CN114120688B - A method for establishing a car following model considering the information of the vehicle ahead in the V2V environment - Google Patents
A method for establishing a car following model considering the information of the vehicle ahead in the V2V environmentDownload PDFInfo
- Publication number
- CN114120688B CN114120688BCN202111407065.4ACN202111407065ACN114120688BCN 114120688 BCN114120688 BCN 114120688BCN 202111407065 ACN202111407065 ACN 202111407065ACN 114120688 BCN114120688 BCN 114120688B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- speed
- model
- car
- adjacent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription38
- 238000005457optimizationMethods0.000claimsabstractdescription50
- 230000000694effectsEffects0.000claimsabstractdescription24
- 230000035945sensitivityEffects0.000claimsdescription10
- 230000008569processEffects0.000description22
- 238000004458analytical methodMethods0.000description14
- 230000008859changeEffects0.000description13
- 239000000446fuelSubstances0.000description13
- 230000007935neutral effectEffects0.000description13
- 230000001133accelerationEffects0.000description10
- 230000007423decreaseEffects0.000description10
- 238000004088simulationMethods0.000description7
- 230000009471actionEffects0.000description6
- 230000008901benefitEffects0.000description6
- 238000011161developmentMethods0.000description3
- 230000006872improvementEffects0.000description3
- 230000003993interactionEffects0.000description3
- 230000009467reductionEffects0.000description3
- 238000011160researchMethods0.000description3
- 230000003247decreasing effectEffects0.000description2
- 230000007812deficiencyEffects0.000description2
- 230000009286beneficial effectEffects0.000description1
- 230000015572biosynthetic processEffects0.000description1
- 238000004364calculation methodMethods0.000description1
- 238000004891communicationMethods0.000description1
- 230000001419dependent effectEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 230000007246mechanismEffects0.000description1
- 230000004048modificationEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000000737periodic effectEffects0.000description1
- 230000008092positive effectEffects0.000description1
- 230000001568sexual effectEffects0.000description1
- 239000013589supplementSubstances0.000description1
- 230000002123temporal effectEffects0.000description1
- 230000007704transitionEffects0.000description1
Images





















Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Traffic Control Systems (AREA)
Abstract



Description
Translated fromChinese技术领域technical field
本发明涉及V2V环境下考虑前方车辆信息的跟驰模型建立方法,属于车路协同、智能交通技术领域。The invention relates to a method for establishing a car-following model in a V2V environment considering information of a vehicle ahead, and belongs to the technical fields of vehicle-road coordination and intelligent transportation.
背景技术Background technique
近年来,随着机动化的进一步发展,道路上机动车数量急剧增加,交通拥堵频频发生,已成为城市交通中最常见、最主要的问题之一,严重制约了城市的发展以及经济的繁荣。为解决此问题,人们对交通流特征以及交通拥堵形成的机理展开研究,其中针对驾驶员个体行为进行描述的跟驰模型得到了人们广泛的关注。In recent years, with the further development of motorization, the number of motor vehicles on the road has increased sharply, and traffic congestion has occurred frequently, which has become one of the most common and most important problems in urban traffic, which seriously restricts the development of the city and the prosperity of the economy. In order to solve this problem, people have carried out research on the characteristics of traffic flow and the formation mechanism of traffic congestion. Among them, the car-following model that describes the individual behavior of drivers has received extensive attention.
在V2V通信环境下,驾驶员能够准确、广泛的获取周边车辆的信息,因此大量基于车辆间信息交互,针对多车平均速度、平均预期速度、平均车头间距等信息的跟驰模型研究得以开展,提出了考虑多前车速度波动的跟驰模型、考虑广义前方车辆的跟驰模型、考虑前方车辆群平均预期速度、平均速度效应的跟驰模型等。In the V2V communication environment, the driver can accurately and widely obtain the information of the surrounding vehicles. Therefore, a large number of car-following models based on the information interaction between vehicles have been carried out for the average speed, average expected speed, and average head-to-head distance of multiple vehicles. A car-following model considering the speed fluctuations of multiple preceding vehicles, a car-following model considering the generalized preceding vehicle, and a car-following model considering the average expected speed of the preceding vehicle group and the effect of average speed are proposed.
关于V2V环境下的跟驰模型研究,大部分假设周边车辆对目标车辆的影响是相同的,引入的信息为车辆群预期速度及车头间距的平均值,这一假设能够较好的应用于自动驾驶环境。然而,目前由于道路上的车辆主要由人工驾驶,其视野中存在的车辆往往为前方邻近、次邻近车辆,在这种情况下,提供平均信息不一定会对交通流稳定性、城市道路机动车运行效益起好的作用。另一方面,虽然一部分V2V环境下的跟驰模型研究认为周边车辆会对目标车辆造成不同影响,但他们对预期速度、速度信息作用强度大小及作用强度关系影响的关注度不够。Regarding the research on car-following models in the V2V environment, most of them assume that the influence of surrounding vehicles on the target vehicle is the same, and the information introduced is the average value of the expected speed of the vehicle group and the distance between the heads of the vehicles. This assumption can be better applied to automatic driving. surroundings. However, at present, because the vehicles on the road are mainly driven by humans, the vehicles in the field of vision are often the vehicles in the front and the next neighbors. Operational efficiency plays a good role. On the other hand, although some car-following model studies in the V2V environment believe that surrounding vehicles will have different effects on the target vehicle, they do not pay enough attention to the expected speed, the effect of speed information, and the effect of the relationship between the effect.
发明内容SUMMARY OF THE INVENTION
针对现有V2V环境下的跟驰模型假设周边车辆对目标车辆的影响相同,使得模型对交通流稳定性的描述效果差,以及模型难以应用于V2V环境人工驾驶背景的问题,本发明提供一种V2V环境下考虑前方车辆信息的跟驰模型建立方法。Aiming at the problems that the car following model in the existing V2V environment assumes that the surrounding vehicles have the same impact on the target vehicle, the model has a poor description effect on the traffic flow stability, and the model is difficult to apply to the artificial driving background in the V2V environment. A method for establishing a car-following model considering the information of the vehicle ahead in the V2V environment.
本发明的一种V2V环境下考虑前方车辆信息的跟驰模型建立方法,所述前方车辆包括前方邻近车辆和前方次邻近车辆;包括,A method for establishing a car-following model in a V2V environment of the present invention considering information of a preceding vehicle, wherein the preceding vehicle includes a preceding adjacent vehicle and a preceding next adjacent vehicle; including,
以全速差模型为基础,全速差模型为:Based on the full speed difference model, the full speed difference model is:

式中α表示第n辆车驾驶员的敏感系数;V(Δxn(t))表示第n辆车的预期速度,vn(t)表示第n辆车在t时刻的速度,Δvn(t)表示车辆n与前方邻近车辆n+1在t时刻的速度差,Δxn(t)表示车辆n与前方邻近车辆n+1在t时刻的车头间距差,xn(t)表示第n辆车在t时刻的位置,λ表示第n辆车驾驶员对相对速度刺激的敏感系数;where α represents the sensitivity coefficient of the driver of the nth vehicle; V(Δxn (t)) represents the expected speed of the nth vehicle,vn (t) represents the speed of the nth vehicle at time t, andΔvn ( t) represents the speed difference between the vehicle n and the neighboring vehicle n+1 ahead at time t, Δxn (t) represents the head distance difference between the vehicle n and the neighboring vehicle n+1 ahead at time t, and xn (t) represents the nth The position of the vehicle at time t, λ represents the sensitivity coefficient of the driver of the nth vehicle to the relative speed stimulus;
其中V(Δxn(t))=V1+V2tanh[C1(Δxn(t)-lc)-C2],where V(Δxn (t))=V1 +V2 tanh[C1 (Δxn (t)-lc )-C2 ],
式中V1、V2、C1、C2和lc均为常参数,where V1 , V2 , C1 ,C2 and lc are constant parameters,
V1=6.75m/s,V2=7.91m/s,C1=0.13m-1,C2=1.57,lc=5m;V1 =6.75m/s, V2 =7.91m/s, C1 =0.13m-1 , C2 =1.57, lc =5m;
Δxn(t)=xn+1(t)-xn(t),Δxn (t )=xn+1 (t)-xn(t),
式中xn+1(t)表示第n+1辆车在t时刻的位置xn(t);where xn+1 (t) represents the position xn (t) of the n+1th vehicle at time t;
对全速差模型引入前方邻近车辆和前方次邻近车辆的平均速度

