CN114445436A - A method, device and storage medium for target detection - Google Patents
A method, device and storage medium for target detectionDownload PDFInfo
- Publication number
- CN114445436A CN114445436ACN202111628161.1ACN202111628161ACN114445436ACN 114445436 ACN114445436 ACN 114445436ACN 202111628161 ACN202111628161 ACN 202111628161ACN 114445436 ACN114445436 ACN 114445436A
- Authority
- CN
- China
- Prior art keywords
- image
- feature
- detected
- noise reduction
- network
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/20—Image enhancement or restoration using local operators
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Computational Linguistics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Biomedical Technology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明属于计算机视觉、模式识别以及目标检测技术领域,尤其涉及一种目标检测的方法、装置以及存储介质。The invention belongs to the technical fields of computer vision, pattern recognition and target detection, and in particular relates to a method, a device and a storage medium for target detection.
背景技术Background technique
传统的目标检测方案基于手工特征提取,具有较强的可解释性,但是泛化能力较差。近年来取得较好性能的目标检测方案,如Mask RCNN、YOLO等,都是基于深度学习的方法来实现。基于深度学习的目标检测方案利用卷积神经网络CNN进行特征提取,能够达到较好的检测性能,但是使用CNN提取的特征通常缺少可解释性,提取的特征可能会带有噪声,会对检测的性能造成负面影响。The traditional object detection scheme is based on manual feature extraction, which has strong interpretability but poor generalization ability. The target detection schemes that have achieved better performance in recent years, such as Mask RCNN, YOLO, etc., are all based on deep learning methods. The target detection scheme based on deep learning uses convolutional neural network CNN for feature extraction, which can achieve better detection performance, but the features extracted by CNN usually lack interpretability, and the extracted features may be noisy, which will affect the detection performance. performance is negatively affected.
如上所述,现有的目标检测方案所存在的缺点主要有:As mentioned above, the shortcomings of existing target detection schemes mainly include:
1、传统的目标检测方案的鲁棒性较差;1. The robustness of the traditional target detection scheme is poor;
2、利用CNN设计的目标检测方案提取出的特征缺乏可解释性,并具有噪声,会影响检测的精度。2. The features extracted by the target detection scheme designed by CNN lack interpretability and have noise, which will affect the detection accuracy.
发明内容SUMMARY OF THE INVENTION
为了克服如上所述的技术问题,本发明提出一种目标检测的方法,所述方法的技术方案如下:In order to overcome the above-mentioned technical problems, the present invention proposes a method for target detection, and the technical scheme of the method is as follows:
S1,获取待检测图像;S1, obtain the image to be detected;
S2,对所述待检测图像进行边缘检测处理,得到第一图像;S2, performing edge detection processing on the to-be-detected image to obtain a first image;
S3,通过预设的特征提取网络对所述待检测图像进行处理,得到所述待检测图像的第二图像,使用所述第一图像对所述第二图像进行处理,增强所述第二图像的边缘特征;S3: Process the to-be-detected image through a preset feature extraction network to obtain a second image of the to-be-detected image, and use the first image to process the second image to enhance the second image edge features;
S4,所述预设的特征提取网络包含特征降噪模块,使用所述特征降噪模块对所述增强边缘特征的第二图像进行降噪处理;S4, the preset feature extraction network includes a feature noise reduction module, and uses the feature noise reduction module to perform noise reduction processing on the second image of the enhanced edge feature;
S5,使用所述预设的特征提取网络对所述降噪处理后的第二图像进行处理,得到图像特征,将所述图像特征输入预设的目标检测网络,得到目标类别和目标框。S5 , using the preset feature extraction network to process the second image after noise reduction to obtain image features, and input the image features to a preset target detection network to obtain a target category and a target frame.
进一步的,所述对待检测图像进行边缘检测处理,得到第一图像,具体为:使用索贝尔算子对待检测图像进行边缘检测,得到所述第一图像。Further, performing edge detection processing on the image to be detected to obtain the first image, specifically: using a Sobel operator to perform edge detection on the image to be detected to obtain the first image.
进一步的,所述索贝尔算子的边缘检测公式如下:Further, the edge detection formula of the Sobel operator is as follows:

其中,I为所述待检测图像,Ex为所述待检测图像的纵向边缘图像,Ey为所述待检测图像的横向边缘图像,E为所述第一图像。Wherein, I is the image to be detected, Ex is the vertical edge image of the image to be detected, Ey is the horizontal edge image of the image to be detected, and E is the first image.
进一步的,所述预设的特征提取网络采用特征金字塔网络实现。Further, the preset feature extraction network is implemented by a feature pyramid network.
进一步的,所述步骤S3具体为:在所述特征金字塔网络的下采样部分输出所述第二图像,对所述第一图像进行下采样和卷积,生成注意力图像,使用所述注意力图像增强所述第二图像的边缘特征。Further, the step S3 is specifically: outputting the second image in the downsampling part of the feature pyramid network, downsampling and convolving the first image, generating an attention image, and using the attention Image enhancement of edge features of the second image.
进一步的,所述步骤S5中使用所述预设的特征提取网络对所述降噪处理后的第二图像进行处理,得到图像特征,具体为:在所述特征金字塔网络的上采样部分输出特征图像,使用所述降噪处理后的第二图像对所述特征图像进行拼接,对拼接后的特征图像进行处理,得到所述图像特征。Further, in the step S5, using the preset feature extraction network to process the second image after the noise reduction processing to obtain image features, specifically: outputting features in the upsampling part of the feature pyramid network image, using the second image after noise reduction processing to splicing the feature image, and processing the spliced feature image to obtain the image feature.
进一步的,所述特征降噪模块基于非局部均值算法实现。Further, the feature noise reduction module is implemented based on a non-local mean algorithm.
进一步的,所述预设的目标检测网络采用以下其中一种方式实现:RCNN、FastRCNN、Faster RCNN、Mask RCNN。Further, the preset target detection network is implemented in one of the following ways: RCNN, FastRCNN, Faster RCNN, and Mask RCNN.
本发明还提出一种目标检测的装置,所述目标检测的装置存储计算机指令;所述计算机指令在目标检测的装置执行如上述任一项所述的目标检测的方法。The present invention also provides a target detection device, the target detection device stores computer instructions; the computer instructions execute the target detection method according to any one of the above in the target detection device.
本发明还提出了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如上述任一项所述的目标检测的方法。The present invention also provides a computer-readable storage medium, where the computer-readable storage medium stores computer instructions, and the computer instructions cause the computer to execute the target detection method according to any one of the above.
本发明提供的技术方案带来的有益效果是:The beneficial effects brought by the technical scheme provided by the invention are:
本发明的一种目标检测的方法和装置,能够提升基于深度学习神经网络的特征提取网络的特征提取能力,以及目标检测网络的目标检测能力,进一步的,能够显著提升检测车辆的性能。The method and device for target detection of the present invention can improve the feature extraction capability of a feature extraction network based on a deep learning neural network, as well as the target detection capability of a target detection network, and further, can significantly improve the performance of detecting vehicles.
附图说明Description of drawings
图1为本发明实施例的一种目标检测的流程图;1 is a flowchart of a target detection according to an embodiment of the present invention;
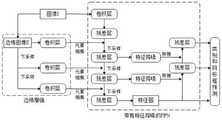
图2为本发明实施例的一种使用特征提取网络实现目标检测的框架结构图;Fig. 2 is a kind of framework structure diagram of using feature extraction network to realize target detection according to an embodiment of the present invention;
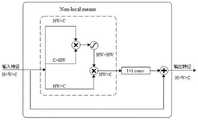
图3为本发明实施例的一种使用非局部均值算法的特征降噪模块的结构示意图;3 is a schematic structural diagram of a feature noise reduction module using a non-local mean algorithm according to an embodiment of the present invention;
图4为本发明实施例所涉及的一种目标检测的装置结构示意图。FIG. 4 is a schematic structural diagram of a device for target detection according to an embodiment of the present invention.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
实施例一:Example 1:
如图1所示为本发明实施例的一种目标检测的流程图,示出了该方法的具体实施步骤,包括:FIG. 1 is a flow chart of a target detection according to an embodiment of the present invention, showing the specific implementation steps of the method, including:
S1,获取待检测图像;S1, obtain the image to be detected;
S2,对所述待检测图像进行边缘检测处理,得到第一图像;S2, performing edge detection processing on the to-be-detected image to obtain a first image;
S3,通过预设的特征提取网络对所述待检测图像进行处理,得到所述待检测图像的第二图像,使用所述第一图像对所述第二图像进行处理,增强所述第二图像的边缘特征;S3: Process the to-be-detected image through a preset feature extraction network to obtain a second image of the to-be-detected image, and use the first image to process the second image to enhance the second image edge features;
S4,所述预设的特征提取网络包含特征降噪模块,使用所述特征降噪模块对所述增强边缘特征的第二图像进行降噪处理;S4, the preset feature extraction network includes a feature noise reduction module, and uses the feature noise reduction module to perform noise reduction processing on the second image of the enhanced edge feature;
S5,使用所述预设的特征提取网络对所述降噪处理后的第二图像进行处理,得到图像特征,将所述图像特征输入预设的目标检测网络,得到目标类别和目标框。S5 , using the preset feature extraction network to process the second image after noise reduction to obtain image features, and input the image features to a preset target detection network to obtain a target category and a target frame.
具体的,所述对待检测图像进行边缘检测处理,得到第一图像,具体为:使用索贝尔算子对待检测图像进行边缘检测,得到所述第一图像。Specifically, performing edge detection processing on the image to be detected to obtain the first image, specifically: using a Sobel operator to perform edge detection on the image to be detected to obtain the first image.
具体的,所述索贝尔算子的边缘检测公式如下:Specifically, the edge detection formula of the Sobel operator is as follows:

其中,I为所述待检测图像,Ex为所述待检测图像的纵向边缘图像,Ey为所述待检测图像的横向边缘图像,E为所述第一图像。Wherein, I is the image to be detected, Ex is the vertical edge image of the image to be detected, Ey is the horizontal edge image of the image to be detected, and E is the first image.
具体的,所述预设的特征提取网络采用特征金字塔网络实现。Specifically, the preset feature extraction network is implemented by a feature pyramid network.
具体的,所述步骤S3具体为:在所述特征金字塔网络的下采样部分输出所述第二图像,对所述第一图像进行下采样和卷积,生成注意力图像,使用所述注意力图像增强所述第二图像的边缘特征。Specifically, the step S3 is specifically: outputting the second image in the downsampling part of the feature pyramid network, performing downsampling and convolution on the first image, generating an attention image, and using the attention Image enhancement of edge features of the second image.
具体的,所述步骤S5中使用所述预设的特征提取网络对所述降噪处理后的第二图像进行处理,得到图像特征,具体为:在所述特征金字塔网络的上采样部分输出特征图像,使用所述降噪处理后的第二图像对所述特征图像进行拼接,对拼接后的特征图像进行处理,得到所述图像特征。Specifically, in the step S5, the preset feature extraction network is used to process the second image after noise reduction to obtain image features, specifically: outputting features in the upsampling part of the feature pyramid network image, using the second image after noise reduction processing to splicing the feature image, and processing the spliced feature image to obtain the image feature.
具体的,所述特征降噪模块基于非局部均值算法实现。Specifically, the feature noise reduction module is implemented based on a non-local mean algorithm.
具体的,所述预设的目标检测网络采用以下其中一种方式实现:RCNN、Fast RCNN、Faster RCNN、Mask RCNN。Specifically, the preset target detection network is implemented in one of the following ways: RCNN, Fast RCNN, Faster RCNN, and Mask RCNN.
实施例二:Embodiment 2:
本实施例是在实施例一的一种目标检测的方法基础上,介绍一个本发明的应用实例。This embodiment introduces an application example of the present invention on the basis of the target detection method of the first embodiment.
如图2所示为本发明实施例的一种使用特征提取网络实现目标检测的框架结构图,示出了本实施例的具体步骤:首先将图像I作为待检测图像,对待检测图像进行边缘增强,得到边缘图像E;对所述边缘图像E进行下采样和卷积操作,得到注意力图像;使用特征金字塔网络(Feature Pyramid Networks,FPN)实现特征提取网络,特征提取网络包括卷积层、残差层、下采样和上采样等网络模块;输入待检测图像;特征提取网络的下采样部分输出待检测图像的特征图像,在每次下采样前使用注意力图像增强特征图像的边缘特征,将增强边缘特征后的特征图像输入下采样部分的残差层;在特征提取网络的横向连接部分添加特征降噪模块,特征降噪模块用于抑制特征提取网络的横向连接部分输出的特征图像的噪音;将抑制噪声后的特征图像与特征提取网络的上采样部分输出的特征图像进行拼接,将拼接后的特征图像输入上采样部分的残差层,上采样部分的残差层输出待检测图像的图像特征;将待检测图像的图像特征输入目标检测网络,得到目标类别和目标框。FIG. 2 is a frame structure diagram of using a feature extraction network to realize target detection according to an embodiment of the present invention, showing the specific steps of this embodiment: first, image I is used as an image to be detected, and edge enhancement is performed on the image to be detected. , obtain an edge image E; perform downsampling and convolution operations on the edge image E to obtain an attention image; use a feature pyramid network (Feature Pyramid Networks, FPN) to realize a feature extraction network, which includes a convolution layer, residual Network modules such as difference layer, downsampling and upsampling; input the image to be detected; the downsampling part of the feature extraction network outputs the feature image of the image to be detected, and uses the attention image to enhance the edge features of the feature image before each downsampling. The feature image after enhancing the edge features is input to the residual layer of the down-sampling part; the feature noise reduction module is added to the horizontal connection part of the feature extraction network, and the feature noise reduction module is used to suppress the noise of the feature image output by the horizontal connection part of the feature extraction network. ; Splicing the feature image after noise suppression with the feature image output by the upsampling part of the feature extraction network, and inputting the spliced feature image into the residual layer of the upsampling part, and the residual layer of the upsampling part outputs the image to be detected. Image features; input the image features of the image to be detected into the target detection network to obtain the target category and target frame.
对待检测图像进行边缘增强,得到边缘图像E的具体方法是使用索贝尔算子对待检测图像进行纵向和横向边缘检测。索贝尔算子的边缘检测公式如下:The specific method of performing edge enhancement on the image to be detected to obtain the edge image E is to use the Sobel operator to perform vertical and horizontal edge detection on the image to be detected. The edge detection formula of the Sobel operator is as follows:

其中,I为待检测图像,Ex为待检测图像的纵向边缘图像,Ey为待检测图像的横向边缘图像,E为待检测图像的边缘图像。Wherein, I is the image to be detected, Ex is the vertical edge image of the image to be detected, Ey is the horizontal edge image of the image to be detected, and E is the edge image of the image to be detected.
所述特征降噪模块采用非局部均值算法(Non-local means,NL-means)实现,图3示出了一种使用非局部均值算法的特征降噪模块的结构示意图,特征降噪模块对输入特征的降噪处理过程具体为:输入特征为H*W*C,首先将输入特征H*W*C转换成向量分别得到第一向量HW*C,第二向量HW*C,第三向量HW*C,对第二向量HW*C进行转置得到第四向量C*HW,将第一向量HW*C和第四向量C*HW矩阵相乘得到第一矩阵HW*HW,对第一矩阵HW*HW做进一步处理,并与第三向量HW*C相乘,得到第五向量HW*C,将第五向量HW*C转换成第二矩阵H*W*C,对第二矩阵H*W*C进行1*1卷积,然后与输入特征H*W*C进行像素点的加和,得到降噪处理后的输出特征H*W*C;其中,H为输入特征的高度,W为输入特征的宽度,C为通道数量,对第一矩阵HW*HW做进一步处理的一种实现方式是使用Softmax函数对第一矩阵HW*HW进行计算。The feature noise reduction module adopts the non-local means algorithm (Non-local means, NL-means) to realize, Fig. 3 shows a kind of structural schematic diagram of the feature noise reduction module using the non-local mean algorithm, the feature noise reduction module is to input The noise reduction process of the feature is as follows: the input feature is H*W*C, first convert the input feature H*W*C into a vector to obtain the first vector HW*C, the second vector HW*C, the third vector HW *C, transpose the second vector HW*C to obtain the fourth vector C*HW, multiply the first vector HW*C and the fourth vector C*HW matrix to obtain the first matrix HW*HW, and the first matrix HW*HW is further processed and multiplied with the third vector HW*C to obtain the fifth vector HW*C, the fifth vector HW*C is converted into the second matrix H*W*C, and the second matrix H* W*C performs 1*1 convolution, and then adds the pixel points with the input feature H*W*C to obtain the output feature H*W*C after noise reduction; where H is the height of the input feature, W is the width of the input feature, C is the number of channels, and one implementation of further processing the first matrix HW*HW is to use the Softmax function to calculate the first matrix HW*HW.
目标检测网络使用以下其中一种方式实现:R-CNN、Fast R-CNN、Faster R-CNN、Mask RCNN。The object detection network is implemented in one of the following ways: R-CNN, Fast R-CNN, Faster R-CNN, Mask RCNN.
需要说明的是,上述目标检测网络的实现方式并不作为本发明的限制,在其他实施例中,可以选择不同的实现方式。It should be noted that the implementation manner of the above target detection network is not a limitation of the present invention, and in other embodiments, different implementation manners may be selected.
实施例三:Embodiment three:
本发明还提供一种目标检测的装置,如图4所示,该装置包括处理器401、存储器402、总线403、以及存储在存储器402中并可在处理器401上运行的计算机程序,处理器401包括一个或一个以上处理核心,存储器402通过总线403与处理器401相连,存储器402用于存储程序指令,处理器执行计算机程序时实现本发明的上述方法实施例中的步骤。The present invention also provides an apparatus for target detection. As shown in FIG. 4 , the apparatus includes a
进一步地,作为一个可执行方案,目标检测的装置可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。系统/电子设备可包括,但不仅限于,处理器、存储器。本领域技术人员可以理解,上述系统/电子设备的组成结构仅仅是系统/电子设备的示例,并不构成对系统/电子设备的限定,可以包括比上述更多或更少的部件,或者组合某些部件,或者不同的部件。例如所述系统/电子设备还可以包括输入输出设备、网络接入设备、总线等,本发明实施例对此不做限定。Further, as an executable solution, the device for target detection may be a computing device such as a desktop computer, a notebook computer, a palmtop computer, and a cloud server. The system/electronic device may include, but is not limited to, a processor, memory. Those skilled in the art can understand that the composition structure of the above system/electronic device is only an example of the system/electronic device, and does not constitute a limitation to the system/electronic device, and may include more or less components than the above, or a combination of certain some parts, or different parts. For example, the system/electronic device may further include an input/output device, a network access device, a bus, etc., which is not limited in this embodiment of the present invention.
进一步地,作为一个可执行方案,所称处理器可以是中央处理单元(CentralProcessing Unit,CPU),还可以是其他通用处理器、数字信号处理器(Digital SignalProcessor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等,所述处理器是所述系统/电子设备的控制中心,利用各种接口和线路连接整个系统/电子设备的各个部分。Further, as an executable solution, the so-called processor may be a central processing unit (Central Processing Unit, CPU), and may also be other general-purpose processors, digital signal processors (Digital Signal Processors, DSP), application specific integrated circuits (Application Specific Integrated Circuits) Integrated Circuit, ASIC), off-the-shelf Programmable Gate Array (Field-Programmable Gate Array, FPGA) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, etc. The general-purpose processor can be a microprocessor or the processor can also be any conventional processor, etc. The processor is the control center of the system/electronic device, and uses various interfaces and lines to connect the entire system/electronic device. various parts.
所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现所述系统/电子设备的各种功能。所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序;存储数据区可存储根据手机的使用所创建的数据等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(SecureDigital,SD)卡,闪存卡(Flash Card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。The memory can be used to store the computer program and/or module, and the processor implements the system by running or executing the computer program and/or module stored in the memory and calling the data stored in the memory / Various functions of electronic equipment. The memory may mainly include a storage program area and a storage data area, wherein the storage program area may store an operating system and an application program required for at least one function; the storage data area may store data created according to the use of the mobile phone, and the like. In addition, the memory may include high-speed random access memory, and may also include non-volatile memory, such as hard disk, internal memory, plug-in hard disk, Smart Media Card (SMC), Secure Digital (SD) card, Flash Card, at least one magnetic disk storage device, flash memory device, or other volatile solid state storage device.
实施例四:Embodiment 4:
本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例上述方法的步骤。The present invention further provides a computer-readable storage medium, where a computer program is stored in the computer-readable storage medium, and when the computer program is executed by a processor, the steps of the foregoing method in the embodiment of the present invention are implemented.
所述系统/电子设备集成的模块/单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质可以包括:能够携带所述计算机程序代码的任何实体或装置、记录介质、U盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(ROM,Read-Onny Memory)、随机存取存储器(RAM,Random Access Memory)以及软件分发介质等。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减。If the modules/units integrated in the system/electronic device are implemented in the form of software functional units and sold or used as independent products, they may be stored in a computer-readable storage medium. Based on this understanding, the present invention can implement all or part of the processes in the methods of the above embodiments, and can also be completed by instructing relevant hardware through a computer program, and the computer program can be stored in a computer-readable storage medium. When the program is executed by the processor, the steps of the foregoing method embodiments can be implemented. Wherein, the computer program includes computer program code, and the computer program code may be in the form of source code, object code, executable file or some intermediate form, and the like. The computer-readable medium may include: any entity or device capable of carrying the computer program code, a recording medium, a U disk, a removable hard disk, a magnetic disk, an optical disk, a computer memory, a read-only memory (ROM, Read-Onny Memory) , Random Access Memory (RAM, Random Access Memory), and software distribution media. It should be noted that, the content contained in the computer-readable medium may be appropriately increased or decreased according to the requirements of legislation and patent practice in the jurisdiction.
尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。Although the present invention has been particularly shown and described in connection with preferred embodiments, it will be understood by those skilled in the art that changes in form and detail may be made to the present invention without departing from the spirit and scope of the invention as defined by the appended claims. Various changes are made within the protection scope of the present invention.
Claims (10)
Translated fromChinese
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111628161.1ACN114445436B (en) | 2021-12-28 | 2021-12-28 | A method, device and storage medium for target detection |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111628161.1ACN114445436B (en) | 2021-12-28 | 2021-12-28 | A method, device and storage medium for target detection |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114445436Atrue CN114445436A (en) | 2022-05-06 |
| CN114445436B CN114445436B (en) | 2025-04-11 |
Family
ID=81366506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111628161.1AActiveCN114445436B (en) | 2021-12-28 | 2021-12-28 | A method, device and storage medium for target detection |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114445436B (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080253678A1 (en)* | 2007-04-10 | 2008-10-16 | Arcsoft, Inc. | Denoise method on image pyramid |
| CN112329610A (en)* | 2020-11-03 | 2021-02-05 | 中科九度(北京)空间信息技术有限责任公司 | High-voltage line detection method based on edge attention mechanism fusion network |
| CN113034408A (en)* | 2021-04-30 | 2021-06-25 | 广东工业大学 | Infrared thermal imaging deep learning image denoising method and device |
| CN113077420A (en)* | 2021-03-19 | 2021-07-06 | 江南大学 | Fish fiber evaluation method and system based on convolutional neural network |
| CN113129278A (en)* | 2021-04-06 | 2021-07-16 | 华东师范大学 | X-Ray picture femoral shaft fracture detection method based on non-local separation attention mechanism |
| CN113628129A (en)* | 2021-07-19 | 2021-11-09 | 武汉大学 | Method for removing shadow of single image by edge attention based on semi-supervised learning |
| CN113807356A (en)* | 2021-07-29 | 2021-12-17 | 北京工商大学 | An end-to-end low-visibility image semantic segmentation method |
- 2021
- 2021-12-28CNCN202111628161.1Apatent/CN114445436B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080253678A1 (en)* | 2007-04-10 | 2008-10-16 | Arcsoft, Inc. | Denoise method on image pyramid |
| CN112329610A (en)* | 2020-11-03 | 2021-02-05 | 中科九度(北京)空间信息技术有限责任公司 | High-voltage line detection method based on edge attention mechanism fusion network |
| CN113077420A (en)* | 2021-03-19 | 2021-07-06 | 江南大学 | Fish fiber evaluation method and system based on convolutional neural network |
| CN113129278A (en)* | 2021-04-06 | 2021-07-16 | 华东师范大学 | X-Ray picture femoral shaft fracture detection method based on non-local separation attention mechanism |
| CN113034408A (en)* | 2021-04-30 | 2021-06-25 | 广东工业大学 | Infrared thermal imaging deep learning image denoising method and device |
| CN113628129A (en)* | 2021-07-19 | 2021-11-09 | 武汉大学 | Method for removing shadow of single image by edge attention based on semi-supervised learning |
| CN113807356A (en)* | 2021-07-29 | 2021-12-17 | 北京工商大学 | An end-to-end low-visibility image semantic segmentation method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114445436B (en) | 2025-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Zhong et al. | Deep attentional guided image filtering | |
| CN114529459A (en) | Method, system and medium for enhancing image edge | |
| CN110263809B (en) | Pooling feature map processing method, target detection method, system, device and medium | |
| WO2022233252A1 (en) | Image processing method and apparatus, and computer device and storage medium | |
| CN112183517B (en) | Card edge detection method, device and storage medium | |
| CN110570381B (en) | Semi-decoupling image decomposition dark light image enhancement method based on Gaussian total variation | |
| CN110570379B (en) | Non-local mean value CT image noise reduction method based on structure tensor | |
| CN111626912A (en) | Watermark removing method and device | |
| CN110189260A (en) | An image denoising method based on multi-scale parallel gated neural network | |
| CN114943649B (en) | Image deblurring method, device and computer readable storage medium | |
| CN101739670B (en) | Non-local mean space domain time varying image filtering method | |
| CN110969046A (en) | Face recognition method, device and computer-readable storage medium | |
| CN117994147A (en) | Low-illumination image contrast enhancement method based on deep neural network | |
| CN111709879B (en) | Image processing method, image processing device and terminal equipment | |
| CN105654431B (en) | It is a kind of to there are the image deblurring methods of circumstance of occlusion | |
| CN106023097A (en) | Iterative-method-based flow field image preprocessing algorithm | |
| CN112967198B (en) | Image processing method and device | |
| CN112819701B (en) | Image denoising method and system and electronic equipment | |
| CN114445436A (en) | A method, device and storage medium for target detection | |
| Fukushima et al. | Accelerating redundant dct filtering for deblurring and denoising | |
| CN118396858A (en) | An image restoration method based on dual-cue guided Transformer | |
| CN117475496A (en) | Face in-frame detection method and device in video, electronic equipment and storage medium | |
| CN113139920B (en) | Ancient book image restoration method, terminal equipment and storage medium | |
| CN110009591B (en) | An Adaptive Threshold Image Denoising Method Based on Fourth-Order Partial Differential Equation | |
| WO2022257433A1 (en) | Processing method and apparatus for feature map of image, storage medium, and terminal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |