CN114398049A - An adaptive dynamic update method for digital twin model of discrete manufacturing workshop - Google Patents
An adaptive dynamic update method for digital twin model of discrete manufacturing workshopDownload PDFInfo
- Publication number
- CN114398049A CN114398049ACN202111438858.2ACN202111438858ACN114398049ACN 114398049 ACN114398049 ACN 114398049ACN 202111438858 ACN202111438858 ACN 202111438858ACN 114398049 ACN114398049 ACN 114398049A
- Authority
- CN
- China
- Prior art keywords
- model
- data
- digital twin
- virtual
- production line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F8/00—Arrangements for software engineering
- G06F8/60—Software deployment
- G06F8/65—Updates
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Security & Cryptography (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Factory Administration (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及车间数字化技术领域,主要涉及一种离散制造车间数字孪生模型自适应动态更新方法。The invention relates to the technical field of workshop digitization, and mainly relates to an adaptive and dynamic updating method of a digital twin model of a discrete manufacturing workshop.
背景技术Background technique
随着“工业4.0”和智能制造的兴起,物联网、大数据和人工智能等新的技术手段和工具不断涌现,这些新技术和工具助力传统制造业的转型升级,以此来推动制造业的高质量发展。智能化技术的应用对传统离散机械产品生产车间的改造升级也提出了新的要求。数字孪生是近几年智能制造的新兴技术,也是智能制造落地应用的手段之一。数字孪生制造车间作为一种车间运行新模式,已经在制造业中兴起并逐步探索应用,准确的孪生模型修正是完成车间数字孪生建设的重要保证。With the rise of "Industry 4.0" and intelligent manufacturing, new technical means and tools such as the Internet of Things, big data and artificial intelligence are emerging. high-quality development. The application of intelligent technology also puts forward new requirements for the transformation and upgrading of traditional discrete mechanical product production workshops. Digital twin is an emerging technology of intelligent manufacturing in recent years, and it is also one of the means for the application of intelligent manufacturing. As a new mode of workshop operation, the digital twin manufacturing workshop has emerged in the manufacturing industry and gradually explored its application. Accurate twin model revision is an important guarantee for the completion of the digital twin construction of the workshop.
当前对于车间数字孪生的研究仍处于初步探索阶段。数字孪生制造车间作为物理世界与信息世界交互与共融,以及制造活动的执行基础,需要在车间数据的驱动下,达到车间生产和管控最优。然而,在数字孪生应用中,孪生模型随着时间的推移会出现精度下降的现象,导致模型出现不准确的问题,影响车间管控的效率和精确性。实际上,如何对数字孪生制造车间的模型进行动态自适应更新,即在孪生模型精度误差显著增加时,进行模型修正,纠正模型偏差具有挑战性。保证孪生模型的准确性将直接影响数字孪生建设精度,进而影响车间数字孪生建设的效果。The current research on workshop digital twin is still in the preliminary exploration stage. As the basis for the interaction and integration of the physical world and the information world, as well as the execution of manufacturing activities, the digital twin manufacturing workshop needs to be driven by workshop data to achieve optimal workshop production and control. However, in digital twin applications, the accuracy of the twin model will decrease over time, resulting in inaccurate models and affecting the efficiency and accuracy of workshop control. In fact, how to dynamically and adaptively update the model of the digital twin manufacturing workshop, that is, when the accuracy error of the twin model increases significantly, it is challenging to perform model correction and correct model deviation. Ensuring the accuracy of the twin model will directly affect the accuracy of digital twin construction, which in turn affects the effect of workshop digital twin construction.
数字孪生作为实现物理与信息融合的一种有效手段,将其应用到离散制造车间中,以孪生数据为驱动,融合物理模型与虚拟模型,完成“虚实映射,以虚控实”的迭代优化。数字孪生技术是指利用数字技术对物理实体对象的特征、行为、形成过程和性能进行描述和建模,在虚拟空间中存在一个与物理空间中的物理实体对象完全一样的数字镜像,使得产品和生产系统的数字空间模型和物理空间模型处于实时交互中,使二者能够及时地掌握彼此的动态变化并实时地做出响应。数字孪生模型(以下简称“孪生模型”)是指与物理实体模型在几何参数和性能参数一模一样的数字化模型;在产品运行阶段,孪生模型可与其实际物理实体形成实时动态的联动。可试验孪生模型是指无需驱动物理实体就可以通过孪生模型进行反复测试与实验以验证物理实体的功能与性能。为了达到能在运行阶段与物理实体的功能和性能一致,在设计阶段必须能完成孪生模型的可试验性,也就是在生产前就能验证物理实体的几何尺寸、功能与性能。然而,在数字孪生制造车间建设过程中,随着时间的推移孪生模型的精度会出现降低的现象,影响车间管控的效果,如果不对孪生模型进行及时的修正,可能会出现错误的方案指令,显著降低车间运行效率。经过对目前已有的相关专利和论文进行研究发现,目前孪生模型虽然在可视化、控制逻辑一致和数据实时交互方面有一些进展,但在离散制造车间的数字孪生领域,往往还是停留在孪生模型构建阶段,且缺乏考虑应用中孪生模型的适应性问题,导致物理车间数字孪生建设中孪生模型应用效果差的问题。As an effective means to realize the fusion of physics and information, digital twins are applied to discrete manufacturing workshops. Driven by twin data, physical models and virtual models are integrated to complete the iterative optimization of "virtual and real mapping, and virtual control of real". Digital twin technology refers to the use of digital technology to describe and model the characteristics, behavior, formation process and performance of physical objects. The digital space model and the physical space model of the production system are in real-time interaction, so that the two can grasp each other's dynamic changes in time and respond in real time. A digital twin model (hereinafter referred to as "twin model") refers to a digital model with the same geometric parameters and performance parameters as the physical entity model; in the product operation stage, the twin model can form a real-time dynamic linkage with its actual physical entity. A testable twin model means that repeated tests and experiments can be performed through the twin model without driving the physical entity to verify the function and performance of the physical entity. In order to achieve the same function and performance as the physical entity in the operation stage, the testability of the twin model must be completed in the design stage, that is, the geometric size, function and performance of the physical entity can be verified before production. However, during the construction of the digital twin manufacturing workshop, the accuracy of the twin model will decrease over time, which will affect the effect of workshop management and control. Reduce workshop operating efficiency. After researching the existing related patents and papers, it is found that although the current twin model has some progress in visualization, consistent control logic and real-time data interaction, in the field of digital twins in discrete manufacturing workshops, it often stays in the construction of twin models. stage, and the lack of consideration of the adaptability of the twin model in the application leads to the problem of poor application effect of the twin model in the construction of the digital twin of the physical workshop.
综上所述,提出一种面向数字孪生制造车间的模型动态自适应修正方法,对于保证孪生模型应用中的精度,提高车间数字孪生建设效果,提升制造水平,重塑竞争优势具有重要意义。To sum up, a dynamic self-adaptive model correction method for digital twin manufacturing workshops is proposed, which is of great significance for ensuring the accuracy of twin model applications, improving the effect of digital twin construction in workshops, improving manufacturing levels, and reshaping competitive advantages.
发明内容SUMMARY OF THE INVENTION
发明目的:针对上述背景技术中存在的问题,本发明提供了一种离散制造车间数字孪生模型自适应动态更新方法,围绕孪生模型精度误差模型构建,孪生模型更新机制条件建立,再到孪生模型修正的路线,对孪生模型进行动态自适应修正。在孪生模型精度误差构建中,首先需要确定优先进行修正的孪生模型的性能指标,将平方损失函数作为性能指标选择的判断依据,完成性能指标的选取。其次,基于Mann-Kendall的偏差趋势分析方法对性能指标的精度进行显著性检验,判断性能指标是否需要进行修正。最后,将车间生产数据进行切片后,作为修正依据,以DNN和LSTM为基学习器,进行模型训练,采用Adaboost集成学习方法,形成强学习器,用强学习器替代不准确的孪生模型中的性能模型即可,完成孪生模型的自适应动态修正,解决现有离散制造车间数字孪生技术应用中存在的孪生模型无法动态修正的技术难题。Purpose of the invention: In view of the problems existing in the above background technology, the present invention provides a method for self-adaptive dynamic updating of a digital twin model of a discrete manufacturing workshop, which is constructed around the accuracy error model of the twin model, the condition of the twin model update mechanism is established, and then the twin model is corrected. The route of dynamic adaptive correction to the twin model. In the construction of the accuracy error of the twin model, it is first necessary to determine the performance index of the twin model to be corrected first, and use the squared loss function as the judgment basis for the selection of the performance index to complete the selection of the performance index. Secondly, based on Mann-Kendall's deviation trend analysis method, the precision of the performance index is tested for significance, and it is judged whether the performance index needs to be corrected. Finally, after slicing the workshop production data, as the basis for correction, DNN and LSTM are used as the base learners for model training, and the Adaboost integrated learning method is used to form a strong learner, and the strong learner is used to replace the inaccurate twin model. The performance model is enough to complete the adaptive dynamic correction of the twin model, and solve the technical problem that the twin model cannot be dynamically corrected in the application of the existing discrete manufacturing workshop digital twin technology.
技术方案:为实现上述目的,本发明采用的技术方案为:Technical scheme: In order to realize the above-mentioned purpose, the technical scheme adopted in the present invention is:
一种离散制造车间数字孪生模型自适应动态更新方法,包括以下步骤:A method for self-adaptive dynamic updating of a digital twin model of a discrete manufacturing workshop, comprising the following steps:
步骤S1、通过数字孪生制造车间部署的物联感知设备按时序采集连续多个生产过程的生产数据,选取特征数据集;所述特征数据集包括订单任务数据、当前时刻已完成任务数据、实时生产状态数据和预测时间;同时对虚拟车间进行数据采集,获取特征数据集;Step S1, collect production data of multiple consecutive production processes in time sequence through the IoT sensing device deployed in the digital twin manufacturing workshop, and select a feature data set; the feature data set includes order task data, completed task data at the current moment, real-time production Status data and forecast time; at the same time, data collection is performed on the virtual workshop to obtain feature data sets;
步骤S2、将平方损失函数作为性能目标响应误差,并采用最大最小归一方法对目标响应误差进行归一化处理,确认需要优先修正的性能目标;Step S2, taking the squared loss function as the performance target response error, and using the maximum and minimum normalization method to normalize the target response error to confirm the performance target that needs to be corrected first;
步骤S3、采用基于Mann-Kendall的偏差趋势分析方法对性能指标的精度进行显著性检验;当精度误差超越预设阈值时,所述数字孪生模型进行自适应更新;Step S3, using the Mann-Kendall-based deviation trend analysis method to perform a significance test on the accuracy of the performance index; when the accuracy error exceeds a preset threshold, the digital twin model is adaptively updated;
步骤S4、基于步骤S3的数字孪生模型更新机制,采用集成学习方法,选择DNN和LSTM作为基学习器,对基学习器进行差额对比训练,直到形成强学习器,最后进行数字孪生模型的更新。Step S4, based on the update mechanism of the digital twin model in step S3, adopting an integrated learning method, selecting DNN and LSTM as the base learner, and performing differential training on the base learner until a strong learner is formed, and finally the digital twin model is updated.
进一步地,步骤S2中包括响应误差的计算和待修正性能目标的选择两个过程;具体地,Further, step S2 includes two processes: the calculation of the response error and the selection of the performance target to be corrected; specifically,
步骤S2.1、构建性能目标响应误差函数;用平方损失函数

其中,
步骤S2.2、选择待修正的性能目标;采用最大最小归一化方法对目标响应误差


其中,
△ERij=|ERi-ERj|△ERij = |ERi -ERj |
i和j分别表示目标响应对中包含的不同目标响应;进一步明确各个目标响应对误差差值所占比例,即目标响应对的分项系数wij,计算公式如下:i and j respectively represent different target responses included in the target response pair; further clarify the proportion of the error difference of each target response pair, that is, the sub-item coefficient wij of the target response pair, the calculation formula is as follows:

n表示目标响应的总数;wij的值越大,则表示第i和j个目标的响应误差越大,需要修正的优先级越高。n represents the total number of target responses; the larger the value of wij , the greater the response error of the i-th and j-th targets, and the higher the priority to be corrected.
进一步地,所述步骤S3中基于Mann-Kendall的偏差趋势分析方法具体包括:Further, the deviation trend analysis method based on Mann-Kendall in the step S3 specifically includes:
步骤S3.1、获得数字孪生模型的测试精度变化;计算方式包括:Step S3.1, obtain the test accuracy change of the digital twin model; the calculation method includes:

其中,

第i个指标的一个完整的数字孪生模型测试精度变化表示为:A complete digital twin model test accuracy change for the i-th metric is expressed as:

步骤S3.2、采用Mann-Kendall趋势检验方法检验数字孪生模型测试精度△TAi的趋势变化情况;当数字孪生模型测试精度呈现下降趋势时,触发数字孪生模型更新机制;具体地,Mann-Kendall趋势检验的公式为:Step S3.2, using the Mann-Kendall trend test method to check the trend change of the test accuracy ΔTAi of the digital twin model; when the test accuracy of the digital twin model shows a downward trend, the digital twin model update mechanism is triggered; specifically, the Mann-Kendall model The formula for the trend test is:


其中T为数字孪生模型测试精度序列中数值的个数,当Si>0时,表示精度变化向上变化;当Si<0时,表示精度变化向下变化;当T>10时,使用Zi统计量,并计算Si的方差,计算公式如下:where T is the number of values in the test accuracy sequence of the digital twin model. When Si > 0, it means that the accuracy changes upward; when Si <0, it means that the accuracy changes downward; when T > 10, use Zi statistic, and calculate the variance of Si, the formula is as follows:


其中Var(Si)表示Si的方差,G表示结组数,tj*表示第j*结组中数值的个数;Zi表示检验统计量;当Z<0时,表示△TAi随着时间在递减变化,孪生模型精度呈现上升趋势;当Z>0时,则说明△TAi随着时间在递增变化,孪生模型精度呈现下降趋势,此时触发数字孪生模型更新机制。where Var(Si )represents the variance of Si, G represents the number of knot groups, tj* represents the number of values in the j*th knot group; Zi represents the test statistic; when Z<0, it represents △TAi As time decreases, the accuracy of the twin model shows an upward trend; when Z>0, it means that △TAi increases with time, and the accuracy of the twin model shows a downward trend, and the digital twin model update mechanism is triggered at this time.
进一步地,步骤S4中数字孪生模型进行自适应更新的具体步骤包括:Further, the specific steps of adaptively updating the digital twin model in step S4 include:
步骤S4.1、Adaboost权重函数更新;采用时间加权方法对权重函数进行更新,具体如下:Step S4.1, update the Adaboost weight function; use the time weighting method to update the weight function, as follows:
ωt=exp(-ηt)(t=1,2,…,T;η∈[0,0.99])ωt =exp(-ηt)(t=1,2,...,T; η∈[0,0.99])
其中t表示数据获取的时刻,即t时刻获取的数据批号;当数据批次依次增加时,t增大,数据越新,重要性越强;Among them, t represents the time of data acquisition, that is, the batch number of data acquired at time t; when the data batches increase sequentially, t increases, and the newer the data, the stronger the importance;
步骤S4.2、更新样本的迭代加权机制;Adaboost-DNN-LSTM算法对基学习器的训练迭代过程中的样本权重更新机制具体如下:Step S4.2, update the iterative weighting mechanism of the sample; the update mechanism of the sample weight in the iterative process of training the base learner by the Adaboost-DNN-LSTM algorithm is as follows:



其中,U表示Adaboost-DNN-LSTM的总迭代次数,m*表示总样本数;

步骤S4.3、确定基学习器权重αu;用αu表示第u个基学习器的投票权重,由DNN、LSTM基学习器在数据集上的精度误差εu所决定,采用以下计算公式:Step S4.3, determine the weight αu of the base learner; use αu to represent the voting weight of the u-th base learner, which is determined by the accuracy error εu of the DNN and LSTM base learners on the data set, using the following calculation formula :


其中




步骤S4.4、基学习器集成;将训练好的基学习器按照投票权重进行集成,获得最终的强学习器Adaboost-DNN-LSTM,集成公式如下:Step S4.4, base learner integration; integrate the trained base learners according to the voting weight to obtain the final strong learner Adaboost-DNN-LSTM. The integration formula is as follows:

最终用强学习器更新原有的数字孪生模型中的性能模型,完成动态自适应修正。Finally, a strong learner is used to update the performance model in the original digital twin model to complete the dynamic adaptive correction.
进一步地,步骤S1中所述数字孪生制造车间包括虚拟产线、物理产线、仿真模型、逻辑模型和数据模型;所述虚拟产线通过仿真模型、逻辑模型、数据模型与物理产线相连接,仿真模型与逻辑模型连接,逻辑模型连接数据模型;所述虚拟产线是物理产线在数字空间里的数字映射;所述仿真模型是支持虚拟产线以实际产线状态运行的人工智能算法;所述逻辑模型是物理产线实际进行生产的运行逻辑。Further, the digital twin manufacturing workshop described in step S1 includes a virtual production line, a physical production line, a simulation model, a logic model, and a data model; the virtual production line is connected with the physical production line through the simulation model, the logic model, and the data model. , the simulation model is connected with the logic model, and the logic model is connected with the data model; the virtual production line is the digital mapping of the physical production line in the digital space; the simulation model is an artificial intelligence algorithm that supports the virtual production line to run in the actual production line state ; The logic model is the running logic of the actual production of the physical production line.
进一步地,所述虚拟产线包括虚拟生产设备、虚拟输送设备、虚拟监控设备和其他虚拟设备;虚拟生产设备、虚拟输送设备、虚拟监控设备和其他虚拟设备均分别逻辑模型和数据模型相连接;所述物理产线包括生产设备、输送设备、监控设备和其他设备;生产设备、输送设备、监控设备和其他设备均分别与逻辑模型和数据模型相连接;所述虚拟产线各设备分别对应物理产线上的同名设备;所述传感器设置在虚拟产线上,分别与生产设备、输送设备、监控设备和其他设备相连接。Further, the virtual production line includes virtual production equipment, virtual conveying equipment, virtual monitoring equipment and other virtual equipment; the virtual production equipment, virtual conveying equipment, virtual monitoring equipment and other virtual equipment are respectively connected with logical models and data models; The physical production line includes production equipment, conveying equipment, monitoring equipment and other equipment; the production equipment, conveying equipment, monitoring equipment and other equipment are connected to the logical model and the data model respectively; each equipment of the virtual production line corresponds to the physical The device with the same name on the production line; the sensor is set on the virtual production line and is connected with production equipment, conveying equipment, monitoring equipment and other equipment respectively.
进一步地,在虚拟产线的运行过程中,虚拟传感器实时采集虚拟生产设备的数据,并将数据传输至产线数据模型服务平台,传感器从产线数据模型服务平台中读取数据并作用于生产设备;生产设备进行生产动作,得到物理产线的数据,并将物理产线的数据传输至产线数据模型服务平台与虚拟产线的数据进行对比,如果生产设备和虚拟生产设备的数据存在差异,则调整虚拟生产设备的路径和位置,使虚拟产线和物理产线的运行结果一致。Further, during the operation of the virtual production line, the virtual sensor collects the data of the virtual production equipment in real time, and transmits the data to the production line data model service platform. The sensor reads the data from the production line data model service platform and acts on the production line. Equipment; the production equipment performs production actions, obtains the data of the physical production line, and transmits the data of the physical production line to the production line data model service platform to compare with the data of the virtual production line, if there is a difference between the data of the production equipment and the virtual production equipment , then adjust the path and position of the virtual production equipment, so that the running results of the virtual production line and the physical production line are consistent.
有益效果:Beneficial effects:
本发明提供的离散制造车间数字孪生模型自适应动态更新方法充分利用海量制造数据中蕴含的知识信息,将Adaboost、DNN和LSTM进行有效集成,理论方法简单,易实现,极大提升了计算效率,满足自适应更新要求。为离散制造系统数字孪生的精确应用,包括:性能分析、在线决策与优化提供了模型更新方法,对车间生产管控智能化水平的提升具有重要的价值。本发明可以用于指导数字孪生模型构建过程,解决孪生模型随时间变化而出现性能衰减的问题,能够有效提高孪生模型构建精度。The self-adaptive dynamic update method of the digital twin model of the discrete manufacturing workshop provided by the invention makes full use of the knowledge information contained in the massive manufacturing data, and effectively integrates Adaboost, DNN and LSTM. The theoretical method is simple and easy to implement, and the calculation efficiency is greatly improved. Meet adaptive update requirements. It provides a model update method for the precise application of the digital twin of discrete manufacturing systems, including: performance analysis, online decision-making and optimization, and is of great value to the improvement of the intelligent level of workshop production management and control. The invention can be used to guide the construction process of the digital twin model, solve the problem of performance degradation of the twin model over time, and can effectively improve the construction accuracy of the twin model.
附图说明Description of drawings
图1是本发明提供的离散制造车间数字孪生模型自适应动态更新方法原理图;Fig. 1 is the principle diagram of the self-adaptive dynamic update method of discrete manufacturing workshop digital twin model provided by the present invention;
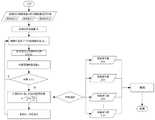
图2是本发明提供的数字孪生模型自适应动态更新方法流程图;Fig. 2 is the digital twin model adaptive dynamic update method flow chart provided by the present invention;
图3是本发明实施例中提供的集成Adaboost-DNN-LSTM算法流程图。FIG. 3 is a flowchart of an integrated Adaboost-DNN-LSTM algorithm provided in an embodiment of the present invention.
具体实施方式Detailed ways
下面结合附图对本发明作更进一步的说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The present invention will be further described below in conjunction with the accompanying drawings. Obviously, the described embodiments are some, but not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
本发明提供了一种离散制造车间数字孪生模型自适应动态更新方法,具体包括以下步骤:The invention provides a method for self-adaptive dynamic updating of a digital twin model of a discrete manufacturing workshop, which specifically includes the following steps:
步骤S1、过数字孪生制造车间部署的物联感知设备按时序采集连续多个生产过程的生产数据,选取特征数据集;所述特征数据集包括订单任务数据、当前时刻已完成任务数据、实时生产状态数据和预测时间;同样对虚拟车间也进行数据采集,获取特征数据集。其中两个特征数据集互相独立采集,且具有相同的类别。In step S1, the IoT sensing device deployed in the digital twin manufacturing workshop collects production data of multiple consecutive production processes in time sequence, and selects a feature data set; the feature data set includes order task data, completed task data at the current moment, real-time production Status data and forecast time; also collect data on virtual workshops to obtain feature data sets. Two of the feature datasets are collected independently of each other and have the same category.
数字孪生车间的数据来源多样,不同来源的数据在编码方式、数据格式、应用特征等方面不尽相同,不同制造要素数据在形式、语义、标识上也存在显著差异。数字孪生制造车间包括虚拟产线、物理产线、仿真模型、逻辑模型和数据模型;所述虚拟产线通过仿真模型、逻辑模型、数据模型与物理产线相连接,仿真模型与逻辑模型连接,逻辑模型连接数据模型相;所述虚拟产线是物理产线在数字空间里的数字映射;所述仿真模型是支持虚拟产线以实际产线状态运行的人工智能算法;所述逻辑模型是物理产线实际进行生产的运行逻辑。The data sources of the digital twin workshop are diverse, and the data from different sources are different in terms of coding methods, data formats, and application characteristics. There are also significant differences in the form, semantics, and identification of different manufacturing element data. The digital twin manufacturing workshop includes a virtual production line, a physical production line, a simulation model, a logic model and a data model; the virtual production line is connected with the physical production line through the simulation model, logic model and data model, and the simulation model is connected with the logic model, The logical model connects the data model phases; the virtual production line is the digital mapping of the physical production line in the digital space; the simulation model is an artificial intelligence algorithm that supports the virtual production line to run in the actual production line state; the logical model is the physical production line. The operation logic of the actual production line in the production line.
虚拟产线包括虚拟生产设备、虚拟输送设备、虚拟监控设备和其他虚拟设备;虚拟生产设备、虚拟输送设备、虚拟监控设备和其他虚拟设备均分别逻辑模型和数据模型相连接;所述物理产线包括生产设备、输送设备、监控设备和其他设备;生产设备、输送设备、监控设备和其他设备均分别与逻辑模型和数据模型相连接;所述虚拟产线各设备分别对应物理产线上的同名设备;所述传感器设置在虚拟产线上,分别与生产设备、输送设备、监控设备和其他设备相连接。The virtual production line includes virtual production equipment, virtual conveying equipment, virtual monitoring equipment and other virtual equipment; virtual production equipment, virtual conveying equipment, virtual monitoring equipment and other virtual equipment are connected with logical models and data models respectively; the physical production line Including production equipment, conveying equipment, monitoring equipment and other equipment; production equipment, conveying equipment, monitoring equipment and other equipment are connected with the logic model and data model respectively; each equipment of the virtual production line corresponds to the same name on the physical production line equipment; the sensors are arranged on the virtual production line and are respectively connected with production equipment, conveying equipment, monitoring equipment and other equipment.
在虚拟产线的运行过程中,虚拟传感器实时采集虚拟生产设备的数据,并将数据传输至产线数据模型服务平台,传感器从产线数据模型服务平台中读取数据并作用于生产设备;生产设备进行生产动作,得到物理产线的数据,并将物理产线的数据传输至产线数据模型服务平台与虚拟产线的数据进行对比,如果生产设备和虚拟生产设备的数据存在差异,则调整虚拟生产设备的路径和位置,使虚拟产线和物理产线的运行结果一致,实现智能产线可试验数字孪生体的数据交互。During the operation of the virtual production line, the virtual sensor collects the data of the virtual production equipment in real time, and transmits the data to the production line data model service platform. The sensor reads the data from the production line data model service platform and acts on the production equipment; production The equipment performs production actions, obtains the data of the physical production line, and transmits the data of the physical production line to the production line data model service platform and compares it with the data of the virtual production line. If there is a difference between the data of the production equipment and the virtual production equipment, adjust The path and location of the virtual production equipment make the operation results of the virtual production line and the physical production line consistent, and realize the data exchange of the testable digital twin of the intelligent production line.
步骤S2、将平方损失函数作为性能目标响应误差,并采用最大最小归一方法对目标响应误差进行归一化处理,确认需要优先修正的性能目标;具体地,Step S2, taking the squared loss function as the performance target response error, and using the maximum and minimum normalization method to normalize the target response error to confirm the performance target that needs to be corrected first; specifically,
步骤S2.1、构建性能目标响应误差函数;用平方损失函数

其中,
步骤S2.2、选择待修正的性能目标;采用最大最小归一化方法对目标响应误差


其中,
△ERij=|ERi-ERj|△ERij = |ERi -ERj |
i和j分别表示目标响应对中包含的不同目标响应;进一步明确各个目标响应对误差差值所占比例,即目标响应对的分项系数wij,计算公式如下:i and j respectively represent different target responses included in the target response pair; further clarify the proportion of the error difference of each target response pair, that is, the sub-item coefficient wij of the target response pair, the calculation formula is as follows:

n表示目标响应的总数;wij的值越大,则表示第i和j个目标的响应误差越大,需要修正的优先级越高。n represents the total number of target responses; the larger the value of wij , the greater the response error of the i-th and j-th targets, and the higher the priority to be corrected.
步骤S3、采用基于Mann-Kendall的偏差趋势分析方法对性能指标的精度进行显著性检验;当精度误差超越预设阈值时,所述数字孪生模型进行自适应更新;具体地,Step S3, using the deviation trend analysis method based on Mann-Kendall to carry out a significance test on the accuracy of the performance index; when the accuracy error exceeds a preset threshold, the digital twin model is adaptively updated; specifically,
步骤S3.1、获得数字孪生模型的测试精度变化;计算方式包括:Step S3.1, obtain the test accuracy change of the digital twin model; the calculation method includes:

其中,

第i个指标的一个完整的数字孪生模型测试精度变化表示为:A complete digital twin model test accuracy change for the i-th metric is expressed as:

步骤S3.2、采用Mann-Kendall趋势检验方法检验数字孪生模型测试精度△TAi的趋势变化情况;当数字孪生模型测试精度呈现下降趋势时,触发数字孪生模型更新机制;具体地,Mann-Kendall趋势检验的公式为:Step S3.2, using the Mann-Kendall trend test method to check the trend change of the test accuracy ΔTAi of the digital twin model; when the test accuracy of the digital twin model shows a downward trend, the digital twin model update mechanism is triggered; specifically, the Mann-Kendall model The formula for the trend test is:


其中T为数字孪生模型测试精度序列中数值的个数,当Si>0时,表示精度变化向上变化;当Si<0时,表示精度变化向下变化;当T>10时,使用Zi统计量,并计算Si的方差,计算公式如下:where T is the number of values in the test accuracy sequence of the digital twin model. When Si > 0, it means that the accuracy changes upward; when Si <0, it means that the accuracy changes downward; when T > 10, use Zi statistic, and calculate the variance of Si, the formula is as follows:


其中Var(Si)表示Si的方差,G表示结组数,tj*表示第j*结组中数值的个数;Zi表示检验统计量;当Z<0时,表示△TAi随着时间在递减变化,孪生模型精度呈现上升趋势;当Z>0时,则说明△TAi随着时间在递增变化,孪生模型精度呈现下降趋势,此时触发数字孪生模型更新机制。where Var(Si )represents the variance of Si, G represents the number of knot groups, tj* represents the number of values in the j*th knot group; Zi represents the test statistic; when Z<0, it represents △TAi As time decreases, the accuracy of the twin model shows an upward trend; when Z>0, it means that △TAi increases with time, and the accuracy of the twin model shows a downward trend, and the digital twin model update mechanism is triggered at this time.
步骤S4、基于步骤S3的数字孪生模型更新机制,采用集成学习方法,选择DNN和LSTM作为基学习器,对基学习器进行差额对比训练,直到形成强学习器,最后进行数字孪生模型的更新。具体地,Step S4, based on the update mechanism of the digital twin model in step S3, adopting an integrated learning method, selecting DNN and LSTM as the base learner, and performing differential training on the base learner until a strong learner is formed, and finally the digital twin model is updated. specifically,
步骤S4.1、Adaboost权重函数更新;采用时间加权方法对权重函数进行更新,具体如下:Step S4.1, update the Adaboost weight function; use the time weighting method to update the weight function, as follows:
ωt=exp(-ηt)(t=1,2,…,T;η∈[0,0.99])ωt =exp(-ηt)(t=1,2,...,T; η∈[0,0.99])
其中t表示数据获取的时刻,即t时刻获取的数据批号;当数据批次依次增加时,t增大,数据越新,重要性越强;Among them, t represents the time of data acquisition, that is, the batch number of data acquired at time t; when the data batches increase sequentially, t increases, and the newer the data, the stronger the importance;
步骤S4.2、更新样本的迭代加权机制;Adaboost-DNN-LSTM算法对基学习器的训练迭代过程中的样本权重更新机制具体如下:Step S4.2, update the iterative weighting mechanism of the sample; the update mechanism of the sample weight in the iterative process of training the base learner by the Adaboost-DNN-LSTM algorithm is as follows:



其中,U表示Adaboost-DNN-LSTM的总迭代次数,m*表示总样本数;

步骤S4.3、确定基学习器权重αu;用αu表示第u个基学习器的投票权重,由DNN、LSTM基学习器在数据集上的精度误差εu所决定,采用以下计算公式:Step S4.3, determine the weight αu of the base learner; use αu to represent the voting weight of the u-th base learner, which is determined by the accuracy error εu of the DNN and LSTM base learners on the data set, using the following calculation formula :


其中




步骤S4.4、基学习器集成;将训练好的基学习器按照投票权重进行集成,获得最终的强学习器Adaboost-DNN-LSTM,集成公式如下:Step S4.4, base learner integration; integrate the trained base learners according to the voting weight to obtain the final strong learner Adaboost-DNN-LSTM. The integration formula is as follows:

最终用强学习器更新原有的数字孪生模型中的性能模型,完成动态自适应修正。Finally, a strong learner is used to update the performance model in the original digital twin model to complete the dynamic adaptive correction.
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。The above is only the preferred embodiment of the present invention, it should be pointed out that: for those skilled in the art, without departing from the principle of the present invention, several improvements and modifications can also be made, and these improvements and modifications are also It should be regarded as the protection scope of the present invention.
Claims (7)





























Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111438858.2ACN114398049B (en) | 2021-11-29 | 2021-11-29 | An adaptive dynamic update method for digital twin models of discrete manufacturing workshops |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111438858.2ACN114398049B (en) | 2021-11-29 | 2021-11-29 | An adaptive dynamic update method for digital twin models of discrete manufacturing workshops |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114398049Atrue CN114398049A (en) | 2022-04-26 |
| CN114398049B CN114398049B (en) | 2024-10-18 |
Family
ID=81225887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111438858.2AActiveCN114398049B (en) | 2021-11-29 | 2021-11-29 | An adaptive dynamic update method for digital twin models of discrete manufacturing workshops |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114398049B (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114596919A (en)* | 2022-05-10 | 2022-06-07 | 安徽瑞邦数科科技服务有限公司 | Index prediction method and system and application thereof in phosphoric acid production |
| CN114880930A (en)* | 2022-05-11 | 2022-08-09 | 北京半人科技有限公司 | Entity equipment digital twin modeling simulation prediction method based on online learning |
| CN115407947A (en)* | 2022-08-08 | 2022-11-29 | 浙江理工大学 | Design method of multi-unit printing equipment based on digital twinning |
| CN115544819A (en)* | 2022-12-06 | 2022-12-30 | 网思科技股份有限公司 | Digital twin modeling method, system and readable storage medium for maintenance station |
| CN115964934A (en)* | 2022-11-30 | 2023-04-14 | 南京邮电大学 | A method for constructing an intelligent computing engine for an artificial intelligence cross-platform model based on knowledge self-evolution |
| CN116700168A (en)* | 2023-06-02 | 2023-09-05 | 中国五洲工程设计集团有限公司 | Virtual-real synchronization method and system for production line |
| CN117608241A (en)* | 2024-01-24 | 2024-02-27 | 山东建筑大学 | Update methods, systems, devices and media for CNC machine tool digital twin models |
| CN117788721A (en)* | 2024-02-26 | 2024-03-29 | 彩讯科技股份有限公司 | Digital twin content display method, system and medium based on artificial intelligence |
| CN119294141A (en)* | 2024-12-11 | 2025-01-10 | 中国人民解放军92941部队 | A measurement and control equipment training method and system based on digital twin model |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190392815A1 (en)* | 2018-06-22 | 2019-12-26 | Genesys Telecommunications Laboratories, Inc. | System and method for f0 transfer learning for improving f0 prediction with deep neural network models |
| CN112949836A (en)* | 2021-04-08 | 2021-06-11 | 北京航空航天大学 | Method for carrying out regression prediction on-line migration learning on time-varying distribution data |
| US20240062119A1 (en)* | 2022-08-17 | 2024-02-22 | Schlumberger Technology Corporation | Field equipment data system |
| CN118244719A (en)* | 2024-03-22 | 2024-06-25 | 郑州大学 | Distributed anti-interference control method in discrete manufacturing process |
- 2021
- 2021-11-29CNCN202111438858.2Apatent/CN114398049B/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190392815A1 (en)* | 2018-06-22 | 2019-12-26 | Genesys Telecommunications Laboratories, Inc. | System and method for f0 transfer learning for improving f0 prediction with deep neural network models |
| CN112949836A (en)* | 2021-04-08 | 2021-06-11 | 北京航空航天大学 | Method for carrying out regression prediction on-line migration learning on time-varying distribution data |
| US20240062119A1 (en)* | 2022-08-17 | 2024-02-22 | Schlumberger Technology Corporation | Field equipment data system |
| CN118244719A (en)* | 2024-03-22 | 2024-06-25 | 郑州大学 | Distributed anti-interference control method in discrete manufacturing process |
Non-Patent Citations (1)
| Title |
|---|
| SHENGBO WANG 等: "A spatial-temporal feature fusion network for order remaining completion time prediction in discrete manufacturing workshop", INTERNATIONAL JOURNAL OF PRODUCTION RESEARCH, 17 August 2023 (2023-08-17), pages 3638 - 3653* |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114596919A (en)* | 2022-05-10 | 2022-06-07 | 安徽瑞邦数科科技服务有限公司 | Index prediction method and system and application thereof in phosphoric acid production |
| CN114880930A (en)* | 2022-05-11 | 2022-08-09 | 北京半人科技有限公司 | Entity equipment digital twin modeling simulation prediction method based on online learning |
| CN114880930B (en)* | 2022-05-11 | 2023-08-15 | 北京半人科技有限公司 | Online learning-based entity equipment digital twin modeling simulation prediction method |
| CN115407947A (en)* | 2022-08-08 | 2022-11-29 | 浙江理工大学 | Design method of multi-unit printing equipment based on digital twinning |
| CN115964934A (en)* | 2022-11-30 | 2023-04-14 | 南京邮电大学 | A method for constructing an intelligent computing engine for an artificial intelligence cross-platform model based on knowledge self-evolution |
| CN115544819A (en)* | 2022-12-06 | 2022-12-30 | 网思科技股份有限公司 | Digital twin modeling method, system and readable storage medium for maintenance station |
| CN116700168A (en)* | 2023-06-02 | 2023-09-05 | 中国五洲工程设计集团有限公司 | Virtual-real synchronization method and system for production line |
| CN116700168B (en)* | 2023-06-02 | 2024-07-05 | 中国五洲工程设计集团有限公司 | Virtual-real synchronization method and system for production line |
| CN117608241A (en)* | 2024-01-24 | 2024-02-27 | 山东建筑大学 | Update methods, systems, devices and media for CNC machine tool digital twin models |
| CN117608241B (en)* | 2024-01-24 | 2024-04-05 | 山东建筑大学 | Method, system, device and medium for updating digital twin model of CNC machine tool |
| CN117788721A (en)* | 2024-02-26 | 2024-03-29 | 彩讯科技股份有限公司 | Digital twin content display method, system and medium based on artificial intelligence |
| CN117788721B (en)* | 2024-02-26 | 2024-05-14 | 彩讯科技股份有限公司 | Digital twin content display method, system and medium based on artificial intelligence |
| CN119294141A (en)* | 2024-12-11 | 2025-01-10 | 中国人民解放军92941部队 | A measurement and control equipment training method and system based on digital twin model |
| CN119294141B (en)* | 2024-12-11 | 2025-03-07 | 中国人民解放军92941部队 | Measurement and control equipment training method and system based on digital twin model |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114398049B (en) | 2024-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114398049A (en) | An adaptive dynamic update method for digital twin model of discrete manufacturing workshop | |
| CN111414977B (en) | Weighted integration temperature sensitive point combination selection method for machine tool spindle thermal error modeling | |
| CN112749840A (en) | Method for acquiring reference value of energy efficiency characteristic index of thermal power generating unit | |
| CN110991723A (en) | Application method of artificial intelligence in seasonal load prediction | |
| CN119889819B (en) | Intelligent collaborative control method and system for cable twisting | |
| CN107511823B (en) | A Method for Optimal Analysis of Robot Trajectory | |
| CN112541296A (en) | SO2 prediction method based on PSO-LSSVM | |
| CN116909148B (en) | Control method and system for emulsion pump station | |
| Ma et al. | A health indicator construction method based on self-attention convolutional autoencoder for rotating machine performance assessment | |
| CN114740730A (en) | SVG parameter optimization identification method based on convolutional neural network | |
| CN116757545A (en) | A quality prediction method for multi-level manufacturing systems based on multi-task deep learning | |
| CN111507824A (en) | Wind control model mold-entering variable minimum entropy box separation method | |
| CN119845360A (en) | Greenhouse temperature data monitoring method and system based on data analysis | |
| CN115907178B (en) | Clean ecosystem CO 2 Exchange amount prediction method | |
| CN118689162A (en) | Guide rail and screw error compensation control method based on data fitting analysis | |
| CN110826794A (en) | Rolling prediction method and device for coal consumption benchmark value of power plant based on PSO optimized SVM | |
| CN110909492A (en) | Sewage treatment process soft measurement method based on extreme gradient lifting algorithm | |
| CN118521915B (en) | An automatic extraction method of unsupervised remote sensing field plots based on adaptive method | |
| CN114819382A (en) | A photovoltaic power prediction method based on LSTM | |
| CN118553340A (en) | A method for predicting the risk of hazardous chemicals in production safety | |
| CN118940901A (en) | A fast and efficient method for predicting feed conversion rate | |
| CN113705932B (en) | Short-term load prediction method and device | |
| CN115841184A (en) | Working hour prediction method based on process clustering | |
| CN114995284A (en) | Method and system for selecting and modeling heat sensitive points of machine tool | |
| CN113902193A (en) | A provincial monthly electricity consumption forecast method based on POFP-SVM algorithm |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB03 | Change of inventor or designer information | ||
| CB03 | Change of inventor or designer information | Inventor after:Tao Yaning Inventor after:Guo Yu Inventor after:Zhang Litong Inventor after:Zhang Hao Inventor after:Liu Sai Inventor after:Cui Kai Inventor after:Yan Lichao Inventor after:Qian Weiwei Inventor before:Qian Weiwei Inventor before:Guo Yu Inventor before:Zhang Litong Inventor before:Zhang Hao Inventor before:Liu Sai Inventor before:Cui Kai Inventor before:Yan Lichao Inventor before:Tao Yaning | |
| GR01 | Patent grant | ||
| GR01 | Patent grant |