式中p表示前方邻近车辆n+1在t时刻的速度对第n辆车的作用强度,q表示前方邻近车辆和前方次邻近车辆的平均速度对第n辆车的作用强度,p+q=1;In the formula,p represents the effect strength of the speed of the adjacent vehicle n+1 in front on the nth vehicle at time t,q represents the effect intensity of the average speed of the front adjacent vehicle and the next adjacent vehicle on the nth vehicle, p+q= 1;

式中vn+1(t)为前方邻近车辆的速度,vn+2(t)为前方次邻近车辆的速度。where vn+1 (t) is the speed of the adjacent vehicle in front, and vn+2 (t) is the speed of the next adjacent vehicle in front.
根据本发明的V2V环境下考虑前方车辆信息的跟驰模型建立方法,对一次优化后的跟驰模型引入前方邻近车辆的预期速度V(Δxn+1(t))和前方次邻近车辆的预期速度V(Δxn+2(t)),得到二次优化后的跟驰模型:According to the method for establishing a car-following model considering the information of the vehicle ahead in the V2V environment of the present invention, the expected speed V(Δxn+1 (t)) of the adjacent vehicle in front and the expectation of the next-adjacent vehicle in front are introduced into the car-following model after an optimization. Speed V(Δxn+2 (t)), the car following model after quadratic optimization is obtained:

式中β1为前方邻近车辆预期速度对第n辆车的作用强度,β2为前方次邻近车辆预期速度对第n辆车的作用强度,满足如下表达式:In the formula, β1 is the effect strength of the expected speed of the adjacent vehicle ahead on the nth vehicle, and β2 is the effect strength of the expected speed of the next adjacent vehicle in front on the nth vehicle, which satisfies the following expression:
β=β1+β2,β≤0.5,β2=γβ1,γ≤1,γ为控制系数;β=β1 +β2 , β≤0.5, β2 =γβ1 , γ≤1,γ is the control coefficient;
式中β表示前方邻近车辆的预期速度和前方次邻近车辆的预期速度对第n辆车作用强度和,进一步满足如下表达式:In the formula, β represents the expected speed of the adjacent vehicle in front and the expected speed of the next adjacent vehicle in front of the nth vehicle.
βVm(Δxn(t))=β1(V(Δxn+1(t))-V(Δxn(t)))+β2(V(Δxn+2(t))-V(Δxn(t))),βVm (Δxn (t))=β1 (V(Δxn+1 (t))-V(Δxn (t)))+β2 (V(Δxn+2 (t))-V( Δxn (t))),
Vm为自定义参数,表示第n辆车驾驶员根据前方邻近车辆的预期速度和前方次邻近车辆的预期速度获得的第n辆车当前预期速度。Vm is a self-defined parameter, which represents the current expected speed of the n-th vehicle obtained by the driver of the n-th vehicle according to the expected speed of the adjacent vehicle in front and the expected speed of the next-adjacent vehicle in front.
根据本发明的V2V环境下考虑前方车辆信息的跟驰模型建立方法,According to the method for establishing a car-following model considering the information of the vehicle ahead in the V2V environment of the present invention,
假设相邻车辆间的车头间距为h,则一次优化后的跟驰模型的稳定性条件为:Assuming that the head-to-head distance between adjacent vehicles is h, the stability conditions of the car-following model after one optimization are:
α>2V'(h)-(2p+3q)λ,α>2V'(h)-(2p+3q)λ,
式中V(h)为对应车头间距h获得的当前车辆预期速度。where V(h ) is the current expected speed of the vehicle obtained corresponding to the head-to-head distance h.
根据本发明的V2V环境下考虑前方车辆信息的跟驰模型建立方法,According to the method for establishing a car-following model considering the information of the vehicle ahead in the V2V environment of the present invention,
假设相邻车辆间的车头间距为h,则二次优化后的跟驰模型的稳定性条件为:Assuming that the head-to-head distance between adjacent vehicles is h, the stability condition of the car-following model after quadratic optimization is:

式中V(h)为对应车头间距h获得的当前车辆预期速度。where V(h) is the current expected speed of the vehicle obtained corresponding to the head-to-head distance h.
本发明的有益效果:本发明提出了一种V2V环境下考虑前方邻近、次邻近车辆信息的跟驰模型,通过理论及数值仿真结果表明,本发明的模型能够有效提高交通流的稳定性,且交通流稳定性随预期速度信息作用强度和的增加而提高,作用强度关系改变产生的影响较小;平均速度信息对交通流稳定性贡献较小,但与预期速度信息作用叠加具有好的效益;模型能提供更平滑的信号交叉口车辆启动、制动过程,能减少油耗及排放。Beneficial effects of the present invention: The present invention proposes a car-following model that considers the information of adjacent and sub-adjacent vehicles ahead in a V2V environment. The theoretical and numerical simulation results show that the model of the present invention can effectively improve the stability of traffic flow, and The traffic flow stability increases with the increase of the expected speed information action intensity sum, and the effect of the change in the action intensity relationship is small; the average speed information contributes little to the traffic flow stability, but superimposed with the expected speed information has good benefits; The model can provide a smoother starting and braking process of vehicles at signalized intersections, which can reduce fuel consumption and emissions.
附图说明Description of drawings
图1是本发明所述V2V环境下考虑前方车辆信息的跟驰模型建立方法的流程图;1 is a flowchart of a method for establishing a car-following model considering vehicle information ahead in a V2V environment according to the present invention;
图2是令λ=0.3,γ=0.5,q=0.2,得到当β2=0.5β1时,不同β下的中性稳定曲线和共存曲线;Fig. 2 is set λ=0.3, γ=0.5, q=0.2 to obtain the neutral stability curve and coexistence curve under different β when β2 =0.5β1 ;
图3是λ=0.3,β=0.2,q=0.2时,不同γ下的中性稳定曲线和共存曲线;Figure 3 is the neutral stability curve and coexistence curve under different γ when λ=0.3, β=0.2, q=0.2;
图4是λ=0.3,γ=0.5,β=0.2时,不同p,q关系下的中性稳定曲线和共存曲线;Figure 4 is the neutral stability curve and coexistence curve under different p, q relationships when λ=0.3, γ=0.5, β=0.2;
图5是λ=0.3,γ=0.5时,不同p,q关系及不同β下的中性稳定曲线和共存曲线;Figure 5 is the neutral stability curve and coexistence curve under different p, q relationships and different β when λ=0.3, γ=0.5;
图6是t=2700s后密度波的时空演化情况下,FVD模型密度波的时空演化;Figure 6 is the time-space evolution of the density wave in the FVD model under the condition of the time-space evolution of the density wave after t=2700s;
图7是t=2700s后密度波的时空演化情况下,β=0.1,γ=0.5,q=0.2情况下密度波的时空演化;Figure 7 shows the spatiotemporal evolution of density waves after t=2700s, β=0.1, γ=0.5, q=0.2;
图8是t=2700s后密度波的时空演化情况下,β=0.2,γ=0.5,q=0.2情况下密度波的时空演化;Figure 8 shows the spatiotemporal evolution of density waves after t=2700s, β=0.2, γ=0.5, q=0.2;
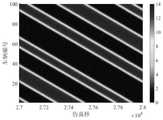
图9是t=2700s后密度波的时空演化情况下,β=0.3,γ=0.5,q=0.2情况下密度波的时空演化;Figure 9 shows the spatiotemporal evolution of density waves after t=2700s, β=0.3, γ=0.5, q=0.2;
图10是t=2700s后,FVD模型车辆速度的变化;Figure 10 is the change of the vehicle speed of the FVD model after t=2700s;
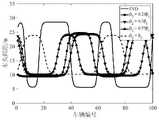
图11是t=2700s后,β=0.1,γ=0.5,q=0.2条件下二次优化后的跟驰模型车辆速度的变化;Figure 11 shows the change of the vehicle speed of the car-following model after secondary optimization under the conditions of β=0.1, γ=0.5, q=0.2 after t=2700s;
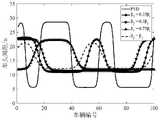
图12是t=2700s后,β=0.2,γ=0.5,q=0.2条件下二次优化后的跟驰模型车辆速度的变化;Figure 12 shows the change of vehicle speed of the car following model after secondary optimization under the conditions of β=0.2, γ=0.5, q=0.2 after t=2700s;
图13是t=2700s后,β=0.3,γ=0.5,q=0.2条件下二次优化后的跟驰模型车辆速度的变化;Figure 13 shows the change of vehicle speed of the car following model after secondary optimization under the condition of β=0.3, γ=0.5, q=0.2 after t=2700s;
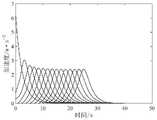
图14是t=2700s时FVD模型和不同β下二次优化后的跟驰模型的车头间距分布;Fig. 14 is the head-to-head distance distribution of the FVD model and the car-following model after quadratic optimization under different β at t=2700s;
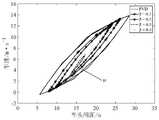
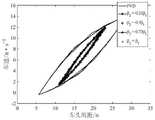
图15是FVD模型以及γ=0.5,q=0.2时,不同β下二次优化后的跟驰模型的速度-车头间距轨迹;Figure 15 is the speed-head distance trajectory of the FVD model and the car-following model after quadratic optimization under different β when γ=0.5, q=0.2;
图16是β=0.2时不同γ下二次优化后的跟驰模型的车头间距分布;Figure 16 is the head-to-head distance distribution of the car-following model after quadratic optimization under different γ when β=0.2;
图17是β=0.3时不同γ下二次优化后的跟驰模型的车头间距分布;Figure 17 is the head-to-head distance distribution of the car-following model after quadratic optimization under different γ when β=0.3;
图18是β=0.2时不同γ下二次优化后的跟驰模型的速度-车头间距轨迹;Figure 18 is the speed-head distance trajectory of the car-following model after quadratic optimization under different γ when β=0.2;
图19是β=0.3时不同γ下二次优化后的跟驰模型的速度-车头间距轨迹;Figure 19 is the speed-head distance trajectory of the car-following model after quadratic optimization under different γ when β=0.3;
图20是在基本参数设置条件下,FVD模型的时间速度曲线;Figure 20 is the time velocity curve of the FVD model under the basic parameter setting conditions;
图21是在基本参数设置条件下,二次优化后的跟驰模型的时间速度曲线;Figure 21 is the time-speed curve of the car-following model after secondary optimization under the basic parameter setting conditions;
图22是在基本参数设置条件下,FVD模型的时间加速度曲线;Figure 22 is the time acceleration curve of the FVD model under the basic parameter setting conditions;
图23是在基本参数设置条件下,二次优化后的跟驰模型的时间加速度曲线;Figure 23 is the time acceleration curve of the car-following model after secondary optimization under the basic parameter setting conditions;
图24是制动过程中,FVD模型的时间速度曲线;Figure 24 is the time speed curve of the FVD model during the braking process;
图25是制动过程中,二次优化后的跟驰模型的时间速度曲线;Figure 25 is the time-speed curve of the car-following model after secondary optimization during the braking process;
图26是制动过程中,FVD模型的时间加速度曲线;Figure 26 is the time acceleration curve of the FVD model during the braking process;
图27是制动过程中,二次优化后的跟驰模型的时间加速度曲线。Fig. 27 is the time acceleration curve of the car following model after quadratic optimization during the braking process.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present invention.
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。It should be noted that the embodiments of the present invention and the features of the embodiments may be combined with each other under the condition of no conflict.
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。The present invention will be further described below with reference to the accompanying drawings and specific embodiments, but it is not intended to limit the present invention.
具体实施方式一、结合图1所示,本发明提供了一种V2V环境下考虑前方车辆信息的跟驰模型建立方法,所述前方车辆包括前方邻近车辆和前方次邻近车辆;包括,DETAILED DESCRIPTION OF THE
以全速差模型为基础,全速差模型为:Based on the full speed difference model, the full speed difference model is:

式中α表示第n辆车驾驶员的敏感系数;V(Δxn(t))表示第n辆车的预期速度,vn(t)表示第n辆车在t时刻的速度,Δvn(t)表示车辆n与前方邻近车辆n+1在t时刻的速度差,Δxn(t)表示车辆n与前方邻近车辆n+1在t时刻的车头间距差,xn(t)表示第n辆车在t时刻的位置,λ表示第n辆车驾驶员对相对速度刺激的敏感系数;where α represents the sensitivity coefficient of the driver of the nth vehicle; V(Δxn (t)) represents the expected speed of the nth vehicle,vn (t) represents the speed of the nth vehicle at time t, andΔvn ( t) represents the speed difference between the vehicle n and the neighboring vehicle n+1 ahead at time t, Δxn (t) represents the head distance difference between the vehicle n and the neighboring vehicle n+1 ahead at time t, and xn (t) represents the nth The position of the vehicle at time t, λ represents the sensitivity coefficient of the driver of the nth vehicle to the relative speed stimulus;
其中V(Δxn(t))=V1+V2tanh[C1(Δxn(t)-lc)-C2],where V(Δxn (t))=V1 +V2 tanh[C1 (Δxn (t)-lc )-C2 ],
式中V1、V2、C1、C2和lc均为常参数,where V1 , V2 , C1 ,C2 and lc are constant parameters,
V1=6.75m/s,V2=7.91m/s,C1=0.13m-1,C2=1.57,lc=5m;V1 =6.75m/s, V2 =7.91m/s, C1 =0.13m-1 , C2 =1.57, lc =5m;
Δxn(t)=xn+1(t)-xn(t),Δxn (t )=xn+1 (t)-xn(t),
式中xn+1(t)表示第n+1辆车在t时刻的位置xn(t);where xn+1 (t) represents the position xn (t) of the n+1th vehicle at time t;
对全速差模型引入前方邻近车辆和前方次邻近车辆的平均速度

式中p表示前方邻近车辆n+1在t时刻的速度对第n辆车的作用强度,q表示前方邻近车辆和前方次邻近车辆的平均速度对第n辆车的作用强度,p+q=1;In the formula,p represents the effect strength of the speed of the adjacent vehicle n+1 in front on the nth vehicle at time t,q represents the effect intensity of the average speed of the front adjacent vehicle and the next adjacent vehicle on the nth vehicle, p+q= 1;

式中vn+1(t)为前方邻近车辆的速度,vn+2(t)为前方次邻近车辆的速度。where vn+1 (t) is the speed of the adjacent vehicle in front, and vn+2 (t) is the speed of the next adjacent vehicle in front.
一次优化后的跟驰模型可提高交通流稳定性,并且驾驶员能够更清楚的感知次邻近车辆的速度信息。The one-time optimized car-following model can improve the traffic flow stability, and the driver can perceive the speed information of the next-neighboring vehicles more clearly.
本发明的模型旨在探究人工驾驶应用背景下提供预期速度信息、平均速度信息时对交通流特征、车辆运行特征的影响:理论分析模型中预期速度信息、平均速度信息对交通流稳定性的贡献及重要性,分析信息作用强度、作用强度关系、不同信息类型对交通流稳定性的影响;通过对车辆启动、车辆制动及扰动传播三种场景进行数值仿真,深化理论分析结果并明确模型的交通流特性以及节油减排效益,可对现有研究成果中的不足进行补充。The model of the present invention aims to explore the impact of providing expected speed information and average speed information on traffic flow characteristics and vehicle operation characteristics in the context of artificial driving applications: theoretical analysis of the contribution of expected speed information and average speed information to traffic flow stability in the model and importance, analyze the information action intensity, action intensity relationship, and the influence of different information types on traffic flow stability; through the numerical simulation of three scenarios of vehicle starting, vehicle braking and disturbance propagation, the theoretical analysis results are deepened and the model is clarified. The characteristics of traffic flow and the benefits of fuel saving and emission reduction can supplement the deficiencies in the existing research results.
本实施方式旨在研究同等条件下模型的交通流稳定性、交通流特性及节油减排效益,故做出一定的假设便于研究的顺利开展:(1)驾驶环境为完全由V2V车辆组成的交通流,且均为人工驾驶;(2)只考虑小型车的运行,不考虑其他车型、非机动车以及行人因素;(3)仅考虑燃油车,不考虑电动车或混动车等;(4)车辆信息之间的交互与共享不存在延迟。The purpose of this implementation is to study the traffic flow stability, traffic flow characteristics, and fuel saving and emission reduction benefits of the model under the same conditions. Therefore, certain assumptions are made to facilitate the smooth development of the study: (1) The driving environment is composed of V2V vehicles. Traffic flow, and all are manually driven; (2) only consider the operation of small cars, ignoring other vehicle models, non-motor vehicles and pedestrian factors; (3) only consider fuel vehicles, not electric vehicles or hybrid vehicles, etc.; (4) ) There is no delay in the interaction and sharing of vehicle information.
本实施方式中的全速差模型(FVD)模型能够较为真实的反映实际交通状况,并在研究交通流稳定性方面表现出良好的性能。然而,FVD模型仅反映了车辆与其前车间的相互作用,但在实际交通状况下,驾驶员不仅关心前方邻近车辆,还关注次邻近车辆以及其他车辆,且对前方邻近车辆的关注度要高于其他车辆。在V2V环境下,驾驶员能够获得前方车辆准确的运动信息,能够更有效的对这些信息做出反应。The Full Velocity Difference (FVD) model in this embodiment can more realistically reflect actual traffic conditions, and has good performance in studying traffic flow stability. However, the FVD model only reflects the interaction between the vehicle and the vehicle in front of it, but in actual traffic conditions, the driver not only pays attention to the adjacent vehicles in front, but also pays attention to the next-adjacent vehicles and other vehicles, and pays more attention to the adjacent vehicles in front than other vehicles. In the V2V environment, the driver can obtain accurate motion information of the vehicle ahead, and can respond to this information more effectively.
本实施方式建模选择的V2V环境及人工驾驶背景的优势在于,在未来一段时间内,道路上的车辆仍将主要由人工驾驶。V2V技术发展势头迅猛,在未来还会更加普及,因此基于V2V建立的模型能够具有一定的应用价值。The advantage of the V2V environment and manual driving background selected for modeling in this embodiment is that, in the future, vehicles on the road will still be mainly driven by humans. V2V technology is developing rapidly and will become more popular in the future, so the model based on V2V can have certain application value.
本发明用于研究预期速度信息作用强度和、作用强度关系、不同信息类型对交通流稳定性的影响。故假设在V2V环境人工驾驶背景下提供的信息为前方邻近、次邻近车辆的预期速度以及两者的平均速度。The present invention is used to study the relationship between the expected speed information action intensity and action intensity, and the influence of different information types on traffic flow stability. Therefore, it is assumed that the information provided in the context of manual driving in the V2V environment is the expected speed of the neighboring and next-adjacent vehicles ahead and the average speed of the two.
进一步,对一次优化后的跟驰模型引入前方邻近车辆的预期速度V(Δxn+1(t))和前方次邻近车辆的预期速度V(Δxn+2(t)),得到二次优化后的跟驰模型:Further, the expected speed V(Δxn+1 (t)) of the adjacent vehicle ahead and the expected speed V(Δxn+2 (t)) of the next adjacent vehicle in front are introduced into the car following model after the primary optimization, and the secondary optimization is obtained. The following car-following model:

式中β1为前方邻近车辆预期速度对第n辆车的作用强度,β2为前方次邻近车辆预期速度对第n辆车的作用强度,满足如下表达式:In the formula, β1 is the effect strength of the expected speed of the adjacent vehicle ahead on the nth vehicle, and β2 is the effect strength of the expected speed of the next adjacent vehicle in front on the nth vehicle, which satisfies the following expression:
β=β1+β2,β≤0.5,β2=γβ1,γ≤1,γ为控制系数;β=β1 +β2 , β≤0.5, β2 =γβ1 , γ≤1, γ is the control coefficient;
式中β表示前方邻近车辆的预期速度和前方次邻近车辆的预期速度对第n辆车作用强度和,进一步满足如下表达式:In the formula, β represents the expected speed of the adjacent vehicle in front and the expected speed of the next adjacent vehicle in front of the nth vehicle.
βVm(Δxn(t))=β1(V(Δxn+1(t))-V(Δxn(t)))+β2(V(Δxn+2(t))-V(Δxn(t))),βVm (Δxn (t))=β1 (V(Δxn+1 (t))-V(Δxn (t)))+β2 (V(Δxn+2 (t))-V( Δxn (t))),
Vm为自定义参数,表示第n辆车驾驶员根据前方邻近车辆的预期速度和前方次邻近车辆的预期速度获得的第n辆车当前预期速度。Vm is a self-defined parameter, which represents the current expected speed of the n-th vehicle obtained by the driver of the n-th vehicle according to the expected speed of the adjacent vehicle in front and the expected speed of the next-adjacent vehicle in front.
二次优化后的跟驰模型可进一步提高交通流稳定性。利用此模型,驾驶员既能够清楚感知前方邻近、次邻近车辆的速度信息,还能够提前获取前方车辆拟采取的驾驶行为。The car-following model after secondary optimization can further improve the traffic flow stability. Using this model, the driver can not only clearly perceive the speed information of the adjacent and sub-adjacent vehicles ahead, but also obtain the driving behavior that the vehicle ahead intends to take in advance.
再进一步,假设相邻车辆间的车头间距为h,则一次优化后的跟驰模型的稳定性条件为:Further, assuming that the head-to-head distance between adjacent vehicles is h, the stability condition of the car-following model after one optimization is:
α>2V'(h)-(2p+3q)λ,α>2V'(h)-(2p+3q)λ,
式中V(h)为对应车头间距h获得的当前车辆预期速度。where V(h) is the current expected speed of the vehicle obtained corresponding to the head-to-head distance h.
传统FVD模型的稳定性条件为:The stability conditions of the traditional FVD model are:
α>2V'(h)-2λ,α>2V'(h)-2λ,
相较于传统FVD模型,一次优化后的模型稳定区域增大,能够提高交通流的稳定性。Compared with the traditional FVD model, the stable area of the model after one optimization is enlarged, which can improve the stability of traffic flow.
进一步,假设相邻车辆间的车头间距为h,则二次优化后的跟驰模型的稳定性条件为:Further, assuming that the head-to-head distance between adjacent vehicles is h, the stability conditions of the car-following model after secondary optimization are:

式中V(h)为对应车头间距h获得的当前车辆预期速度。where V(h) is the current expected speed of the vehicle obtained corresponding to the head-to-head distance h.
同样,相较于传统FVD模型,二次优化后的模型稳定区域增大,能够进一步提高交通流的稳定性。Similarly, compared with the traditional FVD model, the stable area of the model after secondary optimization is enlarged, which can further improve the stability of traffic flow.
为了探究前方邻近车辆、次邻近车辆预期速度、平均速度对交通流稳定性的影响,可对本发明提出的跟驰模型进行线性稳定性分析。当车辆以恒定的车头时距h以及最佳速度V(h)行驶时,交通流达到稳定状态。In order to explore the influence of the expected speed and average speed of the neighboring vehicles ahead and the next neighboring vehicles on the traffic flow stability, the linear stability analysis of the car following model proposed by the present invention can be carried out. When the vehicle travels with a constant headway h and an optimal speed V(h), the traffic flow reaches a steady state.
令λ=0.3,γ=0.5,q=0.2,得到当β2=0.5β1时,得到不同β下的中性稳定曲线(实线)和由mKdV方程得到的车头间距-灵敏度空间(Δxn,α)中的共存曲线(虚线),如图2所示,曲线顶点代表对应条件下的临界点(hc,αc)。中性稳定曲线和相应的共存曲线将交通流划分为三个区域:稳定区、亚稳定区以及不稳定区。中性稳定线上方的区域为稳定区,加入小扰动时,不会发生交通拥堵;在其下方的亚稳定区、不稳定区,交通流不稳定,受扰动时交通流会随时间演变为拥堵。从图2中可以明显看出,与FVD模型相比,二次优化后的跟驰模型的稳定区域更大,能够有效提高交通流的稳定性。随着β的增加,临界点对应的αc减小,中性稳定曲线逐渐下降,模型的不稳定区域逐渐收缩,稳定区域逐渐扩大,这表明如果驾驶员更关注前方邻近、次邻近车辆的预期速度信息,能够增强交通流的稳定性,在一定程度上抑制交通拥堵。此外,从图2中能够看出,当β由0变为0.1及由0.1变为0.2这两个阶段,稳定区域的变化幅度较大;当β进一步提高时,其对交通流稳定性的提高水平不明显,说明驾驶员无需对预期速度信息过于敏感,也能够在一定程度上提高交通流稳定性。Let λ=0.3, γ=0.5, q=0.2, when β2 =0.5β1 , the neutral stability curve (solid line) under different β and the head distance-sensitivity space (Δxn ) obtained by the mKdV equation are obtained , α) in the coexistence curve (dotted line), as shown in Figure 2, the apex of the curve represents the critical point (hc , αc ) under the corresponding conditions. The neutral stability curve and the corresponding coexistence curve divide the traffic flow into three regions: the stable region, the metastable region, and the unstable region. The area above the neutral stability line is a stable area. When small disturbances are added, traffic congestion will not occur; in the metastable and unstable areas below it, the traffic flow is unstable. When disturbed, the traffic flow will evolve into congestion over time. . It can be clearly seen from Fig. 2 that, compared with the FVD model, the stability area of the car following model after the secondary optimization is larger, which can effectively improve the stability of the traffic flow. With the increase of β, the αc corresponding to the critical point decreases, the neutral stability curve gradually decreases, the unstable region of the model gradually shrinks, and the stable region gradually expands. Speed information can enhance the stability of traffic flow and suppress traffic congestion to a certain extent. In addition, it can be seen from Figure 2 that when β changes from 0 to 0.1 and from 0.1 to 0.2, the changes in the stable region are larger; when β is further increased, it improves the stability of traffic flow. The level is not obvious, indicating that the driver does not need to be too sensitive to the expected speed information, and can also improve the traffic flow stability to a certain extent.
图3给出了λ=0.3,β=0.2,q=0.2时,不同γ下的中性稳定曲线和车头间距-灵敏度空间(Δxn,α)中的共存曲线。从图3可以看出,当β一定时,随着γ的增大即β2的增大,临界点对应的αc减小,中性稳定曲线逐渐下降,模型的稳定区域逐渐扩大,不稳定区域逐渐收缩。这表明在β一定的情况下,如果驾驶员更关注次邻近车辆的预期速度信息,会提高交通流的稳定性,对于抑制交通拥堵有正面作用。需要说明的是,这种影响相较于β增加的影响而言较小,β对交通流稳定性的影响要大于γ的影响。此外,从β2=0,β2=β1及β2=0.25β1对应的三条中性稳定曲线能够看出:即使是充分考虑次邻近车辆的影响,其对交通流稳定性的提高水平也不明显;而不充分考虑次邻近车辆的影响,其对交通流稳定性的贡献接近β2=0的情况。进一步可以推出,后续车辆的预期速度信息对交通流稳定性的影响会更小,尤其是在驾驶员对其关注度不足的情况下,甚至可能出现多信息使驾驶员分心的情况,能够验证二次优化后的跟驰模型的合理性。Figure 3 shows the neutral stability curve and the coexistence curve in the head distance-sensitivity space (Δxn , α) under differentγ when λ=0.3, β=0.2, q=0.2. It can be seen from Figure 3 that when β is constant, with the increase of γ, that is, the increase of β2 , the αc corresponding to the critical point decreases, the neutral stability curve gradually decreases, the stable region of the model gradually expands, and the instability The area gradually shrinks. This shows that under a certain β, if the driver pays more attention to the expected speed information of the next-adjacent vehicles, the stability of the traffic flow will be improved, and it will have a positive effect on suppressing traffic congestion. It should be noted that this effect is smaller than the effect of increasing β, and the effect of β on traffic flow stability is greater than that of γ. In addition, from the three neutral stability curves corresponding to β2 =0, β2 =β1 and β2 =0.25β1 , it can be seen that even if the influence of the next adjacent vehicle is fully considered, its level of improvement in traffic flow stability It is also not obvious; the influence of next-neighbor vehicles is not fully considered, and its contribution to traffic flow stability is close to the case of β2 =0. It can be further deduced that the expected speed information of the subsequent vehicles will have less impact on the stability of the traffic flow, especially when the driver does not pay enough attention to it, and there may even be a situation where the driver is distracted by multiple information, which can be verified. Rationality of the car following model after quadratic optimization.
图4给出了λ=0.3,γ=0.5,β=0.2时,不同p,q关系下的中性稳定曲线和车头间距-灵敏度空间(Δxn,α)中的共存曲线;图5给出了λ=0.3,γ=0.5时,不同p,q关系及不同β下的中性稳定曲线和车头间距-灵敏度空间(Δxn,α)中的共存曲线。从图4和图5中能够看出,仅提供前方邻近、次邻近车辆平均速度信息时,稳定区域变化不大,且平均速度信息作用强度变化时,对交通流稳定性的影响也较小。仅提供预期速度信息时,二次优化后的跟驰模型稳定区域扩张较大,且预期速度信息作用强度和变化时,对交通流稳定性的影响要较大。Figure 4 shows the neutral stability curve and the coexistence curve in the head distance-sensitivity space (Δxn , α) under different p, q relationships when λ=0.3, γ=0.5, β=0.2; Figure 5 gives When λ=0.3 and γ=0.5, the neutral stability curve and the coexistence curve in the head distance-sensitivity space (Δxn ,α) under different p, q relationships and different β are obtained. It can be seen from Figure 4 and Figure 5 that when only the average speed information of the adjacent and next adjacent vehicles in front is provided, the stable area does not change much, and when the strength of the average speed information changes, the impact on the traffic flow stability is also small. When only the expected speed information is provided, the stable area of the car following model after the secondary optimization expands greatly, and when the expected speed information acts and changes, the impact on the traffic flow stability is greater.
从上述分析能够发现,前方邻近、次邻近车辆平均速度信息对交通流稳定性的贡献要远小于两者的预期速度信息。Kuang等认为前方每一辆车的预期速度信息、速度信息对目标车辆的影响都是相同的,在高度自动驾驶环境下分析信息的平均值对交通流稳定性的影响及不同平均信息类型对稳定性的贡献。而本实施方式是在V2V环境人工驾驶背景下开展的,认为前方邻近车辆的预期速度信息、速度信息对目标车辆的影响要大于次邻近车辆。此外,虽然平均速度信息对交通流稳定性的贡献不大,但在提供预期速度信息的基础上,再提供相应的平均速度信息,能在一定程度上进一步提高交通流的稳定性。From the above analysis, it can be found that the contribution of the average speed information of the adjacent and next adjacent vehicles to the traffic flow stability is much smaller than the expected speed information of the two. Kuang et al. believed that the expected speed information and speed information of each vehicle ahead had the same impact on the target vehicle, and analyzed the impact of the average value of information on traffic flow stability and the impact of different average information types on stability in a highly automated driving environment. sexual contribution. However, this embodiment is carried out in the context of manual driving in a V2V environment, and it is believed that the expected speed information and speed information of the adjacent vehicles ahead have a greater impact on the target vehicle than the next-adjacent vehicles. In addition, although the average speed information does not contribute much to the stability of the traffic flow, providing the corresponding average speed information on the basis of the expected speed information can further improve the stability of the traffic flow to a certain extent.
为了进一步探究前方邻近、次邻近车辆预期速度、平均速度对交通流的影响,可对临界点(hc,αc)附近的时间、空间两个慢变量的缓变行为进行非线性分析。In order to further explore the influence of the expected speed and average speed of the adjacent and next-adjacent vehicles ahead on the traffic flow, nonlinear analysis can be carried out on the slow-varying behavior of two slow variables in time and space near the critical point (hc , αc ).
通过非线性分析,得到λ=0.3,γ=0.5,q=0.2时不同β、λ=0.3,β=0.2,q=0.2时不同γ及λ=0.3,γ=0.5,β=0.2时不同p,q关系三种情况下的传播速度c以及临界灵敏度αc,如表1、表2以及表3所示。Through nonlinear analysis, it is obtained that when λ=0.3, γ=0.5, q=0.2, β is different, when λ=0.3, β=0.2, q=0.2, γ and λ=0.3, γ=0.5, and β=0.2 are different when p is different , q relation propagation velocity c and critical sensitivity αc in three cases, as shown in Table 1, Table 2 and Table 3.
从三个表中可以看出,在控制其他参数不变时,无论是β的增加、γ的增加,还是q的增加,c和αc的值都逐渐降低,表明稳定流量的性能得到了提高。但是,相较于β增加时c和αc的显著降低,γ的增加及q的增加仅会使c和αc小幅度降低,能够说明驾驶员对次邻近车预期速度信息关注度的提高、对邻近、次邻近车辆平均速度信息关注度的提高给交通流稳定性带来的提升作用不大。It can be seen from the three tables that when controlling other parameters unchanged, the values of c and αc gradually decrease whether it is an increase of β, an increase of γ, or an increase of q, indicating that the performance of stable flow has been improved. . However, compared with the significant decrease of c and αc when β increases, the increase of γ and the increase of q will only reduce c and αc to a small extent, which can indicate that the driver's attention to the expected speed information of the next adjacent car increases, The improvement of the attention to the average speed information of adjacent and sub-adjacent vehicles has little effect on the improvement of traffic flow stability.
表1Table 1
λ=0.3,γ=0.5,p=0.8,q=0.2时不同β下的传播速度c以及临界灵敏度αcPropagation velocity c and critical sensitivity αc under different β when λ=0.3, γ=0.5, p=0.8, q=0.2


表2Table 2
λ=0.3,β=0.2,p=0.8,q=0.2时不同γ下的传播速度c以及临界灵敏度αcPropagation velocity c and critical sensitivity αc at differentγ when λ=0.3, β=0.2, p=0.8, q=0.2

表3table 3
λ=0.3,γ=0.5,β=0.2时不同p,q关系下的传播速度c以及临界灵敏度αcPropagation velocity c and critical sensitivity αc under different p, q relationships when λ=0.3, γ=0.5, β=0.2

下面通过数值分析的方式,深化上述模型理论分析的结果,并结合信号交叉口车辆启动及制动场景的数值仿真结果对模型交通流特性及节油减排效益进行说明。In the following, the results of the theoretical analysis of the above model are deepened by means of numerical analysis, and combined with the numerical simulation results of vehicle starting and braking scenarios at signalized intersections, the traffic flow characteristics and fuel-saving and emission-reduction benefits of the model are described.
设定如下周期边界条件:道路长度L=1500m,总车辆数N=100,α=0.6,λ=0.3。The following periodic boundary conditions are set: road length L=1500m, total number of vehicles N=100, α=0.6, λ=0.3.
图6至图9给出了t=2700s后密度波的时空演化情况,密度波随时间向后传播,右侧图例代表车头间距的大小。图6至图9中的参数未能满足稳定性条件,初始小扰动发生后,交通流由最初的稳定流状态过渡到非稳定流状态,并出现走走停停、交通拥堵现象。随着β的增大,密度波时空演化曲面图中密度波的振幅减小,交通流的稳定性变强。特别地,β=0.4,γ=0.5,q=0.2时,满足稳定性条件。当初始小扰动消失时,密度波随之消失,车头间距大致相等,曲面图几乎为一个平面,交通流仍保持稳定状态。Figures 6 to 9 show the temporal and spatial evolution of the density wave after t=2700s. The density wave propagates backward with time, and the legend on the right represents the size of the head distance. The parameters in Figures 6 to 9 fail to meet the stability conditions. After the initial small disturbance occurs, the traffic flow transitions from the initial steady flow state to the non-steady flow state, and stop-and-go and traffic congestion occur. With the increase of β, the amplitude of the density wave in the surface graph of the density wave's spatiotemporal evolution decreases, and the stability of the traffic flow becomes stronger. In particular, when β=0.4, γ=0.5, and q=0.2, the stability condition is satisfied. When the initial small disturbance disappears, the density wave disappears along with it, the head-to-head distance is roughly equal, the surface graph is almost a plane, and the traffic flow remains stable.
图10至图13给出了t=2700s后不同条件下车辆速度的变化情况,右侧图例代表速度的大小。图10至图13中的参数在不满足稳定性条件下,随着时间的变化,初始小扰动使得交通流变为非稳定流状态,车辆速度反复变化。从图中可以看出,FVD模型车辆速度较为极端,二次优化后的跟驰模型能够较好的解决FVD模型存在的问题。且速度变化越来越小,车辆能够以一个平稳的速度前进,显著提高了交通流稳定性。当β=0.4,γ=0.5,q=0.2时,满足稳定性条件。当初始小扰动消失时,速度变化随之消失,速度变化图为单种颜色,交通流保持稳定状态。Figures 10 to 13 show the changes in vehicle speed under different conditions after t=2700s, and the legend on the right represents the magnitude of the speed. When the parameters in Fig. 10 to Fig. 13 do not satisfy the stability condition, with the change of time, the initial small disturbance makes the traffic flow into an unsteady flow state, and the vehicle speed changes repeatedly. It can be seen from the figure that the vehicle speed of the FVD model is relatively extreme, and the car-following model after the secondary optimization can better solve the problems existing in the FVD model. And the speed change is getting smaller and smaller, the vehicle can move forward at a stable speed, which significantly improves the traffic flow stability. When β=0.4, γ=0.5, q=0.2, the stability condition is satisfied. When the initial small disturbance disappears, the speed change disappears with it, the speed change graph is a single color, and the traffic flow remains stable.
从图14可以看出,FVD模型车头间距分布的振幅要比不同β下模型的振幅波动大,这能够充分表明,通过引入前方邻近、次邻近车辆的预期速度及平均速度信息能够提高交通流的稳定性。此外,车头间距的波动随着β的增加而明显减小,这意味着如果驾驶员能充分考虑前方邻近、次邻近车辆的预期速度信息,交通流将变得更加稳定。特别的,当β=0.4时,由于满足稳定性条件,交通流将由非稳定状态变为稳定状态,车辆走走停停、加减速的现象消失。It can be seen from Fig. 14 that the amplitude of the head-to-head distance distribution of the FVD model fluctuates more than that of the models under different β. stability. In addition, the fluctuation of the head-to-head distance decreases significantly with the increase of β, which means that the traffic flow will become more stable if the driver can fully consider the expected speed information of the neighboring and next-neighboring vehicles ahead. In particular, when β=0.4, since the stability condition is satisfied, the traffic flow will change from an unstable state to a stable state, and the phenomenon of stop-and-go, acceleration and deceleration disappears.
由图15可以看出,经过足够长的时间,交通流状态几乎稳定,能够清晰地观察到车辆运动的迟滞环。迟滞环的大小能够反映交通流的稳定性,较大的迟滞环代表交通流稳定性较差。从图14可以看出,FVD模型的迟滞环最大,交通流稳定性最差,可能会造成严重的交通拥堵,且出现了不符合实际交通状况的负速度。相较于FVD模型,无论β大小,模型的迟滞环均较小,能够克服负速度的不足,对交通流的稳定起到积极作用。β的增大会使迟滞环进一步的减小,使得交通流更加稳定。特别地,当β=0.4时,满足稳定性条件,迟滞环收缩到最优速度曲线上的H点,交通流达到稳定状态。It can be seen from Figure 15 that after a long enough time, the traffic flow state is almost stable, and the hysteresis loop of vehicle motion can be clearly observed. The size of the hysteresis loop can reflect the stability of the traffic flow, and a larger hysteresis loop represents a poorer traffic flow stability. It can be seen from Figure 14 that the hysteresis loop of the FVD model is the largest, and the traffic flow stability is the worst, which may cause serious traffic congestion and negative speeds that do not conform to the actual traffic conditions. Compared with the FVD model, regardless of the size of β, the hysteresis loop of the model is smaller, which can overcome the deficiency of negative speed and play a positive role in the stability of traffic flow. The increase of β will further reduce the hysteresis loop, making the traffic flow more stable. In particular, when β=0.4, the stability condition is satisfied, the hysteresis loop shrinks to point H on the optimal speed curve, and the traffic flow reaches a steady state.
图16和图17给出了经过足够长时间后,β=0.2/0.3时不同γ下模型的车头间距分布。从两图中可以看出,随着γ的增大,车头间距的波动情况有一定的减小,但减小幅度不明显。图18和图19给出了β=0.2/0.3时不同γ下模型的速度-车头间距轨迹。整体上,随着γ的增大,迟滞环呈减小趋势,但减小趋势不明显。此外,横向对比图16至图19可以看出,β=0.3时车头间距的波动、迟滞环要小于β=0.2的情况,能够进一步说明β大小变化对交通流稳定性的影响要大于γ的变化。因此,数值仿真的结果与理论分析结果相吻合。Figure 16 and Figure 17 show the head-to-head spacing distribution of the models under different γ when β=0.2/0.3 after a sufficient time. It can be seen from the two figures that with the increase of γ, the fluctuation of the head spacing decreases to a certain extent, but the decrease is not obvious. Figures 18 and 19 show the velocity-head distance trajectories of the models for different γ when β=0.2/0.3. On the whole, with the increase of γ, the hysteresis loop shows a decreasing trend, but the decreasing trend is not obvious. In addition, it can be seen from the horizontal comparison of Fig. 16 to Fig. 19 that when β=0.3, the fluctuation of the head-to-head distance and the hysteresis loop are smaller than that of β=0.2, which can further illustrate that the change of the size of β has a greater impact on the traffic flow stability than the change of γ. . Therefore, the numerical simulation results are in good agreement with the theoretical analysis results.
针对信号灯由红转绿情况下模型车辆的启动情况进行研究,并分析模型的交通流特性。仿真基本参数设置如下:The starting situation of the model vehicle is studied when the signal light changes from red to green, and the traffic flow characteristics of the model are analyzed. The basic parameters of the simulation are set as follows:
α=0.41,λ=0.2,Vmax=15m/s,Vx=6.75m/s,Vy=7.91m/s,C1=0.13m-1,C2=1.57m-1,lc=5mα=0.41, λ=0.2,Vmax =15m/s,Vx =6.75m/s,Vy =7.91m/s,C1 =0.13m-1 ,C2 =1.57m-1 , lc= 5m
Vfree=14.66m/s,β=0.2,γ=0.5,p=0.8,q=0.2,车辆数N=15。Vfree = 14.66 m/s, β = 0.2, γ = 0.5, p = 0.8, q = 0.2, and the number of vehicles N = 15.
对车辆初始参数进行设置:车辆初始位置xn(0)=-(n-1)d,d=6.5m,车辆初始速度为0,即vn(0)=0。选用FVD模型进行对比,参数设置与上述设置相同。The initial parameters of the vehicle are set: the initial position of the vehicle xn (0)=-(n-1)d, d=6.5m, and the initial speed of the vehicle is 0, that is, vn (0)=0. The FVD model is selected for comparison, and the parameter settings are the same as the above settings.
对图20和图21进行分析,FVD模型中第十五辆车在22.7s启动,二次优化后的跟驰模型中第十五辆车在18.5s启动,模型中车辆具有更快的启动速度,能够减少启动延误,提高启动效率。这在一定程度上符合实际驾驶员的驾驶心理及驾驶行为:已知前方车辆打算启动时,驾驶员有更强的欲望启动车辆前进。Analysis of Figure 20 and Figure 21 shows that the fifteenth vehicle in the FVD model starts at 22.7s, and the fifteenth vehicle starts at 18.5s in the second-optimized car-following model. The vehicle in the model has a faster starting speed. , which can reduce startup delay and improve startup efficiency. This is in line with the driving psychology and driving behavior of the actual driver to a certain extent: when it is known that the vehicle ahead is about to start, the driver has a stronger desire to start the vehicle forward.
综合分析图20至图23,驾驶员在启动过程中(当速度大于0,加速度小于0.5m/s2时车辆达到较稳定速度,完成启动过程),二次优化后的跟驰模型加速度要明显低于FVD模型,二次优化后的跟驰模型中车辆能够以更平滑的加速度完成此过程,加速度的最大值低于3m/s2。对车辆完成启动过程的时间进行分析,FVD模型中第十五辆车完成启动过程的时间为31.8s,二次优化后的跟驰模型中第十五辆车完成启动过程的时间为29.7s,FVD模型启动过程耗费的时间为9.1s,二次优化后的跟驰模型启动过程耗费的时间为11.2s,二次优化后的跟驰模型耗费的启动时间更长,但能够更早完成启动过程,具有更加平滑的启动过程。Comprehensive analysis of Fig. 20 to Fig. 23 shows that during the start-up process of the driver (when the speed is greater than 0 and the acceleration is less than 0.5m/s2 , the vehicle reaches a relatively stable speed and the start-up process is completed), the acceleration of the car-following model after secondary optimization should be obvious. Compared with the FVD model, the vehicle can complete this process with a smoother acceleration in the quadratic optimized car-following model, and the maximum value of the acceleration is lower than 3m/s2 . By analyzing the time for the vehicle to complete the start-up process, the time for the fifteenth vehicle to complete the start-up process in the FVD model is 31.8s, and the time for the fifteenth vehicle to complete the start-up process in the car-following model after secondary optimization is 29.7s. The start-up time of the FVD model is 9.1s, the start-up time of the car-following model after secondary optimization is 11.2s, and the start-up time of the car-following model after secondary optimization is longer, but the start-up process can be completed earlier , with a smoother startup process.
为分析二次优化后的模型在油耗及排放方面的特性,可选用VT-Micro模型进行计算,VT-Micro模型是根据速度以及加速度特征拟合得到的,能够较为准确的反映油耗及排放情况。In order to analyze the fuel consumption and emission characteristics of the model after secondary optimization, the VT-Micro model can be used for calculation. The VT-Micro model is obtained by fitting according to the characteristics of speed and acceleration, which can more accurately reflect the fuel consumption and emissions.
FVD模型以及二次优化后的跟驰模型中驾驶员启动过程(第三辆车至第十五辆车)产生的平均油耗及排放如表4所示,从表4中可以看出,在驾驶员的启动过程中,模型能够在一定程度上减少驾驶员产生的油耗及排放,约5%。其原因在于,模型能够减少启动延误、提高启动效率、具有更平滑的启动过程。The average fuel consumption and emissions generated by the driver's starting process (the third vehicle to the fifteenth vehicle) in the FVD model and the car-following model after secondary optimization are shown in Table 4. It can be seen from Table 4 that when driving During the start-up process of the driver, the model can reduce the fuel consumption and emissions generated by the driver to a certain extent, about 5%. The reason is that the model can reduce startup delay, improve startup efficiency, and have a smoother startup process.
表4Table 4
FVD模型及二次优化后的跟驰模型启动过程产生的平均油耗及排放表Average fuel consumption and emission table of FVD model and car-following model after secondary optimization

针对信号灯由绿转红情况下模型车辆制动情况进行研究,并检验二次优化后的跟驰模型的相关特性,仿真基本参数设置与车辆启动场景相同,但假设道路600m处有红灯。车辆初始参数设置为:车辆初始位置xn(0)=-(n-1)d,d=40m,车辆初始速度vn(0)=14.66m/s。选用FVD模型进行对比,参数设置与上述设置相同。The braking situation of the model vehicle is studied when the signal light turns from green to red, and the relevant characteristics of the car-following model after the secondary optimization are tested. The basic parameter settings of the simulation are the same as the vehicle startup scene, but it is assumed that there is a red light at 600m on the road. The initial parameters of the vehicle are set as: initial vehicle position xn (0)=-(n-1)d, d=40m, and initial vehicle speed vn (0)=14.66m/s. The FVD model is selected for comparison, and the parameter settings are the same as the above settings.
从图24和图25可以得出,FVD模型中第十五辆车在86.9s开始减速,在96.4s结束制动,共耗费9.5s;二次优化后的跟驰模型中第十五辆车在82.8s开始减速,在94.9s结束制动,共耗费12.1s,二次优化后的跟驰模型更早开始制动,但需要耗费更多的时间来完成制动过程。这在一定程度上符合实际驾驶员的驾驶心理及驾驶行为:已知前方车辆打算制动停车时,驾驶员更容易采取减速操作,但仍要逐渐到达信号交叉口处停车。然而,两模型整体的制动结束时间差异很小,取决于第一辆车制动开始时间。From Figure 24 and Figure 25, it can be concluded that the fifteenth vehicle in the FVD model starts to decelerate at 86.9s and finishes braking at 96.4s, which takes 9.5s in total; the fifteenth vehicle in the car-following model after secondary optimization The deceleration starts at 82.8s and the braking ends at 94.9s, which takes a total of 12.1s. The car-following model after the second optimization starts braking earlier, but it takes more time to complete the braking process. To a certain extent, this is in line with the driving psychology and driving behavior of the actual driver: when it is known that the vehicle ahead intends to brake and stop, the driver is more likely to take a deceleration operation, but still gradually arrive at the signalized intersection to stop. However, the overall difference in braking end time between the two models is small and depends on the first vehicle braking start time.
计算从第一辆车制动开始,至最后一辆车制动结束时,车队中第三辆车至第十五辆车的平均油耗及排放情况可以发现,虽然二次优化后的跟驰模型中每一辆车的制动过程更长,但油耗和排放并没有提高,而是降低了2%~3%。结合图26和图27能够充分解释此结果:二次优化后的跟驰模型在制动过程中采取更平滑的减速度,减速度的最小值基本上均小于-3m/s2,FVD模型则采取更小的减速度,减速度的最小值接近-4m/s2,模型具有更平滑的制动过程。The average fuel consumption and emissions of the third to fifteenth vehicles in the fleet can be found from the start of the braking of the first vehicle to the end of the braking of the last vehicle, although the car following model after the second optimization can be found. The braking process of each vehicle is longer, but the fuel consumption and emissions are not improved, but reduced by 2% to 3%. Combining Figure 26 and Figure 27 can fully explain this result: the car-following model after the quadratic optimization adopts a smoother deceleration during the braking process, and the minimum value of the deceleration is basically less than -3m/s2 , and the FVD model is Taking a smaller deceleration, the minimum value of the deceleration is close to -4m/s2 , the model has a smoother braking process.
本实施方式中通过线性稳定性分析及非线性分析得到了二次优化后的跟驰模型的稳定性条件及mKdV方程,并对二次优化后的跟驰模型的交通流稳定性进行理论分析。通过数值仿真对理论分析的结果进行深化,并对信号交叉口车辆启动、制动两种场景的交通流特性及节油减排效益进行分析,得到如下结论:In this embodiment, the stability conditions and the mKdV equation of the car following model after quadratic optimization are obtained through linear stability analysis and nonlinear analysis, and the traffic flow stability of the car following model after quadratic optimization is theoretically analyzed. The results of the theoretical analysis are deepened through numerical simulation, and the traffic flow characteristics and the benefits of fuel saving and emission reduction in the two scenarios of vehicle starting and braking at signalized intersections are analyzed, and the following conclusions are obtained:
(1)二次优化后的跟驰模型能够有效提高交通流的稳定性,预期速度信息作用强度和对交通流稳定性产生较大影响,预期速度信息作用关系产生的影响小;(1) The car-following model after the secondary optimization can effectively improve the stability of the traffic flow, the expected speed information will have a greater impact on the stability of the traffic flow, and the expected speed information will have a small impact;
(2)二次优化后的跟驰模型中平均速度信息对交通流稳定性的贡献较小,但能在提供预期速度信息的基础上,进一步提高交通流的稳定性;(2) The contribution of the average speed information to the traffic flow stability in the car following model after secondary optimization is small, but it can further improve the stability of the traffic flow on the basis of providing the expected speed information;
(3)二次优化后的跟驰模型车辆启动延误小,能更早完成启动过程,提高启动效率,在制动场景下能够更早开始制动,平滑制动过程,且能够在一定程度上减少油耗及排放。(3) After the secondary optimization, the car-following model vehicle has a small start-up delay, can complete the start-up process earlier, improve the start-up efficiency, and can start braking earlier in the braking scenario, smooth the braking process, and to a certain extent Reduce fuel consumption and emissions.
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。Although the invention has been described herein with reference to specific embodiments, it should be understood that these embodiments are merely illustrative of the principles and applications of the invention. It should therefore be understood that many modifications may be made to the exemplary embodiments and other arrangements can be devised without departing from the spirit and scope of the invention as defined by the appended claims. It should be understood that the features described in the various dependent claims and herein may be combined in different ways than are described in the original claims. It will also be appreciated that features described in connection with a single embodiment may be used in other described embodiments.
Claims (4)
Translated fromChinese





Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111407065.4ACN114120688B (en) | 2021-11-24 | 2021-11-24 | A method for establishing a car following model considering the information of the vehicle ahead in the V2V environment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111407065.4ACN114120688B (en) | 2021-11-24 | 2021-11-24 | A method for establishing a car following model considering the information of the vehicle ahead in the V2V environment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114120688A CN114120688A (en) | 2022-03-01 |
| CN114120688Btrue CN114120688B (en) | 2022-06-28 |
Family
ID=80372708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111407065.4AActiveCN114120688B (en) | 2021-11-24 | 2021-11-24 | A method for establishing a car following model considering the information of the vehicle ahead in the V2V environment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114120688B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115171414B (en)* | 2022-06-10 | 2023-07-14 | 哈尔滨工业大学重庆研究院 | A CACC car-following control system based on Frenet coordinate system |
| CN119252011A (en)* | 2023-11-09 | 2025-01-03 | 兰州交通大学 | A connected vehicle following model and traffic flow stability analysis method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015099508A (en)* | 2013-11-19 | 2015-05-28 | 東芝テック株式会社 | Vehicular passage control system and vehicular passage control program |
| CN105448080A (en)* | 2015-11-16 | 2016-03-30 | 北京理工大学 | Modeling method considering influence of sub-adjacent vehicles to traffic flow time lag car-following model stability |
| JP2020100179A (en)* | 2018-12-20 | 2020-07-02 | トヨタ自動車株式会社 | Car manufacturing method |
| KR20200081526A (en)* | 2018-12-18 | 2020-07-08 | 현대자동차주식회사 | Autonomous vehicle and driving control method using the same |
- 2021
- 2021-11-24CNCN202111407065.4Apatent/CN114120688B/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015099508A (en)* | 2013-11-19 | 2015-05-28 | 東芝テック株式会社 | Vehicular passage control system and vehicular passage control program |
| CN105448080A (en)* | 2015-11-16 | 2016-03-30 | 北京理工大学 | Modeling method considering influence of sub-adjacent vehicles to traffic flow time lag car-following model stability |
| KR20200081526A (en)* | 2018-12-18 | 2020-07-08 | 현대자동차주식회사 | Autonomous vehicle and driving control method using the same |
| JP2020100179A (en)* | 2018-12-20 | 2020-07-02 | トヨタ自動車株式会社 | Car manufacturing method |
Non-Patent Citations (3)
| Title |
|---|
| 交通流双车动力学模型与数值仿真;彭光含 等;《系统仿真学报》;20080130;第20卷(第2期);272-275,292* |
| 双车跟驰模型稳定性及非线性分析;彭光含;《四川大学学报(自然科学版)》;20090728;第46卷(第4期);1057-1064* |
| 考虑车辆加速度和次邻近车辆速度差的跟驰模型及仿真研究;陈刚 等;《科学技术与工程》;20120528;第12卷(第15期);3672-3674,3684* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114120688A (en) | 2022-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111081065B (en) | Intelligent vehicle cooperative lane change decision-making model under mixed traffic conditions | |
| CN114120688B (en) | A method for establishing a car following model considering the information of the vehicle ahead in the V2V environment | |
| CN110362910A (en) | Automatic driving vehicle lane-change conflict coordination method for establishing model based on game theory | |
| CN110930697B (en) | Rule-based intelligent networked vehicle cooperative convergence control method | |
| CN114023108B (en) | A mixed traffic flow lane change model and lane change simulation method | |
| WO2022121249A1 (en) | Method and apparatus for vehicles on branch road to enter main road, and electronic device and storage medium | |
| CN114495547A (en) | A coordinated traffic strategy at signalized intersections for autonomous vehicles | |
| CN114771522A (en) | Method for constructing man-machine hybrid driving traffic flow vehicle lane change model | |
| CN115497315B (en) | A dynamic bus lane energy-saving optimization control method in a vehicle-road collaborative environment | |
| CN113823076B (en) | Instant-stop and instant-walking road section blockage relieving method based on networked vehicle coordination control | |
| Zhang et al. | Cooperative platoon forming strategy for connected autonomous vehicles in mixed traffic flow | |
| CN118411838B (en) | A method for coordinated time-space right-of-way priority control of emergency vehicles in a hybrid network environment | |
| CN111243304A (en) | Control method of ACC vehicle at V2I signal control intersection | |
| CN114987538A (en) | Collaborative lane changing method considering multi-objective optimization in internet automatic driving environment | |
| CN118747950A (en) | Coordinated control method for left-turn intersection with road displacement in intelligent connected mixed traffic environment | |
| CN115140093A (en) | Real-time trajectory planning method | |
| CN116279475B (en) | Cooperative control method for consistency of operation speeds of network-connected automatic driving vehicle queues | |
| Zhao et al. | Two-lane mixed traffic flow model considering lane changing | |
| CN108182812A (en) | Urban road intersection ecology driving behavior optimization method based on intensified learning | |
| CN114475569A (en) | Hybrid electric vehicle energy management method based on traffic information and deep reinforcement learning | |
| CN114861391A (en) | Microcosmic simulation method for cooperative self-adaptive cruise control vehicle | |
| Shan et al. | Developing a novel dynamic bus lane control strategy with eco-driving under partially connected vehicle environment | |
| CN106494388B (en) | A kind of hybrid vehicle energy management and speed-regulating device and method | |
| Wang et al. | Driving behavior of connected autonomous vehicles in mixed traffic flow within ramp segments on freeway based on an advanced cellular automata | |
| CN116153065B (en) | Intersection traffic signal refined optimization method and device under vehicle-road cooperative environment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |