CN114424240A - A target detection method and device, device, and storage medium - Google Patents
A target detection method and device, device, and storage mediumDownload PDFInfo
- Publication number
- CN114424240A CN114424240ACN201980100517.9ACN201980100517ACN114424240ACN 114424240 ACN114424240 ACN 114424240ACN 201980100517 ACN201980100517 ACN 201980100517ACN 114424240 ACN114424240 ACN 114424240A
- Authority
- CN
- China
- Prior art keywords
- candidate
- plane
- data
- determining
- sample
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
Abstract
Description
Translated fromChinesePCT国内申请,说明书已公开。PCT domestic application, the description has been published.
Claims (12)
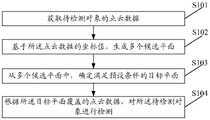
- An object detection method applied to an apparatus having a photographing function, the method comprising:acquiring point cloud data of an object to be detected;generating a plurality of candidate planes based on the coordinate values of the point cloud data;determining a target plane satisfying a preset condition from the plurality of candidate planes;and detecting the object to be detected according to the point cloud data covered by the target plane.
- The method of claim 1, wherein generating a plurality of candidate planes based on coordinate values of the point cloud data comprises:carrying out noise reduction processing on the point cloud data to obtain noise reduction data;sampling the noise reduction data according to a preset sampling condition to obtain sample data;and generating the candidate planes according to the coordinate values of the sample data.
- The method according to claim 2, wherein the sampling the noise reduction data according to a preset sampling condition to obtain sample data comprises:dividing the noise reduction data into a plurality of groups of sample data; and the data quantity in each group of sample data is more than or equal to a preset quantity.
- The method according to claim 2 or 3, wherein the generating the plurality of candidate planes according to the coordinate values of the sample data comprises:and generating corresponding candidate planes according to the coordinate values of each group of sample data in the multiple groups of sample data to obtain the multiple candidate planes.
- The method according to claim 2 or 3, wherein the generating the plurality of candidate planes according to the coordinate values of the sample data comprises:and generating a candidate plane meeting a quantity threshold according to the coordinate value of each group of sample data in the multiple groups of sample data.
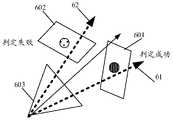
- The method according to claim 4, wherein the generating corresponding candidate planes according to the coordinate values of each group of sample data in the plurality of groups of sample data to obtain the plurality of candidate planes comprises:generating a corresponding sample plane according to the coordinate value of the ith group of sample data; wherein i is an integer greater than or equal to 1;determining a first coordinate value of an intersection between an optical axis of the acquisition device and the sample plane;and if the first coordinate value meets a preset feasible region condition, determining the sample plane as a candidate plane.
- The method according to claim 4, wherein the generating corresponding candidate planes according to the coordinate values of each group of sample data in the plurality of groups of sample data to obtain the plurality of candidate planes comprises:enclosing the point cloud data covered by the sample planes to obtain a plurality of enclosing boxes meeting a specific shape;determining a second coordinate value of an intersection point of the optical axis of the acquisition equipment and the central axis of each bounding box to obtain a second coordinate value set;selecting a candidate bounding box corresponding to a second coordinate value meeting the preset feasible region condition from the second coordinate value set;and if the attribute information of the candidate bounding box meets the corresponding preset condition, determining the sample plane corresponding to the candidate bounding box as a candidate plane.
- The method according to claim 7, wherein the determining that the sample plane corresponding to the candidate bounding box is a candidate plane if the attribute information of the candidate bounding box satisfies the corresponding preset condition comprises:and if the size of the candidate bounding box meets the size threshold, and/or the coordinate of the center point of the candidate bounding box is within a preset measurement range, and/or the second coordinate value is within the preset measurement range, determining the sample plane corresponding to the candidate bounding box as a candidate plane.
- The method according to claim 1, wherein the determining, from the plurality of candidate planes, a target plane satisfying a preset condition comprises:determining the number of points contained in the preset range of each candidate plane to obtain a plurality of point values;and determining the candidate plane corresponding to the maximum point number value as a target plane.
- An object detection apparatus, characterized in that the apparatus comprises: the device comprises a first acquisition module, a first generation module, a first determination module and a first detection module, wherein:the first acquisition module is used for acquiring point cloud data of an object to be detected;the first generation module is used for generating a plurality of candidate planes based on the coordinate values of the point cloud data;the first determining module is used for determining a target plane meeting a preset condition from the plurality of candidate planes;the first detection module is used for detecting the object to be detected according to the point cloud data covered by the target plane.
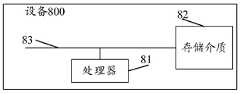
- An object detection apparatus comprising a memory and a processor, the memory storing a computer program operable on the processor, wherein the processor implements the steps of the object detection method of any one of claims 1 to 9 when executing the program.
- A computer-readable storage medium, on which a computer program is stored which, when being executed by a processor, carries out the steps of the method of any one of claims 1 to 9.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2019/117639WO2021092771A1 (en) | 2019-11-12 | 2019-11-12 | Target detection method and apparatus, and device and storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114424240Atrue CN114424240A (en) | 2022-04-29 |
| CN114424240B CN114424240B (en) | 2024-08-27 |
Family
ID=75911315
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980100517.9AActiveCN114424240B (en) | 2019-11-12 | 2019-11-12 | Target detection method and device, equipment and storage medium |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN114424240B (en) |
| WO (1) | WO2021092771A1 (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113724336B (en)* | 2021-08-09 | 2024-12-06 | 浙江大华技术股份有限公司 | Camera deployment method, camera deployment system, and computer-readable storage medium |
| CN113989388A (en)* | 2021-11-03 | 2022-01-28 | 北京有竹居网络技术有限公司 | A calibration method, device, electronic device and medium |
| CN114310875B (en)* | 2021-12-20 | 2023-12-05 | 珠海格力智能装备有限公司 | Crankshaft positioning identification method, device, storage medium and equipment |
| CN114581414B (en)* | 2022-03-07 | 2025-06-13 | 北京百度网讯科技有限公司 | Bounding box performance evaluation method, device, electronic device and storage medium |
| CN115937069B (en)* | 2022-03-24 | 2023-09-19 | 北京小米移动软件有限公司 | Parts testing methods, devices, electronic equipment and storage media |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104335067A (en)* | 2012-03-29 | 2015-02-04 | 商业创新和技能部国务大臣 | Coordinate measurement system and method |
| US20180047208A1 (en)* | 2016-08-15 | 2018-02-15 | Aquifi, Inc. | System and method for three-dimensional scanning and for capturing a bidirectional reflectance distribution function |
| CN108257213A (en)* | 2018-01-17 | 2018-07-06 | 视缘(上海)智能科技有限公司 | A kind of polygon curve reestablishing method of cloud lightweight |
| CN108288277A (en)* | 2018-01-17 | 2018-07-17 | 视缘(上海)智能科技有限公司 | A kind of method for reconstructing three-dimensional scene based on RAP |
| CN109196557A (en)* | 2016-06-08 | 2019-01-11 | 索尼公司 | Image processing apparatus, image processing method and vehicle |
| CN109693387A (en)* | 2017-10-24 | 2019-04-30 | 三纬国际立体列印科技股份有限公司 | 3D modeling method based on point cloud data |
| CN109814564A (en)* | 2019-01-29 | 2019-05-28 | 炬星科技(深圳)有限公司 | Detection, barrier-avoiding method, electronic equipment and the storage medium of target object |
| CN110285754A (en)* | 2019-07-02 | 2019-09-27 | 深圳市镭神智能系统有限公司 | Workpiece localization method, device, system and storage medium based on laser scanning |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103247041B (en)* | 2013-05-16 | 2016-02-10 | 北京建筑工程学院 | A kind of dividing method of the cloud data of the many geometric properties based on local sampling |
| KR101547940B1 (en)* | 2014-12-17 | 2015-08-28 | 가톨릭관동대학교산학협력단 | An error correction system for data of terrestrial LiDAR on the same plane and the method thereof |
| US9868212B1 (en)* | 2016-02-18 | 2018-01-16 | X Development Llc | Methods and apparatus for determining the pose of an object based on point cloud data |
| CN105976375A (en)* | 2016-05-06 | 2016-09-28 | 苏州中德睿博智能科技有限公司 | RGB-D-type sensor based tray identifying and positioning method |
| CN107292921B (en)* | 2017-06-19 | 2020-02-04 | 电子科技大学 | Rapid three-dimensional reconstruction method based on kinect camera |
| CN109087345A (en)* | 2018-09-06 | 2018-12-25 | 上海仙知机器人科技有限公司 | Pallet recognition methods and automated guided vehicle based on ToF imaging system |
- 2019
- 2019-11-12CNCN201980100517.9Apatent/CN114424240B/enactiveActive
- 2019-11-12WOPCT/CN2019/117639patent/WO2021092771A1/ennot_activeCeased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104335067A (en)* | 2012-03-29 | 2015-02-04 | 商业创新和技能部国务大臣 | Coordinate measurement system and method |
| CN109196557A (en)* | 2016-06-08 | 2019-01-11 | 索尼公司 | Image processing apparatus, image processing method and vehicle |
| US20180047208A1 (en)* | 2016-08-15 | 2018-02-15 | Aquifi, Inc. | System and method for three-dimensional scanning and for capturing a bidirectional reflectance distribution function |
| CN109693387A (en)* | 2017-10-24 | 2019-04-30 | 三纬国际立体列印科技股份有限公司 | 3D modeling method based on point cloud data |
| CN108257213A (en)* | 2018-01-17 | 2018-07-06 | 视缘(上海)智能科技有限公司 | A kind of polygon curve reestablishing method of cloud lightweight |
| CN108288277A (en)* | 2018-01-17 | 2018-07-17 | 视缘(上海)智能科技有限公司 | A kind of method for reconstructing three-dimensional scene based on RAP |
| CN109814564A (en)* | 2019-01-29 | 2019-05-28 | 炬星科技(深圳)有限公司 | Detection, barrier-avoiding method, electronic equipment and the storage medium of target object |
| CN110285754A (en)* | 2019-07-02 | 2019-09-27 | 深圳市镭神智能系统有限公司 | Workpiece localization method, device, system and storage medium based on laser scanning |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114424240B (en) | 2024-08-27 |
| WO2021092771A1 (en) | 2021-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114424240A (en) | A target detection method and device, device, and storage medium | |
| CN107728615B (en) | self-adaptive region division method and system | |
| CN110632608B (en) | Target detection method and device based on laser point cloud | |
| CN110471409B (en) | Robot inspection method and device, computer readable storage medium and robot | |
| CN106886980B (en) | Point cloud density enhancement method based on three-dimensional laser radar target identification | |
| TWI628620B (en) | System and method for cutting point clouds | |
| US20150109290A1 (en) | Device and method for removing noise points in point clouds | |
| JP6202147B2 (en) | Curve detection method and curve detection apparatus | |
| CN107133966B (en) | A 3D Sonar Image Background Segmentation Method Based on Sampling Consistency Algorithm | |
| CN103970879B (en) | Method and system for regulating storage positions of data blocks | |
| CN113168729B (en) | A 3D shape matching method and device based on a local reference coordinate system | |
| CN112926465B (en) | Coastline property identification method and device based on point cloud type | |
| CN111812670B (en) | A single-photon lidar spatial transformation noise judgment, filtering method and device | |
| JP5960642B2 (en) | 3D information acquisition method and 3D information acquisition apparatus | |
| CN114981845A (en) | Image scanning method and device, equipment and storage medium | |
| CN115752739A (en) | Temperature compensation method and device and electronic equipment | |
| CN116994007B (en) | Commodity texture detection processing method and device | |
| CN113033270B (en) | 3D object partial surface description method, device and storage medium using auxiliary axes | |
| CN114863195B (en) | Point cloud data processing method and system, storage medium and electronic equipment | |
| KR20240013085A (en) | Methods and apparatus for processing image data for machine vision | |
| JP2002090345A (en) | Eddy current test signal discriminating method and device using it | |
| CN108872999B (en) | Object identification method, device, identification equipment and storage medium | |
| CN111461136B (en) | Data processing method, device, system and computer readable storage medium | |
| CN110309139B (en) | High-dimensional neighbor pair searching method and system | |
| JP2017102869A (en) | Importance calculation device, method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |