 2017/0086914, entitled "TECHNIQUES FOR OPERATINGGENERATOR FOR DIGITALLY GENERATING ELECTRICAL SIGNAL WAVEFORMS AND SURGICAL INSTRUMENTS," published March 30, 2017, which is incorporated herein by reference in its entirety.
图2示出了外科系统1000的一种形式,该外科系统包括发生器1100和可以与该发生器一起使用的各种外科器械1104、1106、1108,其中外科器械1104为超声外科器械,外科器械1106为RF电外科器械,并且多功能外科器械1108为组合超声/RF电外科器械。发生器1100可配置用于与多种外科装置一起使用。根据各种形式,发生器1100可为可配置用于与不同类型的不同外科器械一起使用,该外科器械包括例如超声外科器械1104、RF电外科器械1106以及集成了从发生器1100同时递送的RF能量和超声能量的多功能外科器械1108。尽管在图2的形式中,发生器1100被示出为独立于外科器械1104、1106、1108,但在一种形式中,发生器1100可以与外科器械1104、1106、1108中的任一者整体地形成,以形成一体式外科系统。发生器1100包括位于发生器1100控制台的前面板上的输入装置1110。输入装置1110可包括生成适用于对发生器1100的操作进行编程的信号的任何合适的装置。发生器1100可被配置用于有线或无线通信。Figure 2 shows one form of a
发生器1100被配置成能够驱动多个外科器械1104、1106、1108。第一外科器械为超声外科器械1104并且包括手持件1105(HP)、超声换能器1120、轴1126和端部执行器1122。端部执行器1122包括声学地耦接到超声换能器1120的超声刀1128和夹持臂1140。手持件1105包括用于操作夹持臂1140的触发器1143和用于为超声刀1128或其他功能供能和驱动该超声刀或其他功能的切换按钮1137、1134b、1134c的组合。切换按钮1137、1134b、1134c可以被配置成能够利用发生器1100为超声换能器1120供能。The
发生器1100还被配置成能够驱动第二外科器械1106。第二外科器械1106为RF电外科器械,并且包括手持件1107(HP)、轴1127和端部执行器1124。端部执行器1124包括夹持臂1145、1142b中的电极并穿过轴1127的电导体部分返回。这些电极耦接到发生器1100内的双极能量源并由其供能。手持件1107包括用于操作夹持臂1145、1142b的触发器1145和用于致动能量开关以为端部执行器1124中的电极供能的能量按钮1135。第二外科器械1106还可以与返回垫一起使用以向组织递送单极能量。
发生器1100还被配置成能够驱动多功能外科器械1108。多功能外科器械1108包括手持件1109(HP)、轴1129和端部执行器1125。端部执行器1125包括超声刀1149和夹持臂1146。超声刀1149声学地耦接到超声换能器1120。手持件1109包括用于操作夹持臂1146的触发器1147和用于为超声刀1149或其他功能供能和驱动该超声刀或其他功能的切换按钮11310、1137b、1137c的组合。切换按钮11310、1137b、1137c可以被配置成能够利用发生器1100为超声换能器1120供能,并且利用同样包含在发生器1100内的双极能量源为超声刀1149供能。可以将单极能量与双极能量组合地或单独地递送到组织。
发生器1100可配置用于与多种外科装置一起使用。根据各种形式,发生器1100可为可配置用于与不同类型的不同外科器械一起使用,该外科器械包括例如超声外科器械1104、RF电外科器械1106和集成了从发生器1100同时递送的RF能量和超声能量的多功能外科器械1108。尽管在图2的形式中,发生器1100被示出为独立于外科器械1104、1106、1108,但在另一种形式中,发生器1100可以与外科器械1104、1106、1108中的任一者整体地形成,以形成一体式外科系统。如上文所讨论的,发生器1100包括位于发生器1100控制台的前面板上的输入装置1110。输入装置1110可包括生成适用于对发生器1100的操作进行编程的信号的任何合适的装置。发生器1100还可以包括一个或多个输出装置1112。用于数字生成电信号波形的发生器和外科器械的另外方面描述于美国专利申请公开US-2017-0086914-A1中,该专利申请全文以引用方式并入本文。
图3示出了包括可以被激活以执行各种功能的多个马达组件的外科器械或工具600的示意图。在所示实例中,闭合马达组件610可以操作为使端部执行器在打开构型与闭合构型之间转变,并且关节运动马达组件620可以操作为使端部执行器相对于轴组件进行关节运动。在某些情况下,该多个马达组件可以被单独地激活以引起端部执行器中的击发运动、闭合运动和/或关节运动。击发运动、闭合运动、和/或关节运动可例如通过轴组件被传输到端部执行器。3 shows a schematic diagram of a surgical instrument or
在某些情况下,闭合马达组件610包括闭合马达。闭合马达603可以可操作地耦接到闭合马达驱动组件612,该闭合马达驱动组件可以被配置成能够将由马达生成的闭合运动传输到端部执行器,具体地将闭合构件移位成闭合以将端部执行器转变成闭合构型。这些闭合运动可以使例如端部执行器从打开构型转变成闭合构型以捕获组织。端部执行器可以通过反转马达的方向而转变到打开位置。In some cases, the closure motor assembly 610 includes a closure motor. The closure motor 603 can be operably coupled to a closure motor drive assembly 612, which can be configured to transmit the closure motion generated by the motor to the end effector, in particular to displace the closure member closed to move the closure member closed. The end effector transitions to a closed configuration. These closing motions may, for example, transition the end effector from an open configuration to a closed configuration to capture tissue. The end effector can be transitioned to the open position by reversing the direction of the motor.
在某些情况下,关节运动马达组件620包括关节运动马达,该关节运动马达可操作地耦接到关节运动驱动组件622,该关节运动驱动组件可以被配置成能够将由马达生成的关节运动传输到端部执行器。在某些情况下,关节运动可使端部执行器相对于轴进行关节运动,例如。In some cases,
外科器械600的马达中的一个或多个马达可以包括扭矩传感器以测量马达的轴上的输出扭矩。可以任何常规方式感测端部执行器上的力,诸如通过钳口的外侧上的力传感器或通过用于致动钳口的马达的扭矩传感器来感测端部执行器上的力。One or more of the motors of
在各种情况下,马达组件610、620包括一个或多个马达驱动器,该一个或多个马达驱动器可以包括一个或多个H桥FET。这些马达驱动器可以基于来自例如控制电路601的微控制器640(“控制器”)的输入来调节从功率源630传输到马达的功率。在某些情况下,微控制器640可以用于确定例如马达所消耗的电流。In various cases, the
在某些情况下,微控制器640可以包括微处理器642(“处理器”)和一个或多个非暂态计算机可读介质或存储单元644(“存储器”)。在某些情况下,存储器644可以存储各种程序指令,这些程序指令当被执行时可以使处理器642执行本文所述的多个功能和/或计算。在某些情况下,存储器单元644中的一个或多个存储器单元可以例如耦接到处理器642。在各个方面,微控制器640可通过有线或无线信道或它们的组合进行通信。In some cases,
在某些情况下,功率源630可以例如用于为微控制器640供应功率。在某些情况下,功率源630可以包括例如电池(或者“电池组”或“功率组”),诸如锂离子电池。在某些情况下,电池组可被配置成能够可释放地安装到柄部以用于给外科器械600供应功率。串联连接的多个电池单元可以用作功率源630。在某些情况下,功率源630可以是例如可替换的和/或可再充电的。In some cases,
在各种情况下,处理器642可以控制马达驱动器来控制组件610、620的马达的位置、旋转方向和/或速度。在某些情况下,处理器642可以发信号通知马达驱动器停止和/或停用马达。应当理解,如本文所用的术语“处理器”包括任何合适的微处理器、微控制器、或将计算机的中央处理单元(CPU)的功能结合在一个集成电路或至多几个集成电路上的其他基础计算装置。处理器642是多用途的可编程装置,该装置接收数字数据作为输入,根据其存储器中存储的指令来处理该输入,然后提供结果作为输出。因为处理器具有内部存储器,所以是时序数字逻辑的示例。处理器的操作对象是以二进制数字系统表示的数字和符号。In various cases, the processor 642 may control the motor drives to control the position, direction of rotation and/or speed of the motors of the
在一种情况下,处理器642可以是任何单核或多核处理器,诸如由德克萨斯器械公司(Texas Instruments)生产的商品名为ARM Cortex的那些单核或多核处理器。在某些情况下,微控制器620可为例如可从德州器械公司(Texas Instruments)购得的LM4F230H5QR。在至少一个示例中,Texas Instruments LM4F230H5QR为ARM Cortex-M4F处理器芯,其包括:256KB的单循环闪存或其他非易失性存储器(高达40MHz)的片上存储器、用于改善高于40MHz的性能的预取缓冲器、32KB的单循环SRAM、装载有
在某些情况下,存储器644可以包括用于控制外科器械600的马达中的每个马达的程序指令。例如,存储器644可以包括用于控制闭合马达和关节运动马达的程序指令。此类程序指令可以使处理器642根据来自外科器械600的算法或控制程序的输入来控制闭合和关节运动功能。In some cases,
在某些情况下,一个或多个机构和/或传感器诸如例如传感器645可以用于警示处理器642应当在特定设置中使用的程序指令。例如,传感器645可警示处理器642使用与使端部执行器闭合和使端部执行器进行关节运动相关联的程序指令。在某些情况下,传感器645可以包括例如可以用于感测闭合致动器的位置的位置传感器。因此,如果处理器642从传感器630接收到指示闭合致动器的致动的信号,则处理器642可以使用与使端部执行器闭合相关联的程序指令来激活闭合驱动组件620的马达。In some cases, one or more mechanisms and/or sensors such as, for example, sensor 645 may be used to alert processor 642 of program instructions that should be used in a particular setting. For example, sensor 645 may alert processor 642 to use program instructions associated with closing and articulating the end effector. In some cases, sensor 645 may include, for example, a position sensor that may be used to sense the position of the closure actuator. Thus, if processor 642 receives a signal from
在一些示例中,这些马达可以是无刷DC电动马达,并且相应的马达驱动信号可以包括提供给这些马达的一个或多个定子绕组的PWM信号。而且,在一些示例中,可以省略这些马达驱动器,并且控制电路601可以直接生成马达驱动信号。In some examples, the motors may be brushless DC electric motors, and the corresponding motor drive signals may include PWM signals provided to one or more stator windings of the motors. Also, in some examples, these motor drivers may be omitted, and the
在各种腹腔镜式外科手术期间,常见的做法是,通过已经安装在患者的腹壁中的套管针插入外科器械的外科端部执行器部分以触及位于患者腹部内部的外科手术部位。在其最简单的形式中,套管针是在一个端部具有尖锐三角形点的笔状器械,该笔状器械通常在称为插管或套筒的中空管内使用以形成通往身体内的开口,外科端部执行器可以通过该开口引入。这种布置形成通往体腔内的入口,外科端部执行器可以通过该入口插入。套管针的插管内径必然限制了可以通过该套管针插入的外科器械的端部执行器和驱动支撑轴的尺寸。During various laparoscopic surgical procedures, it is common practice to insert the surgical end effector portion of a surgical instrument through a trocar already installed in the patient's abdominal wall to access a surgical site located inside the patient's abdomen. In its simplest form, a trocar is a pen-like instrument with a sharp, triangular point at one end that is typically used within a hollow tube called a cannula or sleeve to form an opening into the body , a surgical end effector can be introduced through this opening. This arrangement forms an access port into the body cavity through which the surgical end effector can be inserted. The inner diameter of the cannula of the trocar necessarily limits the size of the end effector and drive support shaft of a surgical instrument that can be inserted through the trocar.
无论正在被执行的外科手术的特定类型是什么,一旦外科端部执行器已经通过套管针插管插入患者体内,那么就通常必须使外科端部执行器相对于位于套管针插管内的轴组件运动,以便相对于待治疗的组织或器官正确地定位外科端部执行器。外科端部执行器相对于轴的保留在套管针插管内的部分的这种运动或定位通常被称为外科端部执行器的“关节运动”。已经开发了各种关节运动接头来将外科端部执行器附接到相关联的轴,以便有利于外科端部执行器进行这种关节运动。正如所预料的,在许多外科手术中,希望采用具有尽可能大的关节运动范围的外科端部执行器。Regardless of the particular type of surgical procedure being performed, once the surgical end effector has been inserted into the patient through the trocar cannula, it is often necessary to position the surgical end effector relative to the The shaft assembly moves to properly position the surgical end effector relative to the tissue or organ to be treated. This movement or positioning of the surgical end effector relative to the portion of the shaft that remains within the trocar cannula is commonly referred to as "articulation" of the surgical end effector. Various articulation joints have been developed to attach surgical end effectors to associated shafts in order to facilitate such articulation of the surgical end effector. As expected, in many surgical procedures it is desirable to employ a surgical end effector with the greatest possible range of articulation.
由于套管针插管的尺寸所施加的尺寸约束,关节运动接头部件的尺寸必须被设定成能够通过套管针插管自由插入。这些尺寸约束还限制了各种驱动构件和部件的尺寸和组分,这些驱动构件和部件与支撑在外壳中的马达和/或其他控制系统可操作地接合,该外壳可以是手持式的或包括较大自动化系统的一部分。在许多情况下,这些驱动构件必须可操作地穿过关节运动接头,以可操作地耦接到外科端部执行器或与外科端部执行器可操作地接合。例如,一个这种驱动构件常常用于将关节运动控制动作施加到外科端部执行器。在使用过程中,可以不致动关节运动驱动构件以将外科端部执行器定位在非关节运动位置,以有利于外科端部执行器通过套管针插入,并且随后致动关节运动驱动构件,以一旦外科端部执行器已经进入患者体内,就使外科端部执行器关节运动到期望的位置。Due to the dimensional constraints imposed by the size of the trocar cannula, the articulation joint components must be sized for free insertion through the trocar cannula. These dimensional constraints also limit the size and composition of the various drive members and components that operably engage with motors and/or other control systems supported in a housing, which may be hand-held or include part of a larger automated system. In many cases, these drive members must be operatively passed through the articulation joint to be operatively coupled to or operatively engaged with the surgical end effector. For example, one such drive member is often used to apply articulation control action to a surgical end effector. During use, the articulation drive member may be deactivated to position the surgical end effector in a non-articulating position to facilitate insertion of the surgical end effector through the trocar, and then the articulation drive member may be actuated to Once the surgical end effector has entered the patient, the surgical end effector is articulated to the desired position.
因此,前述尺寸限制对开发可以实现期望的关节运动范围的关节运动系统造成了许多挑战,但仍然容纳操作外科端部执行器的各种特征部所必需的各种不同的驱动系统。此外,一旦外科端部执行器已经位于期望的关节运动位置,关节运动系统和关节运动接头就必须能够在端部执行器的致动和外科手术的完成期间将外科端部执行器保持在该位置。此类关节运动接头布置还必须能够承受在使用期间端部执行器所经受的外部力。Accordingly, the aforementioned size constraints pose many challenges to developing an articulation system that can achieve the desired range of articulation, while still accommodating the various drive systems necessary to operate the various features of the surgical end effector. Furthermore, once the surgical end effector has been in the desired articulation position, the articulation system and articulation joint must be able to hold the surgical end effector in that position during actuation of the end effector and completion of the surgical procedure . Such articulation joint arrangements must also be able to withstand the external forces experienced by the end effector during use.
在特定外科手术的整个过程中,通常使用一个或多个外科装置的各种模式。例如,在外科装置与集中式外科集线器之间延伸的通信路径可以提高外科手术的效率和成功率。在各种情况下,外科系统内的每个外科装置包括显示器,其中该显示器传送外科系统内其他外科装置的存在和/或操作状态。外科集线器可以使用通过通信路径接收的信息来评估与彼此一起使用的外科装置的兼容性,评估在特定外科手术期间使用的外科装置的兼容性并且/或者优化外科装置的操作参数。如本文更详细地描述的,可以基于例如患者人口统计数据、特定外科手术和/或检测到的环境条件诸如组织厚度来优化该一个或多个外科装置的操作参数。Various modalities of one or more surgical devices are typically used throughout a particular surgical procedure. For example, a communication path extending between a surgical device and a centralized surgical hub can improve the efficiency and success of surgical procedures. In various cases, each surgical device within the surgical system includes a display, wherein the display communicates the presence and/or operational status of other surgical devices within the surgical system. Surgical hubs can use the information received over the communication paths to evaluate compatibility of surgical devices used with each other, evaluate compatibility of surgical devices used during a particular surgical procedure, and/or optimize operating parameters of surgical devices. As described in greater detail herein, the operating parameters of the one or more surgical devices may be optimized based on, for example, patient demographics, specific surgical procedures, and/or detected environmental conditions such as tissue thickness.
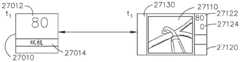
图4至图9示出了分区的显示系统。分区的显示在手持式外科器械27000的显示器27010与主监视器显示器27100之间传送各种发生器和/或外科装置参数。图4描绘了手持式外科器械27000的显示器27010的示例。在各种情况下,显示器27010包括能够接收用户输入的触敏图形用户界面。显示器27010包括允许用户自定义在任何给定时间在显示器27010上示出的信息和/或图像的各种设置和/或模式。4 to 9 illustrate a partitioned display system. The display of the zones communicates various generator and/or surgical device parameters between the
外科器械27000与主显示监视器27100通信。主显示监视器27100包括比外科器械27000的显示器27010更大的屏幕。在各种情况下,主显示监视器27100显示与外科器械27000的显示器27010相同的信息和/或图像。在其他情况下,主显示监视器27100显示与外科器械27000的显示器27010不同的信息和/或图像。在各种情况下,主显示监视器27100包括能够接收用户输入的触敏图形用户界面。类似于外科器械27000的显示器27010,主显示监视器27100包括允许用户自定义在任何给定时间在主显示监视器27100上示出的信息和/或图像的各种设置和/或模式。如本文更详细地描述的,主显示监视器27100上的选定模式可以改变外科器械27000上的显示器27010的模式,反之亦然。换句话说,主显示监视器27100和外科器械显示器27010一起合作,以最有效地向用户传送选定的操作参数。
所描绘的手持式外科器械27000包括组合电外科功能,其中外科器械27000包括端部执行器,该端部执行器包括第一钳口和第二钳口。第一钳口和第二钳口包括设置在其上的电极。电外科器械27000包括一个或多个功率发生器,该功率发生器被配置成能够向电极供应功率以为这些电极供能。更具体地,通过为被配置成能够在单极模式、双极模式和/或组合模式下递送能量的电极供能来实现向支撑在第一钳口与第二钳口之间的患者组织的能量递送。组合模式被配置成能够递送交替或混合的双极和单极能量。在至少一个实施方案中,该至少一个功率发生器包括电池、可充电电池、一次性电池和/或它们的组合。关于第一发生器和第二发生器的操作的各种细节更详细地描述于以下专利申请中:2019年9月5日提交的名称为“METHOD FOR CONSTRUCTING AND USING A MODULAR SURGICAL ENERGYSYSTEM WITH MULTIPLE DEVICES”的美国专利申请序列号16/562,123,该申请据此全文以引用方式并入。The depicted hand-held
外科器械27000的显示器27010和主显示监视器27100包括分区的显示以向用户传送许多操作参数。分区的显示被配置成能够被选择性地分割。换句话说,用户能够选择要显示的操作参数和/或选定的操作参数的显示位置。这种自定义通过消除不需要的和/或不必要的信息,同时允许用户高效地观察控制外科器械27000和/或执行外科手术所需要和/或所期望的信息来使分心最小化。外科器械27000的显示器27010包括第一部分27012,其中显示特定模式的功率水平。外科器械27000的显示器27010还包括第二部分27014,其中外科器械27000所处的模式和/或外科器械27000正在递送的能量的类型被识别或被以其他方式传送。The
类似地,主显示监视器27100包括分割的显示;然而,在各种情况下,显示监视器27100上显示的图像可以彼此覆盖。主显示监视器27100的中心部分27110将外科手术部位的实时馈送和/或静态图像流式传输到手术室。外科手术部位的实时馈送和/或图像是通过适当地定位的相机诸如内窥镜捕获的。主显示监视器27100的菜单选择部分27130提示和/或以其他方式允许用户选择主显示监视器27100所处的模式和/或用户希望在主显示监视器27100上看到的信息。主显示监视器27100的装置状态部分27120传送类似于外科器械显示器27010的第一部分27012的信息。在各种情况下,装置状态部分27120被进一步划分成多个区段。例如,第一部分27122被配置成能够传送反映双极模式的操作参数。这种操作参数可以是特定的和/或一般的。特定操作参数可以例如反映双极模式的功率水平。一般操作参数可以例如指示双极模式是激活的还是未激活的。第二部分27124被配置成能够传送反映单极模式的操作参数。这种操作参数可以是特定的和/或一般的。特定操作参数可以例如反映单极模式的功率水平。一般操作参数可以例如指示单极模式是激活的还是未激活的。第三部分27126被配置成能够传送反映排烟系统的操作参数。这种操作参数可以是特定的和/或一般的。特定操作参数可以例如反映排烟系统的功率水平。一般操作参数可以例如指示排烟系统是激活的还是未激活的。Similarly, the
现在参见图5至图9,外科器械27000的显示器27010被示出为在主显示监视器27100上的对应显示旁边。如本文更详细地描述的,当用户改变手持式外科器械27000上的功率水平时,这种功率水平变化会反映在主显示监视器27100上。例如,如图5所示,运行双极模式的发生器当前正在80瓦特的功率水平下进行操作,如在主显示监视器27100的装置状态部分27120和外科器械显示器27010的第一部分27012和第二部分27014中所指示的。更具体地,外科器械显示器27010的第一部分27012表示发生器的输出,而外科器械显示器27010的第二部分27014表示能量的模式和/或类型。类似地,主显示监视器27100的装置状态部分27120指示发生器正在80瓦特的功率水平下运行双极能量模式并且发生器正在零瓦特的功率水平下运行单极能量模式。在接收到将运行双极模式的发生器的功率输出增加到100瓦特的命令时,外科器械显示器27010和主显示监视器27100如图6所示相应地改变。更具体地,外科器械显示器27010的第一部分27012现在表示100瓦特的功率水平,并且主显示监视器27100的装置状态部分27120现在指示发生器正在100瓦特的功率水平下运行双极模式。主显示监视器27100继续指示单极能量模式正在零瓦特的功率水平下运行;然而,主显示监视器27100还指示:由于在外科手术部位内检测到烟雾和/或外科器械的功率水平增加,烟雾检测系统已经被激活至20%27126。Referring now to FIGS. 5-9 , the
图7至图9描绘了当双极能量和单极能量两者的组合被递送到患者组织时外科器械27000的显示器27010和对应的主显示监视器27100。图7示出了处于总功率模式的外科器械显示器27010的第一部分27012'。如在主显示监视器27100上所示,双极能量模式27122正在60瓦特的功率水平下运行,并且单极能量模式27124正在60瓦特的功率水平下运行。然而,在外科器械显示器27010的第一部分27012'上表示120瓦特的组合和/或总功率水平。主显示监视器27100还指示:由于在外科手术部位内检测到烟雾和/或外科器械的功率水平增加,烟雾检测系统已经被激活至50%27126。如图8所示,用户可能希望在外科器械显示器27010的第一部分27012”上看到双极模式和单极模式的单独功率水平,并且在主显示监视器27100的装置状态部分27122'上看到总功率水平。换句话说,图8中的显示器上示出的信息与图7所示的显示器是反转的。主显示监视器27100还指示:由于在外科手术部位内检测到烟雾和/或双极和/或单极模式的功率水平的变化,烟雾检测系统已经被激活至73%27126。图9所示的一对显示器在许多方面类似于图8所示的一对显示器;然而,用户已经选择从主显示监视器27100移除对烟雾检测系统的操作水平的指示。7-9 depict the
如本文更详细地讨论的,外科器械显示器27010和/或主显示监视器27100可以包括触敏图形用户界面。在各种情况下,外科器械显示器27010用于控制在外科器械显示器27010上显示的内容,而不是在主显示监视器27100上显示的内容。在其他情况下,主显示监视器27100用于控制在外科器械显示器27010上显示的内容,而不是在主显示监视器27100上显示的内容。在各种情况下,每个显示器被配置成能够控制在其自身的显示器上显示的内容。在各种情况下,外科系统内的每个显示器被配置成能够协作地控制外科系统内的其他显示器上显示的内容。As discussed in greater detail herein,
在各种情况下,外科系统包括电外科装置和排烟系统。如本文更详细地讨论的,电外科装置被配置成能够通过为电极供能来向支撑在端部执行器的钳口之间的患者组织递送能量。这些电极被配置成能够在单极模式、双极模式和/或具有交替或混合的双极和单极能量的组合模式下递送能量。在各种情况下,第一发生器被配置成能够控制双极能量模态,并且第二发生器被配置成能够控制单极能量模态。第三发生器被配置成能够控制排烟系统。关于第一发生器和第二发生器的操作的各种细节更详细地描述于以下专利申请中:2019年9月5日提交的名称为“METHOD FOR CONSTRUCTING AND USING A MODULAR SURGICALENERGY SYSTEM WITH MULTIPLE DEVICES”的美国专利申请序列号16/562,123,该申请据此全文以引用方式并入。In various cases, the surgical system includes an electrosurgical device and a fume extraction system. As discussed in greater detail herein, the electrosurgical device is configured to deliver energy to patient tissue supported between the jaws of the end effector by energizing the electrodes. The electrodes are configured to deliver energy in a monopolar mode, a bipolar mode, and/or a combined mode with alternating or mixed bipolar and monopolar energies. In each case, the first generator is configured to control the bipolar energy modality and the second generator is configured to control the monopolar energy modality. The third generator is configured to control the fume extraction system. Various details regarding the operation of the first and second generators are described in more detail in the following patent application: "METHOD FOR CONSTRUCTING AND USING A MODULAR SURGICALENERGY SYSTEM WITH MULTIPLE DEVICES", filed September 5, 2019 US Patent Application Serial No. 16/562,123, which is hereby incorporated by reference in its entirety.
图10是描绘排烟系统的占空比与递送到患者组织的总有效能量之间的比例关系的图形表示27200。时间27210沿着x轴来表示,而功率(W)27220a和排烟系统的占空比(%)27220b沿着y轴来表示。在以下三个方面表示总有效能量:(1)双极疗法27230;(2)单极疗法27240;和(3)组合能量27250。在以下两方面表示排烟器占空比的百分比:(1)响应于组合能量27260;和(2)仅响应于双极疗法27270。例如,在时间t0,不向患者组织递送功率并且排烟系统是未激活的。在时间t1,在第一功率水平P1下递送双极疗法27230。在时间t1,双极疗法27230是向患者组织递送的唯一能量。随着功率在时间段t0至t1期间增加到P1,排烟系统被激活。在时间t1,利用排烟占空比的第一百分比S1。10 is a
在时间t2,双极疗法27230的功率水平增加,并且单极疗法27240已经开始被递送。在时间t3,双极疗法27230降低,而单极疗法27240增加。总体而言,组合能量27250从t2至t3基本上保持相同。在时间t3,组合能量27250在第三功率水平P3下递送,该第三功率水平高于在时间t1递送的第一功率水平P1。由于功率在时间段t1至t3期间增加到P3,因此排烟系统占空比的百分比也增加。在时间t3,利用排烟占空比的第三百分比S3。第三百分比S3大于第一百分比S1。在时间t4,双极疗法27230的递送已经停止,并且向患者组织递送的唯一能量是通过单极疗法27240获得的。值得注意的是,在时间t4,单极疗法27240在整个外科手术期间递送的单极疗法的最高水平P4下向患者组织递送能量。因此,由于在时间t4的递送能量P4大于在时间t3的递送能量P3,因此排烟占空比的百分比也增加。在时间t4,利用排烟占空比的第四百分比S4。第四百分比S4大于第三百分比S3和第一百分比S1。At time t2 , the power level of
图10的图形表示示出了在外科手术的所有不同时间点在不同水平下递送的双极能量27230。此类时间点可以对应于组织密封周期,在该组织密封周期中,外科集线器响应于当前双极功率水平而命令排烟系统增加或降低其操作水平。在组织密封周期完成后,可以在限定的时间段内施加单极能量以切割患者组织。当切割患者组织时,外科集线器可以例如基于被施加以切割组织的能量的增加而命令排烟系统增加其操作水平,因为所施加的能量的这种增加通常对应于灼烧组织而产生的烟雾的增加。在特定外科手术期间,外科集线器知道能量递送和功率水平变化的预定义时间点。这些预定义时间点可以例如基于要执行的特定外科手术的类型而变化。这些预定义时间点可以例如基于识别到外科集线器的患者人口统计数据而变化。所施加的能量类型和/或所施加的能量水平的任何检测到的变化都可以触发外科系统的不同部件的响应。The graphical representation of Figure 10 shows the
类似于相对于图10描述的外科系统,图11中描绘的外科系统27700包括与外科集线器通信的电外科器械27710。电外科器械27710被配置成能够通过被配置成能够在单极模式、双极模式和/或组合模式下递送能量的电极来向支撑在端部执行器的钳口之间的患者组织递送能量。电外科器械27710被配置成能够在处于组合模式时向患者组织施加交替或混合的双极和单极能量。外科系统27700还包括被配置成能够控制单极能量模态的第一发生器27720,以及被配置成能够控制双极能量模态的第二发生器27730。显示屏27750位于手术室内在用户的视野内的位置。在各种情况下,电外科器械27710包括位于其上的显示器。当第二发生器27730使双极能量被递送到患者组织时,手术室内的器械显示器和/或显示屏27750指示所施加的功率水平。在各种情况下,排烟系统的排烟水平在显示器上指示,其中排烟水平基于所施加的能量水平和/或能量类型。如本文更详细地讨论的,当第一发生器27720使单极能量被递送到患者组织并且/或者第二发生器27730使减少量的双极能量被递送到患者组织时,显示器被配置成能够更新显示的或以其他方式传送的操作参数。随着功率水平在外科手术期间改变,向外科集线器传送此类变化。作为响应,外科集线器被配置成能够自动或在没有外部提示的情况下更改排烟水平,以补偿施加到患者组织的能量水平和/或能量类型的变化。Similar to the surgical system described with respect to Figure 10, the
器械显示器和显示屏27750中的至少一者包括被配置成能够接收用户输入的触敏图形用户界面。用户能够选择要显示的信息、选定的信息在特定显示器上的显示位置,以及/或者外科系统内显示期望的信息的显示器。在各种情况下,外科系统27700还包括位于手术室内的一个或多个相机。该一个或多个相机被配置成能够监测用户和/或外科系统的装置的运动。该一个或多个相机可以向外科集线器传送任何检测到的运动,其中该外科集线器辨别出检测到的运动对应于预先确定的命令。例如,当用户挥动手臂时,相机可以检测到。外科集线器内的存储器将手臂挥动与用户期望清除所有操作参数的显示相关,使得保留在显示器上的信息只有外科手术部位的实时馈送和/或图像。可以与特定用户和/或器械运动相关联的示例性命令包括:调节显示器的位置、调节显示器的视图、调节显示器上呈现的信息、调节所显示的信息在特定显示器上的位置、调节所显示的信息的尺寸、控制发生器的功率水平以及/或者控制外科系统的各种外科器械的操作参数。At least one of the instrument display and display screen 27750 includes a touch-sensitive graphical user interface configured to receive user input. The user can select the information to be displayed, where the selected information is displayed on a particular display, and/or the display within the surgical system that displays the desired information. In various cases, the
如相对于外科系统27700所讨论的,电外科器械27710包括组合电模态。电外科器械的单极模态由第一发生器27720运行,而双极模态由第二发生器27730运行。向患者组织递送单极能量以制造切口,或者以其他方式切割经处理的组织。在切割患者组织之前,向该组织递送双极能量以便密封和/或烧灼目标组织。图12示出了第一发生器和第二发生器27320a相对于时间(t)27310的功率水平(瓦数)的图形表示27300。在以下两方面表示功率水平:(1)第一发生器27340;和(2)第二发生器27330。图形表示27300还描绘了组织阻抗(Ω)27320b相对于时间(t)27310的关系。在以下两方面表示组织阻抗:(1)响应于递送的单极能量27345;和(2)响应于递送的双极能量27335。As discussed with respect to
由于第二发生器27330的功率水平从零增加,因此双极能量被递送到患者组织。患者组织的阻抗响应于双极能量27335的施加而增加。值得注意的是,即使在第二发生器27330的功率水平开始降低之后,患者组织的阻抗也继续增加一定量的时间。换句话说,在没有递送单极能量来切割患者组织的情况下,在第二发生器27330的功率水平降低后,通过双极能量27335密封的组织的阻抗最终会降低;然而,在此类情况下组织的阻抗不一定立即降低。在时间t1,第一发生器27340的功率水平增加,从而通过向患者组织递送单极能量来切割组织。患者组织的阻抗还响应于单极能量27345的施加而增加。值得注意的是,随着组织被切割并且第一发生器27340的功率水平降低,患者组织的阻抗指数地增长。As the power level of the
图13描绘了用于控制外科系统的各种部件的算法27400。该外科系统包括被配置成能够执行预期外科功能的外科器械。在各种情况下,外科器械是手持式的并且包括柄部。用户被配置成能够通过柄部上的输入元件运行外科器械的各种模式。如本文更详细地描述的,外科器械包括被配置成能够向单极模态供应功率的第一发生器,以及被配置成能够向双极模态供应功率的第二发生器。外科系统还包括排烟系统,该排烟系统被配置成能够从外科手术部位移除烟雾和/或其他不需要的颗粒。外科器械和/或排烟系统与外科集线器信号通信,其中该外科集线器被配置成能够响应于该外科器械、该排烟系统和/或外科系统内的另一部件上的用户输入而协调该外科系统的部件的适合响应。Figure 13 depicts an
如图13所示,控制算法27400在用户改变27410该外科器械的模式时开始。例如,用户可能希望增加第一发生器的功率水平以切割患者组织。又如,用户可能希望该外科器械密封和/或切割患者组织。在任何情况下,该外科器械然后分别向第一发生器和第二发生器传送27412、27414用户输入。外科器械还向外科集线器传送27415用户输入。在外科集线器被告知27420期望的单极能量增加之后,该外科集线器被配置成能够命令27425第二发生器供应和/或施用适合的功率水平。在接收到来自外科器械的通信27412时,第一发生器增加27440波形,以准备切割患者组织。在接收到来自外科器械的通信27414和来自外科集线器的命令27425时,第二发生器增加27450与双极模态相关联的功率水平,以准备在执行切割之后密封患者组织。然后,第二发生器可以向第一发生器传送27455其就绪状态。然后,第一发生器能够开始切割27442患者组织。换句话说,外科集线器防止单极电极被供能,直到双极电极已被供能,以防止切割尚未烧灼和/或密封的组织。外科集线器被进一步配置成能够响应于第一发生器和第二发生器的功率水平的增加而命令27426排烟系统增加马达速率。在排烟系统增加27430其马达速率之后,该排烟系统被配置成能够在外科手术的整个持续时间内保持与外科集线器、外科器械和/或第一发生器和第二发生器的通信线路。例如,该排烟系统被配置成能够向外科集线器连续地传送27435当前马达速率。在此类情况下,排烟系统每分钟或每两分钟向外科集线器传送其当前马达速率;然而,排烟系统能够以任何合适的频率传送其当前马达速率。在外科器械完成期望的组织切割时,用户可以再次在器械柄部上提供输入以降低第一发生器的功率水平并且/或者结束控制算法27400。在各种情况下,控制算法27400被配置成能够在与组织切割的完成对应的预定时间段之后自动降低第一发生器的功率水平。利用控制算法27400,外科集线器能够例如协调外科系统的部件的操作参数,以有利于进行高效和/或有效的外科手术。As shown in Figure 13, the
许多外科装置、工具和/或可替换部件通常在特定外科手术期间使用。本文公开了各种系统,这些系统除了别的以外,还用于简化储存在手术室内在特定手术期间使用的装置和/或部件,使操作员错误最小化,并且/或者在外科手术期间最小化延迟。本文所述的系统除了别的以外还使用在一个或多个外科手术的过程中开发的人工智能和机器学习来增加外科手术的效率。Many surgical devices, tools, and/or replaceable components are commonly used during a particular surgical procedure. Disclosed herein are various systems for, among other things, simplifying storage of devices and/or components in an operating room for use during a particular procedure, minimizing operator error, and/or minimizing during a surgical procedure Delay. The systems described herein use, among other things, artificial intelligence and machine learning developed during one or more surgical procedures to increase the efficiency of surgical procedures.
图14示出了示例性外科系统27500的各种部件。在特定外科手术期间,患者躺在手术台或任何合适的手术表面27510上。在各种情况下,至少部分地使用外科机器人来执行特定手术。外科机器人包括一个或多个机器人臂27520。每个机器人臂27520被配置成能够接收工具部件27590。工具部件27590被配置成能够彼此协作以执行和/或辅助临床医生执行特定外科手术。工具部件可以包括例如外科缝合和/或组织切割工具部件、组织抓取工具部件和/或电外科工具部件。工具部件可以包括其他区分特征,诸如例如尺寸、制造商、制造日期、先前使用的次数和/或到期日期。14 illustrates various components of an exemplary
外科系统27500还包括外科集线器27530。各种外科集线器描述于2018年12月4日提交的名称为“METHOD OF HUB COMMUNICATION”的美国专利申请序列号16/209,395中,该专利申请据此全文以引用方式并入。外科集线器27530包括存储器27535,该存储器存储将在特定手术期间使用的各种合适或以其他方式适合的工具部件27590的组合。换句话说,外科集线器27530的存储器27535包括存储的信息库,该存储的信息库可以用于指示哪些工具部件27590适合在选定手术期间利用。
在执行期望的外科手术之前,临床医生可以向外科集线器27530通知或以其他方式传送与期望的外科手术和/或患者相关的细节。例如,此类细节可以包括例如外科手术的标识、执行外科手术的临床医生的标识和/或患者的生物识别概况。然后,外科集线器27530被配置成能够利用所传送细节中的一个或多个所传送细节来评估和/或确定哪些工具部件27950是执行期望的外科手术所必要的和/或适合用于执行期望的外科手术。在各种情况下,外科集线器27530被配置成能够评估每个工具部件27950的哪些模式适合用于对特定患者执行期望的外科手术。Before performing the desired surgical procedure, the clinician may notify or otherwise communicate details related to the desired surgical procedure and/or the patient to the
如图14所示,四个机器人臂27250围绕或以其他方式附接到手术台27510。三个工具部件27590连接到三个对应的机器人臂27250,使一个机器人臂自由接收另外的工具部件。多个独特的工具部件27560、27570、27580被示出为存储在手术室内的运动支架27550上。如上所述,工具部件27560、27570、27580的类型和/或功能可以是不同的。在此类情况下,外科集线器27530评估可用工具部件27560、27570、27580并且识别用于附接到外科机器人的适合的工具部件。例如,基于一个或多个因素来识别适合的工具部件,该一个或多个因素诸如外科机器人仍然需要哪种工具类型和/或功能以及/或者哪个工具部件完成了例如与期望的外科手术相关联的预先确定的工具部件配对。在各种情况下,例如,外科机器人包括存储器,该存储器存储基于特定外科手术和/或特定患者人口统计数据的预先确定的工具部件配对。在此类情况下,外科机器人能够基于已经附接的工具部件的标识来识别用于附接到外科机器人的适合的工具部件。As shown in FIG. 14, four
在其他情况下,工具部件27560、27570、27580包括相同的类型和/或功能;然而,工具部件27560、27570、27580包括至少一个其他区分特征,诸如例如尺寸、制造商、到期日期和/或先前使用的次数的差异。外科集线器27530评估每个可用工具部件27560、27570、27580的概况,并且基于哪些特征与其他选定和/或附接的工具部件27590的概况兼容来识别适合的工具部件。In other cases,
如图14所示,每个工具部件27560、27570、27580包括位于其上的任何合适位置处的QR码27565、27575、27585,其中每个QR码包含表示QR码所联接到的工具部件的信息概况。用户使用任何适合的扫描工具27540来扫描和/或读取QR码27565、27575、27585。然后,扫描工具27540向外科集线器27530传送QR码和/或包含在QR码内的信息。在QR码本身被扫描工具27540传送给外科集线器27530的情况下,外科集线器27530的处理器被配置成能够解密所接收的QR码所包含的信息概况。虽然所描绘的实施方案包括QR码,但是工具部件可以包括例如任何合适的存储器装置,诸如条形码、RFID标签和/或存储器芯片。As shown in Figure 14, each
外科集线器27530被配置成能够在外科手术期间当工具部件是不可接受的和/或是不期望使用的时向用户发出警示。可通过各种形式的反馈来传送这种提醒,包括例如触觉反馈、声音反馈和/或视觉反馈。在至少一种情况下,该反馈包括音频反馈,并且外科系统27500可以包括当检测到错误时发出声音诸如例如蜂鸣声的扬声器。在某些情况下,该反馈包括视觉反馈,并且工具部件可以包括发光二极管(LED),例如,该LED在检测到错误时闪烁。在某些情况下,可以通过在显示监视器上呈现在临床医生的视野内的警示向用户传送视觉反馈。在各种情况下,该反馈包括触觉反馈,并且外科系统27500的部件可以包括电动马达,该电动马达包括在检测到错误时振动的偏心元件。该提醒可以是特定的或通用的。例如,该警示可以具体指明无法检测到在工具部件上的QR码,或者该警示可以具体指明QR码包括表示不兼容和/或有缺陷的工具部件的信息。
例如,用户尝试将第一工具部件27560附接到外科机器人的可用机器人臂27590。在将第一工具部件27560附接到机器人臂27590之前,扫描工具27540扫描在第一工具部件27560上显示的QR码27565。扫描工具27540向外科集线器27530传送QR码27565和/或包含在QR码27565内的信息。外科集线器27530将包含在QR码27565内的信息和与特定外科手术相关联的可接受工具部件的存储列表和/或与当前附接到外科机器人的工具部件兼容的可接受工具部件的存储列表进行比较。在这种情况下,外科集线器27530无法在其存储器27535内辨别和/或定位第一工具部件27560。因此,不建议第一工具部件27560与外科机器人一起使用并且/或者第一工具部件不适合与外科机器人一起使用。如上文所讨论的,外科集线器27530被配置成能够向临床医生警示第一工具部件27560与外科机器人和/或特定外科手术不相容。在各种情况下,例如,外科系统27500可以防止第一工具部件27560通过机械和/或电锁定件附接到该外科系统。这种附接锁定件防止临床医生错过和/或简单地忽略由外科系统27500发出的警示。换句话说,该附接锁定件要求临床医生采取肯定的步骤来超控由外科系统27500传送的错误。在此类情况下,可以激活超控来允许临床医生超控任何系统锁定件并利用第一工具部件27560的操作功能。在各种情况下,在第一工具部件27560被辨别出与外科机器人不相容而无法与其一起使用时,为了防止临床医生利用第一工具部件27560的功能,超控不可用。For example, a user attempts to attach a
类似地,用户尝试将第二工具部件27570附接到外科机器人的可用机器人臂27590。在将第二工具部件27570附接到机器人臂27590之前,扫描工具27540扫描在第二工具部件27570上显示的QR码27575。扫描工具27540向外科集线器27530传送QR码27575和/或包含在QR码27575内的信息。外科集线器27530将包含在QR码27575内的信息和与特定外科手术相关联的可接受工具部件的存储列表和/或与当前附接到外科机器人的工具部件兼容的可接受工具部件的存储列表进行比较。在这种情况下,外科集线器27530无法在其存储器27535内辨别和/或定位第二工具部件27570。因此,不建议第二工具部件27570与外科机器人一起使用并且/或者第二工具部件不适合与外科机器人一起使用。如上文所讨论的,外科集线器27530被配置成能够向临床医生警示第二工具部件27570与外科机器人和/或特定外科手术不相容。在各种情况下,外科系统27500可以防止第二工具部件27570附接到该外科系统。这种附接锁定件防止临床医生错过和/或简单地忽略由外科系统27500发出的警示。换句话说,该附接锁定件要求临床医生采取肯定的步骤来超控由外科系统27500传送的错误。在此类情况下,可以激活超控来允许临床医生超控任何系统锁定件并利用第二工具部件27570的操作功能。在各种情况下,在第二工具部件27570被辨别出与外科机器人不相容而无法与其一起使用时,为了防止临床医生利用第二工具部件27570的功能,超控不可用。Similarly, the user attempts to attach the
用户尝试将第三工具部件27580附接到外科机器人的可用机器人臂27590。在将第三工具部件27580附接到机器人臂27590之前,扫描工具27540扫描在第三工具部件27580上显示的QR码27585。扫描工具27540向外科集线器27530传送QR码27585和/或包含在QR码27585内的信息。外科集线器27530将包含在QR码27585内的信息和与特定外科手术相关联的可接受工具部件的存储列表和/或与当前附接到外科机器人的工具部件兼容的可接受工具部件的存储列表进行比较。在这种情况下,外科集线器27530在其存储器27535内成功辨别和/或定位第三工具部件27580。然后确定第三工具部件27580适合于在特定外科手术期间与外科机器人一起使用和/或与其他附接的工具部件一起使用。在各种情况下,外科集线器27530被配置成能够向临床医生警示第三工具部件27580与外科机器人兼容。在其他情况下,外科系统27500简单地不防止第三工具部件27580附接到可用机器人臂27590。The user attempts to attach the
在各种情况下,外科集线器27530的存储器27535被配置成能够存储与在特定外科手术期间使用的每个工具部件相关联的QR码。然后,外科集线器27530可以分析收集的信息来形成关于因素诸如例如在外科手术期间特定工具部件和/或多个工具部件的效率和/或有效性的观察结果和/或结论。然后,外科集线器27530可以使用观察结果和/或结论来选择和/或建议在将来的外科手术期间利用哪些工具部件。In various cases, the
图15描绘了包括一个或多个相机的外科系统27600,该一个或多个相机被配置成能够辅助临床医生执行高效和/或成功的外科手术。类似于外科系统27500,外科系统27600包括手术台27610或任何合适的手术表面。外科系统27600还包括外科集线器27650和装置塔27660。各种外科集线器描述于2018年12月4日提交的名称为“METHOD OF HUBCOMMUNICATION”的美国专利申请序列号16/209,395中,该专利申请据此全文以引用方式并入。15 depicts a
外科系统27600还包括相机系统,该相机系统包括位于整个手术室中的各个位置处的一个或多个相机27640。在所描绘的实施方案中,两个相机27640位于手术室的相对拐角中;然而,相机27640可以定位和/或定向在允许相机27640以不受阻碍的方式协作地捕获手术室的任何合适的位置。人工智能协议检测和/或识别手术室内的各种装置、设备和/或人员及其对应的位置和/或定向。The
相机系统的相机27640与外科集线器27650通信。换句话说,可将相机27640的实时馈送传输到外科集线器27650以用于处理和分析。通过对由相机27640收集的素材的分析,外科集线器27650能够维护手术室内的装置、设备和/或人员的实时清单,并且/或者监测和/或控制检测到的装置、设备和/或人员之间的交互。使用由相机系统收集的图像和/或数据,外科集线器27650被配置成能够:被告知检测到的装置的标识,警示临床医生关于检测到的装置的兼容性问题,并且/或者基于检测到的装置的存在和/或操作来控制外科系统27600的各种部件。外科集线器27650被配置成能够:比较任何检测到的装置来确定在特定外科手术期间装置之间的兼容性,有利于趋于一起工作的两个装置的协作,并且/或者有利于基于彼此的感测和/或控制操作的两个装置的协作。The
如图15所示,麻醉推车27670和准备台27620位于手术室内。准备台27620被配置成能够以使得各种外科工具和/或装置在外科手术期间易于触及以便使用的方式支撑这些外科工具和/或装置。例如,此类外科工具和/或装置可以包括不同尺寸的可替换钉仓或轴组件,这些轴组件包括不同尺寸和/或功能的端部执行器。在所描绘的实施方案中,准备台27620支撑第一装置27630a、第二装置27630b和第三装置27630c。As shown in Figure 15, the
相机27640被配置成能够检测关于位于手术室内的装置、设备和/或人员的识别信息。例如,相机27640可以捕获打印在每个装置27630a、27630b、27630c的可见部分上(诸如在装置的包装上)的序列号。在各种情况下,包装包括打印在其上的QR码,该QR码包含关于包含在该包装内的装置的信息。QR码由相机27640捕获并且被传送到外科集线器27650以用于对钉仓进行分析和识别。
这种识别系统可以例如在外科手术期间发挥作用,在该外科手术中,外科缝合器械包括端部执行器,其中60mm的钉仓被配置成能够安置在端部执行器内。例如,手术室内的相机27640被配置成能够以实时视频馈送和/或静态图像形式捕获外科缝合器械的存在。然后,相机27640向外科集线器27650传送所捕获的图像。外科集线器27650被配置成能够基于从相机27640接收的图像来识别外科缝合器械。在外科集线器27650知道要执行的外科手术的情况下,外科集线器27650可以警示临床医生所识别的外科缝合器械是否适合。例如,知道45mm的钉仓与特定外科手术相关联,外科集线器27650可以向临床医生警示检测到的外科缝合器械不适合,因为检测到的外科缝合器械的端部执行器被配置成能够接收60mm的钉仓。Such an identification system may function, for example, during a surgical procedure in which a surgical stapling instrument includes an end effector, wherein a 60 mm staple cartridge is configured to be able to be seated within the end effector. For example, the
外科集线器27650包括在其中存储与各种装置相关联的技术要求和/或规范的存储器27655。例如,外科集线器27650的存储器27655辨别出上述外科缝合器械被配置成能够接收60mm的钉仓。在各种情况下,存储器27655还可以辨别出与外科缝合器械兼容的60mm的钉仓的特定品牌。在各种情况下,例如,相机27640可以实时视频馈送和/或静态图像的形式捕获可替换钉仓的存在。然后,相机27640向外科集线器27650传送所捕获的图像。外科集线器27650被配置成能够基于从相机27640接收的图像来识别可替换钉仓的特征。此类特征包括例如尺寸、品牌和/或制造批次。如本文更详细地讨论的,警示可以是特定的或通用的。在相机27640捕获到包含可替换的45mm钉仓的包装的存在的情况下,外科集线器27650被配置成能够向临床医生警示不兼容的钉仓已经被错误地储存在了房间内。例如,这种警示可以防止外科器械故障、对患者造成伤害和/或在外科手术期间错失宝贵的时间。
如上文所讨论的,相机系统被配置成能够有利于外科集线器27650协调在手术室内检测到的装置。在各种情况下,通过相机系统检测组合能量装置和排烟系统。组合能量装置被配置成能够向患者组织施加双极能量和单极能量。例如,当相机系统和/或外科集线器27650检测到组合能量装置的激活、组合能量装置在患者附近的位置处的存在和/或手术室内烟雾的存在时,外科集线器27650被配置成能够指引发生器来启用排烟系统。As discussed above, the camera system is configured to facilitate the
外科器械可以利用端部执行器的可测量或以其他方式可检测的特征来确认外科手术的特定阶段和/或控制外科器械的各种操作参数。这种特征可以包括例如端部执行器的钳口之间的距离。外科器械和/或外科集线器的存储器包括将特定钳口间隙距离与外科手术的特定阶段相关联的存储信息。例如,当测量到钳口之间的距离在0.030英寸至0.500英寸之间时,外科器械和/或外科集线器确认端部执行器正在向患者组织递送双极能量。在其他情况下,当测量到钳口之间的距离在0.030英寸至0.500英寸之间时,外科器械和/或外科集线器激活发生器,从而发起双极能量向患者组织的递送。换句话说,对外科器械的特征和/或接触的患者组织的检测可以由外科器械和/或外科集线器使用,以便确认和/或调整外科器械的操作。The surgical instrument may utilize measurable or otherwise detectable characteristics of the end effector to identify a particular stage of a surgical procedure and/or to control various operating parameters of the surgical instrument. Such features may include, for example, the distance between the jaws of the end effector. The memory of the surgical instrument and/or the surgical hub includes stored information that associates a particular jaw gap distance with a particular stage of a surgical procedure. For example, the surgical instrument and/or surgical hub confirms that the end effector is delivering bipolar energy to patient tissue when the distance between the jaws is measured to be between 0.030 inches and 0.500 inches. In other cases, when the distance between the jaws is measured to be between 0.030 inches and 0.500 inches, the surgical instrument and/or surgical hub activate the generator, thereby initiating the delivery of bipolar energy to the patient's tissue. In other words, detection of features of the surgical instrument and/or contacted patient tissue may be used by the surgical instrument and/or the surgical hub in order to confirm and/or adjust the operation of the surgical instrument.
图16包括描绘与外科手术的各个阶段对应的外科器械的各种操作参数和/或规格的图表。类似于本文更详细地描述的外科器械,图17至图19中所描绘的外科器械27000包括组合电外科功能,其中该外科器械包括端部执行器,该端部执行器包括第一钳口27810和第二钳口27820。第一钳口27810和第二钳口27820中的至少一者能够相对于彼此运动,并且端部执行器能够在打开构型与闭合构型之间配置。第一钳口27810包括第一组织支撑和/或组织接触表面27815,并且第二钳口27820包括第二组织支撑和/或组织接触表面27825。第一钳口27810和第二钳口27810包括设置在其上的电极。电外科器械27000包括一个或多个功率发生器,该功率发生器被配置成能够向电极供应功率以为这些电极供能。更具体地,通过被配置成能够在单极模式、双极模式和/或组合模式下递送能量的电极来实现向支撑在第一钳口与第二钳口之间的患者组织的能量递送。交替或混合的双极和单极能量被配置成能够在组合模式下递送。在至少一个实施方案中,该至少一个功率发生器包括电池、可充电电池、一次性电池和/或它们的组合。16 includes graphs depicting various operating parameters and/or specifications of the surgical instrument corresponding to various stages of a surgical procedure. Similar to the surgical instrument described in greater detail herein, the
端部执行器27800用于在外科手术期间执行各种端部执行器功能。在最初时间t0,端部执行器27800不与患者组织Tt0接触。因此,端部执行器27800的电极不递送任何能量。在最初时间t0,患者组织Tt0处于松弛、未压缩状态。端部执行器27800被示出为处于打开构型。在打开构型中,第一组织支撑表面27815与第二组织支撑表面27825之间的距离d0跨越从0.500英寸至0.700英寸中的任一距离。换句话说,当端部执行器27800处于打开构型时,组织支撑表面27815、27825彼此分开为0.500英寸至0.700英寸的最大距离d0。The end effector 27800 is used to perform various end effector functions during a surgical procedure. At the initial time t0 , the end effector 27800 is not in contact with the patient tissue Tt0 . Therefore, the electrodes of the end effector 27800 do not deliver any energy. At the initial timet0 , the patient tissueT0 is in a relaxed, uncompressed state. The end effector 27800 is shown in an open configuration. In the open configuration, the distance d0 between the first
在第一时间t1,端部执行器27800的钳口27810、27820开始与患者组织Tt1接触。当端部执行器27800从打开构型朝向闭合构型运动时,患者组织Tt1的至少一部分位于端部执行器27800的钳口27810、27820之间。当钳口27810、27820朝向闭合构型运动时,在这两个钳口之间压缩组织Tt1。在时间t1,端部执行器27800被配置成能够向患者组织Tt1递送双极能量。例如,双极能量的施加允许端部执行器27800羽化穿过实质细胞。在时间T1,端部执行器27800处于部分闭合构型。在时间t1,第一组织支撑表面27815与第二组织支撑表面27825之间的第一距离d1跨越从0.030英寸至0.500英寸之间的任一距离。换句话说,当端部执行器在时间t1向患者组织Tt1递送双极能量时,组织支撑表面27815、27825被分开为0.030英寸至0.500英寸的最大第一距离d1。图17示出了对端部执行器27800的钳口27810、27820在第一时间t1向患者组织Tt1递送双极能量的详细描绘。At a first time t1 , the
在第二时间t2,端部执行器27800的钳口27810、27820保持与患者组织Tt2接触。患者组织Tt2的至少一部分位于端部执行器27800的钳口27810、27820之间。在时间t2,端部执行器27800被配置成能够向患者组织Tt2递送双极能量和单极能量的组合。双极能量和单极能量的施加允许端部执行器27800使患者组织Tt2升温。在时间t2,端部执行器27800处于部分闭合构型;然而,与在时间t1的端部执行器27800相比,在时间t2的远端执行器27800更接近完全闭合构型。更具体地,在时间t2,第一组织支撑表面27815与第二组织支撑表面27825之间的第二距离d2跨越从0.010英寸至0.030英寸之间的任一距离。换句话说,当端部执行器在时间t2向患者组织Tt2递送双极能量和单极能量时,组织支撑表面27815、27825被分开为0.010英寸至0.030英寸的最大第二距离d2。图18示出了对端部执行器27800的钳口27810、27820在第二时间t2向患者组织Tt2递送双极能量和单极能量的详细描绘。At a second timet2 , the
在第三时间t3,端部执行器27800的钳口27810、27820保持与患者组织Tt3接触。患者组织Tt3的至少一部分位于端部执行器27800的钳口27810、27820之间。在时间t3,端部执行器27800被配置成能够继续向患者组织Tt3递送双极能量和单极能量的组合。双极能量和单极能量的继续施加允许端部执行器27800密封患者组织Tt3。在时间t3,端部执行器27800处于部分闭合和/或完全闭合构型。换句话说,与在时间t2的端部执行器27800相比,在时间t3的远端执行器27800处于完全闭合构型并且/或者更接近完全闭合构型。更具体地,在时间t3,第一组织支撑表面27815与第二组织支撑表面27825之间的第三距离d3跨越从0.003英寸至0.010英寸之间的任一距离。换句话说,当端部执行器在时间t3向患者组织Tt3递送双极能量和单极能量时,组织支撑表面27815、27825被分开为0.003英寸至0.100英寸的最大第三距离d3。图18还示出了对端部执行器27800的钳口27810、27820在第三时间t3向患者组织递送双极能量和单极能量的详细描绘。At a third timet3 , the
在第四时间t4,端部执行器27800的钳口27810、27820保持与患者组织Tt4接触。患者组织Tt4的至少一部分位于端部执行器27800的钳口27810、27820之间。在时间t4,端部执行器27800被配置成能够向患者组织Tt4递送单极能量。单极能量的施加允许端部执行器27800切割患者组织Tt4。在时间t4,端部执行器27800处于部分闭合和/或完全闭合构型。换句话说,与在时间t2的端部执行器27800相比,在时间t4的远端执行器27800处于完全闭合构型并且/或者更接近完全闭合构型。更具体地,在时间t4,第一组织支撑表面27815与第二组织支撑表面27825之间的第四距离d4跨越从0.003英寸至0.010英寸之间的任一距离。换句话说,当端部执行器在时间t4向患者组织Tt4递送单极能量时,组织支撑表面27815、27825被分开为0.003英寸至0.010英寸的最大第四距离d4。图19示出了对端部执行器27800的钳口27810、27820在第四时间t4向患者组织Tt4递送单极能量的详细描绘。At afourth time t4, the
图20所示的曲线图27900示出了图16至图19的外科器械的各种操作参数和/或规格与时间之间的关系。外科器械和/或外科集线器可以利用所描绘的关系来确认外科器械在外科手术期间的正确功能并且/或者响应于一个或多个测量的参数而操作和/或调节外科器械的各种功能。该曲线图示出了:(1)发生器控制外科器械的双极模态的功率(W)27920a随时间27910的变化27930;(2)发生器控制外科器械的单极模态的功率(W)27920a随时间27910的变化27935;(3)端部执行器27920b的钳口之间的距离随时间27910的变化27940;(4)钳口马达的力(F)27920c随时间27910的变化27950;以及(5)钳口马达的速度(V)27920d随时间27910的变化27960。The
在时间t0,端部执行器的电极不向患者组织递送能量,并且该端部执行器尚未与患者组织接触。由于端部执行器处于打开构型,因此端部执行器的钳口之间的距离27920b在时间t0最大。夹紧27950钳口的力从时间t0至时间t1最小,因为当端部执行器从打开构型朝向闭合构型运动时,端部执行器几乎没有受到来自患者组织的阻力。端部执行器的钳口从时间t1至时间t2继续接近患者组织周围,在该时间段内,端部执行器开始递送双极能量27930。端部执行器的钳口之间的距离在时间t1比在时间t0更短。从时间t1至时间t2,钳口马达速度27960随着夹紧27950端部执行器的钳口的力开始增加而开始减慢。At time to, the electrodes of the end effector arenot delivering energy to the patient tissue, and the end effector has not been in contact with the patient tissue. Since the end effector is in the open configuration, the
如相对于图16至图29所述,从时间t2至时间t3向患者组织递送单极能量27935和双极能量27930的组合。在该时间段期间,端部执行器的钳口继续接近患者组织周围。端部执行器的钳口之间的距离在时间t2比在时间t1更短。在时间t2端部执行器的钳口之间的特定距离向外科器械和/或外科集线器指示:已经到达外科手术的组织升温阶段,并且应该和/或正在向患者组织递送单极能量和双极能量的组合。从时间t2至时间t3,钳口马达速度继续减小并且小于钳口马达在t1的速度。夹紧钳口所需的力在时间t2至时间t3之间突然增加,从而向外科器械和/或外科集线器确认:正在向患者组织递送单极能量和双极能量的组合。As described with respect to Figures 16-29, a combination of
继续向患者组织递送单极能量和双极能量,并且从时间t3至时间t4密封患者组织。随着端部执行器在时间t3到达其完全闭合构型,夹紧钳口的力也达到最大;然而,夹紧钳口的力在时间t3至时间t4之间保持稳定。发生器递送单极能量的功率水平在时间t3至时间t4之间增加,而发生器递送双极能量的功率水平在时间t3至时间t4之间降低。最后,在时间t4至时间t5之间,单极能量是为了切割患者组织而递送的唯一能量。当切割患者组织时,夹紧端部执行器的钳口的力可以变化。在夹紧钳口的力从其在时间t3至时间t4之间保持的稳态水平降低27952的情况下,由外科器械和/或外科集线器辨别高效和/或有效的组织切割。在夹紧钳口的力从其在时间t3至时间t4之间保持的稳态水平增加27954的情况下,由外科器械和/或外科集线器辨别低效和/或无效的组织切割。在此类情况下,可以向用户传送错误。The delivery of monopolar and bipolar energy to the patient tissue continues, and the patient tissue is sealed from timet3 to time t4. As the end effector reaches its fully closed configuration at timet3 , the force clamping the jaws also reaches a maximum; however, the force clamping the jaws remains stable between timet3 and time t4.The power level at which the generator delivers monopolar energy increases between timet3 and time t4, while the power level at which the generator delivers bipolar energy decreases between timet3 and time t4. Finally, between timet4 and timet5 , the monopolar energy is the only energy delivered to cut the patient tissue. The force with which the jaws of the end effector are gripped can vary as the patient tissue is cut. Efficient and/or effective tissue cutting is identified by the surgical instrument and/or surgical hub where the force clamping the jaws decreases27952 from the steady state level it maintained between timet3 and time t4. Inefficient and/or ineffective tissue cuts are identified by the surgical instrument and/or surgical hub where the force to grip the jaws increases 27954 from the steady state level it maintained between timet3 and time t4. In such cases, errors may be communicated to the user.
在各种情况下,可以基于接触的患者组织的检测到的特征来调节端部执行器的钳口的夹紧操作。在各种情况下,检测到的特征包括组织厚度和/或组织类型。例如,可以基于检测到的患者组织厚度来调节操作,诸如在钳口闭合行程期间钳口之间的间隙距离的范围、负载阈值、钳口闭合的速率、在钳口闭合行程期间施加的电流限制和/或在钳口闭合行程与能量的递送之间的等待时间。在各种情况下,接触的患者组织的检测到的特征可以用于调节组织焊缝参数。更具体地,例如,检测到的特征可以用于调节阻抗感测的多频率扫描、能量模态的平衡和/或序列、能量递送水平、阻抗关闭水平和/或两次能量水平调节之间的等待时间。In various cases, the clamping operation of the jaws of the end effector may be adjusted based on detected characteristics of the contacted patient tissue. In various cases, the detected features include tissue thickness and/or tissue type. For example, operation may be adjusted based on detected patient tissue thickness, such as the range of gap distance between jaws during the jaw closing stroke, load thresholds, rate of jaw closure, current limit applied during the jaw closing stroke and/or the latency between the jaw closing stroke and the delivery of energy. In various cases, the detected characteristics of the contacted patient tissue can be used to adjust tissue weld parameters. More specifically, for example, the detected features can be used to adjust multiple frequency sweeps of impedance sensing, balancing and/or sequencing of energy modalities, energy delivery levels, impedance shut-off levels, and/or the difference between two energy level adjustments. waiting time.
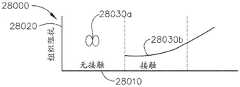
如上文更详细地讨论的,外科器械和/或外科集线器可以利用测量的组织特征来控制和/或调节外科器械的操作参数。例如,当患者组织位于端部执行器的钳口之间时,可以检测组织阻抗。对组织阻抗的检测向外科器械和/或外科集线器警示端部执行器的钳口与患者组织接触和/或在患者组织附近。现在参考图21,曲线图28000示出了随时间28010计算的组织阻抗28020。当端部执行器的钳口不与患者组织接触时,组织阻抗28030a无穷大。当端部执行器的钳口在位于其间的患者组织周围夹紧时,患者组织与两个钳口接触。在此类情况下,组织阻抗28030b是能够测量的。能够测量组织阻抗向外科器械和/或外科集线器指示患者组织被适当地定位在端部执行器的钳口之间。例如,然后,外科器械和/或外科集线器可以发起操作,诸如向患者组织施加双极能量和/或单极能量。As discussed in greater detail above, the surgical instrument and/or surgical hub may utilize the measured tissue characteristics to control and/or adjust operating parameters of the surgical instrument. For example, tissue impedance can be detected when patient tissue is positioned between the jaws of the end effector. Detection of tissue impedance alerts the surgical instrument and/or the surgical hub that the jaws of the end effector are in contact with and/or in the vicinity of patient tissue. Referring now to FIG. 21 ,
在各种情况下,外科器械和/或外科集线器可以利用检测到的组织阻抗的量值来确定外科手术的阶段。例如,如图21所示,在端部执行器的钳口与患者组织之间的初始接触后,组织阻抗28030b被测量到处于第一水平。然后,外科器械可以开始向患者组织递送双极能量。在检测到的组织阻抗28030b增加到第一预先确定的水平和/或高于第一预先确定的水平时,外科器械开始向患者组织递送双极能量和单极能量的组合以使患者组织升温和/或形成密封。随着检测到的组织阻抗28030b继续增加,组织阻抗28030b达到和/或超过第二预先确定的水平,此时外科器械停止双极能量的递送,同时继续递送单极能量以切割患者组织。最后,当在完成切割后患者组织不再位于端部执行器的钳口之间时,组织阻抗达到无穷大的水平。在此类情况下,外科器械和/或外科集线器可以停止单极能量的递送。In various cases, the surgical instrument and/or surgical hub may utilize the magnitude of the detected tissue impedance to determine the stage of the surgical procedure. For example, as shown in Figure 21, following initial contact between the jaws of the end effector and patient tissue, tissue impedance 28030b is measured to be at a first level. The surgical instrument can then begin delivering bipolar energy to the patient's tissue. When the detected tissue impedance 28030b increases to a first predetermined level and/or above the first predetermined level, the surgical instrument begins delivering a combination of bipolar and monopolar energy to the patient tissue to warm the patient tissue and / or form a seal. As the detected tissue impedance 28030b continues to increase, the tissue impedance 28030b reaches and/or exceeds a second predetermined level, at which point the surgical instrument ceases delivery of bipolar energy while continuing to deliver monopolar energy to cut patient tissue. Finally, when the patient tissue is no longer between the jaws of the end effector after the cut is complete, the tissue impedance reaches an infinite level. In such cases, the surgical instrument and/or surgical hub may cease delivery of monopolar energy.
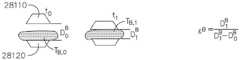
在各种情况下,应变可以是用于调节外科器械诸如夹紧机构的操作参数的度量。然而,对于压缩应变的准确估计,端部执行器的钳口与患者组织之间的接触是期望的。如参考图21更详细地讨论的,外科器械和/或外科集线器可以通过检测到的组织阻抗确定端部执行器的钳口与患者组织之间存在接触。图22示出了包括第一钳口28110和第二钳口28120的端部执行器28100,其中端部执行器处于打开构型。在打开构型中,在第一钳口28110和第二钳口28120之间限定间隙


图23示出了处于打开构型的图22的端部执行器28100。在打开构型中,在第一钳口28110和第二钳口28120之间限定间隙


如上文所述,通过利用当端部执行器处于打开构型时在端部执行器的第一钳口与第二钳口之间限定的间隙来计算压缩应变,仅当在初始时间t0患者组织与端部执行器的两个钳口接触时才产生准确的计算。因此,使用当端部执行器处于打开构型时在端部执行器的第一钳口与第二钳口之间限定的标准间隙是不期望的。相反,当计算压缩应变时,应当使用当患者组织初始接触两个钳口时在端部执行器的第一钳口与第二钳口之间限定的间隙。在图24中端部执行器被示出为处于开放构型28150。值得注意的是,患者组织不与端部执行器钳口28110、28120两者接触。因此,不应当将处于该构型28150的端部执行器的尺寸和/或规格用于计算压缩应变。当第一钳口28110和第二钳口28120中的至少一者继续朝向彼此运动时,在第一钳口28110与第二钳口28120之间限定间隙



组合电外科器械的马达控制程序可以利用检测到的组织稳定性作为输入。外科器械可以检测压缩速率并且/或者可以测量在端部执行器钳口之间压缩的患者组织的蠕变来确定组织稳定性。可以修改控制程序来调节端部执行器功能之间的等待时间,限定何时进行另外的组织稳定性确定,并且/或者基于所确定的组织稳定性来调节钳口夹紧速率。The motor control program of the combined electrosurgical instrument can utilize the detected tissue stability as an input. The surgical instrument can detect the compression rate and/or can measure the creep of the patient tissue compressed between the end effector jaws to determine tissue stability. The control program can be modified to adjust the latency between end effector functions, define when additional tissue stability determinations are made, and/or adjust the jaw clamping rate based on the determined tissue stability.
如图25所示,端部执行器28250包括第一钳口28254和第二钳口28256,其中第一钳口28254和第二钳口28256中的至少一者被配置成能够朝向彼此运动,其中患者组织T被配置成能够位于第一钳口与第二钳口之间。图25提供了在钳口夹紧行程期间第一钳口28254和第二钳口28256相对于患者组织T的各种位置的示意图。在端部执行器的钳口之间限定的间隙28220a和使端部执行器的钳口夹紧所需的马达电流28220b至少部分地由于组织稳定性测量而随时间28210变化。初始斜率S0对应于钳口间隙28230在钳口完全打开的时间至在钳口与患者组织T之间有初始接触的时间点期间的变化。所得马达电流28240在不存在组织接触时保持较低,直到端部执行器钳口接触患者组织T为止。外科系统被配置成能够随时间28210监测电流28220b,以识别电流斜率何时变平,即组织何时稳定。当电流斜率变平时,外科系统被配置成能够获取在端部执行器与组织初始接触的时间和电流变平的时间的峰值电流之间的差值。换句话说,当等待时间到期时,钳口能够继续夹紧位于其间的组织,其中该等待时间通过组织压缩稳定所花费的时间来限定。马达电流的蠕变驱动下一阶段的马达电流和速度,以获得期望的钳口间隙或组织压缩水平。重复蠕变测量以驱动下一阶段的马达电流和速度,直到实现最终钳口间隙或组织压缩水平。As shown in Figure 25, the
除了感测与钳口夹紧行程相关联的参数之外,外科系统还可以监测另外的功能以调节和/或精细化外科器械的操作参数。例如,外科系统可以监测外科器械相对于用户和/或患者的定向、位于端部执行器的钳口之间的组织的阻抗来确定组织位置和/或组织组成、患者的接地水平和/或泄漏电流。可以监测泄漏电流来确定来自其他装置的次级泄漏并且/或者通过电容耦合产生寄生生成的能量输出。In addition to sensing parameters associated with the jaw clamping stroke, the surgical system may monitor additional functions to adjust and/or refine the operating parameters of the surgical instrument. For example, the surgical system may monitor the orientation of the surgical instrument relative to the user and/or the patient, the impedance of tissue between the jaws of the end effector to determine tissue location and/or tissue composition, the patient's grounding level and/or leakage current. Leakage current can be monitored to determine secondary leakage from other devices and/or parasitic generated energy output through capacitive coupling.
在各种情况下,外科器械被配置成能够使用本地无监督机器学习来修改器械和/或发生器设置和/或控制程序。在此类情况下,外科器械可以基于来自利用相同外科器械执行的各种外科手术的数据的汇总和/或集合来更新和/或调节局部功能行为。可以基于先前的用例和/或特定用户和/或医院的偏好来调节此类功能行为。在此类情况下,外科器械的控制程序辨别同一用户并且利用所识别用户的偏好来自动修改默认程序。外科器械能够通过经由与非本地服务器的交互接收对数字启用的控制程序的区域和/或全局更新和/或改进以及/或者所显示的信息来进行更新。In various cases, surgical instruments are configured to be able to use local unsupervised machine learning to modify instrument and/or generator settings and/or control procedures. In such cases, the surgical instrument may update and/or adjust local functional behavior based on the aggregation and/or aggregation of data from various surgical procedures performed with the same surgical instrument. Such functional behavior can be adjusted based on previous use cases and/or preferences of a particular user and/or hospital. In such cases, the control program of the surgical instrument identifies the same user and utilizes the identified user's preferences to automatically modify the default program. The surgical instrument can be updated by receiving regional and/or global updates and/or improvements to the digitally enabled control program and/or displayed information via interaction with a non-local server.
在各种情况下,外科器械被配置成能够使用器械操作参数和/或外科手术结果的全局集合来修改器械和/或发生器设置和/或控制程序。全局外科系统被配置成能够收集关于相关和/或有影响的器械参数的数据,诸如例如结果、并发症、并存病、外科器械成本、器械利用率、手术持续时间、手术数据和/或患者数据。全局外科系统被进一步配置成能够收集关于发生器操作数据的数据,诸如例如阻抗曲线、功率水平、能量模态、事件标注和/或不良事件。全局外科系统被进一步配置成能够收集关于智能装置操作参数的数据,诸如例如夹紧时间、组织压力、等待时间、使用次数、患者在手术台上的时间、电池水平、马达电流和/或致动行程。全局外科系统被配置成能够基于检测到的操作参数来调整默认控制程序并且/或者更新现有控制程序。以此方式,全局外科系统内的每个外科器械能够尽可能地执行最有效和/或高效的外科手术。In various cases, surgical instruments are configured to be able to modify instrument and/or generator settings and/or control procedures using a global set of instrument operating parameters and/or surgical outcomes. The global surgical system is configured to be able to collect data on relevant and/or influential instrument parameters, such as, for example, outcomes, complications, comorbidities, surgical instrument costs, instrument utilization, procedure duration, procedure data, and/or patient data . The global surgical system is further configured to be capable of collecting data regarding generator operational data, such as, for example, impedance curves, power levels, energy modalities, event annotations, and/or adverse events. The global surgical system is further configured to be able to collect data on smart device operating parameters such as, for example, clamping time, tissue pressure, wait time, number of uses, time the patient is on the operating table, battery levels, motor current and/or actuation journey. The global surgical system is configured to be able to adjust default control programs and/or update existing control programs based on detected operating parameters. In this manner, each surgical instrument within the global surgical system is able to perform the most effective and/or efficient surgical procedure possible.
图26示出了与基于云的存储介质28320通信的外科器械28310的网络28300。基于云的存储介质28320被配置成能够接收与来自外科器械28310的操作参数相关的数据,这些操作参数是在许多外科手术中收集的。该数据由基于云的存储介质28320用于优化控制程序以实现高效和/或期望的结果。基于云的存储介质28320被进一步配置成能够分析随机批次28340中的所有收集的数据。来自随机批次28340的分析结果可以进一步用于重新限定控制程序。例如,收集在批次A内的数据可能表示显著不同的磨损曲线。然后可能能够根据该数据得出结论,该结论表明例如调节功率而不是夹紧电流的器械损耗得更快。基于云的存储介质28320被配置成能够就该发现和/或结论与外科器械通信。然后,外科器械可以通过调节夹紧电流而不是功率来最大化器械的使用寿命,并且/或者外科系统可以向临床医生警示该发现。26 shows a
图26示出了与基于云的存储介质28320通信的外科器械28310的网络28300。基于云的存储介质28320被配置成能够接收与来自外科器械28310的操作参数相关的数据,这些操作参数是在许多外科手术中收集的。该数据由基于云的存储介质28320用于优化控制程序以实现高效和/或期望的结果。基于云的存储介质28320被进一步配置成能够分析随机批次28340中的所有收集的数据。来自随机批次28340的分析结果可以进一步用于重新限定控制程序。例如,收集在批次A内的数据可能表示显著不同的磨损曲线。然后可能能够根据该数据得出结论,该结论表明例如调节功率而不是夹紧电流的器械损耗得更快。基于云的存储介质28320被配置成能够就该发现和/或结论与外科器械通信。然后,外科器械可以通过调节夹紧电流而不是功率来最大化器械的使用寿命,并且/或者外科系统可以向临床医生警示该发现。26 shows a
由基于云的存储介质28320从外科器械28310的网络28300收集的信息在图27和28中以图形形式呈现。更具体地,图27示出了在端部执行器的钳口之间限定的间隙28430(其在外科手术期间从初始组织接触的时间点起随时间而变化)与钳口马达夹紧电流28440之间的关系。特定端部执行器在钳口夹紧行程期间已经到达完全夹紧状态的次数会影响夹紧相同厚度的组织所需的力的量。例如,与器械完全夹紧10至15次28430b相比,对于器械完全夹紧1至10次28430a而言,端部执行器的钳口能够利用更少电流夹紧到更大程度。此外,与器械完全夹紧16至20次28430c相比,对于器械完全夹紧10至15次28430b而言,端部执行器的钳口能够利用更少电流夹紧到更大程度。最后,随着外科器械的继续使用,将相同厚度的组织夹紧到相同的完全夹紧间隙需要更多力并且因此更多电流。可以使用来自外科器械28310和基于云的存储介质28320的收集的信息来修改控制程序,以执行更高效和/或有时效性的钳口夹紧行程。The information collected by the cloud-based
通过在端部执行器的钳口之间实现相同的完全夹紧间隙来夹紧相同厚度的组织所需的电流用于设置用于发生器的马达电流阈值。如图28所示,对于已达到完全夹紧状态少于10次的端部执行器而言,马达电流阈值更低,因为实现完全夹紧状态需要更少电流。因此,与更旧的端部执行器的阈值发生器功率相比,控制程序将更新的端部执行器的阈值发生器功率设置得更低。如果在更旧的端部执行器中使用了与在更新的端部执行器中使用的发生器功率相同的发生器功率,则组织可能不会在端部执行器的钳口之间被充分夹紧和/或压缩。如果在更新的端部执行器中使用了与在更旧的端部执行器中使用的发生器功率相同的发生器功率,则组织和/或器械可能会损伤,因为该组织可能被端部执行器的钳口过度压缩。The current required to clamp tissue of the same thickness by achieving the same full clamping gap between the jaws of the end effector is used to set the motor current threshold for the generator. As shown in Figure 28, for end effectors that have reached the fully clamped state less than 10 times, the motor current threshold is lower because less current is required to achieve the fully clamped state. Therefore, the control program sets the threshold generator power of the newer end effector lower than the threshold generator power of the older end effector. If the same generator power is used in an older end effector as is used in a newer end effector, tissue may not be adequately clamped between the jaws of the end effector tight and/or compressed. If the same generator power is used in a newer end effector as was used in an older end effector, tissue and/or instrumentation may be damaged as the tissue may be damaged by the end effector The jaws of the device are over-compressed.
在各种情况下,外科系统包括模块化部件。例如,外科系统包括外科机器人,该外科机器人包括机器人臂,其中这些机器人臂被配置成能够在其上接收具有不同能力的工具。例如,基于模块化附件诸如连接到外科机器人臂的工具的类型来修改外科系统的控制程序。在其他情况下,外科系统包括手持式外科器械,该手持式外科器械被配置成能够在其上接收不同和/或可替换的端部执行器。在执行预期的外科功能之前,手持式外科器械被配置成能够识别附接的端部执行器以及基于端部执行器的所确定的标识来修改控制程序。In various cases, the surgical system includes modular components. For example, a surgical system includes a surgical robot that includes robotic arms, wherein the robotic arms are configured to receive tools having different capabilities thereon. For example, the control program of the surgical system is modified based on the type of modular accessories such as tools attached to the surgical robotic arm. In other cases, the surgical system includes a hand-held surgical instrument configured to receive a different and/or replaceable end effector thereon. Before performing the intended surgical function, the hand-held surgical instrument is configured to be able to identify the attached end effector and to modify the control program based on the determined identification of the end effector.
外科系统被配置成能够使用自适应和/或智能查询技术来识别附接的模块化部件。在各种情况下,外科系统使用电查询和机械致动查询的组合来确定附接部件的容量和/或能力。可以记录对查询的响应,并且/或者将该响应与存储在外科系统的存储器内的信息进行比较,以建立与所识别的模块化附件相关联的基线操作参数。在各种情况下,将所建立的基线参数存储在外科系统的存储器内,以在将来识别相同或类似的模块化附件时使用。The surgical system is configured to be able to identify attached modular components using adaptive and/or intelligent query techniques. In various cases, the surgical system uses a combination of electrical and mechanically actuated queries to determine the capacity and/or capability of the attached components. Responses to the query can be recorded and/or compared to information stored in memory of the surgical system to establish baseline operating parameters associated with the identified modular accessories. In each case, the established baseline parameters are stored within the surgical system's memory for future use in identifying the same or similar modular accessories.
在各种情况下,将电查询信号从外科器械的柄部发送到附接的模块化部件,其中发送该电查询信号是为了确定附接的模块化部件的标识、操作参数和/或状态。附接的模块化部件被配置成能够发送具有识别信息的响应信号。在各种情况下,未接收到对查询信号的响应,并且/或者响应信号包括不可识别的信息。在此类情况下,外科器械可以执行默认功能以便评估附接的模块化部件的能力。该默认功能由保守操作参数来限定。换句话说,在默认功能的执行期间使用的默认操作参数被限定为特定水平,以便避免对外科器械和/或附接的模块化部件造成损伤、对患者造成伤害和/或对用户造成伤害。外科器械被配置成能够利用默认功能的结果来设置特定于附接的模块化部件的操作程序。In various cases, an electrical interrogation signal is sent from the handle of the surgical instrument to the attached modular component, wherein the electrical interrogation signal is sent to determine the identity, operating parameters and/or status of the attached modular component. The attached modular component is configured to transmit a response signal with identifying information. In various cases, no response to the query signal is received, and/or the response signal includes unidentifiable information. In such cases, the surgical instrument may perform default functions in order to assess the capabilities of the attached modular components. The default functionality is defined by conservative operating parameters. In other words, the default operating parameters used during execution of the default functions are defined to certain levels in order to avoid injury to the surgical instrument and/or attached modular components, injury to the patient, and/or injury to the user. The surgical instrument is configured to be able to use the results of the default functions to set operating procedures specific to the attached modular components.
例如,外科器械可以执行组织切割行程,其中切割构件从近侧位置朝向远侧位置横穿附接的端部执行器。在外科器械无法识别附接的端部执行器的情况下,外科器械被配置成能够使用默认操作参数来执行组织切割行程。利用切割构件在组织切割行程结束时在端部执行器内的位置,外科器械可以确定与附接的端部执行器相关联和/或适合利用该附接的端部执行器完成的组织切割行程的长度。外科器械被配置成能够记录切割构件的最远侧位置,以便设置与附接的端部执行器相关联的另外的操作参数。此类另外的操作参数包括例如在组织切割行程期间切割元件的速度和/或端部执行器的长度。For example, a surgical instrument may perform a tissue cutting stroke in which the cutting member traverses the attached end effector from a proximal position toward a distal position. In the event that the surgical instrument cannot recognize the attached end effector, the surgical instrument is configured to be able to perform a tissue cutting stroke using default operating parameters. Using the position of the cutting member within the end effector at the end of the tissue cutting stroke, the surgical instrument can determine the tissue cutting stroke associated with and/or suitable for completion with the attached end effector length. The surgical instrument is configured to record the distal-most position of the cutting member in order to set additional operating parameters associated with the attached end effector. Such additional operating parameters include, for example, the speed of the cutting element and/or the length of the end effector during the tissue cutting stroke.
默认功能还可用于确定附接的模块化部件的一种和/或多种当前状态。例如,可以执行默认功能来确定附接的端部执行器是否进行关节运动和/或附接的端部执行器进行关节运动的程度。然后,外科器械被配置成能够相应地调节控制程序。当端部执行器跨一系列关节运动角度进行关节运动时,切割行程的长度改变。换句话说,与当端部执行器处于非关节运动状态时相比,当端部执行器处于关节运动状态时,切割行程的长度不同。外科器械被配置成能够更新控制程序,以执行跨越与最后检测到的全行程相关联的长度的切割行程。外科器械被进一步配置成能够使用最后完成的切割行程的长度来确定:与当端部执行器进行关节运动时相比,当端部执行器进行非关节运动时,切割行程的全长是否是利用当前控制程序来实现和/或完成的。Default functions may also be used to determine one and/or more current states of attached modular components. For example, a default function may be performed to determine whether the attached end effector is articulating and/or the degree to which the attached end effector is articulating. The surgical instrument is then configured to adjust the control program accordingly. The length of the cutting stroke changes as the end effector articulates across a range of articulation angles. In other words, the length of the cutting stroke is different when the end effector is articulated than when the end effector is in the non-articulating state. The surgical instrument is configured to update the control program to perform a cutting stroke that spans the length associated with the last detected full stroke. The surgical instrument is further configured to be able to use the length of the last completed cutting stroke to determine whether the full length of the cutting stroke is utilized when the end effector is unarticulated compared to when the end effector is articulated The current control program is implemented and/or completed.
在各种情况下,外科系统可以执行对附接部件的特征的智能评估。这种特征包括例如组织垫磨损、附件使用程度和/或附件的操作条件。换句话说,外科系统被配置成能够评估附接的部件的功能和/或条件。在检测到附接的模块化部件的特征后,相应地调节用于操作外科系统的控制程序。In various cases, the surgical system may perform an intelligent assessment of the characteristics of the attached components. Such characteristics include, for example, tissue pad wear, degree of accessory usage, and/or operating conditions of the accessory. In other words, the surgical system is configured to be able to assess the function and/or condition of the attached components. After the features of the attached modular components are detected, the control program for operating the surgical system is adjusted accordingly.
外科器械包括位于端部执行器的钳口上的一个或多个组织垫。众所周知,组织垫通常会例如由于当其间不存在组织时与刀片的摩擦接合而易于随时间损耗和磨损。例如,外科器械被配置成能够通过分析剩余的组织垫厚度和/或刚度来确定组织垫磨损的程度。利用组织垫的所确定的状态,外科器械相应地调节控制程序。例如,控制程序可以基于组织垫的所确定的状态来更改外科器械的施加的压力和/或功率水平。在各种情况下,响应于组织垫的检测到的厚度(其小于阈值厚度),外科器械的处理器可以自动降低外科器械的功率水平。The surgical instrument includes one or more tissue pads on the jaws of the end effector. It is well known that tissue pads are often prone to wear and wear over time, for example due to frictional engagement with the blade when no tissue is present therebetween. For example, the surgical instrument is configured to be able to determine the degree of tissue pad wear by analyzing the remaining tissue pad thickness and/or stiffness. Using the determined state of the tissue pad, the surgical instrument adjusts the control program accordingly. For example, the control program may alter the applied pressure and/or power level of the surgical instrument based on the determined state of the tissue pad. In various cases, in response to the detected thickness of the tissue pad, which is less than the threshold thickness, the processor of the surgical instrument may automatically reduce the power level of the surgical instrument.
外科器械包括组合电外科功能,其中该外科器械包括端部执行器,该端部执行器包括第一钳口和第二钳口。第一钳口和第二钳口中的至少一者被配置成能够朝向彼此运动以使端部执行器在打开构型与闭合构型之间转变。第一钳口和第二钳口包括设置在其上的电极。电外科器械包括一个或多个功率发生器,该一个或多个功率发生器被配置成能够向电极供应功率以为这些电极供能。外科器械可以通过在端部执行器处于闭合构型并且没有任何患者组织位于其间时测量阻抗,来评估端部执行器钳口中的一个或多个端部执行器钳口上的炭化和/或组织污染的程度。预先确定的阻抗可以存储在外科器械的存储器内,其中如果阻抗超过预先确定的阈值,则钳口在其上包括不期望水平的炭化和/或组织污染。如本文更详细地讨论的,可以在检测到不期望水平的炭化后向用户发出警示。在各种情况下,响应于检测到的闭合钳口阻抗,外科器械和/或外科集线器的处理器可以自动调节操作参数。例如,此类操作参数包括功率水平、所施加的压力水平和/或高级组织切割参数。A surgical instrument includes combined electrosurgical functionality, wherein the surgical instrument includes an end effector including a first jaw and a second jaw. At least one of the first jaw and the second jaw is configured to be movable toward each other to transition the end effector between an open configuration and a closed configuration. The first jaw and the second jaw include electrodes disposed thereon. The electrosurgical instrument includes one or more power generators configured to supply power to the electrodes to energize the electrodes. The surgical instrument can assess charring and/or tissue contamination on one or more of the end effector jaws by measuring impedance when the end effector is in a closed configuration and without any patient tissue in between Degree. The predetermined impedance may be stored within the memory of the surgical instrument, where the jaws include an undesirable level of charring and/or tissue contamination thereon if the impedance exceeds a predetermined threshold. As discussed in greater detail herein, an alert may be issued to the user upon detection of an undesired level of charring. In various cases, in response to the detected closing jaw impedance, the processor of the surgical instrument and/or the surgical hub may automatically adjust operating parameters. For example, such operating parameters include power levels, applied pressure levels, and/or advanced tissue cutting parameters.
如图29所示,图形表示28500示出了测量的阻抗28250与多个激活周期28510之间的关系28530。在任何能量激活(n=0激活)之前,测量基线阻抗并将其记录在存储器内。如上文所讨论的,在外科器械的端部执行器处于闭合构型并且没有患者组织位于其间时测量阻抗。外科器械和/或外科集线器提示用户将端部执行器转变成闭合构型,以便测量闭合钳口阻抗。例如,可以预定义的激活间隔(诸如n=5、10、15等)递送此类提示。随着炭化和/或组织污染在端部执行器的钳口上积聚,阻抗增加。在等于和/或高于第一预先确定的水平28540时,外科器械和/或外科集线器被配置成能够向用户警示这种炭化积聚并且建议用户清洁端部执行器。在等于和/或高于第二预先确定的水平28550时,外科器械和/或外科集线器可以防止用户在端部执行器被清洁之前使用外科器械的各种操作功能。假设测量的阻抗已经降低到可接受的水平,那么可以在清洁端部执行器后移除操作锁定。As shown in FIG. 29, a
如上文所讨论的,外科集线器和/或外科器械被配置成能够当满足和/或超过预先确定的阻抗时向用户发出警示。可通过各种形式的反馈来传送这种提醒,包括例如触觉反馈、声音反馈和/或视觉反馈。在至少一种情况下,该反馈包括音频反馈,并且外科器械可包括当检测到错误时发出声音诸如例如蜂鸣声的扬声器。在某些情况下,该反馈包括视觉反馈,并且外科器械可包括发光二极管(LED),例如,该LED在检测到错误时闪烁。在某些情况下,可以通过在显示监视器上呈现在用户的视野内的警示向用户传送视觉反馈。在各种情况下,该反馈包括触觉反馈,并且外科器械可以包括电动马达,该电动马达包括在检测到错误时振动的偏心元件。该提醒可以是特定的或通用的。例如,该警示可以具体指明闭合钳口阻抗超过预先确定的水平,或者该警示可以具体指明测量的阻抗。As discussed above, the surgical hub and/or surgical instrument are configured to alert the user when a predetermined impedance is met and/or exceeded. Such reminders may be delivered through various forms of feedback, including, for example, haptic feedback, audible feedback, and/or visual feedback. In at least one instance, the feedback includes audio feedback, and the surgical instrument may include a speaker that emits a sound such as, for example, a beep when an error is detected. In some cases, the feedback includes visual feedback, and the surgical instrument may include a light emitting diode (LED) that flashes when an error is detected, for example. In some cases, visual feedback may be conveyed to the user by an alert presented on the display monitor within the user's field of view. In various cases, the feedback includes haptic feedback, and the surgical instrument may include an electric motor including an eccentric element that vibrates when an error is detected. The reminder can be specific or generic. For example, the alert may specify that the closed jaw impedance exceeds a predetermined level, or the alert may specify the measured impedance.
在各种情况下,外科器械和/或外科集线器被配置成能够检测参数诸如集成轴拉伸、损伤和/或公差叠堆,以补偿机动致动器的功能参数操作。外科器械被配置成能够当附接的端部执行器和/或轴的检测到的参数接近特定于附接的部件的期望操作范围和/或在该期望操作范围之外时向用户发出警示。除了警示用户之外,在各种情况下,当检测到外科器械无法在调节的预定义包络内操作时,阻止外科器械的操作。外科器械和/或外科集线器包括超控装置,其中允许用户在某些预定义条件下超控锁定。此类预定义条件包括:紧急情况、在无法使用外科器械将对患者造成伤害的外科手术期间该外科器械当前正在使用中,以及一次性超控允许用户自行决定再使用一次外科器械。在各种情况下,超控还用于允许用户执行与主要端部执行器功能无关的次要端部执行器功能。例如,如果外科器械阻止端部执行器的钳口进行关节运动,则用户可以激活超控来允许外科器械使端部执行器进行关节运动。In various cases, the surgical instrument and/or the surgical hub is configured to be able to detect parameters such as integrated shaft stretch, damage, and/or tolerance stacks to compensate for the functional parameter operation of the motorized actuator. The surgical instrument is configured to alert the user when detected parameters of the attached end effector and/or shaft are approaching and/or outside a desired operating range specific to the attached component. In addition to alerting the user, under various conditions, operation of the surgical instrument is prevented when it is detected that the surgical instrument cannot operate within the adjusted predefined envelope. Surgical instruments and/or surgical hubs include an override device that allows a user to override locking under certain predefined conditions. Such predefined conditions include emergency situations, surgical instruments that are currently in use during a surgical procedure where the inability to use the surgical instrument would cause harm to the patient, and a one-time override that allows the surgical instrument to be used again at the user's discretion. In various cases, overrides are also used to allow the user to perform secondary end effector functions unrelated to the primary end effector function. For example, if the surgical instrument prevents the jaws of the end effector from articulating, the user may activate an override to allow the surgical instrument to articulate the end effector.
外科系统可以调整被配置成能够响应于检测到的器械致动参数、能量发生器参数和/或用户输入而操作外科器械的控制程序。将外科器械的确定状态与用户输入结合使用来调整控制程序。例如,外科器械的确定状态可以包括端部执行器是否处于其打开构型、端部执行器是否处于其闭合构型以及/或者组织阻抗是否是可检测的。外科器械的确定状态可以包括多于一个检测到的特征。例如,可以使用两个或更多个测量的组合、一系列有序操作和/或基于熟悉的用户输入的情景使用而对该熟悉的用户输入做出的解读来评估外科器械的确定状态。例如,控制程序被配置成能够调节外科器械的各种功能,诸如功率水平、功率的逐步上升或逐步下降和/或各种马达控制参数。The surgical system may adjust a control program configured to operate a surgical instrument in response to detected instrument actuation parameters, energy generator parameters, and/or user input. The determined state of the surgical instrument is used in conjunction with user input to adjust the control program. For example, the determined state of the surgical instrument may include whether the end effector is in its open configuration, whether the end effector is in its closed configuration, and/or whether tissue impedance is detectable. The determined state of the surgical instrument may include more than one detected characteristic. For example, a combination of two or more measurements, a sequence of sequential operations, and/or interpretations of familiar user input based on contextual use of the familiar user input may be used to assess the determined state of the surgical instrument. For example, the control program is configured to adjust various functions of the surgical instrument, such as power levels, step-up or step-down of power, and/or various motor control parameters.
外科系统包括外科器械,该外科器械包括组合电外科功能,其中该外科器械包括端部执行器,该端部执行器包括其上设置有电极的第一钳口和第二钳口。电外科器械包括一个或多个功率发生器,该一个或多个功率发生器被配置成能够向电极供应功率以为这些电极供能。更具体地,通过被配置成能够在单极模式、双极模式和/或具有交替或混合的双极和单极能量的组合模式下递送能量的电极来实现向支撑在第一钳口与第二钳口之间的患者组织的能量递送。如本文更详细地所述的,外科系统可以基于外科器械的各种监测参数来调整该一个或多个发生器的能量功率激活水平。A surgical system includes a surgical instrument including combined electrosurgical functionality, wherein the surgical instrument includes an end effector including first and second jaws having electrodes disposed thereon. The electrosurgical instrument includes one or more power generators configured to supply power to the electrodes to energize the electrodes. More specifically, the support to the first jaw and the second is accomplished by electrodes configured to deliver energy in a monopolar mode, a bipolar mode, and/or a combined mode with alternating or mixed bipolar and monopolar energies. Energy delivery to patient tissue between two jaws. As described in greater detail herein, the surgical system may adjust the energy power activation level of the one or more generators based on various monitored parameters of the surgical instrument.
外科系统被配置成能够基于器械监测参数来调整能量功率激活。在各种情况下,外科系统可以监测激活各种外科器械功能的序列。然后,外科系统可以基于外科器械功能的激活来自动调节各种操作参数。例如,外科系统可以监测旋转和/或关节运动控件的激活,并且防止外科器械能够在此类次要非夹紧控件正在使用中时向患者组织递送能量。The surgical system is configured to be able to adjust energy power activation based on the instrument monitoring parameters. In various cases, the surgical system may monitor the sequence of activation of various surgical instrument functions. The surgical system can then automatically adjust various operating parameters based on activation of surgical instrument functionality. For example, the surgical system may monitor activation of rotational and/or articulation controls and prevent the surgical instrument from being able to deliver energy to patient tissue while such secondary unclamping controls are in use.
在各种情况下,例如,外科系统可以调整器械功率水平来补偿检测到的操作参数,诸如不足的电池和/或马达驱动功率水平。例如,检测到不足的电池和/或马达驱动功率水平可以向外科系统指示端部执行器的夹紧强度受到影响和/或受损,从而导致对位于其间的患者组织的不期望控制。In various circumstances, for example, the surgical system may adjust instrument power levels to compensate for detected operating parameters, such as insufficient battery and/or motor drive power levels. For example, detection of insufficient battery and/or motor drive power levels may indicate to the surgical system that the clamping strength of the end effector is compromised and/or compromised, resulting in undesired control of patient tissue therebetween.
外科系统可以记录外科器械在使用期间的与特定预期功能相关联的操作参数。然后,外科系统可以例如在该外科系统识别到正在执行特定预期功能时使用所记录的操作参数来调整能量功率水平和/或外科器械模式。换句话说,外科系统可以在识别到外科器械的期望功能时利用所存储的优选操作参数来自动调节能量功率水平和/或外科器械模式,并且/或者外科器械可以为了支持和补充期望的功能而调节能量功率水平和/或外科器械模式。例如,外科系统可以通过施加单极功率来增补轴上的检测到的侧向负载,因为在轴上的检测到的侧向负载通常是由于在端部执行器处于其闭合构型的情况下的研磨解剖而产生的。外科系统决定施加单极功率,因为该外科系统通过先前的程序和/或通过存储在存储器中的信息知道单极功率导致改进的解剖。在各种情况下,外科系统被配置成能够与检测到的侧向负载的增加成比例地施加单极功率。The surgical system may record operating parameters of the surgical instrument during use that are associated with certain intended functions. The surgical system may then use the recorded operating parameters to adjust energy power levels and/or surgical instrument modes, eg, when the surgical system recognizes that a particular intended function is being performed. In other words, the surgical system may utilize the stored preferred operating parameters to automatically adjust the energy power level and/or the surgical instrument mode upon identification of the desired function of the surgical instrument, and/or the surgical instrument may be adapted to support and supplement the desired function Adjust the energy power level and/or surgical instrument mode. For example, the surgical system may supplement the detected side load on the shaft by applying monopolar power, since the detected side load on the shaft is usually due to the situation with the end effector in its closed configuration Produced by grinding dissection. The surgical system decides to apply monopolar power because the surgical system knows, through previous procedures and/or through information stored in memory, that monopolar power results in improved anatomy. In various cases, the surgical system is configured to apply monopolar power in proportion to the detected increase in side load.
外科系统可以调整被配置成能够响应于检测到的端部执行器参数而操作外科器械的控制程序。如图30所示,外科器械可以利用测量的组织电导率来自动修改间隙夹紧控制程序。例如,在两个频率诸如50kHz和5MHz下测量组织电导率。低频电导率(GE)由细胞外液驱动,而高频电导率(GI)由细胞内液驱动。例如,当细胞受损时,细胞内液水平发生变化。端部执行器能够以打开构型和闭合构型配置。因此,当从其打开构型朝向其闭合构型促动端部执行器时,该端部执行器的钳口压缩位于其间的组织。在组织压缩期间,可以检测和/或记录两个频率之间的电导率的变化。外科系统被配置成能够基于低频电导率(GE)与高频电导率(GI)的比率来调整控制程序,以控制端部执行器夹紧压缩。外科系统调整控制程序直到接近离散的预先确定的点和/或直到接近转折点,由此该预先确定的点和/或转折点指示细胞损伤可能就在附近。The surgical system may adjust a control program configured to operate the surgical instrument in response to the detected end effector parameters. As shown in Figure 30, the surgical instrument can utilize the measured tissue conductivity to automatically modify the gap clamping control program. For example, tissue conductivity is measured at two frequencies such as 50 kHz and 5 MHz. The low-frequency conductivity (GE) is driven by the extracellular fluid, while the high-frequency conductivity (GI) is driven by the intracellular fluid. For example, when cells are damaged, intracellular fluid levels change. The end effector can be configured in an open configuration and a closed configuration. Thus, when the end effector is actuated from its open configuration toward its closed configuration, the jaws of the end effector compress the tissue therebetween. During tissue compression, the change in conductivity between the two frequencies can be detected and/or recorded. The surgical system is configured to be able to adjust a control program based on the ratio of low frequency electrical conductivity (GE) to high frequency electrical conductivity (GI) to control end effector clamping compression. The surgical system adjusts the control program until a discrete predetermined point is approached and/or until a turning point is approached, whereby the predetermined point and/or turning point indicates that cellular damage may be imminent.
更具体地,图30是在钳口夹紧行程的持续时间29010内,测量的组织电导率29100、低频电导率与高频电导率的比率29200、钳口孔的尺寸29300与钳口马达力29400之间的关系的图形表示29000。在钳口夹紧行程开始时,由于端部执行器的钳口与患者组织初始接触,因此测量的组织电导率最低,并且当端部执行器处于其打开构型时,钳口孔29300处于其最大值。至少部分地由于从位于钳口之间的组织向钳口提供的小量的电阻,钳口马达力在钳口夹紧行程开始时较低。在压缩之前,但在患者组织与端部执行器的钳口之间存在接触之后,低频电导率29110增加,这指示所捕获的组织内存在细胞外液。类似地,在压缩之前,但在患者组织与端部执行器的钳口之间存在接触之后,高能量电导率29120增加,这指示存在细胞内液。More specifically, Figure 30 is the measured
当端部执行器开始朝向其闭合构型运动时,端部执行器的钳口开始夹紧位于其间的组织,并且因此钳口孔29300继续减小。钳口开始压缩组织;然而,在液体开始从被压缩的组织排出之前,不希望患者组织被外科器械密封。钳口马达力在钳口夹紧行程期间继续增加,因为所捕获的组织去除了对端部执行器钳口的增加的阻力。As the end effector begins to move toward its closed configuration, the jaws of the end effector begin to grip tissue therebetween, and thus the
在细胞外液的初始排出引起低频电导率(GE)29110降低之后,低频电导率(GE)29110在钳口夹紧行程期间保持相对恒定。高频电导率(GI)29120在钳口夹紧行程期间保持相对恒定,直到患者组织被密封之后为止。当在密封完成之后继续压缩组织时,会发生细胞内组织损伤并且排出细胞内液。此时,高频电导率29120降低,从而导致低频电导率与高频电导率的比率29210达到峰值。组织损伤阈值29220被预先确定为当低频电导率与高频电导率的比率29210中的峰值达到和/或超过组织损伤阈值29220时,向用户警示和/或自动提示外科系统修改操作参数。此时,外科系统被配置成能够修改控制程序来停止朝向端部执行器的闭合构型促动端部执行器的钳口并且/或者开始朝向端部执行器的打开构型往回促动端部执行器的钳口。在各种情况下,外科系统被配置成能够修改控制程序来减小钳口夹紧力。对控制程序的这种调整防止了另外的组织损伤。After the initial expulsion of extracellular fluid causes the low frequency electrical conductivity (GE) 29110 to decrease, the low frequency electrical conductivity (GE) 29110 remains relatively constant during the jaw clamping stroke. The high frequency conductivity (GI) of the 29120 remains relatively constant during the jaw clamping stroke until after the patient tissue is sealed. When tissue compression continues after sealing is complete, intracellular tissue damage occurs and intracellular fluid is drained. At this point, the
外科系统被配置成能够基于协作双输入来修改控制程序。更具体地,外科系统可以基于用户输入和预定义设置来改变马达致动速率。例如,用户向柄部控件施加的力越大,马达被致动以触发系统的速度越快。在各种情况下,可以使用柄部控件来根据外科系统的情景使用向该外科系统传送不同命令。更具体地,外科系统可以监测和/或记录特定用户输入。可以针对特定用户输入的长度、持续时间和/或可以用于区分输入的任何合适的特征来分析特定用户输入。例如,外科器械的柄部可以包括触发器,其中该触发器被配置成能够控制轴旋转。在各种情况下,触发器的更快致动对应于轴旋转的速率的增加;然而,马达的最大力(电流)阈值保持恒定。在其他情况下,触发器的更快致动对应于所施加的力的增加,而旋转速度阈值保持不变。可以通过轴旋转速度来进一步区分这种控制,该轴旋转速度基于用户致动触发器的持续时间而增加,而力基于该触发器被致动的速率。The surgical system is configured to be able to modify the control program based on the cooperating dual inputs. More specifically, the surgical system may vary the motor actuation rate based on user input and predefined settings. For example, the more force the user applies to the handle control, the faster the motor is actuated to trigger the system. In various cases, handle controls may be used to communicate different commands to the surgical system depending on its contextual use. More specifically, the surgical system may monitor and/or record certain user inputs. A particular user input may be analyzed for its length, duration, and/or any suitable characteristics that may be used to differentiate the input. For example, the handle of the surgical instrument may include a trigger, wherein the trigger is configured to control shaft rotation. In each case, faster actuation of the trigger corresponds to an increase in the rate of shaft rotation; however, the maximum force (current) threshold of the motor remains constant. In other cases, faster actuation of the trigger corresponds to an increase in the applied force, while the rotational speed threshold remains unchanged. This control can be further differentiated by the shaft rotation speed, which increases based on the duration that the trigger is actuated by the user, and the force based on the rate at which the trigger is actuated.
在各种情况下,马达致动控制基于预定义设置和对器械操作参数和/或用户控制参数的检测的组合。图31是实际钳口闭合速度29520与由用户输入指示的触发器速度29510之间的关系的图形表示29500。仅由于对应的用户输入29510而产生的钳口闭合速度29520由第一线29530表示。当用户输入触发器速度29510增加时,钳口闭合速度29520也增加。在不考虑任何另外的参数的情况下确定这种关系29530。由于对应的用户输入29510和对位于端部执行器的钳口之间的厚组织的确定而产生的钳口闭合速度29520由第二线29540表示。当用户输入触发器速度29510增加时,钳口闭合速度29520也增加;然而,钳口闭合速度29520小于在仅考虑用户输入触发器速度的情况下的钳口闭合速度。另外的考虑因素—组织厚度减慢了钳口闭合速度,以便防止例如对患者组织和/或外科器械造成损伤。In each case, motor actuation control is based on a combination of predefined settings and detection of instrument operating parameters and/or user control parameters. Figure 31 is a
外科系统包括许多部件。例如,外科系统包括许多手持式外科器械、外科集线器和外科机器人。在各种情况下,外科系统的每个部件与其他部件通信并且可以发出命令,并且/或者可以基于至少一个监测的参数和/或用户输入来更改控制程序。外科系统包括用于确定哪个系统在负责并且哪个系统做出部分操作决策的装置。可以基于情景感知、预先确定事件的发生和/或超过阈值来改变该指定。在各种情况下,可以在外科系统内建立命令协议来指示每个部件能够发出的命令的类型以及/或者该发出部件可以将命令引导到外科系统内的哪些部件。Surgical systems include many components. For example, surgical systems include many hand-held surgical instruments, surgical hubs, and surgical robots. In various cases, each component of the surgical system is in communication with the other components and can issue commands and/or can change the control program based on at least one monitored parameter and/or user input. The surgical system includes means for determining which system is responsible and which system makes part of the operational decision. The designation may be changed based on contextual awareness, the occurrence of a predetermined event, and/or the exceeding of a threshold. In various cases, a command protocol can be established within the surgical system to indicate the types of commands each component can issue and/or which components within the surgical system the issuing component can direct the commands to.
命令协议可以使用预定义阈值来确定何时授权控制权转交。例如,外科系统包括发生器和手持式外科器械,包括其中的各种控件。在外科手术开始时,初始是发生器在控制,并且该发生器基于检测到的阻抗来调整功率。发生器使用检测到的阻抗和/或当前功率水平来命令外科器械的柄部内的压力控件遵循特定压力需求。在外科手术期间的某个时间,超过较低阻抗阈值,这指示发生器算法已经检测到电短路。发生器通过指示压力控件确定组织是否仍位于端部执行器的钳口之间来将控制传递给柄部内的压力控件。然后,压力控件能够确定适合的组织压缩,并且可以传送信息—哪种功率水平和/或能量模态最适合用于检测到的组织。The command protocol may use predefined thresholds to determine when to authorize the transfer of control. For example, surgical systems include generators and hand-held surgical instruments, including various controls therein. At the beginning of a surgical procedure, the generator is initially in control, and the generator adjusts power based on the detected impedance. The generator uses the detected impedance and/or the current power level to command a pressure control within the handle of the surgical instrument to follow a specific pressure requirement. At some point during the surgical procedure, the lower impedance threshold is exceeded, indicating that the generator algorithm has detected an electrical short. The generator transfers control to the pressure control within the handle by instructing the pressure control to determine whether tissue is still between the jaws of the end effector. The pressure control can then determine the appropriate tissue compression and can communicate which power level and/or energy modality is best for the detected tissue.
可以基于由外科系统内的部件中的多个部件达成的共识来确定控制协议。例如,外科系统内的三个部件检测与监测参数相关的第一值,而外科系统内的两个部件检测与相同监测参数相关的第二值,其中第一值和第二值是不同的。三个部件的组比两个部件的组包括更多部件,并且因此监测参数控件的第一值更多。外科系统内的每个部件可以在层级结构内被分配有位置。可以基于特定部件的可靠性和/或特定部件的能力来建立层级结构。第一部件检测与监测参数相关的第一值,并且第二部件检测与相同监测参数相关的第二值,其中第一值与第二值不同。在外科系统的层级结构内,第二部件“级别高于”第一部件,并且因此由第二部件控件检测到的监测参数的第二值级别更高。The control protocol may be determined based on consensus reached by a plurality of the components within the surgical system. For example, three components within the surgical system detect a first value associated with a monitored parameter, while two components within the surgical system detect a second value associated with the same monitored parameter, where the first and second values are different. A three-part set includes more parts than a two-part set, and therefore more first values of the monitoring parameter controls. Each component within the surgical system may be assigned a position within the hierarchy. Hierarchies may be established based on the reliability of specific components and/or the capabilities of specific components. The first component detects a first value related to a monitored parameter, and the second component detects a second value related to the same monitored parameter, wherein the first value is different from the second value. Within the hierarchy of the surgical system, the second component is "higher" than the first component, and therefore the second value of the monitored parameter detected by the second component control is of a higher level.
本文所述主题的各个方面在以下实施例中阐述:Various aspects of the subject matter described herein are set forth in the following examples:
实施例集1Example set 1
实施例1—一种外科系统,所述外科系统包括外科器械、被配置成能够向端部执行器供应功率的发生器和被配置成能够运行控制程序以操作所述外科系统的处理器。所述外科器械包括所述端部执行器,所述端部执行器包括第一钳口和第二钳口。所述第一钳口和所述第二钳口中的至少一者相对于彼此在打开位置和闭合位置之间运动。组织被配置成能够位于所述第一钳口与所述第二钳口之间。所述处理器被配置成能够:检测所述外科系统的第一参数,检测至少一个用户输入,并且响应于所述检测到的第一参数和所述至少一个用户输入而修改所述控制程序。
实施例2—根据实施例1所述的外科系统,其中所述控制程序被配置成能够控制所述发生器的功率水平。
实施例3—根据实施例1或2所述的外科系统,其中所述控制程序被配置成能够控制马达,其中所述马达被配置成能够使所述端部执行器在所述打开构型与所述闭合构型之间运动。
实施例4—根据实施例3所述的外科系统,其中所述控制程序被配置成能够通过马达控制参数来控制所述马达,并且其中所述控制程序被配置成能够响应于所述检测到的第一参数和所述检测到的用户输入而调节所述马达控制参数。
实施例5—根据实施例1、2、3或4所述的外科系统,其中所述第一参数包括器械致动参数。
实施例6—根据实施例1、2、3、4或5所述的外科系统,其中所述第一参数包括发生器操作参数。Embodiment 6—The surgical system of
实施例7—根据实施例1、2、3、4、5或6所述的外科系统,其中所述第一参数包括所述端部执行器的状态。
实施例8—根据实施例1、2、3、4、5、6或7所述的外科系统,其中所述第一参数指示所述端部执行器是处于所述打开构型还是所述闭合构型。Embodiment 8—The surgical system of
实施例9—根据实施例1、2、3、4、5、6或7所述的外科系统,其中所述第一参数指示所述组织是否位于所述第一钳口与所述第二钳口之间。Embodiment 9—The surgical system of
实施例10—根据实施例1、2、3、4、5、6、7、8或9所述的外科系统,其中所述外科器械在进行操作控制,并且其中所述发生器默认是从属控制系统。
实施例11—根据实施例1、2、3、4、5、6、7、8或9所述的外科系统,其中所述控制程序被配置成能够响应于所述检测到的第一参数和所述检测到的用户输入而使所述发生器进行操作控制并且使所述外科器械为所述从属控制系统。Embodiment 11—The surgical system of
实施例12—根据实施例1、2、3、4、5、6、7、8、9、10或11所述的外科系统,其中所述第一参数包括两个测量的组合。Embodiment 12—The surgical system of
实施例13—根据实施例1、2、3、4、5、6、7、8、9、10、11或12所述的外科系统,其中所述外科系统还包括触发器,所述触发器被配置成能够接收所述用户输入,其中所述处理器被配置成能够解读由所述触发器接收的多个用户输入,其中每个用户输入包括基于情景使用的不同含义。Embodiment 13—The surgical system of
实施例14—一种外科系统,所述外科系统包括外科器械、被配置成能够向所述外科器械供应功率的发生器和被配置成能够运行控制程序以操作所述外科系统的处理器。所述处理器被配置成能够:检测所述外科器械的状态,检测至少一个用户输入,并且响应于所述检测到的外科器械的状态和所述至少一个用户输入而调整所述控制程序。
实施例15—根据实施例14所述的外科系统,其中所述外科器械包括端部执行器,其中所述端部执行器能够以打开构型和闭合构型配置,并且其中所述外科器械的所述状态对应于所述端部执行器是处于所述打开构型还是所述闭合构型。
实施例16—根据实施例14或15所述的外科系统,其中所述外科器械包括端部执行器,其中所述端部执行器能够以打开构型和闭合构型配置,并且其中所述外科器械的所述状态对应于患者组织是否位于所述第一钳口与所述第二钳口之间。Embodiment 16—The surgical system of
实施例17—根据实施例14、15或16所述的外科系统,其中所述外科系统还包括输入构件,所述输入构件被配置成能够接收所述用户输入,其中所述处理器被配置成能够解读由所述输入构件接收的多个用户输入,其中所接收的每个用户输入包括基于所述外科系统的情景使用的不同含义。Embodiment 17—The surgical system of
实施例18—一种外科系统,所述外科系统包括外科器械、被配置成能够向端部执行器供应功率的发生器和被配置成能够运行控制程序以操作所述外科系统的处理器。所述外科器械包括所述端部执行器,所述端部执行器包括第一钳口和第二钳口。所述第一钳口和所述第二钳口中的至少一者相对于彼此在打开位置和闭合位置之间运动。组织被配置成能够位于所述第一钳口与所述第二钳口之间。所述处理器被配置成能够:检测所述外科器械的第一参数,检测所述发生器的第二参数,检测至少一个用户输入,并且响应于所述检测到的第一参数、所述检测到的第二参数和所述至少一个用户输入而修改所述控制程序。Embodiment 18—A surgical system comprising a surgical instrument, a generator configured to supply power to an end effector, and a processor configured to execute a control program to operate the surgical system. The surgical instrument includes the end effector including a first jaw and a second jaw. At least one of the first jaw and the second jaw moves relative to each other between an open position and a closed position. Tissue is configured to be positioned between the first jaw and the second jaw. The processor is configured to: detect a first parameter of the surgical instrument, detect a second parameter of the generator, detect at least one user input, and in response to the detected first parameter, the detection The control program is modified based on the obtained second parameter and the at least one user input.
实施例19—根据实施例18所述的外科系统,其中所述外科器械的所述第一参数对应于所述端部执行器是处于所述打开构型还是所述闭合构型并且患者组织是否位于所述第一钳口与所述第二钳口之间。Embodiment 19—The surgical system of Embodiment 18, wherein the first parameter of the surgical instrument corresponds to whether the end effector is in the open configuration or the closed configuration and whether patient tissue between the first jaw and the second jaw.
实施例20—根据实施例18或19所述的外科系统,其中所述外科器械还包括输入构件,所述输入构件被配置成能够接收所述用户输入,其中所述处理器被配置成能够解读由所述输入构件接收的多个用户输入,其中所接收的每个用户输入包括基于所述外科系统内的所述外科器械的情景使用的不同含义。
实施例集2Example set 2
实施例1—一种外科器械,所述外科器械包括外壳、轴组件、处理器和存储器。所述轴组件可替换地连接到所述外壳。所述外科组件包括端部执行器。所述存储器被配置成能够存储程序指令,所述程序指令当从所述存储器执行时使所述处理器:向所述附接的轴组件发送电查询信号;从所述附接的轴组件接收响应信号;当所述附接的轴组件未接收到响应信号时,使得执行默认功能;由于所述默认功能的所述执行而确定所述附接的轴组件的识别特征;以及基于所述附接的轴组件的所述识别特征来修改控制程序。
实施例2—根据实施例1所述的外科器械,其中所述识别特征包括所述附接的轴组件的剩余容量。
实施例3—根据实施例1或2所述的外科器械,其中所述识别特征包括所述附接的轴组件的性能水平。
实施例4—根据实施例1、2或3所述的外科器械,其中所述识别特征对于具有不同能力的附接的轴组件是不同的。
实施例5—根据实施例1、2、3或4所述的外科器械,其中所述存储器包括查找表,所述查找表包括与特定轴组件对应的操作参数,其中所述处理器利用所接收的响应信号来在所述查找表内识别所述附接的轴组件,并且其中所述控制程序使用与所识别的轴组件的所存储的操作参数来修改。
实施例6—根据实施例1、2、3、4或5所述的外科器械,其中所述存储器还包括程序指令,所述程序指令当被执行时使所述处理器将所述经修改的控制程序存储在所述存储器中。Embodiment 6—The surgical instrument of
实施例7—一种外科器械,所述外科器械包括外壳、轴组件、处理器和存储器。所述轴组件可替换地连接到所述外壳。所述外科组件包括端部执行器。所述存储器被配置成能够存储程序指令,所述程序指令当从所述存储器执行时使所述处理器:向所述附接的轴组件发送可变查询通信,基于对所述可变查询通信的响应来确定所述附接的轴组件的能力,以及基于所述附接的轴组件的所确定的能力来修改控制程序。
实施例8—根据实施例7所述的外科器械,其中所述可变查询通信包括所述外科器械的电查询信号和物理致动。Embodiment 8—The surgical instrument of
实施例9—根据实施例7或8所述的外科器械,其中监测所述外科器械的所述物理致动以确定所述附接的轴组件的功能能力。Embodiment 9—The surgical instrument of
实施例10—根据实施例7、8或9所述的外科器械,其中所确定的能力涉及所述轴组件的剩余容量。
实施例11—根据实施例7、8、9或10所述的外科器械,其中所确定的能力涉及所述轴组件的性能水平。Embodiment 11—The surgical instrument of
实施例12—根据实施例7、8、9、10或11所述的外科器械,其中要确定的所述能力基于所述连接的轴组件而不同。Embodiment 12—The surgical instrument of
实施例13—根据实施例7、8、9、10、11或12所述的外科器械,其中所述存储器还包括程序指令,所述程序指令当被执行时使所述处理器将所述经修改的控制程序和所确定的轴组件能力存储在所述存储器中。Embodiment 13—The surgical instrument of
实施例14—一种外科器械,所述外科器械包括外壳、轴组件、处理器和存储器。所述轴组件可互换地联接到所述外壳。所述外科组件包括端部执行器。所述存储器被配置成能够存储程序指令,所述程序指令当从所述存储器执行时使所述处理器:向联接到所述外壳的所述轴组件发送查询信号;从联接到所述外壳的所述轴组件接收响应信号;在未辨别出响应信号时,使得执行默认端部执行器功能;由于所述默认端部执行器功能的所述执行而确定联接到所述外壳的所述轴组件的识别特征;以及基于联接到所述外壳的所述轴组件的所述识别特征来修改控制程序。Embodiment 14 - A surgical instrument comprising a housing, a shaft assembly, a processor, and a memory. The shaft assembly is interchangeably coupled to the housing. The surgical assembly includes an end effector. The memory is configured to store program instructions that, when executed from the memory, cause the processor to: send an inquiry signal to the shaft assembly coupled to the housing; the shaft assembly receives a response signal; when the response signal is not identified, causing a default end effector function to be performed; determining the shaft assembly coupled to the housing as a result of the performance of the default end effector function and modifying a control program based on the identification feature of the shaft assembly coupled to the housing.
实施例15—根据实施例14所述的外科器械,其中因为所述处理器未接收到所述响应信号,所以所述处理器未辨别出所述响应信号。
实施例16—根据实施例14或15所述的外科器械,其中所述识别特征包括联接到所述外壳的所述轴组件的剩余容量。Embodiment 16—The surgical instrument of
实施例17—根据实施例14、15或16所述的外科器械,其中所述识别特征包括联接到所述外壳的所述轴组件的性能水平。Embodiment 17—The surgical instrument of
实施例18—根据实施例14、15、16或17所述的外科器械,其中所确定的特征能够基于可互换地联接到所述外壳的所述轴组件而不同。Embodiment 18—The surgical instrument of
实施例19—根据实施例14、15、16、17或18所述的外科器械,其中所述存储器包括查找表,所述查找表包括与特定轴组件对应的操作参数,其中所述处理器利用所接收的响应信号来在所述查找表内识别联接到所述外壳的所述轴组件,并且其中所述控制程序使用与所识别的轴组件的所存储的操作参数来修改。Embodiment 19—The surgical instrument of
实施例20—根据实施例14、15、16、17、18或19所述的外科器械,其中所述存储器还包括程序指令,所述程序指令当被执行时使所述处理器将所述经修改的控制程序存储在所述存储器中。
实施例集3Example set 3
实施例1—一种外科系统,所述外科系统包括外科集线器、外科器械、被配置成能够为端部执行器供能的发生器;和排烟系统,所述排烟系统被配置成能够从外科手术部位移除烟雾。所述外科器械包括所述端部执行器。控制命令直接从所述外科集线器传递到所述外科器械。所述外科器械被配置成能够以菊花链方式将从所述外科集线器接收的所述控制命令传递到所述发生器和所述排烟系统。Example 1—A surgical system comprising a surgical hub, a surgical instrument, a generator configured to power an end effector; and a fume extraction system configured to Remove fumes from the surgical site. The surgical instrument includes the end effector. Control commands are communicated directly from the surgical hub to the surgical instruments. The surgical instrument is configured to daisy-chain the control commands received from the surgical hub to the generator and the fume extraction system.
实施例2—根据实施例1所述的外科系统,其中所述外科器械被配置成能够利用由所述外科器械检测到的参数来修改所述控制命令。
实施例3—根据实施例2所述的外科系统,其中所述外科器械被配置成能够将所述经修改的控制命令传递到所述发生器。
实施例4—根据实施例2或3所述的外科系统,其中所述发生器的操作参数由所述经修改的控制命令控制。
实施例5—根据实施例2、3或4所述的外科系统,其中所述发生器被配置成能够利用由所述发生器检测到的第二参数来更改所述经修改的控制命令。
实施例6—根据实施例2、3、4或5所述的外科系统,其中所述外科器械被配置成能够将所述经修改的控制命令传递到所述外科集线器,并且其中所述外科集线器被配置成能够将所述经修改的控制命令传递到所述发生器。Embodiment 6—The surgical system of
实施例7—根据实施例1所述的外科系统,其中所述外科器械检测所述外科器械的第一参数,其中所述外科器械被配置成能够向所述发生器传送所述检测到的第一参数,并且其中所述发生器被配置成能够利用所述第一参数来修改所述控制命令。
实施例8—根据实施例1所述的外科系统,其中所述外科器械检测所述外科器械的第一参数,其中所述外科器械被配置成能够向所述发生器传送所述检测到的第一参数,其中所述发生器检测第二参数,并且其中所述发生器被配置成能够利用所述第一参数和所述第二参数来修改所述控制命令。Embodiment 8—The surgical system of
实施例9—根据实施例1、2、3、4、5、6、7或8所述的外科系统,还包括显示屏,所述显示屏被配置成能够显示外科手术部位的实时馈送和所述外科器械的第一操作参数。Embodiment 9—The surgical system of
实施例10—根据实施例9所述的外科系统,其中所述外科器械还包括器械显示器,所述器械显示器被配置成能够显示所述外科器械的第二操作参数,并且其中所述第一操作参数与所述第二操作参数相同。
实施例11—根据实施例9所述的外科系统,其中所述外科器械还包括器械显示器,所述器械显示器被配置成能够显示所述外科器械的第二操作参数,并且其中所述第一操作参数与所述第二操作参数不同。Embodiment 11—The surgical system of Embodiment 9, wherein the surgical instrument further comprises an instrument display configured to display a second operating parameter of the surgical instrument, and wherein the first operation The parameter is different from the second operating parameter.
实施例12—根据实施例9、10或11所述的外科系统,其中所述显示屏被进一步配置成能够显示所述发生器的操作参数。Embodiment 12—The surgical system of
实施例13—一种外科系统,所述外科系统包括外科集线器、外科器械、被配置成能够为端部执行器供能的发生器和被配置成能够从外科手术部位移除烟雾的排烟系统。所述外科器械包括所述端部执行器。控制命令直接从所述外科集线器传递到所述外科器械。所述外科器械被配置成能够将从所述外科集线器接收的所述控制命令传递到所述发生器和所述排烟系统。Example 13—A surgical system comprising a surgical hub, a surgical instrument, a generator configured to power an end effector, and a fume extraction system configured to remove fume from a surgical site . The surgical instrument includes the end effector. Control commands are communicated directly from the surgical hub to the surgical instruments. The surgical instrument is configured to communicate the control commands received from the surgical hub to the generator and the smoke extraction system.
实施例14—根据实施例13所述的外科系统,其中所述外科器械被配置成能够以菊花链方式将从所述外科集线器接收的所述控制命令传递到所述发生器和所述排烟系统。
实施例15—一种外科系统,所述外科系统包括外科集线器、第一外科器械、被配置成能够为第一端部执行器供能的第一发生器和第二外科器械。所述第一外科器械包括所述第一端部执行器。控制命令直接从所述外科集线器传递到所述第一外科器械。所述第一外科器械被配置成能够以菊花链方式将从所述外科集线器接收的所述控制命令传递到所述第一发生器和所述第二外科器械。
实施例16—根据实施例15所述的外科系统,其中所述第一外科器械被配置成能够利用由所述第一外科器械检测到的第一参数来修改所述控制命令。Embodiment 16—The surgical system of
实施例17—根据实施例16所述的外科系统,其中所述第一外科器械被配置成能够将所述经修改的控制命令传递到所述第二外科器械。Embodiment 17—The surgical system of Embodiment 16, wherein the first surgical instrument is configured to communicate the modified control command to the second surgical instrument.
实施例18—根据实施例17所述的外科系统,其中所述第二外科器械被配置成能够利用由所述第二外科器械检测到的第二参数来更改所述经修改的控制命令,并且其中所述第二外科器械被配置成能够将所述经更改的控制命令传递到所述第一外科器械。Embodiment 18—The surgical system of Embodiment 17, wherein the second surgical instrument is configured to alter the modified control command using a second parameter detected by the second surgical instrument, and wherein the second surgical instrument is configured to communicate the modified control command to the first surgical instrument.
实施例19—根据实施例15所述的外科系统,其中所述第一外科器械被配置成能够检测第一参数,其中所述第二外科器械被配置成能够检测第二参数,其中所述第二外科器械被配置成能够向所述第一外科器械传送所述检测到的第二参数,并且其中所述第一外科器械被配置成能够利用由所述第一外科器械检测到的所述第一参数和由所述第二外科器械检测到的所述第二参数来修改所述控制命令。Embodiment 19—The surgical system of
实施例20—根据实施例15、16、17、18或19所述的外科系统,其中所述第二外科器械包括排烟系统,所述排烟系统被配置成能够从外科手术部位移除烟雾。
尽管已举例说明和描述了多个形式,但是申请人的意图并非将所附权利要求的范围约束或限制在此类细节中。在不脱离本公开的范围的情况下,可实现对这些形式的许多修改、变型、改变、替换、组合和等同物,并且本领域技术人员将想到这些形式的许多修改、变型、改变、替换、组合和等同物。此外,另选地,可将与所描述的形式相关联的每个元件的结构描述为用于提供由所述元件执行的功能的器件。另外,在公开了用于某些部件的材料的情况下,也可使用其他材料。因此,应当理解,上述具体实施方式和所附权利要求旨在涵盖属于本发明所公开的形式范围内的所有此类修改、组合和变型。所附权利要求旨在涵盖所有此类修改、变型、改变、替换、修改和等同物。While various forms have been illustrated and described, it is not the intention of the applicants to restrict or limit the scope of the appended claims to such details. Numerous modifications, variations, changes, substitutions, combinations and equivalents of these forms may be made without departing from the scope of the present disclosure, and many modifications, variations, changes, substitutions, Combinations and Equivalents. Also, alternatively, the structure of each element associated with the described form may be described as a means for providing the function performed by the element. Additionally, where materials are disclosed for certain components, other materials may also be used. Therefore, it is to be understood that the foregoing detailed description and the appended claims are intended to cover all such modifications, combinations and variations as fall within the scope of the present disclosure. The appended claims are intended to cover all such modifications, variations, changes, substitutions, alterations and equivalents.
上述具体实施方式已经由使用框图、流程图和/或示例阐述了装置和/或方法的各种形式。只要此类框图、流程图和/或示例包含一个或多个功能和/或操作,本领域的技术人员就要将其理解为此类框图、流程图和/或示例中的每个功能和/或操作都可以单独和/或共同地通过多种硬件、软件、固件或实际上它们的任何组合来实施。本领域的技术人员将会认识到,本文公开的形式中的一些方面可作为在一台或多台计算机上运行的一个或多个计算机程序(例如,作为在一个或多个计算机系统上运行的一个或多个程序),作为在一个或多个处理器上运行的一个或多个程序(例如,作为在一个或多个微处理器上运行的一个或多个程序),作为固件,或作为实际上它们的任何组合全部或部分地在集成电路中等效地实现,并且根据本公开,设计电路系统和/或编写软件和/或硬件的代码将在本领域技术人员的技术范围内。另外,本领域的技术人员将会认识到,本文所述主题的机制能够作为多种形式的一个或多个程序产品进行分布,并且本文所述主题的例示性形式适用,而不管用于实际进行分布的信号承载介质的具体类型是什么。The foregoing detailed description has illustrated various forms of apparatus and/or methods using block diagrams, flowcharts, and/or examples. So long as such block diagrams, flowcharts and/or examples include one or more functions and/or operations, those skilled in the art will understand each function and/or operation in such block diagrams, flowcharts and/or examples or operations may be implemented individually and/or collectively by a variety of hardware, software, firmware, or virtually any combination thereof. Those skilled in the art will recognize that some aspects of the forms disclosed herein can be implemented as one or more computer programs running on one or more computers (eg, as a program running on one or more computer systems) one or more programs), as one or more programs running on one or more processors (e.g., as one or more programs running on one or more microprocessors), as firmware, or as Indeed any combination of them is equivalently implemented in whole or in part in an integrated circuit, and it would be within the skill of those skilled in the art to design circuitry and/or code software and/or hardware in light of this disclosure. In addition, those skilled in the art will recognize that the mechanisms of the subject matter described herein can be distributed as one or more program products in a variety of forms, and that the illustrative forms of the subject matter described herein are applicable regardless of use in actual implementation. What is the specific type of signal bearing medium distributed.
用于编程逻辑以执行各种所公开的方面的指令可存储在系统中的存储器内,诸如动态随机存取存储器(DRAM)、高速缓存、闪存存储器或其他存储器。此外,指令可经由网络或通过其他计算机可读介质来分发。因此,机器可读介质可包括用于存储或传输以机器(例如,计算机)可读形式的信息的任何机构,但不限于软盘、光学盘、光盘只读存储器(CD-ROM)、和磁光盘、只读存储器(ROM)、随机存取存储器(RAM)、可擦除可编程只读存储器(EPROM)、电可擦除可编程只读存储器(EEPROM)、磁卡或光卡、闪存存储器、或经由电信号、光学信号、声学信号或其他形式的传播信号(例如,载波、红外信号、数字信号等)在因特网上传输信息时使用的有形的、机器可读存储装置。因此,非暂态计算机可读介质包括适于以机器(例如,计算机)可读的形式存储或传输电子指令或信息的任何类型的有形机器可读介质。Instructions for programming logic to perform the various disclosed aspects may be stored in memory in the system, such as dynamic random access memory (DRAM), cache, flash memory, or other memory. Furthermore, the instructions may be distributed over a network or through other computer-readable media. Thus, a machine-readable medium may include any mechanism for storing or transmitting information in a form readable by a machine (eg, a computer), but is not limited to floppy disks, optical disks, compact disk read only memory (CD-ROM), and magneto-optical disks , read only memory (ROM), random access memory (RAM), erasable programmable read only memory (EPROM), electrically erasable programmable read only memory (EEPROM), magnetic or optical cards, flash memory, or A tangible, machine-readable storage device used in transmitting information over the Internet via electrical, optical, acoustic, or other forms of propagated signals (eg, carrier waves, infrared signals, digital signals, etc.). Accordingly, non-transitory computer-readable media includes any type of tangible machine-readable media suitable for storing or transmitting electronic instructions or information in a form readable by a machine (eg, a computer).
如本文任一方面所用,术语“控制电路”可指例如硬连线电路系统、可编程电路系统(例如,计算机处理器,该计算机处理器包括一个或多个单独指令处理内核、处理单元,处理器、微控制器、微控制器单元、控制器、数字信号处理器(DSP)、可编程逻辑装置(PLD)、可编程逻辑阵列(PLA)、场可编程门阵列(FPGA))、状态机电路系统、存储由可编程电路系统执行的指令的固件、以及它们的任何组合。控制电路可以集体地或单独地实现为形成更大系统的一部分的电路系统,例如集成电路(IC)、专用集成电路(ASIC)、片上系统(SoC)、台式计算机、膝上型计算机、平板计算机、服务器、智能电话等。因此,如本文所用,“控制电路”包括但不限于具有至少一个离散电路的电子电路、具有至少一个集成电路的电子电路、具有至少一个专用集成电路的电子电路、形成由计算机程序配置的通用计算设备的电子电路(如,至少部分地实施本文所述的方法和/或设备的由计算机程序配置的通用计算机,或至少部分地实施本文所述的方法和/或设备的由计算机程序配置的微处理器)、形成存储器设备(如,形成随机存取存储器)的电子电路,和/或形成通信设备(如,调节解调器、通信开关或光电设备)的电子电路。本领域的技术人员将会认识到,可以模拟或数字方式或它们的一些组合实施本文所述的主题。As used in any aspect herein, the term "control circuitry" may refer to, for example, hardwired circuitry, programmable circuitry (eg, a computer processor that includes one or more individual instruction processing cores, processing units, processing devices, microcontrollers, microcontroller units, controllers, digital signal processors (DSPs), programmable logic devices (PLDs), programmable logic arrays (PLAs), field programmable gate arrays (FPGAs), state machines Circuitry, firmware that stores instructions for execution by programmable circuitry, and any combination thereof. The control circuits may be implemented collectively or individually as circuitry forming part of a larger system, such as an integrated circuit (IC), an application specific integrated circuit (ASIC), a system on a chip (SoC), a desktop computer, a laptop computer, a tablet computer , servers, smartphones, etc. Thus, as used herein, "control circuit" includes, but is not limited to, an electronic circuit having at least one discrete circuit, an electronic circuit having at least one integrated circuit, an electronic circuit having at least one application specific integrated circuit, forming a general-purpose computer configured by a computer program Electronic circuitry of an apparatus (eg, a general-purpose computer configured by a computer program at least partially implementing the methods and/or apparatus described herein, or a microcomputer configured by a computer program at least partially implementing the methods and/or apparatus described herein) processors), electronic circuits that form memory devices (eg, random access memory), and/or electronic circuits that form communication devices (eg, modems, communication switches, or optoelectronic devices). Those skilled in the art will recognize that the subject matter described herein may be implemented in analog or digital fashion, or some combination thereof.
如本文的任何方面所用,术语“逻辑”可指被配置成能够执行前述操作中的任一者的应用程序、软件、固件和/或电路系统。软件可体现为记录在非暂态计算机可读存储介质上的软件包、代码、指令、指令集和/或数据。固件可体现为在存储器装置中硬编码(例如,非易失性)的代码、指令或指令集和/或数据。As used in any aspect herein, the term "logic" may refer to applications, software, firmware and/or circuitry configured to perform any of the foregoing operations. Software may be embodied as a software package, code, instructions, sets of instructions, and/or data recorded on a non-transitory computer-readable storage medium. Firmware may be embodied as code, instructions or a set of instructions and/or data hard-coded (eg, non-volatile) in a memory device.
如本文任一方面所用,术语“部件”、“系统”、“模块”等可指计算机相关实体、硬件、硬件和软件的组合、软件或执行中的软件。As used in any aspect herein, the terms "component," "system," "module," etc. may refer to a computer-related entity, hardware, a combination of hardware and software, software, or software in execution.
如本文任一方面中所用,“算法”是指导致所期望结果的有条理的步骤序列,其中“步骤”是指物理量和/或逻辑状态的操纵,物理量和/或逻辑状态可(但不一定)采用能被存储、转移、组合、比较和以其他方式操纵的电或磁信号的形式。常用于指这些信号,如位、值、元素、符号、字符、术语、数字等。这些和类似的术语可与适当的物理量相关联并且仅仅是应用于这些量和/或状态的方便的标签。As used in any aspect herein, an "algorithm" refers to an organized sequence of steps leading to a desired result, wherein "step" refers to the manipulation of physical quantities and/or logical states that may (but need not necessarily be) ) take the form of electrical or magnetic signals capable of being stored, transferred, combined, compared and otherwise manipulated. Often used to refer to these signals as bits, values, elements, symbols, characters, terms, numbers, etc. These and similar terms may be associated with the appropriate physical quantities and are merely convenient labels applied to these quantities and/or states.
网络可包括分组交换网络。通信装置可能够使用所选择的分组交换网络通信协议来彼此通信。一个示例性通信协议可包括可能够允许使用传输控制协议/因特网协议(TCP/IP)进行通信的以太网通信协议。以太网协议可符合或兼容电气和电子工程师学会(IEEE)于2008年12月发布的标题为“IEEE 802.3Standard”的以太网标准和/或本标准的更高版本。另选地或附加地,通信装置可能够使用X.25通信协议彼此通信。X.25通信协议可符合或兼容由国际电信联盟电信标准化部门(ITU-T)发布的标准。另选地或附加地,通信装置可能够使用帧中继通信协议彼此通信。帧中继通信协议可符合或兼容由国际电报电话咨询委员会(CCITT)和/或美国国家标准学会(ANSI)发布的标准。另选地或附加地,收发器可能够使用异步传输模式(ATM)通信协议彼此通信。ATM通信协议可符合或兼容ATM论坛于2001年8月发布的名为“ATM-MPLS Network Interworking 2.0”的ATM标准和/或该标准的更高版本。当然,本文同样设想了不同的和/或之后开发的连接取向的网络通信协议。The network may include a packet-switched network. The communication devices may be capable of communicating with each other using the selected packet-switched network communication protocol. An exemplary communication protocol may include an Ethernet communication protocol that may enable communication using Transmission Control Protocol/Internet Protocol (TCP/IP). The Ethernet protocol may conform to or be compatible with the Ethernet standard titled "IEEE 802.3 Standard" published by the Institute of Electrical and Electronics Engineers (IEEE) in December 2008 and/or later versions of this standard. Alternatively or additionally, the communication devices may be able to communicate with each other using the X.25 communication protocol. The X.25 communication protocol may conform to or be compatible with standards published by the International Telecommunication Union Telecommunication Standardization Sector (ITU-T). Alternatively or additionally, the communication devices may be able to communicate with each other using a frame relay communication protocol. The Frame Relay communication protocol may conform to or be compatible with standards published by the Consultative Committee for International Telegraph and Telephone (CCITT) and/or the American National Standards Institute (ANSI). Alternatively or additionally, the transceivers may be capable of communicating with each other using an asynchronous transfer mode (ATM) communication protocol. The ATM communication protocol may conform to or be compatible with the ATM standard named "ATM-MPLS Network Interworking 2.0" published by the ATM Forum in August 2001 and/or a later version of the standard. Of course, different and/or later developed connection-oriented network communication protocols are also contemplated herein.
除非上述公开中另外明确指明,否则可以理解的是,在上述公开中,使用术语如“处理”、“估算”、“计算”、“确定”、“显示”的讨论是指计算机系统或类似的电子计算装置的动作和进程,其操纵表示为计算机系统的寄存器和存储器内的物理(电子)量的数据并将其转换成相似地表示为计算机系统存储器或寄存器或其他此类信息存储、传输或显示装置内的物理量的其他数据。Unless explicitly stated otherwise in the above disclosure, it is understood that in the above disclosure, discussions using terms such as "processing," "estimating," "calculating," "determining," "displaying," refer to computer systems or similar The acts and processes of electronic computing devices that manipulate data represented as physical (electronic) quantities within the registers and memory of a computer system and convert it into data similarly represented as computer system memory or registers or other such information storage, transmission or Displays other data of physical quantities within the device.
一个或多个部件在本文中可被称为“被配置成能够”、“可配置成能够”、“可操作/可操作地”、“适于/可适于”、“能够”、“可适形/适形于”等。本领域的技术人员将会认识到,除非上下文另有所指,否则“被配置成能够”通常可涵盖活动状态的部件和/或未活动状态的部件和/或待机状态的部件。One or more components may be referred to herein as "configured to be able", "configurable to be able", "operable/operable", "adapted/adaptable", "capable", "possible" Conform/Conform to" etc. Those skilled in the art will recognize that unless the context dictates otherwise, "configured to be able" may generally encompass active state components and/or inactive state components and/or standby state components.
术语“近侧”和“远侧”在本文中是相对于操纵外科器械的柄部部分的临床医生来使用的。术语“近侧”是指最靠近临床医生的部分,术语“远侧”是指远离临床医生定位的部分。还应当理解,为简洁和清楚起见,本文可结合附图使用诸如“竖直”、“水平”、“上”和“下”等空间术语。然而,外科器械在许多取向和方位中使用,并且这些术语并非是限制性的和/或绝对的。The terms "proximal" and "distal" are used herein with respect to a clinician manipulating the handle portion of a surgical instrument. The term "proximal" refers to the portion closest to the clinician, and the term "distal" refers to the portion located away from the clinician. It should also be understood that, for brevity and clarity, spatial terms such as "vertical," "horizontal," "upper," and "lower" may be used herein in connection with the drawings. However, surgical instruments are used in many orientations and orientations, and these terms are not intended to be limiting and/or absolute.
本领域的技术人员将认识到,一般而言,本文、以及特别是所附权利要求(例如,所附权利要求的正文)中所使用的术语通常旨在为“开放”术语(例如,术语“包括”应解释为“包括但不限于”,术语“具有”应解释为“至少具有”,术语“包含”应解释为“包含但不限于”等)。本领域的技术人员还应当理解,如果所引入权利要求表述的具体数目为预期的,则此类意图将在权利要求中明确表述,并且在不存在此类叙述的情况下,不存在此类意图。例如,为有助于理解,下述所附权利要求可含有对介绍性短语“至少一个”和“一个或多个”的使用以引入权利要求。然而,对此类短语的使用不应视为暗示通过不定冠词“一个”或“一种”引入权利要求表述将含有此类引入权利要求表述的任何特定权利要求限制在含有仅一个这样的表述的权利要求中,甚至当同一权利要求包括介绍性短语“一个或多个”或“至少一个”和诸如“一个”或“一种”(例如,“一个”和/或“一种”通常应解释为意指“至少一个”或“一个或多个”)的不定冠词时;这也适用于对用于引入权利要求表述的定冠词的使用。Those of skill in the art will recognize that the terms used herein, in general, and in the appended claims in particular (eg, the body of the appended claims) are generally intended to be "open" terms (eg, the term "" Including" should be interpreted as "including but not limited to", the term "having" should be interpreted as "having at least", the term "including" should be interpreted as "including but not limited to", etc.). It will also be understood by those within the art that if a specific number of an introduced claim recitation is intended, such an intent will be explicitly recited in the claim, and in the absence of such recitation no such intent is present . For example, as an aid to understanding, the following appended claims may contain usage of the introductory phrases "at least one" and "one or more" to introduce claims. However, use of such phrases should not be taken to imply that introduction of a claim expression by the indefinite articles "a" or "an" limits any particular claim containing such introduced claim expression to containing only one such expression even when the same claim includes the introductory phrases "one or more" or "at least one" and phrases such as "a" or "an" (eg, "an" and/or "an" should generally be When interpreted as an indefinite article meaning "at least one" or "one or more"); this also applies to the use of the definite article for introducing claim expressions.
另外,即使明确叙述引入权利要求叙述的特定数目,本领域的技术人员应当认识到,此种叙述通常应解释为意指至少所叙述的数目(例如,在没有其他修饰语的情况下,对“两个叙述”的裸叙述通常意指至少两个叙述、或两个或更多个叙述)。此外,在其中使用类似于“A、B和C中的至少一者等”的惯例的那些情况下,一般而言,此类构造意在具有本领域的技术人员将理解所述惯例的意义(例如,“具有A、B和C中的至少一者的系统”将包括但不限于具有仅A、仅B、仅C、A和B一起、A和C一起、B和C一起和/或A、B和C一起等的系统)。在其中使用类似于“A、B或C中的至少一者等”的惯例的那些情况下,一般而言,此类构造意在具有本领域的技术人员将理解所述惯例的意义(例如,“具有A、B或C中的至少一者的系统”应当包括但不限于具有仅A、仅B、仅C、A和B一起、A和C一起、B和C一起和/或A、B和C一起等的系统)。本领域的技术人员还应当理解,通常,除非上下文另有指示,否则无论在具体实施方式、权利要求或附图中呈现两个或更多个替代术语的转折性词语和/或短语应理解为涵盖包括所述术语中的一者、所述术语中的任一个或这两个术语的可能性。例如,短语“A或B”通常将被理解为包括“A”或“B”或“A和B”的可能性。Additionally, even if a specific number of an introduced claim recitation is explicitly recited, one skilled in the art will recognize that such recitation should generally be construed to mean at least the recited number (eg, in the absence of other modifiers, a reference to "" The "naked narration of two narrations" generally means at least two narrations, or two or more narrations). Furthermore, in those cases where a convention similar to "at least one of A, B, and C, etc." is used, such constructions are, in general, intended to have the meaning that those skilled in the art would understand the convention ( For example, "a system having at least one of A, B, and C" would include, but not be limited to, having A only, B only, C only, A and B together, A and C together, B and C together, and/or A , B and C together etc.). In those cases where a convention similar to "at least one of A, B, or C, etc." is used, such constructions are generally intended to have the meaning that those skilled in the art would understand the convention (eg, "A system having at least one of A, B, or C" shall include, but is not limited to, having A only, B only, C only, A and B together, A and C together, B and C together, and/or A, B systems such as with C). It will also be understood by those skilled in the art that, generally, unless the context dictates otherwise, the presentation of two or more alternative terms in the detailed description, claims, or drawings, inflectional words and/or phrases should be construed as The possibility of including one of the terms, either of the terms, or both of the terms is encompassed. For example, the phrase "A or B" will generally be understood to include the possibilities of "A" or "B" or "A and B".
对于所附的权利要求,本领域的技术人员将会理解,其中表述的操作通常可以任何顺序进行。另外,尽管以一个或多个序列出了各种操作流程图,但应当理解,可以不同于所示顺序的其他顺序执行各种操作,或者可同时执行所述各种操作。除非上下文另有规定,否则此类替代排序的示例可包括重叠、交错、中断、重新排序、增量、预备、补充、同时、反向,或其他改变的排序。此外,除非上下文另有规定,否则像“响应于”、“相关”这样的术语或其他过去式的形容词通常不旨在排除此类变体。With regard to the appended claims, those skilled in the art will understand that the operations recited therein can generally be performed in any order. Additionally, although various operational flowcharts are presented in one or more sequences, it should be understood that the various operations may be performed in other orders than shown, or may be performed concurrently. Unless the context dictates otherwise, examples of such alternative orderings may include overlapping, interleaved, interrupted, reordered, incremental, preparatory, supplemental, simultaneous, reversed, or other altered orderings. Furthermore, terms like "responsive to," "related to," or other past-tense adjectives are generally not intended to exclude such variations unless the context dictates otherwise.
值得一提的是,任何对“一个方面”、“一方面”、“一范例”、“一个范例”的提及均意指结合所述方面所述的具体特征部、结构或特征包括在至少一个方面中。因此,在整个说明书的各种位置出现的短语“在一个方面”、“在一方面”、“在一范例中”、“在一个范例中”不一定都指同一方面。此外,具体特征部、结构或特征可在一个或多个方面中以任何合适的方式组合。It is worth mentioning that any reference to "an aspect", "an aspect", "an example", "an example" means that the particular feature, structure or characteristic described in connection with the said aspect is included in at least one aspect. in one aspect. Thus, the appearances of the phrases "in one aspect," "in an aspect," "in an example," "in an example" in various places throughout the specification are not necessarily all referring to the same aspect. Furthermore, the particular features, structures or characteristics may be combined in any suitable manner in one or more aspects.
在本说明书中,除非另有说明,否则如本公开中所使用的术语“约”或“大约”是指如本领域普通技术人员所确定的特定值的可接受误差,这部分地取决于如何测量或确定值。在某些实施方案中,术语“约”或“大约”是指在1、2、3或4标准偏差内。在某些实施方案中,术语“约”或“大约”是指在给定值或范围的50%、20%、15%、10%、9%、8%、7%、6%、5%、4%、3%、2%、1%、0.5%或0.05%内。In this specification, unless otherwise stated, the terms "about" or "approximately" as used in this disclosure refer to an acceptable error for a particular value as determined by one of ordinary skill in the art, depending in part on how Measure or determine a value. In certain embodiments, the term "about" or "approximately" means within 1, 2, 3, or 4 standard deviations. In certain embodiments, the term "about" or "approximately" means at 50%, 20%, 15%, 10%, 9%, 8%, 7%, 6%, 5% of a given value or range , 4%, 3%, 2%, 1%, 0.5% or 0.05%.
在本说明书中,除非另外指明,否则所有的数值参数在所有情况下均应理解为以术语“约”作引语或者受术语“约”修饰,其中数值参数具有用于确定参数数值的基础测量技术的固有差异性特征。在最低程度上且不试图将等同原则的应用限制到权利要求的保护范围的前提下,至少应当根据所报告的数值的有效数位并通过应用惯常的四舍五入法来解释本文描述的每一个数值参数。In this specification, unless otherwise indicated, all numerical parameters should in all instances be understood to be referenced by or modified by the term "about", where the numerical parameter has the underlying measurement used to determine the value of the parameter The inherently differentiating characteristics of technology. To the minimum extent and without attempting to limit the application of the doctrine of equivalents to the scope of the claims, each numerical parameter described herein should at least be construed in light of the reported number of significant digits and by applying customary rounding.
本文列出的任何数值范围包括涵盖在所列范围内的所有子范围。例如,范围“1至10”包括列出的最小值1与列出的最大值10之间(包括1和10)的所有子范围,也就是说,具有等于或大于1的最小值和等于或小于10的最大值。此外,本文所列的所有范围包括所列范围的端点。例如,“1至10”的范围包括端点1和10。本说明书中列出的任何上限值旨在包括涵盖在其中的所有较小限值,并且本说明书中列出的任何下限值旨在包括涵盖在其中的所有较大限值。因此,申请人保留修正本说明书(包括权利要求)的权利,以明确地列出涵盖在明确列出的范围内的任何子范围。所有此类范围在本说明书中被固有地描述。Any numerical range recited herein includes all subranges subsumed within the recited range. For example, the range "1 to 10" includes all subranges between the listed minimum value of 1 and the listed maximum value of 10, inclusive, that is, having a minimum value equal to or greater than 1 and a minimum value equal to or greater than 1 less than the maximum value of 10. Furthermore, all ranges recited herein are inclusive of the endpoints of the recited range. For example, the range "1 to 10" includes the
本说明书提及和/或在任何申请数据表中列出的任何专利申请,专利,非专利公布或其他公开材料均以引用方式并入本文,只要所并入的材料在此不一致。因此,并且在必要的程度下,本文明确列出的公开内容代替以引用方式并入本文的任何冲突材料。据称以引用方式并入本文但与本文列出的现有定义、陈述或其他公开材料相冲突的任何材料或其部分,将仅在所并入的材料与现有的公开材料之间不产生冲突的程度下并入。Any patent applications, patents, non-patent publications or other publications mentioned in this specification and/or listed in any Application Data Sheet are incorporated herein by reference to the extent that the incorporated material is not inconsistent herein. Accordingly, and to the extent necessary, the disclosure expressly set forth herein supersedes any conflicting material incorporated herein by reference. Any material, or portion thereof, purportedly incorporated herein by reference, but which conflicts with existing definitions, statements, or other disclosed material set forth herein, will not arise only between the incorporated material and the existing disclosed material merged to the extent of conflict.
概括地说,已经描述了由采用本文所述的概念产生的许多有益效果。为了举例说明和描述的目的,已经提供了一个或多个形式的上述具体实施方式。这些具体实施方式并非意图为详尽的或限定到本发明所公开的精确形式。可以按照上述教导内容对本发明进行修改或变型。选择和描述的一个或多个形式是为了说明原理和实际应用,从而使本领域的普通技术人员能够利用适用于预期的特定用途的各种形式和各种修改。与此一同提交的权利要求书旨在限定完整范围。In general terms, a number of benefits have been described that result from employing the concepts described herein. The foregoing detailed description has been presented in one or more forms for the purposes of illustration and description. These detailed descriptions are not intended to be exhaustive or to be limited to the precise forms disclosed. Modifications and variations of the present invention are possible in light of the above teachings. The form or forms was chosen and described in order to illustrate principles and practical application, to thereby enable one of ordinary skill in the art to utilize various forms and modifications as are suited to the particular use contemplated. The claims filed herewith are intended to define the full scope.
Claims (20)
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962955299P | 2019-12-30 | 2019-12-30 | |
| US62/955,299 | 2019-12-30 | ||
| US16/885,917US11759251B2 (en) | 2019-12-30 | 2020-05-28 | Control program adaptation based on device status and user input |
| US16/885,917 | 2020-05-28 | ||
| PCT/IB2020/060786WO2021137029A1 (en) | 2019-12-30 | 2020-11-16 | Control program adaptation based on device status and user input |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114929137Atrue CN114929137A (en) | 2022-08-19 |
Family
ID=82804113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202080091258.0APendingCN114929137A (en) | 2019-12-30 | 2020-11-16 | Control program adjustment based on device status and user input |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7669621B2 (en) |
| CN (1) | CN114929137A (en) |
| BR (1) | BR112022012565A2 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120116391A1 (en)* | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with sensor and powered control |
| US20160279280A1 (en)* | 2013-11-21 | 2016-09-29 | The University Of Toledo | Macroporous Granules of Alkaline Earth Phosphates Using Cement Technology and Gas Evolving Porogen |
| US20170105782A1 (en)* | 2015-10-16 | 2017-04-20 | Ethicon Endo-Surgery, Llc | Control and electrical connections for electrode endocutter device |
| US20170238991A1 (en)* | 2016-02-22 | 2017-08-24 | Ethicon Endo-Surgery, Llc | Flexible circuits for electrosurgical instrument |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9492221B2 (en)* | 2011-10-20 | 2016-11-15 | Covidien Lp | Dissection scissors on surgical device |
| BR112015021082B1 (en)* | 2013-03-01 | 2022-05-10 | Ethicon Endo-Surgery, Inc | surgical instrument |
| US9901386B2 (en)* | 2014-01-13 | 2018-02-27 | Covidien Lp | Systems and methods for multifrequency cable compensation |
- 2020
- 2020-11-16CNCN202080091258.0Apatent/CN114929137A/enactivePending
- 2020-11-16BRBR112022012565Apatent/BR112022012565A2/enunknown
- 2020-11-16JPJP2022540404Apatent/JP7669621B2/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120116391A1 (en)* | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with sensor and powered control |
| US20160279280A1 (en)* | 2013-11-21 | 2016-09-29 | The University Of Toledo | Macroporous Granules of Alkaline Earth Phosphates Using Cement Technology and Gas Evolving Porogen |
| US20170105782A1 (en)* | 2015-10-16 | 2017-04-20 | Ethicon Endo-Surgery, Llc | Control and electrical connections for electrode endocutter device |
| US20170238991A1 (en)* | 2016-02-22 | 2017-08-24 | Ethicon Endo-Surgery, Llc | Flexible circuits for electrosurgical instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7669621B2 (en) | 2025-04-30 |
| BR112022012565A2 (en) | 2022-09-06 |
| JP2023508530A (en) | 2023-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11786294B2 (en) | Control program for modular combination energy device | |
| US11937866B2 (en) | Method for an electrosurgical procedure | |
| JP7480044B2 (en) | State estimation of ultrasonic end effector and its control system | |
| JP7305651B2 (en) | Situational awareness of electrosurgical systems | |
| JP6279221B2 (en) | Method and apparatus for programming a modular surgical instrument | |
| US9283045B2 (en) | Surgical instruments with fluid management system | |
| WO2019173146A1 (en) | Smart blade and power pulsing | |
| CN111818865A (en) | Calcified vessel identification | |
| CN110859658A (en) | Temperature control of ultrasonic end effector and control system therefor | |
| JP7391852B2 (en) | Detecting the appearance of end effectors in liquids | |
| CN111526821A (en) | Determining a state of an ultrasonic end effector | |
| CN112055568A (en) | Bipolar combined device for automatic pressure regulation based on energy mode | |
| CN111565658A (en) | Determining the state of an ultrasound electromechanical system from a frequency shift | |
| CN111526817A (en) | Controlling activation of an ultrasonic surgical instrument based on the presence of tissue | |
| CN114901186A (en) | Electrosurgical instrument with electrode bias support | |
| CN114929137A (en) | Control program adjustment based on device status and user input | |
| CN114901166A (en) | Control program for modular combined energy devices | |
| CN114845651A (en) | Surgical system communication path | |
| CN111526819A (en) | Determining tissue composition via an ultrasound system | |
| CN111601562A (en) | Controlling an ultrasonic surgical instrument based on tissue location | |
| CN115003239A (en) | Electrosurgical instrument with asynchronously energized electrodes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |