CN114523838A - A hybrid two-way driving unmanned mining dump truck chassis - Google Patents
A hybrid two-way driving unmanned mining dump truck chassisDownload PDFInfo
- Publication number
- CN114523838A CN114523838ACN202210177032.3ACN202210177032ACN114523838ACN 114523838 ACN114523838 ACN 114523838ACN 202210177032 ACN202210177032 ACN 202210177032ACN 114523838 ACN114523838 ACN 114523838A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- subsystem
- driving
- steering
- chassis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/04—Arrangement or mounting of electrical propulsion units of the electric storage means for propulsion
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/52—Driving a plurality of drive axles, e.g. four-wheel drive
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/142—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering specially adapted for particular vehicles, e.g. tractors, carts, earth-moving vehicles, trucks
- B62D7/144—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering specially adapted for particular vehicles, e.g. tractors, carts, earth-moving vehicles, trucks for vehicles with more than two axles
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/04—Arrangement or mounting of electrical propulsion units of the electric storage means for propulsion
- B60K2001/0405—Arrangement or mounting of electrical propulsion units of the electric storage means for propulsion characterised by their position
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于工程车辆技术领域,具体地说,本发明涉及一种混动双向行驶无人驾驶矿用自卸车底盘。The invention belongs to the technical field of engineering vehicles, in particular, the invention relates to a hybrid two-way driving unmanned mining dump truck chassis.
背景技术Background technique
矿用自卸车,用于矿场运输煤炭或矿石。矿用自卸车多为单方向行驶,将物料卸下的过程中需要调转车头再原路返回,车辆转场效率较低;物料卸载只能按一个方向进行,物料卸载不方便。Mining dump trucks are used to transport coal or ore in mines. Most mining dump trucks drive in one direction. During the process of unloading materials, it is necessary to turn the head of the truck and then return to the original road. The efficiency of vehicle transfer is low; the material unloading can only be carried out in one direction, which is inconvenient for material unloading.
此外,传统矿用自卸车依靠人工驾驶,需要大量的人力,这对于地处偏远的矿区,无疑增加了更多的人力成本。In addition, traditional mining dump trucks rely on manual driving, which requires a lot of manpower, which undoubtedly increases labor costs for remote mining areas.
发明内容SUMMARY OF THE INVENTION
本发明提供一种混动双向行驶无人驾驶矿用自卸车底盘,以解决上述背景技术中存在的问题。The present invention provides a hybrid two-way driving unmanned mining dump truck chassis to solve the problems existing in the above background technology.
为了实现上述目的,本发明采取的技术方案为:一种混动双向行驶无人驾驶矿用自卸车底盘,包括底盘、自卸车斗和前后无人驾驶模块,所述自卸车斗通过举升油缸与底盘连接,所述前后无人驾驶模块与底盘端部连接。In order to achieve the above purpose, the technical solution adopted in the present invention is: a hybrid two-way driving unmanned mining dump truck chassis, including a chassis, a dump truck bucket and front and rear unmanned modules, the dump truck bucket is driven by a lifting oil cylinder Connected with the chassis, the front and rear unmanned modules are connected with the end of the chassis.
所述底盘包括车架、驱动系统和增程器,所述增程器由发电机与发动机组成,所述增程器与车架端部连接,所述增程器通过发动机带动发电机工作,所述驱动系统通过悬架与车架连接。The chassis includes a frame, a drive system and a range extender, the range extender is composed of a generator and an engine, the range extender is connected to the end of the frame, and the range extender drives the generator to work through the engine, The drive system is connected to the frame through the suspension.
优选的,所述驱动系统设有两组,且在车架的两端对称布置,所述驱动系统包括驱动电机、第一传动轴、变速箱、第二传动轴、第一转向驱动桥、第三传动轴和第二转向驱动桥,所述驱动电机和变速箱通过悬置安装在车架上,所述驱动电机通过第一传动轴与变速箱连接,所述变速箱通过第二传动轴与第一转向驱动桥连接,所述第一转向驱动桥通过第三传动轴与第二转向驱动桥连接。Preferably, there are two sets of the drive system, which are arranged symmetrically at both ends of the frame, and the drive system includes a drive motor, a first transmission shaft, a gearbox, a second transmission shaft, a first steering drive axle, a Three drive shafts and a second steering drive axle, the drive motor and gearbox are mounted on the frame by suspension, the drive motor is connected to the gearbox through the first drive shaft, and the gearbox is connected to the gearbox through the second drive shaft The first steering drive axle is connected, and the first steering drive axle is connected with the second steering drive axle through the third transmission shaft.
优选的,所述变速箱前进和倒退档位数相同。Preferably, the forward and reverse gears of the gearbox are the same.
优选的,所述车架两侧对称设有动力电池,且动力电池与发电机和驱动电机都是电性连接,所述增程器和动力电池一起给驱动电机供电,所述增程器给动力电池充电。Preferably, a power battery is symmetrically arranged on both sides of the frame, and the power battery is electrically connected to the generator and the drive motor. The range extender and the power battery together supply power to the drive motor, and the range extender supplies power to the drive motor. Power battery charging.
优选的,所述第一转向驱动桥和第二转向驱动桥采用转向油缸进行液压转向,所述发动机通过传动轴驱动油泵,且油泵从发动机取力驱动转向油缸运动进行转向。Preferably, the first steering drive axle and the second steering drive axle use a steering oil cylinder for hydraulic steering, the engine drives an oil pump through a transmission shaft, and the oil pump takes power from the engine to drive the steering oil cylinder to move for steering.
优选的,所述前后无人驾驶模块具体包括融合感知子系统、控制子系统、远程子系统、车交互子系统和执行子系统,所述控制子系统包括自动驾驶控制系统和整车控制器,所述自动驾驶控制系统和整车控制器数据相通连接,所述融合感知子系统与自动驾驶控制系统通过数据信号线连接,所述远程子系统、车交互子系统和执行子系统都与整车控制器连接。Preferably, the front and rear unmanned modules specifically include a fusion perception subsystem, a control subsystem, a remote subsystem, a vehicle interaction subsystem and an execution subsystem, and the control subsystem includes an automatic driving control system and a vehicle controller, The automatic driving control system and the vehicle controller are connected in data communication, the fusion perception subsystem and the automatic driving control system are connected through a data signal line, and the remote subsystem, the vehicle interaction subsystem and the execution subsystem are all connected to the vehicle. Controller connection.
所述融合感知子系统包括激光雷达传感器、毫米波雷达传感器、超声波雷达传感器、前视摄像头、环视摄像头和组合导航系统。The fusion perception subsystem includes a lidar sensor, a millimeter-wave radar sensor, an ultrasonic radar sensor, a front-view camera, a surround-view camera, and an integrated navigation system.
所述激光雷达传感器优选四个,分布在车辆的四周。There are preferably four lidar sensors, which are distributed around the vehicle.
所述毫米波雷达传感器优选两个,分布在车辆的前后。There are preferably two millimeter-wave radar sensors, which are distributed in the front and rear of the vehicle.
所述超声波雷达传感器优选十六个,分布在车辆的四周。The ultrasonic radar sensors are preferably sixteen, which are distributed around the vehicle.
所述前视摄像头优选两个,分布在车辆前端。There are preferably two front-view cameras, which are distributed at the front end of the vehicle.
所述环视摄像头优选四个,分布在车辆的四周。There are preferably four surround-view cameras, which are distributed around the vehicle.
所述组合导航系统优选GPS/IMU/INS组成,配合着基站实现全天候、完全自主、不受外界干扰的全导航参数。The integrated navigation system is preferably composed of GPS/IMU/INS, and cooperates with the base station to achieve all-weather, fully autonomous, and full navigation parameters free from external interference.
所述执行子系统分为驱动系统、转向系统、制动系统。The execution subsystem is divided into a driving system, a steering system, and a braking system.
所述交互子系统分为显示屏、灯光系统、语音系统组成。The interactive subsystem is divided into a display screen, a lighting system, and a voice system.
所述远程子系统由T-box、云端服务器、终端系统组成。The remote subsystem consists of a T-box, a cloud server, and a terminal system.
采用以上技术方案的有益效果是:The beneficial effects of adopting the above technical solutions are:
1、本发明的混动双向行驶无人驾驶矿用自卸车底盘,采用混合动力方案,增程器通过发动机带动发电机工作,采用两组驱动系统,且在车架的两端对称布置,所述驱动系统包括驱动电机、第一传动轴、变速箱、第二传动轴、第一转向驱动桥、第三传动轴和第二转向驱动桥,所述驱动电机和变速箱通过悬置安装在车架上,所述驱动电机通过第一传动轴与变速箱连接,所述变速箱通过第二传动轴与第一转向驱动桥连接,所述第一转向驱动桥通过第三传动轴与第二转向驱动桥连接;前后双电机驱动,确保车辆动力性的同时保证了车辆较高的续驶里程。1. The hybrid two-way driving unmanned mining dump truck chassis of the present invention adopts a hybrid scheme, the range extender drives the generator to work through the engine, adopts two sets of drive systems, and is symmetrically arranged at both ends of the frame, so the The drive system includes a drive motor, a first drive shaft, a gearbox, a second drive shaft, a first steering drive axle, a third drive shaft and a second steering drive axle, and the drive motor and the gearbox are mounted on the vehicle through suspension. On the frame, the drive motor is connected to the gearbox through the first transmission shaft, the gearbox is connected to the first steering drive axle through the second transmission shaft, and the first steering drive axle is connected to the second steering drive through the third transmission shaft. The drive axle is connected; the front and rear dual motors are driven to ensure the power of the vehicle and ensure a high driving mileage of the vehicle.
所述车架两侧对称设有动力电池,且动力电池与发电机和驱动电机都是电性连接,所述增程器和动力电池一起给驱动电机供电,所述增程器给动力电池充电;节能环保的同时,解决了电动车需要频繁充电的问题。The two sides of the frame are symmetrically provided with power batteries, and the power batteries are electrically connected to the generator and the drive motor. The range extender and the power battery together supply power to the drive motor, and the range extender charges the power battery. ; While saving energy and protecting the environment, it solves the problem that electric vehicles need to be charged frequently.
2、本发明的混动双向行驶无人驾驶矿用自卸车底盘,所述变速箱前进和倒退档位数相同,实现双向行驶,无需掉头即可原路返回,提高了生产效率;所述第一转向驱动桥和第二转向驱动桥采用转向油缸进行液压转向,所述发动机上设有油泵,且油泵从发动机取力驱动转向油缸运动进行转向,实现全轮转向,解决了车辆在狭小空间调头难的问题,同时提升了作业效率和车辆行驶安全性。2. In the hybrid two-way driving unmanned mining dump truck chassis of the present invention, the forward and reverse gears of the gearbox are the same, which realizes two-way driving, can return to the original road without turning around, and improves the production efficiency; The first steering drive axle and the second steering drive axle use a steering oil cylinder for hydraulic steering. The engine is provided with an oil pump, and the oil pump takes power from the engine to drive the steering cylinder to move, realize all-wheel steering, and solve the problem of turning the vehicle in a narrow space. difficult problems, while improving work efficiency and vehicle driving safety.
3、本发明的混动双向行驶无人驾驶矿用自卸车底盘,采用无人驾驶系统,减少了人力资源,提高了矿用自卸车的出勤效率,节约人力资源。3. The hybrid two-way driving unmanned mining dump truck chassis of the present invention adopts an unmanned driving system, which reduces human resources, improves the attendance efficiency of the mining dump truck, and saves human resources.
附图说明Description of drawings
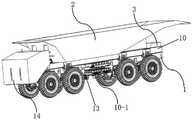
图1是本发明的混动双向行驶无人驾驶矿用自卸车底盘装配图;Fig. 1 is the chassis assembly drawing of the hybrid two-way driving unmanned mining dump truck of the present invention;
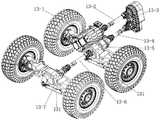
图2是驱动系统装配图一;Figure 2 is a drive system assembly drawing 1;
图3是驱动系统装配图二;Figure 3 is a second assembly drawing of the drive system;
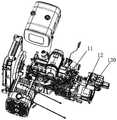
图4是发动机、发电机、油泵装配图;Figure 4 is an assembly drawing of an engine, a generator and an oil pump;
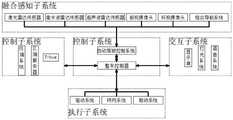
图5是前后无人驾驶模块控制原理图;Figure 5 is the control principle diagram of the front and rear unmanned modules;
其中:in:
1、底盘;2、自卸车斗;3、前后无人驾驶模块;1. Chassis; 2. Dump truck body; 3. Front and rear driverless modules;
10、车架;10-1、动力电池;11、发动机;12、发电机;13、驱动系统;13-1、驱动电机;13-2、第一传动轴;13-3、变速箱;13-4、第二传动轴;13-5、第一转向驱动桥;13-6、第三传动轴;13-7、第二转向驱动桥;14、增程器;10, frame; 10-1, power battery; 11, engine; 12, generator; 13, drive system; 13-1, drive motor; 13-2, first drive shaft; 13-3, gearbox; 13 -4, the second drive shaft; 13-5, the first steering drive axle; 13-6, the third drive shaft; 13-7, the second steering drive axle; 14, the range extender;
130、油泵;131、转向油缸。130. Oil pump; 131. Steering cylinder.
具体实施方式Detailed ways
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。Below with reference to the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention will be described in further detail, the purpose is to help those skilled in the art to have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and contribute to its implementation.
如图1至图5所示,本发明是一种混动双向行驶无人驾驶矿用自卸车底盘,采用混合动力方案,增程器通过发动机带动发电机工作,采用两组驱动系统,且在车架的两端对称布置;前后双电机驱动,确保车辆动力性的同时保证了车辆较高的续驶里程;实现双向行驶和全轮转向,解决了车辆在狭小空间调头难的问题,同时提升了作业效率和车辆行驶安全性。As shown in Figures 1 to 5, the present invention is a hybrid two-way driving unmanned mining dump truck chassis, which adopts a hybrid scheme, the range extender drives the generator to work through the engine, adopts two sets of driving systems, and The two ends of the frame are arranged symmetrically; the front and rear dual motor drives ensure the power of the vehicle and the high driving range of the vehicle; the two-way driving and all-wheel steering are realized, which solves the problem that the vehicle is difficult to turn around in a narrow space, and at the same time improves the driving range of the vehicle. Improve work efficiency and vehicle driving safety.
具体的说,如图1至图5所示,包括底盘1、自卸车斗2和前后无人驾驶模块3,所述自卸车斗2通过举升油缸与底盘1连接,所述前后无人驾驶模块3与底盘1端部连接。Specifically, as shown in FIG. 1 to FIG. 5 , it includes a chassis 1, a
所述底盘1包括车架10、驱动系统13和增程器14,所述增程器14由发电机12与发动机11组成,所述增程器14与车架10端部连接,所述增程器14通过发动机11带动发电机12工作,所述驱动系统13通过悬架与车架10连接。The chassis 1 includes a
所述驱动系统13设有两组,且在车架10的两端对称布置,所述驱动系统13包括驱动电机13-1、第一传动轴13-2、变速箱13-3、第二传动轴13-4、第一转向驱动桥13-5、第三传动轴13-6和第二转向驱动桥13-7,所述驱动电机13-1和变速箱13-3通过悬置安装在车架10上,所述驱动电机13-1通过第一传动轴13-2与变速箱13-3连接,所述变速箱13-3通过第二传动轴13-4与第一转向驱动桥13-5连接,所述第一转向驱动桥13-5通过第三传动轴13-6与第二转向驱动桥13-7连接。The
所述变速箱13-3前进和倒退档位数相同。The gearbox 13-3 has the same number of forward and reverse gears.
所述车架10两侧对称设有动力电池10-1,且动力电池10-1与发电机12和驱动电机13-1都是电性连接,所述增程器14和动力电池10-1一起给驱动电机13-1供电,所述增程器14给动力电池10-1充电。The
所述第一转向驱动桥13-5和第二转向驱动桥13-7采用转向油缸131进行液压转向,所述发动机11上设有油泵130,且油泵130从发动机11取力驱动转向油缸131运动进行转向。The first steering drive axle 13-5 and the second steering drive axle 13-7 use a
所述前后无人驾驶模块3具体包括融合感知子系统、控制子系统、远程子系统、车交互子系统和执行子系统,所述控制子系统包括自动驾驶控制系统和整车控制器,所述自动驾驶控制系统和整车控制器数据相通连接,所述融合感知子系统与自动驾驶控制系统通过数据信号线连接,所述远程子系统、车交互子系统和执行子系统都与整车控制器连接。The front and rear
所述融合感知子系统包括激光雷达传感器、毫米波雷达传感器、超声波雷达传感器、前视摄像头、环视摄像头和组合导航系统。The fusion perception subsystem includes a lidar sensor, a millimeter-wave radar sensor, an ultrasonic radar sensor, a front-view camera, a surround-view camera, and an integrated navigation system.
所述激光雷达传感器优选四个,分布在车辆的四周。There are preferably four lidar sensors, which are distributed around the vehicle.
所述毫米波雷达传感器优选两个,分布在车辆的前后。There are preferably two millimeter-wave radar sensors, which are distributed in the front and rear of the vehicle.
所述超声波雷达传感器优选十六个,分布在车辆的四周。The ultrasonic radar sensors are preferably sixteen, which are distributed around the vehicle.
所述前视摄像头优选两个,分布在车辆前端。There are preferably two front-view cameras, which are distributed at the front end of the vehicle.
所述环视摄像头优选四个,分布在车辆的四周。There are preferably four surround-view cameras, which are distributed around the vehicle.
所述组合导航系统优选GPS/IMU/INS组成,配合着基站实现全天候、完全自主、不受外界干扰的全导航参数。The integrated navigation system is preferably composed of GPS/IMU/INS, and cooperates with the base station to achieve all-weather, fully autonomous, and full navigation parameters free from external interference.
所述执行子系统分为驱动系统、转向系统、制动系统。The execution subsystem is divided into a driving system, a steering system, and a braking system.
所述交互子系统分为显示屏、灯光系统、语音系统组成。The interactive subsystem is divided into a display screen, a lighting system, and a voice system.
所述远程子系统由T-box、云端服务器、终端系统组成。The remote subsystem consists of a T-box, a cloud server, and a terminal system.
以下用具体实施例对具体工作方式进行阐述:The specific working mode is described below with specific embodiments:
实施例1:Example 1:
本发明的混动双向行驶无人驾驶矿用自卸车底盘,通过前后无人驾驶模块3的测算和控制,在爬坡、坑洼路面等高负荷路况下行驶时,增程器14满负荷工作和动力电池10-1一起给两个驱动电机13-1供能,此时驱动力较大;当在低负荷工况行驶时,根据动力电池10-1电量情况,若电量较高,增程器14低负荷工作,以动力电池10-1为主要供能对象,若电量较低,以增程器14为主要供能对象,若电量低于警戒线,增程器14同时为动力电池10-1充电;当下坡制动时,驱动电机13-1参与制动,将制动能量回馈给动力电池10-1;节能环保的同时,解决了电动车需要频繁充电的问题。The hybrid two-way driving unmanned mining dump truck chassis of the present invention, through the calculation and control of the front and rear
采用混合动力方案,增程器14通过发动机11带动发电机12工作,采用两组驱动系统13,且在车架10的两端对称布置,所述驱动系统13包括驱动电机13-1、第一传动轴13-2、变速箱13-3、第二传动轴13-4、第一转向驱动桥13-5、第三传动轴13-6和第二转向驱动桥13-7,所述驱动电机13-1和变速箱13-3通过悬置安装在车架10上,所述驱动电机13-1通过第一传动轴13-2与变速箱13-3连接,所述变速箱13-3通过第二传动轴13-4与第一转向驱动桥13-5连接,所述第一转向驱动桥13-5通过第三传动轴13-6与第二转向驱动桥13-7连接;前后双电机驱动,确保车辆动力性的同时保证了车辆较高的续驶里程。In the hybrid solution, the
实施例2:Example 2:
本发明的混动双向行驶无人驾驶矿用自卸车底盘,所述变速箱13-3前进和倒退档位数相同,实现双向行驶,无需掉头即可原路返回,提高了生产效率;所述第一转向驱动桥13-5和第二转向驱动桥13-7采用转向油缸131进行液压转向,所述发动机11上设有油泵130,且油泵130从发动机11取力驱动转向油缸131运动进行转向,实现全轮转向,解决了车辆在狭小空间调头难的问题,同时提升了作业效率和车辆行驶安全性。In the hybrid two-way driving unmanned mining dump truck chassis of the present invention, the forward and reverse gears of the gearbox 13-3 are the same, so that two-way driving is realized, and the original road can be returned without turning around, and the production efficiency is improved; The first steering drive axle 13-5 and the second steering drive axle 13-7 use a
实施例3:Example 3:
本发明的混动双向行驶无人驾驶矿用自卸车底盘,采用无人驾驶系统,减少了人力资源,提高了矿用自卸车的出勤效率,节约人力资源。The hybrid bidirectional driving unmanned mining dump truck chassis of the present invention adopts an unmanned system, which reduces human resources, improves the attendance efficiency of the mining dump truck, and saves human resources.
所述前后无人驾驶模块3具体包括融合感知子系统、控制子系统、远程子系统、车交互子系统和执行子系统,所述控制子系统包括自动驾驶控制系统和整车控制器,所述自动驾驶控制系统和整车控制器数据相通连接,所述融合感知子系统与自动驾驶控制系统通过数据信号线连接,所述远程子系统、车交互子系统和执行子系统都与整车控制器连接。The front and rear
自动驾驶控制系统主要根据融合感知子系统中的信号、执行子系统反馈信号以及整车车辆状态信息完成整车自动驾驶指令的下发;整车控制器主要实现整车故障处理、车控功能的实现以及中央网关功能。The automatic driving control system mainly completes the issuance of the automatic driving instructions of the whole vehicle according to the signals in the fusion perception subsystem, the feedback signal of the execution subsystem and the vehicle status information of the vehicle; Implementation as well as the central gateway function.
所述融合感知子系统包括激光雷达传感器、毫米波雷达传感器、超声波雷达传感器、前视摄像头、环视摄像头和组合导航系统。The fusion perception subsystem includes a lidar sensor, a millimeter-wave radar sensor, an ultrasonic radar sensor, a front-view camera, a surround-view camera, and an integrated navigation system.
所述激光雷达传感器优选四个,分布在车辆的四周,主要功能用于高精地图制作、障碍物识别和跟踪。There are preferably four lidar sensors, which are distributed around the vehicle and are mainly used for high-precision map production, obstacle identification and tracking.
所述毫米波雷达传感器优选两个,分布在车辆的前后,主要功能用于中距离交通车辆和行人的检测。There are preferably two millimeter-wave radar sensors, which are distributed in the front and rear of the vehicle, and their main function is to detect medium-distance traffic vehicles and pedestrians.
所述超声波雷达传感器优选十六个,分布在车辆的四周,主要功能用于近距离和低矮障碍物探测,避免车辆周围近距离感知盲区。There are preferably sixteen ultrasonic radar sensors, which are distributed around the vehicle. The main function is to detect short-range and low obstacles, and to avoid blind spots around the vehicle for short-range perception.
所述前视摄像头优选两个,分布在车辆前端;所述环视摄像头优选四个,分布在车辆的四周;主要用于车道线、交通标示牌、红绿灯以及车辆、行人检测。There are preferably two front-view cameras, which are distributed at the front end of the vehicle; preferably four surround-view cameras, which are distributed around the vehicle; they are mainly used for lane lines, traffic signs, traffic lights, and vehicle and pedestrian detection.
所述组合导航系统优选GPS/IMU/INS组成,配合着基站实现全天候、完全自主、不受外界干扰的全导航参数。The integrated navigation system is preferably composed of GPS/IMU/INS, and cooperates with the base station to achieve all-weather, fully autonomous, and full navigation parameters free from external interference.
所述执行子系统分为驱动系统、转向系统、制动系统;驱动系统为串联混动方案,可达到长续航、低功耗、节能环保的目的;转向系统分为前后液压转向,可达到无须掉头、减小转弯半径的目的;制动系统优选气刹制动,制动压力大,提供整车安全。The execution subsystem is divided into a driving system, a steering system, and a braking system; the driving system is a series hybrid scheme, which can achieve the purpose of long battery life, low power consumption, energy saving and environmental protection; the steering system is divided into front and rear hydraulic steering, which can achieve no need The purpose of U-turn and reducing the turning radius; the braking system is preferably air brake, the braking pressure is large, and the safety of the whole vehicle is provided.
所述交互子系统分为显示屏、灯光系统、语音系统组成;实现警示路人、故障报警,车辆状态信息以及车辆调试显示功能。灯光系统优选远近光灯、转向灯、制动灯、故障警示灯、昼间行车灯。The interactive subsystem is composed of a display screen, a lighting system, and a voice system; it realizes the functions of warning passers-by, fault alarm, vehicle status information and vehicle debugging display. The lighting system is preferably high and low beam lights, turn signals, brake lights, fault warning lights, and daytime running lights.
所述远程子系统由T-box、云端服务器、终端系统组成;T-box主要实现整车与云端服务器之间的信息交互,云端服务器接受终端系统信息从而完成整车任务调度,云端服务器可接收整车状态信息完成整车故障诊断;终端系统可满足用户在终端APP界面下完成对整车的控制及状态监控功能。The remote subsystem consists of a T-box, a cloud server and a terminal system; the T-box mainly realizes the information exchange between the vehicle and the cloud server. The cloud server accepts terminal system information to complete vehicle task scheduling, and the cloud server can receive The vehicle status information completes the vehicle fault diagnosis; the terminal system can satisfy the user to complete the vehicle control and status monitoring functions under the terminal APP interface.
以上结合附图对本发明进行了示例性描述,显然,本发明具体实现并不受上述方式的限制,只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。The present invention has been exemplarily described above in conjunction with the accompanying drawings. Obviously, the specific implementation of the present invention is not limited by the above-mentioned manner, as long as various non-substantial improvements are made by adopting the method concept and technical solution of the present invention; or After improvement, it is within the protection scope of the present invention to directly apply the above-mentioned ideas and technical solutions of the present invention to other occasions.
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210177032.3ACN114523838A (en) | 2022-02-25 | 2022-02-25 | A hybrid two-way driving unmanned mining dump truck chassis |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210177032.3ACN114523838A (en) | 2022-02-25 | 2022-02-25 | A hybrid two-way driving unmanned mining dump truck chassis |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114523838Atrue CN114523838A (en) | 2022-05-24 |
Family
ID=81624039
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210177032.3APendingCN114523838A (en) | 2022-02-25 | 2022-02-25 | A hybrid two-way driving unmanned mining dump truck chassis |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114523838A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115946592A (en)* | 2022-08-03 | 2023-04-11 | 内蒙古铱钼智能科技有限公司 | Hybrid power dumper |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110182038A (en)* | 2019-06-11 | 2019-08-30 | 芜湖安佳捷汽车科技有限公司 | A kind of two-way hybrid power three type chassis |
| CN110803009A (en)* | 2019-11-28 | 2020-02-18 | 东风商用车有限公司 | Bidirectional driving electric truck capable of automatically driving |
| CN217863690U (en)* | 2022-02-25 | 2022-11-22 | 芜湖安行时代汽车科技有限公司 | Hybrid bidirectional-driving unmanned mining dump truck chassis |
- 2022
- 2022-02-25CNCN202210177032.3Apatent/CN114523838A/enactivePending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110182038A (en)* | 2019-06-11 | 2019-08-30 | 芜湖安佳捷汽车科技有限公司 | A kind of two-way hybrid power three type chassis |
| CN110803009A (en)* | 2019-11-28 | 2020-02-18 | 东风商用车有限公司 | Bidirectional driving electric truck capable of automatically driving |
| CN217863690U (en)* | 2022-02-25 | 2022-11-22 | 芜湖安行时代汽车科技有限公司 | Hybrid bidirectional-driving unmanned mining dump truck chassis |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115946592A (en)* | 2022-08-03 | 2023-04-11 | 内蒙古铱钼智能科技有限公司 | Hybrid power dumper |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10669694B2 (en) | Electric drive of mobile apparatus | |
| CN113022408B (en) | 360-degree self-adaptive loading and unloading unmanned mining dump truck and control method thereof | |
| CN208216861U (en) | A kind of delivery separation new energy logistic car | |
| CN111516778B (en) | Wheeled mine material delivery robot power chassis | |
| CN105021225A (en) | Greenhouse intelligent and mobile detection platform | |
| CN101456356B (en) | 4-wheel driven articulated tractor trucks | |
| CN108360818A (en) | A kind of tandem type oil electric mixed dynamic jib concrete pump truck | |
| CN207676208U (en) | An unmanned mining wide-body vehicle | |
| CN110803009A (en) | Bidirectional driving electric truck capable of automatically driving | |
| CN111325867A (en) | All-terrain amphibious intelligent inspection device based on V2X communication | |
| CN114889420A (en) | Intelligent driving series-parallel connection type hybrid power tractor topological structure and operation mode | |
| CN217863690U (en) | Hybrid bidirectional-driving unmanned mining dump truck chassis | |
| CN114523838A (en) | A hybrid two-way driving unmanned mining dump truck chassis | |
| CN112758174A (en) | Multi-axis cooperative intelligent transport vehicle and cooperative steering control method thereof | |
| CN201357752Y (en) | 4 wheel driven bowing-type tractor transportation vehicle | |
| CN215244380U (en) | Intelligent automobile charging robot | |
| CN222645787U (en) | Power supply vehicle | |
| CN218750258U (en) | Multifunctional four-wheel logistics vehicle | |
| CN204229228U (en) | A kind of complete unattended control device of intelligent solar automobile | |
| CN113978334B (en) | Wheel-shaft cooperative hybrid unmanned mining dump truck and control method thereof | |
| CN207319068U (en) | A kind of intelligent carriage of omnibearing movable | |
| CN204929107U (en) | Car visualization system | |
| CN211087002U (en) | Modularized unmanned vehicle | |
| CN212373221U (en) | a dump truck | |
| CN218750494U (en) | Multifunctional eight-wheel logistics vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |