CN114088348A - Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation Errors - Google Patents
Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation ErrorsDownload PDFInfo
- Publication number
- CN114088348A CN114088348ACN202111026969.2ACN202111026969ACN114088348ACN 114088348 ACN114088348 ACN 114088348ACN 202111026969 ACN202111026969 ACN 202111026969ACN 114088348 ACN114088348 ACN 114088348A
- Authority
- CN
- China
- Prior art keywords
- reconstruction
- curvature
- slope
- value
- wavefront
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription59
- 238000005259measurementMethods0.000claimsabstractdescription11
- 239000011159matrix materialSubstances0.000claimsdescription10
- 238000004364calculation methodMethods0.000abstractdescription4
- 230000003044adaptive effectEffects0.000abstractdescription3
- 230000036039immunityEffects0.000abstractdescription2
- 238000004422calculation algorithmMethods0.000description42
- 230000004075alterationEffects0.000description9
- 238000010586diagramMethods0.000description8
- 238000005516engineering processMethods0.000description8
- 230000008569processEffects0.000description4
- 238000001514detection methodMethods0.000description3
- 238000004088simulationMethods0.000description3
- 230000003287optical effectEffects0.000description2
- 230000009286beneficial effectEffects0.000description1
- 230000008859changeEffects0.000description1
- 238000011161developmentMethods0.000description1
- 230000006872improvementEffects0.000description1
- 238000002955isolationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000012986modificationMethods0.000description1
- 238000011160researchMethods0.000description1
Images





Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M11/00—Testing of optical apparatus; Testing structures by optical methods not otherwise provided for
- G01M11/02—Testing optical properties
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing Of Optical Devices Or Fibers (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于光学测量技术领域,具体涉及一种高阶截断误差的多方向斜率和曲率混合波前重构方法。The invention belongs to the technical field of optical measurement, and in particular relates to a multi-directional slope and curvature mixed wavefront reconstruction method for high-order truncation errors.
背景技术Background technique
斜率型波前传感技术通过测量波前的斜率值(波前的一阶导数),利用重构算法计算出波前像差。哈特曼-夏克波前传感器是斜率型波前传感技术的一个典型实例,在自适应光学系统、眼科学、光学元件和系统像差检测等领域有广泛的应用。近年来,有人提出一类新的斜率和曲率混合型的波前传感技术。由于该传感技术同时测量得到波前的斜率和曲率值,相对于单一的斜率型或曲率型波前传感技术能够得到更多的波前信息,从而能够实现更高精度的波前像差检测,是高精度像差检测技术的一个发展方向。The slope-type wavefront sensing technology calculates the wavefront aberration by using the reconstruction algorithm by measuring the slope value of the wavefront (the first derivative of the wavefront). The Hartmann-Shack wavefront sensor is a typical example of slope-type wavefront sensing technology, which is widely used in adaptive optics, ophthalmology, optical components, and system aberration detection. In recent years, a new class of wavefront sensing technology with a hybrid slope and curvature has been proposed. Since the sensing technology simultaneously measures the slope and curvature of the wavefront, more wavefront information can be obtained compared to a single slope-type or curvature-type wavefront sensing technology, so that higher-precision wavefront aberration can be achieved. Detection is a development direction of high-precision aberration detection technology.
混合型波前重构算法能够利用各个子孔径内斜率、曲率以及混合曲率值 (即波前的全部一阶和二阶信息)表征的波面位相信息,包括扭转曲率项。目前有少量关于混合型波前重构算法的研究报道。2011年,Barwick(Opt Commun,2011,284(8):2099-2108)提出基于最小二乘的混合型区域波前重构方法,利用斜率、拉普拉斯曲率、扭转曲率信息,提高重构精度,但孤立地利用了波前值与斜率值、波前值与曲率值的数学关系,重构精度有待提高。2017 年,M.Viegers(Opt.Express,2017,25(10):11514-11529)提出了一种基于样条的像差重建方法,综合利用一阶和二阶矩来重构波前,但该方法对高斯噪声很敏感,且使用迭代算法,计算量大,不能实时运行。2018年,Fan Feng(Opt. Eng.,2018,57(7):074106-1-074106-10)介绍了一种改进的方案,将离焦纳入基于矩的方法中,可以使用一阶和二阶原点矩来重构波前,但对中高阶像差的幅值限制更为苛刻,并且阶数越高,能探测幅值的范围越小。The hybrid wavefront reconstruction algorithm can utilize the wavefront phase information, including the torsional curvature term, characterized by the slope, curvature, and hybrid curvature values within each subaperture (ie, all first- and second-order information of the wavefront). There are few research reports on hybrid wavefront reconstruction algorithms. In 2011, Barwick (Opt Commun, 2011, 284(8): 2099-2108) proposed a hybrid regional wavefront reconstruction method based on least squares, using the information of slope, Laplace curvature and torsional curvature to improve the reconstruction. However, the mathematical relationship between the wavefront value and the slope value, and the wavefront value and the curvature value is used in isolation, and the reconstruction accuracy needs to be improved. In 2017, M.Viegers (Opt.Express, 2017, 25(10):11514-11529) proposed a spline-based aberration reconstruction method, which comprehensively used the first-order and second-order moments to reconstruct the wavefront, but This method is very sensitive to Gaussian noise and uses an iterative algorithm, which requires a large amount of computation and cannot be run in real time. In 2018, Fan Feng (Opt. Eng., 2018, 57(7): 074106-1-074106-10) introduced an improved scheme to incorporate defocusing into moment-based methods, which can use first-order and second-order The wavefront can be reconstructed using the order origin moment, but the amplitude limit of medium and high-order aberrations is more severe, and the higher the order, the smaller the range of amplitudes that can be detected.
以上的方法虽然都利用了波前的一阶和二阶导数信息,但有截断误差较大或抗噪性弱的问题,而在实际情况里测量噪声是不可避免的,所以需要一种新型混合波前重构方法来提高重构精度和抗噪性。Although the above methods all use the first and second derivative information of the wavefront, they have the problem of large truncation error or weak anti-noise, and measurement noise is unavoidable in practical situations, so a new hybrid hybrid is needed. Wavefront reconstruction method to improve reconstruction accuracy and noise immunity.
发明内容SUMMARY OF THE INVENTION
有鉴于此,本发明提供了一种高阶截断误差的多方向斜率和曲率混合波前重构方法,能够提高波前重构精度和抗噪能力,从而实现高阶像差的精密测量。In view of this, the present invention provides a multi-directional slope and curvature hybrid wavefront reconstruction method for high-order truncation errors, which can improve wavefront reconstruction accuracy and anti-noise capability, thereby realizing precise measurement of high-order aberrations.
实现本发明的技术方案如下:The technical scheme that realizes the present invention is as follows:
高阶截断误差的多方向斜率和曲率混合波前重构方法,包括以下步骤:Multi-directional slope and curvature hybrid wavefront reconstruction method for higher-order truncation errors, including the following steps:
步骤一、基于区域法Southwell模型,在每个网格点加入0°到180°之间除水平和竖直的任意方向的斜率和曲率测量值;
步骤二、利用0°到180°之间除水平和竖直的任意方向的波前值、斜率值和混合曲率值三者关系构造积分方程;Step 2: Construct an integral equation by using the relationship between the wavefront value, the slope value and the mixed curvature value in any direction between 0° and 180° divided by the horizontal and vertical directions;
步骤三、利用泰勒展开得到关于所述积分方程系数的解;
步骤四、将步骤三中求解出的系数代入步骤二中的积分方程,即可得到重构方程,并用矩阵表示为AW=H;Step 4. Substitute the coefficients solved in
其中,A为2(N-1)2×N2的二维的系数矩阵,W为待测波前值,大小为 N2×1的列向量,H为斜率曲率值,大小为2(N-1)2×1的列向量;Among them, A is a two-dimensional coefficient matrix of 2(N-1)2 ×N2 , W is the wavefront value to be measured, and the size is a column vector of N2 ×1, H is the slope curvature value, and the size is 2(N -1)2 × 1 column vector;
步骤五、计算A和H的值,即可复原待测波前值为W=(ATA)+ATH;Step 5. Calculate the values of A and H, and then restore the wavefront value to be measured as W=(AT A)+ AT H;
其中,AT是A的转置矩阵,(ATA)+为ATA的广义逆矩阵。where AT is the transpose matrix of A, and (AT A)+ is the generalized inverse of AT A.
进一步地,步骤一中在每个网格点加入0°到180°之间除水平和竖直的任意方向的斜率和曲率测量值为:Further, in


其中,重构区域为方形,且被分割为N×N个宽度为h的子孔径,用(t,k)表示重构区域内第t行、第k列子孔径的中心位置,t=1,2,…,N,k=1,2,…,N,St,k是任意方向点(t,k)处的斜率值,Ct,k是任意方向点(t,k)处的曲率值,




进一步地,步骤二中,0°到180°之间除水平和竖直的任意方向的波前值、斜率值和混合曲率值三者关系表示为:Further, in
Af1+Bf2=h(Ef1′+Ff2′)+h2(Gf1″+Hf2″)Af1 +Bf2 =h(Ef1 ′+Ff2 ′)+h2 (Gf1 ″+Hf2 ″)
其中,f1和f2分别是在点1和点2的函数值,f1′和f2′分别是在点1和点2 的一阶导数值,f1″和f2″分别是在点1和点2的二阶导数值,A、B、E、F、G 和H为系数,点1和点2为重构区域内任意方向相邻两重构点位置。Among them, f1 and f2 are the function values at
进一步地,步骤四中,45°和135°方向上的重构方程表示为:Further, in step 4, the reconstruction equations in the 45° and 135° directions are expressed as:


其中,用(i,j)表示重构区域内第i行、第j列子孔径的中心位置, i=1,2,…,(N-1),j=1,2,…,(N-1),Wi,j表示点(i,j)处的波前值,Wi+1,j+1表示点(i+1,j+1)处的波前值,



进一步地,将水平和竖直方向的重构方程以及步骤四中求出重构方程联立方程组,构造多方向混合重构方程。Further, the reconstruction equations in the horizontal and vertical directions and the simultaneous equation set of reconstruction equations obtained in step 4 are used to construct multi-directional hybrid reconstruction equations.
进一步地,将水平、竖直、45°和135°方向的重构方程联立方程组表示为:Further, the simultaneous equations of reconstruction equations in the horizontal, vertical, 45° and 135° directions are expressed as:




其中,



有益效果:Beneficial effects:
1、本发明的高阶截断误差的多方向斜率和曲率混合波前重构方法,突破了传统技术仅利用x和y方向的信息进行重构,利用0°到180°之间除水平和竖直的任意方向的波前值、斜率值和混合曲率值的三者关系,通过构造截断误差更小的方程,从而达到了高阶像差精密测量的目的。1. The multi-directional slope and curvature hybrid wavefront reconstruction method of the high-order truncation error of the present invention breaks through the traditional technology that only uses the information in the x and y directions for reconstruction, and divides the horizontal and vertical directions between 0° and 180°. The relationship between the wavefront value, the slope value and the mixed curvature value of the straight arbitrary direction can be achieved by constructing an equation with a smaller truncation error, so as to achieve the purpose of precise measurement of high-order aberrations.
2、本发明采用多方向进行重构,使环路中包含更多网格点,提高了重构精度,具有较强的抗噪能力;2. The present invention adopts multi-directional reconstruction, so that the loop contains more grid points, improves reconstruction accuracy, and has strong anti-noise ability;
3、本发明的波前重构过程用最小二乘法进行求解,相对其他波前重构技术的迭代计算过程,本发明的计算量小,计算速度快,可以应用于自适应光学等实时性要求较高的应用领域。3. The wavefront reconstruction process of the present invention is solved by the least square method. Compared with the iterative calculation process of other wavefront reconstruction technologies, the present invention has a small amount of calculation and a fast calculation speed, and can be applied to real-time requirements such as adaptive optics. higher application areas.
附图说明Description of drawings
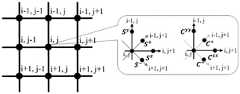
图1为45°和135°方向斜率和曲率测量值的原理示意图。Figure 1 is a schematic diagram of the principle of slope and curvature measurements in the 45° and 135° directions.
图2为本发明方法的流程图。Figure 2 is a flow chart of the method of the present invention.
图3为基于区域法Southwell模型重构的结构示意图。FIG. 3 is a schematic structural diagram of the reconstruction of the Southwell model based on the regional method.
图4为不考虑噪声情况下,本发明所述方法与传统方法波前复原重构结果对比图;(a)Barwick算法和HB1、HB2算法;(b)Pathak算法和HM1、HM2 算法;(c)HB1、HB2算法和HM1、HM2算法。Figure 4 is a comparison diagram of the wavefront restoration and reconstruction results between the method of the present invention and the traditional method without considering the noise; (a) Barwick algorithm and HB1, HB2 algorithm; (b) Pathak algorithm and HM1, HM2 algorithm; (c) ) HB1, HB2 algorithm and HM1, HM2 algorithm.
图5为考虑噪声情况下,信噪比为10时,本发明所述方法与传统方法波前复原重构结果对比图;(a)Barwick算法和HB1、HB2算法;(b)Pathak算法和HM1、HM2算法;(c)HB1、HB2算法和HM1、HM2算法。Figure 5 is a comparison diagram of the wavefront restoration and reconstruction results between the method of the present invention and the traditional method when the signal-to-noise ratio is 10 under the consideration of noise; (a) Barwick algorithm and HB1, HB2 algorithm; (b) Pathak algorithm and HM1 , HM2 algorithm; (c) HB1, HB2 algorithm and HM1, HM2 algorithm.
图6为考虑噪声情况下,信噪比为30时,本发明所述方法与传统方法波前复原重构结果对比图;(a)Barwick算法和HB1、HB2算法;(b)Pathak算法和HM1、HM2算法;(c)HB1、HB2算法和HM1、HM2算法。Figure 6 is a comparison diagram of the wavefront restoration and reconstruction results between the method of the present invention and the traditional method when the signal-to-noise ratio is 30 under the consideration of noise; (a) Barwick algorithm and HB1, HB2 algorithm; (b) Pathak algorithm and HM1 , HM2 algorithm; (c) HB1, HB2 algorithm and HM1, HM2 algorithm.
具体实施方式Detailed ways
下面结合附图并举实施例,对本发明进行详细描述。The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
图1示意性地给出了45°和135°方向的斜率和曲率的原理示意图,基于区域法Southwell模型,除了常规的水平和竖直方向的斜率和曲率值,本发明考虑了45°和135°方向的斜率和曲率值,在环路中加入额外网格点(i-1,j-1), (i+1,j-1),(i+1,j+1),和(i-1,j+1),提高重构精度。Fig. 1 schematically shows the schematic diagram of the slope and curvature in the 45° and 135° directions. Based on the Southwell model of the regional method, in addition to the conventional slope and curvature values in the horizontal and vertical directions, the present invention considers 45° and 135°. Slope and curvature values in the ° direction, with additional grid points (i-1,j-1), (i+1,j-1), (i+1,j+1), and (i) added to the loop -1,j+1) to improve the reconstruction accuracy.
结合图2,本发明的高阶截断误差的多方向斜率和曲率混合波前重构方法,具体过程为:2, the multi-directional slope and curvature hybrid wavefront reconstruction method of the high-order truncation error of the present invention, the specific process is:
步骤一、基于区域法Southwell模型,在每个网格点额外加入0°到180°之间除水平和竖直的任意方向的斜率和曲率测量值:


其中,重构区域为方形,且被分割为N×N个宽度为h的子孔径,用(t,k)表示重构区域内第t行、第k列子孔径的中心位置,t=1,2,…,N,k=1,2,…,N,St,k是任意方向点(t,k)处的斜率值,Ct,k是任意方向点(t,k)处的曲率值,




步骤二、考虑0°到180°之间除水平和竖直的任意方向的波前值、斜率值和混合曲率值三者关系构造积分方程,此积分方程截断误差为O(h5):Step 2: Construct an integral equation considering the relationship between the wavefront value, slope value and mixed curvature value in any direction between 0° and 180° except horizontal and vertical. The truncation error of this integral equation is O(h5 ):
Af1+Bf2=h(Ef1′+Ff2′)+h2(Gf1″+Hf2″)Af1 +Bf2 =h(Ef1 ′+Ff2 ′)+h2 (Gf1 ″+Hf2 ″)
其中,f1和f2分别是在点1和点2的函数值,f1′和f2′分别是在点1和点2 的一阶导数值,f1″和f2″分别是在点1和点2的二阶导数值,A、B、E、F、G 和H为系数,点1和点2为重构区域内任意方向相邻两重构点位置,重构方程的截断误差阶数越高,其值越精确,类似地,也可构造截断误差为O(h7)的积分方程,比五阶的多包涵两个斜率值,截断误差从O(h5)提高到O(h7);Among them, f1 and f2 are the function values at
步骤三、利用泰勒展开得到关于方程系数的解;
对上述表达式在点1.5处进行泰勒展开,使等式两边导数前系数相等,由此解出A、B、E、F、G和H的值,其中,点1.5为点1和2的中间位置。Perform Taylor expansion of the above expression at point 1.5, and make the coefficients before the derivatives on both sides of the equation equal, thereby solving the values of A, B, E, F, G and H, where point 1.5 is the middle of
步骤四、将系数求解后,再执行以下步骤:Step 4. After solving the coefficients, perform the following steps:
(1)将步骤三中求解出的系数代入步骤二中的积分方程,以45°和135°方向为例:(1) Substitute the coefficients solved in

(2)即可得到45°和135°方向上,截断误差为O(h5)的重构方程:(2) The reconstruction equation with the truncation error of O(h5 ) in the 45° and 135° directions can be obtained:


其中,用(i,j)表示重构区域内第i行、第j列子孔径的中心位置, i=1,2,…,(N-1),j=1,2,…,(N-1),Wi,j表示点(i,j)处的波前值,Wi+1,j+1表示点(i+1,j+1)处的波前值,



AW=HAW=H
其中,A为2(N-1)2×N2的二维的系数矩阵,W为待测波前值,大小为 N2×1的列向量,H为斜率曲率值,大小为2(N-1)2×1的列向量,类似,可构造截断误差为O(h7),45°和135°方向上的重构方程。Among them, A is a two-dimensional coefficient matrix of 2(N-1)2 ×N2 , W is the wavefront value to be measured, and the size is a column vector of N2 ×1, H is the slope curvature value, and the size is 2(N -1)2 × 1 column vector, similarly, the reconstruction equation can be constructed with truncation error O(h7 ), 45° and 135° directions.
步骤五、计算A和H值,用最小二乘法求解出待测波前值为:Step 5. Calculate the values of A and H, and use the least squares method to solve the wavefront value to be measured:
W=(ATA)+ATH;W=(AT A)+ AT H;
其中,AT是A的转置矩阵,(ATA)+为ATA的广义逆矩阵。where AT is the transpose matrix of A, and (AT A)+ is the generalized inverse of AT A.
更优地,本发明可结合x和y方向的重构方程以及步骤四中求出的0°到 180°之间除水平和竖直的任意方向的重构方程联立方程组,构造多方向混合重构方程:More preferably, the present invention can combine the reconstruction equations in the x and y directions and the reconstruction equations in any direction between 0° and 180° obtained in step 4 to divide the horizontal and vertical simultaneous equations to construct a multi-directional equation. Hybrid reconstruction equation:
以x、y、45°(对角方向)和135°方向为例:Take the x, y, 45° (diagonal) and 135° directions as examples:




其中,



如图3所示为基于区域法Southwell模型重构的结构示意图,其中黑色圆点表示波前重构点的位置,它与十字表示的斜率和曲率值测量点的参考位置重合,圆环表示相邻两波前重构点的中间位置。Figure 3 is a schematic diagram of the reconstructed structure of the Southwell model based on the regional method, in which the black circle represents the position of the wavefront reconstruction point, which coincides with the reference position of the slope and curvature value measurement points represented by the cross, and the circle represents the phase The middle position of the reconstructed point between two adjacent wavefronts.
如图4所示为不考虑噪声情况下,本发明所述方法与传统方法波前复原重构结果对比图,(a)Barwick算法和HB1、HB2算法(b)Pathak算法和HM1、 HM2算法(c)HB1、HB2算法和HM1、HM2算法,其中,HB1和HB2为本发明的任意方向(以45°和135°为例)混合型重构方法,HB1截断误差为O(h5), HB2截断误差为O(h7),HM1和HM2为本发明的多方向混合型重构方法,HM1 截断误差为O(h5),HM2截断误差为O(h7),Barwick为现有的混合型重构方法,Pathak为多方向斜率型重构方法,从图4的仿真结果可以看到,相较于现有的混合型重构方法,本发明的高阶截断误差的多方向斜率和曲率混合波前重构方法的相对重构误差值降低了约四个数量级,且通过多方向重构,在给定环路中结合更多数量的网格点,可以在一定程度上提高重构精度。Figure 4 is a comparison diagram of the wavefront restoration and reconstruction results between the method of the present invention and the traditional method without considering the noise, (a) Barwick algorithm and HB1, HB2 algorithm (b) Pathak algorithm and HM1, HM2 algorithm ( c) HB1 and HB2 algorithms and HM1 and HM2 algorithms, wherein HB1 and HB2 are hybrid reconstruction methods in any direction (taking 45° and 135° as an example) of the present invention, the truncation error of HB1 is O(h5 ), and HB2 The truncation error is O(h7 ), HM1 and HM2 are multi-directional hybrid reconstruction methods of the present invention, the truncation error of HM1 is O(h5 ), the truncation error of HM2 is O(h7 ), and Barwick is the existing hybrid reconstruction method. Compared with the existing hybrid reconstruction method, Pathak is a multi-directional slope reconstruction method. It can be seen from the simulation results in FIG. The relative reconstruction error value of the hybrid wavefront reconstruction method is reduced by about four orders of magnitude, and the reconstruction accuracy can be improved to a certain extent by combining a larger number of grid points in a given loop through multi-directional reconstruction. .
如图5所示为考虑噪声情况下,信噪比差为10时,本发明所述方法与传统方法波前复原重构结果对比图,(a)Barwick算法和HB1、HB2算法(b) Pathak算法和HM1、HM2算法(c)HB1、HB2算法和HM1、HM2算法,从图5的仿真结果可以看到,在存在测量噪声情况下,本发明的方法相比现有算法的优势,在于对高阶像差有更小的相对重构误差,以及具有较强的抗噪能力,且本发明的多方向混合型重构方法HM1、HM2比混合型重构方法HB1、 HB2有更小的相对重构误差。Figure 5 shows the comparison of the wavefront restoration and reconstruction results of the method of the present invention and the traditional method when the signal-to-noise ratio difference is 10 considering the noise, (a) Barwick algorithm and HB1, HB2 algorithm (b) Pathak Algorithms and HM1, HM2 Algorithms (c) HB1, HB2 Algorithms and HM1, HM2 Algorithms, it can be seen from the simulation results in FIG. Higher-order aberrations have smaller relative reconstruction errors and stronger anti-noise capabilities, and the multi-directional hybrid reconstruction methods HM1 and HM2 of the present invention have smaller relative reconstruction methods than the hybrid reconstruction methods HB1 and HB2. reconstruction error.
如图6所示为考虑噪声情况下,信噪比较好为30时,本发明所述方法与传统方法波前复原重构结果对比图,(a)Barwick算法和HB1、HB2算法(b) Pathak算法和HM1、HM2算法(c)HB1、HB2算法和HM1、HM2算法,从图6的仿真结果可以看到,随着信噪比从10增加到30时,Barwick算法和 Pathak算法的相对重构误差并没有明显的变化,而本发明的HB1、HB2、HM1和HM2相对重构误差都有明显的减小,且具有较强的抗噪能力。Figure 6 shows the comparison of the wavefront restoration and reconstruction results between the method of the present invention and the traditional method when the signal-to-noise ratio is preferably 30 considering the noise, (a) Barwick algorithm and HB1, HB2 algorithm (b) Pathak algorithm and HM1, HM2 algorithm (c) HB1, HB2 algorithm and HM1, HM2 algorithm, it can be seen from the simulation results in Figure 6 that when the signal-to-noise ratio increases from 10 to 30, the relative weight of Barwick algorithm and Pathak algorithm is relatively heavy. The reconstruction error has no obvious change, while the relative reconstruction errors of HB1, HB2, HM1 and HM2 of the present invention are obviously reduced, and have strong anti-noise ability.
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。To sum up, the above are only preferred embodiments of the present invention, and are not intended to limit the protection scope of the present invention. Any modification, equivalent replacement, improvement, etc. made within the spirit and principle of the present invention shall be included within the protection scope of the present invention.
Claims (6)





















Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111026969.2ACN114088348B (en) | 2021-09-02 | 2021-09-02 | Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation Errors |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111026969.2ACN114088348B (en) | 2021-09-02 | 2021-09-02 | Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation Errors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114088348Atrue CN114088348A (en) | 2022-02-25 |
| CN114088348B CN114088348B (en) | 2022-09-09 |
Family
ID=80296331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111026969.2AActiveCN114088348B (en) | 2021-09-02 | 2021-09-02 | Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation Errors |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114088348B (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001036471A (en)* | 1999-07-15 | 2001-02-09 | Mitsubishi Electric Corp | Wavefront error detection device and wavefront error detection method |
| US20070222948A1 (en)* | 2006-03-23 | 2007-09-27 | Visx, Incorporated | Systems and methods for wavefront reconstruction for aperture with arbitrary shape |
| CN104239740A (en)* | 2014-09-26 | 2014-12-24 | 中国科学院光电技术研究所 | Mode wavefront restoration method based on Hartmann wavefront sensor |
| CN106969844A (en)* | 2017-01-06 | 2017-07-21 | 北京理工大学 | Slope and curvature signal extracting method based on sub-aperture wavefront Modulation and Amplitude Modulation |
- 2021
- 2021-09-02CNCN202111026969.2Apatent/CN114088348B/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001036471A (en)* | 1999-07-15 | 2001-02-09 | Mitsubishi Electric Corp | Wavefront error detection device and wavefront error detection method |
| US20070222948A1 (en)* | 2006-03-23 | 2007-09-27 | Visx, Incorporated | Systems and methods for wavefront reconstruction for aperture with arbitrary shape |
| CN104239740A (en)* | 2014-09-26 | 2014-12-24 | 中国科学院光电技术研究所 | Mode wavefront restoration method based on Hartmann wavefront sensor |
| CN106969844A (en)* | 2017-01-06 | 2017-07-21 | 北京理工大学 | Slope and curvature signal extracting method based on sub-aperture wavefront Modulation and Amplitude Modulation |
Non-Patent Citations (1)
| Title |
|---|
| 李光辉 等: "高阶截断误差的斜率和曲率混合型波前重构算法", 《光学技术》* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114088348B (en) | 2022-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Eddington | The dynamics of a stellar system. Third paper: oblate and other distributions | |
| CN110457806A (en) | Full flow field simulation method based on staggered grid with central fifth-order WENO scheme | |
| Rendall et al. | Parallel efficient mesh motion using radial basis functions with application to multi‐bladed rotors | |
| CN102866001B (en) | Based on the measuring method of the imaging system aberration of lateral shearing interference structure | |
| WO2022188336A1 (en) | Sparse-reconstruction-based direction-of-arrival estimation method in case of gain-phase error | |
| Lee et al. | Lagrangian mechanics and variational integrators on two‐spheres | |
| CN105423948A (en) | Splicing-interference-detection aspheric surface shape apparatus using distorting lens and method thereof | |
| CN102749143B (en) | Wavefront reconstruction method for improving measurement accuracy of shack-Hartmann wavefront sensor | |
| CN103293663A (en) | Self-adaptive optical system for controlling multiple wavefront correctors based on voltage decoupling | |
| CN111783198B (en) | A refined dynamic analysis method for suspension bridges based on double beam model | |
| CN103278813A (en) | State estimation method based on high-order unscented Kalman filtering | |
| CN104616059B (en) | A kind of Wave arrival direction estimating method based on quantum particle swarm | |
| CN103852030B (en) | For the free-curved-surface shape reconstructing method of the corrugated nonzero digit interference system that tilts | |
| CN114088348B (en) | Multidirectional Slope and Curvature Hybrid Wavefront Reconstruction Method for Higher-Order Truncation Errors | |
| CN104236855B (en) | Schwarz optical system wavefront aberration measuring method | |
| CN110222396A (en) | The Simulation Evaluation method of parallel arm three-dimensional printer king-post sloped position error | |
| CN106482838B (en) | A Wavefront Sensor Based on Adaptive Fitting | |
| CN109459206B (en) | Ground test unsteady aerodynamic force loading method | |
| CN115533911A (en) | Flexible mechanical arm fractional order modeling and compensating method based on block pulse function | |
| CN104105049A (en) | A Method for Measuring Impulse Response Function of a Room Using Less Microphones | |
| CN110108271A (en) | Starlight deviation compensation method caused by a kind of aero-optical effect | |
| CN102681165A (en) | Decoupling control method of multi-wavefront correction device | |
| CN114648041A (en) | Two-dimensional underdetermined DOA estimation algorithm based on parallel sparse array | |
| CN105067130B (en) | A kind of lateral shearing interference wavefront measuring method of high accuracy, high spatial resolution | |
| CN102878947A (en) | Method for measuring surface shape of optical element based on transverse shearing interference structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |