CN114521849A - TOF optical system for sweeping robot and sweeping robot - Google Patents
TOF optical system for sweeping robot and sweeping robotDownload PDFInfo
- Publication number
- CN114521849A CN114521849ACN202011308494.1ACN202011308494ACN114521849ACN 114521849 ACN114521849 ACN 114521849ACN 202011308494 ACN202011308494 ACN 202011308494ACN 114521849 ACN114521849 ACN 114521849A
- Authority
- CN
- China
- Prior art keywords
- module
- tof
- cleaning robot
- projection
- optical system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及扫地机器人技术领域,更具体地涉及一种用于扫地机器人的TOF光学系统和扫地机器人。The present invention relates to the technical field of sweeping robots, and more particularly to a TOF optical system for sweeping robots and a sweeping robot.
背景技术Background technique
随着科学技术的飞速发展,扫地机器人也逐渐进入了大众的视野,并且扮演着越来越重要的角色。由于扫地机器人不可避免地遇到避障和/或建图的问题,因此目前市场上的扫地机器人主要通过LDS与VSLAM的方式进行避障或建图,但一方面因LDS价格昂贵而导致现有的扫地机器人价格居高不下,且需要额外配置视觉模块以处理避障问题;另一方面又因VSLAM技术需要被动光照射而导致应用场景被严格限制,且精度较差。With the rapid development of science and technology, sweeping robots have gradually entered the public's field of vision and played an increasingly important role. Since the sweeping robot inevitably encounters obstacle avoidance and/or mapping problems, the current sweeping robots on the market mainly use LDS and VSLAM for obstacle avoidance or mapping. The price of the vacuum cleaner remains high, and an additional vision module is required to deal with the obstacle avoidance problem; on the other hand, the VSLAM technology requires passive light illumination, resulting in strictly limited application scenarios and poor accuracy.
众所周知,由于飞行时间法(Time Of Flight,TOF)是通过测量投射模组发出的脉冲信号从发射到接收的时间间隔t(常被称为脉冲测距法)或激光往返环境目标一次所产生的相位(相位差测距法)来实现对环境目标的三维结构或三维轮廓的测量,因此TOF模组作为一种精度较高的测距仪器,被广泛应用在体感控制、行为分析、监控、自动驾驶、人工智能、机器视觉和自动3D建模等诸多领域。As we all know, because the time of flight (Time Of Flight, TOF) method is generated by measuring the time interval t (often called pulse ranging method) of the pulse signal sent by the projection module from transmission to reception or the laser round trip to the environmental target once Phase (phase difference ranging method) is used to measure the three-dimensional structure or three-dimensional contour of environmental targets. Therefore, TOF module, as a high-precision ranging instrument, is widely used in somatosensory control, behavior analysis, monitoring, automatic Driving, artificial intelligence, machine vision, and automated 3D modeling, among many other fields.
然而,在扫地机器人的投射接收模组实现方案中,目前大多数扫地机器人的TOF模组位于该扫地机器人的上方,并且其在竖直方向(即V方向)上的视场角窗口在水平线以上,使得该视场角窗口位于扫地机器人的上方,这导致扫地机器人对诸如门槛、楼梯等高度较低的地面障碍物无法做出鉴别,进而影响扫地机器人的清扫效果和安全性能;而如果采用在水平线以下的设计,则扫地机器人本身的结构将会挡住投射接收模组所投射的光线,无法准确测距,更无法实现近距离的避障功能,严重影响扫地机器人的工作性能。However, in the realization scheme of the projection receiving module of the sweeping robot, the TOF module of most sweeping robots is located above the sweeping robot, and its field of view window in the vertical direction (ie the V direction) is above the horizontal line , so that the field of view window is located above the sweeping robot, which makes the sweeping robot unable to identify low-height ground obstacles such as thresholds and stairs, which in turn affects the sweeping effect and safety performance of the sweeping robot. If the design is below the horizontal line, the structure of the sweeping robot itself will block the light projected by the projection-receiving module, which cannot accurately measure the distance, and cannot realize the function of close-range obstacle avoidance, which will seriously affect the working performance of the sweeping robot.
发明内容SUMMARY OF THE INVENTION
本发明的一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,其能够解决现有的扫地机器人存在的近距离避障问题。An advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot, which can solve the problem of close-range obstacle avoidance existing in the existing cleaning robot.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统中的TOF模组适于被安装于扫地机器人本体的侧部,有助于实现所述扫地机器人对诸如楼梯、粪便等位置的避障功能。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF module in the TOF optical system is suitable for being installed on the body of the cleaning robot. The side part helps to realize the obstacle avoidance function of the sweeping robot for positions such as stairs and feces.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统的通用性强,能够适用于不同类型的扫地机器人。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF optical system has strong versatility and can be applied to different types of cleaning robots.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统能够替代现有的LDS和VSLAM技术,降低硬件成本,以便在实现避障和/或建图功能的同时,大幅地降低扫地机器人的成本。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF optical system can replace the existing LDS and VSLAM technologies, reducing hardware costs, In order to achieve the function of obstacle avoidance and/or mapping, the cost of the sweeping robot can be greatly reduced.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统能够使扫地机器人摆脱各种应用场景的限制,有助于拓展扫地机器人所适用的应用场景范围。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF optical system can make the cleaning robot get rid of the limitations of various application scenarios, which is helpful for It is used to expand the scope of application scenarios applicable to the sweeping robot.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统的水平视场角大、测距远,以便实现高效建图。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF optical system has a large horizontal field of view and long distance measurement, so as to achieve high efficiency Build a map.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,在本发明的一实施例中,所述TOF光学系统能够实现障碍物的有效像素分辨,以便有效地进行避障操作。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot. In an embodiment of the present invention, the TOF optical system can achieve effective pixel resolution of obstacles, so as to effectively avoid obstacles. malfunction.
本发明的另一优势在于提供一种用于扫地机器人的TOF光学系统和扫地机器人,其中为了达到上述优势,在本发明中不需要采用昂贵的材料或复杂的结构。因此,本发明成功和有效地提供一解决方案,不只提供一简单的用于扫地机器人的TOF光学系统和扫地机器人,同时还增加了所述用于扫地机器人的TOF光学系统和扫地机器人的实用性和可靠性。Another advantage of the present invention is to provide a TOF optical system for a cleaning robot and a cleaning robot, wherein in order to achieve the above advantages, the present invention does not need to use expensive materials or complicated structures. Therefore, the present invention successfully and effectively provides a solution, which not only provides a simple TOF optical system for a cleaning robot and a cleaning robot, but also increases the practicability of the TOF optical system and the cleaning robot for a cleaning robot. and reliability.
为了实现上述至少一优势或其他优点和目的,本发明提供了一种用于扫地机器人的TOF光学系统,包括:In order to achieve at least one of the above advantages or other advantages and purposes, the present invention provides a TOF optical system for a cleaning robot, including:
至少一TOF模组,其中所述至少一TOF模组适于被设置于一扫地机器人本体的侧部,并且每所述TOF模组包括用于投射输出光场的一投射模块和用于接收被反射回的接收光场的一接收模块,其中所述投射模块的垂直投射视场角在8°至44°之间,并且所述投射模块的水平投射视场角大于100°;和At least one TOF module, wherein the at least one TOF module is suitable for being arranged on the side of a sweeping robot body, and each of the TOF modules includes a projection module for projecting an output light field and a projection module for receiving the object. a receiving module that receives the light field reflected back, wherein the vertical projection FOV of the projection module is between 8° and 44°, and the horizontal projection FOV of the projection module is greater than 100°; and
一自动控制系统,其中所述自动控制系统可通信地连接于所述至少一TOF模组,并且所述自动控制系统适于可控制地连接于该扫地机器人本体,用于根据经由所述至少一TOF模组采集的深度信息,自动地控制该扫地机器人本体的运动。An automatic control system, wherein the automatic control system is communicatively connected to the at least one TOF module, and the automatic control system is adapted to be controllably connected to the cleaning robot body, for The depth information collected by the TOF module automatically controls the movement of the robot vacuum cleaner.
根据本发明的一实施例,每所述TOF模组的安装高度在3cm至8cm之间,用于通过所述TOF模组探测与该扫地机器人本体相距20cm至40cm、且自身高度在0.2cm至3cm之间的前方障碍物的深度信息。According to an embodiment of the present invention, the installation height of each TOF module is between 3cm and 8cm, for detecting through the TOF module that the distance from the cleaning robot body is 20cm to 40cm, and the height of itself is between 0.2cm and 0.2cm. Depth information of obstacles ahead between 3cm.
根据本发明的一实施例,每所述TOF模组的所述接收模块的垂直接收视场角大于44°,并且所述接收模块的水平接收视场角大于100°。According to an embodiment of the present invention, the vertical receiving field angle of the receiving module of each TOF module is greater than 44°, and the horizontal receiving field angle of the receiving module is greater than 100°.
根据本发明的一实施例,每所述TOF模组的所述接收模块包括一感光芯片和一镜头组件,其中所述镜头组件被对应地设置于所述感光芯片的感光路径,用于对该接收光场进行整形,其中所述感光芯片的角分辨率大于1pixel/deg。According to an embodiment of the present invention, the receiving module of each TOF module includes a photosensitive chip and a lens assembly, wherein the lens assembly is correspondingly disposed on the photosensitive path of the photosensitive chip, and is used for the photosensitive chip. The received light field is shaped, wherein the angular resolution of the photosensitive chip is greater than 1 pixel/deg.
根据本发明的一实施例,每所述TOF模组的所述接收模块的所述镜头组件的焦距与有效口径之比小于1.4。According to an embodiment of the present invention, the ratio of the focal length to the effective aperture of the lens assembly of the receiving module of each TOF module is less than 1.4.
根据本发明的一实施例,所述投射模组包括一光源模块和一衍射光学元件,其中所述衍射光学元件设于所述光源模块的发射路径,用于对所述光源模块发射的输入光场进行整形,以形成该输出光场。According to an embodiment of the present invention, the projection module includes a light source module and a diffractive optical element, wherein the diffractive optical element is disposed on the emission path of the light source module, and is used for input light emitted by the light source module The field is shaped to form this output light field.
根据本发明的一实施例,所述自动控制系统包括相互可通信地连接的一获取模块、一处理模块以及一控制模块,其中所述获取模块可通信地连接所述TOF模组,用于获取经由所述TOF模组探测周围环境以得到的深度数据;其中所述处理模块用于处理来自所述获取模块的所述深度数据,以得到该扫地机器人本体的周围环境信息;其中所述控制模块用于根据该周围环境信息,发送控制信号至该扫地机器人本体以控制该扫地机器人本体的运动。According to an embodiment of the present invention, the automatic control system includes an acquisition module, a processing module and a control module that are communicatively connected to each other, wherein the acquisition module is communicatively connected to the TOF module for acquiring Depth data obtained by detecting the surrounding environment through the TOF module; wherein the processing module is used to process the depth data from the acquisition module to obtain the surrounding environment information of the cleaning robot body; wherein the control module It is used for sending a control signal to the cleaning robot body according to the surrounding environment information to control the movement of the cleaning robot body.
根据本发明的一实施例,所述控制模块包括相互可通信地连接的一距离判断模块、一高度判断模块以及一控制信号生成模块,其中所述距离判断模块用于判断前方障碍物与该扫地机器人本体之间的距离是否小于一避障距离阈值,以得到距离判断结果;其中所述高度判断模块用于响应于该距离判断结果为真,判断该前方障碍物的自身高度是否大于第一避障高度阈值且该前方障碍物的悬空高度是否小于第二避障高度阈值,以得到高度判断结果;其中所述控制信号生成模块用于响应于所述高度判断结果为真,生成该控制信号,使得该扫地机器人基于该控制信号进行相应的避障操作。According to an embodiment of the present invention, the control module includes a distance judging module, a height judging module and a control signal generating module that are communicably connected to each other, wherein the distance judging module is used to judge the obstacle ahead and the sweeping Whether the distance between the robot bodies is less than an obstacle avoidance distance threshold to obtain a distance judgment result; wherein the height judgment module is used to judge whether the height of the front obstacle is greater than the first avoidance result in response to the distance judgment result being true. obstacle height threshold and whether the suspended height of the obstacle in front is less than the second obstacle avoidance height threshold to obtain a height judgment result; wherein the control signal generation module is used to generate the control signal in response to the height judgment result being true, The cleaning robot is made to perform corresponding obstacle avoidance operations based on the control signal.
根据本发明的一实施例,所述第一避障高度阈值根据该扫地机器人本体的越障高度进行设计,并且所述第二避障高度阈值根据该扫地机器人本体的自身高度进行设计。According to an embodiment of the present invention, the first obstacle avoidance height threshold is designed according to the obstacle clearance height of the cleaning robot body, and the second obstacle avoidance height threshold is designed according to the own height of the cleaning robot body.
根据本发明的另一方面,本申请的一实施例进一步提供了一扫地机器人,包括:According to another aspect of the present invention, an embodiment of the present application further provides a cleaning robot, including:
一扫地机器人本体;和A sweeping robot body; and
一TOF光学系统,其中所述TOF光学系统包括:A TOF optical system, wherein the TOF optical system includes:
至少一TOF模组,其中所述至少一TOF模组被设置于所述扫地机器人本体的侧部,并且每所述TOF模组包括用于投射输出光场的一投射模块和用于接收被反射回的接收光场的一接收模块,其中所述投射模块的垂直投射视场角在8°至44°之间,并且所述投射模块的水平投射视场角大于100°;和At least one TOF module, wherein the at least one TOF module is arranged on the side of the cleaning robot body, and each of the TOF modules includes a projection module for projecting an output light field and a projection module for receiving the reflected light field. a receiving module for receiving the light field, wherein the vertical projection field of view of the projection module is between 8° and 44°, and the horizontal projection field of view of the projection module is greater than 100°; and
一自动控制系统,其中所述自动控制系统可通信地连接于所述至少一TOF模组,并且所述自动控制系统可控制地连接于所述扫地机器人本体,用于根据经由所述至少一TOF模组采集的深度信息,自动地控制所述扫地机器人本体的运动。An automatic control system, wherein the automatic control system is communicatively connected to the at least one TOF module, and the automatic control system is controllably connected to the cleaning robot body, for The depth information collected by the module automatically controls the movement of the cleaning robot body.
通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体现。Further objects and advantages of the present invention will be fully realized by an understanding of the ensuing description and drawings.
本发明的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。These and other objects, features and advantages of the present invention are fully embodied by the following detailed description, drawings and claims.
附图说明Description of drawings
图1是根据本发明的一实施例的扫地机器人的结构示意图。FIG. 1 is a schematic structural diagram of a cleaning robot according to an embodiment of the present invention.
图2是根据本发明的一实施例的用于扫地机器人的TOF光学系统的框图示意图。FIG. 2 is a schematic block diagram of a TOF optical system for a cleaning robot according to an embodiment of the present invention.
图3示出了根据本发明的上述实施例的所述TOF光学系统中TOF模组的系统示意图。FIG. 3 shows a system schematic diagram of the TOF module in the TOF optical system according to the above-mentioned embodiment of the present invention.
图4示出了根据本发明的上述实施例的所述用于扫地机器人的TOF光学系统的一个示例。FIG. 4 shows an example of the TOF optical system for a cleaning robot according to the above-mentioned embodiment of the present invention.
图5示出了根据本发明的上述实施例的所述用于扫地机器人的TOF光学系统的另一个示例。FIG. 5 shows another example of the TOF optical system for a cleaning robot according to the above-mentioned embodiment of the present invention.
具体实施方式Detailed ways
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。The following description serves to disclose the invention to enable those skilled in the art to practice the invention. The preferred embodiments described below are given by way of example only, and other obvious modifications will occur to those skilled in the art. The basic principles of the invention defined in the following description may be applied to other embodiments, variations, improvements, equivalents, and other technical solutions without departing from the spirit and scope of the invention.
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。It should be understood by those skilled in the art that in the disclosure of the present invention, the terms "portrait", "horizontal", "upper", "lower", "front", "rear", "left", "right", " The orientation or positional relationship indicated by vertical, horizontal, top, bottom, inner, outer, etc. is based on the orientation or positional relationship shown in the accompanying drawings, which are only for the convenience of describing the present invention and The description is simplified rather than indicating or implying that the device or element referred to must have a particular orientation, be constructed and operate in a particular orientation, and thus the above terms should not be construed as limiting the invention.
在本发明中,权利要求和说明书中术语“一”应理解为“一个或多个”,即在一个实施例,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个。除非在本发明的揭露中明确示意该元件的数量只有一个,否则术语“一”并不能理解为唯一或单一,术语“一”不能理解为对数量的限制。In the present invention, the term "a" in the claims and the description should be understood as "one or more", that is, in one embodiment, the number of an element may be one, and in another embodiment, the number of the element may be one Can be multiple. Unless it is clearly indicated in the disclosure of the present invention that the number of the element is only one, the term "a" should not be construed as unique or single, and the term "a" should not be construed as a limitation on the number.
在本发明的描述中,需要理解的是,属于“第一”、“第二”等仅用于描述目的,而不能理解为指示或者暗示相对重要性。本发明的描述中,需要说明的是,除非另有明确的规定和限定,属于“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接或者一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以是通过媒介间接连结。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。In the description of the present invention, it should be understood that references to "first", "second", etc. are only for descriptive purposes, and should not be construed as indicating or implying relative importance. In the description of the present invention, it should be noted that, unless otherwise expressly specified and limited, “connected” and “connected” should be understood in a broad sense, for example, it may be a fixed connection, a detachable connection or an integral connection ; It can be a mechanical connection or an electrical connection; it can be a direct connection or an indirect connection through a medium. For those of ordinary skill in the art, the specific meanings of the above terms in the present invention can be understood according to specific situations.
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。In the description of this specification, description with reference to the terms "one embodiment," "some embodiments," "example," "specific example," or "some examples", etc., mean specific features described in connection with the embodiment or example , structure, material or feature is included in at least one embodiment or example of the present invention. In this specification, schematic representations of the above terms are not necessarily directed to the same embodiment or example. Furthermore, the particular features, structures, materials or characteristics described may be combined in any suitable manner in any one or more embodiments or examples. Furthermore, those skilled in the art may combine and combine the different embodiments or examples described in this specification, as well as the features of the different embodiments or examples, without conflicting each other.
随着扫地机器人的应用场景越来越复杂,人们对扫地机器人的期望也越来越高。例如,针对复式或阁楼式房间,人们期望扫地机器人能够自动识别诸如楼梯等障碍物,并能够自动避障。但目前大多数扫地机器人的投射接收模组位于该扫地机器人的上方,并且其在竖直方向上的视场角窗口在水平线以上,使得该视场角窗口位于扫地机器人的上方,这导致扫地机器人对诸如门槛、楼梯等地面障碍物无法做出鉴别,进而影响扫地机器人的清扫效果和安全性能。而如果采用在水平线以下的设计,则扫地机器人本身的结构将会挡住投射接收模组所投射的光线,无法准确测距,甚至会导致该扫地机器人无法正常工作。因此,本发明提供了一种新的实现方案以解决上述问题。As the application scenarios of sweeping robots become more and more complex, people's expectations for sweeping robots are also getting higher and higher. For example, for duplex or loft-style rooms, it is expected that the sweeping robot can automatically identify obstacles such as stairs, and can automatically avoid obstacles. But at present, the projection receiving module of most cleaning robots is located above the cleaning robot, and its field of view window in the vertical direction is above the horizontal line, so that the field of view window is located above the cleaning robot, which leads to the cleaning robot. It is impossible to identify ground obstacles such as thresholds and stairs, which in turn affects the cleaning effect and safety performance of the sweeping robot. However, if the design below the horizontal line is adopted, the structure of the sweeping robot itself will block the light projected by the projection-receiving module, unable to measure the distance accurately, and even cause the sweeping robot to fail to work normally. Therefore, the present invention provides a new implementation solution to solve the above problems.
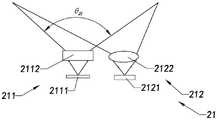
参考附图之图1至图5所示,根据本发明的一实施例的用于扫地机器人的TOF光学系统被阐明。具体地,如图1至图5所示,所述扫地机器人1包括一扫地机器人本体10和一TOF光学系统20,其中所述TOF光学系统20可以包括至少一TOF模组21和一自动控制系统22。所述TOF模组21适于被设置于扫地机器人本体10的侧部,并且所述TOF模组21包括用于投射输出光场的一投射模块211和用于接收被反射回的接收光场的一接收模块212,其中所述TOF模组21的所述投射模块211的垂直投射视场角θV在8°至44°之间,并且所述TOF模组21的所述投射模块211的水平投射视场角θH大于100°。所述自动控制系统21可通信地连接于所述TOF模组21,并且所述自动控制系统21适于可控制地连接于所述扫地机器人本体10,用于根据经由所述TOF模组21采集的深度信息,自动地控制所述扫地机器人本体10的运动。可以理解的是,所述接收模块212的所述接收光场为所述输出光场在视场目标(如障碍物)处发生反射后被所述接收模块212接收到的光场。Referring to FIGS. 1 to 5 of the accompanying drawings, a TOF optical system for a cleaning robot according to an embodiment of the present invention is illustrated. Specifically, as shown in FIGS. 1 to 5 , the cleaning robot 1 includes a
值得注意的是,由于本申请的所述TOF光学系统20中的所述TOF模组21被设置于所述扫地机器人本体10的侧部,并且所述TOF模组21的所述投射模块211的所述垂直投射视场角在8°至44°之间,使得所述TOF模组21的所述投射模块211能够将输出光场投射到水平线以下的位置,有助于通过所述TOF模组21对诸如门槛、楼梯等高度较低的地面障碍物做出鉴别,因此本申请的所述自动控制系统21能够基于经由所述TOF模组21采集的深度信息来控制所述扫地机器人本体10的运动,以实现所述扫地机器人的近距离避障。与此同时,由于本申请的所述TOF光学系统20中的所述TOF模组21的所述投射模块211的所述水平投射视场角大于100°,使得所述TOF模组21能够尽可能多地探测所述扫地机器人本体10周围的环境,因此本申请的所述TOF光学系统20能够基于经由所述TOF模组21采集的深度信息进行高效的建图,以便在解决现有的扫地机器人存在无法解决近距离避障问题的同时,还能够进行高效率地建图,以便满足扫地机器人对避障和SLAM的需求。It is worth noting that, because the
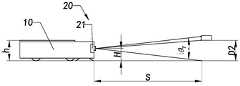
更具体地,如图3和图4所示,所述TOF光学系统20的所述TOF模组21的安装高度H在3cm至8cm之间,用于通过所述TOF模组21探测与所述扫地机器人本体10之间的距离S在20cm至40cm之间、且自身高度D1在0.2cm至3cm之间的前方障碍物的深度信息,使得所述TOF光学系统20的所述自动控制系统22能够根据经由所述TOF模组21探测到的深度信息来提前控制所述扫地机器人本体10的运动,便于实现近距离的自动避障效果。可以理解的是,本申请中所述TOF模组21的安装高度H可以指的是所述TOF模组21的所述投射模块211的光心与所述扫地机器人本体10的运动基面(如所述扫地机器人本体10中多个轮子与平整地面的接触点所在的平面)之间的距离。More specifically, as shown in FIG. 3 and FIG. 4 , the installation height H of the
优选地,所述TOF光学系统20的所述TOF模组21的所述接收模块212的垂直接收视场角大于44°,并且所述接收模块212的水平接收视场角大于100°,使得所述TOF模组21的所述接收模块212的所述接收光场能够全方位地覆盖所述投射模块211的所述输出光场,以确保所述TOF模组21的所述投射模块211投射的照明光在被诸如障碍物等环境目标反射以形成反射光后,该反射光能够被所述TOF模组21的所述接收模块212接收以获得对应的深度信息,有助于提高所述TOF模组21的探测能力。Preferably, the vertical receiving field angle of the receiving
示例性地,所述投射模块211的水平投射视场角θH可以但不限于被实施为120°,且所述投射模块211的垂直投射视场角θV可以但不限于被实施为8°。此时,所述投射模块211的所述输出光场将在环境目标的表面形成一条窄带状光斑(即线性光斑),这样较大的水平投射视场角能够确保所述扫地机器人1获得很大的水平测距范围,而较小的垂直投射视场角又能够减小地面反射而提高所述TOF模组21的探测精度。Exemplarily, the horizontal projection angle of view θH of the
根据本发明的上述实施例,如图2和图3所示,所述TOF模组21的所述投射模块211可以包括一光源模块2111和一衍射光学元件2112,其中所述光源模块2111用于发射输入光场,其中所述衍射光学元件2112被对应地设置于所述光源模块2111的发射路径,用于对所述输入光场的光强分布进行整形,以得到所需输出的所述输出光场。可以理解的是,所述输入光场的光强分布形式与所述光源模块2111有关,因此在这里只需要确定所述输出光场的光强分布形式,就可以通过光学设计技术来设计出所需的衍射光学元件2112。例如,当所述光源模块2111发射的所述输入光场和所述投射模块211投射的所述输出光场已知时,可采用各种已有技术来制造出相应的所述衍射光学元件,本发明对此不再赘述。According to the above embodiments of the present invention, as shown in FIG. 2 and FIG. 3 , the
值得注意的是,在本发明的这个实施例中,所述光源模块2111可以但不限于被实施为竖直腔面发射激光器(Vertical Cavity Surface Emitting Laser,简称VCSEL)。与此同时,所述衍射光学元件2112可以但不限于被实施为线性Diffuser。It should be noted that, in this embodiment of the present invention, the
此外,虽然所述投射模块211在垂直方向上的视场角度越小,且模糊区域越小,则所述输出光场的总光强就越集中,所述TOF模组21的测量距离就可以做到越远,但所述投射模块211的所述输出光场在垂直方向上的视场角度还需要考虑超低的地面障碍物会因阻挡所述扫地机器人1的底部而导致所述扫地机器人1无法越过和稍高的悬空障碍物会因阻挡所述扫地机器人1的顶部而导致所述扫地机器人1无法穿过,而这些障碍物都需要本申请的所述TOF模组21提前探测到,因此本申请的所述TOF模组21的所述投射模块211的所述输出光场中的上边缘光线和下边缘光线与水平面的夹角分别为正角度和负角度,使得所述投射模块211的所述输出光场即能够投射到稍高的悬空障碍物表面,又能够投射到超低的底面障碍物表面,以便为所述扫地机器人1的自动避障提供全面的深度信息。In addition, although the angle of the field of view of the
优选地,如图4和图5所示,所述TOF模组21的所述投射模块211的所述输出光场中的上边缘光线与水平面之间的夹角等于所述输出光场中下边缘光线与水平面之间的夹角,即所述投射模块211的所述输出光场中的中心光线平行于所述水平面,以便同时兼顾对所述底面障碍物和所述悬空障碍物的探测。Preferably, as shown in FIG. 4 and FIG. 5 , the angle between the upper edge ray in the output light field of the
根据本发明的这个实施例,如图2和图3所示,所述TOF模组21的所述接收模块212可以包括一感光芯片2121和一镜头组件2122,其中所述镜头组件2122被设置于所述感光芯片2121的感光路径,用于对所述接收光场进行整形,以便被所述感光芯片2121接收。According to this embodiment of the present invention, as shown in FIG. 2 and FIG. 3 , the receiving
具体地,在本发明的这个实施例中,所述TOF模组21的所述接收模块212中的所述感光芯片2121和所述镜头组件2122被搭配地设计,使得所述接收模块212的所述感光芯片2121的角分辨率应大于1像素每度(即1pixel/deg),以实现所述TOF模组21对与所述扫地机器人本体10相距20cm至40cm、且自身高度D1在0.2cm至3cm之间的障碍物的有效分辨。Specifically, in this embodiment of the present invention, the
优选地,所述TOF模组21的所述接收模块212的所述镜头组件2122的焦距与有效口径之比小于1.4(即FNO.<1.4),以确保所述TOF模组21能够实现7m的探测距离。Preferably, the ratio of the focal length to the effective aperture of the
值得一提的是,为了实现所述扫地机器人1的自动避障,如图2所示,本申请的所述TOF光学系统20的所述自动控制系统22可以包括相互可通信地连接的一获取模块221、一处理模块222以及一控制模块223,其中所述获取模块221可通信地连接于所述TOF模组21,用于获取经由所述TOF模组21探测周围环境以得到的深度数据;其中所述处理模块222用于处理来自所述获取模块221的所述深度数据,以得到所述扫地机器人本体10的周围环境信息;其中所述控制模块223用于根据所述周围环境信息,发送控制信号至所述扫地机器人本体10以控制所述扫地机器人本体10的运动,从而有效地实现相应的避障效果。It is worth mentioning that, in order to realize the automatic obstacle avoidance of the cleaning robot 1, as shown in FIG. 2, the automatic control system 22 of the TOF
更具体地,如图4和图5所示,所述扫地机器人本体10的周围环境信息可以包括前方障碍物与所述扫地机器人本体10之间的距离、所述前方障碍物的自身高度D1和悬空高度D2。可以理解的是,本申请的所述前方障碍物指的是位于所述扫地机器人1行驶方向上的障碍物。此外,所述前方障碍物可以为地面障碍物(如图4所示,位于地面且可能会阻挡所述扫地机器人1越过的障碍物,如门槛或台阶等)和悬空障碍物(如图5所示,悬空于地面且可能会阻挡所述扫地机器人1穿过的障碍物,如柜底或桌底等)。More specifically, as shown in FIG. 4 and FIG. 5 , the surrounding environment information of the cleaning
示例性地,如图2所示,所述自动控制系统22的所述控制模块223可以包括相互可通信地里连接的一距离判断模块2231、一高度判断模块2232以及一控制信号生成模块2233,其中所述距离判断模块2231用于判断所述前方障碍物与所述扫地机器人本体10之间的距离是否小于一避障距离阈值,以得到距离判断结果;其中所述高度判断模块2232用于响应于所述距离判断结果为真(即所述前方障碍物与所述扫地机器人本体10之间的距离S小于所述避障距离阈值),判断所述前方障碍物的自身高度D1是否大于第一避障高度阈值且所述前方障碍物的悬空高度D2是否小于第二避障高度阈值,以得到高度判断结果;其中所述控制信号生成模块2233用于响应于所述高度判断结果为真(即所述前方障碍物的自身高度D1大于所述第一避障高度阈值且所述前方障碍物的悬空高度D2小于所述第二避障高度阈值),生成所述控制信号,使得所述扫地机器人本体10基于所述控制信号进行相应的避障操作。Exemplarily, as shown in FIG. 2, the control module 223 of the automatic control system 22 may include a distance judging module 2231, a height judging module 2232 and a control signal generating module 2233 that are communicably connected to each other, The distance judging module 2231 is used for judging whether the distance between the front obstacle and the cleaning robot body 10 is less than an obstacle avoidance distance threshold, so as to obtain the distance judgment result; wherein the height judging module 2232 is used for responding When the distance judgment result is true (that is, the distance S between the front obstacle and the cleaning robot body 10 is smaller than the obstacle avoidance distance threshold), it is judged whether the height D1 of the front obstacle is greater than the first Obstacle avoidance height threshold and whether the suspended height D2 of the front obstacle is less than the second obstacle avoidance height threshold to obtain a height judgment result; wherein the control signal generation module 2233 is used to respond to the height judgment result being true (ie The self-height D1 of the front obstacle is greater than the first obstacle avoidance height threshold and the suspended height D2 of the front obstacle is less than the second obstacle avoidance height threshold), and the control signal is generated to make the sweeping robot The main body 10 performs a corresponding obstacle avoidance operation based on the control signal.
值得注意的是,本申请的所述避障距离阈值可以但不限于根据所述扫地机器人本体10的行驶速度进行正向设计,即当所述扫地机器人本体10的行驶速度较大时,所述避障距离阈值也较大;当所述扫地机器人本体10的行驶速度较小时,所述避障距离阈值也较小。例如,所述避障距离阈值的范围可以但不限于被实施为20cm至40cm。It is worth noting that the obstacle avoidance distance threshold of the present application can be, but is not limited to, a forward design according to the driving speed of the cleaning
此外,本申请的所述第一避障高度阈值可以根据所述扫地机器人本体10的越障高度进行设计,只要确保所述扫地机器人本体10能够越过自身高度D1低于所述第一避障高度阈值的障碍物即可。例如,所述第一避障高度阈值可以但不限于为0.5cm。In addition, the first obstacle avoidance height threshold of the present application can be designed according to the obstacle clearance height of the cleaning
同理地,本申请的所述第二避障高度阈值可以根据所述扫地机器人本体10的自身高度h进行设计,只要确保所述扫地机器人本体10能够穿过悬空高度D2高于所述第二避障高度阈值的障碍物即可。例如,所述第二避障高度阈值可以但不限于为10cm。Similarly, the second obstacle avoidance height threshold of the present application can be designed according to the height h of the cleaning
本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。It should be understood by those skilled in the art that the embodiments of the present invention shown in the above description and the accompanying drawings are only examples and do not limit the present invention. The objects of the present invention have been fully and effectively achieved. The functional and structural principles of the present invention have been shown and described in the embodiments, and the embodiments of the present invention may be modified or modified in any way without departing from the principles.
Claims (10)
Translated fromChinesePriority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011308494.1ACN114521849A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
| CN202310600800.6ACN118161087A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011308494.1ACN114521849A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310600800.6ADivisionCN118161087A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114521849Atrue CN114521849A (en) | 2022-05-24 |
Family
ID=81618543
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310600800.6APendingCN118161087A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
| CN202011308494.1APendingCN114521849A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310600800.6APendingCN118161087A (en) | 2020-11-20 | 2020-11-20 | TOF optical system for sweeping robot and sweeping robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (2) | CN118161087A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115267825A (en)* | 2022-06-24 | 2022-11-01 | 奥比中光科技集团股份有限公司 | Obstacle avoidance and navigation method, device and storage medium for sweeper based on TOF sensor |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150253777A1 (en)* | 2014-02-10 | 2015-09-10 | Savioke Inc. | Sensor configurations and methods for mobile robot |
| CN206411269U (en)* | 2016-10-25 | 2017-08-15 | 深圳市镭神智能系统有限公司 | A kind of multi-line laser radar range-measurement system |
| CN108549089A (en)* | 2018-03-27 | 2018-09-18 | 深圳市智能机器人研究院 | A kind of hollow out obstacle detector and method for SLAM |
| CN108784540A (en)* | 2018-06-29 | 2018-11-13 | 炬大科技有限公司 | A kind of sweeping robot automatic obstacle-avoiding moving device and mode of progression |
| CN109214348A (en)* | 2018-09-19 | 2019-01-15 | 北京极智嘉科技有限公司 | A kind of obstacle detection method, device, equipment and storage medium |
| CN109901134A (en)* | 2017-12-08 | 2019-06-18 | 浙江舜宇智能光学技术有限公司 | Wide-angle TOF module and its application |
| CN109917420A (en)* | 2019-02-27 | 2019-06-21 | 科沃斯商用机器人有限公司 | A kind of automatic travelling device and robot |
| CN110187594A (en)* | 2019-05-27 | 2019-08-30 | 上海鲲游光电科技有限公司 | A linear light field projector |
| EP3549726A2 (en)* | 2016-11-30 | 2019-10-09 | Yujin Robot Co., Ltd. | Robotic vacuum cleaner, cleaning function control apparatus equipped in robotic vacuum cleaner, and multi-channel lidar-based obstacle detection apparatus equipped in robotic vacuum cleaner |
| CN210402103U (en)* | 2019-11-15 | 2020-04-24 | 北京迈格威科技有限公司 | Obstacle detection systems and automated guided vehicles |
| CN111374592A (en)* | 2018-12-27 | 2020-07-07 | 余姚舜宇智能光学技术有限公司 | A TOF module for sweeping robot and sweeping robot |
| CN111496845A (en)* | 2020-04-29 | 2020-08-07 | 宁波溪棠信息科技有限公司 | Installation method of TOF module for robot |
| CN111624997A (en)* | 2020-05-12 | 2020-09-04 | 珠海市一微半导体有限公司 | Robot control method and system based on TOF camera module and robot |
| US20200301010A1 (en)* | 2019-03-19 | 2020-09-24 | Ricoh Company, Ltd. | Distance measurement apparatus and distance measurement method |
| CN211559963U (en)* | 2019-12-20 | 2020-09-25 | 深圳市杉川机器人有限公司 | Autonomous robot |
| WO2020224782A1 (en)* | 2019-05-09 | 2020-11-12 | Aktiebolaget Electrolux | Detecting objects using a line array |
- 2020
- 2020-11-20CNCN202310600800.6Apatent/CN118161087A/enactivePending
- 2020-11-20CNCN202011308494.1Apatent/CN114521849A/enactivePending
Patent Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150253777A1 (en)* | 2014-02-10 | 2015-09-10 | Savioke Inc. | Sensor configurations and methods for mobile robot |
| CN206411269U (en)* | 2016-10-25 | 2017-08-15 | 深圳市镭神智能系统有限公司 | A kind of multi-line laser radar range-measurement system |
| EP3549726A2 (en)* | 2016-11-30 | 2019-10-09 | Yujin Robot Co., Ltd. | Robotic vacuum cleaner, cleaning function control apparatus equipped in robotic vacuum cleaner, and multi-channel lidar-based obstacle detection apparatus equipped in robotic vacuum cleaner |
| CN109901134A (en)* | 2017-12-08 | 2019-06-18 | 浙江舜宇智能光学技术有限公司 | Wide-angle TOF module and its application |
| CN108549089A (en)* | 2018-03-27 | 2018-09-18 | 深圳市智能机器人研究院 | A kind of hollow out obstacle detector and method for SLAM |
| CN108784540A (en)* | 2018-06-29 | 2018-11-13 | 炬大科技有限公司 | A kind of sweeping robot automatic obstacle-avoiding moving device and mode of progression |
| CN109214348A (en)* | 2018-09-19 | 2019-01-15 | 北京极智嘉科技有限公司 | A kind of obstacle detection method, device, equipment and storage medium |
| CN111374592A (en)* | 2018-12-27 | 2020-07-07 | 余姚舜宇智能光学技术有限公司 | A TOF module for sweeping robot and sweeping robot |
| CN109917420A (en)* | 2019-02-27 | 2019-06-21 | 科沃斯商用机器人有限公司 | A kind of automatic travelling device and robot |
| US20200301010A1 (en)* | 2019-03-19 | 2020-09-24 | Ricoh Company, Ltd. | Distance measurement apparatus and distance measurement method |
| WO2020224782A1 (en)* | 2019-05-09 | 2020-11-12 | Aktiebolaget Electrolux | Detecting objects using a line array |
| CN110187594A (en)* | 2019-05-27 | 2019-08-30 | 上海鲲游光电科技有限公司 | A linear light field projector |
| CN210402103U (en)* | 2019-11-15 | 2020-04-24 | 北京迈格威科技有限公司 | Obstacle detection systems and automated guided vehicles |
| CN211559963U (en)* | 2019-12-20 | 2020-09-25 | 深圳市杉川机器人有限公司 | Autonomous robot |
| CN111496845A (en)* | 2020-04-29 | 2020-08-07 | 宁波溪棠信息科技有限公司 | Installation method of TOF module for robot |
| CN111624997A (en)* | 2020-05-12 | 2020-09-04 | 珠海市一微半导体有限公司 | Robot control method and system based on TOF camera module and robot |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115267825A (en)* | 2022-06-24 | 2022-11-01 | 奥比中光科技集团股份有限公司 | Obstacle avoidance and navigation method, device and storage medium for sweeper based on TOF sensor |
| WO2023245906A1 (en)* | 2022-06-24 | 2023-12-28 | 奥比中光科技集团股份有限公司 | Tof sensor-based sweeping robot obstacle avoidance and navigation method and apparatus, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN118161087A (en) | 2024-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11821987B2 (en) | Multiple resolution, simultaneous localization and mapping based on 3-D LIDAR measurements | |
| CN109917420B (en) | Automatic walking device and robot | |
| US9182763B2 (en) | Apparatus and method for generating three-dimensional map using structured light | |
| CN107966989A (en) | A kind of robot autonomous navigation system | |
| CN109917788B (en) | A control method and device for a robot walking along a wall | |
| KR20180064969A (en) | RIDAR Apparatus Based on Time of Flight and Moving Object | |
| KR20180061949A (en) | Obstacle Sensing Apparatus and Method for Multi-Channels Based Mobile Robot, Mobile Robot including the same | |
| CN106568432B (en) | Mobile robot initial pose acquisition method and system | |
| US20230065210A1 (en) | Optical distance measuring device | |
| CN106289232A (en) | A robot obstacle avoidance method based on depth sensor | |
| TW201932868A (en) | Rain filtering techniques for autonomous vehicle | |
| CN207965645U (en) | A kind of robot autonomous navigation system | |
| CN106872961A (en) | An optical lens, an optical ranging device, a ranging method, and a ranging system | |
| CN115267825A (en) | Obstacle avoidance and navigation method, device and storage medium for sweeper based on TOF sensor | |
| KR101840628B1 (en) | Omnidirectional obstacle detection apparatus, autonomous driving robot using it and omnidirectional obstacle detection method of autonomous driving robot | |
| CN114521849A (en) | TOF optical system for sweeping robot and sweeping robot | |
| CN116129669A (en) | A method, system, device and medium for evaluating a parking space based on laser radar | |
| WO2023083198A1 (en) | Echo signal processing method and apparatus, device, and storage medium | |
| CN107202993A (en) | Cascaded acousto-optic wide-field laser 3D imaging system based on full waveform sampling | |
| CN118405130B (en) | A method, system and medium for off-road environment perception and tracking and guiding vehicles | |
| CN210090677U (en) | A laser positioning device | |
| CN110109147A (en) | Laser positioning device and laser positioning method using same | |
| CN117169848A (en) | Method for filtering glass noise, laser radar and robot | |
| CN110456327A (en) | Laser radar reception device and laser radar system | |
| CN210294530U (en) | Automatic walking device and robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20220524 |