CN114779010A - Fault traveling wave detection method based on symmetric differential energy operator and neural network - Google Patents
Fault traveling wave detection method based on symmetric differential energy operator and neural networkDownload PDFInfo
- Publication number
- CN114779010A CN114779010ACN202210429039.XACN202210429039ACN114779010ACN 114779010 ACN114779010 ACN 114779010ACN 202210429039 ACN202210429039 ACN 202210429039ACN 114779010 ACN114779010 ACN 114779010A
- Authority
- CN
- China
- Prior art keywords
- fault
- line
- mode voltage
- traveling wave
- voltage component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/08—Locating faults in cables, transmission lines, or networks
- G01R31/088—Aspects of digital computing
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/29—Graphical models, e.g. Bayesian networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
- G06F2218/12—Classification; Matching
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Mathematical Physics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Computational Linguistics (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Software Systems (AREA)
- Locating Faults (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及配电线路故障检测技术领域,尤其是涉及基于对称差分能量算子和神经网络的故障行波检测方法。The invention relates to the technical field of fault detection of distribution lines, in particular to a fault traveling wave detection method based on a symmetrical differential energy operator and a neural network.
背景技术Background technique
随着智能电网的快速发展,配电网在电力系统中起着越来越重要的作用,配电线路作为配电网的重要组成部分,其故障检测技术对于配电网的安全稳定运行至关重要。With the rapid development of the smart grid, the distribution network plays an increasingly important role in the power system. As an important part of the distribution network, the fault detection technology of the distribution line is crucial to the safe and stable operation of the distribution network. important.
现有的配网故障监测装置普遍存在判定故障不可靠、无法精确定位等问题1,为了加快智能电网的配电自动化建设,应在故障后快速地对该故障进行定位,修复故障使系统恢复稳定状态。Existing distribution network fault monitoring devices generally have problems such as unreliable fault determination and inability to accurately locate. state.
传统的定位故障的方式已经无法满足当前电力系统发展的要求,因此,提出精准、快速的故障定位方法对配电系统的稳定运行有着非常重要的意义。The traditional way of locating faults can no longer meet the requirements of the current power system development. Therefore, it is very important to propose an accurate and fast fault locating method for the stable operation of the power distribution system.
发明内容SUMMARY OF THE INVENTION
本发明的目的是提供基于对称差分能量算子和神经网络的故障行波检测方法,以解决现有技术中配电线路故障定位不够精准、效率较低的技术问题。The purpose of the present invention is to provide a fault traveling wave detection method based on a symmetrical differential energy operator and a neural network, so as to solve the technical problems of inaccurate fault location and low efficiency of distribution lines in the prior art.
本发明的目的,可以通过如下技术方案实现:The object of the present invention can be realized by the following technical solutions:
基于对称差分能量算子和神经网络的故障行波检测方法,包括:Fault traveling wave detection method based on symmetric differential energy operator and neural network, including:
通过多个采样点获取待检测故障的三相电压行波信号,对所述三相电压行波信号进行解耦变换得到线模电压分量,所述线模电压分量包括α线模电压分量和β线模电压分量;The three-phase voltage traveling wave signal of the fault to be detected is obtained through multiple sampling points, and the line-mode voltage component is obtained by decoupling and transforming the three-phase voltage traveling-wave signal. Line mode voltage component;
利用三点对称差分能量算子对所述α线模电压分量或所述β线模电压分量进行差分计算,得到与所述待检测故障对应的能量谱图;Using a three-point symmetric differential energy operator to perform differential calculation on the α line mode voltage component or the β line mode voltage component, to obtain an energy spectrum corresponding to the fault to be detected;
将所述能量谱图输入到训练好的线路故障诊断模型中,得到所述待检测故障的故障信息,所述线路故障诊断模型是用三点对称差分能量算子对各种线路故障的线模电压分量进行差分计算得到的能量谱图进行训练得到的。The energy spectrum is input into the trained line fault diagnosis model to obtain the fault information of the fault to be detected. The line fault diagnosis model is a line model of various line faults using a three-point symmetric differential energy operator. The energy spectrum obtained by the differential calculation of the voltage component is obtained by training.
可选地,得到所述待检测故障的故障信息具体包括:Optionally, obtaining the fault information of the fault to be detected specifically includes:
得到所述待检测故障的所在线路分支和所属故障类型。Obtain the line branch where the fault to be detected is located and the fault type it belongs to.
可选地,得到所述待检测故障的故障信息之后还包括:Optionally, after obtaining the fault information of the fault to be detected, it further includes:
利用在所述待检测故障的所在线路分支两端采集的故障行波信号进行双端定位,得到所述待检测故障的精确位置。Double-end positioning is performed using the fault traveling wave signals collected at both ends of the line branch where the fault to be detected is located, so as to obtain the precise position of the fault to be detected.
可选地,对所述三相电压行波信号进行解耦变换得到线模电压分量具体包括:Optionally, decoupling and transforming the three-phase voltage traveling wave signal to obtain a line-mode voltage component specifically includes:
通过凯伦贝尔变换对所述三相电压行波信号进行解耦变换得到线模电压分量。The line-mode voltage component is obtained by decoupling and transforming the three-phase voltage traveling wave signal through Karen Bell transform.
可选地,所述α线模电压分量为:Optionally, the α line mode voltage component is:
Uα=(UA-UB)/3;Uα =(UA -UB )/3;
其中,Uα为α线模电压分量,UA为A相电压信号,UB为B相电压信号。可选地,所述β线模电压分量为:Among them, Uα is the α line mode voltage component, UA is the A-phase voltage signal, and UB is the B-phase voltage signal. Optionally, the beta line mode voltage component is:
Uβ=(UA-UC)/3;Uβ =(UA -UC )/3;
其中,Uβ为β线模电压分量,UC为C相电压信号。Among them, Uβ is the β line mode voltage component, and UC is the C-phase voltage signal.
可选地,利用三点对称差分能量算子对所述α线模电压分量或所述β线模电压分量进行差分计算,得到与所述待检测故障对应的能量谱图具体包括:Optionally, using a three-point symmetric differential energy operator to perform differential calculation on the α line mode voltage component or the β line mode voltage component, and obtaining an energy spectrum corresponding to the fault to be detected specifically includes:
利用公式
其中,ψ[s(n)]表示第n个采样点对应的能量算子,F(s(n))为计算过程中引入的算子,F(s(n))=s2(n)-s(n+1)s(n-1);s(n)为第n个采样点对应的信号,s(n+1)为第n+1个采样点对应的信号,s(n-1)为第n-1个采样点对应的信号。Among them, ψ[s(n)] represents the energy operator corresponding to the nth sampling point, F(s(n)) is the operator introduced in the calculation process, F(s(n))=s2 (n) -s(n+1)s(n-1); s(n) is the signal corresponding to the nth sampling point, s(n+1) is the signal corresponding to the n+1th sampling point, s(n- 1) is the signal corresponding to the n-1th sampling point.
可选地,所述线路故障诊断模型的训练过程包括:Optionally, the training process of the line fault diagnosis model includes:
仿真模拟各种线路故障并提取故障发生时的多个三相电压行波信号,对各三相电压行波信号进行解耦变换,得到对应的α线模电压分量和β线模电压分量;Simulate and simulate various line faults, extract multiple three-phase voltage traveling wave signals when the fault occurs, decouple and transform each three-phase voltage traveling wave signal, and obtain the corresponding α-line mode voltage components and β-line mode voltage components;
利用三点对称差分能量算子对各α模电压或各β线模电压分量进行差分计算,得到对应的能量谱图并构成训练数据集;The three-point symmetric differential energy operator is used to differentially calculate each α-mode voltage or each β-line-mode voltage component to obtain the corresponding energy spectrum and form a training data set;
根据所述训练数据集对所述线路故障诊断模型进行训练,得到训练好的所述线路故障诊断模型。The line fault diagnosis model is trained according to the training data set to obtain the trained line fault diagnosis model.
本发明提供了基于对称差分能量算子和神经网络的故障行波检测方法,包括:通过多个采样点获取待检测故障的三相电压行波信号,对所述三相电压行波信号进行解耦变换得到线模电压分量,所述线模电压分量包括α线模电压分量和β线模电压分量;利用三点对称差分能量算子对所述α线模电压分量或所述β线模电压分量进行差分计算,得到与所述待检测故障对应的能量谱图;将所述能量谱图输入到训练好的线路故障诊断模型中,得到所述待检测故障的故障信息,所述线路故障诊断模型是用三点对称差分能量算子对各种线路故障的线模电压分量进行差分计算得到的能量谱图进行训练得到的。The present invention provides a fault traveling wave detection method based on a symmetrical differential energy operator and a neural network. The line-mode voltage component is obtained by coupling transformation, and the line-mode voltage component includes an α-line-mode voltage component and a Perform differential calculation of the components to obtain the energy spectrum corresponding to the fault to be detected; input the energy spectrum into the trained line fault diagnosis model to obtain the fault information of the fault to be detected, and the line fault diagnosis The model is obtained by training the energy spectrum obtained by differentially calculating the line-mode voltage components of various line faults with a three-point symmetric differential energy operator.
有鉴如此,本发明带来的有益效果是:In view of this, the beneficial effects brought by the present invention are:
本发明中通过获取待检测故障的三相电压行波信号并进行解耦变换得到线模电压分量,利用三点对称差分能量算子对线模电压分量进行差分计算,得到对应的DEO3S能量谱图,三点对称差分能量算子相对传统的Teager能量算子具有更好的包络图效果;将DEO3S能量谱图输入到训练好的线路故障诊断模型中,可以快速判定线路故障的所在故障分支和故障类型,能较好地解决多分支情况下行波定位困难的问题,具有较好的可靠性。In the present invention, the line-mode voltage component is obtained by acquiring the three-phase voltage traveling wave signal of the fault to be detected and decoupling and transforming it, and the line-mode voltage component is differentially calculated by using a three-point symmetric differential energy operator to obtain the corresponding DEO3S energy spectrum. , the three-point symmetric differential energy operator has a better envelope effect than the traditional Teager energy operator; inputting the DEO3S energy spectrum into the trained line fault diagnosis model can quickly determine the fault branch and the fault branch of the line fault. The fault type can better solve the problem of difficulty in locating downlink waves in the case of multiple branches, and has good reliability.
附图说明Description of drawings
图1为本发明方法的流程示意图;Fig. 1 is the schematic flow chart of the method of the present invention;
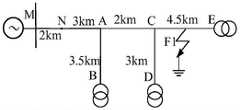
图2为本发明实施例的多分支线路结构示意图;2 is a schematic structural diagram of a multi-branch line according to an embodiment of the present invention;
图3为本发明实施例的线路M端电压行波线路分量图;FIG. 3 is a component diagram of a voltage traveling wave line at the M terminal of the line according to an embodiment of the present invention;
图4为本发明实施例的线路M端DEOS3能量谱示意图;Fig. 4 is the schematic diagram of the DEOS3 energy spectrum of the line M end according to the embodiment of the present invention;
图5为本发明另一实施例的流程图示意图。FIG. 5 is a schematic flowchart of another embodiment of the present invention.
具体实施方式Detailed ways
本发明实施例提供了基于对称差分能量算子和神经网络的故障行波检测方法,以解决现有技术中配电线路故障定位不够精准、效率较低的技术问题。The embodiments of the present invention provide a fault traveling wave detection method based on a symmetric differential energy operator and a neural network, so as to solve the technical problems of inaccurate fault location and low efficiency of distribution lines in the prior art.
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的首选实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。In order to facilitate understanding of the present invention, the present invention will be described more fully hereinafter with reference to the related drawings. Preferred embodiments of the invention are shown in the accompanying drawings. However, the present invention may be embodied in many different forms and is not limited to the embodiments described herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete.
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。Unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. The terms used herein in the description of the present invention are for the purpose of describing specific embodiments only, and are not intended to limit the present invention. As used herein, the term "and/or" includes any and all combinations of one or more of the associated listed items.
卷积神经网络是深度学习的代表算法之一,学习效果稳定且不需要额外的特征处理,在计算机视觉、医学和健康管理等领域有着出色的表现,可以将其应用于图谱的识别、判定等方面。Convolutional neural network is one of the representative algorithms of deep learning. The learning effect is stable and does not require additional feature processing. It has excellent performance in the fields of computer vision, medicine and health management. It can be applied to the identification and judgment of graphs, etc. aspect.
三点对称差分能量算子在轴承故障测距领域使用广泛,比目前行波故障定位领域广为使用的Teager能量算子具有更好的包络图效果,并且解决了Teager能量算子中经常出现的端点效应的问题,是一种性能更为优越的算法。The three-point symmetric differential energy operator is widely used in the field of bearing fault location. It has a better envelope effect than the Teager energy operator that is widely used in the current traveling wave fault location field, and solves the problem that often occurs in the Teager energy operator. The problem of endpoint effect is a more superior algorithm.
请参阅图1,以下为本发明基于对称差分能量算子和神经网络的故障行波检测方法的实施例,包括:Referring to FIG. 1, the following is an embodiment of the fault traveling wave detection method based on the symmetrical differential energy operator and neural network of the present invention, including:
S100:通过多个采样点获取待检测故障的三相电压行波信号,对所述三相电压行波信号进行解耦变换得到线模电压分量,所述线模电压分量包括α线模电压分量和β线模电压分量;S100: Acquire a three-phase voltage traveling wave signal of the fault to be detected through a plurality of sampling points, and perform decoupling transformation on the three-phase voltage traveling wave signal to obtain a line-mode voltage component, where the line-mode voltage component includes an α line-mode voltage component and beta line mode voltage components;
S200:利用三点对称差分能量算子对所述α线模电压分量或所述β线模电压分量进行差分计算,得到与所述待检测故障对应的能量谱图;S200: Use a three-point symmetric differential energy operator to perform differential calculation on the α line mode voltage component or the β line mode voltage component, to obtain an energy spectrum corresponding to the fault to be detected;
S300:将所述能量谱图输入到训练好的线路故障诊断模型中,得到所述待检测故障的故障信息,所述线路故障诊断模型是用三点对称差分能量算子对各种线路故障的线模电压分量进行差分计算得到的能量谱图进行训练得到的。S300: Input the energy spectrum into the trained line fault diagnosis model to obtain the fault information of the fault to be detected. The line fault diagnosis model uses a three-point symmetric differential energy operator to detect various line faults. The energy spectrum obtained by the differential calculation of the line mode voltage component is obtained by training.
在步骤S100中,通过多个采样点采集实际待检测故障的三相电压行波信号;本实施例中,采集到的电压信号都是由多个采样点组成,优选的实施方式,采样率为10MHZ时,每两个相邻采样点的时间间隔为0.1μs。In step S100, the three-phase voltage traveling wave signal of the actual fault to be detected is collected through multiple sampling points; in this embodiment, the collected voltage signal is composed of multiple sampling points. In a preferred embodiment, the sampling rate is At 10MHz, the time interval between every two adjacent sampling points is 0.1μs.
由于输电线路中的三相电压行波信号是不完全独立的,它们之间存在着一种耦合关系,应对其进行解耦。本实施例中,采集到待检测故障的三相电压行波信号之后,对三相电压行波信号进行解耦变换,优选的实施方式,采用凯伦贝尔变换对线路故障的三相电压行波信号进行解耦变换,解耦得到α、β和0模三个独立的模分量,其中,α模、β模属于线模电压分量,0模属于零模电压分量。Since the three-phase voltage traveling wave signals in the transmission line are not completely independent, there is a coupling relationship between them, which should be decoupled. In this embodiment, after the three-phase voltage traveling wave signal of the fault to be detected is collected, the three-phase voltage traveling wave signal is decoupled and transformed. The signal is decoupled and transformed, and three independent mode components of α, β and 0 modes are obtained by decoupling. Among them, the α mode and the β mode belong to the line mode voltage component, and the 0 mode belongs to the zero mode voltage component.
凯伦贝尔变换的过程如公式(1)所示:The process of Karen Bell transformation is shown in formula (1):

其中,UA为A相电压信号,UB为B相电压信号,UC为C相电压信号;Uα为α线模电压分量,Uβ为β线模电压分量,U0零模电压分量。Among them, UA is the A-phase voltage signal, UB is the B-phase voltage signal, UC is the C-phase voltage signal; Uα is the α line-mode voltage component, Uβ is the β line-mode voltage component, and U0 is the zero-mode voltage component. .
在步骤S200中,利用三点对称差分能量算子对所述α线模电压分量或所述β线模电压分量进行差分计算,得到与所述待检测故障对应的能量谱图。In step S200, a three-point symmetric differential energy operator is used to perform differential calculation on the α line mode voltage component or the β line mode voltage component, to obtain an energy spectrum corresponding to the fault to be detected.
由于线模电压分量比零模电压分量衰减更慢,因此,本实施例中选用线模电压分量进行线路故障分析,可以选α线模电压分量或β线模电压分量进行线路故障分析。Since the line-mode voltage component decays more slowly than the zero-mode voltage component, in this embodiment, the line-mode voltage component is selected for line fault analysis, and the α-line-mode voltage component or the β-line-mode voltage component can be selected for line failure analysis.
具体的,可采用三点对称差分能量算子对α线模电压分量进行差分计算,得到对应的DEO3S能量谱图,利用公式(2)和公式(3)计算待检测故障所对应的DEO3S能量谱图:Specifically, the three-point symmetric differential energy operator can be used to differentially calculate the α line mode voltage component to obtain the corresponding DEO3S energy spectrum, and use formula (2) and formula (3) to calculate the DEO3S energy spectrum corresponding to the fault to be detected. picture:
F(s(n))=s2(n)-s(n+1)s(n-1); (2)F(s(n))=s2 (n)-s(n+1)s(n-1); (2)

其中,ψ[s(n)]表示第n个采样点对应的能量算子,F(s(n))为计算过程中引入的算子,s(n)为第n个采样点对应的信号,s(n+1)为第n+1个采样点对应的信号,s(n-1)为第n-1个采样点对应的信号。Among them, ψ[s(n)] represents the energy operator corresponding to the nth sampling point, F(s(n)) is the operator introduced in the calculation process, and s(n) is the signal corresponding to the nth sampling point , s(n+1) is the signal corresponding to the n+1th sampling point, and s(n-1) is the signal corresponding to the n-1th sampling point.
可以理解的是,采集到的电压信号是由多个采样点组成的,每个采样点都对应一个采样时间;其中,s(n)为第n个采样点对应的信号,具体为:第n个采样点进行采样时,采集到的某一个时刻的电压值。It can be understood that the collected voltage signal is composed of multiple sampling points, and each sampling point corresponds to a sampling time; among them, s(n) is the signal corresponding to the nth sampling point, specifically: the nth sampling point The voltage value collected at a certain moment when sampling at each sampling point.
值得说明的是,公式(2)和公式(3)是近几年提出的在机械领域应用广泛的现有技术,本方案将该技术用于故障行波检测领域。根据公式(2)(3)的算子可以计算出每个采样点对应的能量值,根据每个采样点对应的能量值绘制得到DEO3S能量谱图。DEO3S能量谱图和时间密切相关,可以用于表示一段时间中电压信号的能量波动。It is worth noting that formula (2) and formula (3) are existing technologies proposed in recent years that are widely used in the mechanical field, and this solution applies the technology to the field of fault traveling wave detection. According to the operators of formulas (2) and (3), the energy value corresponding to each sampling point can be calculated, and the DEO3S energy spectrum can be obtained by drawing the energy value corresponding to each sampling point. The DEO3S energy spectrum is closely related to time and can be used to represent the energy fluctuation of the voltage signal over a period of time.
由于三点对称差分能量算子在传统Teager能量算子的基础上做了平滑处理,相对于传统的Teager能量算子(TEO)而言,三点对称差分能量算子(DEO3S)具有更好的包络图效果,并且解决了Teager能量算子中经常出现的端点效应的问题,是一种性能更为优越的算法。Since the three-point symmetric difference energy operator is smoothed on the basis of the traditional Teager energy operator, compared with the traditional Teager energy operator (TEO), the three-point symmetric difference energy operator (DEO3S) has better performance It also solves the problem of end effect that often occurs in the Teager energy operator, and is an algorithm with better performance.
在步骤S300中,将所述能量谱图输入到训练好的线路故障诊断模型中,得到所述待检测故障的故障信息,所述线路故障诊断模型是用三点对称差分能量算子对各种线路故障的线模电压分量进行差分计算得到的能量谱图进行训练得到的。In step S300, the energy spectrum is input into the trained line fault diagnosis model to obtain the fault information of the to-be-detected fault. The line fault diagnosis model uses a three-point symmetric differential energy operator to The energy spectrum obtained by differential calculation of the line mode voltage component of the line fault is obtained by training.
本实施例中,将实际待检测故障信号对应的DEO3S能量谱图输入到训练好的线路故障诊断模型中进行识别,得到线路故障诊断结果,具体的,根据故障诊断结果能得到待检测故障的所在线路分支和所属故障类型。In this embodiment, the DEO3S energy spectrum corresponding to the actual fault signal to be detected is input into the trained line fault diagnosis model for identification, and the line fault diagnosis result is obtained. Specifically, the location of the fault to be detected can be obtained according to the fault diagnosis result. Line branch and fault type.
本实施例中,DEO3S能量谱图能表示线路故障后电压信号的能量波动情况,不同故障类型对应的能量谱幅值不同;不同故障线路分支则由于故障行波在各线路分支端点来回反射,DEO3S能量谱波峰对应的时间间隔会有明显不同,因此,根据线路故障对应的DEO3S能量谱图能确定线路故障的所在分支和故障类型。In this embodiment, the DEO3S energy spectrum can represent the energy fluctuation of the voltage signal after a line fault, and the energy spectrum amplitudes corresponding to different fault types are different; for different faulty line branches, the fault traveling wave is reflected back and forth at the end points of each line branch, and the DEO3S The time intervals corresponding to the peaks of the energy spectrum will be significantly different. Therefore, the branch and fault type of the line fault can be determined according to the DEO3S energy spectrum corresponding to the line fault.
值得说明的是,得到待检测故障对应的DEO3S能量谱图之后,将待检测故障对应的DEO3S能量谱图输入到训练好的线路故障诊断模型中,该线路故障诊断模型应对待检测故障对应的DEO3S能量谱图进行归一化处理,进行灰度转换并根据训练数据集的格式来格式化DEO3S能量谱图。It is worth noting that, after obtaining the DEO3S energy spectrum corresponding to the fault to be detected, input the DEO3S energy spectrum corresponding to the fault to be detected into the trained line fault diagnosis model, and the line fault diagnosis model should use the DEO3S corresponding to the fault to be detected. The energy spectrograms are normalized, grayscale converted and formatted according to the format of the training dataset.
本实施例中的线路故障诊断模型是基于DEO3S和CNN的卷积神经网络模型,线路故障诊断模型的训练过程包括:The line fault diagnosis model in this embodiment is a convolutional neural network model based on DEO3S and CNN, and the training process of the line fault diagnosis model includes:
仿真模拟各种线路故障并提取故障发生时的多个三相电压行波信号,对各三相电压行波信号进行解耦变换,得到对应的α线模电压分量和β线模电压分量;Simulate and simulate various line faults, extract multiple three-phase voltage traveling wave signals when the fault occurs, decouple and transform each three-phase voltage traveling wave signal, and obtain the corresponding α-line mode voltage components and β-line mode voltage components;
利用三点对称差分能量算子对各α模电压或各β线模电压分量进行差分计算,得到对应的能量谱图并构成训练数据集;The three-point symmetric differential energy operator is used to differentially calculate each α-mode voltage or each β-line-mode voltage component to obtain the corresponding energy spectrum and form a training data set;
根据所述训练数据集对所述线路故障诊断模型进行训练,得到训练好的所述线路故障诊断模型。The line fault diagnosis model is trained according to the training data set to obtain the trained line fault diagnosis model.
卷积神经网络(CNN)是深度学习的代表算法之一,学习效果稳定且不需要额外的特征处理,可以用于识别、处理DEO3S能量谱图。Convolutional Neural Network (CNN) is one of the representative algorithms of deep learning. The learning effect is stable and does not require additional feature processing. It can be used to identify and process the DEO3S energy spectrum.
卷积神经网络分为卷积层、池化层和全连接层,其中,卷积层和池化层用于图像的特征提取,而全连接层用于分类。本实施例中,线路故障诊断模型采用CNN卷积神经网络模型,采用两个卷积层、两个池化层、两个全连接层的基本结构,并在此基础上加入了两个批量归一化层(BN层)对输入图像进行归一化处理,提高训练速度及模型的泛化能力。Convolutional neural networks are divided into convolutional layers, pooling layers and fully connected layers. Among them, convolutional layers and pooling layers are used for image feature extraction, while fully connected layers are used for classification. In this embodiment, the line fault diagnosis model adopts the CNN convolutional neural network model, and adopts the basic structure of two convolution layers, two pooling layers, and two fully connected layers, and on this basis, two batch normalization layers are added. The normalization layer (BN layer) normalizes the input image to improve the training speed and the generalization ability of the model.
本实施例中,将各种线路故障对应的DEO3S能量谱图划分为训练数据集,将训练数据集输入到CNN卷积神经网络模型中进行训练,可以得到训练好的CNN卷积神经网络模型,该卷积神经网络模型就是基于DEO3S和CNN的线路故障诊断模型。In this embodiment, the DEO3S energy spectrograms corresponding to various line faults are divided into training data sets, and the training data sets are input into the CNN convolutional neural network model for training, and the trained CNN convolutional neural network model can be obtained, The convolutional neural network model is a line fault diagnosis model based on DEO3S and CNN.
本实施例提供的基于对称差分能量算子和神经网络的故障行波检测方法,通过获取待检测故障的三相电压行波信号并进行解耦变换得到线模电压分量,利用三点对称差分能量算子对线模电压分量进行差分计算,得到对应的DEO3S能量谱图,三点对称差分能量算子相对传统的Teager能量算子具有更好的包络图效果;将DEO3S能量谱图输入到训练好的线路故障诊断模型中,可以快速判定线路故障的所在故障分支和故障类型,能较好地解决多分支情况下行波定位困难的问题,具有较好的可靠性。The fault traveling wave detection method based on the symmetrical differential energy operator and neural network provided in this embodiment obtains the line-mode voltage component by acquiring the three-phase voltage traveling wave signal of the fault to be detected and decoupling and transforming it, and uses the three-point symmetrical differential energy The operator performs differential calculation on the line mode voltage component to obtain the corresponding DEO3S energy spectrum. The three-point symmetric differential energy operator has a better envelope effect than the traditional Teager energy operator; the DEO3S energy spectrum is input into the training. A good line fault diagnosis model can quickly determine the fault branch and fault type of the line fault.
请参阅图2,以下为本发明的具体应用实施例:Please refer to Fig. 2, the following is a specific application embodiment of the present invention:
在PSCAD仿真软件上搭建如图2所示的10kv配电网多分支线路模型,设置0.1ms时在C点右侧2.5km的F1处发生单相接地故障,接地电阻为5Ω,线路波速为2.98285×105km/s,采样率为10MHz,在M端(即配电线路的发送端)及各分支点、线路末端检测故障电压行波波形。The multi-branch line model of the 10kv distribution network shown in Figure 2 is built on the PSCAD simulation software. When the setting is 0.1ms, a single-phase ground fault occurs at F1, 2.5km to the right of point C, the grounding resistance is 5Ω, and the line wave speed is 2.98285 ×105km/s, the sampling rate is 10MHz, and the fault voltage traveling wave waveform is detected at the M end (ie, the transmitting end of the distribution line), each branch point, and the end of the line.
采集线路各端的电压行波信号,采用凯伦贝尔变换对线路故障的三相电压行波信号进行解耦变换,选择α线模电压分量进行故障分析,其中M端的α线模电压分量如图3所示。Collect the voltage traveling wave signal at each end of the line, use the Karen Bell transform to decouple the three-phase voltage traveling wave signal of the line fault, and select the α line mode voltage component for fault analysis. The α line mode voltage component of the M terminal is shown in Figure 3 shown.
然后,采用三点对称差分能量算子对α线模电压分量进行差分计算,得到如图4所示的DEO3S能量谱图,图4的横坐标为每两个相邻采样点的时间间隔,纵坐标为每个采样点对应的能量值,根据能量算子可以计算出每个采样点的能量值,由每个采样点的能量值绘制的图像即能量算子包络。Then, the three-point symmetric differential energy operator is used to differentially calculate the α line mode voltage component, and the DEO3S energy spectrum shown in Figure 4 is obtained. The abscissa of Figure 4 is the time interval between two adjacent sampling points, and the vertical The coordinates are the energy value corresponding to each sampling point. The energy value of each sampling point can be calculated according to the energy operator. The image drawn by the energy value of each sampling point is the energy operator envelope.
将图4的DEO3S能量谱图输入到训练好的基于DEO3S和CNN的线路故障诊断模型中,能确定当前故障的所在线路分支和所属故障类型。Input the DEO3S energy spectrogram in Figure 4 into the trained line fault diagnosis model based on DEO3S and CNN, which can determine the line branch and the fault type of the current fault.
线路故障诊断结果为:判定故障分支在CE线路分支,故障类型为单相接地故障。The line fault diagnosis result is: it is determined that the fault branch is in the CE line branch, and the fault type is a single-phase ground fault.
采用C、E两端采集的故障行波信号进行DEO3S双端定位,定位结果为:故障距离C点2.489km,即定位误差为11m。The fault traveling wave signals collected at both ends of C and E are used for DEO3S double-end positioning. The positioning result is: the fault distance from point C is 2.489km, that is, the positioning error is 11m.
利用本实施例提供的基于对称差分能量算子和神经网络的故障行波检测方法,可以快速判定线路故障的所在线路分支和所属故障类型,解决多分支情况下行波定位困难的问题,在判定得到故障分支和故障类型后,可以直接采用DEO3S能量谱进行双端定位,也可采用其他双端定位算法进行精确定位,具有较好的可靠性。Using the fault traveling wave detection method based on the symmetric differential energy operator and neural network provided in this embodiment, the line branch where the line fault is located and the type of the fault can be quickly determined, and the problem of difficulty in locating the traveling wave in the case of multiple branches can be solved. After the fault branch and fault type are identified, the DEO3S energy spectrum can be directly used for double-end positioning, or other double-end positioning algorithms can be used for precise positioning, which has good reliability.
请参阅图5,本发明基于对称差分能量算子和神经网络的故障行波检测方法的另一实施例,包括:Referring to FIG. 5, another embodiment of the fault traveling wave detection method based on the symmetric differential energy operator and the neural network of the present invention includes:
步骤一:首先,仿真模拟各种线路故障并提取故障时的电压行波信号,采用凯伦贝尔变换对线路故障的三相电压行波信号进行解耦变换,选择α线模电压分量进行故障分析;Step 1: First, simulate various line faults and extract the voltage traveling wave signal at the time of the fault, use the Karen Bell transform to decouple the three-phase voltage traveling wave signal of the line fault, and select the α line mode voltage component for fault analysis. ;
步骤二:采用三点对称差分能量算子对α线模电压分量进行差分计算,得到对应的DEO3S能量谱图并划分数据集;Step 2: Use the three-point symmetric differential energy operator to differentially calculate the α line mode voltage component to obtain the corresponding DEO3S energy spectrum and divide the data set;
步骤三:将DEO3S能量谱图数据集输入到卷积神经网络中进行训练,得到训练好的基于DEO3S和CNN的线路故障诊断模型;Step 3: Input the DEO3S energy spectrum data set into the convolutional neural network for training, and obtain a trained line fault diagnosis model based on DEO3S and CNN;
步骤四:对实际待测故障的三相电压行波信号进行步骤一和步骤二,得到对应的DEO3S能量谱图;Step 4:
步骤五:将实际待测故障对应的DEO3S能量谱图输入到训练好的基于DEO3S和CNN的线路故障诊断模型,通过线路故障诊断模型判断当前故障的所在分支和故障类型。Step 5: Input the DEO3S energy spectrum corresponding to the actual fault to be tested into the trained line fault diagnosis model based on DEO3S and CNN, and judge the branch and fault type of the current fault through the line fault diagnosis model.
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。Those skilled in the art can clearly understand that, for the convenience and brevity of description, the specific working process of the system, device and unit described above may refer to the corresponding process in the foregoing method embodiments, which will not be repeated here.
在本申请所提供的实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。In the embodiments provided in this application, it should be understood that the disclosed system, apparatus and method may be implemented in other manners. For example, the apparatus embodiments described above are only illustrative. For example, the division of the units is only a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components may be combined or Can be integrated into another system, or some features can be ignored, or not implemented. On the other hand, the shown or discussed mutual coupling or direct coupling or communication connection may be through some interfaces, indirect coupling or communication connection of devices or units, and may be in electrical, mechanical or other forms.
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。The units described as separate components may or may not be physically separated, and components displayed as units may or may not be physical units, that is, may be located in one place, or may be distributed to multiple network units. Some or all of the units may be selected according to actual needs to achieve the purpose of the solution in this embodiment.
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。In addition, each functional unit in each embodiment of the present invention may be integrated into one processing unit, or each unit may exist physically alone, or two or more units may be integrated into one unit. The above-mentioned integrated units may be implemented in the form of hardware, or may be implemented in the form of software functional units.
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(ROM,Read-OnlyMemory)、随机存取存储器(RAM,Random Access Memory)、磁碟或者光盘等各种可以存储程序代码的介质。The integrated unit, if implemented in the form of a software functional unit and sold or used as an independent product, may be stored in a computer-readable storage medium. Based on such understanding, the technical solution of the present invention is essentially or the part that contributes to the prior art, or all or part of the technical solution can be embodied in the form of a software product, and the computer software product is stored in a storage medium , including several instructions for causing a computer device (which may be a personal computer, a server, or a network device, etc.) to execute all or part of the steps of the methods described in the various embodiments of the present invention. The aforementioned storage medium includes: U disk, removable hard disk, Read-Only Memory (ROM, Read-Only Memory), Random Access Memory (RAM, Random Access Memory), magnetic disk or optical disk and other media that can store program codes.
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。The above embodiments are only used to illustrate the technical solutions of the present invention, but not to limit them; although the present invention has been described in detail with reference to the foregoing embodiments, those of ordinary skill in the art should understand that: The recorded technical solutions are modified, or some technical features thereof are equivalently replaced; and these modifications or replacements do not make the essence of the corresponding technical solutions deviate from the spirit and scope of the technical solutions of the embodiments of the present invention.
Claims (8)

Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210429039.XACN114779010A (en) | 2022-04-22 | 2022-04-22 | Fault traveling wave detection method based on symmetric differential energy operator and neural network |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210429039.XACN114779010A (en) | 2022-04-22 | 2022-04-22 | Fault traveling wave detection method based on symmetric differential energy operator and neural network |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114779010Atrue CN114779010A (en) | 2022-07-22 |
Family
ID=82430863
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210429039.XAPendingCN114779010A (en) | 2022-04-22 | 2022-04-22 | Fault traveling wave detection method based on symmetric differential energy operator and neural network |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114779010A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115963358A (en)* | 2023-03-13 | 2023-04-14 | 昆明理工大学 | Fault location method and system for hybrid three-terminal flexible direct-current transmission line |
| CN120254473A (en)* | 2025-03-17 | 2025-07-04 | 国投甘肃新能源有限公司 | A fault monitoring management method and system for 35kV wind farm overhead collector lines |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101975910A (en)* | 2010-09-07 | 2011-02-16 | 昆明理工大学 | Intelligent fault classification and location method for ultra-high voltage direct current transmission line |
| CN104849620A (en)* | 2015-05-28 | 2015-08-19 | 长沙理工大学 | Grounding grid fault diagnosis method based on BP neural network |
| CN109917228A (en)* | 2019-03-28 | 2019-06-21 | 国网上海市电力公司 | A ground fault location method for distribution network based on traveling wave method based on RBF neural network |
| CN110542831A (en)* | 2019-08-30 | 2019-12-06 | 国网河南省电力公司电力科学研究院 | A Fault Traveling Wave Detection Method Based on Variational Mode Decomposition and S-Transform |
| CN111239549A (en)* | 2020-02-18 | 2020-06-05 | 国网信通亿力科技有限责任公司 | A fast location method for distribution faults based on discrete wavelet transform |
| CN112051480A (en)* | 2020-08-06 | 2020-12-08 | 国网安徽省电力有限公司电力科学研究院 | Neural network power distribution network fault diagnosis method and system based on variational modal decomposition |
| CN112083275A (en)* | 2020-08-21 | 2020-12-15 | 广东电网有限责任公司广州供电局 | Distribution network fault type identification method and system |
| CN114034980A (en)* | 2021-11-12 | 2022-02-11 | 陕西省地方电力(集团)有限公司渭南供电分公司 | Distribution line fault detection method based on particle swarm optimization BP neural network |
| CN114113890A (en)* | 2021-11-23 | 2022-03-01 | 国网江西省电力有限公司电力科学研究院 | Multi-terminal fusion power distribution network fault positioning method based on traveling wave modulus transmission time difference |
- 2022
- 2022-04-22CNCN202210429039.XApatent/CN114779010A/enactivePending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101975910A (en)* | 2010-09-07 | 2011-02-16 | 昆明理工大学 | Intelligent fault classification and location method for ultra-high voltage direct current transmission line |
| CN104849620A (en)* | 2015-05-28 | 2015-08-19 | 长沙理工大学 | Grounding grid fault diagnosis method based on BP neural network |
| CN109917228A (en)* | 2019-03-28 | 2019-06-21 | 国网上海市电力公司 | A ground fault location method for distribution network based on traveling wave method based on RBF neural network |
| CN110542831A (en)* | 2019-08-30 | 2019-12-06 | 国网河南省电力公司电力科学研究院 | A Fault Traveling Wave Detection Method Based on Variational Mode Decomposition and S-Transform |
| CN111239549A (en)* | 2020-02-18 | 2020-06-05 | 国网信通亿力科技有限责任公司 | A fast location method for distribution faults based on discrete wavelet transform |
| CN112051480A (en)* | 2020-08-06 | 2020-12-08 | 国网安徽省电力有限公司电力科学研究院 | Neural network power distribution network fault diagnosis method and system based on variational modal decomposition |
| CN112083275A (en)* | 2020-08-21 | 2020-12-15 | 广东电网有限责任公司广州供电局 | Distribution network fault type identification method and system |
| CN114034980A (en)* | 2021-11-12 | 2022-02-11 | 陕西省地方电力(集团)有限公司渭南供电分公司 | Distribution line fault detection method based on particle swarm optimization BP neural network |
| CN114113890A (en)* | 2021-11-23 | 2022-03-01 | 国网江西省电力有限公司电力科学研究院 | Multi-terminal fusion power distribution network fault positioning method based on traveling wave modulus transmission time difference |
Non-Patent Citations (1)
| Title |
|---|
| 王婧羽: "基于SR-VMD-DEO3S的配电网故障测距方法研究", 《中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》, no. 3, 15 March 2022 (2022-03-15), pages 042 - 2518* |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115963358A (en)* | 2023-03-13 | 2023-04-14 | 昆明理工大学 | Fault location method and system for hybrid three-terminal flexible direct-current transmission line |
| CN115963358B (en)* | 2023-03-13 | 2023-08-04 | 昆明理工大学 | Mixed three-terminal flexible direct current transmission line fault location method and system |
| CN120254473A (en)* | 2025-03-17 | 2025-07-04 | 国投甘肃新能源有限公司 | A fault monitoring management method and system for 35kV wind farm overhead collector lines |
| CN120254473B (en)* | 2025-03-17 | 2025-09-12 | 国投甘肃新能源有限公司 | Fault monitoring management method and system for 35kV wind power plant overhead collector line |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112183647B (en) | Method for detecting and positioning sound faults of substation equipment based on deep learning | |
| CN114779010A (en) | Fault traveling wave detection method based on symmetric differential energy operator and neural network | |
| CN108435819B (en) | A method for detecting abnormal energy consumption of aluminum extrusion press | |
| CN111898644B (en) | An intelligent identification method for aerospace liquid engine health status under fault-free samples | |
| CN101907437A (en) | A Cable Fault Location Method Based on Wavelet Difference Algorithm | |
| CN115656817B (en) | Permanent magnet synchronous motor turn-to-turn short circuit fault detection method based on neural network technology | |
| CN112327104B (en) | Fault detection and positioning method for power distribution network with distributed power supply | |
| CN109870282A (en) | Method and system for blade vibration feature identification based on compressive sensing | |
| CN113109669A (en) | Power distribution network series-parallel line fault positioning method based on traveling wave characteristic frequency | |
| CN112600659B (en) | Method and system for detecting side channel leakage of security chip based on neural network | |
| Han et al. | Faulted-Phase classification for transmission lines using gradient similarity visualization and cross-domain adaption-based convolutional neural network | |
| CN111122162A (en) | Industrial system fault detection method based on Euclidean distance multi-scale fuzzy sample entropy | |
| CN115876473A (en) | Bearing fault diagnosis method based on PWVD and DenseNet | |
| CN113850161A (en) | Flywheel fault identification method based on LSTM deep noise reduction self-encoder | |
| CN114487695A (en) | Cable hybrid direct current line fault location method and system based on single-end and double-end location | |
| CN116821703A (en) | Intelligent comparison method of fault recording data based on fast dynamic time warping algorithm | |
| CN119335307A (en) | Transmission line fault location method based on improved YOLOv8 model and two-terminal TWM | |
| CN113125886A (en) | Positioning method for electric energy quality disturbance source | |
| CN114779009A (en) | Fault traveling wave detection method based on mode decomposition and symmetric differential energy operator | |
| Song et al. | Research on rolling bearing fault diagnosis method based on improved LMD and CMWPE | |
| CN114325245A (en) | Transmission line fault line selection and location method based on deep learning of traveling wave data | |
| CN119444666A (en) | Transmission line defect hidden danger identification method, device, electronic equipment and storage medium | |
| CN117235465B (en) | Transformer fault type diagnosis method based on graph neural network wave recording analysis | |
| CN115371565B (en) | Visual measurement method and system for axis locus vibration displacement of rotating body | |
| CN116930676A (en) | Fault location methods, devices and equipment based on energy operators and sample entropy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |