CN114499624A - Multi-source data fusion processing method and system in heaven-earth integrated information network - Google Patents
Multi-source data fusion processing method and system in heaven-earth integrated information networkDownload PDFInfo
- Publication number
- CN114499624A CN114499624ACN202111495136.0ACN202111495136ACN114499624ACN 114499624 ACN114499624 ACN 114499624ACN 202111495136 ACN202111495136 ACN 202111495136ACN 114499624 ACN114499624 ACN 114499624A
- Authority
- CN
- China
- Prior art keywords
- task
- network
- module
- graph
- execution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/1851—Systems using a satellite or space-based relay
- H04B7/18519—Operations control, administration or maintenance
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/1851—Systems using a satellite or space-based relay
- H04B7/18513—Transmission in a satellite or space-based system
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L69/00—Network arrangements, protocols or services independent of the application payload and not provided for in the other groups of this subclass
- H04L69/30—Definitions, standards or architectural aspects of layered protocol stacks
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Computer Security & Cryptography (AREA)
- Data Exchanges In Wide-Area Networks (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及任务处理、数据传输领域,具体地,涉及天地一体化信息网络中多源数据融合处理方法及系统,更为具体地,涉及软件定义天地一体化网络中多源数据融合处理方法及系统。The invention relates to the fields of task processing and data transmission, in particular, to a method and system for multi-source data fusion processing in a sky-earth integrated information network, and more particularly, to a method and system for multi-source data fusion processing in a software-defined space-earth integrated network .
背景技术Background technique
天地一体化信息网络是一个综合了天基和地基网络的庞大而复杂的网络架构,其中天基网络主要由运行在不同轨道的各类卫星(通信卫星、遥感卫星和导航卫星等)和多种近地飞行器组成,地基网络主要由地面互联网和移动通信网组成。天地一体化的主要目标是为全球用户提供低延时、高带宽的通信服务,实现全球跨时空网络的互联互通,优化网络资源的使用。The space-ground integrated information network is a huge and complex network architecture that integrates space-based and ground-based networks. The space-based network is mainly composed of various satellites (communication satellites, remote sensing satellites and navigation satellites, etc.) It is composed of near-earth aircraft, and the ground-based network is mainly composed of ground Internet and mobile communication network. The main goal of the integration of space and earth is to provide global users with low-latency, high-bandwidth communication services, realize the interconnection of global networks across time and space, and optimize the use of network resources.
软件定义网络技术是一种新兴的网络管理方法,可实现动态、高效的网络配置,改善整个网络的性能。传统网络的静态体系结构分散且复杂,而对于所有网络来说,都需要更强的灵活性和更容易的控制方法,SDN通过将网络数据包(数据平面)的转发过程与路由决策过程(控制平面)分离,来将网络智能集中在一个网络组件中。天地网采用软件定义网络的架构和天地协同传输方案来实现天地网络资源的高度融合,从而优化整个网络资源的共享,通过星间、星地和地面网络链路为规模巨大和分散较广的用户提供跨时空、跨平台的优质网络业务。Software-defined networking technology is an emerging network management method that enables dynamic and efficient network configuration and improves the performance of the entire network. The static architecture of traditional networks is fragmented and complex, and for all networks, greater flexibility and easier control methods are required. SDN combines the forwarding process of network packets (data plane) with the routing decision process (control plane) separation to centralize network intelligence in one network component. Tiandi Network adopts the architecture of software-defined network and the cooperative transmission scheme of Tiandi to realize the high integration of Tiandi network resources, thereby optimizing the sharing of the entire network resources, and providing large-scale and widely dispersed users through inter-satellite, satellite-ground and terrestrial network links. Provide high-quality network services across time and space and across platforms.
天地一体化网络中,节点间能力参差不齐,同时在该网络中各种类型的任务浩如烟海,现有的天地一体化信息网络架构缺少对任务的分布式动态处理技术。具体来说,现有的天地网传输-计算架构是将任务所需数据进行采集,并传回数据中心做统一处理。这样的传输-计算模式忽略了网络中节点的计算能力,导致了较高的传输资源损耗,同时还对数据中心的处理能力有相当的要求。In the integrated sky-earth network, the capabilities of nodes are uneven, and various types of tasks are numerous in the network. The existing integrated information network architecture of the sky and the ground lacks distributed dynamic processing technology for tasks. Specifically, the existing Tiandi network transmission-computing architecture collects the data required for the mission and transmits it back to the data center for unified processing. Such a transmission-computation mode ignores the computing power of nodes in the network, resulting in high transmission resource consumption, and also has considerable requirements on the processing power of the data center.
专利文献CN110247699B(申请号:201910550797.5)公开了一种在天地一体化网络中实现天地间资源协同调度的方法,涉及云计算技术领域;包括如下步骤:步骤一、建立资源协调调度系统;包括一个资源调度节点和N个天基资源节点;步骤二、资源调度节点接收外部部署新应用资源命令;获取新应用资源的资源占用信息;步骤三、资源调度节点获取各天基资源节点的剩余资源信息;步骤四、将t时刻各天基资源节点Ni剩余资源信息与新应用资源的资源占用信息进行比较,筛选出可用天基资源节点;步骤五、从筛选出的天基资源节点中计算最优天基资源节点,并在该天基资源节点中部署新应用资源;该专利通过建立资源调度系统,接受外部部署的应用并获取其资源占用信息,同时筛选天基资源节点中的最优资源节点,最终在该天基节点中部署该应用。该方法解决了天地网络中资源不均衡的问题。Patent document CN110247699B (application number: 201910550797.5) discloses a method for realizing coordinated scheduling of resources between heaven and earth in an integrated network of heaven and earth, which relates to the technical field of cloud computing; it includes the following steps: Step 1, establishing a resource coordination scheduling system; including a resource scheduling nodes and N space-based resource nodes; step 2, the resource scheduling node receives an external deployment new application resource command; obtains resource occupation information of the new application resources; step 3, the resource scheduling node obtains the remaining resource information of each space-based resource node; Step 4: Compare the remaining resource information of each space-based resource node Ni with the resource occupancy information of the new application resource at time t, and filter out the available space-based resource nodes; base resource node, and deploy new application resources in the space-based resource node; this patent accepts externally deployed applications and obtains resource occupancy information by establishing a resource scheduling system, and at the same time selects the optimal resource node in the space-based resource node, Finally, the application is deployed in the space-based node. This method solves the problem of unbalanced resources in the sky-earth network.
“天地一体化网络基于拥塞状态的路径选择算法”,鄢砚军等,《兵器装备工程学报》,2021,42(06),为了降低拥塞导致的队列时延和传播时延,采用了一种基于星间链路的路由选择算法。该算法基于局部的网络信息,通过模拟退火算法找出源节点和目的节点之间的链路。但是该方案没有考虑路径选择过程中网络的全局信息,缺乏统一调控。"Path Selection Algorithm Based on Congestion State in Space-Earth Integrated Network", Yan Jun et al., "Chinese Journal of Weaponry and Equipment Engineering", 2021, 42(06), in order to reduce the queue delay and propagation delay caused by congestion, a satellite-based routing algorithm for inter-links. Based on local network information, the algorithm finds the link between source node and destination node through simulated annealing algorithm. However, this scheme does not consider the global information of the network in the process of path selection, and lacks unified regulation.
“基于SDN的高性能QoS保证低轨卫星星间路由算法”,王奎宇等,《计算机工程》,2021-10-18,研究了星间链路的状态信息交互和低轨道卫星的路由计算。其中路由算法通过其提出的权重函数、稳定度函数和负载度函数加权计算得到最优路径,比较适合卫星通信网络资源受限的场景。但是该方案没有考虑数据路由过程中通过任务计算来降低网络负载的可能。"High-performance QoS guaranteed inter-satellite routing algorithm for low-orbit satellites based on SDN", Wang Kuiyu et al., "Computer Engineering", 2021-10-18, studied the state information exchange of inter-satellite links and the routing calculation of low-orbit satellites. Among them, the routing algorithm obtains the optimal path through the weight function, stability function and load degree function proposed by it, which is more suitable for the scenario of limited satellite communication network resources. However, this scheme does not consider the possibility of reducing network load through task calculation during data routing.
此外也有其他的基于软件定义天地一体化网络中的传输和计算方案,但是他们所作研究首先没有考虑天地一体化网络中节点管理的层次性,依据这种层次性可以大幅降低路径规划和任务部署的复杂度,另外他们没有考虑天地一体化网络中任务可能存在的相关性,而是对每一个任务都做单独的处理,这样增加了地面控制中心的负载,而且网络资源损耗可进一步降低。In addition, there are other transmission and computing solutions based on the software-defined space-ground integrated network, but their research did not consider the hierarchy of node management in the space-ground integrated network. According to this hierarchy, path planning and task deployment can be greatly reduced. In addition, they did not consider the possible correlation of tasks in the integrated space-earth network, but processed each task separately, which increased the load of the ground control center, and the loss of network resources could be further reduced.
发明内容SUMMARY OF THE INVENTION
针对现有技术中的缺陷,本发明的目的是提供一种天地一体化信息网络中多源数据融合处理方法及系统。In view of the defects in the prior art, the purpose of the present invention is to provide a method and system for processing multi-source data fusion in an integrated information network of space and earth.
根据本发明提供的一种天地一体化信息网络中多源数据融合处理方法,包括:According to a method for processing multi-source data fusion in an integrated information network of space and earth provided by the present invention, the method includes:
步骤S1:天地一体化信息网络根据逻辑管理层次进行网络状态和资源实时管控;Step S1: The integrated information network of space and earth performs real-time management and control of network status and resources according to the logical management level;
步骤S2:地面控制中心将一定时间内获取的多个任务进行切分,并根据任务间关系进行融合构成一个多任务执行图;Step S2: the ground control center divides multiple tasks acquired within a certain period of time, and fuses them according to the relationship between tasks to form a multi-task execution graph;
步骤S3:对多任务执行图进行子任务的分组及抽象,并经过序列化后形成全序抽象任务图;Step S3: grouping and abstracting sub-tasks on the multi-task execution graph, and forming a total-order abstract task graph after serialization;
步骤S4:地面控制中心依据所管控网络域的网络视图以及序列化后的抽象任务图进行处理路径规划,并对抽象任务进行最小代价部署规划;Step S4: the ground control center performs processing path planning according to the network view of the controlled network domain and the serialized abstract task graph, and performs minimum cost deployment planning for the abstract tasks;
步骤S5:控制层中控制器将收到的抽象任务进行拆分,并进行处理路径规划和任务部署规划;Step S5: the controller in the control layer splits the received abstract tasks, and performs processing path planning and task deployment planning;
步骤S6:执行层在接收到任务后,按照控制节点下发的计算策略和流表进行任务的计算和传输;并将传算结果返回至用户;Step S6: after receiving the task, the execution layer performs calculation and transmission of the task according to the calculation strategy and the flow table issued by the control node; and returns the calculation result to the user;
所述天地一体化信息网络的逻辑管理层次自上而下分为地面控制中心、控制层以及执行层。The logical management level of the sky-earth integrated information network is divided into a ground control center, a control layer and an execution layer from top to bottom.
优选地,所述步骤S1采用:基于SDN架构的多层天地一体化网络按照逻辑管理层次自下而上分为执行层、控制层和地面控制层;Preferably, the step S1 adopts: the multi-layer space-ground integrated network based on the SDN architecture is divided into an execution layer, a control layer and a ground control layer from bottom to top according to the logical management level;
所述地面控制层是地面管理中心,负责管控控制层的多个控制器,获取所有控制域信息;The ground control layer is the ground management center, which is responsible for managing and controlling multiple controllers of the control layer and obtaining all control domain information;
所述控制器部署于卫星网络和地面网络,按照控制器管控范围分为多个区域,每个区域由一个控制器管控,控制器管控执行层设备;The controller is deployed on the satellite network and the terrestrial network, and is divided into a plurality of areas according to the control range of the controller, each area is managed and controlled by a controller, and the controller controls the execution layer equipment;
所述执行层由天地一体化网络中的传输和计算节点组成;The execution layer is composed of transmission and computing nodes in the sky-earth integrated network;
天地一体化网络从下至上对网络状态和资源进行分层管控,执行节点周期性地上传网络状态信息,控制器将所管控区域内节点的网络状态信息进行整合,并将信息发送至地面控制中心。The integrated space-earth network performs hierarchical management and control of network status and resources from the bottom to the top. The execution node periodically uploads network status information. The controller integrates the network status information of the nodes in the controlled area and sends the information to the ground control center. .
优选地,所述步骤S2采用:地面控制中心将一定时间内获取的多个任务进行切分,再依据任务相关性和时延敏感程度进行任务图融合,构成一个多任务执行图。Preferably, the step S2 adopts: the ground control center divides a plurality of tasks acquired within a certain period of time, and then fuses the task graphs according to task correlation and delay sensitivity to form a multi-task execution graph.
优选地,所述步骤S2采用:Preferably, the step S2 adopts:
步骤S2.1:地面控制中心针对用户上传的每个任务获取相应的位置信息、任务来源信息以及任务类型信息;Step S2.1: the ground control center obtains corresponding position information, task source information and task type information for each task uploaded by the user;
步骤S2.2:地面控制中心根据任务来源信息和任务类型信息确定任务时延敏感值和任务等待值;Step S2.2: The ground control center determines the task delay sensitive value and the task waiting value according to the task source information and the task type information;
步骤S2.3:比较任务等待值与时延敏感阈值,当任务等待值大于时延敏感阈值时,则触发步骤S3;当任务等待值小于等于时延敏感阈值时,则触发步骤S2.4;Step S2.3: compare the task waiting value with the delay sensitive threshold, when the task waiting value is greater than the delay sensitive threshold, trigger step S3; when the task waiting value is less than or equal to the delay sensitive threshold, trigger step S2.4;
步骤S2.4:地面控制中心对N个任务组成的集合T={t1,t2,···,tN},根据位置信息和任务来源信息进行分组;Step S2.4: The ground control center groups the set T={t1 , t2 , . . . , tN} composed of N tasks according to the location information and the task source information;
步骤S2.5:对分组后一组中的所有任务进行任务切分,形成多个任务图,任务图是可执行代码所构成的有向无环图;Step S2.5: perform task segmentation on all tasks in a group after grouping to form multiple task graphs, and the task graph is a directed acyclic graph composed of executable codes;
步骤S2.6:按照前置子任务是否相同进行任务图融合;若出现未被融合子任务,增加该任务的任务等待值至预设值,重复触发步骤S2.3至步骤S2.6,直至所有子任务均被融合。Step S2.6: Perform task graph fusion according to whether the preceding subtasks are the same; if there are subtasks that are not fused, increase the task waiting value of the task to a preset value, and repeat triggering steps S2.3 to S2.6 until All subtasks are fused.
优选地,所述步骤S3采用:Preferably, the step S3 adopts:
步骤S3.1:根据任务图中子任务执行依赖进行全序分组;Step S3.1: perform total order grouping according to the execution dependencies of subtasks in the task graph;
步骤S3.2:对分组后的每组子任务进行数据压缩率和资源需求量的抽象;Step S3.2: abstracting data compression rate and resource requirements for each group of subtasks after grouping;
步骤S3.3:将非全序任务图按照数据压缩率进行序列化;Step S3.3: serialize the non-total order task graph according to the data compression rate;
所述非全序任务图是任务图中存在子任务的输入输出没有前后关系。The non-total order task graph is that the input and output of subtasks in the task graph have no contextual relationship.
优选地,所述步骤S4采用:Preferably, the step S4 adopts:
步骤S4.1:确定控制层传输路径源节点和目标节点;Step S4.1: Determine the source node and the target node of the transmission path of the control layer;
步骤S4.2:以路径最小代价为目标规划路径,通过启发式算法迭代计算,每次迭代将一个控制域添加到路由路径,获取最小成本路径;Step S4.2: Plan the path with the minimum cost of the path as the goal, and calculate iteratively through the heuristic algorithm. Each iteration adds a control domain to the routing path to obtain the minimum cost path;
步骤S4.3:以部署代价最小为目标,通过抽象任务部署方法确定抽象任务部署位置。Step S4.3: Aiming at the minimum deployment cost, the abstract task deployment location is determined by the abstract task deployment method.
优选地,所述步骤S5采用:Preferably, the step S5 adopts:
步骤S5.1:对抽象任务进行拆分,并将多个子任务序列化;Step S5.1: Split the abstract task and serialize multiple subtasks;
步骤S5.2:确定执行层传输路径源节点和目标节点;Step S5.2: Determine the source node and the target node of the execution layer transmission path;
步骤S5.3:通过启发式算法迭代计算,每次迭代将一个执行节点添加到路由路径,获取最小成本路径;Step S5.3: Calculate iteratively through the heuristic algorithm, add an execution node to the routing path each iteration, and obtain the minimum cost path;
步骤S5.4:以部署代价最小为目标,通过子任务部署方法确定子任务部署位置。Step S5.4: Aiming at the minimum deployment cost, the subtask deployment position is determined by the subtask deployment method.
根据本发明提供的一种天地一体化信息网络中多源数据融合处理系统,包括:According to a multi-source data fusion processing system in a sky-earth integrated information network provided by the present invention, the system includes:
模块M1:天地一体化信息网络根据逻辑管理层次进行网络状态和资源实时管控;Module M1: The integrated information network of space and earth conducts real-time management and control of network status and resources according to the logical management level;
模块M2:地面控制中心将一定时间内获取的多个任务进行切分,并根据任务间关系进行融合构成一个多任务执行图;Module M2: The ground control center divides multiple tasks acquired within a certain period of time, and fuses them according to the relationship between tasks to form a multi-task execution graph;
模块M3:对多任务执行图进行子任务的分组及抽象,并经过序列化后形成全序抽象任务图;Module M3: Grouping and abstracting sub-tasks of the multi-task execution graph, and serializing it to form a total-order abstract task graph;
模块M4:地面控制中心依据所管控网络域的网络视图以及序列化后的抽象任务图进行处理路径规划,并对抽象任务进行最小代价部署规划;Module M4: The ground control center performs processing path planning according to the network view of the controlled network domain and the serialized abstract task graph, and performs minimum cost deployment planning for the abstract tasks;
模块M5:控制层中控制器将收到的抽象任务进行拆分,并进行处理路径规划和任务部署规划;Module M5: The controller in the control layer splits the received abstract tasks, and performs processing path planning and task deployment planning;
模块M6:执行层在接收到任务后,按照控制节点下发的计算策略和流表进行任务的计算和传输;并将传算结果返回至用户;Module M6: After the execution layer receives the task, it calculates and transmits the task according to the calculation strategy and flow table issued by the control node; and returns the calculation result to the user;
所述天地一体化信息网络的逻辑管理层次自上而下分为地面控制中心、控制层以及执行层。The logical management level of the sky-earth integrated information network is divided into a ground control center, a control layer and an execution layer from top to bottom.
优选地,所述模块M1采用:基于SDN架构的多层天地一体化网络按照逻辑管理层次自下而上分为执行层、控制层和地面控制层;Preferably, the module M1 adopts: the multi-layered space-ground integrated network based on the SDN architecture is divided into an execution layer, a control layer and a ground control layer from bottom to top according to the logical management level;
所述地面控制层是地面管理中心,负责管控控制层的多个控制器,获取所有控制域信息;The ground control layer is the ground management center, which is responsible for managing and controlling multiple controllers of the control layer and obtaining all control domain information;
所述控制器部署于卫星网络和地面网络,按照控制器管控范围分为多个区域,每个区域由一个控制器管控,控制器管控执行层设备;The controller is deployed on the satellite network and the terrestrial network, and is divided into a plurality of areas according to the control range of the controller, each area is managed and controlled by a controller, and the controller controls the execution layer equipment;
所述执行层由天地一体化网络中的传输和计算节点组成;The execution layer is composed of transmission and computing nodes in the sky-earth integrated network;
天地一体化网络从下至上对网络状态和资源进行分层管控,执行节点周期性地上传网络状态信息,控制器将所管控区域内节点的网络状态信息进行整合,并将信息发送至地面控制中心;The integrated space-earth network performs hierarchical management and control of network status and resources from the bottom to the top. The execution node periodically uploads network status information. The controller integrates the network status information of the nodes in the controlled area and sends the information to the ground control center. ;
所述模块M2采用:地面控制中心将一定时间内获取的多个任务进行切分,再依据任务相关性和时延敏感程度进行任务图融合,构成一个多任务执行图;The module M2 adopts: the ground control center divides multiple tasks acquired within a certain period of time, and then fuses the task graphs according to the task correlation and delay sensitivity to form a multi-task execution graph;
所述模块M2采用:The module M2 adopts:
模块M2.1:地面控制中心针对用户上传的每个任务获取相应的位置信息、任务来源信息以及任务类型信息;Module M2.1: The ground control center obtains the corresponding position information, task source information and task type information for each task uploaded by the user;
模块M2.2:地面控制中心根据任务来源信息和任务类型信息确定任务时延敏感值和任务等待值;Module M2.2: The ground control center determines the task delay sensitive value and the task waiting value according to the task source information and task type information;
模块M2.3:比较任务等待值与时延敏感阈值,当任务等待值大于时延敏感阈值时,则触发模块M3;当任务等待值小于等于时延敏感阈值时,则触发模块M2.4;Module M2.3: Compare the task waiting value with the delay sensitive threshold. When the task waiting value is greater than the delay sensitive threshold, the module M3 is triggered; when the task waiting value is less than or equal to the delay sensitive threshold, the module M2.4 is triggered;
模块M2.4:地面控制中心对N个任务组成的集合T={t1,t2,···,tN},根据位置信息和任务来源信息进行分组;Module M2.4: The ground control center groups a set of N tasks T={t1 , t2 , . . . , tN} according to location information and task source information;
模块M2.5:对分组后一组中的所有任务进行任务切分,形成多个任务图,任务图是可执行代码所构成的有向无环图;Module M2.5: Divide all tasks in a group after grouping to form multiple task graphs. The task graph is a directed acyclic graph composed of executable codes;
模块M2.6:按照前置子任务是否相同进行任务图融合;若出现未被融合子任务,增加该任务的任务等待值至预设值,重复触发模块M2.3至模块M2.6,直至所有子任务均被融合。Module M2.6: Perform task graph fusion according to whether the preceding subtasks are the same; if there is an unfused subtask, increase the task waiting value of the task to the preset value, and repeatedly trigger modules M2.3 to M2.6 until All subtasks are fused.
优选地,所述模块M3采用:Preferably, the module M3 adopts:
模块M3.1:根据任务图中子任务执行依赖进行全序分组;Module M3.1: perform total order grouping according to the execution dependencies of subtasks in the task graph;
模块M3.2:对分组后的每组子任务进行数据压缩率和资源需求量的抽象;Module M3.2: abstract data compression rate and resource requirements for each group of subtasks after grouping;
模块M3.3:将非全序任务图按照数据压缩率进行序列化;Module M3.3: Serialize the non-total order task graph according to the data compression rate;
所述非全序任务图是任务图中存在子任务的输入输出没有前后关系;The non-total order task graph is that the input and output of subtasks in the task graph have no context;
所述模块M4采用:The module M4 adopts:
模块M4.1:确定控制层传输路径源节点和目标节点;Module M4.1: Determine the source node and target node of the control layer transmission path;
模块M4.2:以路径最小代价为目标规划路径,通过启发式算法迭代计算,每次迭代将一个控制域添加到路由路径,获取最小成本路径;Module M4.2: Plan the path with the minimum cost of the path as the goal, and iteratively calculate through the heuristic algorithm. Each iteration adds a control domain to the routing path to obtain the minimum cost path;
模块M4.3:以部署代价最小为目标,通过抽象任务部署方法确定抽象任务部署位置;Module M4.3: Aiming at the minimum deployment cost, the abstract task deployment location is determined by the abstract task deployment method;
所述模块M5采用:The module M5 adopts:
模块M5.1:对抽象任务进行拆分,并将多个子任务序列化;Module M5.1: Split abstract tasks and serialize multiple subtasks;
模块M5.2:确定执行层传输路径源节点和目标节点;Module M5.2: Determine the source node and target node of the execution layer transmission path;
模块M5.3:通过启发式算法迭代计算,每次迭代将一个执行节点添加到路由路径,获取最小成本路径;Module M5.3: Iterative calculation through heuristic algorithm, adding an execution node to the routing path each iteration to obtain the minimum cost path;
模块M5.4:以部署代价最小为目标,通过子任务部署方法确定子任务部署位置。Module M5.4: Aiming at the minimum deployment cost, the subtask deployment location is determined by the subtask deployment method.
与现有技术相比,本发明具有如下的有益效果:Compared with the prior art, the present invention has the following beneficial effects:
1、通过任务融合可以将某些具有相同处理过程但是具有不同数据源的任务执行过程合并,从而减少网络传输资源损耗,同时减少任务部署时间;1. Through task fusion, some task execution processes with the same processing process but different data sources can be combined, thereby reducing the loss of network transmission resources and reducing the task deployment time;
2、任务图抽象目的在于在多数据源任务场景下,数据源往往分布较为分散,如果直接进行任务图序列化,会增加了额外传输链路。2. The purpose of task graph abstraction is that in the multi-data source task scenario, the data sources are often scattered. If the task graph is serialized directly, additional transmission links will be added.
附图说明Description of drawings
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:Other features, objects and advantages of the present invention will become more apparent by reading the detailed description of non-limiting embodiments with reference to the following drawings:
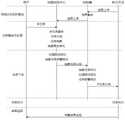
图1为本发明实施例中使用的软件定义天地一体化信息网络中多源数据融合处理方法的时序图。FIG. 1 is a sequence diagram of a multi-source data fusion processing method in a software-defined space-ground integrated information network used in an embodiment of the present invention.
图2为本发明实施例中软件定义天地一体化信息网络中多源数据融合处理的系统模块示意图。FIG. 2 is a schematic diagram of a system module for multi-source data fusion processing in a software-defined space-ground integrated information network according to an embodiment of the present invention.
图3为本发明实施例中多任务融合示意图。FIG. 3 is a schematic diagram of multi-task fusion in an embodiment of the present invention.
图4为本发明实施例中任务分组及抽象示意图。FIG. 4 is a schematic diagram of task grouping and abstraction in an embodiment of the present invention.
图5为本发明实施例中任务序列化示意图。FIG. 5 is a schematic diagram of task serialization in an embodiment of the present invention.
具体实施方式Detailed ways
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several changes and improvements can be made without departing from the inventive concept. These all belong to the protection scope of the present invention.
实施例1Example 1
根据本发明提供的一种天地一体化信息网络中多源数据融合处理方法,包括:According to a method for processing multi-source data fusion in an integrated information network of space and earth provided by the present invention, the method includes:
步骤S1:天地一体化信息网络根据逻辑管理层次进行网络状态和资源实时管控,按层次描述网络拓扑,同时对其中可用资源进行整合及量化;Step S1: The integrated information network of space and earth performs real-time management and control of network status and resources according to the logical management level, describes the network topology according to the level, and integrates and quantifies the available resources therein;
步骤S2:地面控制中心将一定时间内获取的多个任务进行切分,并根据任务间关系进行融合构成一个多任务执行图;Step S2: the ground control center divides multiple tasks acquired within a certain period of time, and fuses them according to the relationship between tasks to form a multi-task execution graph;
步骤S3:对多任务执行图进行子任务的分组及抽象,形成抽象任务图,抽象任务图中由抽象任务连接组成,抽象任务为多个子任务的连接;并经过序列化后形成全序抽象任务图;Step S3: Grouping and abstracting sub-tasks on the multi-task execution graph to form an abstract task graph, the abstract task graph is composed of abstract task connections, and the abstract tasks are connections of multiple sub-tasks; and after serialization, a total-order abstract task is formed picture;
步骤S4:地面控制中心依据所管控网络域的网络视图以及序列化后的抽象任务图进行处理路径规划,并对抽象任务进行最小代价部署规划;Step S4: the ground control center performs processing path planning according to the network view of the controlled network domain and the serialized abstract task graph, and performs minimum cost deployment planning for the abstract tasks;
步骤S5:控制层中控制器将收到的地面控制中心所下发的抽象任务后,对其进行拆分,根据所管控的控制域网络视图进行传算路径规划,并部署每个子任务;Step S5: After the controller in the control layer receives the abstract task issued by the ground control center, it splits it, performs transmission path planning according to the controlled control domain network view, and deploys each sub-task;
步骤S6:执行层传算节点在接收到子任务后,按照控制节点下发的计算策略和流表进行任务的计算和传输;并将传算结果返回至用户;Step S6: after receiving the subtask, the execution layer transfer node calculates and transmits the task according to the calculation strategy and the flow table issued by the control node; and returns the transfer result to the user;
所述天地一体化信息网络的逻辑管理层次自上而下分为地面控制中心、控制层以及执行层。The logical management level of the sky-earth integrated information network is divided into a ground control center, a control layer and an execution layer from top to bottom.
具体地,所述步骤S1采用:基于SDN架构的多层天地一体化网络按照逻辑管理层次自下而上分为执行层、控制层和地面控制层;Specifically, the step S1 adopts: the multi-layer space-ground integrated network based on the SDN architecture is divided into an execution layer, a control layer and a ground control layer from bottom to top according to the logical management level;
所述地面控制层是地面管理中心,负责管控控制层的多个控制器,获取所有控制域信息;The ground control layer is the ground management center, which is responsible for managing and controlling multiple controllers of the control layer and obtaining all control domain information;
所述控制器部署于卫星网络和地面网络,按照控制器管控范围分为多个区域,每个区域由一个控制器管控,控制器管控执行层设备;控制器将所管控区域内节点的网络状态进行整合,并将该信息向地面控制中心提供;The controller is deployed on the satellite network and the ground network, and is divided into multiple areas according to the control range of the controller, each area is managed and controlled by a controller, and the controller controls the execution layer equipment; the controller controls the network status of the nodes in the area. integrate and provide this information to the ground control center;
所述执行层由天地一体化网络中的传输和计算节点组成;The execution layer is composed of transmission and computing nodes in the sky-earth integrated network;
天地一体化网络从下至上对网络状态和资源进行分层管控,执行节点周期性地上传网络状态信息,控制器将所管控区域内节点的网络状态信息进行整合,并将信息发送至地面控制中心。The integrated space-earth network performs hierarchical management and control of network status and resources from the bottom to the top. The execution node periodically uploads network status information. The controller integrates the network status information of the nodes in the controlled area and sends the information to the ground control center. .
具体地,所述步骤S2采用:地面控制中心将一定时间内获取的多个任务进行切分,任务的时延敏感陈固定可以量化表示,依据任务相关性和时延敏感程度进行任务图融合,构成一个多任务执行图。子任务由每个任务拆分为多个有依赖关系的执行块得到。任务融合的优势在于,面对天地网中极为繁多的任务,将其中一些处理过程相关性极强的任务进行合并,可大幅降低网络负载和任务部署的时间。Specifically, the step S2 adopts: the ground control center divides multiple tasks acquired within a certain period of time, the delay sensitivity of the tasks can be quantitatively expressed, and the task graph fusion is performed according to the task correlation and delay sensitivity, Form a multitasking execution graph. Subtasks are obtained by splitting each task into multiple dependent execution blocks. The advantage of task fusion is that, in the face of a huge variety of tasks in the Tiandi network, combining some of the tasks with highly related processing processes can greatly reduce network load and task deployment time.
具体地,所述步骤S2采用:Specifically, the step S2 adopts:
步骤S2.1:地面控制中心针对用户上传的每个任务获取相应的位置信息、任务来源信息以及任务类型信息;Step S2.1: the ground control center obtains corresponding position information, task source information and task type information for each task uploaded by the user;
步骤S2.2:地面控制中心根据任务来源信息和任务类型信息确定任务时延敏感值和任务等待值;Step S2.2: The ground control center determines the task delay sensitive value and the task waiting value according to the task source information and the task type information;
步骤S2.3:比较任务等待值与时延敏感阈值,当任务等待值大于时延敏感阈值时,则触发步骤S3;当任务等待值小于等于时延敏感阈值时,则触发步骤S2.4;Step S2.3: compare the task waiting value with the delay sensitive threshold, when the task waiting value is greater than the delay sensitive threshold, trigger step S3; when the task waiting value is less than or equal to the delay sensitive threshold, trigger step S2.4;
步骤S2.4:地面控制中心对N个任务组成的集合T={t1,t2,···,tN},为了增加多个任务的相似性,提前对任务进行划分,根据位置信息、任务来源信息以及软件多种因素对任务进行分组;Step S2.4: The ground control center divides the tasks into a set T={t1 , t2 , ···, tN } for N tasks. In order to increase the similarity of multiple tasks, the tasks are divided in advance, according to the position information , task source information and various software factors to group tasks;
步骤S2.5:对分组后一组中的所有任务进行任务切分,形成多个任务图,任务图是可执行代码所构成的有向无环图;一个任务可以在多个编译阶段进行切分,比如源代码、中间代码级别,现有很多方法可以解决这个任务切分的问题,比如根据多个代码段之间的依赖关系。其次,在切分任务之后形成多个代码的执行块,执行块可以在逻辑上视为由输入、输出、以及代码段组成。每个子任务即为可执行的代码块。代码执行块之间根据输入、输出的依赖关系可以构成任务执行图(任务图)。Step S2.5: Perform task segmentation on all tasks in the group after grouping to form multiple task graphs. The task graph is a directed acyclic graph composed of executable codes; a task can be segmented in multiple compilation stages. There are many ways to solve the problem of task segmentation, such as according to the dependencies between multiple code segments. Second, after the tasks are divided, multiple code execution blocks are formed, and the execution blocks can be logically considered to be composed of input, output, and code segments. Each subtask is an executable code block. A task execution graph (task graph) can be formed according to the input and output dependencies between the code execution blocks.
步骤S2.6:按照前置子任务是否相同进行任务图融合;若出现未被融合子任务,增加该任务的任务等待值至预设值,重复触发步骤S2.3至步骤S2.6,直至所有子任务均被融合。前置子任务是指在一个任务由切分得到一个任务执行图之后,多个任务的多个执行图中,有相同的执行块(相同的子任务),执行块根据代码段、输入、输出可确定是否相同。前置任务块指多个任务图从源点(有向无环图的源点)开始的多个子任务块。Step S2.6: Perform task graph fusion according to whether the preceding subtasks are the same; if there are subtasks that are not fused, increase the task waiting value of the task to a preset value, and repeat triggering steps S2.3 to S2.6 until All subtasks are fused. Pre-subtask means that after a task is divided into a task execution graph, multiple execution graphs of multiple tasks have the same execution block (same subtask), and the execution block is based on the code segment, input, and output. It can be determined whether they are the same. The predecessor task block refers to the multiple subtask blocks of multiple task graphs starting from the source point (the source point of the directed acyclic graph).
具体地,所述步骤S3采用:依据多任务融合后任务图进行分组,分组过程依据子任务之间的输入输出相关性,分组后,多个子任务可作为一个任务进行部署也可以重新拆分为多个子任务。Specifically, the step S3 adopts: grouping according to the task graph after multi-task fusion, the grouping process is based on the input and output correlation between sub-tasks, after grouping, a plurality of sub-tasks can be deployed as one task or can be re-split into Multiple subtasks.
具体地,specifically,
步骤S3.1:根据任务图中子任务执行依赖进行全序分组;Step S3.1: perform total order grouping according to the execution dependencies of subtasks in the task graph;
步骤S3.2:对分组后的每组子任务进行数据压缩率和资源需求量的抽象;Step S3.2: abstracting data compression rate and resource requirements for each group of subtasks after grouping;
步骤S3.3:将非全序任务图按照数据压缩率进行序列化;Step S3.3: serialize the non-total order task graph according to the data compression rate;
所述非全序任务图是任务图中存在子任务的输入输出没有前后关系。The non-total order task graph is that the input and output of subtasks in the task graph have no contextual relationship.
具体地,所述步骤S4采用:对抽象任务进行处理路径规划依据其管控的控制域所上传的网络状态,以及任务的数据源和目标点进行路径规划,采用启发式方法寻找最小成本路径。任务部署是指决定将抽象任务具体放置在哪个控制域。Specifically, the step S4 adopts: performing path planning for processing the abstract task according to the network state uploaded by the control domain under its control, as well as the data source and target point of the task, performing path planning, and using a heuristic method to find the minimum cost path. Task deployment refers to deciding which control domain to place an abstract task in concretely.
步骤S4.1:确定控制层传输路径源节点和目标节点;Step S4.1: Determine the source node and the target node of the transmission path of the control layer;
步骤S4.2:以路径最小代价为目标规划路径,通过启发式算法迭代计算,每次迭代将一个控制域添加到路由路径,获取最小成本路径;Step S4.2: Plan the path with the minimum cost of the path as the goal, and calculate iteratively through the heuristic algorithm. Each iteration adds a control domain to the routing path to obtain the minimum cost path;
步骤S4.3:以部署代价最小为目标,通过抽象任务部署方法确定抽象任务部署位置。Step S4.3: Aiming at the minimum deployment cost, the abstract task deployment location is determined by the abstract task deployment method.
所述抽象任务部署方法是将抽象任务按照子任务部署方法部署于控制层面(即地面控制器到控制器这一层)。The abstract task deployment method is to deploy the abstract task on the control plane (ie, the layer from the ground controller to the controller) according to the sub-task deployment method.
具体地,所述步骤S5采用:将多个子任务组成的抽象任务进行拆分,以便将每个子任务分别进行部署。处理路径依据任务数据源、目标点和控制域中网络状态进行规划。任务部署在路径规划完成的基础上采用启发式算法完成。Specifically, the step S5 adopts: splitting an abstract task composed of a plurality of subtasks, so as to deploy each subtask separately. The processing path is planned according to the task data source, destination point and network state in the control domain. Task deployment is completed by heuristic algorithm based on the completion of path planning.
步骤S5.1:对抽象任务进行拆分,并将多个子任务序列化;Step S5.1: Split the abstract task and serialize multiple subtasks;
步骤S5.2:确定执行层传输路径源节点和目标节点;Step S5.2: Determine the source node and the target node of the execution layer transmission path;
步骤S5.3:通过启发式算法迭代计算,每次迭代将一个执行节点添加到路由路径,获取最小成本路径;Step S5.3: Calculate iteratively through the heuristic algorithm, add an execution node to the routing path each iteration, and obtain the minimum cost path;
步骤S5.4:以部署代价最小为目标,通过子任务部署方法确定子任务部署位置。Step S5.4: Aiming at the minimum deployment cost, the subtask deployment position is determined by the subtask deployment method.
根据本发明提供的一种天地一体化信息网络中多源数据融合处理系统,包括:According to a multi-source data fusion processing system in a sky-earth integrated information network provided by the present invention, the system includes:
模块M1:天地一体化信息网络根据逻辑管理层次进行网络状态和资源实时管控,按层次描述网络拓扑,同时对其中可用资源进行整合及量化;Module M1: The integrated information network of heaven and earth conducts real-time management and control of network status and resources according to the logical management level, describes the network topology according to the level, and integrates and quantifies the available resources in it;
模块M2:地面控制中心将一定时间内获取的多个任务进行切分,并根据任务间关系进行融合构成一个多任务执行图;Module M2: The ground control center divides multiple tasks acquired within a certain period of time, and fuses them according to the relationship between tasks to form a multi-task execution graph;
模块M3:对多任务执行图进行子任务的分组及抽象,形成抽象任务图,抽象任务图中由抽象任务连接组成,抽象任务为多个子任务的连接;并经过序列化后形成全序抽象任务图;Module M3: Group and abstract the subtasks of the multi-task execution graph to form an abstract task graph. The abstract task graph is composed of abstract task connections, and the abstract tasks are the connections of multiple subtasks; and after serialization, a total order abstract task is formed picture;
模块M4:地面控制中心依据所管控网络域的网络视图以及序列化后的抽象任务图进行处理路径规划,并对抽象任务进行最小代价部署规划;Module M4: The ground control center performs processing path planning according to the network view of the controlled network domain and the serialized abstract task graph, and performs minimum cost deployment planning for the abstract tasks;
模块M5:控制层中控制器将收到的地面控制中心所下发的抽象任务后,对其进行拆分,根据所管控的控制域网络视图进行传算路径规划,并部署每个子任务;Module M5: After the controller in the control layer will receive the abstract task issued by the ground control center, it will split it, plan the transmission path according to the controlled network view of the control domain, and deploy each sub-task;
模块M6:执行层传算节点在接收到子任务后,按照控制节点下发的计算策略和流表进行任务的计算和传输;并将传算结果返回至用户;Module M6: After receiving the subtask, the execution layer transfer node calculates and transmits the task according to the calculation strategy and flow table issued by the control node; and returns the transfer result to the user;
所述天地一体化信息网络的逻辑管理层次自上而下分为地面控制中心、控制层以及执行层。The logical management level of the sky-earth integrated information network is divided into a ground control center, a control layer and an execution layer from top to bottom.
具体地,所述模块M1采用:基于SDN架构的多层天地一体化网络按照逻辑管理层次自下而上分为执行层、控制层和地面控制层;Specifically, the module M1 adopts: the multi-layer space-ground integrated network based on the SDN architecture is divided into an execution layer, a control layer and a ground control layer from bottom to top according to the logical management level;
所述地面控制层是地面管理中心,负责管控控制层的多个控制器,获取所有控制域信息;The ground control layer is the ground management center, which is responsible for managing and controlling multiple controllers of the control layer and obtaining all control domain information;
所述控制器部署于卫星网络和地面网络,按照控制器管控范围分为多个区域,每个区域由一个控制器管控,控制器管控执行层设备;控制器将所管控区域内节点的网络状态进行整合,并将该信息向地面控制中心提供;The controller is deployed on the satellite network and the terrestrial network, and is divided into multiple areas according to the control range of the controller, each area is managed and controlled by a controller, and the controller controls the execution layer equipment; the controller controls the network status of the nodes in the area. integrate and provide this information to the ground control center;
所述执行层由天地一体化网络中的传输和计算节点组成;The execution layer is composed of transmission and computing nodes in the sky-earth integrated network;
天地一体化网络从下至上对网络状态和资源进行分层管控,执行节点周期性地上传网络状态信息,控制器将所管控区域内节点的网络状态信息进行整合,并将信息发送至地面控制中心。The integrated space-earth network performs hierarchical management and control of network status and resources from the bottom to the top. The execution node periodically uploads network status information. The controller integrates the network status information of the nodes in the controlled area and sends the information to the ground control center. .
具体地,所述模块M2采用:地面控制中心将一定时间内获取的多个任务进行切分,任务的时延敏感陈固定可以量化表示,依据任务相关性和时延敏感程度进行任务图融合,构成一个多任务执行图。子任务由每个任务拆分为多个有依赖关系的执行块得到。任务融合的优势在于,面对天地网中极为繁多的任务,将其中一些处理过程相关性极强的任务进行合并,可大幅降低网络负载和任务部署的时间。Specifically, the module M2 adopts: the ground control center divides multiple tasks acquired within a certain period of time, the delay sensitivity of the tasks can be quantitatively expressed, and the task graph fusion is performed according to task correlation and delay sensitivity, Form a multitasking execution graph. Subtasks are obtained by splitting each task into multiple dependent execution blocks. The advantage of task fusion is that, in the face of a huge variety of tasks in the Tiandi network, combining some of the tasks with highly related processing processes can greatly reduce network load and task deployment time.
具体地,所述模块M2采用:Specifically, the module M2 adopts:
模块M2.1:地面控制中心针对用户上传的每个任务获取相应的位置信息、任务来源信息以及任务类型信息;Module M2.1: The ground control center obtains the corresponding position information, task source information and task type information for each task uploaded by the user;
模块M2.2:地面控制中心根据任务来源信息和任务类型信息确定任务时延敏感值和任务等待值;Module M2.2: The ground control center determines the task delay sensitive value and the task waiting value according to the task source information and task type information;
模块M2.3:比较任务等待值与时延敏感阈值,当任务等待值大于时延敏感阈值时,则触发模块M3;当任务等待值小于等于时延敏感阈值时,则触发模块M2.4;Module M2.3: Compare the task waiting value with the delay sensitive threshold. When the task waiting value is greater than the delay sensitive threshold, the module M3 is triggered; when the task waiting value is less than or equal to the delay sensitive threshold, the module M2.4 is triggered;
模块M2.4:地面控制中心对N个任务组成的集合T={t1,t2,···,tN},为了增加多个任务的相似性,提前对任务进行划分,根据位置信息、任务来源信息以及软件多种因素对任务进行分组;Module M2.4: The ground control center consists of a set of N tasks T={t1 ,t2 ,...,tN }, in order to increase the similarity of multiple tasks, the tasks are divided in advance, according to the position information , task source information and various software factors to group tasks;
模块M2.5:对分组后一组中的所有任务进行任务切分,形成多个任务图,任务图是可执行代码所构成的有向无环图;一个任务可以在多个编译阶段进行切分,比如源代码、中间代码级别,现有很多方法可以解决这个任务切分的问题,比如根据多个代码段之间的依赖关系。其次,在切分任务之后形成多个代码的执行块,执行块可以在逻辑上视为由输入、输出、以及代码段组成。每个子任务即为可执行的代码块。代码执行块之间根据输入、输出的依赖关系可以构成任务执行图(任务图)。Module M2.5: Divide all tasks in a group after grouping to form multiple task graphs. The task graph is a directed acyclic graph composed of executable codes; a task can be divided in multiple compilation stages. There are many ways to solve the problem of task segmentation, such as according to the dependencies between multiple code segments. Second, after the tasks are divided, multiple code execution blocks are formed, and the execution blocks can be logically considered to be composed of input, output, and code segments. Each subtask is an executable code block. A task execution graph (task graph) can be formed according to the input and output dependencies between the code execution blocks.
模块M2.6:按照前置子任务是否相同进行任务图融合;若出现未被融合子任务,增加该任务的任务等待值至预设值,重复触发模块M2.3至模块M2.6,直至所有子任务均被融合。前置子任务是指在一个任务由切分得到一个任务执行图之后,多个任务的多个执行图中,有相同的执行块(相同的子任务),执行块根据代码段、输入、输出可确定是否相同。前置任务块指多个任务图从源点(有向无环图的源点)开始的多个子任务块。Module M2.6: Perform task graph fusion according to whether the preceding subtasks are the same; if there is an unfused subtask, increase the task waiting value of the task to the preset value, and repeatedly trigger modules M2.3 to M2.6 until All subtasks are fused. Pre-subtask means that after a task is divided into a task execution graph, multiple execution graphs of multiple tasks have the same execution block (same subtask), and the execution block is based on the code segment, input, and output. It can be determined whether they are the same. The predecessor task block refers to the multiple subtask blocks of multiple task graphs starting from the source point (the source point of the directed acyclic graph).
具体地,所述模块M3采用:依据多任务融合后任务图进行分组,分组过程依据子任务之间的输入输出相关性,分组后,多个子任务可作为一个任务进行部署也可以重新拆分为多个子任务。Specifically, the module M3 adopts: grouping according to the task graph after multi-task fusion, the grouping process is based on the input and output correlation between subtasks, and after grouping, a plurality of subtasks can be deployed as one task or can be re-divided into Multiple subtasks.
具体地,specifically,
模块M3.1:根据任务图中子任务执行依赖进行全序分组;Module M3.1: perform total order grouping according to the execution dependencies of subtasks in the task graph;
模块M3.2:对分组后的每组子任务进行数据压缩率和资源需求量的抽象;Module M3.2: abstract data compression rate and resource requirements for each group of subtasks after grouping;
模块M3.3:将非全序任务图按照数据压缩率进行序列化;Module M3.3: Serialize the non-total order task graph according to the data compression rate;
所述非全序任务图是任务图中存在子任务的输入输出没有前后关系。The non-total order task graph is that the input and output of subtasks in the task graph have no contextual relationship.
具体地,所述模块M4采用:对抽象任务进行处理路径规划依据其管控的控制域所上传的网络状态,以及任务的数据源和目标点进行路径规划,采用启发式方法寻找最小成本路径。任务部署是指决定将抽象任务具体放置在哪个控制域。Specifically, the module M4 adopts: path planning for processing the abstract task according to the network state uploaded by the control domain under its control, and the data source and target point of the task, and uses heuristic method to find the minimum cost path. Task deployment refers to deciding which control domain to place an abstract task in concretely.
模块M4.1:确定控制层传输路径源节点和目标节点;Module M4.1: Determine the source node and target node of the control layer transmission path;
模块M4.2:以路径最小代价为目标规划路径,通过启发式算法迭代计算,每次迭代将一个控制域添加到路由路径,获取最小成本路径;Module M4.2: Plan the path with the minimum cost of the path as the goal, and iteratively calculate through the heuristic algorithm. Each iteration adds a control domain to the routing path to obtain the minimum cost path;
模块M4.3:以部署代价最小为目标,通过抽象任务部署方法确定抽象任务部署位置。Module M4.3: To minimize the deployment cost, determine the deployment location of the abstract task through the abstract task deployment method.
所述抽象任务部署方法是将抽象任务按照子任务部署方法部署于控制层面(即地面控制器到控制器这一层)。The abstract task deployment method is to deploy the abstract task on the control plane (ie, the layer from the ground controller to the controller) according to the sub-task deployment method.
具体地,所述模块M5采用:将多个子任务组成的抽象任务进行拆分,以便将每个子任务分别进行部署。处理路径依据任务数据源、目标点和控制域中网络状态进行规划。任务部署在路径规划完成的基础上采用启发式算法完成。Specifically, the module M5 adopts: splitting an abstract task composed of multiple subtasks, so as to deploy each subtask separately. The processing path is planned according to the task data source, destination point and network state in the control domain. Task deployment is completed by heuristic algorithm based on the completion of path planning.
模块M5.1:对抽象任务进行拆分,并将多个子任务序列化;Module M5.1: Split abstract tasks and serialize multiple subtasks;
模块M5.2:确定执行层传输路径源节点和目标节点;Module M5.2: Determine the source node and target node of the execution layer transmission path;
模块M5.3:通过启发式算法迭代计算,每次迭代将一个执行节点添加到路由路径,获取最小成本路径;Module M5.3: Iterative calculation through heuristic algorithm, adding an execution node to the routing path each iteration to obtain the minimum cost path;
模块M5.4:以部署代价最小为目标,通过子任务部署方法确定子任务部署位置。Module M5.4: Aiming at the minimum deployment cost, the subtask deployment location is determined by the subtask deployment method.
实施例2Example 2
实施例2是实施例1的优选例Embodiment 2 is a preferred example of Embodiment 1
本发明提供了一种软件定义天地一体化信息网络中多源数据融合处理方法,如图1所示,包括以下步骤:The present invention provides a multi-source data fusion processing method in a software-defined space-earth integrated information network, as shown in Figure 1, comprising the following steps:
步骤s1:通过SDN架构特有的性质,在多层管控的天地一体化网络环境中,网络层次从下至上分为执行层、控制层、地面控制层。地面控制层是地面管理中心,负责管控控制层的多个控制器。控制器部署于卫星网络和地面网络,管控执行层设备。这个网络从下至上对网络状态和资源进行分层管控。地面数据中心掌握所有控制域信息。执行节点周期性地上传网络状态信息,各层控制节点据此动态地向上层更新各自域内的网络状态;Step s1: Through the unique properties of the SDN architecture, in the multi-layered management and control of the world-ground integrated network environment, the network layer is divided into an execution layer, a control layer, and a ground control layer from bottom to top. The ground control layer is the ground management center, which is responsible for managing and controlling multiple controllers of the control layer. The controller is deployed in the satellite network and the ground network, and controls the execution layer equipment. This network performs hierarchical management and control of network status and resources from the bottom up. The ground data center holds all control domain information. The execution node periodically uploads the network status information, and the control nodes of each layer dynamically update the network status in their respective domains to the upper layer accordingly;
步骤s2:网络中用户上传任务至地面数据中心,数据中心针对每个任务t可得到下述信息,位置信息loct,任务来源信息appt,任务类型信息tpt;如图3所示,数据中心根据多个任务的任务相关性和时延敏感值进行多个任务图的融合;Step s2: the user uploads the task in the network to the ground data center, and the data center can obtain the following information for each task t, the location information loct , the task source information appt, and the task type information tpt ; as shown in Figure 3, the data center Fusion of multiple task graphs is performed according to task dependencies and delay-sensitive values of multiple tasks;
步骤s2.1:地面数据中心根据任务来源appt,任务类型tpt进行判断,对一个任务t确定其时延敏感值1/2t,同时对该任务赋予一个任务等待值waitt;Step s2.1: The ground data center judges according to the task source appt and the task type tpt , determines its delay sensitivity value 1/2t for a task t, and assigns a task waiting value waitt to the task at the same time;
步骤s2.2:比较任务等待值与时延敏感阈值,如果waitt>ρt,代表任务等待时间已超出容忍程度,直接执行步骤s3,否则执行步骤s2.3,其中,ρt表示时延敏感阈值;Step s2.2: Compare the task waiting value with the delay-sensitive threshold. If waitt >ρt , it means that the task waiting time has exceeded the tolerance level, and step s3 is executed directly; otherwise, step s2.3 is executed, where ρt represents the delay sensitive threshold;
步骤s2.3:地面数据中心对N个任务组成的集合T={t1,t2,…,tN},依据任务请求者所处的位置信息loct、任务来源信息appt多种因素进行分类;目的在于在数据融合前先对有可能融合成功的任务进行预先整合。具体地,Step s2.3: The ground data center sets T= {t1 ,t2 , . Classification; the purpose is to pre-integrate tasks that are likely to be successfully fused before data fusion. specifically,
步骤s2.3.1:如果任务ti和任务tj的任务来源信息为appi和appj,其中i,j∈N,有appi=appj,则将任务ti和任务tj分为一组;Step s2.3.1: If the task source information of task ti and task tj is appi and appj , where i, j∈N, there is appi =appj , then task ti and task tj are divided into one Group;
步骤s2.3.2:对于未被分组的任务,如果任务ti和任务tj的位置来源信息为loci和locj,其中i,j∈N,有|loci-locj|<ε,则将任务ti和任务tj分为一组,其中,ε为任务位置相关性度量,可以进行人为调整;Step s2.3.2: For tasks that are not grouped, if the location source information of task ti and task tj are loci and locj , where i, j∈N, have |loci -locj |<ε, then Divide task ti and task tj into a group, where ε is the task position correlation measure, which can be adjusted manually;
步骤s2.4:对分组后一组中的所有任务进行任务切分,一组任务可表示为包含S个任务集合ST={st1,st2,…,stS}。Step s2.4: Perform task segmentation on all tasks in a group after grouping, and a group of tasks can be expressed as including S task sets ST={st1 , st2 , . . . , stS }.
步骤s2.4.1:以其中的单个任务sti为例,i∈[1,S],任务切分方式在其中间代码级别对其进行分割,可得到一个执行块(子任务)集合BLK={blk1,blk2,…,blkM},一个任务执行块blki可用三元组(body,din,dout)来抽象表达,i∈[1,M],其中body为该执行块的执行体,din为输入数据,dout为输出数据,如某子任务blki的执行体可表示为blki(body)。Step s2.4.1: Taking a single task sti as an example, i∈[1, S], the task segmentation method divides it at the intermediate code level, and an execution block (subtask) set BLK={blk1 ,blk2 , . , din is the input data, and dout is the output data. For example, the execution body of a subtask blki can be expressed as blki (body).
步骤s2.4.2:对于任务sti,在得到任务执行块集合BLK后,根据任务执行块输入数据和输出数据的关系形成一个有向无环图TG(TV,TE)。TG(TV,TE)形成的方式为:TV=BLK,即TG的点集为任务执行块集合,TV={tv1,tv2,…,tvM};从节点tvi到节点tvj的有向边te(tvi,tvj)∈TE,当且仅当
步骤s2.4.3:对于代码块tv∈TV,其具有一定的可量化的数据压缩能力comp(tv),该值代表数据流经过子任务tv后流量率的变化情况,同时子任务tv具有计算存储的需求,被量化为nd(tv)。执行完本步骤后,一个类中将形成多个任务图TG1,TG2,…,TGS。Step s2.4.3: For the code block tv∈TV, it has a certain quantifiable data compression capability comp(tv), and this value represents the change of the traffic rate after the data stream passes through the subtask tv, and the subtask tv has a computational storage , which is quantified as nd(tv). After this step is executed, multiple task graphs TG1 , TG2 , . . . , TGS will be formed in one class.
步骤s2.5:对多个任务图集合{TG1,TG2,…,TGS}进行任务图融合,按照任务图之间的前置执行块是否相同进行融合。融合方式为:从TG1,TG2,…,TGS的任务图的起始节点(任务图的起始节点定义为为该任务图中不存在到该点有向边)开始遍历,如果对于两个任务图TGi和TGj,i,j∈[1,S],TGi的执行块blki和TGj的执行块blkj存在blki(body)=blkj(body),则合并图TGi和TGj得到TG′。合并方式为TG′点集为TGi和TGj点集的并集;TG′边集为TGi和TGj边集的并集,同时将相同代码块连接的边进行合并,示意图如图3所示。融合后图TG′具有点集TV′和边集TE′。Step s2.5: Perform task graph fusion on multiple task graph sets {TG1 , TG2 , ..., TGS }, and perform fusion according to whether the pre-execution blocks between the task graphs are the same. The fusion method is: start traversing from the starting node of the task graph of TG1 , TG2 , ..., TGS (the starting node of the task graph is defined as the directed edge to this point that does not exist in the task graph), if for Two task graphs TGi and TGj , i,j∈[1,S], the execution block blki of TGi and the execution block blkj of TG jexist blki (body)=blkj (body), then merge Graphs TGi and TGj yield TG'. The merging method is that the TG' point set is the union of the TGi and TGj point sets; the TG' edge set is the union of the TGi and TGj edge sets, and the edges connected by the same code block are merged, as shown in Figure 3. shown. The fused graph TG' has a point set TV' and an edge set TE'.
步骤s2.6:在步骤2.5执行完成后,对于未被融合的任务ti,增加其任务等待值
步骤s3:对融合后的任务图进行分组抽象,并量化每个抽象子任务数据压缩率与计算所需资源;Step s3: Group and abstract the fused task graph, and quantify the data compression rate and computing resources required for each abstract subtask;
步骤s3.1:首先依据任务图中子任务执行依赖进行全序分组,如图4的抽象前任务图到抽象后任务图这一过程,具体的方式为:如果任务图TV′中的由某些子任务组成的集合中,包含起始节点(前文已定义),且两个子任务tvi,tvj∈TV′至多有一条边连接。全序任务组是原任务图TG′中的子图,可表示为OG(OV,OE)包含原任务图的部分点集OV和边集OE,即OV∈TV′,OE∈TE′。全序融合的意义在于,如果一组子任务是全序的,从常理上来说该组子任务是密切相关的,且不受其他子任务的影响,将其抽象为一个抽象任务并部署在一个控制域内加快处理。Step s3.1: First perform total order grouping according to the execution dependencies of sub-tasks in the task graph, as shown in Figure 4 from the pre-abstract task graph to the post-abstract task graph. The set composed of these subtasks includes the starting node (defined above), and the two subtasks tvi , tvj ∈ TV′ are connected by at most one edge. The total order task group is a subgraph in the original task graph TG′, which can be expressed as OG(OV, OE), which contains part of the point set OV and edge set OE of the original task graph, namely OV∈TV′, OE∈TE′. The meaning of total order fusion is that if a group of subtasks is totally ordered, the group of subtasks are closely related and are not affected by other subtasks. Speed up processing within the control domain.
步骤s3.2:对每个全序任务组进行抽象,有两个指标,一个为数据压缩率comp,另一个为资源需求量nd,对全序任务组OG(OV,OE)的抽象方法如下:Step s3.2: Abstract each total order task group, there are two indicators, one is the data compression rate comp, the other is the resource demand nd, the abstract method for the total order task group OG (OV, OE) is as follows :
comp(OG)=Πtv∈OVcomp(tv),comp(OG)=Πtv∈OV comp(tv),
nd(OG)=max{nd(tv),tv∈OV},nd(OG)=max{nd(tv), tv∈OV},
分组和抽象完后,原任务图TG′(TV′,TE′)可抽象为新的抽象任务图AG(AV,AE),其中AV表示抽象子任务集合,AE∈TE′。After grouping and abstracting, the original task graph TG′(TV′, TE′) can be abstracted into a new abstract task graph AG(AV, AE), where AV represents the abstract subtask set, AE∈TE′.
步骤s4.对抽象后的任务图进行序列化。任务图是有向无环的,如图5所示,如果一个节点av的输入为多个节点输出,则将这些节点作为输入集合按照comp排序,并按照从小到大的顺序连接,将新的有向边加入AE,并删除原有边。在有序化后AG(AV,AE)变为新的有序抽象任务图SG(SV,SE),其中SV表示抽象子任务集合,且SV=AV,SE为新的有向边集合。Step s4. Serialize the abstracted task graph. The task graph is directed and acyclic. As shown in Figure 5, if the input of a node av is the output of multiple nodes, these nodes are used as the input set and sorted according to comp, and connected in order from small to large, and the new Directed edges are added to AE, and the original edges are deleted. After ordering, AG(AV, AE) becomes a new ordered abstract task graph SG(SV, SE), where SV represents a set of abstract subtasks, and SV=AV, SE is a new set of directed edges.
步骤s5:地面控制中心掌握所管控的多个控制域的网络视图,以GDC(VDC,EDC)表示由多个控制域组成的网络图,GDC为无向图,包括控制域节点集合VDC,以及控制域直接链路集合EDC,结合有序抽象任务图SG(SV,SE)进行传算路径规划和任务部署;Step s5: The ground control center grasps the network view of the multiple control domains under its control, and uses GDC (VDC , EDC ) to represent the network graph composed of multiple control domains, and GDC is an undirected graph, including control domain nodes The set VDC and the control domain direct link set EDC are combined with the ordered abstract task graph SG (SV, SE) to carry out transmission path planning and task deployment;
步骤s5.1:抽象任务处理路径规划阶段,采用下述算法,以源控制域为起点,目标控制域为终点,以路径最小代价为目标规划路径,路径代价描述如下,控制域u,v∈VDC,且其直接连接,路径u到v的代价为Step s5.1: In the path planning stage of abstract task processing, the following algorithm is used, with the source control domain as the starting point, the target control domain as the end point, and the path minimum cost as the goal to plan the path. The path cost is described as follows, the control domain u, v∈ VDC , and it is directly connected, the cost of the path u to v is
wu,v=weight(loadu,v+specu,v),wu, v = weight(loadu, v +specu, v ),
其中weight是一个单调不减的函数,自变量loadu,v和specu,v的增大会导致该条链路的代价增大。loadu,v是该链路当前传输负载,spceu,v为当前链路的重要性度量,该值用来给不同重要性的链路以不同的传输代价。每次循环寻找一个控制域加入路径,不断地积累路径中的控制域,直至路径中的计算和存储资源大于有序抽象任务图SG的所需资源,即大于Πsv∈SVnd(sv)。Among them, weight is a monotonically non-decreasing function, and the independent variables loadu, v and specu, the increase of v will lead to the increase of the cost of the link. loadu, v is the current transmission load of the link, spceu, v is the importance measure of the current link, and this value is used to give different transmission costs to links of different importance. Each loop finds a control domain to join the path, and continuously accumulates the control domains in the path until the computing and storage resources in the path are greater than the required resources of the ordered abstract task graph SG, that is, greater than Π sv∈ SV nd(sv).
以第i次循环为例,从已找到的执行节点vi开始,vi∈VDC,以上述的最小路径成本为度量,找到下一个执行节点vj,同时将两个节点之间的路径添加到路由路径中。如果已经寻找到了足够的节点用于计算,则停止迭代。步骤s5.1完成后得到了一个从路径源点到目标点的最小化代价路径PATHDC(PVDC,PEDC),PATHDC是一个有向无环图,且是网络图GDC(VDC,EDC)的子集。且该路径上的资源足够处理即将部署的多个抽象子任务。Taking the i-th cycle as an example, starting from the found execution node vi, vi∈ VDC , using the above minimum path cost as the metric, find the next execution node vj , and at the same time connect the path between the two nodes. added to the routing path. Stop iteration if enough nodes have been found for computation. After the completion of step s5.1, a cost-minimizing path PATHDC (PVDC , PEDC ) from the path source point to the target point is obtained, PATHDC is a directed acyclic graph, and is a network graph GDC (VDC ) , a subset ofEDC ). And the resources on this path are sufficient to handle the multiple abstract subtasks to be deployed.
步骤s5.2:抽象任务部署阶段,在第一阶段确定路由路径后,以每一步的部署代价最小化为目标,贪心地依次部署每一个抽象任务。现有全序抽象任务图SG(SV,SE),抽象子任务共有size(SV)个。在PATHDC(PVDC,PEDC)上的节点vi部署全序抽象任务图中的第j个任务时,从节点vi到vi+1链路的代价为:Step s5.2: In the abstract task deployment stage, after the routing path is determined in the first stage, with the goal of minimizing the deployment cost of each step, each abstract task is greedily deployed in turn. The existing total order abstract task graph SG(SV, SE) has a total of size(SV) abstract subtasks. When node vi on PATHDC (PVDC , PEDC ) deploys the jth task in the total-order abstract task graph, the cost of the link from node vi to vi+1 is:

其中,

以第j个任务的部署为例,依次以从第j-1个任务部署位置之后的PATH中节点为第j个任务的部署节点,计算新代价,以其中最小代价部署位置为最优位置,放入有序集合location中,location中元素与SG(SV,SE)中节点顺序对应。Taking the deployment of the jth task as an example, take the node in the PATH after the j-1th task deployment position as the deployment node of the jth task, calculate the new cost, and take the minimum cost deployment position as the optimal position, Put it into the ordered set location, and the elements in the location correspond to the order of the nodes in the SG (SV, SE).
步骤s5.3:根据求出的部署位置location和对应全序任务图SG(SV,SE),对子任务或者子任务组下发至超控域,同时下发流表来控制每个控制域数据的流向。Step s5.3: According to the obtained deployment location location and the corresponding total sequence task graph SG (SV, SE), the subtasks or subtask groups are sent to the super-control domain, and the flow table is issued to control each control domain. data flow.
步骤s6:控制器在收到抽象任务之后,根据所管控的超控域网络视图对每个任务组进行传算路径规划;Step s6: After the controller receives the abstract task, it plans the transmission path for each task group according to the network view of the super-control domain that it controls;
步骤s6.1:对从控制中心分发下来的抽象任务进行拆解,还原为全序任务组OG(OV,OE);Step s6.1: Disassemble the abstract tasks distributed from the control center and restore them to the total order task group OG (OV, OE);
步骤s6.2:任务处理路径规划阶段,控制器已知本网络拓扑,用GC(VC,EC)表示,包括执行节点集合VC,执行节点链路集合EC,同时根据数据中心下发的流表确定控制域中的传输路径源点和目标节点。以路径最小代价为目标规划路径,路径代价描述如下,执行节点u,v∈VC,且直接连接,节点u到v的路径代价为weight(loadu,v+specu,v),其中weight是一个单调不减函数。loadu,v是该链路当前传输负载,specu,v为当前链路的重要性度量,该值用来给不同重要性的链路以不同的传输代价。每次循环寻找一个执行节点加入路径,不断地积累路径,直至路径中的计算和存储资源大于全序任务组OG(OV,OE)中所有子任务所需资源,即大于Πov∈oVnd(ov)。最终得到了一个从路径源点到目标点的最小化代价路径PATHC(PVC,PEC),PATHC是一个有向无环图,且是控制域网络图GC(VC,EC)的子集。且该路径上的资源足够处理即将部署的多个子任务。Step s6.2: In the task processing path planning stage, the controller knows the topology of the network, which is represented by GC (VC , EC ), including the execution node set VC , the execution node link set EC , and at the same time according to the data center The distributed flow table determines the source and destination nodes of the transmission path in the control domain. The path is planned with the minimum cost of the path as the goal. The path cost is described as follows. The node u,v∈VC is executed and directly connected. The path cost from node u to v is weight (loadu, v +specu, v ), where weight is a monotone invariant function. loadu, v is the current transmission load of the link, specu, v is the importance measure of the current link, and this value is used to give different transmission costs to links of different importance. Each loop finds an execution node to join the path, and continuously accumulates the path until the computing and storage resources in the path are greater than the resources required by all subtasks in the total order task group OG(OV, OE), that is, greater than Πov ∈ oV nd ( ov). Finally, a minimum cost path PATHC (PVC , PEC ) from the path source point to the target point is obtained, PATHC is a directed acyclic graph, and is a control domain network graph GC (VC , EC ) ) subset. And the resources on this path are sufficient to handle the multiple subtasks to be deployed.
步骤s6.3:任务部署阶段,在步骤s6.2确定路由路径后,以每一步的部署代价最小化为目标,贪心地依次部署每一个任务。现有全序任务图OG(OV,OE),子任务共有size(OV)个。在PATHC(PVC,PEC)上的节点vi部署全序任务图中的第j个任务时(j<size(OV)),从节点vi到vi+1链路的代价为:Step s6.3: In the task deployment stage, after the routing path is determined in step s6.2, with the goal of minimizing the deployment cost of each step, each task is greedily deployed in turn. The existing total order task graph OG(OV, OE) has a total of size(OV) subtasks. When node vi on PATHC (PVC , PEC ) deploys the jth task in the total-order task graph (j < size(OV)), the cost of the link from node vi to vi+1 is :

其中,

以第j个任务的部署为例,依次以从第j-1个任务部署位置之后的PATH中节点为下一个部署节点,计算新代价,以其中最小代价部署位置为最优位置,放入有序集合locationc中,locationc中元素与OG(OV,OE)中节点顺序对应。Taking the deployment of the jth task as an example, take the node in the PATH after the j-1th task deployment position as the next deployment node, calculate the new cost, take the minimum cost deployment position as the optimal position, and put the In the sequence set locationc , the elements in locationc correspond to the order of nodes in OG(OV, OE).
步骤s7:执行节点在接收到子任务后,按照控制节点下发的计算策略和流表进行任务的计算和传输。Step s7: After receiving the subtask, the execution node performs task calculation and transmission according to the calculation strategy and flow table issued by the control node.
根据上述发明技术实现的软件定义天地一体化信息网络中多源数据融合处理系统,如图2所示,包括以下模块:The multi-source data fusion processing system in the software-defined space-earth integrated information network implemented according to the above-mentioned inventive technology, as shown in Figure 2, includes the following modules:
网络实时管控模块:对各个层次的网络状态及资源进行整合,每个区域以抽象节点的形式被上层节点控制;Network real-time management and control module: Integrate network status and resources at all levels, and each area is controlled by upper-level nodes in the form of abstract nodes;
任务融合模块:根据多任务的相关度、以及时延敏感度进行任务图融合;Task fusion module: perform task graph fusion according to multi-task correlation and delay sensitivity;
任务处理模块:对融合后的任务图进行分组,然后对每组任务进行序列化,最后对子任务组进行相关数据的抽象;Task processing module: Group the fused task graphs, then serialize each group of tasks, and finally abstract the relevant data for the sub-task groups;
路径计算模块:每一层的控制节点根据子任务组的资源需求,任务源节点和任务目标节点继续路由路径规划;Path calculation module: The control node of each layer continues routing path planning according to the resource requirements of the sub-task group, the task source node and the task target node;
任务部署模块:每一层的控制节点根据子任务或子任务组的数据压缩率,以模块4计算出的路径为任务放置路径,并以最小化链路代价为目标放置子任务;Task deployment module: The control node of each layer takes the path calculated by module 4 as the task placement path according to the data compression rate of the subtask or subtask group, and places the subtask with the goal of minimizing the link cost;
传算执行模块:位于传算执行层的传算节点在收到上级控制器发来的传算信令后,执行相应的子任务计算和数据传输。Transmission execution module: The transmission node at the transmission execution layer executes the corresponding subtask calculation and data transmission after receiving the transmission signaling sent by the upper-level controller.
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。Those skilled in the art know that, in addition to implementing the system, device and each module provided by the present invention in the form of pure computer readable program code, the system, device and each module provided by the present invention can be completely implemented by logically programming the method steps. The same program is implemented in the form of logic gates, switches, application specific integrated circuits, programmable logic controllers, and embedded microcontrollers, among others. Therefore, the system, device and each module provided by the present invention can be regarded as a kind of hardware component, and the modules used for realizing various programs included in it can also be regarded as the structure in the hardware component; A module for realizing various functions can be regarded as either a software program for realizing a method or a structure within a hardware component.
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。Specific embodiments of the present invention have been described above. It should be understood that the present invention is not limited to the above-mentioned specific embodiments, and those skilled in the art can make various changes or modifications within the scope of the claims, which do not affect the essential content of the present invention. The embodiments of the present application and features in the embodiments may be combined with each other arbitrarily, provided that there is no conflict.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111495136.0ACN114499624B (en) | 2021-12-08 | 2021-12-08 | Multi-source data fusion processing method and system in heaven-earth integrated information network |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111495136.0ACN114499624B (en) | 2021-12-08 | 2021-12-08 | Multi-source data fusion processing method and system in heaven-earth integrated information network |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114499624Atrue CN114499624A (en) | 2022-05-13 |
| CN114499624B CN114499624B (en) | 2022-12-13 |
Family
ID=81491976
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111495136.0AActiveCN114499624B (en) | 2021-12-08 | 2021-12-08 | Multi-source data fusion processing method and system in heaven-earth integrated information network |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114499624B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115833912A (en)* | 2022-11-17 | 2023-03-21 | 中国船舶集团有限公司第七〇九研究所 | Marine satellite emission command control system and method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106685511A (en)* | 2016-11-02 | 2017-05-17 | 北京邮电大学 | A Spatial Information Network Architecture |
| CN107180309A (en)* | 2017-05-31 | 2017-09-19 | 中南大学 | The collaborative planning method of resource is observed in a kind of empty world |
| CN111342993A (en)* | 2020-02-03 | 2020-06-26 | 西安交通大学 | A deployment architecture and control method of SDN-based air-space-ground controller |
| CN113346938A (en)* | 2021-05-20 | 2021-09-03 | 天地信息网络有限公司 | Edge computing resource fusion management method for air-space-ground integrated network |
| WO2021221736A2 (en)* | 2020-05-01 | 2021-11-04 | Intel Corporation | Edge computing in satellite connectivity environments |
- 2021
- 2021-12-08CNCN202111495136.0Apatent/CN114499624B/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106685511A (en)* | 2016-11-02 | 2017-05-17 | 北京邮电大学 | A Spatial Information Network Architecture |
| CN107180309A (en)* | 2017-05-31 | 2017-09-19 | 中南大学 | The collaborative planning method of resource is observed in a kind of empty world |
| CN111342993A (en)* | 2020-02-03 | 2020-06-26 | 西安交通大学 | A deployment architecture and control method of SDN-based air-space-ground controller |
| WO2021221736A2 (en)* | 2020-05-01 | 2021-11-04 | Intel Corporation | Edge computing in satellite connectivity environments |
| CN113346938A (en)* | 2021-05-20 | 2021-09-03 | 天地信息网络有限公司 | Edge computing resource fusion management method for air-space-ground integrated network |
Non-Patent Citations (1)
| Title |
|---|
| 王之等: ""天基信息港的多源信息融合任务调度研究"", 《中国空间科学技术》* |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115833912A (en)* | 2022-11-17 | 2023-03-21 | 中国船舶集团有限公司第七〇九研究所 | Marine satellite emission command control system and method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114499624B (en) | 2022-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108880663B (en) | Space-ground integrated network resource allocation method based on improved genetic algorithm | |
| CN115002123B (en) | System and method for rapidly adapting task offloading based on mobile edge computation | |
| Arkhipov et al. | A parallel genetic algorithm framework for transportation planning and logistics management | |
| CN110297699A (en) | Dispatching method, scheduler, storage medium and system | |
| CN111385202A (en) | Route distribution method based on virtual network function | |
| Han et al. | Task scheduling of high dynamic edge cluster in satellite edge computing | |
| Renart et al. | Distributed operator placement for iot data analytics across edge and cloud resources | |
| CN108985709A (en) | Workflow management method towards more satellite data centers collaboration Remote Sensing Products production | |
| CN110119399A (en) | Work Flow Optimizing method based on machine learning | |
| WO2021228264A1 (en) | Machine learning application method, device, electronic apparatus, and storage medium | |
| CN110113761A (en) | Dispositions method and device in edge calculations network are applied in a kind of processing of flow data | |
| CN103116525A (en) | Map reduce computing method under internet environment | |
| Avasalcai et al. | EdgeFlow—Developing and deploying latency-sensitive IoT edge applications | |
| CN117667344A (en) | A workflow scheduling method in multi-cloud environment under cost constraints | |
| Shen et al. | Asynchronous Federated Deep-Reinforcement-Learning-Based Dependency Task Offloading for UAV-Assisted Vehicular Networks | |
| CN114499624B (en) | Multi-source data fusion processing method and system in heaven-earth integrated information network | |
| CN112130927A (en) | A reliability-enhanced task offloading method for mobile edge computing | |
| Liu et al. | On distributed computation rate optimization for deploying cloud computing programming frameworks | |
| CN119519807A (en) | A satellite group management system for satellite cloud computing Internet platform | |
| CN113010296A (en) | Task analysis and resource allocation method and system based on formalized model | |
| CN120029747A (en) | Computing power scheduling method and device | |
| Qiao | Routing optimization algorithm for logistics virtual monitoring based on VNF dynamic deployment | |
| CN112398917A (en) | Real-time task scheduling method and device for multi-station fusion architecture | |
| Barika et al. | Adaptive scheduling for efficient execution of dynamic stream workflows | |
| CN110868461A (en) | A data distribution method for heterogeneous bandwidth between nodes in Gaia cluster |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |