CN114697858A - Inspection vehicle berth positioning device, method and system - Google Patents
Inspection vehicle berth positioning device, method and systemDownload PDFInfo
- Publication number
- CN114697858A CN114697858ACN202210137210.XACN202210137210ACN114697858ACN 114697858 ACN114697858 ACN 114697858ACN 202210137210 ACN202210137210 ACN 202210137210ACN 114697858 ACN114697858 ACN 114697858A
- Authority
- CN
- China
- Prior art keywords
- berth
- positioning
- parking
- uwb
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007689inspectionMethods0.000titleclaimsabstractdescription31
- 238000000034methodMethods0.000titleclaimsabstractdescription28
- 238000004891communicationMethods0.000claimsabstractdescription17
- 238000012937correctionMethods0.000claimsdescription20
- 230000004927fusionEffects0.000claimsdescription4
- 238000006073displacement reactionMethods0.000description4
- 238000005516engineering processMethods0.000description4
- 238000010586diagramMethods0.000description3
- 238000005259measurementMethods0.000description3
- 230000009286beneficial effectEffects0.000description2
- 238000010276constructionMethods0.000description1
- 230000007812deficiencyEffects0.000description1
Images


Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/14—Receivers specially adapted for specific applications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及停车管理技术领域,更为具体的,涉及一种巡检车泊位定位装置、方法及系统。The invention relates to the technical field of parking management, and more particularly, to a device, method and system for locating a parking space of an inspection vehicle.
背景技术Background technique
目前城市道路路边停车收费方案,有传统人工加手持终端收费、高低位视频桩方案,但各自都有着运营成本高或建设成本高等问题。而巡检车巡检路边泊位停车收费方案则是另一种补充方案,巡检车针对路边临时泊位的停车收费管理,需要准确识别泊位停车并定位泊位位置,匹配到对应的泊位与车辆,将抓拍照片和泊位停车匹配识别结果等数据上传平台进行证据链组合。At present, urban roadside parking charging schemes include traditional manual and handheld terminal charging schemes, and high and low-position video pile schemes, but each has problems of high operating costs or high construction costs. The inspection vehicle inspection on-street parking charging scheme is another supplementary solution. For the parking fee management of temporary roadside parking spaces, the inspection vehicle needs to accurately identify the parking space and locate the parking space to match the corresponding parking space and vehicle. , and upload the data such as snapshot photos and parking parking matching identification results to the platform for evidence chain combination.
因此对泊位的智能识别和定位就非常重要,而目前的卫星定位技术在精度上对泊位的定位还有较大的误差,同一条路线多次定位也会出现水平位移。尤其在面临有高层建筑或遮挡时,信号很差,会产生更大的定位漂移。Therefore, the intelligent identification and positioning of the berth is very important, and the current satellite positioning technology still has a large error in the positioning of the berth in terms of accuracy, and horizontal displacement will also occur in the same route for multiple positioning. Especially in the face of high-rise buildings or occlusion, the signal is very poor, which will cause greater positioning drift.
另外,在没有GNSS定位信号的地方也没有一个可行的完整方案,所以需要一套完整的定位方案来解决巡检车泊位定位中GNSS定位水平位移、定位信号差和无卫星定位信号的情况。In addition, there is no feasible complete solution where there is no GNSS positioning signal, so a complete positioning solution is needed to solve the situation of GNSS positioning horizontal displacement, poor positioning signal and no satellite positioning signal in the parking positioning of inspection vehicles.
发明内容SUMMARY OF THE INVENTION
本发明的目的在于克服现有技术的不足,提供一种巡检车泊位定位装置、方法及系统,扩大了巡检车系统应用场景,提高系统可用性;提高定位的精准度,使泊位定位准确率更高;减少人工的参与度,大大减少了劳动强度,降低运营成本。The purpose of the present invention is to overcome the deficiencies of the prior art, and to provide a berth positioning device, method and system for an inspection vehicle, which expands the application scenarios of the inspection vehicle system, improves the system availability, improves the positioning accuracy, and increases the berth positioning accuracy. Higher; reduce labor participation, greatly reduce labor intensity, and reduce operating costs.
本发明的目的是通过以下方案实现的:The purpose of this invention is to realize through the following scheme:
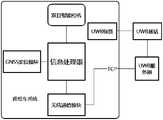
一种巡检车泊位定位装置,包括卫星定位模块、无线通信模块、泊位识别装置、处理器、UWB基站装置、UWB标签和UWB服务器;卫星定位模块、无线通信模块、泊位识别装置均与处理器连接,UWB标签独立集成在装置中,位置数据通过UWB基站装置传到UWB服务器;所述卫星定位模块,用于接收高精度卫星定位信号;所述无线通信模块,用于连接云端服务器;所述泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别。A berth positioning device for inspection vehicles, comprising a satellite positioning module, a wireless communication module, a berth identification device, a processor, a UWB base station device, a UWB tag and a UWB server; the satellite positioning module, the wireless communication module, and the berth identification device are all connected to the processor. connection, the UWB tag is independently integrated in the device, and the location data is transmitted to the UWB server through the UWB base station device; the satellite positioning module is used to receive high-precision satellite positioning signals; the wireless communication module is used to connect to the cloud server; the The parking space recognition device is used for parking space recognition, parking space parking recognition and license plate recognition.
进一步地,包括勘测采集模块,用于对泊位位置信息进行勘测采集,具体包括:泊位位置信息勘测:勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到UWB基站的距离。Further, it includes a survey and collection module for surveying and collecting berth position information, specifically including: berth position information survey: surveying the differential positioning of the starting point of the roadside temporary berth marking the parking lot, the high-precision position coordinates, and the differential positioning of the end point. High-precision location coordinates, differential positioning high-precision location coordinates of each berth, distance from each berth to the starting point, and distance from each berth to the UWB base station.
进一步地,所述卫星定位模块包括GNSS高精定位模块。Further, the satellite positioning module includes a GNSS high-precision positioning module.
进一步地,所述泊位识别装置包括双目相机。Further, the berth identification device includes a binocular camera.
进一步地,所述UWB基站装置安装在路边杆上。Further, the UWB base station device is installed on a roadside pole.
一种基于如上任一项所述巡检车泊位定位装置的方法,包括步骤:A method based on the above-mentioned inspection vehicle parking position device, comprising the steps of:
S1,前期对泊位进行位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束点的位置坐标和每个泊位到停车场开始点的距离信息;S1, carry out location survey on the berths in the early stage, and the survey determines the position coordinates of each berth, the starting point and ending point of the temporary parking lot on the roadside, and the distance information from each berth to the starting point of the parking lot;
S2,巡检车通过控制泊位识别装置识别路边临时停车场的泊位,识别到泊位时获取卫星定位模块的实时位置坐标,并与步骤S1中前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据;S2, the inspection vehicle recognizes the parking space of the temporary roadside parking lot by controlling the parking space identification device, and obtains the real-time position coordinates of the satellite positioning module when the parking space is recognized, and matches the starting point position of the temporary roadside parking lot obtained by the preliminary survey in step S1. Coordinate error calculation to obtain error data;
S3,当巡检车通过泊位识别装置识别到泊位停车时,及时获取卫星定位模块的实时位置坐标,并与步骤S2中开始时得到的误差数据做误差修正,最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。S3, when the patrol vehicle recognizes the parking in the parking space through the parking identification device, the real-time position coordinates of the satellite positioning module are obtained in time, and the error correction is performed with the error data obtained at the beginning in step S2, and finally the corrected position coordinates of the parking in the parking space are obtained, Then match the berth number to the corresponding position coordinates.
进一步地,所述修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正。Further, the correction includes position coordinate correction, measurement distance, and distance correction for real-time positioning from the current actual positioning point to the starting point.
一种基于如上任一项所述巡检车泊位定位装置的方法,包括步骤:通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取卫星定位模块实时定位位置信息并与泊位信息做动态修正;所述泊位信息包括勘测精确数据。A method based on the parking space positioning device of an inspection vehicle as described in any one of the above, comprising the steps of continuously identifying the parking spaces through the parking space identification device, identifying the parking spaces one by one in sequence, and obtaining the real-time positioning position information of the satellite positioning module after the identification is successful, and doing the same with the parking space information. Dynamic correction; the berth information includes survey accurate data.
一种基于如上任一项所述巡检车泊位定位装置的方法,当卫星定位模块没有信号或者信号很差时,包括步骤:前期勘测确定每个泊位到停车场UWB基站的距离信息;巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接UWB服务器及时获取UWB标签距离信息,并与前期勘测确定的UWB基站到泊位距离信息相比较,确定泊位位置信息。A method based on the inspection vehicle parking location device as described in any one of the above, when the satellite positioning module has no signal or the signal is very poor, the method includes the steps of: preliminary survey to determine the distance information from each parking space to the parking lot UWB base station; inspection When the vehicle successfully identifies the parking space on the roadside by controlling the parking identification device, it can obtain the UWB tag distance information in time by connecting to the UWB server, and compare it with the distance information from the UWB base station to the parking space determined by the previous survey to determine the parking space information.
一种融合定位系统,包括如上任一项所述巡检车泊位定位装置。A fusion positioning system, comprising the inspection vehicle parking position positioning device according to any one of the above.
本发明的有益效果包括:The beneficial effects of the present invention include:
1.通过GNSS定位与UWB定位装置结合,可以避免没有GNSS信号的场景,扩大了巡检车系统应用场景,提高系统可用性;1. Through the combination of GNSS positioning and UWB positioning device, the scene without GNSS signal can be avoided, the application scene of the inspection vehicle system is expanded, and the system availability is improved;
2.通过智能相机装置识别泊位,将前期勘测的高精位置对实时GNSS定位数据做误差修正,提高定位的精准度,使泊位定位准确率更高;2. Identify the berth through the smart camera device, and correct the real-time GNSS positioning data with the high-precision position of the previous survey to improve the positioning accuracy and make the berth positioning accuracy rate higher;
3.智能识别泊位停车,减少人工的参与度,大大减少了劳动强度,降低运营成本。3. Intelligently identify parking spaces, reduce manual participation, greatly reduce labor intensity and reduce operating costs.
附图说明Description of drawings
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。In order to explain the embodiments of the present invention or the technical solutions in the prior art more clearly, the following briefly introduces the accompanying drawings that need to be used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description are only These are some embodiments of the present invention, and for those of ordinary skill in the art, other drawings can also be obtained from these drawings without any creative effort.
图1为本发明实施例的巡检车系统连接框图;FIG. 1 is a connection block diagram of an inspection vehicle system according to an embodiment of the present invention;
图2为本发明实施例的泊位勘测图;2 is a berth survey diagram of an embodiment of the present invention;
图3为本发明实施例的泊位定位误差修正图。FIG. 3 is a berth positioning error correction diagram according to an embodiment of the present invention.
具体实施方式Detailed ways
本说明书中所有实施例公开的所有特征,或隐含公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合和/或扩展、替换。All features disclosed in all embodiments in this specification, or steps in all methods or processes disclosed implicitly, except mutually exclusive features and/or steps, may be combined and/or expanded or replaced in any way.
下面根据附图1~图3,对本发明的技术构思、解决的技术问题、工作原理、工作过程和有益效果作进一步详细、充分地说明。The technical concept, the technical problem solved, the working principle, the working process and the beneficial effects of the present invention will be further described in detail and fully below according to the accompanying drawings 1 to 3 .
本发明的目的在于提供一种更完整的巡检车泊位定位装置、方法及系统,旨在解决泊位管理中对泊位进行定位不准的问题,通过本发明装置和方法可以智能检测泊位位置,在卫星定位有水平位移时也能通过位移误差纠正来修复位置以精确定位泊位,匹配泊位停车。The purpose of the present invention is to provide a more complete berth positioning device, method and system for inspection vehicles, aiming to solve the problem of inaccurate positioning of berths in berth management. The device and method of the invention can intelligently detect the berth position, and When the satellite positioning has a horizontal displacement, the position can be corrected by the displacement error correction to accurately locate the parking space and match the parking space.
本发明的目的还在于提供一种融合定位系统,在卫星定位信号非常差或无信号的地方也能准确匹配到泊位,解决没有卫星定位信号无法定位问题。The purpose of the present invention is also to provide a fusion positioning system, which can accurately match the berth even where the satellite positioning signal is very poor or no signal, so as to solve the problem that the positioning cannot be performed without the satellite positioning signal.
如图1所示,本发明实施例提供的装置方案包括GNSS高精定位模块、无线通信模块、泊位识别装置(双目相机)、处理器、智能识别系统、UWB(超宽带无线通信技术是一种无载波通信技术)基站装置(安装在路边杆上)、UWB标签和UWB服务器和一套融合多种定位方式的控制系统。As shown in FIG. 1 , the device solution provided by the embodiment of the present invention includes a GNSS high-precision positioning module, a wireless communication module, a berth identification device (binocular camera), a processor, an intelligent identification system, and UWB (ultra-wideband wireless communication technology is a A carrierless communication technology) base station device (installed on the roadside pole), UWB tag and UWB server and a set of control systems that integrate multiple positioning methods.
如图2所示,前期对泊位位置信息的勘测采集包括:泊位位置信息勘测:前期勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到UWB基站的距离(UWB定位方式)。其中,GNSS高精定位模块,用于接收高精度卫星定位信号;无线通信模块,用于连接云端服务器;泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别;高精卫星定位模块、无线通信模块、泊位识别装置(双目相机)均与处理器连接,UWB标签独立集成在系统装置中,位置数据通过UWB基站传到UWB服务器。As shown in Figure 2, the survey and collection of berth location information in the early stage includes: berth location information survey: preliminary survey of the roadside temporary berth marking the differential positioning high-precision position coordinates of the starting point of the parking lot, and the differential positioning high-precision position coordinates of the end point . The differential positioning high-precision position coordinates of each berth, the distance from each berth to the starting point, and the distance from each berth to the UWB base station (UWB positioning method). Among them, the GNSS high-precision positioning module is used to receive high-precision satellite positioning signals; the wireless communication module is used to connect to the cloud server; the parking space identification device is used for parking space identification, parking identification and license plate recognition; high-precision satellite positioning module, The wireless communication module and the berth identification device (binocular camera) are all connected to the processor, the UWB tag is independently integrated in the system device, and the location data is transmitted to the UWB server through the UWB base station.
如图3所示,本发明实施例提供一种泊位定位方法的技术方案,包括步骤:As shown in FIG. 3 , an embodiment of the present invention provides a technical solution for a berth positioning method, including the steps:
前期对泊位进行高精位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束点的位置坐标和每个泊位到停车场开始点的距离信息;In the early stage, high-precision location survey of berths was carried out, and the survey determined the position coordinates of each berth, the start point and end point of the temporary parking lot on the roadside, and the distance information from each berth to the start point of the parking lot;
巡检车通过控制泊位识别装置识别路边临时停车场的第一个泊位,识别到第一个泊位时获取GNSS高精定位模块实时位置坐标,并与前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据。The inspection vehicle recognizes the first parking space of the temporary roadside parking lot by controlling the parking space recognition device, and obtains the real-time position coordinates of the GNSS high-precision positioning module when the first parking space is recognized, and starts with the temporary roadside parking lot obtained from the previous survey. The point position coordinates are used for error calculation to obtain error data.
当巡检车泊位识别装置识别到泊位停车时,及时获取模块实时位置坐标,与开始时得到的误差数据做误差修正(修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正),最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。When the inspection vehicle parking identification device recognizes that the parking space is parked, it obtains the real-time position coordinates of the module in time, and performs error correction with the error data obtained at the beginning (correction includes position coordinate correction, measurement distance, and real-time positioning from the current actual positioning point to the starting point). Distance correction), and finally get the corrected position coordinates of the parking space, and then match the parking space number to the corresponding position coordinates.
本发明提供的技术方案,也可以通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取GNSS定位模块实时定位位置信息并与泊位信息(勘测精确数据)做动态修正。The technical solution provided by the present invention can also continuously identify the berths through the berth identification device, identify the berths one by one, and obtain the real-time positioning position information of the GNSS positioning module after the identification is successful, and make dynamic corrections with the berth information (accurate survey data).
本发明还提供一种定位的技术方案,当GNSS高精定位模块没有信号或者信号很差时,则使用UWB装置(有安装UWB基站),包括步骤:前期勘测确定每个泊位到停车场UWB基站的距离信息。巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接UWB服务器及时获取UWB标签距离信息,并与前期勘测确定的基站到泊位距离信息相比较,确定泊位位置信息。The present invention also provides a technical solution for positioning. When the GNSS high-precision positioning module has no signal or the signal is very poor, a UWB device (with a UWB base station installed) is used, including the steps of: preliminary survey to determine each berth to the parking lot UWB base station distance information. By controlling the parking space identification device, the inspection vehicle successfully recognizes the parking in the roadside parking space, obtains the UWB tag distance information in time by connecting to the UWB server, and compares it with the distance information from the base station to the parking space determined by the previous survey to determine the parking space information.
通过智能识别泊位获取前期勘测的精准泊位位置数据与实时获取的定位数据做误差修正,提高精准度,提升泊位定位匹配率;通过GNSS定位与UWB定位场景互补,融合定位泊位方案。Through intelligent identification of berths, the accurate berth position data obtained in the previous survey and the real-time positioning data are corrected for errors, so as to improve the accuracy and the matching rate of berth positioning; through the complementation of GNSS positioning and UWB positioning scenarios, the positioning berth scheme is integrated.
实施例1:一种巡检车泊位定位装置,包括卫星定位模块、无线通信模块、泊位识别装置、处理器、UWB基站装置、UWB标签和UWB服务器;卫星定位模块、无线通信模块、泊位识别装置均与处理器连接,UWB标签独立集成在装置中,位置数据通过UWB基站装置传到UWB服务器;所述卫星定位模块,用于接收高精度卫星定位信号;所述无线通信模块,用于连接云端服务器;所述泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别。Embodiment 1: An inspection vehicle parking location device, including a satellite location module, a wireless communication module, a parking location identification device, a processor, a UWB base station device, a UWB tag and a UWB server; a satellite location module, a wireless communication module, and a parking space identification device. Both are connected to the processor, the UWB tag is independently integrated in the device, and the location data is transmitted to the UWB server through the UWB base station device; the satellite positioning module is used to receive high-precision satellite positioning signals; the wireless communication module is used to connect to the cloud The server; the parking space identification device is used for parking space identification, parking identification and license plate identification.
实施例2:在实施例1的基础上,包括勘测采集模块,用于对泊位位置信息进行勘测采集,具体包括:泊位位置信息勘测:勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到UWB基站的距离。Embodiment 2: On the basis of Embodiment 1, a survey and collection module is included, which is used to survey and collect berth position information, specifically including: berth position information survey: surveying the differential positioning height of the starting point of the roadside temporary berth marking parking lot; The precise position coordinates, the differential positioning high-precision position coordinates of the end point, the differential positioning high-precision position coordinates of each berth, the distance from each berth to the starting point, and the distance from each berth to the UWB base station.
可选的实施方式,所述卫星定位模块包括GNSS高精定位模块。In an optional embodiment, the satellite positioning module includes a GNSS high-precision positioning module.
可选的实施方式,所述泊位识别装置包括双目相机。In an optional embodiment, the berth identification device includes a binocular camera.
可选的实施方式,所述UWB基站装置安装在路边杆上。In an optional implementation manner, the UWB base station device is installed on a roadside pole.
实施例3:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,包括步骤:Embodiment 3: A method for inspecting a parking space positioning device for an inspection vehicle as described in any of the above embodiments, comprising the steps of:
S1,前期对泊位进行位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束点的位置坐标和每个泊位到停车场开始点的距离信息;S1, carry out location survey on the berths in the early stage, and the survey determines the position coordinates of each berth, the starting point and ending point of the temporary parking lot on the roadside, and the distance information from each berth to the starting point of the parking lot;
S2,巡检车通过控制泊位识别装置识别路边临时停车场的泊位,识别到泊位时获取卫星定位模块的实时位置坐标,并与步骤S1中前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据;S2, the inspection vehicle recognizes the parking space of the temporary roadside parking lot by controlling the parking space identification device, and obtains the real-time position coordinates of the satellite positioning module when the parking space is recognized, and matches the starting point position of the temporary roadside parking lot obtained by the preliminary survey in step S1. Coordinate error calculation to obtain error data;
S3,当巡检车通过泊位识别装置识别到泊位停车时,及时获取卫星定位模块的实时位置坐标,并与步骤S2中开始时得到的误差数据做误差修正,最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。S3, when the patrol vehicle recognizes the parking in the parking space through the parking identification device, the real-time position coordinates of the satellite positioning module are obtained in time, and the error correction is performed with the error data obtained at the beginning in step S2, and finally the corrected position coordinates of the parking in the parking space are obtained, Then match the berth number to the corresponding position coordinates.
实施例4:在实施例3的基础上,所述修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正。Embodiment 4: On the basis of
实施例5:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,包括步骤:通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取卫星定位模块实时定位位置信息并与泊位信息做动态修正;所述泊位信息包括勘测精确数据。Embodiment 5: A method based on the inspection vehicle parking space positioning device as described in any one of the above embodiments, comprising the steps of: continuously identifying the parking spaces through the parking space identification device, identifying the parking spaces one by one, and obtaining the real-time positioning of the satellite positioning module after the identification is successful. The position information is dynamically corrected with the berth information; the berth information includes survey accurate data.
实施例6:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,当卫星定位模块没有信号或者信号很差时,包括步骤:前期勘测确定每个泊位到停车场UWB基站的距离信息;巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接UWB服务器及时获取UWB标签距离信息,并与前期勘测确定的UWB基站到泊位距离信息相比较,确定泊位位置信息。Embodiment 6: A method based on the inspection vehicle parking space positioning device as described in any of the above embodiments, when the satellite positioning module has no signal or the signal is very poor, the method includes the steps of: a preliminary survey to determine each parking space to the parking lot UWB The distance information of the base station; when the inspection vehicle successfully identifies the roadside parking space by controlling the parking space identification device, it obtains the UWB tag distance information in time by connecting to the UWB server, and compares it with the distance information from the UWB base station to the parking space determined in the previous survey to determine the parking space location information.
实施例7:一种融合定位系统,包括如上任一项实施例中所述巡检车泊位定位装置。Embodiment 7: A fusion positioning system, comprising the inspection vehicle parking space positioning device as described in any one of the preceding embodiments.
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。The parts not involved in the present invention are the same as the prior art or can be implemented by using the prior art.
上述技术方案只是本发明的一种实施方式,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施方式所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。The above technical solution is only an embodiment of the present invention. For those skilled in the art, on the basis of the application methods and principles disclosed in the present invention, it is easy to make various types of improvements or deformations, not limited to The methods described in the above-mentioned specific embodiments of the present invention, therefore, the above-described methods are only preferred, and have no restrictive meaning.
除以上实例以外,本领域技术人员根据上述公开内容获得启示或利用相关领域的知识或技术进行改动获得其他实施例,各个实施例的特征可以互换或替换,本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。In addition to the above examples, those skilled in the art can obtain enlightenment from the above disclosure or use knowledge or technology in related fields to make changes to obtain other embodiments, the features of each embodiment can be interchanged or replaced, and the changes and changes made by those skilled in the art Without departing from the spirit and scope of the present invention, all should fall within the protection scope of the appended claims of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210137210.XACN114697858A (en) | 2022-02-15 | 2022-02-15 | Inspection vehicle berth positioning device, method and system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210137210.XACN114697858A (en) | 2022-02-15 | 2022-02-15 | Inspection vehicle berth positioning device, method and system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114697858Atrue CN114697858A (en) | 2022-07-01 |
Family
ID=82136686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210137210.XAPendingCN114697858A (en) | 2022-02-15 | 2022-02-15 | Inspection vehicle berth positioning device, method and system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114697858A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115327598A (en)* | 2022-08-09 | 2022-11-11 | 深圳市方格尔科技有限公司 | Video inspection equipment positioning method and charging method for roadside parking charging |
| CN115830839A (en)* | 2023-02-22 | 2023-03-21 | 深圳云游四海信息科技有限公司 | Method and system for correcting positioning deviation of in-road inspection vehicle |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012221347A (en)* | 2011-04-12 | 2012-11-12 | Mitsubishi Electric Corp | Parking position management system and parking position management method |
| WO2016165151A1 (en)* | 2015-04-14 | 2016-10-20 | 深圳市润安科技发展有限公司 | Roadside parking management method and system |
| CN106990778A (en)* | 2017-03-21 | 2017-07-28 | 深圳市金溢科技股份有限公司 | A kind of parking lot automatic Pilot base station, label, server, system and method |
| CN108877280A (en)* | 2018-06-05 | 2018-11-23 | 浙江志诚软件有限公司 | Parking data acquires equipment, management system and mobile parking data acquisition equipment |
| CN109767626A (en)* | 2018-12-20 | 2019-05-17 | 北京筑梦园科技有限公司 | A kind of curb parking method for inspecting, system, cruiser and server |
| CN111275978A (en)* | 2019-12-23 | 2020-06-12 | 江西山水光电科技股份有限公司 | Roadside parking vehicle real-time acquisition management system and management method |
| CN111856394A (en)* | 2020-07-24 | 2020-10-30 | 山东协和学院 | A precise positioning device and method based on the combination of UWB and monitoring |
| CN113419264A (en)* | 2021-06-11 | 2021-09-21 | 杭州电子科技大学 | High-precision indoor and outdoor positioning system and indoor and outdoor positioning and transition method |
- 2022
- 2022-02-15CNCN202210137210.XApatent/CN114697858A/enactivePending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012221347A (en)* | 2011-04-12 | 2012-11-12 | Mitsubishi Electric Corp | Parking position management system and parking position management method |
| WO2016165151A1 (en)* | 2015-04-14 | 2016-10-20 | 深圳市润安科技发展有限公司 | Roadside parking management method and system |
| CN106990778A (en)* | 2017-03-21 | 2017-07-28 | 深圳市金溢科技股份有限公司 | A kind of parking lot automatic Pilot base station, label, server, system and method |
| CN108877280A (en)* | 2018-06-05 | 2018-11-23 | 浙江志诚软件有限公司 | Parking data acquires equipment, management system and mobile parking data acquisition equipment |
| CN109767626A (en)* | 2018-12-20 | 2019-05-17 | 北京筑梦园科技有限公司 | A kind of curb parking method for inspecting, system, cruiser and server |
| CN111275978A (en)* | 2019-12-23 | 2020-06-12 | 江西山水光电科技股份有限公司 | Roadside parking vehicle real-time acquisition management system and management method |
| CN111856394A (en)* | 2020-07-24 | 2020-10-30 | 山东协和学院 | A precise positioning device and method based on the combination of UWB and monitoring |
| CN113419264A (en)* | 2021-06-11 | 2021-09-21 | 杭州电子科技大学 | High-precision indoor and outdoor positioning system and indoor and outdoor positioning and transition method |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115327598A (en)* | 2022-08-09 | 2022-11-11 | 深圳市方格尔科技有限公司 | Video inspection equipment positioning method and charging method for roadside parking charging |
| CN115830839A (en)* | 2023-02-22 | 2023-03-21 | 深圳云游四海信息科技有限公司 | Method and system for correcting positioning deviation of in-road inspection vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107704821B (en) | A method for calculating vehicle pose and attitude in a curve | |
| CN107643086B (en) | A vehicle positioning method, device and system | |
| CN107664500B (en) | Garage Vehicle Positioning and Navigation Method Based on Image Feature Recognition | |
| CN108845343A (en) | The vehicle positioning method that a kind of view-based access control model, GPS are merged with high-precision map | |
| CN108827292A (en) | The accurate method for locating speed measurement of combined navigation and system based on GNSS and ground base station | |
| CN114697858A (en) | Inspection vehicle berth positioning device, method and system | |
| CN102032910B (en) | Real-time self-investigation new path generating method of vehicle-mounted navigation map | |
| WO2019086000A1 (en) | Positioning method and device, and server and system | |
| CN114114367B (en) | AGV outdoor positioning switching method, computer device and program product | |
| CN105807296A (en) | Vehicle positioning method and device and vehicle positioning equipment | |
| CN114360093B (en) | Road side parking space inspection method based on Beidou RTK, SLAM positioning and image analysis | |
| CN106931976A (en) | A kind of method and device of navigation information updating | |
| CN111267912A (en) | Train positioning method and system based on multi-source information fusion | |
| CN111927557A (en) | Automatic measuring method and network system for measuring robot of mine fully mechanized coal mining face | |
| CN117793148A (en) | Trusted preset road network matching method, device, equipment and storage medium | |
| CN113627273B (en) | Expressway mileage stake mark positioning method based on vision | |
| CN114910085B (en) | A vehicle fusion positioning method and device based on road administration facility recognition | |
| CN115424468A (en) | Parking stall detecting system based on many cameras fuse | |
| CN113484843A (en) | Method and device for determining external parameters between laser radar and integrated navigation | |
| CN103606321A (en) | Driving-test judgment method based on technology combining video positioning and digital modeling | |
| CN117420587A (en) | Ground penetrating radar fusion positioning method and system | |
| CN115083203A (en) | Method and system for inspecting parking in road based on image recognition berth | |
| CN106056953B (en) | The method that traffic route information is obtained based on low precision gps data | |
| CN113340313B (en) | Method and device for determining navigation map parameters | |
| JP3617249B2 (en) | Digital image capturing device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |