CN114879678A - Distance weight-based global path smoothing method for mobile robot - Google Patents
Distance weight-based global path smoothing method for mobile robotDownload PDFInfo
- Publication number
- CN114879678A CN114879678ACN202210548004.8ACN202210548004ACN114879678ACN 114879678 ACN114879678 ACN 114879678ACN 202210548004 ACN202210548004 ACN 202210548004ACN 114879678 ACN114879678 ACN 114879678A
- Authority
- CN
- China
- Prior art keywords
- path
- point
- smoothed
- global
- global path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0221—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving a learning process
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及移动机器人领域,尤其涉及一种基于距离权重的移动机器人全局路径平滑方法,是移动机器人自主导航所用的全局路径的平滑处理。The invention relates to the field of mobile robots, in particular to a method for smoothing the global path of a mobile robot based on distance weights, which is the smoothing of the global path used for autonomous navigation of the mobile robot.
背景技术Background technique
近年来,全球各国相继推出各项政策发展制造业,自主移动机器人技术引起各国学术界和制造业越来越多的关注。最初移动机器人的应用仅限于制造业,但如今它普遍应用于军事、工业、服务业、医疗、航天、农业等领域,能够为现代社会贡献重要福利。In recent years, countries around the world have successively launched various policies to develop the manufacturing industry, and autonomous mobile robot technology has attracted more and more attention from academia and manufacturing in various countries. Initially, the application of mobile robots was limited to manufacturing, but now it is widely used in military, industrial, service, medical, aerospace, agriculture and other fields, and can contribute important benefits to modern society.
路径规划技术是移动机器人的重要技术组成部分。路径规划根据规划的目标范围不同分为全局路径规划和局部路径规划,全局路径规划的任务是根据静态地图信息、起始点和目标点离线规划出一条从起始点到目标点的无碰撞全局路径,局部路径规划的任务是根据实时的传感器信息进行避障和跟踪全局路径。由全局路径规划方法在静态栅格地图上直接规划的全局路径仅能保证栅格数最少,实际路径并非最短并且该全局路径通常包含一些不必要的急转弯且轨迹曲率变化大,移动机器人若沿着此路径行驶必须要频繁加减速,既增加了移动的时间成本,频繁的加减速对电机的寿命也是一种额外的损耗。Path planning technology is an important technical component of mobile robots. Path planning is divided into global path planning and local path planning according to the different planned target ranges. The task of global path planning is to plan a collision-free global path from the starting point to the target point offline based on static map information, starting point and target point. The task of local path planning is to avoid obstacles and track the global path based on real-time sensor information. The global path directly planned by the global path planning method on the static grid map can only guarantee the minimum number of grids, the actual path is not the shortest, and the global path usually contains some unnecessary sharp turns and the trajectory curvature changes greatly. Driving along this path requires frequent acceleration and deceleration, which not only increases the time cost of moving, but also causes an additional loss to the life of the motor.
解决移动机器人全局路径存在的问题一个主要方法就是对全局路径进行平滑优化,其已经成为自主移动移动机器人全局路径规划一项必需且重要的技术。One of the main methods to solve the problems existing in the global path of mobile robots is to optimize the global path smoothly, which has become a necessary and important technology for global path planning of autonomous mobile robots.
移动机器人常用的全局路径平滑方法有基于贝塞尔曲线或B样条的路径平滑方法,但是该方法平滑后的全局路径点是不可控,部分平滑后的全局路径点会与原始的全局路径点偏差过大,甚至会出现平滑后的全局路径点落在障碍物上的情况,全局路径的平滑度虽有所改善,但是会影响到移动机器人实际运行效率;基于梯度下降的平滑方法也常用于移动机器人全局路径的平滑,但是该方法计算量较大,难于使用。The commonly used global path smoothing methods for mobile robots are the path smoothing methods based on Bezier curves or B-splines, but the global path points after smoothing by this method are uncontrollable, and the partially smoothed global path points will be different from the original global path points. If the deviation is too large, the smoothed global path point may even fall on the obstacle. Although the smoothness of the global path has been improved, it will affect the actual operation efficiency of the mobile robot; the smoothing method based on gradient descent is also commonly used in The smoothing of the global path of the mobile robot, but this method is difficult to use due to the large amount of calculation.
而本发明提出的基于距离权重的移动机器人全局路径平滑算法能够保证平滑后的全局路径点是偏差可控的,确保平滑后的路径点不在障碍物上,且具有计算量小和易于使用的优点,能有效改善全局路径的平滑性,提高机器人的移动状态和效率。The distance weight-based global path smoothing algorithm for mobile robots proposed in the present invention can ensure that the smoothed global path points are deviation-controllable, ensure that the smoothed path points are not on obstacles, and have the advantages of small computation and easy use. , which can effectively improve the smoothness of the global path and improve the movement state and efficiency of the robot.
发明内容SUMMARY OF THE INVENTION
为了克服上述现有技术的不足,本发明提供了一种基于距离权重的移动机器人全局路径平滑方法。其根据参考路径点与待平滑路径点的距离对当前待平滑的路径点进行位置调整,从而达到平滑移动机器人全局路径的目的。In order to overcome the above-mentioned shortcomings of the prior art, the present invention provides a global path smoothing method for a mobile robot based on distance weights. It adjusts the position of the current path point to be smoothed according to the distance between the reference path point and the path point to be smoothed, so as to achieve the purpose of smoothing the global path of the mobile robot.
为了实现上述技术目的,本发明的技术方案如下:一种基于距离权重的移动机器人全局路径平滑方法,包含以下步骤:In order to achieve the above technical purpose, the technical solution of the present invention is as follows: a method for smoothing the global path of a mobile robot based on distance weight, comprising the following steps:
(1)构建栅格地图并设定栅格地图精度,每个栅格的边长大小是m毫米;(1) Build a grid map and set the grid map precision, and the side length of each grid is m mm;
(2)设定移动机器人在栅格地图中移动的安全阈值,安全阈值定义为移动机器人的移动过程中的全局路径点与障碍物保持的距离ds米;(2) Set the safety threshold for the mobile robot to move in the grid map, and the safety threshold is defined as the distance ds m between the global path point and the obstacle during the movement of the mobile robot;
(3)指定移动机器人的全局路径规划起点和终点,根据安全阈值生成全局路径点,将生成的全局路径点定义为初始路径点;(3) Specify the starting point and end point of the global path planning of the mobile robot, generate a global path point according to the safety threshold, and define the generated global path point as the initial path point;
(4)全局路径点密化处理,在初始路径点位置保持不变的前提下相对均匀地增添新的路径点,将新增加的路径点和初始路径点统称为平滑前路径点;(4) Global path point densification processing, adding new path points relatively uniformly on the premise that the position of the initial path point remains unchanged, and the newly added path point and the initial path point are collectively referred to as the path point before smoothing;
(5)设定平滑权重,待平滑点的位置调整依据是路径参考点与待平滑点沿全局路径线段的长度,长度与权重成反比,待平滑点和路径参考点均为平滑前路径点,所述路径参考点为依据栅格地图精度和设定的安全阈值,根据全局路径点的顺序以当前待平滑点为中心分别向前和向后选取等量的平滑前路径点;(5) Set the smoothing weight. The position adjustment of the point to be smoothed is based on the length of the path reference point and the point to be smoothed along the global path segment. The length is inversely proportional to the weight. The point to be smoothed and the reference point of the path are both the path points before smoothing. The path reference point is based on the grid map precision and the set safety threshold, and selects the same amount of pre-smoothing path points forward and backward respectively according to the order of the global path points with the current point to be smoothed as the center;
(6)从起点开始,依次选择还未调整位置的平滑前路径点作为当前的待平滑点,若当前的待平滑点为终点则结束流程,否则以当前的待平滑点为中心选取若干路径参考点;(6) Starting from the starting point, select the path points before smoothing whose positions have not been adjusted in turn as the current point to be smoothed. If the current point to be smoothed is the end point, end the process, otherwise, select a number of path references with the current point to be smoothed as the center point;
(7)根据选取的路径参考点和设定的平滑权重调整待平滑点的位置,调整后的路径点位置即平滑路径的路径点位置,并返回步骤(6)。(7) Adjust the position of the point to be smoothed according to the selected path reference point and the set smoothing weight, the adjusted path point position is the path point position of the smooth path, and return to step (6).
进一步地,步骤(3)中,设定起点和终点,在构建的栅格地图上进行全局路径规划,要求规划全局路径时考虑栅格地图边长m和设定的安全阈值ds,要求全局路径搜索时以待搜索点为中心向外扩散至少a个栅格,a按照下式计算;Further, in step (3), the starting point and the ending point are set, and the global path planning is performed on the constructed grid map. It is required that the grid map side length m and the set safety threshold ds be considered when planning the global path, and the global path is required to be considered. When the path is searched, at least a grids are spread out from the point to be searched as the center, and a is calculated according to the following formula;

进一步地,步骤(4)中,采用增添中心点的方法对全局路径点进行密化处理,若(x1,y1)和(x2,y2)是相邻路径点,则插入新的中心路径点(xnew,ynew),xnew和ynew分别按照下式计算:Further, in step (4), the method of adding center points is used to densify the global path points. If (x1 , y1 ) and (x2 , y2 ) are adjacent path points, insert new The central path point (xnew , ynew ), xnew and ynew are respectively calculated as follows:


进一步地,步骤(5)中,某路径参考点与当前待平滑点的距离是d,则平滑时该路径参考点所占的权重为
进一步地,步骤(5)中,路径参考点的选取时,若初始设置时要求分别向前和向后各选取nraw个路径点;nraw具体根据实际应用场景需求取值,nraw越小平滑后的路径则与初始路径的偏差越小,nraw越大则平滑后的路径的平滑度越高。nraw最小等于1,最大等于a值,若nraw大于a值;当前待平滑点向前总共有npre个全局路径点,当前待平滑点向后总共有nback个全局路径点,则最终以当前待平滑点为中心分别向前和向后选择n个全局路径点,n按照下式计算。Further, in step (5), when the path reference point is selected, if it is required to select nraw path points forward andbackward respectively during the initial setting; The smaller the deviation of the smoothed path from the initial path, the larger the nraw , the higher the smoothness of the smoothed path. The minimum value of nraw is 1, and the maximum is equal to the value of a. If nraw is greater than the value of a; the current point to be smoothed forward has a total of npre global path points, and the current point to be smoothed backward has a total of nback global path points, then the final Taking the current point to be smoothed as the center, select n global path points forward and backward respectively, and n is calculated according to the following formula.
n=min(nraw,npre,nback)。n=min(nraw , npre , nback ).
进一步地,步骤(6)中,从起点计数的第i个未调整位置的平滑前路径点Pi作为当前的待平滑点,其坐标是(Xi,Yi),若以数量2n个路径点对Pi作平滑处理,则以Pi为中心沿全局路径分别向前和向后各搜索n个平滑前路径点,记第x个路径点Px坐标(Xx,Yx),x的取值范围是i-n和i+n之间的正整数,从点Px与点Pi沿全局路径线段的距离是dx,结合归一化处理最终得到Pi平滑后的坐标(Xinew,Yinew),Xinew和Yinew计算公式如下式所示:Further, in step (6), the path point Pi before smoothing at the i-th unadjusted position counted from the starting point is used as the current point to be smoothed, and its coordinates are (Xi , Yi ), if the number of 2n paths is Point to Pi is smoothed, then take Pi as the center and search for n path points before smoothing forward and backward respectively along the global path, record the x-th path point Px coordinates (Xx , Yx ), x The value range of is a positive integer between in and i+n, and the distance from point Px to point Pi along the global path line segment is dx . Combined with normalization, the smoothed coordinates of Pi are finally obtained (Xinew , Yinew ), Xinew and Yinew are calculated as follows:


最终将平滑后的坐标(Xinew,Yinew)作为Pi的新坐标,即平滑路径的第i个路径点位置。Finally, the smoothed coordinates (Xinew , Yinew ) are taken as the new coordinates of Pi , that is, the position of the i-th path point of the smoothed path.
本发明的有益效果:与传统的贝塞尔曲线或B样条曲线等路径平滑算法相比,本发明平滑后的全局路径点是偏差可控的,根据设置的安全阈值调节平滑时参考节点的数量能够确保平滑后的路径点不在障碍物上;与基于梯度下降法等平滑算法相比,该本发明计算量小,易于使用。本发明提出的基于一种基于距离权重的移动机器人全局路径平滑方法能有效提高全局路径的平滑度,从而改善移动机器人的行驶状态并提高工作效率。Beneficial effects of the present invention: Compared with the traditional Bezier curve or B-spline curve and other path smoothing algorithms, the global path point after smoothing of the present invention has a controllable deviation, and the smoothing process is adjusted according to the set safety threshold. The number can ensure that the smoothed path points are not on obstacles; compared with smoothing algorithms such as gradient descent, the present invention requires less computation and is easy to use. The method for smoothing the global path of a mobile robot based on a distance weight proposed by the present invention can effectively improve the smoothness of the global path, thereby improving the driving state of the mobile robot and improving the work efficiency.
附图说明Description of drawings
图1是基于距离权重的移动机器人全局路径平滑方法的主要实现步骤的流程图。Fig. 1 is a flow chart of the main implementation steps of a distance weight-based global path smoothing method for a mobile robot.
图2是本发明的栅格图示意。FIG. 2 is a schematic diagram of a grid diagram of the present invention.
图3是本发明的初始路径点密化处理。Figure 3 is the initial waypoint densification process of the present invention.
图4是本发明的带平滑点的平滑示意图。Figure 4 is a schematic diagram of smoothing with smoothing points of the present invention.
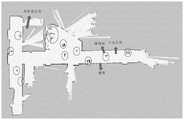
图5是本发明采用Gmapping方法构建的环境地图。FIG. 5 is an environment map constructed by using the Gmapping method in the present invention.
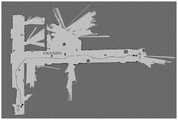
图6是本发明的初始全局路径图。Figure 6 is an initial global path diagram of the present invention.
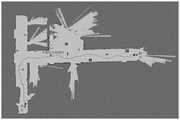
图7是本发明的平滑后全局路径图。FIG. 7 is a smoothed global path diagram of the present invention.
具体实施方式Detailed ways
下面结合附图对本发明作进一步说明。The present invention will be further described below in conjunction with the accompanying drawings.
本发明采用基于距离权重的移动机器人全局路径平滑方法对栅格地图中的移动机器人的全局路径点进行位置调整,将调整后的路径点作为移动机器人的新的全局路径,实现对原始全局路径的平滑。The invention adopts the global path smoothing method of the mobile robot based on the distance weight to adjust the position of the global path point of the mobile robot in the grid map, and uses the adjusted path point as the new global path of the mobile robot, so as to realize the adjustment of the original global path. smooth.
如图1所示的,本发明包含以下八个主要步骤:As shown in Figure 1, the present invention includes the following eight main steps:
A1:设定栅格地图精度,每个栅格的边长大小是m毫米,根据所设定的栅格地图精度构建栅格地图,本发明采用的建图方法是Gmapping方法;所设定栅格地图精度会影响到移动机器人的定位精度、路径跟踪精度和停车精度,应根据移动机器人实际应用需求和CPU性能做相应的调整。A1: Set the grid map precision, the side length of each grid is m millimeters, and construct a grid map according to the set grid map precision. The mapping method adopted in the present invention is the Gmapping method; The grid map accuracy will affect the positioning accuracy, path tracking accuracy and parking accuracy of the mobile robot, and should be adjusted according to the actual application requirements of the mobile robot and the CPU performance.
A2:设定移动机器人的安全阈值,安全阈值定义为移动机器人的全局路径点要与障碍物至少保持ds米;设定移动机器人的安全阈值能保证移动机器人的初始全局路径点与障碍物至少保持x米,安全阈值越大,初始全局路径与障碍物的最小距离越大,但可能会导致全局路径长度增大,根据移动机器人实际工作环境和工作需求进行设定。A2: Set the safety threshold of the mobile robot. The safety threshold is defined as the global path point of the mobile robot should be at least ds meters away from the obstacle; setting the safety threshold of the mobile robot can ensure that the initial global path point of the mobile robot and the obstacle are at least d s meters. Keep x meters, the larger the safety threshold, the greater the minimum distance between the initial global path and the obstacle, but it may lead to an increase in the global path length, which should be set according to the actual working environment and work requirements of the mobile robot.
A3:指定全局路径规划起点和终点,根据A2设置的安全距离并选择适用的路径搜索方法生成全局路径点,本发明推荐使用的路径搜索方法有A*、d*lite等,A3中生成全局路径点定义为初始路径点;在A1构建的栅格地图上进行全局路径规划,本发明要求规划全局路径时考虑A1栅格地图边长m毫米和A2设定的安全阈值ds米,具体操作是要求全局路径搜索时以待搜索点为中心向外扩散至少a个栅格,a按照公式(1)计算。A3: Specify the starting point and end point of the global path planning, and generate the global path point according to the safety distance set by A2 and select the applicable path search method. The path search methods recommended in the present invention include A*, d*lite, etc. The global path is generated in A3 The point is defined as the initial path point; the global path planning is performed on the grid map constructed by A1. The present invention requires that the side length of the grid map of A1 is m mm and the safety threshold set by A2 is ds m when planning the global path. The specific operation is as follows: When global path search is required, at least a grids are spread outward from the point to be searched as the center, and a is calculated according to formula (1).

如图2是一个简易的栅格地图,其中坐标(3,3)的栅格表示待搜索栅格且空闲,坐标(2,2)的栅格表示障碍物栅格。假设全局路径要与障碍物保持至少一个栅格的距离,搜索全局路径时不仅需要判断是否当前点(3,3)是否空闲,也要判断其周围点(2,2)、(2,3)、(2,4)、(3,2)、(4,2)、(4,3)、(4,4)和(3,4)是否空闲,因为点(2,2)存在障碍物,因此将(3,3)设置为已搜索并不作为待选路径点,同时将障碍物点(2,2)和其余的附近点都设置为已搜索并不作为待选路径点。Figure 2 is a simple grid map, where the grid with coordinates (3, 3) represents the grid to be searched and is free, and the grid with coordinates (2, 2) represents the obstacle grid. Assuming that the global path needs to maintain a distance of at least one grid from the obstacle, when searching for the global path, it is not only necessary to judge whether the current point (3,3) is free, but also the surrounding points (2,2), (2,3) , (2,4), (3,2), (4,2), (4,3), (4,4) and (3,4) are free because there is an obstacle at point (2,2), Therefore, (3,3) is set to be searched and not used as the path point to be selected, and the obstacle point (2,2) and other nearby points are set to be searched and not used as the path point to be selected.
A4:全局路径点密化处理,在初始路径点位置保持不变的前提下相对均匀地增添新的路径点,将A4增加的点和A3的初始路径点统称为平滑前路径点;路径点密化处理能使得平滑后的全局路径具有良好的保形性,不至于与原始路径点位置偏差过大,但是过于密集的路径点会造成计算量大,可根据移动机器人实际工作环境和工作需求增加路径点密度。本发明采用增添中心点的方法对全局路径点进行密化处理。若(x1,y1)和(x2,y2)是相邻路径点,则插入新的中心路径点(xnew,ynew),xnew和ynew分别按照公式(2)和公式(3)计算。将图2的路径点按照A4的方法密化处理得到图3。A4: Global path point densification processing, adding new path points relatively uniformly on the premise that the initial path point position remains unchanged, the points added by A4 and the initial path points of A3 are collectively referred to as the path points before smoothing; The processing can make the smoothed global path have good shape retention, and will not deviate too much from the original path point, but too dense path points will cause a large amount of calculation, which can be increased according to the actual working environment and work requirements of the mobile robot. Waypoint density. The invention adopts the method of adding center points to densify the global path points. If (x1 , y1 ) and (x2 , y2 ) are adjacent path points, insert a new central path point (xnew , ynew ), xnew and ynew respectively according to formula (2) and formula (3) Calculation. Figure 3 is obtained by densifying the waypoint of Figure 2 according to the method of A4.


A5:设定平滑权重,待平滑点的位置调整依据是参考点与待平滑点沿全局路径线段的长度,长度与权重成反比,长度越长,则平滑时的权重越低。本发明采用距离的倒数作为权重,即某参考全局路径点与当前待平滑点的距离是d,则平滑时该参考全局路径点所占的权重为
A6:从起点到终点依次对全局路径点进行平滑调整。从起点开始,依次选择还未调整位置的平滑前路径点作为当前的待平滑点,若当前的待平滑点为终点则结束流程,否则以当前的待平滑点为中心选取若干路径参考点;A6: Smoothly adjust the global path points sequentially from the start point to the end point. Starting from the starting point, select the path points before smoothing whose positions have not been adjusted in turn as the current point to be smoothed. If the current point to be smoothed is the end point, the process ends, otherwise, select several path reference points with the current point to be smoothed as the center;
A7:参考A1地图精度和A2安全阈值,根据全局路径点的顺序以当前待平滑点为中心分别向前和向后选取等量的平滑前路径点作为路径参考点;若初始设置时要求分别向前和向后各选取nraw个路径点。nraw具体根据实际应用场景需求取值,nraw越小平滑后的路径则与初始路径的偏差越小,nraw越大则平滑后的路径的平滑度越高。nraw最小等于1,若nraw等于0,则无平滑效果;nraw最大等于A3步骤中的a值,若nraw大于a值,则平滑后的路径点有可能会落在障碍物上。当前待平滑点向前总共有npre个全局路径点,当前待平滑点向后总共有nback个全局路径点,则最终以当前待平滑点为中心分别向前和向后选择n个全局路径点,n按照公式(4)计算。A7: Referring to the map accuracy of A1 and the safety threshold of A2, according to the order of the global path points, taking the current point to be smoothed as the center, select the same amount of path points before smoothing forward and backward respectively as path reference points; Select nraw waypoints forward and backward. The value of nraw is determined according to the actual application scenario requirements. The smaller nraw is, the smaller the deviation of the smoothed path from the initial path is, and the larger nraw is, the smoother the smoothed path is. The minimum value of nraw is 1. If nraw is equal to 0, there is no smoothing effect. The maximum value of nraw is equal to the value of a in step A3. If nraw is greater than the value of a, the smoothed path point may fall on obstacles. The current point to be smoothed forward has a total of npre global path points, and the current point to be smoothed backward has a total of nback global path points, then finally select n global paths forward and backward respectively centered on the current point to be smoothed point, n is calculated according to formula (4).
n=min(nraw,npre,nback)(4)n=min(nraw ,npre ,nback )(4)
A8:根据选取的路径参考点和设定的平滑权重调整待平滑点的位置,调整后的路径点位置即平滑路径的路径点位置,并返回A6继续执行。如图4所示,从起点计数的第i个平滑前路径点Pi是当前待平滑点,其坐标是(Xi,Yi),若以数量2n个路径点对Pi作平滑处理,则以Pi为中心沿全局路径分别向前和向后各搜索n个路径点,记第x个路径点Px坐标(Xx,Yx),x的取值范围是i-n和i+n之间的正整数,从点Px与点Pi沿全局路径线段的距离是dx,结合归一化处理最终得到Pi平滑后的坐标(Xinew,Yinew),Xinew和Yinew计算公式如(5)和公式(6)。A8: Adjust the position of the point to be smoothed according to the selected path reference point and the set smoothing weight. The adjusted path point position is the path point position of the smooth path, and return to A6 to continue execution. As shown in Figure 4, thei -th pre-smoothing path point Pi counted from the starting point is the current point to be smoothed, and its coordinates are (Xi , Yi ). Then take Pi as the center and search forn path points forward and backward respectively along the global path, note the xth path point Px coordinate (Xx , Yx ), the value range of x is in and i+n A positive integer between, the distance from point Px to point Pi along the global path line segment is dx , combined with normalization, the smoothed coordinates of Pi (Xinew , Yinew ), Xinew and Yinew are finally obtained Calculation formulas such as (5) and formula (6).


最终将平滑后的坐标(Xinew,Yinew)作为路径点Pi的新坐标,将所有路径点依次按照本发明的方法调整后即可得到平滑的全局路径。Finally, the smoothed coordinates (Xinew , Yinew ) are used as the new coordinates of the path point Pi , and a smooth global path can be obtained by adjusting all the path points sequentially according to the method of the present invention.
本发明已经进行了多次实施试验验证,如图5、图6和图7是根据本发明具体实时步骤得到的某次实验图。本次实验选取的实验环境为实验室所处大楼一楼。根据步骤A1,设定的栅格边长m为25mm,选择Gmapping建图方法构建实验环境的地图如图5所示,其中自由区域、障碍物或墙壁等不可通行区域和未探索区域已在图5中标出。由于走廊略空阔,为增加环境的复杂性,人为在走廊中放置障碍物,如图5所示椭圆部分,椭圆只是为标明人工放置的障碍物的位置而非建图所得;根据步骤A2,设定安全阈值ds为0.25m;根据步骤A3,选择路径搜索方法A*,并根据公式(1)计算得到搜索路径点时需要向外扩散1个栅格;根据步骤A4,在初始点中插入中点密化路径点;根据步骤A5,选择



本发明的多次实验都证明了本发明方法的可行性和有效性,实现了发明目的:对移动机器人的全局路径点进行平滑处理,能够保证平滑后的全局路径点是偏差可控的,确保平滑后的路径点不在障碍物上,且具有计算量小和易于使用的优点,能有效改善全局路径的平滑性,提高机器人的移动状态和效率。Multiple experiments of the present invention have proved the feasibility and effectiveness of the method of the present invention, and achieved the purpose of the invention: smoothing the global path points of the mobile robot can ensure that the smoothed global path points are deviation-controllable, ensuring that The smoothed path point is not on the obstacle, and has the advantages of small calculation and easy use, which can effectively improve the smoothness of the global path and improve the moving state and efficiency of the robot.
以上内容是针对该方法流程的具体介绍,不能认定本发明的具体实施只局限于该实施例。熟悉本领域的技术人员在不违背本发明创造精神的前提下还可做出种种的等同的变型或替换,这些等同的变型或替换均包含在本申请的范围内。The above content is a specific introduction to the flow of the method, and it cannot be assumed that the specific implementation of the present invention is limited to this embodiment. Those skilled in the art can make various equivalent modifications or substitutions without departing from the inventive spirit of the present invention, and these equivalent modifications or substitutions are all included within the scope of the present application.
Claims (6)






Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210548004.8ACN114879678A (en) | 2022-05-18 | 2022-05-18 | Distance weight-based global path smoothing method for mobile robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210548004.8ACN114879678A (en) | 2022-05-18 | 2022-05-18 | Distance weight-based global path smoothing method for mobile robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114879678Atrue CN114879678A (en) | 2022-08-09 |
Family
ID=82677555
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210548004.8APendingCN114879678A (en) | 2022-05-18 | 2022-05-18 | Distance weight-based global path smoothing method for mobile robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114879678A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115562272A (en)* | 2022-10-10 | 2023-01-03 | 北京信息科技大学 | Method and device for planning robot travel path |
| CN115628751A (en)* | 2022-11-03 | 2023-01-20 | 中寰卫星导航通信有限公司 | Method and device for managing path point location and computer readable storage medium |
| CN118396884A (en)* | 2024-05-28 | 2024-07-26 | 小米汽车科技有限公司 | Vector map data smoothing processing method, device, equipment and storage medium |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104950883A (en)* | 2015-05-14 | 2015-09-30 | 西安电子科技大学 | Mobile robot route planning method based on distance grid map |
| CN109799822A (en)* | 2019-01-30 | 2019-05-24 | 中国石油大学(华东) | Mobile robot global smooth paths planing method |
| CN111880539A (en)* | 2020-07-30 | 2020-11-03 | 上海高仙自动化科技发展有限公司 | Movement control method and device for intelligent robot, intelligent robot and readable storage medium |
| CN112327853A (en)* | 2020-11-11 | 2021-02-05 | 中山大学 | A Hard Constraint Optimization Problem-Based Robot Smooth Trajectory Planning Method Guaranteed to Stay Away from Obstacles |
| CN112947490A (en)* | 2021-04-09 | 2021-06-11 | 京东数科海益信息科技有限公司 | Path smoothing method, device, equipment, storage medium and product |
| CN114489061A (en)* | 2022-01-17 | 2022-05-13 | 湖北工业大学 | A Smooth Path Planning Method Based on Whale Optimization Algorithm |
- 2022
- 2022-05-18CNCN202210548004.8Apatent/CN114879678A/enactivePending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104950883A (en)* | 2015-05-14 | 2015-09-30 | 西安电子科技大学 | Mobile robot route planning method based on distance grid map |
| CN109799822A (en)* | 2019-01-30 | 2019-05-24 | 中国石油大学(华东) | Mobile robot global smooth paths planing method |
| CN111880539A (en)* | 2020-07-30 | 2020-11-03 | 上海高仙自动化科技发展有限公司 | Movement control method and device for intelligent robot, intelligent robot and readable storage medium |
| CN112327853A (en)* | 2020-11-11 | 2021-02-05 | 中山大学 | A Hard Constraint Optimization Problem-Based Robot Smooth Trajectory Planning Method Guaranteed to Stay Away from Obstacles |
| CN112947490A (en)* | 2021-04-09 | 2021-06-11 | 京东数科海益信息科技有限公司 | Path smoothing method, device, equipment, storage medium and product |
| CN114489061A (en)* | 2022-01-17 | 2022-05-13 | 湖北工业大学 | A Smooth Path Planning Method Based on Whale Optimization Algorithm |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115562272A (en)* | 2022-10-10 | 2023-01-03 | 北京信息科技大学 | Method and device for planning robot travel path |
| CN115628751A (en)* | 2022-11-03 | 2023-01-20 | 中寰卫星导航通信有限公司 | Method and device for managing path point location and computer readable storage medium |
| CN118396884A (en)* | 2024-05-28 | 2024-07-26 | 小米汽车科技有限公司 | Vector map data smoothing processing method, device, equipment and storage medium |
| CN118396884B (en)* | 2024-05-28 | 2025-02-18 | 小米汽车科技有限公司 | Vector map data smoothing method, device, equipment and storage medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114879678A (en) | Distance weight-based global path smoothing method for mobile robot | |
| US10768602B2 (en) | Curve velocity planning method, device, and numerical control machining route data processing method thereof | |
| CN112179351B (en) | Three-dimensional obstacle avoidance track planning method based on pre-planned path optimization RRT algorithm | |
| CN106393106B (en) | The robot nurbs curve of parameter adaptive densification moves interpolating method | |
| CN112344943B (en) | Intelligent vehicle path planning method for improving artificial potential field algorithm | |
| CN112486101B (en) | NURBS curve self-adaptive look-ahead interpolation method | |
| CN109571473A (en) | A kind of small line segment track method for fairing that error is controllable | |
| CN107765648B (en) | CNC machining feeding speed planning method and device | |
| CN112549016A (en) | Mechanical arm motion planning method | |
| CN109931943B (en) | Unmanned ship global path planning method and electronic equipment | |
| CN104615084A (en) | Machining feed speed optimized tool path curve contour error compensation method | |
| Sa et al. | Research of mobile robot path planning based on improved A* algorithm | |
| CN110216673A (en) | The non-dominant neighborhood immune genetic Multipurpose Optimal Method of electro-hydraulic joint of robot track | |
| CN112975992B (en) | Error-controllable robot track synchronous optimization method | |
| CN110095120A (en) | Biology of the Autonomous Underwater aircraft under ocean circulation inspires Self-organizing Maps paths planning method | |
| CN107844058A (en) | A kind of curve movement Discrete Dynamic Programming method | |
| CN115542912B (en) | A mobile robot path planning method based on improved Q-learning algorithm | |
| CN116734877A (en) | Robot dynamic obstacle avoidance method based on improved A* algorithm and dynamic window method | |
| CN113504764B (en) | Continuous line segment numerical control machining path smoothing method based on position vector weighted integration | |
| CN110530373B (en) | A robot path planning method, controller and system | |
| CN101996516A (en) | Path planning pretreatment method based on vector method | |
| CN108994838A (en) | The relationship calculation method and system of robot location and planning path | |
| CN115127495A (en) | A method and system for acquiring information of over and under excavation areas in a tunnel | |
| CN117850476A (en) | Multi-agent cluster obstacle avoidance method based on rolling rapid expansion random tree algorithm | |
| CN114092676B (en) | Three-dimensional model adjustment method, device, equipment and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |