CN114661037A - Automatic regression system and self-moving equipment - Google Patents
Automatic regression system and self-moving equipmentDownload PDFInfo
- Publication number
- CN114661037A CN114661037ACN202011514815.3ACN202011514815ACN114661037ACN 114661037 ACN114661037 ACN 114661037ACN 202011514815 ACN202011514815 ACN 202011514815ACN 114661037 ACN114661037 ACN 114661037A
- Authority
- CN
- China
- Prior art keywords
- identification
- boundary
- self
- return direction
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请涉及一种自移动设备的自动回归系统和自移动设备,属于自动控制技术领域。The application relates to an automatic regression system of a self-moving device and a self-moving device, and belongs to the technical field of automatic control.
背景技术Background technique
自移动设备是指无需人工操作,可以实现自动移动的设备。比如:智能割草机、扫地机器人等。自移动设备在工作结束或者电量不足的情况下,需要回归充电设备(比如:充电桩、充电基座等)进行充电。Self-moving equipment refers to equipment that can move automatically without manual operation. For example: smart lawn mowers, sweeping robots, etc. The self-mobile device needs to return to the charging device (such as charging pile, charging base, etc.) for charging when the work is over or the power is insufficient.
以自移动设备为智能割草机为例,在自移动设备需要回归充电设备时,需要进行工作的区域通常通过铺设信号线围成(比如:交流电缆等),充电设备设置在信号线上,自移动设备沿着信号线移动即可回归充电设备。Taking the self-moving device as an intelligent lawn mower as an example, when the self-moving device needs to return to the charging device, the area that needs to be worked is usually surrounded by laying signal lines (such as AC cables, etc.), and the charging device is set on the signal line. The charging device can be returned to the mobile device by moving it along the signal line.
然而,随着工作区域的扩大,信号线的铺设长度也随之增大,自移动设备在回归充电设备的过程中沿着信号线移动的距离也会增大,这就会导致自移动设备回归充电设备的效率较低的问题。However, with the expansion of the working area, the laying length of the signal line also increases, and the distance that the self-moving device moves along the signal line during the process of returning to the charging device will also increase, which will lead to the return of the self-moving device to the charging device. The problem of lower efficiency of charging equipment.
发明内容SUMMARY OF THE INVENTION
本申请提供了一种自移动设备的自动回归系统和自移动设备,可以解决自移动设备沿区域边界回归充电设备时,回归效率较低的问题。本申请提供如下技术方案:The present application provides an automatic return system for a self-moving device and a self-moving device, which can solve the problem of low return efficiency when the self-moving device returns to a charging device along an area boundary. This application provides the following technical solutions:
第一方面,提供了一种自移动设备的自动回归系统,所述系统包括:所述自移动设备和至少一个标识装置;所述自移动设备在区域边界限定的工作区域内移动和/或工作;所述区域边界上还设置有所述自移动设备的充电设备;In a first aspect, an automatic regression system for self-moving equipment is provided, the system includes: the self-moving equipment and at least one identification device; the self-moving equipment moves and/or works within a work area defined by an area boundary ; The charging equipment of the self-moving equipment is also arranged on the boundary of the area;
所述标识装置,设置于所述区域边界上;The identification device is arranged on the boundary of the area;
所述自移动设备,包括:The self-moving equipment includes:
壳体;case;
移动组件,位于所述壳体上,用于带动所述自移动设备移动;a moving component, located on the casing, used to drive the self-moving device to move;
移动驱动组件,用于驱动所述移动组件运行;a moving drive assembly for driving the moving assembly to operate;
标识检测组件,用于检测所述标识装置;an identification detection component for detecting the identification device;
边界识别组件,用于识别所述区域边界;a boundary identification component for identifying the area boundary;
分别与所述标识检测组件、所述边界识别组件和所述移动驱动组件电性相连的控制组件,所述控制组件,用于:A control assembly electrically connected to the identification detection assembly, the boundary identification assembly and the mobile drive assembly respectively, the control assembly is used for:
控制所述自移动设备按照第一回归方向沿所述区域边界移动;controlling the self-moving device to move along the boundary of the area according to the first regression direction;
在所述标识检测组件检测到所述标识装置时,控制所述移动驱动组件调整回归方向,以使所述自移动设备按照第二回归方向移动;所述第二回归方向朝向所述工作区域内,且所述自移动设备按照所述第二回归方向移动至所述充电设备时的距离小于或等于其按照所述第一回归方向移动至所述充电设备时的距离;When the marking detection component detects the marking device, the mobile driving component is controlled to adjust the return direction, so that the self-moving device moves according to the second return direction; the second return direction is toward the working area , and the distance from the mobile device when it moves to the charging device according to the second return direction is less than or equal to the distance when it moves to the charging device according to the first return direction;
在所述边界识别组件检测到所述区域边界时,再次控制所述自移动设备按照所述第一回归方向沿所述区域边界移动至所述充电设备。When the boundary identification component detects the area boundary, the self-moving device is again controlled to move to the charging device along the area boundary according to the first return direction.
可选地,在所述标识装置的数量为多个时,不同标识装置具有不同的标识特征,且不同标识装置对应回归方向的调整角度不同。Optionally, when there are multiple identification devices, different identification devices have different identification features, and different identification devices have different adjustment angles corresponding to the return direction.
可选地,每个标识装置包括至少一个磁性件,所述标识特征包括所述磁性件的数量;相应地,所述标识检测组件用于检测所述磁性件的磁场信号,并将检测结果发送至所述控制组件;Optionally, each identification device includes at least one magnetic element, and the identification feature includes the number of the magnetic elements; correspondingly, the identification detection component is used to detect the magnetic field signal of the magnetic element, and send the detection result to the control assembly;
所述控制组件,还用于:The control assembly is also used for:
根据所述检测组件检测到的磁性件的数量,确定当前的标识装置。The current identification device is determined according to the number of magnetic pieces detected by the detection assembly.
可选地,所述磁性件包括条状磁性装置。Optionally, the magnetic element includes a strip-shaped magnetic device.
可选地,所述根据所述检测组件检测到的标识件的数量,确定当前的标识装置,包括:Optionally, the determining of the current identification device according to the number of identification pieces detected by the detection component includes:
在所述检测组件检测到所述磁性件后,对所述磁性件进行计数;After the detection component detects the magnetic piece, counting the magnetic piece;
若在预设时长内未再次检测到所述磁性件,则使用计数结果确定所述当前的标识装置。If the magnetic element is not detected again within a preset time period, the current identification device is determined by using the counting result.
可选地,对于包括多个磁性件的标识装置,各个磁性件均设置在所述区域边界上,且不同磁性件之间的间隔小于预设间隔;所述预设间隔为所述自移动设备在所述预设时长内移动的最小距离。Optionally, for a marking device including a plurality of magnetic pieces, each magnetic piece is arranged on the boundary of the region, and the interval between different magnetic pieces is smaller than a preset interval; the preset interval is the self-moving device. The minimum distance to move within the preset duration.
可选地,所述在所述标识检测组件检测到所述标识装置时,控制所述移动驱动组件调整回归方向,包括:Optionally, when the identification detection component detects the identification device, controlling the mobile drive assembly to adjust the return direction includes:
从预存的标识装置与调整角度的对应关系中,确定所述当前的标识装置对应的调整角度;按照确定出的调整角度调整所述回归方向;From the pre-stored correspondence between the identification device and the adjustment angle, determine the adjustment angle corresponding to the current identification device; adjust the return direction according to the determined adjustment angle;
或者,or,
获取所述当前的标识装置对应的第一位置信息;获取所述充电设备对应的第二位置信息;基于所述第一位置信息和所述第二位置信息确定所述充电设备相对于所述当前的标识装置的相对角度;基于所述相对角度确定所述调整角度;按照所述调整角度调整所述回归方向;所述相对角度大于所述调整角度;Acquire the first location information corresponding to the current identification device; acquire the second location information corresponding to the charging device; determine, based on the first location information and the second location information, relative to the current The relative angle of the identification device; the adjustment angle is determined based on the relative angle; the return direction is adjusted according to the adjustment angle; the relative angle is greater than the adjustment angle;
或者,or,
将所述当前的标识装置的标识信息发送至目标设备,以供所述目标设备接收用户设置的与所述当前的标识装置相对应的调整角度;接收所述目标设备反馈的所述调整角度;按照接收到的调整角度调整所述回归方向。sending the identification information of the current identification device to the target device, so that the target device can receive the adjustment angle corresponding to the current identification device set by the user; receive the adjustment angle fed back by the target device; The return direction is adjusted according to the received adjustment angle.
可选地,所述区域边界包括与所述充电设备相连的直线边界部分;所述直线边界部分为沿所述第一回归方向回归时最后经过的边界部分,所述直线边界部分上未设置有所述标识装置。Optionally, the area boundary includes a linear boundary portion connected to the charging device; the linear boundary portion is the boundary portion that passes through the last when returning along the first return direction, and the linear boundary portion is not provided with. the identification device.
可选地,所述标识装置与所述充电设备在所述第一回归方向上的最小距离大于或等于预设距离阈值。Optionally, a minimum distance between the identification device and the charging device in the first return direction is greater than or equal to a preset distance threshold.
第二方面,提供一种标识装置,用于第一方面提供的自移动设备的自动回归系统中,所述标识装置设置于所述自移动设备的工作区域的区域边界;所述区域边界上设置有所述自移动设备的充电设备。In a second aspect, an identification device is provided, which is used in the automatic regression system of the self-moving equipment provided in the first aspect, wherein the identification device is arranged on the area boundary of the working area of the self-moving equipment; There is a charging device for the self-moving device.
第三方面,提供一种自移动设备,用于第一方面提供的自移动设备的自动回归系统中,所述自移动设备在区域边界限定的工作区域内移动和/或工作;所述区域边界上还设置有所述自移动设备的充电设备;所述自移动设备,包括:A third aspect provides a self-moving device for use in the automatic regression system of the self-moving device provided in the first aspect, the self-moving device moves and/or works within a work area defined by an area boundary; the area boundary There is also a charging device for the self-moving device; the self-moving device includes:
壳体;case;
移动组件,位于所述壳体上,用于带动所述自移动设备移动;a moving component, located on the casing, used to drive the self-moving device to move;
移动驱动组件,用于驱动所述移动组件运行;a moving drive assembly for driving the moving assembly to operate;
标识检测组件,用于检测所述标识装置;an identification detection component for detecting the identification device;
边界识别组件,用于识别所述区域边界;a boundary identification component for identifying the area boundary;
分别与所述标识检测组件、所述边界识别组件和所述移动驱动组件电性相连的控制组件,所述控制组件,用于:A control assembly electrically connected to the identification detection assembly, the boundary identification assembly and the mobile drive assembly respectively, the control assembly is used for:
控制所述自移动设备按照第一回归方向沿所述区域边界移动;controlling the self-moving device to move along the boundary of the area according to the first regression direction;
所述标识检测组件检测到所述标识装置时,控制所述移动驱动组件调整回归方向,以使所述自移动设备按照第二回归方向移动;所述第二回归方向朝向所述工作区域内,且所述自移动设备按照所述第二回归方向移动至所述充电设备时的距离小于或等于其按照所述第一回归方向移动至所述充电设备时的距离;When the identification detection component detects the identification device, it controls the mobile drive assembly to adjust the return direction, so that the self-moving device moves according to the second return direction; the second return direction is toward the working area, And the distance from the mobile device when it moves to the charging device according to the second return direction is less than or equal to the distance when it moves to the charging device according to the first return direction;
在所述边界识别组件检测到所述区域边界时,再次控制所述自移动设备按照所述第一回归方向沿所述区域边界移动至所述充电设备。When the boundary identification component detects the area boundary, the self-moving device is again controlled to move to the charging device along the area boundary according to the first return direction.
本申请的有益效果在于:通过设置自移动设备和至少一个标识装置;标识装置设置于自移动设备的工作区域的区域边界;自移动设备包括移动组件、移动驱动组件、标识检测组件、边界识别组件和控制组件;控制组件,用于控制自移动设备按照第一回归方向沿区域边界移动;在标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离;在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备;可以解决自移动设备始终沿区域边界回归充电设备时回归效率较低的问题;通过在识别到标识装置时将回归方向从第一回归方向调整为第二回归方向,由于自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离,因此,可以缩短自移动设备的回归路径的长度,提高回归效率。The beneficial effects of the present application are as follows: by setting a self-moving device and at least one identification device; the identification device is arranged on the area boundary of the working area of the self-moving device; the self-moving device includes a moving component, a moving driving component, an identification detection component, and a boundary identification component and a control assembly; the control assembly is used to control the self-moving equipment to move along the area boundary according to the first return direction; when the identification detection assembly detects the identification device, the mobile drive assembly is controlled to adjust the return direction, so that the self-moving equipment follows the second return direction. direction movement; the second return direction is toward the working area, and the distance from the mobile device when it moves to the charging device according to the second return direction is less than or equal to the distance when it moves to the charging device according to the first return direction; in the boundary recognition component detection When reaching the area boundary, control the self-moving device to move to the charging device along the area boundary according to the first return direction again; it can solve the problem of low return efficiency when the self-moving device always returns to the charging device along the area boundary; Adjust the return direction from the first return direction to the second return direction. Since the distance from the mobile device when it moves to the charging device according to the second return direction is less than or equal to the distance when it moves to the charging device according to the first return direction, therefore, The length of the return path from the mobile device can be shortened, and the return efficiency can be improved.
上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,并可依照说明书的内容予以实施,以下以本申请的较佳实施例并配合附图详细说明如后。The above description is only an overview of the technical solutions of the present application. In order to understand the technical means of the present application more clearly and implement them in accordance with the contents of the description, the preferred embodiments of the present application and the accompanying drawings are described in detail below.
附图说明Description of drawings
图1是本申请一个实施例提供的自移动设备的自动回归系统的结构示意图;1 is a schematic structural diagram of an automatic regression system from a mobile device provided by an embodiment of the present application;
图2是本申请一个实施例提供的自移动设备的框图;2 is a block diagram of a self-mobile device provided by an embodiment of the present application;
图3是本申请一个实施例提供的自移动设备的又一框图;3 is another block diagram of a self-mobile device provided by an embodiment of the present application;
图4是本申请一个实施例提供的自移动设备的回归路径的示意图;4 is a schematic diagram of a return path from a mobile device provided by an embodiment of the present application;
图5是本申请一个实施例提供的自移动设备的自动回归方法的流程图。FIG. 5 is a flowchart of an automatic regression method from a mobile device provided by an embodiment of the present application.
具体实施方式Detailed ways
下面结合附图和实施例,对本申请的具体实施方式作进一步详细描述。以下实施例用于说明本申请,但不用来限制本申请的范围。The specific implementations of the present application will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are used to illustrate the present application, but are not intended to limit the scope of the present application.
图1是本申请一个实施例提供的自移动设备的自动回归系统的结构示意图,如图1所示,该系统至少包括:自移动设备10和至少一个标识装置20。FIG. 1 is a schematic structural diagram of an automatic regression system for a self-mobile device provided by an embodiment of the present application. As shown in FIG. 1 , the system at least includes: a self-
自移动设备10在区域边界限定的工作区域内移动和/或工作;区域边界30上设置有自移动设备的充电设备40。The self-moving
传统的自移动设备10在需要回归充电设备40时,按照预设的第一回归方向沿区域边界移动,直至到达充电设备40时停止。第一回归方向可以为逆时针或者顺时针,本实施例不对第一回归方向的设置方式作限定。但是,按照这种方式,自移动设备10往往需要沿区域边界行走很长的距离,这就会导致自移动设备10的回归效果较低的问题。When the conventional self-moving
基于此,本实施例中,自动回归系统还设置有标识装置20,该标识装置20设置于自移动设备10的工作区域的区域边界30上。Based on this, in this embodiment, the automatic regression system is further provided with an
标识装置20的设置目的为:触发自移动设备10在回归时调整回归方向,以使自移动设备10向工作区域内部移动,直至再次移动至区域边界时重新按照第一回归方向回归。这样,可以缩短自移动设备10回归充电设备40的距离,提高回归效率。The purpose of setting the
可选地,标识装置20的数量为一个或多个。在标识装置20的数量为多个时,不同标识装置20具有不同的标识特征,以使自移动设备10通过该标识特征检测出当前的标识装置。Optionally, the number of
可选地,标识装置20的实现方式包括但不限于以下几种中的至少一种:Optionally, the implementation manner of the
第一种:标识装置20包括至少一个磁性件;相应地,标识特征包括但不限于:信号强度和/或信号数量。The first type: the
在标识装置20包括多个磁性件时,不同磁性件之间的间隔相同或不同。图1中以标识装置20为3个为例进行说明,第一个标识装置20包括1个磁性件、第二标识装置20包括2个磁性件、第三个标识装置20包括3个磁性件。其中,第二标识装置20和第三个标识装置20中不同磁性件之间的设置距离相同。此时,不同标识装置20发射的磁信号的信号强度不同,且发射的磁信号的信号数量也不同。When the
示意性地,标识装置20为条形永磁体。这样,标识装置20无需外接能源即可引起周围环境的磁场变化,产生磁场信号。具体地,该条形的永磁体包括条状磁性装置,例如:为磁条或者由磁性物体排列形成的条状磁性装置。Illustratively, the marking
可选地,在其它实施方式中,磁性件还可以替换为发光件(可见光或者不可见光)、和/或声信号(比如:超声波信号)等,本实施例不对标识装置的实现方式作限定。Optionally, in other embodiments, the magnetic member may be replaced by a light-emitting member (visible light or invisible light), and/or an acoustic signal (eg, an ultrasonic signal), etc. This embodiment does not limit the implementation of the identification device.
第二种:标识装置20为包括标识图形的装置,标识图形可以是二维码、条形码等,本实施不对标识图形的实现方式作限定;相应地,标识特征包括标识图形的图形特征。The second type: the
可选地,标识装置20也可以实现为其它具有标识作用的装置,本实施例在此不对标识装置20的实现方式一一列举。Optionally, the
自移动设备10是指无需人工操作即可实现自动移动的设备。比如:智能割草机、扫地机器人、拖地机器人等,本实施例不对自移动设备10的设备类型作限定。The self-moving
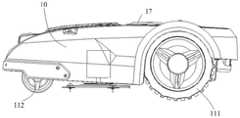
参考图2和图3所示的自移动设备10,该自移动设备10包括:Referring to the self-moving
壳体17;
移动组件111和112,位于壳体17上,用于带动自移动设备10移动;The moving
移动驱动组件11,用于驱动移动组件111和112运行;Moving the drive assembly 11 for driving the moving
标识检测组件12,用于检测标识装置20;The
边界识别组件13,用于识别区域边界30;The
分别与移动驱动组件11、标识检测组件12和边界识别组件13电性相连的控制组件14,用于:控制自移动设备10按照第一回归方向沿区域边界移动;在标识检测组件12检测到标识装置20时,控制移动驱动组件11调整回归方向,以使自移动设备10按照第二回归方向移动;在边界识别组件13检测到区域边界30时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备。The
其中,第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离。Wherein, the second return direction is toward the working area, and the distance from the mobile device when it moves to the charging device according to the second return direction is less than or equal to the distance when it moves to the charging device according to the first return direction.
本申请一个实施例中,通过在识别到标识装置时将回归方向从第一回归方向调整为第二回归方向,由于自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离,因此,可以缩短自移动设备的回归路径的长度,提高回归效率。In one embodiment of the present application, when the identification device is identified, the return direction is adjusted from the first return direction to the second return direction, because the distance from the mobile device when moving to the charging device according to the second return direction is less than or equal to the distance according to the second return direction. The distance when the first return direction moves to the charging device, therefore, the length of the return path from the mobile device can be shortened, and the return efficiency can be improved.
可选地,移动组件包括轮体和带动轮体转动的传动件,该轮体可以为车轮或者皮带轮等,本实施例不对移动组件的实现方式作限定。轮体可以有多种设置方法。在一个示例中,轮体包括由移动驱动组件11驱动的驱动轮111和辅助支撑壳体的辅助轮112,驱动轮的数量可以为1个、2个或者更多,辅助轮相应地也可以设为1个、2个或者多个。在本实施例中,自移动设备10的驱动轮为2个,分别为位于右侧的右驱动轮和位于左侧的左驱动轮。右驱动轮和左驱动轮关于自移动设备10的中轴线对称设置。辅助轮的中心位于中轴线上。右驱动轮和左驱动轮优选的位于壳体的后部,辅助轮位于前部。Optionally, the moving assembly includes a wheel body and a transmission member that drives the wheel body to rotate. The wheel body may be a wheel or a pulley, and the embodiment does not limit the implementation of the moving assembly. Wheels can be set up in a variety of ways. In one example, the wheel body includes a
移动驱动组件11可以为电机、马达等,本实施例不对移动驱动组件11的实现方式作限定。在本实施例中,右驱动轮和左驱动轮各自配接一个移动驱动组件,以实现差速输出以控制转向。移动驱动组件可以直接连接驱动轮,但也可以在移动驱动组件和驱动轮之间设传动装置,如本技术领域内常见的行星轮系等。在其他的实施例中,也可设置驱动轮2个,移动驱动组件1个,这种情况下,移动驱动组件通过第一传动装置驱动右驱动轮,通过第二传动装置驱动左驱动轮。即同一个马达通过不同的传动装置驱动右驱动轮和左驱动轮。The mobile drive assembly 11 may be a motor, a motor, or the like, and the implementation manner of the mobile drive assembly 11 is not limited in this embodiment. In this embodiment, the right driving wheel and the left driving wheel are each matched with a mobile driving assembly to realize differential output to control steering. The mobile drive assembly can be directly connected to the drive wheel, but a transmission device can also be provided between the mobile drive assembly and the drive wheel, such as a common planetary gear train in the technical field. In other embodiments, two drive wheels and one mobile drive assembly may be provided. In this case, the mobile drive assembly drives the right drive wheel through the first transmission device and drives the left drive wheel through the second transmission device. That is, the same motor drives the right drive wheel and the left drive wheel through different transmission devices.
可选地,控制组件14可以包括一个或多个处理核心,比如:4核心处理器、8核心处理器等。控制组件14可以采用DSP(Digital Signal Processing,数字信号处理)、FPGA(Field-Programmable Gate Array,现场可编程门阵列)、PLA(Programmable LogicArray,可编程逻辑阵列)中的至少一种硬件形式来实现。Optionally, the
控制组件14控制自移动设备10按照第一回归方向沿区域边界移动,包括:确定自移动设备10是否满足回归条件;在自移动设备10满足回归条件时,控制自移动设备10移动至区域边界30,并按照第一回归方向沿区域边界30移动。The
可选地,回归条件包括但不限于以下几种:自移动设备10的剩余电量小于或等于电量阈值;或者,自移动设备10接收到回归信号。其中,回归信号用于指示自移动设备10回归充电设备40。回归信号可以是用户通过人机交互控件输入的,或者是与自移动设备10通信相连的其它设备发送的,本实施例不对回归信号的来源作限定。Optionally, the regression conditions include but are not limited to the following: the remaining power of the self-
根据标识装置20的类型不同,标识检测组件12检测标识装置20的方式不同。下面,对标识检测组件12检测标识装置20的方式进行介绍。Depending on the type of
第一种方式:在标识装置20包括至少一个磁性件21时,标识检测组件12包括磁传感器,例如:地磁传感器。相应地,标识检测组件12检测标识装置20,包括:检测磁性件21的磁信号,并将检测结果发送至控制组件。The first way: when the
可选地,标识检测组件12在检测到磁性件21的磁场信号时,将检测结果发送至控制组件,在未检测到磁性件21的磁场信号时,不向控制组件发送检测结果。相应地,控制组件在接收到检测结果时,确定标识检测组件12检测到磁性件21。Optionally, the
或者,标识检测组件12每次检测磁性件21的磁场信号后,都将检测结果发送至控制组件,该检测结果携带有信号指示标识,该信号指示标识用于指示标识检测组件12是否检测到磁场信号。比如:信号指示标识1指示标识检测组件12检测到磁场信号,信号指示标识0指示标识检测组件12未检测到磁场信号。相应地,控制组件在接收到检测结果时,根据检测结果中的信号指示标识确定标识检测组件12是否检测到磁性件21。Alternatively, each time the
在实际实现时,标识检测组件12发送检测结果的方式也可以实现为其它方式,本实施例不对检测结果的发送方式作限定。In actual implementation, the manner in which the
在标识装置20的数量为多个,且标识特征包括磁场信号的数量时,若不同标识装置20对应回归方向的调整角度不同,则控制组件还需要根据磁性件21的数量确定出当前对应于哪个标识装置20。在第一种检测标识装置20的方式中,控制组件根据检测组件检测到的磁性件21的数量,确定当前的标识装置。When the number of
具体地,根据检测组件检测到的标识件的数量,确定当前的标识装置,包括:在检测组件检测到磁性件21后,对磁性件21进行计数;若在预设时长内未再次检测到磁性件21,则使用计数结果确定当前的标识装置。Specifically, determining the current identification device according to the number of identification pieces detected by the detection component includes: after the detection component detects the magnetic pieces 21, counting the magnetic pieces 21; if the magnetic pieces are not detected again within a preset time period 21, the count result is used to determine the current identification device.
在一种场景中,对于包括多个磁性件21的标识装置,各个磁性件21均设置在区域边界上,且不同磁性件21之间具有间隔。此时,对于同一个标识装置,自移动设备检测到一个磁性件21后,需要再移动一段距离才能检测到下一个磁性件21。为了保证在不同磁性件21之间移动时,不会误使用当前已检测到的磁性件21的数量确定标识装置,本实施例中,不同磁性件21之间的间隔小于预设间隔,预设间隔为自移动设备在预设时长内移动的最小距离。这样,自移动设备可以在检测到标识装置中全部的磁性件21后,才根据磁性件21的数量确定当前对应于哪一个标识装置,提高检测当前的标识装置的准确性。In one scenario, for a marking device including a plurality of magnetic elements 21 , each magnetic element 21 is disposed on the boundary of the region, and there are intervals between different magnetic elements 21 . At this time, for the same identification device, after a magnetic piece 21 is detected by the mobile device, it needs to move a certain distance before detecting the next magnetic piece 21 . In order to ensure that when moving between different magnetic parts 21, the number of magnetic parts 21 that have been detected will not be used to determine the identification device by mistake, in this embodiment, the interval between different magnetic parts 21 is smaller than the preset interval, and the preset The interval is the minimum distance moved from the mobile device within the preset duration. In this way, the self-moving device can determine which identification device currently corresponds to according to the number of magnetic elements 21 after detecting all the magnetic elements 21 in the identification device, thereby improving the accuracy of detecting the current identification device.
第二种方式,标识装置20包括标识图形,标识检测组件12包括图形扫描组件,例如:摄像头或者条码扫描器等。相应地,标识检测组件12检测标识装置20,包括:扫描标识图形,将扫描结果发送至控制组件。In a second manner, the
若不同标识装置20对应回归方向的调整角度不同,则控制组件还需要扫描结果确定出当前对应于哪个标识装置20。If the adjustment angles corresponding to the return direction of
在一个示例中,扫描结果包括标识图形。相应地,控制组件对标识图形进行识别,得到图形特征;根据图形特征与标识装置20之间的对应关系,确定当前的标识装置20。In one example, the scan results include identification graphics. Correspondingly, the control component recognizes the identification graphic to obtain graphic features; and determines the
在又一个示例中,扫描结果包括标识图形的图形特征。相应地,控制组件根据图形特征与标识装置20之间的对应关系,确定当前的标识装置20。In yet another example, the scan results include graphic features identifying the graphic. Correspondingly, the control component determines the
在其它实施方式中,不同标识装置20对应的回归方向也可以相同,此时,不同标识装置20可以具有相同的标识特征,此时,自移动设备一旦检测到标识装置20,就控制移动驱动组件按照固定的调整角度调整回归方向,得到第二回归方向。In other embodiments, the return directions corresponding to
可选地,基于上述实施例,控制移动驱动组件11调整回归方向的方式包括:从预存的标识装置与调整角度的对应关系中,确定当前的标识装置对应的调整角度;按照确定出的调整角度调整回归方向。Optionally, based on the above-mentioned embodiment, the method of controlling the mobile drive assembly 11 to adjust the return direction includes: from the pre-stored correspondence between the identification device and the adjustment angle, determining the adjustment angle corresponding to the current identification device; according to the determined adjustment angle Adjust the return direction.
其中,标识装置与调整角度的对应关系可以是用户输入的,或者是其它设备发送的,或者是自移动设备中默认存储的,本实施例不对标识装置与调整角度的对应关系的设置方式作限定。The corresponding relationship between the identification device and the adjustment angle may be input by the user, or sent by other devices, or stored by default in the mobile device. This embodiment does not limit the setting method of the corresponding relationship between the identification device and the adjustment angle. .
或者,获取当前的标识装置对应的第一位置信息;获取充电设备对应的第二位置信息;基于第一位置信息和第二位置信息确定充电设备相对于当前的标识装置的相对角度;基于相对角度确定调整角度;按照调整角度调整回归方向;相对角度大于调整角度。Or, obtain the first position information corresponding to the current identification device; obtain the second position information corresponding to the charging device; determine the relative angle of the charging device relative to the current identification device based on the first position information and the second position information; based on the relative angle Determine the adjustment angle; adjust the return direction according to the adjustment angle; the relative angle is greater than the adjustment angle.
其中,各个标识装置的第一位置信息和充电设备的第二位置信息预存在自移动设备中,第一位置信息和第二位置信息可以是用户输入的,或者是其它设备发送的,或者是自移动设备沿区域边界行走一圈后定位得到的,本实施例不对第一位置信息和第二位置信息的获取方式作限定。The first location information of each identification device and the second location information of the charging device are pre-stored in the self-mobile device, and the first location information and the second location information may be input by the user, or sent by other devices, or automatically This embodiment does not limit the acquisition methods of the first location information and the second location information, which is obtained by positioning the mobile device after walking a circle along the area boundary.
或者,将当前的标识装置的标识信息发送至目标设备,以供目标设备接收用户设置的与当前的标识装置相对应的调整角度;接收目标设备反馈的调整角度;按照接收到的调整角度调整回归方向。Or, send the identification information of the current identification device to the target device, so that the target device can receive the adjustment angle corresponding to the current identification device set by the user; receive the adjustment angle fed back by the target device; adjust the regression according to the received adjustment angle direction.
根据区域边界30的类型不同,边界识别组件13识别区域边界30的方式不同。下面,对边界识别组件13识别区域边界30的方式进行介绍。Depending on the type of
第一种方式:区域边界发射边界信号,边界识别组件13用于识别该边界信号,并将识别结果发送至控制组件。相应地,控制组件13用于根据识别结果确定是否到达区域边界。The first way: the area boundary transmits a boundary signal, and the
示意性地,识别结果包括边界信号的信号强度,控制组件13在信号强度大于或等于强度阈值时,确定到达区域边界;在信号强度小于强度阈值时,确定未到达区域边界。Illustratively, the identification result includes the signal strength of the boundary signal. When the signal strength is greater than or equal to the strength threshold, the
在一个示例中,边界识别组件13包括边界感应组件。边界感应组件包括:磁传感器,例如:霍尔传感器。磁传感器可以通过有无感应到边界中电流所产生的边界信号,并将感应到的边界信号发送至控制组件13。在其它实施方式中,边界信号也可以为光信号、声信号等,相应地,边界识别组件13适应性替换为能够识别边界信号的传感器,本实施例不对边界识别组件13的类型和边界信号的类型作限定。In one example,
在一个示例中,边界感应组件的数量为至少两个,且至少两个边界感应组件分别设置在壳体17的两侧。In one example, the number of boundary sensing components is at least two, and the at least two boundary sensing components are respectively disposed on both sides of the
第二种方式:边界识别组件13为图像采集设备,此时,边界识别组件13将采集到的地面图像发送至控制组件13。相应地,控制组件13使用图像识别算法,确定自移动设备与区域边界之间的位置关系,以确定是否到达区域边界。The second way: the
图像识别算法可以是基于机器学习进行边界识别;或者,是基于特征匹配进行区域识别,本实施例不对图像识别算法的算法类型作限定。The image recognition algorithm may perform boundary recognition based on machine learning; or, perform region recognition based on feature matching. This embodiment does not limit the algorithm type of the image recognition algorithm.
第三种方式:边界识别组件13为定位传感器,此时,边界识别组件13实时获取当前定位位置,并将该定位位置发送至控制组件13。相应地,控制组件13将定位位置与预存的区域边界的边界位置进行比较;根据比较结果确定自移动设备10是否到达区域边界。The third way: the
可选地,定位传感器可以为基于全球定位系统(Global Positioning System,GPS)实现定位的组件;或者,为基于实时动态(Real-time kinematic,RTK)载波相位差分技术实现定位的组件,本实施例不对定位传感器的实现方式作限定。Optionally, the positioning sensor may be a component that implements positioning based on a global positioning system (Global Positioning System, GPS); or, a component that implements positioning based on a real-time kinematic (Real-time kinematic, RTK) carrier phase difference technology, this embodiment The implementation of the positioning sensor is not limited.
需要补充说明的是,边界识别组件13也可以实现为其它类型,本实施例不对边界识别组件13识别区域边界30的方式作限定。It should be supplemented that the
可选地,由于在第一回归方向上,若自移动设备沿区域边界行走至充电设备的路径最短,此时,无需再修改回归方向。基于此,在一个示例中,若区域边界包括与充电设备相连的直线边界部分;该直线边界部分为沿第一回归方向回归时最后经过的边界部分;则直线边界部分上未设置有标识装置20。参考图1,若自移动设备10沿逆时针的第一回归方向回归,则在与充电设备40相连的区域边界30上的直线边界部分d未设置有标识装置20。Optionally, since in the first return direction, if the path from the mobile device to the charging device along the area boundary is the shortest, at this time, there is no need to modify the return direction. Based on this, in an example, if the area boundary includes a straight boundary portion connected to the charging device; the straight boundary portion is the boundary portion that passes through the last when returning along the first return direction; then the marking
可选地,在第一回归方向上,若自移动设备与充电设备之间的距离已经很近,此时,自移动设备即将到达充电设备,无需再修改回归方向。基于此,在又一个示例中,标识装置与充电设备在第一回归方向上的最小距离大于或等于预设距离阈值。Optionally, in the first return direction, if the distance between the self-moving device and the charging device is already very close, at this time, the self-moving device is about to reach the charging device, and there is no need to modify the return direction. Based on this, in yet another example, the minimum distance between the identification device and the charging device in the first return direction is greater than or equal to a preset distance threshold.
可选地,预设距离阈值可以是基于区域边界的总长度确定的,总长度与预设距离阈值呈正相关关系;比如:图1所示的工作区域为400m2的草坪,区域边界的总长度为(10+40)*2=100,相应地,预设距离阈值d为20m。或者,预设距离阈值为固定值。在实际实现时,预设距离阈值的取值可以为其它数值或者为其它设置方式,本实施例不对预设距离阈值的设置方式作限定。Optionally, the preset distance threshold may be determined basedon the total length of the area boundary, and the total length is positively correlated with the preset distance threshold; for example: the work area shown in FIG. is (10+40)*2=100, correspondingly, the preset distance threshold d is 20m. Alternatively, the preset distance threshold is a fixed value. In actual implementation, the value of the preset distance threshold may be other values or other setting methods, and this embodiment does not limit the setting method of the preset distance threshold.
可选地,控制组件再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备之后,若标识检测组件再次检测到标识装置,则再次执行在标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备的步骤;直至自移动设备移动至充电设备时停止。Optionally, after the control component again controls the mobile device to move to the charging device along the area boundary according to the first return direction, if the identification detection component detects the identification device again, the control movement is executed again when the identification detection component detects the identification device. The driving component adjusts the return direction, so that the self-moving device moves according to the second return direction; when the boundary identification component detects the area boundary, the step of controlling the self-moving device to move to the charging device along the area boundary according to the first return direction again; Stops when the mobile device moves to the charging device.
比如:参考图4所示的自移动设备10的回归路径(实线箭头所示),自移动设备10在需要回归充电设备40时,先移动至区域边界上并沿逆时针的第一回归方向沿区域边界移动。For example: referring to the return path of the self-
之后,首先检测到具有一个磁性件21的标识装置20,此时,回归方向的调整角度为α,得到第二回归方向;自移动设备10沿第二回归方向移动后,检测到区域边界,再次沿逆时针的第一回归方向沿区域边界移动。After that, the
之后,检测到具有两个磁性件21的标识装置20,此时,回归方向的调整角度为β,得到第二回归方向;自移动设备10沿第二回归方向移动后,检测到区域边界,再次沿逆时针的第一回归方向沿区域边界移动。After that, the
之后,检测到具有三个磁性件21的标识装置20,此时,回归方向的调整角度为γ,得到第二回归方向;自移动设备10沿第二回归方向移动后,检测到区域边界,再次沿逆时针的第一回归方向沿区域边界移动,直至移动至充电设备40。After that, the
需要补充说明的是,自移动设备10还可以包括其它组件,比如:能量模块15、通信模块16、存储组件18等,本实施例不对自移动设备10的结构一一说明。It should be supplemented that the self-moving
其中,能量模块15可拆卸或固定地安装于壳体,可以包括汽油、电池包等。在工作时,电池包释放电能以维持自移动设备10工作和行走。在非工作时,电池可以连接到外部电源以补充电能;自移动设备10也可以在探测到电量不足时,自动地寻找基站补充电能。Wherein, the
通信模块16用于与外部设备进行通信,比如:接收外部发送的消息,或向外部发送消息。The
存储组件18用于存储自移动设备10回归充电设备40时需要使用的数据和指令。可选地,存储组件18可以包括一个或多个计算机可读存储介质,该计算机可读存储介质可以是非暂态的。存储组件18还可包括高速随机存取存储器,以及非易失性存储器,比如:一个或多个磁盘存储设备、闪存存储设备。The
综上所述,本实施例提供的自移动设备的自动回归系统,通过设置自移动设备和至少一个标识装置;标识装置设置于自移动设备的工作区域的区域边界;自移动设备包括移动组件、移动驱动组件、标识检测组件、边界识别组件和控制组件;控制组件,用于控制自移动设备按照第一回归方向沿区域边界移动;在标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离;在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备;可以解决自移动设备始终沿区域边界回归充电设备时回归效率较低的问题;通过在识别到标识装置时将回归方向从第一回归方向调整为第二回归方向,由于自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离,因此,可以缩短自移动设备的回归路径的长度,提高回归效率。To sum up, the automatic regression system of the self-moving equipment provided in this embodiment is provided by setting the self-moving equipment and at least one identification device; the identification device is arranged on the area boundary of the working area of the self-moving equipment; the self-moving equipment includes a moving component, A mobile drive component, a mark detection component, a boundary identification component and a control component; the control component is used to control the self-moving device to move along the area boundary according to the first return direction; when the mark detection component detects the mark device, the mobile drive component is controlled to adjust the return direction, so that the self-moving device moves in the second return direction; the second return direction is toward the work area, and the distance from the mobile device when it moves to the charging device in the second return direction is less than or equal to the distance it moves to the charging device in the first return direction. The distance when charging the device; when the boundary recognition component detects the region boundary, it controls the self-mobile device to move to the charging device along the region boundary according to the first regression direction again; it can solve the problem that the regression efficiency is higher when the self-mobile device always returns to the charging device along the region boundary. Low problem; by adjusting the return direction from the first return direction to the second return direction when the identification device is identified, since the distance from the mobile device when moving to the charging device according to the second return direction is less than or equal to that according to the first return direction Therefore, the length of the return path from the mobile device can be shortened, and the return efficiency can be improved.
另外,无需在区域边界上设置信号线即可实现回归充电设备,因此,可以降低回归系统的实现难度。In addition, the return charging device can be realized without arranging the signal line on the area boundary, and therefore, the realization difficulty of the return system can be reduced.
可选地,本申请还提供一种自移动设备,该自移动设备用于图1所示的自移动设备的自动回归系统中,自移动设备在区域边界限定的工作区域内移动和/或工作;区域边界上还设置有自移动设备的充电设备;该自移动设备,包括:Optionally, the present application also provides a self-moving device, which is used in the automatic regression system of the self-moving device shown in FIG. ; There is also a charging device for self-moving equipment on the boundary of the area; the self-moving equipment includes:
壳体;case;
移动组件,位于壳体上,用于带动自移动设备移动;A mobile component, located on the casing, is used to drive the self-moving device to move;
移动驱动组件,用于驱动移动组件运行;The mobile drive assembly is used to drive the mobile assembly to run;
标识检测组件,用于检测标识装置;A mark detection component for detecting the mark device;
边界识别组件,用于识别区域边界;Boundary identification component, used to identify area boundaries;
分别与标识检测组件、边界识别组件和移动驱动组件电性相连的控制组件,控制组件,用于:A control assembly electrically connected to the identification detection assembly, the boundary identification assembly and the mobile drive assembly respectively, the control assembly is used for:
控制自移动设备按照第一回归方向沿区域边界移动;Controlling the self-moving device to move along the area boundary according to the first regression direction;
标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离;When the marking detection component detects the marking device, it controls the mobile driving component to adjust the return direction, so that the self-moving device moves according to the second return direction; the second return direction is toward the working area, and the self-moving device moves to the charging according to the second return direction. The distance when the device is less than or equal to the distance when it moves to the charging device according to the first return direction;
在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备。When the boundary identification component detects the area boundary, it controls the self-mobile device to move to the charging device along the area boundary according to the first return direction again.
本实施例的相关说明参考上述系统实施例。For the relevant description of this embodiment, reference is made to the above-mentioned system embodiment.
图5是本申请一个实施例提供的自移动设备的自动回归方法的流程图,本实施例以该方法用于上述实施例的自移动设备中为例进行说明,该方法至少包括如下几个步骤:5 is a flowchart of an automatic regression method from a mobile device provided by an embodiment of the present application. This embodiment is described by taking the method used in the self-mobile device of the above embodiment as an example, and the method at least includes the following steps :
步骤501,控制自移动设备按照第一回归方向沿区域边界移动。
控制组件控制自移动设备按照第一回归方向沿区域边界移动,包括:确定自移动设备是否满足回归条件;在自移动设备满足回归条件时,控制自移动设备移动至区域边界,并按照第一回归方向沿区域边界移动。The control component controls the self-moving device to move along the area boundary according to the first regression direction, including: determining whether the self-moving device satisfies the regression condition; when the self-moving device satisfies the regression condition, controlling the self-moving device to move to the area boundary, and according to the first regression The direction moves along the region boundaries.
可选地,回归条件包括但不限于以下几种:自移动设备的剩余电量小于或等于电量阈值;或者,自移动设备接收到回归信号。其中,回归信号用于指示自移动设备回归充电设备。回归信号可以是用户通过人机交互控件输入的,或者是与自移动设备通信相连的其它设备发送的,本实施例不对回归信号的来源作限定。Optionally, the regression conditions include, but are not limited to, the following: the remaining power of the self-mobile device is less than or equal to a power threshold; or, a regression signal is received from the mobile device. The return signal is used to instruct the self-mobile device to return to the charging device. The return signal may be input by the user through a human-computer interaction control, or sent by other devices that are communicatively connected to the self-mobile device, and the source of the return signal is not limited in this embodiment.
步骤502,标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离。
根据标识装置的类型不同,标识检测组件检测标识装置的方式不同。下面,对标识检测组件检测标识装置的方式进行介绍。Depending on the type of marking device, the marking detection assembly detects the marking device in different ways. In the following, the manner in which the identification detection component detects the identification device will be introduced.
第一种方式:在标识装置包括至少一个磁性件时,标识检测组件包括磁传感器,例如:地磁传感器。相应地,标识检测组件检测标识装置,包括:检测磁性件的磁信号,并将检测结果发送至控制组件。The first way: when the identification device includes at least one magnetic element, the identification detection component includes a magnetic sensor, such as a geomagnetic sensor. Correspondingly, the identification detection component detects the identification device, including: detecting the magnetic signal of the magnetic member, and sending the detection result to the control component.
可选地,标识检测组件在检测到磁性件的磁场信号时,将检测结果发送至控制组件,在未检测到磁性件的磁场信号时,不向控制组件发送检测结果。相应地,控制组件在接收到检测结果时,确定标识检测组件检测到磁性件。Optionally, the identification detection component sends the detection result to the control component when detecting the magnetic field signal of the magnetic component, and does not send the detection result to the control component when the magnetic field signal of the magnetic component is not detected. Correspondingly, when the control component receives the detection result, it is determined that the magnetic component is detected by the identification detection component.
或者,标识检测组件每次检测磁性件的磁场信号后,都将检测结果发送至控制组件,该检测结果携带有信号指示标识,该信号指示标识用于指示标识检测组件是否检测到磁场信号。比如:信号指示标识1指示标识检测组件检测到磁场信号,信号指示标识0指示标识检测组件未检测到磁场信号。相应地,控制组件在接收到检测结果时,根据检测结果中的信号指示标识确定标识检测组件是否检测到磁性件。Alternatively, after each time the identification detection component detects the magnetic field signal of the magnetic element, it sends a detection result to the control component, and the detection result carries a signal indicating identification, which is used to indicate whether the identification detection assembly detects the magnetic field signal. For example, the signal indication mark 1 indicates that the mark detection component detects a magnetic field signal, and the signal indication mark 0 indicates that the mark detection component does not detect the magnetic field signal. Correspondingly, when the control component receives the detection result, it determines whether the identification detection component detects the magnetic component according to the signal indication mark in the detection result.
在实际实现时,标识检测组件发送检测结果的方式也可以实现为其它方式,本实施例不对检测结果的发送方式作限定。In actual implementation, the manner in which the identification detection component sends the detection result may also be implemented in other manners, and this embodiment does not limit the manner in which the detection result is sent.
在标识装置的数量为多个,且标识特征包括磁场信号的数量时,若不同标识装置对应回归方向的调整角度不同,则控制组件还需要根据磁性件的数量确定出当前对应于哪个标识装置。在第一种检测标识装置的方式中,控制组件根据检测组件检测到的磁性件的数量,确定当前的标识装置。When the number of identification devices is multiple and the identification features include the number of magnetic field signals, if different identification devices have different adjustment angles corresponding to the return direction, the control component also needs to determine which identification device currently corresponds to according to the number of magnetic components. In the first method of detecting the identification device, the control component determines the current identification device according to the number of magnetic pieces detected by the detection component.
具体地,根据检测组件检测到的标识件的数量,确定当前的标识装置,包括:在检测组件检测到磁性件后,对磁性件进行计数;若在预设时长内未再次检测到磁性件,则使用计数结果确定当前的标识装置。Specifically, determining the current identification device according to the number of identification pieces detected by the detection component includes: after the detection component detects the magnetic piece, counting the magnetic pieces; if the magnetic piece is not detected again within a preset time period, The count result is then used to determine the current identification device.
第二种方式,标识装置包括标识图形,标识检测组件包括图形扫描组件,例如:摄像头或者条码扫描器等。相应地,标识检测组件检测标识装置,包括:扫描标识图形,将扫描结果发送至控制组件。In the second manner, the identification device includes an identification graphic, and the identification detection component includes a graphic scanning component, such as a camera or a barcode scanner. Correspondingly, the marking detection component detects the marking device, including: scanning the marking pattern, and sending the scanning result to the control component.
若不同标识装置对应回归方向的调整角度不同,则控制组件还需要扫描结果确定出当前对应于哪个标识装置。If the adjustment angles corresponding to the return direction of different identification devices are different, the control component also needs to scan the result to determine which identification device currently corresponds to.
在一个示例中,扫描结果包括标识图形。相应地,控制组件对标识图形进行识别,得到图形特征;根据图形特征与标识装置之间的对应关系,确定当前的标识装置。In one example, the scan results include identification graphics. Correspondingly, the control component recognizes the identification graphic to obtain the graphic features; and determines the current identification device according to the corresponding relationship between the graphic features and the identification device.
在又一个示例中,扫描结果包括标识图形的图形特征。相应地,控制组件根据图形特征与标识装置之间的对应关系,确定当前的标识装置。In yet another example, the scan results include graphic features identifying the graphic. Correspondingly, the control component determines the current identification device according to the corresponding relationship between the graphic features and the identification device.
在其它实施方式中,不同标识装置对应的回归方向也可以相同,此时,不同标识装置可以具有相同的标识特征,此时,自移动设备一旦检测到标识装置,就控制移动驱动组件按照固定的调整角度调整回归方向,得到第二回归方向。In other embodiments, the return directions corresponding to different identification devices may also be the same. In this case, different identification devices may have the same identification features. At this time, once the self-moving device detects the identification device, it controls the mobile drive assembly to follow the fixed Adjust the angle to adjust the return direction to get the second return direction.
可选地,基于上述实施例,控制移动驱动组件调整回归方向的方式包括:从预存的标识装置与调整角度的对应关系中,确定当前的标识装置对应的调整角度;按照确定出的调整角度调整回归方向。Optionally, based on the above embodiment, the method of controlling the mobile drive assembly to adjust the return direction includes: from the pre-stored correspondence between the identification device and the adjustment angle, determining the adjustment angle corresponding to the current identification device; adjusting according to the determined adjustment angle. return direction.
其中,标识装置与调整角度的对应关系可以是用户输入的,或者是其它设备发送的,或者是自移动设备中默认存储的,本实施例不对标识装置与调整角度的对应关系的设置方式作限定。The corresponding relationship between the identification device and the adjustment angle may be input by the user, or sent by other devices, or stored by default in the mobile device. This embodiment does not limit the setting method of the corresponding relationship between the identification device and the adjustment angle. .
或者,获取当前的标识装置对应的第一位置信息;获取充电设备对应的第二位置信息;基于第一位置信息和第二位置信息确定充电设备相对于当前的标识装置的相对角度;基于相对角度确定调整角度;按照调整角度调整回归方向;相对角度大于调整角度。Or, obtain the first position information corresponding to the current identification device; obtain the second position information corresponding to the charging device; determine the relative angle of the charging device relative to the current identification device based on the first position information and the second position information; based on the relative angle Determine the adjustment angle; adjust the return direction according to the adjustment angle; the relative angle is greater than the adjustment angle.
其中,各个标识装置的第一位置信息和充电设备的第二位置信息预存在自移动设备中,第一位置信息和第二位置信息可以是用户输入的,或者是其它设备发送的,或者是自移动设备沿区域边界行走一圈后定位得到的,本实施例不对第一位置信息和第二位置信息的获取方式作限定。The first location information of each identification device and the second location information of the charging device are pre-stored in the self-mobile device, and the first location information and the second location information may be input by the user, or sent by other devices, or automatically This embodiment does not limit the acquisition methods of the first location information and the second location information, which is obtained by positioning the mobile device after walking a circle along the area boundary.
或者,将当前的标识装置的标识信息发送至目标设备,以供目标设备接收用户设置的与当前的标识装置相对应的调整角度;接收目标设备反馈的调整角度;按照接收到的调整角度调整回归方向。Or, send the identification information of the current identification device to the target device, so that the target device can receive the adjustment angle corresponding to the current identification device set by the user; receive the adjustment angle fed back by the target device; adjust the regression according to the received adjustment angle direction.
步骤503,在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备。Step 503 , when the boundary identification component detects the area boundary, it controls the self-mobile device to move to the charging device along the area boundary according to the first return direction again.
根据区域边界的类型不同,边界识别组件识别区域边界的方式不同。下面,对边界识别组件识别区域边界的方式进行介绍。Depending on the type of area boundary, the boundary recognition component recognizes area boundaries in different ways. In the following, the manner in which the boundary recognition component recognizes the area boundary will be introduced.
第一种方式:区域边界发射边界信号,边界识别组件用于识别该边界信号,并将识别结果发送至控制组件。相应地,控制组件用于根据识别结果确定是否到达区域边界。The first way: the area boundary transmits a boundary signal, and the boundary identification component is used to identify the boundary signal, and send the identification result to the control component. Correspondingly, the control component is used to determine whether the area boundary is reached according to the recognition result.
示意性地,识别结果包括边界信号的信号强度,控制组件在信号强度大于或等于强度阈值时,确定到达区域边界;在信号强度小于强度阈值时,确定未到达区域边界。Illustratively, the identification result includes the signal strength of the boundary signal, and the control component determines that the area boundary is reached when the signal strength is greater than or equal to the strength threshold; and determines that the area boundary is not reached when the signal strength is less than the strength threshold.
在一个示例中,边界识别组件包括边界感应组件。边界感应组件包括:磁传感器,例如:霍尔传感器。磁传感器可以通过有无感应到边界中电流所产生的边界信号,并将感应到的边界信号发送至控制组件。在其它实施方式中,边界信号也可以为光信号、声信号等,相应地,边界识别组件适应性替换为能够识别边界信号的传感器,本实施例不对边界识别组件的类型和边界信号的类型作限定。In one example, the boundary recognition component includes a boundary sensing component. Boundary sensing components include: magnetic sensors, such as: Hall sensors. The magnetic sensor can sense the boundary signal generated by the current in the boundary, and send the sensed boundary signal to the control component. In other implementation manners, the boundary signal may also be an optical signal, an acoustic signal, etc. Correspondingly, the boundary recognition component is adaptively replaced with a sensor capable of recognizing the boundary signal. This embodiment does not make any difference between the type of the boundary recognition component and the type of the boundary signal. limited.
在一个示例中,边界感应组件的数量为至少两个,且至少两个边界感应组件分别设置在壳体的两侧。In one example, the number of boundary sensing components is at least two, and the at least two boundary sensing components are respectively disposed on both sides of the housing.
第二种方式:边界识别组件为图像采集设备,此时,边界识别组件13将采集到的地面图像发送至控制组件。相应地,控制组件使用图像识别算法,确定自移动设备与区域边界之间的位置关系,以确定是否到达区域边界。The second way: the boundary recognition component is an image acquisition device, and at this time, the
图像识别算法可以是基于机器学习进行边界识别;或者,是基于特征匹配进行区域识别,本实施例不对图像识别算法的算法类型作限定。The image recognition algorithm may perform boundary recognition based on machine learning; or, perform region recognition based on feature matching. This embodiment does not limit the algorithm type of the image recognition algorithm.
第三种:边界识别组件为定位传感器,此时,边界识别组件实时获取当前定位位置,并将该定位位置发送至控制组件。相应地,控制组件将定位位置与预存的区域边界的边界位置进行比较;根据比较结果确定自移动设备是否到达区域边界。The third type: the boundary recognition component is a positioning sensor. At this time, the boundary recognition component acquires the current positioning position in real time, and sends the positioning position to the control component. Correspondingly, the control component compares the positioning position with the pre-stored boundary position of the area boundary; and determines whether the self-mobile device reaches the area boundary according to the comparison result.
可选地,定位传感器可以为基于全球定位系统(Global Positioning System,GPS)实现定位的组件;或者,为基于实时动态(Real-time kinematic,RTK)载波相位差分技术实现定位的组件,本实施例不对定位传感器的实现方式作限定。Optionally, the positioning sensor may be a component that implements positioning based on a global positioning system (Global Positioning System, GPS); or, a component that implements positioning based on a real-time kinematic (Real-time kinematic, RTK) carrier phase difference technology, this embodiment The implementation of the positioning sensor is not limited.
需要补充说明的是,边界识别组件也可以实现为其它类型,本实施例不对边界识别组件识别区域边界的方式作限定。It should be added that the boundary recognition component may also be implemented in other types, and this embodiment does not limit the manner in which the boundary recognition component recognizes the area boundary.
可选地,在本步骤之后,若标识检测组件再次检测到标识装置,则再次执行步骤501,即,再次执行在标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备的步骤;直至自移动设备移动至充电设备时停止。Optionally, after this step, if the identification detection assembly detects the identification device again, step 501 is executed again, that is, when the identification detection assembly detects the identification device, the mobile driving assembly is controlled to adjust the return direction, so that the automatic The mobile device moves according to the second return direction; when the boundary recognition component detects the area boundary, it controls the steps of moving from the mobile device to the charging device along the area boundary according to the first return direction again; and stops when moving from the mobile device to the charging device.
本实施例的相关说明参见上述系统实施例,本实施例在此不再赘述。For the relevant description of this embodiment, refer to the foregoing system embodiment, which will not be repeated in this embodiment.
综上所述,本实施例提供的自移动设备的自动回归方法,通过控制自移动设备按照第一回归方向沿区域边界移动;在标识检测组件检测到标识装置时,控制移动驱动组件调整回归方向,以使自移动设备按照第二回归方向移动;第二回归方向朝向工作区域内,且自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离;在边界识别组件检测到区域边界时,再次控制自移动设备按照第一回归方向沿区域边界移动至充电设备;可以解决自移动设备始终沿区域边界回归充电设备时回归效率较低的问题;通过在识别到标识装置时将回归方向从第一回归方向调整为第二回归方向,由于自移动设备按照第二回归方向移动至充电设备时的距离小于或等于其按照第一回归方向移动至充电设备时的距离,因此,可以缩短自移动设备的回归路径的长度,提高回归效率。To sum up, the automatic regression method for self-moving equipment provided in this embodiment controls the self-moving equipment to move along the region boundary according to the first regression direction; when the identification detection component detects the identification device, the mobile driving component is controlled to adjust the return direction , so that the self-moving device moves in the second return direction; the second return direction is toward the working area, and the distance from the mobile device when it moves to the charging device in the second return direction is less than or equal to its movement to the charging device in the first return direction The distance when the device is used; when the boundary recognition component detects the area boundary, it controls the self-mobile device to move to the charging device along the area boundary according to the first regression direction again; it can solve the problem that the return efficiency is low when the self-mobile device always returns to the charging device along the area boundary By adjusting the return direction from the first return direction to the second return direction when the identification device is identified, since the distance from the mobile device when moving to the charging device according to the second return direction is less than or equal to its first return direction Therefore, the length of the return path from the mobile device can be shortened, and the return efficiency can be improved.
可选地,本申请还提供一种标识装置,该标识装置用于图1所示的自移动设备的自动回归系统中,设置于自移动设备的工作区域的区域边界,并发射标识信号;区域边界上设置有自移动设备的充电设备。Optionally, the present application also provides a kind of identification device, which is used in the automatic regression system of the self-moving equipment shown in FIG. 1 , is arranged on the area boundary of the working area of the self-moving equipment, and transmits an identification signal; A charging device for self-moving devices is provided on the boundary.
可选地,标识装置包括至少一个磁性件;在标识装置包括多个磁性件时,不同磁性件之间的设置距离相同或不同。Optionally, the identification device includes at least one magnetic element; when the identification device includes a plurality of magnetic elements, the disposition distances between different magnetic elements are the same or different.
本实施例的相关说明参考上述系统实施例。For the relevant description of this embodiment, reference is made to the above-mentioned system embodiment.
可选地,本申请还提供有一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,所述程序由处理器加载并执行以实现上述方法实施例的自移动设备的自动回归方法。Optionally, the present application further provides a computer-readable storage medium, where a program is stored in the computer-readable storage medium, and the program is loaded and executed by a processor to implement the automatic regression from the mobile device according to the above method embodiment. method.
可选地,本申请还提供有一种计算机产品,该计算机产品包括计算机可读存储介质,所述计算机可读存储介质中存储有程序,所述程序由处理器加载并执行以实现上述方法实施例的自移动设备的自动回归方法。Optionally, the present application further provides a computer product, the computer product includes a computer-readable storage medium, and a program is stored in the computer-readable storage medium, and the program is loaded and executed by a processor to implement the above method embodiments The automatic regression method from mobile devices.
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。The technical features of the above-described embodiments can be combined arbitrarily. For the sake of brevity, all possible combinations of the technical features in the above-described embodiments are not described. However, as long as there is no contradiction between the combinations of these technical features, All should be regarded as the scope described in this specification.
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。The above-mentioned embodiments only represent several embodiments of the present application, and the descriptions thereof are specific and detailed, but should not be construed as a limitation on the scope of the invention patent. It should be pointed out that for those skilled in the art, without departing from the concept of the present application, several modifications and improvements can be made, which all belong to the protection scope of the present application. Therefore, the scope of protection of the patent of the present application shall be subject to the appended claims.
Claims (10)
Translated fromChinesePriority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011514815.3ACN114661037A (en) | 2020-12-22 | 2020-12-22 | Automatic regression system and self-moving equipment |
| PCT/CN2021/122649WO2022134735A1 (en) | 2020-12-22 | 2021-10-08 | Self-moving device, return control method therefor, and automatic working system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011514815.3ACN114661037A (en) | 2020-12-22 | 2020-12-22 | Automatic regression system and self-moving equipment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114661037Atrue CN114661037A (en) | 2022-06-24 |
Family
ID=82025467
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011514815.3APendingCN114661037A (en) | 2020-12-22 | 2020-12-22 | Automatic regression system and self-moving equipment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114661037A (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160113195A1 (en)* | 2014-10-28 | 2016-04-28 | Deere & Company | Robotic mower navigation system |
| CN107608341A (en)* | 2016-07-11 | 2018-01-19 | 苏州宝时得电动工具有限公司 | Automatic working system and the rehabilitation control method from mobile gardening equipment |
| CN111146826A (en)* | 2018-11-05 | 2020-05-12 | 苏州宝时得电动工具有限公司 | Self-moving equipment, wireless charging station, automatic working system and charging method thereof |
| CN111226182A (en)* | 2018-08-08 | 2020-06-02 | 苏州宝时得电动工具有限公司 | Self-moving equipment, automatic working system and control method thereof |
| WO2020228262A1 (en)* | 2019-05-15 | 2020-11-19 | 苏州科瓴精密机械科技有限公司 | Method for controlling autonomous mobile robot, and autonomous mobile robot system |
- 2020
- 2020-12-22CNCN202011514815.3Apatent/CN114661037A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160113195A1 (en)* | 2014-10-28 | 2016-04-28 | Deere & Company | Robotic mower navigation system |
| CN107608341A (en)* | 2016-07-11 | 2018-01-19 | 苏州宝时得电动工具有限公司 | Automatic working system and the rehabilitation control method from mobile gardening equipment |
| CN111226182A (en)* | 2018-08-08 | 2020-06-02 | 苏州宝时得电动工具有限公司 | Self-moving equipment, automatic working system and control method thereof |
| CN111146826A (en)* | 2018-11-05 | 2020-05-12 | 苏州宝时得电动工具有限公司 | Self-moving equipment, wireless charging station, automatic working system and charging method thereof |
| WO2020228262A1 (en)* | 2019-05-15 | 2020-11-19 | 苏州科瓴精密机械科技有限公司 | Method for controlling autonomous mobile robot, and autonomous mobile robot system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210393099A1 (en) | Mobile device docking method and mobile device | |
| US11910742B2 (en) | Moving robot, system of moving robot and method for moving to charging station of moving robot | |
| CN109730590B (en) | Cleaning robot and method for automatically returning and charging same | |
| CN109946715B (en) | Detection method, device, mobile robot and storage medium | |
| CN114815839B (en) | System and method for docking a robotic lawn mower | |
| JP5860998B2 (en) | System and method for guiding a robot cleaner along a path | |
| US20210100160A1 (en) | Moving robot and method of controlling the same | |
| CN102844722B (en) | Robotic garden tool following a lead at a distance using multiple signals | |
| US11064858B2 (en) | Robot cleaner and control method thereof | |
| JP2019515393A (en) | Cleaning robot and control method thereof | |
| US20180296049A1 (en) | Vacuum cleaner | |
| CN110477825A (en) | Clean robot, recharging method, system and readable storage medium storing program for executing | |
| KR20190123673A (en) | Moving Robot and controlling method for the same | |
| CN107041718A (en) | Cleaning robot and control method thereof | |
| CN108988403B (en) | Autonomous charging system, autonomous mobile device and charging station | |
| CN113168180B (en) | Mobile device and object detection method thereof | |
| EP4118509A1 (en) | System and method for improved navigation of a robotic work tool | |
| CN112578787B (en) | Object searching method, device and storage medium | |
| JP2011245295A (en) | Direction device and operation system utilizing the same | |
| US20200189107A1 (en) | Artificial intelligence moving robot and method for controlling the same | |
| CN104149781B (en) | Intelligent carrier control system and control method | |
| CN104793614A (en) | Automatic walking equipment return guidance system | |
| CN110543170A (en) | Charging control method and device for robot and robot with charging control device | |
| CN102087529B (en) | Movable device and control method thereof | |
| CN110758152A (en) | Intelligent robot, charging pile and intelligent robot autonomous charging and docking method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication | Application publication date:20220624 |