CN114778167A - Seeding quality acquisition method, system, electronic device and computer-readable storage medium - Google Patents
Seeding quality acquisition method, system, electronic device and computer-readable storage mediumDownload PDFInfo
- Publication number
- CN114778167A CN114778167ACN202210534023.5ACN202210534023ACN114778167ACN 114778167 ACN114778167 ACN 114778167ACN 202210534023 ACN202210534023 ACN 202210534023ACN 114778167 ACN114778167 ACN 114778167A
- Authority
- CN
- China
- Prior art keywords
- seeding
- picture
- frame
- seed
- quality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M99/00—Subject matter not provided for in other groups of this subclass
- G01M99/005—Testing of complete machines, e.g. washing-machines or mobile phones
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M99/00—Subject matter not provided for in other groups of this subclass
- G01M99/008—Subject matter not provided for in other groups of this subclass by doing functionality tests
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Sowing (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及数据处理技术领域,具体而言,涉及一种播种质量获取方法、 系统、电子设备及计算机可读存储介质。The present invention relates to the technical field of data processing, and in particular, to a method, system, electronic device and computer-readable storage medium for acquiring seeding quality.
背景技术Background technique
随着智慧农业技术的发展,播种机在农业中的应用也日趋成熟,越来越 多的农业场景使用播种机进行播种,播种机作业减少了人力成本,提高了播 种效率。With the development of smart agricultural technology, the application of seeders in agriculture is also becoming more and more mature. More and more agricultural scenarios use seeders for seeding. The operation of seeders reduces labor costs and improves sowing efficiency.
然而,播种机也存在不少缺点,播种机在播种过程中,受多种因素影响, 如覆土轮堵转和播种速度过快等因素,导致播种机播种的部分种子不能被 泥土有效覆盖,从而产生不良播种。但是,目前的播种机在进行播种作业时, 难以获知播种质量。However, the planter also has many shortcomings. During the planting process, the planter is affected by various factors, such as the blocking of the soil cover wheel and the excessively fast planting speed. produce bad seeding. However, it is difficult to know the seeding quality when the current seeder performs the seeding operation.
发明内容SUMMARY OF THE INVENTION
有鉴于此,本发明的目的在于提供一种播种质量获取方法、系统、电子 设备及计算机可读存储介质,其能够改善现有的播种机在进行播种作业时, 不能对种子的播种质量进行监控,难以获知播种质量的问题。In view of this, the purpose of the present invention is to provide a seeding quality acquisition method, system, electronic device and computer-readable storage medium, which can improve the problem that the existing seeder cannot monitor the seeding quality of seeds during sowing operations. , it is difficult to know the problem of sowing quality.
为了实现上述目的,第一方面,本发明实施例提供一种播种质量获取方 法,采用如下的技术方案。In order to achieve the above purpose, in the first aspect, the embodiments of the present invention provide a method for obtaining seeding quality, which adopts the following technical solutions.
一种播种质量获取方法,所述方法包括:A seeding quality acquisition method, the method comprising:
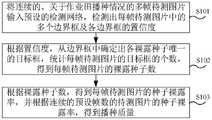
将连续的、关于作业田播种情况的多帧待测图片输入预设的检测网络, 检测出每帧所述待测图片中的多个边界框及各边界框的置信度,所述检测 网络被训练为在以图片为输入的情况下,输出为图片中的边界框及边界框 的置信度,所述边界框表征裸露种子的位置;Input continuous multiple frames of pictures to be tested about the planting conditions of the field into a preset detection network, and detect multiple bounding boxes in each frame of the picture to be tested and the confidence level of each bounding box, and the detection network is determined by The training is that in the case of taking a picture as an input, the output is a bounding box in the picture and the confidence of the bounding box, and the bounding box represents the position of the bare seed;
根据所述置信度,从所述边界框中确定出各所述裸露种子唯一的目标 框,统计每帧所述待测图片的所述目标框的个数,得到每帧所述待测图片的 裸露种子数;According to the confidence, determine the unique target frame of each of the bare seeds from the bounding box, count the number of the target frames of the picture to be tested in each frame, and obtain the target frame of each frame of the picture to be tested. number of bare seeds;
根据所述裸露种子数,得到每帧所述待测图片的种子裸露率,并根据连 续的预设帧数的所述待测图片的种子裸露率,得到播种质量。According to the number of bare seeds, the seed exposure rate of the picture to be tested in each frame is obtained, and the seeding quality is obtained according to the seed exposure rate of the picture to be tested of the continuous preset frame number.
进一步地,所述根据连续的预设帧数的所述待测图片的种子裸露率,得 到播种质量的步骤,包括:Further, described according to the seed exposure rate of the described picture to be tested of the continuous preset frame number, obtain the step of sowing quality, comprising:
若连续的预设帧数的所述待测图片的种子裸露率均大于预设值,则确 定播种质量为欠佳,否则确定播种质量为良好。If the seed exposure rate of the picture to be tested in the continuous preset number of frames is greater than the preset value, it is determined that the seeding quality is not good, otherwise it is determined that the seeding quality is good.
进一步地,在所述得到播种质量的步骤之后,所述方法还包括:Further, after the step of obtaining the seeding quality, the method further includes:
若播种质量为欠佳,则发出预警信号。If the seeding quality is poor, an early warning signal will be issued.
进一步地,所述根据所述置信度,从所述边界框中确定出各所述裸露种 子唯一的目标框的步骤,包括:Further, the step of determining the unique target frame of each of the bare seeds from the bounding box according to the confidence level includes:
将同一裸露种子的所有所述边界框中置信度最大的边界框确定为该裸 露种子的比较框;Determine the bounding box with the highest confidence in all the bounding boxes of the same bare seed as the comparison box of the bare seed;
采用交并比损失函数,依次计算出每个裸露种子的所述比较框与该裸 露种子的剩余所述边界框的交并比值;Using the intersection ratio loss function, calculate the intersection ratio of the comparison box of each bare seed and the remaining bounding boxes of the bare seed in turn;
针对每个裸露种子,将所有所述交并比值与阈值进行比较,若无所述交 并比值大于所述阈值,则将所述比较框的坐标信息作为该裸露种子的目标 坐标信息,并根据所述目标坐标信息确定目标框;For each bare seed, compare all the intersection ratios with the threshold, if none of the intersection ratios is greater than the threshold, the coordinate information of the comparison frame is used as the target coordinate information of the bare seed, and according to The target coordinate information determines a target frame;
否则,将所述比较框剔除,并在该裸露种子的剩余所述边界框中确定出 新的比较框,直至得到该裸露种子的目标坐标信息。Otherwise, the comparison frame is eliminated, and a new comparison frame is determined in the remaining bounding box of the bare seed, until the target coordinate information of the bare seed is obtained.
进一步地,所述根据所述裸露种子数,得到每帧所述待测图片的种子裸 露率的步骤,包括:Further, according to the described number of bare seeds, the step of obtaining the seed exposure rate of the described picture to be tested in every frame, comprises:
根据所述待测图片的作业田覆盖面积,结合播种规格,得到每帧所述待 测图片所涉及的种子总量;According to the field coverage area of the picture to be tested, in conjunction with the sowing specification, obtain the total amount of seeds involved in the picture to be tested in each frame;
根据每帧所述待测图片的种子裸露数以及种子总量,得到每帧所述待 测图片的种子裸露率。According to the number of exposed seeds and the total amount of seeds of the picture to be tested in each frame, the exposed rate of seeds of the picture to be tested in each frame is obtained.
进一步地,所述检测网络包括卷积层、池化层、全连接层和输出层,所 述输出层包括线性激活函数。Further, the detection network includes a convolution layer, a pooling layer, a fully connected layer and an output layer, and the output layer includes a linear activation function.
第二方面,本发明实施例提供一种播种质量获取系统,采用如下的技术 方案。In the second aspect, the embodiments of the present invention provide a seeding quality acquisition system, which adopts the following technical solutions.
一种播种质量获取系统,包括播种机和无人机,所述无人机上搭载有摄 像头,所述播种机与所述无人机通信连接,所述无人机安装有飞控子系统和 算法处理子系统;A seeding quality acquisition system includes a seeding machine and an unmanned aerial vehicle, the unmanned aerial vehicle is equipped with a camera, the seeding machine is connected in communication with the unmanned aerial vehicle, and the unmanned aerial vehicle is installed with a flight control subsystem and an algorithm processing subsystem;
所述播种机,用于根据设置的播种规格对作业田进行播种,并实时生成 飞行跟随信息,将所述飞行跟随信息发送至所述无人机;The sowing machine is used to sow the field according to the set sowing specifications, and generates flight following information in real time, and sends the flight following information to the drone;
所述飞控子系统,用于基于所述飞行跟随信息,利用预设的动态航线生 成算法,控制所述无人机跟随所述播种机飞行;The flight control subsystem is used to control the unmanned aerial vehicle to follow the planter to fly based on the flight following information, using a preset dynamic route generation algorithm;
所述摄像头,用于实时拍摄已播种的所述作业田的待测图片,并将所述 待测图片发送至所述算法处理子系统;The camera is used for real-time shooting of the picture to be tested of the planted field, and the picture to be tested is sent to the algorithm processing subsystem;
所述算法处理子系统,用于根据所述待测图片,采用如第一方案所述的 播种质量获取方法,来获取所述播种机的播种质量。The algorithm processing subsystem is configured to obtain the seeding quality of the seeder by adopting the method for obtaining the seeding quality as described in the first solution according to the picture to be tested.
进一步地,所述播种质量获取系统还包括云平台,所述播种机上安装有 警报子系统,所述云平台与所述播种机通信连接;Further, the seeding quality acquisition system further includes a cloud platform, an alarm subsystem is installed on the seeder, and the cloud platform is connected in communication with the seeder;
所述云平台,用于设置所述播种机的作业规划,并控制所述播种机根据 所述作业规划进行播种作业;The cloud platform is used to set the operation plan of the seeder, and control the seeder to perform the seeding operation according to the operation plan;
所述算法处理子系统,还用于在所述播种质量为欠佳的情况下,向所述 警报子系统发出预警信号;The algorithm processing subsystem is further configured to send an early warning signal to the alarm subsystem when the seeding quality is poor;
所述警报子系统,用于根据所述预警信号向所述云平台发出报警信号, 以促使所述云平台进行报警。The alarm subsystem is configured to send an alarm signal to the cloud platform according to the early warning signal, so as to prompt the cloud platform to issue an alarm.
第三方面,本发明实施例提供一种播种质量获取系统,采用如下的技术 方案。In a third aspect, the embodiments of the present invention provide a seeding quality acquisition system, which adopts the following technical solutions.
一种播种质量获取系统,包括播种机,所述播种机搭载有摄像头和算法 处理子系统,所述摄像头与所述算法处理子系统通信连接;A seeding quality acquisition system, comprising a seeding machine, the seeding machine is equipped with a camera and an algorithm processing subsystem, and the camera is connected in communication with the algorithm processing subsystem;
所述播种机,用于对作业田进行播种;The seeder is used for sowing the field;
所述摄像头,用于实时拍摄已播种的所述作业田的待测图片,并将所述 待测图片发送至所述算法处理子系统;The camera is used for real-time shooting of the picture to be tested of the planted field, and the picture to be tested is sent to the algorithm processing subsystem;
所述算法处理子系统,用于根据所述待测图片,采用如第一方面所述的 播种质量获取方法,来获取所述播种机的播种质量。The algorithm processing subsystem is configured to obtain the seeding quality of the seeder by using the method for obtaining the seeding quality according to the first aspect according to the picture to be tested.
第四方面,本发明实施例提供一种播种质量系统,采用如下的技术方案。In a fourth aspect, the embodiments of the present invention provide a seeding quality system, which adopts the following technical solutions.
一种播种质量获取系统,括通信连接的播种机和无人机,所述播种机上 安装有算法处理子系统,所述无人机上安装有摄像头和飞控子系统;A seeding quality acquisition system, comprising a communication-connected seeder and an unmanned aerial vehicle, an algorithm processing subsystem is installed on the seeder, and a camera and a flight control subsystem are installed on the unmanned aerial vehicle;
所述播种机,用于对作业田进行播种,并实时生成飞行跟随信息,将所 述飞行跟随信息发送至所述无人机;The sowing machine is used to sow the field, generate flight following information in real time, and send the flight following information to the drone;
所述飞控子系统,用于基于所述飞行跟随信息,利用预设的动态航线生 成算法,控制所述无人机跟随所述播种机飞行;The flight control subsystem is used to control the unmanned aerial vehicle to follow the planter to fly based on the flight following information, using a preset dynamic route generation algorithm;
所述摄像头,用于实时拍摄已播种的作业田的待测图片,并将所述待测 图片发送至所述算法处理子系统;The camera is used to capture the picture to be tested of the sown field in real time, and to send the picture to be tested to the algorithm processing subsystem;
所述算法处理子系统,用于根据所述待测图片,采用如第一方面所述的 播种质量获取方法,来获取所述播种机的播种质量。The algorithm processing subsystem is configured to obtain the seeding quality of the seeder by using the method for obtaining the seeding quality according to the first aspect according to the picture to be tested.
第五方面,本发明实施例提供一种电子设备,采用如下的技术方案。In a fifth aspect, an embodiment of the present invention provides an electronic device, which adopts the following technical solutions.
一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处 理器执行的机器可执行指令,所述处理器可执行所述机器可执行指令以实 现如第一方面所述的播种质量获取方法。An electronic device comprising a processor and a memory, the memory storing machine-executable instructions executable by the processor, the processor executing the machine-executable instructions to implement the first aspect Seeding quality acquisition method.
第六方面,本发明实施例提供一种计算机可读存储介质,采用如下的技 术方案。In a sixth aspect, an embodiment of the present invention provides a computer-readable storage medium, which adopts the following technical solutions.
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被 处理器执行时实现如第一方面所述的播种质量获取方法。A computer-readable storage medium on which a computer program is stored, and when the computer program is executed by a processor, implements the method for obtaining seeding quality according to the first aspect.
本发明实施方式提供的播种质量获取方法、系统、电子设备及计算机可 读存储介质,通过对多帧连续的作业区播种情况的待测图片输入检测网络, 得到表征裸露种子位置的边界框,并根据边界框的置信度,确定每个裸露种 子唯一的目标框,根据目标框统计出每帧待测图片中的裸露种子数,并根据 连续的预设帧数的待测图片的种子裸露率,得到播种质量,在播种作业中, 可实时监控,并根据监控的待测图片快速获知播种质量,从而能够改善现有 的播种机在进行播种作业时,不能对种子的播种质量进行监控而难以获知 播种质量的问题。The method, system, electronic device, and computer-readable storage medium for obtaining the seeding quality provided by the embodiments of the present invention obtain the bounding box representing the position of the bare seed by inputting the picture to be tested of the seeding situation of the multi-frame continuous working area into the detection network, and According to the confidence of the bounding box, the unique target frame of each bare seed is determined, the number of bare seeds in each frame of the picture to be tested is counted according to the target frame, and the seed exposure rate of the picture to be tested according to the continuous preset number of frames, The sowing quality can be obtained. During the sowing operation, the sowing quality can be monitored in real time, and the sowing quality can be quickly obtained according to the monitored picture to be tested, so as to improve the existing planter during the sowing operation. sowing quality issues.
附图说明Description of drawings
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中 所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某 些实施方式,因此不应被看作是对范围的限定,对于本领域普通技术人员来 讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附 图。In order to illustrate the technical solutions of the embodiments of the present invention more clearly, the accompanying drawings required in the embodiments will be briefly introduced below. It should be understood that the following drawings only show some embodiments of the present invention, and therefore do not It should be regarded as a limitation of the scope, and for those of ordinary skill in the art, other related drawings can also be obtained according to these drawings without any creative effort.
图1示出了本发明实施例提供的播种质量获取系统的方框示意之一。FIG. 1 shows one schematic block diagram of a seeding quality acquisition system provided by an embodiment of the present invention.
图2示出了本发明实施例提供的播种质量获取方法的流程示意图之一。FIG. 2 shows one of the schematic flowcharts of the method for obtaining seeding quality provided by an embodiment of the present invention.
图3示出了本发明实施例提供的播种质量获取方法的流程示意图之二。FIG. 3 shows the second schematic flowchart of the method for acquiring seeding quality provided by the embodiment of the present invention.
图4示出了图2和图3中步骤S101的部分子步骤的流程示意图。FIG. 4 shows a schematic flowchart of some sub-steps of step S101 in FIG. 2 and FIG. 3 .
图5示出了图2和图3中步骤S102的部分子步骤的流程示意图。FIG. 5 shows a schematic flowchart of some sub-steps of step S102 in FIG. 2 and FIG. 3 .
图6示出了图2和图3中步骤S103的部分子步骤的流程示意图。FIG. 6 shows a schematic flowchart of some sub-steps of step S103 in FIG. 2 and FIG. 3 .
图7示出了本发明实施例提供的播种质量获取系统的结构示意图。FIG. 7 shows a schematic structural diagram of a seeding quality acquisition system provided by an embodiment of the present invention.
图8示出了本发明实施例提供的播种质量获取系统的方框示意图之二。FIG. 8 shows the second schematic block diagram of the seeding quality acquisition system provided by the embodiment of the present invention.
图9示出了本发明实施例提供的播种质量获取系统的工作流程图之一。FIG. 9 shows one of the working flow charts of the seeding quality acquisition system provided by the embodiment of the present invention.
图10示出了本发明实施例提供的播种质量获取系统的工作流程图之二。FIG. 10 shows the second work flow chart of the seeding quality acquisition system provided by the embodiment of the present invention.
图11示出了本发明实施例提供的播种质量获取系统的工作流程图之三。FIG. 11 shows the third work flow chart of the seeding quality acquisition system provided by the embodiment of the present invention.
图12示出了本发明实施例提供的播种质量获取装置的方框示意图。FIG. 12 shows a schematic block diagram of a device for acquiring seeding quality according to an embodiment of the present invention.
图13示出了本发明实施例提供的电子设备的方框示意图。FIG. 13 shows a schematic block diagram of an electronic device provided by an embodiment of the present invention.
图标:100-播种质量获取系统;110-播种机;120-摄像头;130-算法处 理子系统;140-云平台;150-警报子系统;160-无人机;170-拖拉机;180-播 种机构;190-定位子系统;200-无人驾驶子系统;210-无线通讯子系统;220- 云台;240-飞控子系统;250-无线通讯模块;260-播种质量获取装置;270- 检测模块;280-计算模块;290-电子设备。Icons: 100-Sowing quality acquisition system; 110-Sowing machine; 120-Camera; 130-Algorithm processing subsystem; 140-Cloud platform; 150-Alarm subsystem; 160-UAV; 170-Tractor; 180-Sowing mechanism ;190-positioning subsystem;200-unmanned subsystem;210-wireless communication subsystem;220-gimbal;240-flight control subsystem;250-wireless communication module;260-seeding quality acquisition device;270-detection Modules; 280 - Computing Modules; 290 - Electronics.
具体实施方式Detailed ways
下面将结合本发明实施方式中附图,对本发明实施方式中的技术方案 进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施 方式,而不是全部的实施方式。通常在此处附图中描述和示出的本发明实施 方式的组件可以以各种不同的配置来布置和设计。The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. The components of the embodiments of the invention generally described and illustrated in the drawings herein may be arranged and designed in a variety of different configurations.
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在 限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于 本发明的实施方式,本领域技术人员在没有做出创造性劳动的前提下所获 得的所有其他实施方式,都属于本发明保护的范围。Accordingly, the following detailed description of the embodiments of the invention provided in the accompanying drawings is not intended to limit the scope of the invention as claimed, but is merely representative of selected embodiments of the invention. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative work shall fall within the protection scope of the present invention.
需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个 实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些 实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包 含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要 素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列 出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要 素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排 除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。It should be noted that relational terms such as the terms "first" and "second" are only used to distinguish one entity or operation from another entity or operation, and do not necessarily require or imply any relationship between these entities or operations. any such actual relationship or sequence exists. Moreover, the terms "comprising", "comprising" or any other variation thereof are intended to encompass a non-exclusive inclusion such that a process, method, article or device that includes a list of elements includes not only those elements, but also includes not explicitly listed or other elements inherent to such a process, method, article or apparatus. Without further limitation, an element qualified by the phrase "comprising a..." does not preclude the presence of additional identical elements in a process, method, article or apparatus that includes the element.
播种机110在播种过程中,播种质量受多种因素影响,如覆土轮堵转和 播种速度过快等因素都会导致播种的种子不能被泥土有效覆盖,从而容易 出现不良播种时。一旦出现不良播种的情况时,需要使播种机110及时停止 播种,排除故障,以提高播种质量。During the seeding process of the
但目前的播种机110在播种作业时,难以获知播种质量。However, it is difficult to know the seeding quality of the
基于上述考虑,本发明提供一种播种质量获取方案,其能够获取播种质 量,改善目前播种机110不能获知播种质量的问题。以下,将从多个角度, 对播种质量获取方案进行详细介绍。电子设备290Based on the above considerations, the present invention provides a solution for obtaining seeding quality, which can obtain the seeding quality and improve the problem that the current seeding
本发明实施例提供的播种质量获取方法,可以应用于如图1所示的播 种质量获取系统100中,该检测系统包括播种机110,播种机110上搭载有 摄像头120和算法处理子系统130,摄像头120和算法处理子系统130通信 连接。The seeding quality acquisition method provided by the embodiment of the present invention can be applied to the seeding
播种机110,用于对作业田进行播种。The
其中,播种机110可以是无人驾驶播种,即根据预设的播种规格对作业 田进行播种,播种路径预先进行规划。也可以是人工驾驶播种,此时播种路 径由驾驶员决定。Wherein, the
摄像头120,用于实时拍摄已播种的作业田的待测图片,并将待测图片 发送至算法处理子系统130。The
摄像头120可以设置于靠近播种机110的播种部位的位置,以能够对 已播种的作业田进行播种。The
由于待测图片是实时拍摄的,因此待测图片是连续的。Since the pictures to be tested are captured in real time, the pictures to be tested are continuous.
算法处理子系统1301,根据待测图片,采用本发明实施例提供的播种 质量获取方法,来获取播种机110的播种质量。The algorithm processing subsystem 1301 uses the method for obtaining the seeding quality provided by the embodiment of the present invention to obtain the seeding quality of the
上述播种质量获取系统100,及时对已播种的作业田进行拍摄,并根据 拍摄的连续的待测图片,利用播种质量获取方法,得到播种机110的播种质 量,以能在播种过程对播种情况进行监控,把控播种质量,提高播种效率。The above-mentioned sowing
为了及时对异常播种进行处理,请继续参照图1,上述播种质量获取系 统100还可以包括云平台140,播种机110上安装有警报子系统150,云平 台140和播种机110可以通过网络通信连接。In order to deal with abnormal seeding in time, please continue to refer to FIG. 1 , the above-mentioned seeding
算法处理子系统130,还用于在播种质量为欠佳的情况下,向警报子系 统150发出预警信号。The
可以设置一个预设值,当播种质量小于预设值时,播种质量即为欠佳。 也可以根据实际应用情况,对播种质量的判定方式进行适应性调整。本实施 例中,不作具体限定。A preset value can be set, when the seeding quality is less than the preset value, the seeding quality is poor. It is also possible to adapt the way of judging the seeding quality according to the actual application. In this embodiment, no specific limitation is made.
警报子系统150,用于根据预警信号向云平台140发出报警信号,以促 使云平台140进行报警。The
云平台140报警,及时通知运维人员对播种机110进行处理。The
为了及时提醒播种机110上的驾驶员或工作人员,播种机110上还可 以安装有与警报子系统150通信连接的声音发生器和/或信号灯。In order to remind the driver or staff on the
警报子系统150根据预警信号向声音发生器和信号灯发出报警信号, 声音发生器响应于报警信号进行蜂鸣报警,信号灯响应于报警信号进行警 示灯光报警。以能够提醒驾驶员或者工作人员停止播种,对播种机110进行 检修。The
为了更为详细的介绍播种质量获取方法,在一个实施例中,参照图2, 为本发明提供的一种播种质量获取方法的流程示意图之一。本实施方式主 要以该方法应用于图1中的算法处理子系统130来举例说明。在本实施方 式中,该方法可以包括以下步骤。In order to introduce the method for acquiring seeding quality in more detail, in one embodiment, referring to FIG. 2 , it is one of the schematic flowcharts of a method for acquiring seeding quality provided by the present invention. This embodiment is mainly described by taking the method applied to the
S101,将连续的、关于作业田播种情况的多帧待测图片输入预设的检测 网络,检测出每帧待测图片中的多个边界框及各边界框的置信度。S101, the continuous, multiple frames of pictures to be tested about the planting situation of the work field are input into a preset detection network, and a plurality of bounding boxes in each frame of the picture to be tested and the confidence level of each bounding box are detected.
其中,检测网络被训练为在以图片为输入的情况下,输出为图片中的边 界框及边界框的置信度。边界框表征裸露种子的位置,置信度表征边界框为 裸露种子真实边界框的概率。Among them, the detection network is trained to take the picture as the input, and the output is the bounding box in the picture and the confidence of the bounding box. The bounding box represents the position of the bare seed, and the confidence represents the probability that the bounding box is the true bounding box of the bare seed.
具体地,算法处理子系统130将连续的、关于作业田播种情况的多帧 待测图片输入预设的检测网络,检测出每帧待测图片中的多个边界框及各 边界框的置信度,及每帧待测图片上可能有多个边界框。Specifically, the
S102,根据置信度,从边界框中确定出各裸露种子唯一的目标框,统计 每帧待测图片的目标框的个数,得到每帧待测图片的裸露种子数。S102 , according to the confidence, determine the unique target frame of each bare seed from the bounding box, count the number of target frames of each frame of the picture to be tested, and obtain the number of bare seeds of each frame of the picture to be tested.
具体地,针对每一帧待测图片,算法处理子系统130从该帧待测图片 的多个边界框中确定出各裸露种子唯一的目标框,并统计该帧待测图片的 目标框数,得到该帧图片的裸露种子数。对每帧待测图片重复上述步骤,得 到每帧待测图片的裸露种子数。Specifically, for each frame of the picture to be tested, the
S103,根据裸露种子数,得到每帧待测图片的种子裸露率,并根据连续 的预设帧数的待测图片的种子裸露率,得到播种质量。S103, obtain the seed exposure rate of each frame of the picture to be tested according to the number of exposed seeds, and obtain the seeding quality according to the seed exposure rate of the picture to be tested for the continuous preset number of frames.
其中,预设帧数可以为三帧,且由于三帧待测图片是连续拍摄的,因此, 三帧待测图片的拍摄对象大致相同。并且,摄像头120的拍摄的多帧待测 图片的待测范围是相同的,也可以是不同的。The preset number of frames may be three frames, and since the three frames of the pictures to be tested are shot continuously, the shooting objects of the three frames of the pictures to be tested are approximately the same. In addition, the to-be-measured ranges of the multi-frame images to be measured captured by the
具体地,算法处理子系统130根据每帧待测图片中的种子裸露数,得 到每帧待测图片的种子裸露率。并根据连续三帧的待测图片的种子裸露率, 得到播种机110的播种质量。Specifically, the
上述播种质量获取方法中,通过对多帧连续的作业区播种情况的待测 图片输入检测网络,得到表征裸露种子位置的边界框,并根据边界框的置信 度,确定每个裸露种子唯一的目标框,根据目标框统计出每帧待测图片中的 裸露种子数,并根据连续的预设帧数的待测图片的种子裸露率,得到播种质 量,在无人化作业中,可实时监控,并根据监控的待测图片快速获知播种质 量,从而能够改善现有的无人驾驶播种机110在无人化作业中,不能对种子 的播种质量进行监控而难以获知播种质量的问题。In the above method for obtaining seeding quality, a bounding box representing the position of the bare seeds is obtained by inputting the pictures to be tested of the sowing conditions of multiple consecutive frames of the work area into the detection network, and the unique target of each bare seed is determined according to the confidence of the bounding box. According to the target frame, the number of exposed seeds in each frame of the picture to be tested is counted, and the seeding quality is obtained according to the seed exposure rate of the picture to be tested for a continuous preset number of frames. And the sowing quality can be quickly obtained according to the monitored picture to be tested, thereby improving the problem that the existing
在上述基础上,参照图3,本发明提供的播种质量获取方法还包括步骤 S104。On the basis of the above, referring to FIG. 3 , the method for obtaining the seeding quality provided by the present invention further includes step S104.
S104,若播种质量为欠佳,则发出预警信号。S104, if the seeding quality is poor, an early warning signal is issued.
具体地,若算法处理子系统130得到的播种质量为“欠佳”,则出处信号 “1”至警报子系统150。Specifically, if the seeding quality obtained by the
在分析出播种质量欠佳的情况下,算法处理子系统130发送预警信号 至警报子系统150,警报子系统150向云平台140、信号灯及声音发生器等 发出报警信号,云平台140、信号灯及声音发生器立即报警,以提醒控制人 员停止播种机110的工作,并提醒维护人员及时进行检修,从而能够及时排 除故障,提高播种质量。In the case of poor seeding quality, the
进一步地,检测网络包括卷积层、池化层、全连接层、Softmax层和输 出层,输出层包括线性激活函数。通过在输出层加入线性激活函数,增加检 测网络的非线性,提高预测的准确率。Further, the detection network includes a convolution layer, a pooling layer, a fully connected layer, a Softmax layer and an output layer, and the output layer includes a linear activation function. By adding a linear activation function to the output layer, the nonlinearity of the detection network is increased and the prediction accuracy is improved.
在一种实施方式中,通过卷积层提取待测图片的局部特征,通过池化层 提取待测图片的全局特征,通过全连接层综合局部特征和全局特征,得到多 个边界框,通过Softmax层得到每个边界框的置信度,通过输出层输出边界 框和每个边界框的置信度。In one embodiment, the local features of the image to be tested are extracted through the convolution layer, the global features of the image to be tested are extracted through the pooling layer, the local features and the global features are synthesized through the fully connected layer, and multiple bounding boxes are obtained. The layer gets the confidence of each bounding box, and outputs the bounding box and the confidence of each bounding box through the output layer.
为了更好理解步骤S101的处理过程,参照图4,上述步骤S101可以包 括如下步骤。In order to better understand the processing procedure of step S101, referring to Fig. 4 , the above-mentioned step S101 may include the following steps.
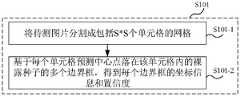
S101-1,将待测图片分割成包括S*S个单元格的网格。S101-1: Divide the picture to be tested into a grid including S*S cells.
S101-2,基于每个单元格预测中心点落在该单元格内的裸露种子的多个 边界框,得到每个边界框的坐标信息和置信度。S101-2, based on each cell predicting multiple bounding boxes of the bare seeds whose center points fall within the cell, and obtaining coordinate information and confidence of each bounding box.
其中,每个边界框可以用4个值来表征,这四个值可以为(x,y,w,h),其 中,(x,y)为边界框的中心坐标,w为边界框的宽,h为边界框的高。(x,y,w,h) 即为坐标信息。置信度用c来表示。实际上,而每个边界框的预测值均包括 五个元素(x,y,w,h,c)。Among them, each bounding box can be represented by 4 values, which can be (x, y, w, h), where (x, y) is the center coordinate of the bounding box, andw is the width of the bounding box , h is the height of the bounding box. (x,y,w,h) is the coordinate information. The confidence is denoted byc . In fact, the predicted value of each bounding box consists of five elements (x, y, w, h, c).
在此基础上,若待测图片被划分成S*S的网格,每个单元格预测出(B*5+C)个值,那么最终预测值为S*S*(B*5+C)的张量,即作为数组。On this basis, if the image to be tested is divided into S*S grids, and each cell predicts (B*5+C) values, then the final predicted value is S*S*(B*5+C ), that is, as an array.
置信度的计算公式为:
其中,


请参照图5,为上述步骤S102的部分子步骤的流程示意图,通过以下 子步骤能够根据置信度,从边界框中确定出各裸露种子唯一的目标框。Please refer to Fig. 5, which is a schematic flowchart of some sub-steps of the above-mentioned step S102. The following sub-steps can determine the unique target frame of each bare seed from the bounding box according to the confidence.
S102-1,将同一裸露种子的所有边界框中置信度最大的边界框确定为该 裸露种子的比较框。S102-1: Determine the bounding box with the highest confidence in all bounding boxes of the same bare seed as the comparison box of the bare seed.
具体地,算法处理子系统130针对每一帧待测图片,将待测图片中同 一裸露种子的所有边界框中置信度最大的边界框确定为该裸露种子的比较 框。Specifically, the
例如,一帧待测图片中若有8颗裸露种子,则有8个比较框。For example, if there are 8 bare seeds in a frame to be tested, there are 8 comparison boxes.
S102-2,采用交并比损失函数,依次计算出每个裸露种子的比较框与该 裸露种子的剩余边界框的交并比值。S102-2, using the intersection ratio loss function, sequentially calculate the intersection ratio between the comparison box of each bare seed and the remaining bounding box of the bare seed.
具体地,算法处理子系统130针对每一颗裸露种子的边界框,计算出 该裸露种子的比较框与该裸露种子的剩余每个边界框之间的交并比,得到 多个交并比值。Specifically, the
例如,一帧待测图片上共有8颗裸露种子,每颗裸露种子有8个边界 框,除去比较框后剩余7个边界框,则每颗裸露种子会计算出7个交并比 值。For example, there are 8 bare seeds in a frame to be tested, and each bare seed has 8 bounding boxes. After removing the comparison box, there are 7 bounding boxes, and then each bare seed will calculate 7 intersection ratios.
S102-3,针对每个裸露种子,将所有交并比值与阈值进行比较。S102-3, for each bare seed, compare all the intersection ratios with a threshold.
若无所述交并比值大于阈值,则执行步骤S102-4,否则执行步骤S102- 5,并在S102-5之后重复步骤S102-1至S102-3,直至得到裸露种子的目标 坐标信息。If none of the intersection ratios are greater than the threshold, step S102-4 is performed, otherwise step S102-5 is performed, and steps S102-1 to S102-3 are repeated after S102-5, until the target coordinate information of the bare seed is obtained.
其中,交并比值大于阈值意味着该边界框和比较框的重合度过高。Where the intersection ratio is greater than the threshold, it means that the overlap between the bounding box and the comparison box is too high.
S102-4,将比较框的坐标信息作为该裸露种子的目标坐标信息,并根据 目标坐标信息确定目标框。S102-4, take the coordinate information of the comparison frame as the target coordinate information of the bare seed, and determine the target frame according to the target coordinate information.
其中,目标坐标信息即为目标框的中心坐标以及长和宽,根据中心坐标 以及长和宽能够快速得到目标框的四个角坐标,从而可以确定目标框的位 置及范围。Among them, the target coordinate information is the center coordinate, length and width of the target frame. According to the center coordinate, length and width, the four corner coordinates of the target frame can be quickly obtained, so that the position and range of the target frame can be determined.
S102-5,将比较框剔除。S102-5, remove the comparison frame.
将比较框剔除后,保留比较框,减小重合度。After the comparison frame is removed, the comparison frame is retained to reduce the degree of coincidence.
在上述S102-1至S102-5中,将重合度高的边界框剔除掉一个,并最终 得到唯一的目标框,能够提高目标框的准确度。In the above S102-1 to S102-5, one bounding box with a high degree of coincidence is removed, and finally a unique target frame is obtained, which can improve the accuracy of the target frame.
应当理解的是,由于目标坐标信息为比较框的坐标信息,因此,目标坐 标信息也为(x,y,w,h)。It should be understood that since the target coordinate information is the coordinate information of the comparison frame, the target coordinate information is also (x, y, w, h).
为了更详细地介绍得到种子裸露率,在一种实施方式中,请参照图6, 可以通过以下步骤实现S103中的根据裸露种子数,得到每帧待测图片的种 子裸露率。In order to introduce the obtained seed exposure rate in more detail, in an embodiment, referring to FIG. 6 , the following steps can be used to obtain the seed exposure rate of each frame of the picture to be tested according to the number of exposed seeds in S103.
S103-1,根据待测图片的作业田覆盖面积,结合播种规格,得到每帧所 述待测图片所涉及的种子总量。S103-1, according to the field coverage area of the picture to be tested, combined with the sowing specification, obtain the total amount of seeds involved in each frame of the picture to be tested.
其中,待测图片的作业田覆盖面积,可经过图片处理得到,也可以为摄 像头120预设的拍摄面积,播种规格为预设的,结合作业田覆盖面积和播 种规格,即可得到待测图片所涉及的种子总量。Among them, the field coverage area of the picture to be tested can be obtained through image processing, or it can be a preset shooting area of the
S103-2,根据每帧待测图片的种子裸露数以及种子总量,得到每帧待测 图片的种子裸露率。S103-2, according to the number of seeds exposed in each frame of the image to be tested and the total amount of seeds, obtain the exposed rate of seeds of each frame of the image to be tested.
将种子裸露数除以种子总量,即可得到每帧待测图片的种子裸露率。Divide the number of seeds exposed by the total number of seeds to obtain the seed exposure rate of each frame of the image to be tested.
通过上述S103-1至S103-2可以快速得到每帧待测图片的种子裸露率。Through the above S103-1 to S103-2, the seed exposure rate of each frame of the picture to be tested can be quickly obtained.
应当理解的是,上述S103-1至S103-2的方法只是其中一种方式的举 例,而非唯一限定。在实际应用中,可以根据实际情况进行适应性的调整。It should be understood that the above-mentioned methods of S103-1 to S103-2 are only examples of one of the methods, and not the only limitation. In practical applications, adaptive adjustments can be made according to the actual situation.
为了便于更为清楚地理解如何得到播种质量,在一种实施方式中,可以 通过以下方式,实现S103中的根据连续的预设帧数的待测图片的种子裸露 率,得到播种质量:若连续的预设帧数的待测图片的种子裸露率均大于预设 值,则确定播种质量为欠佳,否则确定播种质量为良好。In order to facilitate a clearer understanding of how to obtain the seeding quality, in one embodiment, the seed exposure rate of the picture to be tested according to the continuous preset number of frames in S103 can be achieved in the following manner, and the seeding quality can be obtained: If the seed exposure rate of the pictures to be tested with the preset number of frames is greater than the preset value, the seeding quality is determined to be poor; otherwise, the seeding quality is determined to be good.
上述判定播种质量的方法只是一种举例,而非唯一限定。在实际应用中, 可以根据实际需求进行适应性调整,例如,需要考虑播种面积的时候,可以 根据种子裸露率和播种面积的比值来确定播种质量。The above-mentioned method for judging the seeding quality is just an example, not the only limitation. In practical applications, adaptive adjustments can be made according to actual needs. For example, when the sowing area needs to be considered, the sowing quality can be determined according to the ratio of the seed exposure rate to the sowing area.
应该理解的是,虽然图2-图6的流程图中的各个步骤按照箭头的指示 依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本 文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以 以其它的顺序执行。而且,图2-图6中的至少一部分步骤可以包括多个子 步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成, 而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是 依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一 部分轮流或者交替地执行。It should be understood that although the various steps in the flowcharts of Figs. 2-6 are shown in sequence according to the arrows, these steps are not necessarily executed sequentially in the order indicated by the arrows. Unless explicitly stated herein, the execution of these steps is not strictly limited in order, and these steps may be performed in other orders. Moreover, at least a part of the steps in FIG. 2 to FIG. 6 may include multiple sub-steps or multiple stages, and these sub-steps or stages are not necessarily executed and completed at the same time, but may be executed at different times. These sub-steps or The order of execution of the stages is also not necessarily sequential, but may be performed alternately or alternately with other steps or sub-steps of other steps or at least a portion of a stage.
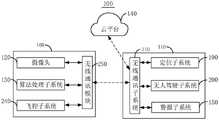
基于上述播种质量获取方法的构思,在一个实施例中,请参照图7和 图8,本申请还提供一种播种质量获取系统100。该播种质量获取系统100 包括播种机110和无人机160,无人机160上搭载有摄像头120,播种机110 和无人机160通信连接,无人机160上安装有飞控子系统240和算法处理 子系统130。Based on the concept of the above method for obtaining seeding quality, in one embodiment, please refer to FIG. 7 and FIG. 8 , the present application further provides a
播种机110,用于对作业田进行播种,并实时生成飞行跟随信息,将飞 行跟随信息发送至无人机160。The
与上述图1中提供的播种质量获取系统100相同,播种机110可以是 无人驾驶,也可以是人工驾驶。无人驾驶时,播种机110根据预设的播种规 格对作业田进行播种,播种路径可以由播种导航算法得到。Like the seeding
飞控子系统240,用于基于飞行跟随信息,利用预设的动态航线生成算 法,控制无人机160跟随播种机110飞行。The
其中,飞行跟随信息包括位置信息、姿态信息、飞行速度信息、飞行高 度信息和跟随距离。Among them, the flight following information includes position information, attitude information, flight speed information, flight height information and following distance.
摄像头120,用于实时拍摄已播种的作业田的待测图片,并将待测图片 发送至算法处理子系统130。The
算法处理子系统130,用于根据待测图片,采用播种质量获取方法,来 获取播种机110的播种质量。The
更为详细地,播种机110可以包括拖拉机170、播种机构180、定位子 系统190、无人驾驶子系统200和无线通讯子系统210。拖拉机170用于提 供动力,播种机110用于种子的自动播种,定位子系统190用于给播种机 110提供准确的位置坐标和姿态角度,无人驾驶子系统200用于控制播种机 110的自动行驶控制,无线通讯子系统210用于与无人机160通讯以进行信 息传输。In more detail,
其中,定位子系统190可以包括GPS-RTK卫星定位接收机和惯性测量 单元。Among them, the
无人机160包括无线通讯模块250,无线通讯模块250用于与播种机 110进行数据通讯。The
请继续参照图1和图2,无人机160还包括云台220,云台220用于安 装并稳定摄像头120。Please continue to refer to FIG. 1 and FIG. 2 , the
与上述图1中的播种质量获取系统100相似,请继续参照图7和图8, 播种质量获取系统100还包括云平台140,播种机110上还安装有警报子系 统150、信号灯和声音发生器,云平台140与播种机110通过无线通讯子系 统210通讯连接,以进行信息传输。Similar to the seeding
云平台140,用于设置播种机110的作业规划,并控制播种机110根据 作业规划进行播种作业。The
更为详细地,无人驾驶子系统200根据云平台140根据作业规划发出 的各项作业指令,控制播种机110的自动行驶控制,云平台140根据作业 规划控制播种机构180的播种作业。In more detail, the
算法处理子系统130,还用于在播种质量为欠佳的情况下,向警报子系 统150发出预警信息。The
例如,播种质量为欠佳时,算法处理子系统130向警报子系统150输 出信号“1”,否则不输出或输出为“0”。For example, when the seeding quality is poor, the
警报子系统150,用于根据预警信号向云平台140、声音发生器以及信 号灯发出报警信号,以促使云平台140、声音发生器和信号灯进行报警。The
更为详细地,警报子系统150接收到算法处理子系统130输出的信号 “1”,则向云平台140、声音发生器以及信号灯发出报警命令,云平台140开 始报警,声音发生器发出报警声音,信号灯闪烁报警。In more detail, the
上述播种质量获取系统100中,播种机110进行播种作业时,通过无 线通讯子系统210不断向无人机160发送飞行跟随信息,无人机160上的 飞控子系统240接收到飞行跟随信息后,通过动态航线生成算法,控制无 人机160按预设距离跟随播种机110飞行。无人机160上的摄像头120实 时拍摄播种机110已播种过的作业田的待测图片,算法处理子系统130对 待测图片进行处理,得到播种机110的播种质量,并根据播种质量发出预 警,从而促使云平台140、声音发生器及信号灯进行报警,以提醒播种机110 播种作业暂停。能够极大地能够改善现有的无人驾驶播种机110在无人化 作业中,不能对种子的播种质量进行监控,从而难以获知播种质量的问题。In the above-mentioned seeding
参照图9,为上述播种质量获取系统100的工作流程图。播种开始时, 无人机160根据播种机110发送的飞行跟随信息跟随播种机110飞行,并 根据摄像头120拍摄的待测图片得到种子裸露率,在判断出连续预设帧数 的种子裸露率高于阈值时,发出预警信号,维护人员在接到报警信号后,开 始排查并处理故障,故障解除后继续播种,直至播种完成。Referring to FIG. 9 , it is a working flow chart of the above-mentioned seeding
在其他实施方式中,算法处理子系统130也可以设置于播种机110上。In other embodiments, the
并且,在其他实施方式中,保留算法处理子系统130和摄像头120后, 将无人机160省去,并将摄像头120安装于播种机110远离车头的位置, 且摄像头120的视角正对作业田,摄像头120与算法处理子系统130通信。 同时将算法处理子系统130设置于播种机110上,一样能够实现上述播种 质量获取系统100所实现的功能。Moreover, in other embodiments, after the
此时,参照图10,为播种质量获取系统100中无人机160之后的工作 流程图。播种开始时,摄像头120实时拍摄图片传输至播种机110上的算 法处理子系统130,算法处理子系统130根据摄像头120拍摄的待测图片得 到种子裸露率,在判断出连续预设帧数的种子裸露率高于阈值时,发出预警 信号,维护人员在接到报警信号后,开始排查并处理故障,故障解除后继续 播种,直至播种完成。At this time, referring to FIG. 10 , it is a flow chart of the work after the
此外,也可以在无人机160上增加图像传输模块,在播种机110上增 加图像接收模块,并将算法处理子系统130安装于播种机110上,播种机 110能够承受更大且更重的算法处理子系统130安装,增加运算速度。摄像 头120拍摄的待测图片通过图像传输模块实时发送至播种机110的图像接 收模块。一样能够实现上述播种质量获取系统100所实现的功能。In addition, an image transmission module can also be added to the
参照图11,为无人机160上增加图像传输模块,算法处理子系统130 和图像接收模块位于播种机110上时的工作流程图。播种开始时,无人机 160根据播种机110发送的飞行跟随信息跟随播种机110飞行,并将摄像头 120拍摄的待测图片通过图像传输模块传输到播种机110的图像接收模块。 算法处理模块根据图像接收模块接收的待测图片得到种子裸露率,在判断 出连续预设帧数的种子裸露率高于阈值时,发出预警信号,维护人员在接到报警信号后,开始排查并处理故障,故障解除后继续播种,直至播种完成。Referring to FIG. 11 , an image transmission module is added to the unmanned
基于上述播种质量获取方法的构思,在一个实施例中,还提供一种播种 质量获取系统100,包括播种机110,播种机110搭载有摄像头120和算法 处理子系统130,摄像头120与算法处理子系统130通信连接;Based on the concept of the above method for obtaining seeding quality, in one embodiment, a seeding
播种机110,用于对作业田进行播种。The
摄像头120,用于实时拍摄已播种的所述作业田的待测图片,并将所述 待测图片发送至所述算法处理子系统130。The
算法处理子系统130,用于根据所述待测图片,采用上述实施例提供的 播种质量获取方法,来获取播种机110的播种质量。The
与上一个实施例中的播种质量获取系统100相比,本实施例将摄像头 120安装于播种机110上。关于播种质量获取系统100的其他限定可以参见 上一个实施例中对播种质量获取系统100的限定。在此不再赘述。Compared with the seeding
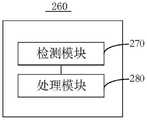
基于上述播种质量获取方法的构思,在一个实施例中,参照图12,提 供一种播种质量获取装置260,包括检测模块270和处理模块021。Based on the concept of the above-mentioned method for obtaining seeding quality, in one embodiment, referring to FIG. 12 , a
检测模块270,用于将连续的、关于作业田播种情况的多帧待测图片输 入预设的检测网络,检测出每帧待测图片中的多个边界框及各边界框的置 信度。The
其中,检测网络被训练为在以图片为输入的情况下,输出为图片中的边 界框及边界框的置信度,边界框表征裸露种子的位置。Among them, the detection network is trained to take the picture as the input, and the output is the bounding box in the picture and the confidence of the bounding box, and the bounding box represents the position of the bare seed.
处理模块021,用于根据置信度,从边界框中确定出各裸露种子唯一的 目标框,统计每帧待测图片的目标框的个数,得到每帧待测图片的裸露种子 数,根据裸露种子数,得到每帧待测图片的种子裸露率,并根据连续的预设 帧数的待测图片的种子裸露率,得到播种质量。上述播种质量获取装置260, 通过已播种的作业田的待测图片,利用检测网络,检测出每帧待测图片的裸 露种子数,并基于每帧待测图片的种子裸露率,得到播种质量,能够改善无 法获取播种机110播种质量的问题。播种质量获取装置260播种质量获取 装置260电子设备290播种质量获取装置260播种质量获取装置260播种 质量获取装置260检测模块270计算模块280检测模块270检测模块270 计算模块280进一步地,播种质量获取装置260还可以包括预警模块。The processing module 021 is used to determine the unique target frame of each bare seed from the bounding box according to the confidence, count the number of target frames of each frame of the picture to be tested, and obtain the number of bare seeds of each frame of the picture to be tested. The number of seeds is used to obtain the seed exposure rate of each frame of the image to be tested, and the seeding quality is obtained according to the seed exposure rate of the image to be tested for a continuous preset number of frames. The above-mentioned sowing
预警模块,用于若播种质量为欠佳,则发出预警信号。The early warning module is used to issue an early warning signal if the seeding quality is poor.
关于播种质量获取装置260的具体限定可以参见上文中对于播种质量 获取方法的限定,在此不再赘述。上述播种质量获取装置260中的各个模 块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式 内嵌于或独立于电子设备290中的处理器中,也可以以软件形式存储于电 子设备290中的存储器中,以便于处理器调用执行以上各个模块对应的操 作。For the specific limitation of the seeding
在一个实施例中,提供了一种计算机设备,该计算机设备的内部结构图 可以如图13所示。该电子设备290包括通过系统总线连接的处理器、存储 器和网络接口。其中,该电子设备290的处理器用于提供计算和控制能力。 该电子设备290的存储器包括非易失性存储介质、内存储器。该非易失性 存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存 储介质中的操作系统和计算机程序的运行提供环境。该电子设备290的数据库用于存储种子裸露数、种子裸露率和播种质量。该电子设备290的网 络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行 时以实现一种播种质量获取方法。In one embodiment, a computer device is provided, and the internal structure diagram of the computer device can be as shown in FIG. 13 . The
本领域技术人员可以理解,图13中示出的结构,仅仅是与本申请方案 相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设 备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者 组合某些部件,或者具有不同的部件布置。Those skilled in the art can understand that the structure shown in FIG. 13 is only a block diagram of a partial structure related to the solution of the present application, and does not constitute a limitation on the computer equipment to which the solution of the present application is applied. Include more or fewer components than shown in the figures, or combine certain components, or have a different arrangement of components.
在一个实施例中,本申请提供的播种质量获取装置260可以实现为一 种计算机程序的形式,计算机程序可在如图13所示的电子设备290上运行。 电子设备290的存储器中可存储组成该播种质量获取装置260的各个程序 模块,比如,图12所示的检测模块270和计算模块280。各个程序模块构 成的计算机程序使得处理器执行本说明书中描述的本申请各个实施例的播 种质量获取方法中的步骤。In one embodiment, the seeding
例如,图13所示的电子设备290可以通过如图12所示的播种质量获 取装置260中的检测模块270执行步骤S101。电子设备290可通过处理模 块021执行步骤S102-S103。For example, the
在一个实施例中,提供了一种电子设备290,包括存储器和处理器,该 存储器存储有计算机程序,该处理器执行计算机程序时实现以下步骤:将连 续的、关于作业田播种情况的多帧待测图片输入预设的检测网络,检测出每 帧待测图片中的多个边界框及各边界框的置信度,检测网络被训练为在以 图片为输入的情况下,输出为图片中的边界框及边界框的置信度,边界框表 征裸露种子的位置;根据置信度,从边界框中确定出各裸露种子唯一的目标 框,统计每帧待测图片的目标框的个数,得到每帧待测图片的裸露种子数; 根据裸露种子数,得到每帧待测图片的种子裸露率,并根据连续的预设帧数 的待测图片的种子裸露率,得到播种质量。In one embodiment, an
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机 程序,计算机程序被处理器执行时实现以下步骤:将连续的、关于作业田播 种情况的多帧待测图片输入预设的检测网络,检测出每帧待测图片中的多 个边界框及各边界框的置信度,检测网络被训练为在以图片为输入的情况 下,输出为图片中的边界框及边界框的置信度,边界框表征裸露种子的位置; 根据置信度,从边界框中确定出各裸露种子唯一的目标框,统计每帧待测图 片的目标框的个数,得到每帧待测图片的裸露种子数;根据裸露种子数,得 到每帧待测图片的种子裸露率,并根据连续的预设帧数的待测图片的种子 裸露率,得到播种质量。In one embodiment, a computer-readable storage medium is provided, on which a computer program is stored, and when the computer program is executed by a processor, the following steps are implemented: inputting continuous, multiple frames of pictures to be tested about the sowing situation of the work field. The preset detection network detects multiple bounding boxes and the confidence of each bounding box in each frame of the picture to be tested. The detection network is trained to output the bounding box and boundary in the picture when the picture is input. The confidence of the frame, the bounding box represents the position of the bare seeds; according to the confidence, the unique target frame of each bare seed is determined from the bounding box, and the number of target frames of each frame of the picture to be tested is counted to obtain each frame of the picture to be tested. According to the number of bare seeds, the seed exposure rate of each frame of the picture to be tested is obtained, and the seeding quality is obtained according to the seed exposure rate of the picture to be tested for a continuous preset number of frames.
上述对电子设备290和计算机可读存储介质的进一步限定可参见上述 关于播种质量获取方法中的限定,在此不再赘述。For further limitations on the
在本申请所提供的几个实施方式中,应该理解到,所揭露的装置和方法, 也可以通过其它的方式实现。以上所描述的装置实施方式仅仅是示意性的, 例如,附图中的流程图和框图显示了根据本发明的多个实施方式的装置、方 法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程 图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模 块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可 执行指令。也应当注意,在有些作为替换的实现方式中,方框中所标注的功 能也可以以不同于附图中所标注的顺序发生。例如,两个连续的方框实际上 可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功 能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流 程图中的方框的组合,可以用执行规定的功能或动作的专用的基于硬件的 系统来实现,或者可以用专用硬件与计算机指令的组合来实现。In the several embodiments provided in this application, it should be understood that the disclosed apparatus and method may also be implemented in other manners. The apparatus embodiments described above are merely illustrative, eg, the flowcharts and block diagrams in the accompanying drawings illustrate the architecture, functionality and possible implementations of apparatuses, methods and computer program products according to various embodiments of the present invention. operate. In this regard, each block in the flowchart or block diagrams may represent a module, segment, or portion of code that contains one or more functions for implementing the specified logical function(s) executable instructions. It should also be noted that, in some alternative implementations, the functions noted in the block may occur out of the order noted in the figures. For example, two blocks in succession may, in fact, be executed substantially concurrently, or the blocks may sometimes be executed in the reverse order, depending upon the functionality involved. It is also noted that each block of the block diagrams and/or flowchart illustrations, and combinations of blocks in the block diagrams and/or flowchart illustrations, can be implemented in dedicated hardware-based systems that perform the specified functions or actions , or can be implemented in a combination of dedicated hardware and computer instructions.
另外,在本发明各个实施方式中的各功能模块可以集成在一起形成一 个独立的部分,也可以是各个模块单独存在,也可以两个或两个以上模块集 成形成一个独立的部分。In addition, each functional module in each embodiment of the present invention can be integrated together to form an independent part, or each module can exist alone, or two or more modules can be integrated to form an independent part.
所述功能如果以软件功能模块的形式实现并作为独立的产品销售或使 用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明 的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部 分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介 质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器, 或者网络设备等)执行本发明各个实施方式所述方法的全部或部分步骤。而 前述的存储介质包括:U盘、移动硬盘、只读存储器017(ROM,Read-OnlyMemory)、随机存取存储器017(RAM,Random Access Memory)、磁碟或 者光盘等各种可以存储程序代码的介质。The functions, if implemented in the form of software function modules and sold or used as independent products, may be stored in a computer-readable storage medium. Based on this understanding, the technical solution of the present invention can be embodied in the form of a software product in essence, or the part that contributes to the prior art or the part of the technical solution. The computer software product is stored in a storage medium, including Several instructions are used to cause a computer device (which may be a personal computer, a server, or a network device, etc.) to execute all or part of the steps of the methods described in various embodiments of the present invention. The aforementioned storage medium includes: U disk, mobile hard disk, read-only memory 017 (ROM, Read-Only Memory), random access memory 017 (RAM, Random Access Memory), magnetic disk or optical disk and other various storage media that can store program codes medium.
以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于 本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神 和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保 护范围之内。The above descriptions are only preferred embodiments of the present invention, and are not intended to limit the present invention. For those skilled in the art, the present invention may have various modifications and changes. Any modification, equivalent replacement, improvement, etc. made within the spirit and principle of the present invention shall be included within the protection scope of the present invention.
Claims (12)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210534023.5ACN114778167A (en) | 2022-05-17 | 2022-05-17 | Seeding quality acquisition method, system, electronic device and computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210534023.5ACN114778167A (en) | 2022-05-17 | 2022-05-17 | Seeding quality acquisition method, system, electronic device and computer-readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114778167Atrue CN114778167A (en) | 2022-07-22 |
Family
ID=82436228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210534023.5APendingCN114778167A (en) | 2022-05-17 | 2022-05-17 | Seeding quality acquisition method, system, electronic device and computer-readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114778167A (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009023044A2 (en)* | 2007-04-24 | 2009-02-19 | 21 Ct, Inc. | Method and system for fast dense stereoscopic ranging |
| US20160180473A1 (en)* | 2011-05-13 | 2016-06-23 | Hydrobio, Inc. | Systems to prescribe and deliver fertilizer over agricultural fields and related methods |
| CN108470077A (en)* | 2018-05-28 | 2018-08-31 | 广东工业大学 | A kind of video key frame extracting method, system and equipment and storage medium |
| CN108982136A (en)* | 2018-05-23 | 2018-12-11 | 安徽农业大学 | A kind of system and method for seed sowing device performance detection |
| WO2020151172A1 (en)* | 2019-01-23 | 2020-07-30 | 平安科技(深圳)有限公司 | Moving object detection method and apparatus, computer device, and storage medium |
| CN112042325A (en)* | 2020-09-16 | 2020-12-08 | 山东农业大学 | Detection method for missing seeding of three-plug seedling culture of green Chinese onions and reseeding device |
| CN112098275A (en)* | 2020-09-07 | 2020-12-18 | 华南农业大学 | Rapid detection system and method for aerial broadcast operation quality |
| CN113255411A (en)* | 2020-02-13 | 2021-08-13 | 北京百度网讯科技有限公司 | Target detection method and device, electronic equipment and storage medium |
- 2022
- 2022-05-17CNCN202210534023.5Apatent/CN114778167A/enactivePending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009023044A2 (en)* | 2007-04-24 | 2009-02-19 | 21 Ct, Inc. | Method and system for fast dense stereoscopic ranging |
| US20160180473A1 (en)* | 2011-05-13 | 2016-06-23 | Hydrobio, Inc. | Systems to prescribe and deliver fertilizer over agricultural fields and related methods |
| CN108982136A (en)* | 2018-05-23 | 2018-12-11 | 安徽农业大学 | A kind of system and method for seed sowing device performance detection |
| CN108470077A (en)* | 2018-05-28 | 2018-08-31 | 广东工业大学 | A kind of video key frame extracting method, system and equipment and storage medium |
| WO2020151172A1 (en)* | 2019-01-23 | 2020-07-30 | 平安科技(深圳)有限公司 | Moving object detection method and apparatus, computer device, and storage medium |
| CN113255411A (en)* | 2020-02-13 | 2021-08-13 | 北京百度网讯科技有限公司 | Target detection method and device, electronic equipment and storage medium |
| CN112098275A (en)* | 2020-09-07 | 2020-12-18 | 华南农业大学 | Rapid detection system and method for aerial broadcast operation quality |
| CN112042325A (en)* | 2020-09-16 | 2020-12-08 | 山东农业大学 | Detection method for missing seeding of three-plug seedling culture of green Chinese onions and reseeding device |
Non-Patent Citations (2)
| Title |
|---|
| 孙海全 等: "一种花生滴灌覆膜引穴播种施肥一体机的研究", 《农业与技术》, vol. 41, no. 17, 15 September 2021 (2021-09-15), pages 45 - 47* |
| 林宏;靳继红;禹昀;周开来;: "免耕播种机漏播图像采集与传输系统设计――基于Android和4G通信", 农机化研究, no. 05, 1 May 2017 (2017-05-01)* |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3932199A1 (en) | Pesticide spraying control method, apparatus, and device, and storage medium | |
| US20210090263A1 (en) | Method and apparatus for detecting ground point cloud points | |
| US20230306735A1 (en) | Agricultural analysis robotic systems and methods thereof | |
| WO2022094854A1 (en) | Growth monitoring method for crops, and devices and storage medium | |
| CN111516877A (en) | System and method for controlling and adjusting spraying amount of pesticide spraying unit area of helicopter | |
| CN110309933A (en) | Plant planting data measurement method, operation route planning method, device and system | |
| CN109407701B (en) | Method, system and device for controlling operation | |
| CN105204510A (en) | Generation method and device for probability map for accurate positioning | |
| EP4238065A1 (en) | Predicting soil organic carbon content | |
| CN110718137A (en) | Method and device for constructing density distribution map of target object, terminal and mobile device | |
| CN118052963B (en) | Method, medium and system for reducing XR long-time error accumulation | |
| CN118968421A (en) | Agricultural production monitoring system and method based on multi-source data analysis | |
| CN117075042A (en) | Operation safety detection method, system and storage medium for electric power operation site | |
| CN115014358A (en) | Crop tracking method, device, system, control device and storage medium | |
| CN113807128B (en) | Seedling shortage marking method and device, computer equipment and storage medium | |
| CN110765931A (en) | Method and device for detecting straw coverage rate, storage medium and agricultural machine | |
| CN114778167A (en) | Seeding quality acquisition method, system, electronic device and computer-readable storage medium | |
| Roy et al. | Active view planning for counting apples in orchards | |
| JP7321928B2 (en) | Agricultural support system | |
| CN116543309B (en) | A method, system, electronic device and medium for obtaining crop abnormality information | |
| CN113628253A (en) | Method and system for accurately detecting individual health of animal and storage medium | |
| CN118192466A (en) | Intelligent control application method, system and storage medium based on digital twin model | |
| CN113409268B (en) | Method and device for detecting passable area based on monocular camera and storage medium | |
| TWI670689B (en) | Smart farmland patrolling system and method thereof | |
| CN115797764A (en) | Remote sensing big data interpretation method and system applied to farmland non-agronomy monitoring |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |