CN113823097A - A system and method for early warning of highway accidents and traffic guidance - Google Patents
A system and method for early warning of highway accidents and traffic guidanceDownload PDFInfo
- Publication number
- CN113823097A CN113823097ACN202111413736.8ACN202111413736ACN113823097ACN 113823097 ACN113823097 ACN 113823097ACN 202111413736 ACN202111413736 ACN 202111413736ACN 113823097 ACN113823097 ACN 113823097A
- Authority
- CN
- China
- Prior art keywords
- module
- accident
- warning
- vehicle
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription24
- 238000002955isolationMethods0.000claimsabstractdescription45
- 238000004891communicationMethods0.000claimsabstractdescription15
- 230000008859changeEffects0.000claimsdescription21
- 238000012544monitoring processMethods0.000claimsdescription9
- 238000011144upstream manufacturingMethods0.000claimsdescription8
- 230000035772mutationEffects0.000claimsdescription4
- 230000005236sound signalEffects0.000claims2
- 239000006185dispersionSubstances0.000claims1
- 206010039203Road traffic accidentDiseases0.000abstractdescription20
- 230000001681protective effectEffects0.000description17
- 230000004888barrier functionEffects0.000description9
- 239000011521glassSubstances0.000description6
- 230000008569processEffects0.000description6
- 230000005540biological transmissionEffects0.000description5
- 230000000007visual effectEffects0.000description5
- 238000010586diagramMethods0.000description4
- 238000005259measurementMethods0.000description3
- 230000004044responseEffects0.000description3
- 229910000838Al alloyInorganic materials0.000description2
- 229910001209Low-carbon steelInorganic materials0.000description2
- 238000006243chemical reactionMethods0.000description2
- 230000001276controlling effectEffects0.000description2
- 238000013135deep learningMethods0.000description2
- 238000001514detection methodMethods0.000description2
- 230000017525heat dissipationEffects0.000description2
- WHXSMMKQMYFTQS-UHFFFAOYSA-NLithiumChemical compound[Li]WHXSMMKQMYFTQS-UHFFFAOYSA-N0.000description1
- 240000007320Pinus strobusSpecies0.000description1
- 208000027418Wounds and injuryDiseases0.000description1
- 238000010521absorption reactionMethods0.000description1
- 239000000956alloySubstances0.000description1
- 230000009286beneficial effectEffects0.000description1
- 230000001413cellular effectEffects0.000description1
- 239000011248coating agentSubstances0.000description1
- 238000000576coating methodMethods0.000description1
- 230000006378damageEffects0.000description1
- 230000000694effectsEffects0.000description1
- 230000007613environmental effectEffects0.000description1
- 230000006870functionEffects0.000description1
- 208000014674injuryDiseases0.000description1
- 238000007689inspectionMethods0.000description1
- WABPQHHGFIMREM-UHFFFAOYSA-Nlead(0)Chemical compound[Pb]WABPQHHGFIMREM-UHFFFAOYSA-N0.000description1
- 229910052744lithiumInorganic materials0.000description1
- 239000003550markerSubstances0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000000149penetrating effectEffects0.000description1
- 230000001105regulatory effectEffects0.000description1
- 238000005096rolling processMethods0.000description1
- 238000004904shorteningMethods0.000description1
- 230000009466transformationEffects0.000description1
- 238000012800visualizationMethods0.000description1
- 238000004804windingMethods0.000description1
Images








Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B3/00—Audible signalling systems; Audible personal calling systems
- G08B3/10—Audible signalling systems; Audible personal calling systems using electric transmission; using electromagnetic transmission
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B31/00—Predictive alarm systems characterised by extrapolation or other computation using updated historic data
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Emergency Management (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于高速公路安全预警技术领域,尤其涉及一种高速公路事故预警和交通疏导系统与方法。The invention belongs to the technical field of highway safety early warning, and in particular relates to a system and method for early warning of highway accidents and traffic guidance.
背景技术Background technique
随着人们出行需求的日益增加,高速公路的交通流量持续攀升,高速公路的安全问题也随之骤增,交通事故的发生给人们的生命安全带来了威胁,同时也是高速公路发生拥挤的主要原因。With the increasing demand for people's travel, the traffic flow of expressways continues to rise, and the safety problems of expressways also increase sharply. reason.
在影响驾驶员行车的诸多交通环境因素中,视觉的影响起着主导作用。人、车、路、环境等信息特征,经驾驶员分析、判断后会产生不同的反应和决策。驾驶员的不同反应、决策与车辆行驶状态、前方道路交通情况的不同组合,构成了影响高速公路交通事故的主要原因。而且在实际的高速公路环境下,还伴随有部分人群不正确摆放三角警示牌、报警求救电话难以告知准确事故地点、后面车辆不能提前预知交通事故等现象,往往可能导致更为严重的二次交通事故。Among the many traffic environment factors that affect the driver's driving, the influence of vision plays a leading role. Information characteristics such as people, vehicles, roads, and environments will produce different reactions and decisions after the driver's analysis and judgment. The driver's different reactions, decision-making and different combinations of the vehicle's driving state and the road traffic situation ahead constitute the main reasons that affect highway traffic accidents. Moreover, in the actual highway environment, there are also phenomena such as incorrect placement of warning triangles by some people, difficulty in telling the exact location of the accident by calling the police for help, and failure of vehicles behind to predict traffic accidents in advance, which may often lead to more serious secondary accidents. traffic accident.
因此,当高速公路上发生交通事故时,前方事故信息的显现与传递对于预防二次交通事故具有非常重要的作用,如果能尽早发现和排除高速公路上的事故可以大大避免二次事故,减少交通事故带来的生命安全与经济财产损失。所以,高速公路上的事故预警设置非常重要。高速公路事故预警与交通疏导系统就是针对高速公路的特点、事故特征而建立的,以期及时、准确地检测事故,采用正确有效的方式排除事故,最大限度地减少人员的伤害,降低事故死亡率,保障高速公路安全、畅通、高效运行。Therefore, when a traffic accident occurs on the expressway, the display and transmission of the accident information ahead plays a very important role in preventing the secondary traffic accident. If the accident on the expressway can be detected and eliminated as soon as possible, the secondary accident can be greatly avoided and the traffic Life safety and economic and property losses caused by accidents. Therefore, the accident warning setting on the highway is very important. The expressway accident early warning and traffic guidance system is established according to the characteristics and accident characteristics of expressways, in order to detect accidents in a timely and accurate manner, use correct and effective methods to eliminate accidents, minimize personnel injuries, and reduce accident fatality. Ensure the safe, smooth and efficient operation of expressways.
发明内容SUMMARY OF THE INVENTION
本发明的目的是提供一种高速公路事故预警和交通疏导系统与方法,事故预警系统可实时检测事故和事故风险,当检测到事故则进行警示,当检测到事故风险则进行提醒;当检测到事故,交通疏导系统可将交通导识信息进行可视化投影,以进行车辆疏导。The purpose of the present invention is to provide a highway accident early warning and traffic guidance system and method, the accident early warning system can detect accidents and accident risks in real time, when an accident is detected, it will give a warning, and when an accident risk is detected, it will be reminded; Accidents, the traffic guidance system can visualize the traffic guidance information for vehicle guidance.
本发明提供的一种高速公路事故预警系统,包括安装于高速公路路边的隔离栏上且可沿隔离栏滑动的轨道预警装置;所述轨道预警装置包括与隔离栏适配的轨道卡、动力模块、图像采集模块、雷达传感模块、定位模块、无线通信模块、警示模块、中央控制模块和电源模块;轨道预警装置通过轨道卡安装于隔离栏上;动力模块包括若干动力轮对以及驱动动力轮对沿隔离栏滑动的驱动模块;The present invention provides a highway accident early warning system, comprising a track early warning device installed on the isolation fence on the side of the highway and slidable along the isolation fence; the track early warning device includes a track card, a power module, image acquisition module, radar sensor module, positioning module, wireless communication module, warning module, central control module and power supply module; the track early warning device is installed on the isolation fence through the track card; the power module includes several power wheel pairs and driving power A drive module for the wheelset to slide along the barrier;
动力模块用来根据中央控制模块的指令,控制轨道预警装置沿隔离栏滑动或停止滑动;图像采集模块用来采集路面的图像信息;雷达传感模块用来监测车辆的行驶速度信息;定位模块用来获取轨道预警装置的位置信息;无线通信模块用来与云端进行通信;警示模块用来根据中央控制模块的警示指令以声和/或光信号进行警示;电源模块用来给轨道预警装置提供电能;The power module is used to control the track warning device to slide or stop sliding along the isolation fence according to the instructions of the central control module; the image acquisition module is used to collect the image information of the road surface; the radar sensor module is used to monitor the speed information of the vehicle; the positioning module is used to to obtain the position information of the track warning device; the wireless communication module is used to communicate with the cloud; the warning module is used to warn with sound and/or light signals according to the warning instructions of the central control module; the power module is used to provide power to the track warning device ;
中央控制模块用来根据行驶速度信息判断车辆的行驶速度是否小于行驶路段限速范围的下限或是否发生折线式突变,将小于下限或发生突变车辆的图像信息和定位信息上传至云端服务器进一步判断是否发生事故;当接收到云端服务器的事故警情信息,控制警示模块进行警示;当接收到云端服务器的无事故信息,则通过警示模块以声信号提醒驾驶员提速;中央控制模块还用来根据行驶速度信息判断车辆行驶速度是否大于行驶路段限速范围的上限,当大于上限,则通过警示模块以声信号提醒驾驶员减速。The central control module is used to judge whether the driving speed of the vehicle is lower than the lower limit of the speed limit range of the driving section or whether there is a sudden change in a broken line according to the driving speed information, and upload the image information and positioning information of the vehicle less than the lower limit or the mutation occurs to the cloud server for further judgment. When an accident occurs; when the accident alarm information from the cloud server is received, the warning module is controlled to give a warning; when no accident information from the cloud server is received, the warning module is used to remind the driver to speed up with an acoustic signal; the central control module is also used to The speed information judges whether the speed of the vehicle is greater than the upper limit of the speed limit range of the driving section.
在一些具体实施方式中,中央控制模块还用来根据前后车的行驶速度信息判断前后车是否碰撞,当后车行驶速度大于前车行驶速度且持续监测下前后车行驶速度同时发生突变,则判断发生事故,控制警示模块进行警示,同时调用该前后车的图像信息、定位信息连同事故警情上传至云端服务器。In some specific implementations, the central control module is also used to determine whether the front and rear vehicles collide according to the driving speed information of the front and rear vehicles. When an accident occurs, the warning module is controlled to give a warning, and the image information and positioning information of the front and rear vehicles are called and uploaded to the cloud server together with the accident alarm information.
在一些具体实施方式中,当后车行驶速度大于前车行驶速度但持续监测下前后车行驶速度均未发生突变,中央控制模块调用前后车的图像信息上传至云端服务器进一步判断前后车是否在同一车道;当接收到云端服务器发送的在同一车道的提醒指令,中央控制模块通过警示模块以声信号提醒后车驾驶员减速。In some embodiments, when the driving speed of the rear vehicle is greater than the driving speed of the front vehicle but the driving speed of the front and rear vehicles has not changed abruptly under continuous monitoring, the central control module invokes the image information of the front and rear vehicles to upload to the cloud server to further determine whether the front and rear vehicles are in the same Lane; when receiving the reminder command in the same lane sent by the cloud server, the central control module reminds the driver of the rear car to slow down through the warning module with an acoustic signal.
在一些具体实施方式中,所述轨道卡包括设于轨道预警装置上下侧的至少两个钳夹,钳夹一端设有用来与隔离栏咬合的夹持部,另一端连接有调节咬合松紧度的调节件;调节件包括调节主体、一面为螺纹面另一面带连接板的T型移动板、丝杆和驱动丝杆转动的线性马达;调节主体一侧设有横向限位槽,T型移动板横向插入限位槽,其所带连接板伸出调节主体外,钳夹末端与连接板连接;丝杆插入调节主体内且与T型移动板的螺纹面咬合;调节主体另一侧设有电机槽,电机槽内安装驱动丝杆转动的线性马达;线性马达驱动丝杆转动,丝杆带动T型移动板在限位槽内沿竖直方向上下运动,带动钳夹上下运动,从而调节咬合松紧度。In some specific implementations, the rail clip includes at least two jaws arranged on the upper and lower sides of the rail early warning device, one end of the jaws is provided with a clamping part for engaging with the isolation fence, and the other end is connected with a clamping part for adjusting the tightness of the bite. Adjusting part; the adjusting part includes an adjusting body, a T-shaped moving plate with a threaded surface on one side and a connecting plate on the other side, a screw rod and a linear motor driving the rotation of the screw; It is inserted into the limit slot horizontally, and its connecting plate extends out of the adjusting body, and the end of the clamp is connected with the connecting plate; the screw rod is inserted into the adjusting body and engages with the threaded surface of the T-shaped moving plate; the other side of the adjusting body is provided with a motor The linear motor that drives the screw to rotate is installed in the motor slot; the linear motor drives the screw to rotate, and the screw drives the T-shaped moving plate to move up and down in the vertical direction in the limit slot, which drives the clamp to move up and down, so as to adjust the tightness of the bite Spend.
本发明提供的一种高速公路事故预警方法,包括:A highway accident early warning method provided by the present invention includes:
S100:上述轨道预警装置在巡逻段执行巡逻任务,图像采集模块实时或根据中央控制模块的指令采集路面的图像信息,雷达传感模块实时监测车辆的行驶速度信息;S100: The above-mentioned track early warning device performs a patrol task in the patrol section, the image acquisition module collects the image information of the road surface in real time or according to the instructions of the central control module, and the radar sensor module monitors the driving speed information of the vehicle in real time;
S200:中央控制模块根据行驶速度信息和图像信息进行事故判断,当判断发生事故或存在事故风险,则通过警示模块进行警示或提醒。S200: The central control module judges the accident according to the driving speed information and the image information, and when it is judged that an accident has occurred or there is an accident risk, the warning module is used to warn or remind.
本发明中事故风险包括行驶速度超过行驶路段限速范围、以及在同一车道的后车行驶速度大于前车行驶速度。In the present invention, the accident risk includes that the driving speed exceeds the speed limit range of the driving section, and the driving speed of the following vehicle in the same lane is higher than the driving speed of the preceding vehicle.
在一些具体实施方式中,步骤S200进一步包括:In some specific embodiments, step S200 further includes:
S211:根据行驶速度信息获取车辆的行驶速度,判断车辆行驶速度是否小于行驶路段限速范围的下限或是否发生折线式突变,若小于下限或发生折线式突变,执行步骤S212;若既不小于下限也未发生折线式突变,执行步骤S214;S211: Acquire the driving speed of the vehicle according to the driving speed information, and determine whether the driving speed of the vehicle is less than the lower limit of the speed limit range of the driving section or whether a sudden change occurs in a broken line. If no zigzag mutation occurs, step S214 is executed;
S212:调用图像采集模块采集的该车辆图像信息,将图像信息和定位信息上传至云端服务器判断是否发生事故;S212: Invoke the image information of the vehicle collected by the image acquisition module, and upload the image information and positioning information to the cloud server to determine whether an accident has occurred;
S213:当接收到云端服务器发送的事故警情信息,则通过警示模块进行警示,同时结束该车辆的事故判断;当接收到云端服务器发送的未发生事故信息,但仍存在事故风险,则通过警示模块以声信号提醒驾驶员提高车速,继续执行步骤S211;S213: When receiving the accident alarm information sent by the cloud server, the warning module is used to give a warning, and at the same time, the accident judgment of the vehicle is ended; when the accident information sent by the cloud server is received, but there is still an accident risk, the warning is passed. The module reminds the driver to increase the vehicle speed with an acoustic signal, and continues to execute step S211;
S214:继续判断车辆行驶速度是否大于行驶路段限速范围的上限,若是,存在事故风险,通过警示模块以声信号提醒驾驶员减速,之后继续执行步骤S211;若否,仍然继续执行步骤S211。S214: Continue to judge whether the vehicle speed is greater than the upper limit of the speed limit range of the driving section, if so, there is an accident risk, remind the driver to slow down through the warning module with an acoustic signal, and then continue to step S211; if not, continue to perform step S211.
在一些具体实施方式中,步骤S200进一步包括:In some specific embodiments, step S200 further includes:
S221:根据行驶速度信息获取前后车的行驶速度,判断后车行驶速度是否大于前车行驶速度,若是,执行步骤S222;若否,继续执行步骤S221;S221: Acquire the driving speeds of the front and rear vehicles according to the driving speed information, and determine whether the driving speed of the rear vehicle is greater than the driving speed of the front vehicle, if so, go to step S222; if not, continue to perform step S221;
S222:持续监测,判断后车和前车行驶速度是否同时发生折线式突变,如是,判断发生事故,调用图像采集模块采集的该前后车图像信息,将图像信息、定位信息及事故警情上传至云端服务器,同时结束该前后车的事故判断;若否,调用图像采集模块采集的前后车图像信息,将图像信息和定位信息上传至云端服务器,在云端服务器判断前后车是否在同一车道;S222: Continue monitoring to determine whether the speed of the rear vehicle and the front vehicle has a sudden change of line at the same time. If so, determine that an accident has occurred, call the image information of the front and rear vehicles collected by the image acquisition module, and upload the image information, positioning information and accident alarm information to the The cloud server will end the accident judgment of the front and rear vehicles at the same time; if not, call the image information of the front and rear vehicles collected by the image acquisition module, upload the image information and positioning information to the cloud server, and judge whether the front and rear vehicles are in the same lane on the cloud server;
S223:当中央控制模块接收到云端服务器发来前后车在同一车道的提醒指令,存在事故风险,通过警示模块以声信号提醒后车驾驶员减速;当中央控制模块未接收到提醒指令,则继续执行步骤S221。S223: When the central control module receives a reminder command from the cloud server that the front and rear vehicles are in the same lane, there is a risk of an accident, and the warning module uses an acoustic signal to remind the driver of the rear car to slow down; when the central control module does not receive the reminder command, it continues Step S221 is executed.
在一些具体实施方式中,多个轨道预警装置安装于隔离栏上的不同巡逻段,当判断发生事故或接收到中央控制模块上传的事故警情,云端服务器根据事故点的定位信息,向事故点附近预设范围内的轨道预警装置均发布警情,接收到警情的轨道预警装置,则通过中央控制模块控制警示模块进行警示。In some specific implementations, a plurality of track warning devices are installed on different patrol sections on the isolation fence. When it is judged that an accident has occurred or the accident alarm information uploaded by the central control module is received, the cloud server will send the information to the accident point according to the location information of the accident point. The orbital early warning devices within the preset range in the vicinity all issue alerts, and the orbital early warning devices that receive the alerts will use the central control module to control the alerting module to give alerts.
本发明提供的一种高速公路交通疏导系统,在前述轨道预警装置基础上还包括投影模块;所述投影模块由中央控制模块控制,当中央控制模块接收到事故警情信息或判断发生事故,则控制投影模块向路面投影交通导识信息。The present invention provides a highway traffic diversion system, which further includes a projection module on the basis of the aforementioned track warning device; the projection module is controlled by a central control module. When the central control module receives accident warning information or judges that an accident occurs, the Control the projection module to project the traffic guidance information to the road surface.
本发明提供一种高速公路交通疏导方法,多个轨道预警装置安装于隔离栏上的不同巡逻段,当判断发生事故或接收到中央控制模块上传的事故警情,云端服务器根据事故点的定位信息,向事故点附近预设范围内的轨道预警装置均发布警情,接收到警情的轨道预警装置运行到事故点上游,按预设的距离间隔排列,向路面投影交通导识信息。所述交通导识信息包括车速调整、变道指示、紧急停车等交通导识信息。The invention provides a highway traffic diversion method. A plurality of track warning devices are installed on different patrol sections on the isolation fence. When it is judged that an accident has occurred or an accident alarm information uploaded by a central control module is received, the cloud server is based on the location information of the accident point. , to the track warning devices within the preset range near the accident point to issue alarm information, and the track warning device that receives the alarm information runs to the upstream of the accident point, arranges them at preset distance intervals, and projects traffic guidance information to the road surface. The traffic guidance information includes traffic guidance information such as vehicle speed adjustment, lane change instructions, and emergency stop.
本发明高速公路事故预警系统在未发生事故时,轨道预警装置在各自的巡逻段进行巡逻,执行区间测速、违法抓拍、高速巡查、车辆跟踪等任务,相比高速公路上固定式电子警察,轨道预警装置更为灵活与智能。在巡逻过程中,当检测出发生事故或有事故风险,轨道预警装置调用图像采集模块拍摄事故现场的图像信息,由无线传输模块将图像信息上传至指挥中心的云端服务器,在云端服务器进行事故的进一步判定,并决策救援派遣方案。当发生事故,警示模块以声音和灯光进行警示。In the highway accident early warning system of the present invention, when no accident occurs, the track early warning device patrols the respective patrol sections, and performs tasks such as interval speed measurement, illegal capture, high-speed inspection, vehicle tracking, etc. Compared with the fixed electronic police on the highway, the track The early warning device is more flexible and intelligent. During the patrol process, when an accident or risk of accident is detected, the orbit warning device calls the image acquisition module to capture the image information of the accident scene, and the wireless transmission module uploads the image information to the cloud server of the command center, where the accident detection is carried out on the cloud server. Further judgment and decision on rescue dispatch plan. When an accident occurs, the warning module will warn with sound and light.
在优选方案中,在公路沿途的警示桩上部署有警示灯,当发生事故,事故地附近警示灯亮起。同路段的多台轨道预警装置沿隔离栏行驶至事故点上游约2km范围内,多台轨道预警装置联动形成阵列式警示。In the preferred solution, warning lights are deployed on the warning piles along the road, and when an accident occurs, the warning lights near the accident site are on. Multiple track warning devices on the same road section drive along the isolation fence to a range of about 2km upstream of the accident point, and multiple track warning devices are linked to form an array of warnings.
在优选方案中,还可通过地面投影将交通导识信息可视化,以提醒驾驶员减速、变道或急停,以避免二次事故发生。如若警务平台率先获知事故警情,将事故警情上报至指挥中心的云端服务器,云端服务器调用事故点附近的多台轨道预警装置,到达事故现场,进行警示和/或交通导识,避免二次事故与保护事故当事人。In a preferred solution, the traffic guidance information can also be visualized through ground projection to remind drivers to slow down, change lanes or make an emergency stop to avoid secondary accidents. If the police platform is the first to know the accident alarm information, it will report the accident alarm information to the cloud server of the command center, and the cloud server will call multiple rail early warning devices near the accident point to arrive at the accident scene, and give warnings and/or traffic guidance to avoid two Accidents and protection of accident parties.
本发明的优点和有益效果概括如下:The advantages and beneficial effects of the present invention are summarized as follows:
(1)相对固定式电子警察,本发明轨道预警装置结构更简单,成本更低,其可沿隔离栏移动,执行巡逻任务,包括动态化区间测速、违法抓拍、路况图像信息的实时上传等。可替代高速巡警的人工执勤,提高了高速巡警的安全性。(1) Compared with the fixed electronic police, the track early warning device of the present invention has a simpler structure and lower cost, and can move along the isolation fence to perform patrol tasks, including dynamic interval speed measurement, illegal capture, and real-time upload of road condition image information. It can replace the manual duty of high-speed patrol officers and improve the safety of high-speed patrol officers.
(2)本发明轨道预警装置可直接安装于大部分高速公路两侧隔离栏上,对于不适配的隔离栏,进行简单改造即可,无需重新铺设行驶轨道,更为经济。(2) The track pre-warning device of the present invention can be directly installed on the isolation barriers on both sides of most expressways, and it is more economical to carry out simple transformation for the unsuitable isolation barriers without re-laying the running track.
(3)本发明轨道预警装置可根据监测的车辆行驶速度信息进行事故和事故风险检测,再结合图像信息在云端服务器进行事故的准确判断,当判断有事故发生,可第一时间确定事故类型和救援等级,合理派遣救援力量。通过定位模块可获知事故点准确位置,从而可精准派遣救援与救护车辆。(3) The track early warning device of the present invention can perform accident and accident risk detection according to the monitored vehicle speed information, and then combine the image information to accurately judge the accident on the cloud server. When it is judged that an accident has occurred, the accident type and Rescue level, reasonable dispatch of rescue forces. Through the positioning module, the exact location of the accident point can be known, so that rescue and ambulance vehicles can be dispatched accurately.
(4)利用投影模块向路面投影导识信息,通过导识信息可视化,第一时间干涉交通,给驾驶员传达更准确的交通导识信息,避免二次事故发生。相比于语音提醒,视觉导识信息更直观且不会受环境噪音影响、不会被误解;相对手机等移动端设备的提醒,驾驶员将注意力从高速驾驶状态切换至手机屏幕上,容易使驾驶员分神,存在安全隐患。(4) Use the projection module to project the guidance information to the road surface, through the visualization of the guidance information, intervene in the traffic at the first time, convey more accurate traffic guidance information to the driver, and avoid secondary accidents. Compared with voice reminders, visual guidance information is more intuitive and will not be affected by environmental noise and will not be misunderstood. Compared with reminders from mobile devices such as mobile phones, it is easier for drivers to switch their attention from high-speed driving to the mobile phone screen. The driver is distracted and there is a safety hazard.
(5)目前事故当事人一般通过摆放三角警示牌来进行事故警示,但总是存在摆放不及时、不专业等问题,由此可能引起二次事故。本发明利用警示模块,无需摆放三角警示牌,也可进行事故警示。在事故发生后,事故点上游沿途2km内的警示模块进行警示,同时由投影模块向路面投影导识信息进行交通疏导,既可确保当事人的生命财产安全,也给予上游驾驶员更多的事故响应时间,从而避免二次事故发生。(5) At present, the parties to the accident generally warn the accident by placing warning triangles, but there are always problems such as untimely and unprofessional placement, which may cause secondary accidents. The present invention utilizes the warning module, and can also carry out accident warning without placing warning triangles. After the accident, the warning module within 2km upstream of the accident point will give warning, and at the same time, the projection module will project the guidance information to the road to guide the traffic, which can not only ensure the safety of life and property of the parties, but also give the upstream driver more accident response. time to avoid secondary accidents.
(6)实施例中采用包括扬声器的语音模块,轨道预警装置可通过扬声器告知事故当事人事故处理办法;位于事故上游的轨道预警装置也可沿途播报事故情况,同时告知驾驶员提前变更至安全车道行驶。(6) In the embodiment, a voice module including a speaker is adopted, and the track warning device can inform the parties involved in the accident through the speaker; the track warning device located upstream of the accident can also broadcast the accident situation along the way, and at the same time inform the driver to change to a safe lane in advance. .
附图说明Description of drawings
图1为实施例1中轨道预警装置的功能结构框图;Fig. 1 is the functional structure block diagram of the track early warning device in the
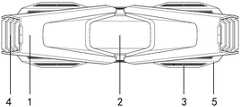
图2为实施例2中轨道预警装置外观的前视图;Fig. 2 is the front view of the appearance of the track early warning device in
图3为实施例2中轨道预警装置外观的后视图;Fig. 3 is the rear view of the appearance of the track warning device in
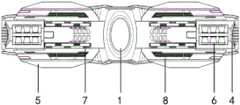
图4为实施例2中轨道预警装置安装于隔离栏上的前视图;Fig. 4 is the front view that the rail early warning device is installed on the isolation fence in
图5为实施例2中轨道预警装置安装于隔离栏上的侧视图;Fig. 5 is the side view that the rail early warning device is installed on the isolation fence in the
图6为实施例2中轨道卡的结构示意图;Fig. 6 is the structural representation of the track card in the
图7为实施例2中轨道卡中调节件的放大图;7 is an enlarged view of the adjusting member in the track card in
图8为实施例3中交通事故判断流程图;Fig. 8 is the traffic accident judgment flow chart in
图9为实施例4中交通事故判断流程图;Fig. 9 is the traffic accident judgment flow chart in
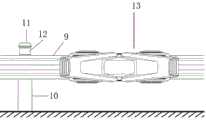
图10为实施例6中变道导识信息的投影示意图;Fig. 10 is the projection schematic diagram of lane change guidance information in
图11为实施例6中禁行导识信息的投影示意图。FIG. 11 is a schematic projection diagram of the forbidden guide information in
图中,1-保护壳,2-玻璃盖,3-警示灯,4-示廓灯,5-轨道卡,510-钳夹,511-夹持部,512-调节主体,513-T型移动板,514-丝杆,515-电机槽,516-螺钉,6-动力轮对,7-导热板,8-限位轮,9-隔离栏,10-桩主体,11-太阳能板,12-警示桩警示灯,13-轨道预警装置,14-事故点,15-交通导识投影区。In the figure, 1-protective shell, 2-glass cover, 3-warning light, 4-marker light, 5-track card, 510-clamp, 511-clamping part, 512-adjustment body, 513-T-type movement Plate, 514-Screw, 515-Motor Slot, 516-Screw, 6-Power Wheelset, 7-Conductive Plate, 8-Limiting Wheel, 9-Isolation Bar, 10-Pile Body, 11-Solar Panel, 12- Warning pile warning lights, 13-track warning device, 14-accident point, 15-traffic guidance projection area.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下将结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的实施例仅仅用以解释本发明,并不用于限定本发明。In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the embodiments described herein are only used to explain the present invention, but not to limit the present invention.
实施例1Example 1
本实施例中高速公路事故预警系统包括轨道预警装置,该轨道预警装置安装于高速公路路边的隔离栏上且可沿隔离栏滑动。所述轨道预警装置包括与隔离栏适配的轨道卡、动力模块、图像采集模块、雷达传感模块、定位模块、无线通信模块、警示模块、中央控制模块、电源模块,图1所示为本实施例轨道预警装置的功能结构示意图(图中未示出电源模块)。In this embodiment, the highway accident early warning system includes a track early warning device, and the track early warning device is installed on the isolation fence on the side of the highway and can slide along the isolation fence. The track early warning device includes a track card, a power module, an image acquisition module, a radar sensing module, a positioning module, a wireless communication module, a warning module, a central control module, and a power supply module adapted to the isolation fence, as shown in Figure 1. A schematic diagram of the functional structure of the track early warning device of the embodiment (the power module is not shown in the figure).
轨道卡应与所安装的隔离栏适配,轨道预警装置通过轨道卡安装于隔离栏上。动力模块用来驱动轨道预警装置沿隔离栏滑动。本实施例中动力模块包括若干动力轮对以及驱动动力轮对沿隔离栏滑动的驱动单元,驱动单元采用ZNCD-1043型号驱动模块,其驱动电流为0-43A,驱动电压为5.5V-25V,驱动单元接收中央控制模块的指令,并根据指令控制动力轮对的电机转动或停止。The track card should be adapted to the installed isolation barrier, and the track warning device is installed on the isolation barrier through the track card. The power module is used to drive the track warning device to slide along the isolation fence. In this embodiment, the power module includes a number of power wheel pairs and a drive unit that drives the power wheel pairs to slide along the isolation fence. The drive unit adopts the ZNCD-1043 model drive module with a drive current of 0-43A and a drive voltage of 5.5V-25V. The drive unit receives the command from the central control module, and controls the motor of the power wheel pair to rotate or stop according to the command.
图像采集模块用于采集路面的图像信息,本实施例中,图像采集模块采用高清摄像头模组。雷达传感模块通过发射雷达波并接收汽车反射的雷达波,因此可用于车辆识别和车速监测。本发明中采用雷达传感模块识别路面车辆并实时监测车辆的行驶速度信息,雷达传感模块采用TBR-321侧装多车道多目标雷达。定位模块用于获取轨道预警装置的位置信息,本实施例采用ATK1218-BD北斗双模定位模块。无线传输模块用于轨道预警装置与外部通信,具体用于轨道预警装置与云端服务器的相互通信。本实施例中无线传输模块采用蜂窝网络模块,具体采用WH-LTE-7S4 V2型号无线传输模块。电源模块用来给轨道预警装置提供电能,本实施例中电源模块采用大容量可充电锂电池。The image acquisition module is used to collect image information of the road surface. In this embodiment, the image acquisition module adopts a high-definition camera module. The radar sensor module can be used for vehicle identification and vehicle speed monitoring by transmitting radar waves and receiving radar waves reflected by the car. In the present invention, the radar sensing module is used to identify road vehicles and monitor the running speed information of the vehicle in real time, and the radar sensing module adopts TBR-321 side-mounted multi-lane multi-target radar. The positioning module is used to obtain the position information of the orbit early warning device. In this embodiment, the ATK1218-BD Beidou dual-mode positioning module is used. The wireless transmission module is used for the communication between the orbit early warning device and the outside, and is specifically used for the mutual communication between the orbit early warning device and the cloud server. In this embodiment, the wireless transmission module adopts a cellular network module, specifically a WH-LTE-7S4 V2 wireless transmission module. The power module is used to provide electric power to the track warning device, and in this embodiment, the power module adopts a large-capacity rechargeable lithium battery.
当接收到中央控制模块的警示指令时,警示模块以声和/或光信号进行警示。本实施例中警示模块可以同时以声和光信号进行警示,该警示模块包括语音模块和灯光模块。语音模块主要为扬声器,选择警用级别扬声器,因其具有声音密度高、声音强度大、谐和共鸣的特点,在户外场景中声音有较强穿透力且不易扩散,更适用噪声复杂的高速公路。灯光模块采用红蓝LED警示灯。语音模块和灯光模块由中央控制模块直接控制。本实施例中,当接收到警示指令,红蓝LED警示灯以动态频闪形式进行警示,同时,扬声器进行播报,用来替代警车呈现警情讯息。When receiving the warning instruction from the central control module, the warning module will give a warning by sound and/or light signal. In this embodiment, the warning module can give warning by sound and light signals at the same time, and the warning module includes a voice module and a light module. The voice module is mainly a loudspeaker, and the police-grade loudspeaker is selected. Because of its high sound density, high sound intensity, and harmonious resonance, the sound has strong penetrating power and is not easy to diffuse in outdoor scenes, and is more suitable for high-speed high-speed noise with complex noise. highway. The light module adopts red and blue LED warning lights. The voice module and light module are directly controlled by the central control module. In this embodiment, when a warning command is received, the red and blue LED warning lights give warning in the form of dynamic stroboscopic flashes, and at the same time, the speaker broadcasts the warning message to replace the police car to present the warning information.
中央控制模块用来控制动力模块和警示模块,用来接收图像采集模块和定位模块采集的数据并上传至云端服务器,还用来根据雷达传感模块采集的行驶速度信息进行事故预判。The central control module is used to control the power module and the warning module, to receive the data collected by the image acquisition module and the positioning module and upload it to the cloud server, and to predict the accident according to the driving speed information collected by the radar sensor module.
本实施例中,中央控制模块采用STM32F407ZGT6芯片,其主要起到控制以及进行事故预判的作用。中央控制模块用来根据行驶速度信息判断车辆的行驶速度是否小于行驶路段限速范围的下限或是否发生折线式突变,行驶速度小于下限或发生折线式突变的车辆可能发生事故,将可能发生事故车辆的图像信息和定位信息上传至云端服务器,在云端服务器做进一步判断是否发生事故。当云端服务器判断为发生事故,则向中央控制模块发送事故警情信息。当接收到云端服务器发送的事故警情信息,中央控制模块控制警示模块进行警示。当云端服务器判断为未发生事故,表明车辆行驶速度过低,存在事故风险。中央控制模块则通过警示模块以声信号提醒驾驶员提速。当中央控制模块根据行驶速度信息判断车辆的行驶速度大于行驶路段限速范围的上限,表明车辆行驶速度过高,同样存在事故风险,中央控制模块则通过警示模块以声信号提醒驾驶员减速。In this embodiment, the central control module adopts the STM32F407ZGT6 chip, which mainly plays the role of control and accident prediction. The central control module is used to judge whether the driving speed of the vehicle is lower than the lower limit of the speed limit range of the driving section or whether there is a sudden change in the broken line according to the driving speed information. The image information and positioning information are uploaded to the cloud server, and the cloud server will further judge whether an accident has occurred. When the cloud server judges that an accident has occurred, it sends accident alarm information to the central control module. When receiving the accident alarm information sent by the cloud server, the central control module controls the warning module to warn. When the cloud server judges that no accident has occurred, it indicates that the vehicle's driving speed is too low and there is an accident risk. The central control module reminds the driver to increase the speed with an audible signal through the warning module. When the central control module judges that the driving speed of the vehicle is greater than the upper limit of the speed limit range of the driving section according to the driving speed information, it indicates that the driving speed of the vehicle is too high, and there is also an accident risk.
本实施例中,中央控制模块还用来根据前后车的行驶速度信息判断前后车是否碰撞,当后车行驶速度大于前车行驶速度且持续监测下前后车行驶速度同时发生折线式突变,则判断发生事故,中央控制模块控制警示模块进行警示,同时调用该前后车的图像信息、定位信息连同事故警情上传至云端服务器。当后车行驶速度大于前车行驶速度但持续监测下前后车行驶速度均未发生突变,中央控制模块调用前后车的图像信息上传至云端服务器,在云端服务器进一步判断前后车是否在同一车道;若在同一车道,表明存在事故风险,中央控制模块通过警示模块以声信号提醒后车驾驶员减速。若不在同一车道,则为低风险,不做提醒。In this embodiment, the central control module is also used to determine whether the front and rear vehicles collide according to the driving speed information of the front and rear vehicles. When an accident occurs, the central control module controls the warning module to warn, and at the same time, the image information and positioning information of the front and rear vehicles are called and uploaded to the cloud server together with the accident alarm information. When the driving speed of the rear vehicle is greater than the driving speed of the front vehicle, but the driving speed of the front and rear vehicles has not changed abruptly under continuous monitoring, the central control module calls the image information of the front and rear vehicles to upload to the cloud server, and the cloud server further judges whether the front and rear vehicles are in the same lane; if In the same lane, indicating that there is a risk of accident, the central control module reminds the driver of the rear car to slow down through the warning module with an acoustic signal. If they are not in the same lane, the risk is low and no reminder is given.
考虑增加轨道预警装置的夜间可视性,本实施例的优选方案有:在轨道预警装置外设置示廓灯,当夜间示廓灯亮起时,可呈现出轨道预警装置的轮廓,以引起驾驶员注意。示廓灯可选择表面涂敷反光层的红色LED灯。考虑到便于与云端进行语音沟通,本实施例的另一优选方案有:在轨道预警装置中再设置一用来收音的麦克风,可将现场声音发送给中央控制模块,再经无线通信模块上传给云端服务器。Considering increasing the nighttime visibility of the track early warning device, the preferred solution of this embodiment is as follows: a profile light is set outside the track early warning device, and when the profile light is on at night, the outline of the track early warning device can be displayed, so as to cause the driver to Notice. The position light can choose the red LED light with reflective coating on the surface. Considering the convenience of voice communication with the cloud, another preferred solution of this embodiment is as follows: a microphone for sound collection is set up in the track early warning device, and the on-site sound can be sent to the central control module, and then uploaded to the wireless communication module. Cloud server.
实施例2Example 2
本实施例将提供实施例1中轨道预警装置的一种具体结构。This embodiment will provide a specific structure of the track early warning device in
见图2-3,本实施例轨道预警装置包括一保护壳1,保护壳1起到支撑和保护的作用。本实施例中,保护壳1采用SPCC冷轧低碳钢板制备,SPCC冷轧低碳钢板具有成本低、安全可靠、不易形变的特点。动力模块、图像采集模块、定位模块、无线通信模块、警示模块、中央控制模块和电源模块均布署于保护壳1内。雷达传感模块安装于保护壳1左右两侧,便于对车辆进行测速。在保护壳1前端中部装有玻璃盖2,图像采集模块部署于玻璃盖2内侧,透过玻璃盖2对公路进行实时监测。玻璃盖2采用单向透明玻璃,不影响图像采集模块的监测。本实施例中图像采集模块包括一款日间使用摄像头和一款夜间使用摄像头,两款摄像头均可180度旋转。警示模块中的警示灯3安装于保护壳1上和/或下侧,示廓灯4安装于保护壳1两端,当示廓灯4点亮可呈现保护壳1轮廓。Referring to Figs. 2-3, the track early warning device in this embodiment includes a
本实施例中,动力模块采用6对动力轮对6、驱动动力轮对6转动的电机、以及用于驱动和控制电机的驱动模块;电机采用XD-37GB3525绕组直流调速电机;驱动模块采用ZNCD-1043型号驱动模块,驱动电流0-43A,驱动电压5.5V-25V,驱动模块由中央控制模块控制。动力轮对6安装于保护壳1后面,保护壳1后面两端分设3对动力轮对6;当保护壳1通过轨道卡5安装于隔离栏上时,动力轮对6与隔离栏竖向接触。In this embodiment, the power module adopts 6 pairs of power wheel pairs 6, a motor for driving the power wheel pairs 6 to rotate, and a drive module for driving and controlling the motor; the motor adopts XD-37GB3525 winding DC speed regulating motor; the driving module adopts ZNCD -1043 model drive module, drive current 0-43A, drive voltage 5.5V-25V, the drive module is controlled by the central control module. The
轨道卡5设于保护壳1后端的上下两侧,通过轨道卡5将保护壳1的后端安装于隔离栏上,保护壳1的前端面向公路。本实施例中,轨道卡5为与隔离栏形状适配的钳形轨道卡,其通过咬合方式安装于隔离栏上,且咬合松紧度可调。安装后的轨道预警装置13见图4-5所示。The track clips 5 are arranged on the upper and lower sides of the rear end of the
本实施例中轨道卡5与目前绝大多数路边隔离栏适配,可直接安装于隔离栏上。对极少不适配的隔离栏,对隔离栏进行简单改造即可。本实施例中,轨道卡5主要包括上下左右对称布置且结构相同的四个钳夹,钳夹结构见图6-7。钳夹510端头设有用来与隔离栏上端或下端咬合的夹持部511,钳夹510末端与调节件固定连接,调节件用来调节钳夹上下移动,从而调节钳夹与隔离栏的咬合松紧度。In this embodiment, the
本实施例中调节件嵌入保护壳内,调节件包括调节主体512,调节主体512一侧设有一横向限位槽,一面为螺纹面另一面带连接板的T型移动板513横向插入限位槽,其所带连接板伸出调节主体512外,通过螺钉516将钳夹510末端与该连接板连接,从而将钳夹510与调节件固定连接。T型移动板513可在限位槽限定的范围内上下移动。一丝杆514插入调节主体512且与T型移动板513的螺纹面咬合。调节主体512另一侧设有电机槽515,电机槽515内安装驱动丝杆514转动的线性马达,线性马达驱动丝杆514转动,带动T型移动板513在限位槽内沿竖直方向上下运动,从而带动钳夹510上下运动,达到调节咬合松紧度的目的。In this embodiment, the adjusting member is embedded in the protective shell, and the adjusting member includes an adjusting
为避免滑动时钳夹和隔离栏之间的滑动磨损,在夹持部511内壁设置限位轮8,本实施例中限位轮8采用耐磨橡胶材质的滚动式轮。考虑到保护壳1内众多元器件的散热问题,本实施例的优选方案有:在保护壳1后端设置导热板7,导热板7为铝合金材质,铝合金具有低成本和低热容的特点,虽然吸热慢,但放热很快,尤其适用于内部元器件的散热。In order to avoid sliding wear between the jaws and the isolation fence during sliding, a
实施例3Example 3
本实施例将提供利用实施例1中轨道预警装置的预警方法,在隔离栏上每间隔预设里程部署一轨道预警装置,本实施例中每隔2km部署一轨道预警装置;各轨道预警装置有各自的巡逻段,轨道预警装置仅在各自巡逻段进行巡逻。This embodiment will provide an early warning method using the track early warning device in
本实施例中预警方法如下:The early warning method in this embodiment is as follows:
S100:轨道预警装置在相应的巡逻段滑动,执行巡逻任务,雷达传感模块识别巡逻段路面车辆并实时监测车辆的行驶速度信息,图像采集模块实时采集巡逻段路面的图像信息。S100: The track warning device slides on the corresponding patrol section to perform patrol tasks, the radar sensing module identifies the vehicles on the patrol section and monitors the vehicle's speed information in real time, and the image acquisition module collects the image information of the patrol section in real time.
S200:基于实时采集的行驶速度信息和图像信息进行交通事故判断,本实施例中基于单车辆的行驶速度信息和图像信息进行交通事故判断。车辆行驶速度主要用于预判,辅以图像信息实现准确判断。S200 : Judging a traffic accident based on the traveling speed information and image information collected in real time. In this embodiment, judging a traffic accident is performed based on the traveling speed information and image information of a single vehicle. Vehicle speed is mainly used for prediction, supplemented by image information to achieve accurate judgment.
见图8所示,本实施例的交通事故判断流程如下:As shown in Figure 8, the traffic accident judgment process of this embodiment is as follows:
将雷达传感模块识别的各路面车辆分别作为当前车辆,对当前车辆进行交通事故判定,步骤如下:Each road vehicle identified by the radar sensing module is regarded as the current vehicle, and the current vehicle is judged for a traffic accident. The steps are as follows:
S211:中央控制模块判断当前车辆的行驶速度是否小于行驶路段限速范围的下限或是否发生折线式突变,若小于下限或发生折线式突变,则可能发生事故,执行步骤S212;若既不小于下限也未发生折线式突变,执行步骤S214。S211: The central control module judges whether the current speed of the vehicle is less than the lower limit of the speed limit range of the driving section or whether a sudden change of the broken line occurs. If it is less than the lower limit or the sudden change of the broken line occurs, an accident may occur, and step S212 is executed; if it is neither less than the lower limit If no zigzag mutation occurs, step S214 is executed.
S212:中央控制模块调用图像采集模块所采集的当前车辆图像信息,将图像信息和定位信息上传至云端服务器,在云端服务器进行是否发生事故的准确判断。S212: The central control module invokes the current vehicle image information collected by the image acquisition module, uploads the image information and positioning information to the cloud server, and accurately judges whether an accident has occurred in the cloud server.
在云端服务器,根据图像信息,判断当前车辆是否发生事故;若判断发生事故,则向中央控制模块发布事故警情信息;否则,向中央控制模块发布无事故信息。判断是否发生事故,可通过在云端服务器置入深度学习车辆碰撞识别算法自动判断;也可根据图像信息进行人工判断。当判断为发生事故,人工给出事故类型与救援响应等级,并进行发布。In the cloud server, according to the image information, it is judged whether the current vehicle has an accident; if it is judged that an accident has occurred, the accident alarm information is released to the central control module; otherwise, no accident information is released to the central control module. To judge whether an accident has occurred, it can be automatically judged by placing a deep learning vehicle collision recognition algorithm in the cloud server; it can also be judged manually based on image information. When it is judged that an accident has occurred, the accident type and rescue response level are manually given and released.
S213:当中央控制模块接收到云端服务器发送的事故警情信息,则通过警示模块发布警情,警示模块中红蓝LED警示灯闪烁,同时扬声器进行同步播报,结束当前车辆的交通事故判断;当接收到云端服务器发送的未发生事故信息,说明当前车辆仅仅只是行驶速度过低,存在事故风险,则通过警示模块的扬声器提醒驾驶员提高车速,继续执行步骤S211;S213: When the central control module receives the accident alarm information sent by the cloud server, it releases the alarm information through the warning module, the red and blue LED warning lights in the warning module flash, and the speaker broadcasts synchronously, ending the current vehicle traffic accident judgment; when After receiving the no-accident information sent by the cloud server, indicating that the current vehicle is only traveling at a low speed and there is a risk of an accident, the driver is reminded to increase the vehicle speed through the speaker of the warning module, and step S211 is continued;
S214:中央控制模块继续判断当前车辆行驶速度是否大于行驶路段限速范围的上限,若是,说明当前车辆车速过高,存在事故风险,通过警示模块的扬声器提醒驾驶员减速,之后继续执行步骤S211;若否,说明无事故风险,仍然继续执行步骤S211。S214: The central control module continues to judge whether the current vehicle speed is greater than the upper limit of the speed limit range of the driving section, and if so, it means that the current vehicle speed is too high and there is an accident risk, and reminds the driver to slow down through the speaker of the warning module, and then proceeds to step S211; If no, it means that there is no accident risk, and step S211 is still executed.
当前车辆驶出轨道预警装置的巡逻段,则结束对该车辆的交通事故判断流程。When the current vehicle leaves the patrol section of the track warning device, the traffic accident judgment process for the vehicle ends.
本实施例中,首先由中央控制模块基于雷达传感模块所监测的车辆行驶速度信息进行事故的初步判断,此为非可视化判断;再在云端服务器,根据图像采集模块采集的图像信息,由人工协助进行准确判断,此为可视化判断。In this embodiment, the central control module firstly makes a preliminary judgment of the accident based on the vehicle speed information monitored by the radar sensing module, which is a non-visual judgment; To assist in making accurate judgments, this is a visual judgment.
为扩大警示范围,本实施例的优选方案有:当发生事故,云端服务器根据事故点的定位信息,向事故点附近预设范围内的轨道预警装置均发布警情,接收到警情的轨道预警装置,则通过中央控制模块控制警示模块进行警示,以提醒驾驶员。In order to expand the warning range, the preferred solution of this embodiment is as follows: when an accident occurs, the cloud server, according to the location information of the accident point, releases the warning information to the orbital early warning devices within the preset range near the accident point, and receives the orbital warning of the warning information. If the device is installed, the central control module controls the warning module to give warnings to remind the driver.
另外,云端服务器还可通知距离事故点最近的轨道预警装置赶到事故点,采集现场图像信息,并上传给云端服务器。同时,还可通过轨道预警装置的扬声器播报正确的事故处理方法,或慰藉当事人等待救援。In addition, the cloud server can also notify the orbital early warning device closest to the accident point to rush to the accident point, collect on-site image information, and upload it to the cloud server. At the same time, it can also broadcast the correct accident handling method through the speaker of the track warning device, or comfort the parties to wait for rescue.
实施例4Example 4
本实施例与实施例3的区别在于步骤S200,本实施例中基于多车辆的行驶速度信息和图像信息进行交通事故判断。下面仅对本实施例步骤S200的具体实施过程进行描述。The difference between this embodiment and
S200:基于实时采集的行驶速度信息和图像信息进行交通事故判断,本实施例中基于多车辆的行驶速度和图像信息进行交通事故判断。S200 : Judging a traffic accident based on the traveling speed information and image information collected in real time. In this embodiment, judging a traffic accident is performed based on the traveling speed and image information of multiple vehicles.
见图9所示,本实施例的交通事故判断流程如下:As shown in Figure 9, the traffic accident judgment process of the present embodiment is as follows:
将雷达传感模块识别的路面前后车辆分别作为当前的前后车,对当前的前后车进行交通事故判定,步骤如下:The front and rear vehicles on the road identified by the radar sensing module are regarded as the current front and rear vehicles respectively, and the traffic accident determination is performed on the current front and rear vehicles. The steps are as follows:
S221:中央控制模块判断后车行驶速度V后是否大于前车行驶速度V前,若是,说明前后车的安全距离在缩短,有碰撞风险,此时执行步骤S222;若否,说明前后车有足够的安全距离,无碰撞风险,继续执行步骤S221;S221: The central control module judges whether the speed V of the rear vehicle is greater than that of the preceding vehicle. If so, it means that the safety distance between the front and rear vehicles is shortening, and there is a risk of collision, then step S222 is executed; if not, it means that the front and rear vehicles have sufficient The safety distance is , and there is no risk of collision, continue to step S221;
S222:持续监测,中央控制模块判断V后与V前是否同时发生折线式突变;若是,说明前后车发生碰撞,调用图像采集模块采集的前后车图像信息,将图像信息、定位信息及事故警情上传至云端服务器,结束前后车的交通事故判断流程;若否,说明前后车未发生碰撞,中央控制模块调用图像采集模块采集的前后车图像信息,将图像信息和定位信息上传至云端服务器。S222: Continuous monitoring, the central control module judges whether there is a fold-line sudden change after V and before V at the same time; if so, it means that the front and rear vehicles collided, and the image information of the front and rear vehicles collected by the image acquisition module is called, and the image information, positioning information and accident alarm information are collected. Upload to the cloud server to end the traffic accident judgment process of the front and rear vehicles; if not, it means that the front and rear vehicles have not collided, and the central control module calls the image information of the front and rear vehicles collected by the image acquisition module, and uploads the image information and positioning information to the cloud server.
当云端服务器接收到事故警情的图像信息时,由人工给出事故类型与救援响应等级,并进行发布。在前后车未发生碰撞时,在云端服务器,根据图像信息判断前后车是否在同一车道,可通过在云端服务器置入深度学习车辆车道识别算法来自动判断,也可根据图像信息进行人工判断。当判断为在同一车道,存在事故风险,向中央控制模块发送提醒指令;当判断为不在同一车道,说明后车在进行超车,为低事故风险,不做提醒。When the cloud server receives the image information of the accident alarm situation, the accident type and rescue response level are manually given and released. When there is no collision between the front and rear vehicles, the cloud server can judge whether the front and rear vehicles are in the same lane according to the image information. It can be automatically judged by inserting a deep learning vehicle lane recognition algorithm in the cloud server, or it can be manually judged according to the image information. When it is judged that it is in the same lane and there is an accident risk, a reminder command is sent to the central control module; when it is judged that it is not in the same lane, it means that the car behind is overtaking, which means that the risk of accident is low, and no reminder is given.
S223:当中央控制模块接收到云端服务器发来的提醒指令,则通过警示模块以声信号提醒后车驾驶员减速;若未接收到提醒指令,则继续执行步骤S221。S223: When the central control module receives the reminder command sent by the cloud server, the warning module uses an acoustic signal to remind the driver of the rear vehicle to slow down; if the reminder command is not received, step S221 is continued.
实施例5Example 5
本实施例在实施例1轨道预警装置的基础增加了疏导功能,具体地,增加了投影模块,投影模块可向路面进行投影,用以形成可视化的交通导识信息。投影模块由中央控制模块进行控制,其输出内容暂存于中央控制模块的存储单元中。本实施例中投影模块采用PD-TYDDT-FY200型号投影仪,其内置激光投影与自动对焦模组,其投影范围可覆盖整条横向高速路面,主要呈现出红、黄、绿三种警示程度不同的交通导识效果。This embodiment adds a dredging function to the basis of the track warning device in
本实施例相应的事故疏导方法,在实施例3预警方法的基础,还包括:The corresponding accident alleviation method of the present embodiment, on the basis of the early warning method of
当中央控制模块接收到事故警情信息或判断发生事故,中央控制模块控制轨道预警装置运行到事故点上游,向路面投影相应的交通导识信息。若事故发生于超车道,则控制投影模块向超车道的路面投射向快车道和慢车道变道的交通导识信息,以引导驾驶员靠右行驶,避开事故点;同时扬声器也重复播放变道信息。若事故发生于超车道和快车道,则控制投影模块向超车道和快车道的路面投射出向慢车道变道的导识信息,同时扬声器也重复播放变道信息。参见图10,所示为变道导识信息的投影示意,事故点14位于超车道和快车道,则超车道和快车道为交通导识投影区15,在交通导识投影区15投影出靠右变道的导识信息。若事故发生导致所有车道均被堵死,则向路面所有车道投影禁行导识信息。参见图11,事故点14波及所有车道,所有车道均为交通导识投影区15,在交通导识投影区15投影出禁行的导识信息。When the central control module receives the accident warning information or judges that an accident has occurred, the central control module controls the track warning device to run to the upstream of the accident point, and projects the corresponding traffic guidance information to the road surface. If the accident occurs in the overtaking lane, the projection module will be controlled to project the traffic guidance information on the road of the overtaking lane to the fast lane and the slow lane to guide the driver to drive to the right and avoid the accident point; at the same time, the loudspeaker also repeatedly plays the change Road information. If the accident occurs in the overtaking lane and the fast lane, the projection module will be controlled to project the information of changing lanes to the slow lane to the road surface of the overtaking lane and the fast lane, and the speaker will also repeatedly play the lane change information. Referring to FIG. 10 , the projection of the lane change guidance information is shown. The
为扩大疏导范围,本实施例的优选方案有:通过云端服务器向事故附近的若干轨道预警装置均发送指令,若干轨道预警装置滑动到事故点上游,彼此间隔预设距离,向路面进行导识信息的可视化投影。In order to expand the range of evacuation, the preferred solution of this embodiment is as follows: the cloud server sends instructions to several track early warning devices near the accident, and several track early warning devices slide to the upstream of the accident point, spaced a preset distance from each other, and guide information to the road surface. visual projection.
实施例6Example 6
本实施例高速公路事故预警系统在实施例1的基础还包括部署于高速公路路边的若干警示桩,警示桩用于在附近有事故发生时,通过频闪向其他驾驶员进行警示。见图4-5所示,警示桩包括桩主体10、设于桩主体10顶部的太阳能板11、集成式警示灯系统。其中,集成式警示灯系统包括安装于桩主体10上的警示桩警示灯12、给警示桩警示灯12提供电能的电源、控制警示灯开关的继电器、以及用来接收外部信号的短距离无线通信模块。太阳能板用来将采集的光能转换为电能,并存储于电源内;短距离无线通信模块接收附近轨道预警装置的控制指令,根据控制指令开启警示灯。本实施例中,警示桩警示灯采用橙黄色LED灯,短距离无线通信模块采用蓝牙通信模块。当轨道预警装置的中央控制模块接收到云端服务器发送的事故警情信息或判断发生事故,则向附近可通信的警示桩发送控制指令,接收到控制指令的警示桩开启警示灯。The highway accident early warning system of this embodiment also includes several warning piles deployed on the side of the highway on the basis of Example 1. The warning piles are used to warn other drivers through strobes when an accident occurs nearby. As shown in FIGS. 4-5 , the warning pile includes a
上述实施例所述是用以具体说明本发明,文中虽通过特定的术语进行说明,但不能以此限定本发明的保护范围,熟悉此技术领域的人士可在了解本发明的精神与原则后对其进行变更或修改而达到等效目的,而此等效变更和修改,皆应涵盖于权利要求范围所界定范畴内。The above-mentioned embodiments are used to specifically illustrate the present invention. Although specific terms are used to illustrate the present invention, the protection scope of the present invention cannot be limited by this. Those who are familiar with the technical field can understand the spirit and principles of the present invention. It can be changed or modified to achieve the equivalent purpose, and the equivalent changes and modifications should be covered within the scope defined by the scope of the claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111413736.8ACN113823097A (en) | 2021-11-25 | 2021-11-25 | A system and method for early warning of highway accidents and traffic guidance |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111413736.8ACN113823097A (en) | 2021-11-25 | 2021-11-25 | A system and method for early warning of highway accidents and traffic guidance |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113823097Atrue CN113823097A (en) | 2021-12-21 |
Family
ID=78918812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111413736.8APendingCN113823097A (en) | 2021-11-25 | 2021-11-25 | A system and method for early warning of highway accidents and traffic guidance |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113823097A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115116270A (en)* | 2022-07-07 | 2022-09-27 | 上海工物高技术产业发展有限公司 | Directional road traffic anti-collision early warning system and method |
| CN115233596A (en)* | 2022-06-21 | 2022-10-25 | 广西交科集团有限公司 | Networking joint control device for highway monitoring and early warning service |
| CN116537099A (en)* | 2023-04-06 | 2023-08-04 | 浙江高信技术股份有限公司 | An expressway telescopic guardrail and its control method |
| CN116704781A (en)* | 2023-05-31 | 2023-09-05 | 上海工物高技术产业发展有限公司 | Radar laser early warning system and light management method |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101783072A (en)* | 2009-12-23 | 2010-07-21 | 中国科学院自动化研究所 | Variable speed-limit system and method for recording vehicle overspeed violation |
| KR20110041614A (en)* | 2009-10-16 | 2011-04-22 | 주식회사 비츠로시스 | Vehicle accident judgment system inside the tunnel |
| CN206249579U (en)* | 2016-12-17 | 2017-06-13 | 山东交通学院 | A kind of early warning system for avoiding secondary traffic accident |
| CN108806331A (en)* | 2018-06-22 | 2018-11-13 | 安徽科力信息产业有限责任公司 | A kind of method and system for preventing highway secondary traffic accident |
| CN208506970U (en)* | 2018-05-25 | 2019-02-15 | 宁波诠航机械科技有限公司 | Mobile Early Warning cruising inspection system |
| CN110722574A (en)* | 2019-09-26 | 2020-01-24 | 山西省交通科技研发有限公司 | Intelligent monitoring and early warning robot for expressway and working method thereof |
| CN111785036A (en)* | 2020-06-23 | 2020-10-16 | 吉林大学 | A traffic emergency evacuation method for accident road sections based on UAV projection |
| CN112270834A (en)* | 2020-11-17 | 2021-01-26 | 永州职业技术学院 | Vehicle-road-people running method and system applied to 5G intelligent transportation means |
| CN212766538U (en)* | 2020-05-23 | 2021-03-23 | 长春大学 | Modularized foundation trolley running on waveform guardrail |
- 2021
- 2021-11-25CNCN202111413736.8Apatent/CN113823097A/enactivePending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110041614A (en)* | 2009-10-16 | 2011-04-22 | 주식회사 비츠로시스 | Vehicle accident judgment system inside the tunnel |
| CN101783072A (en)* | 2009-12-23 | 2010-07-21 | 中国科学院自动化研究所 | Variable speed-limit system and method for recording vehicle overspeed violation |
| CN206249579U (en)* | 2016-12-17 | 2017-06-13 | 山东交通学院 | A kind of early warning system for avoiding secondary traffic accident |
| CN208506970U (en)* | 2018-05-25 | 2019-02-15 | 宁波诠航机械科技有限公司 | Mobile Early Warning cruising inspection system |
| CN108806331A (en)* | 2018-06-22 | 2018-11-13 | 安徽科力信息产业有限责任公司 | A kind of method and system for preventing highway secondary traffic accident |
| CN110722574A (en)* | 2019-09-26 | 2020-01-24 | 山西省交通科技研发有限公司 | Intelligent monitoring and early warning robot for expressway and working method thereof |
| CN212766538U (en)* | 2020-05-23 | 2021-03-23 | 长春大学 | Modularized foundation trolley running on waveform guardrail |
| CN111785036A (en)* | 2020-06-23 | 2020-10-16 | 吉林大学 | A traffic emergency evacuation method for accident road sections based on UAV projection |
| CN112270834A (en)* | 2020-11-17 | 2021-01-26 | 永州职业技术学院 | Vehicle-road-people running method and system applied to 5G intelligent transportation means |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115233596A (en)* | 2022-06-21 | 2022-10-25 | 广西交科集团有限公司 | Networking joint control device for highway monitoring and early warning service |
| CN115116270A (en)* | 2022-07-07 | 2022-09-27 | 上海工物高技术产业发展有限公司 | Directional road traffic anti-collision early warning system and method |
| CN116537099A (en)* | 2023-04-06 | 2023-08-04 | 浙江高信技术股份有限公司 | An expressway telescopic guardrail and its control method |
| CN116704781A (en)* | 2023-05-31 | 2023-09-05 | 上海工物高技术产业发展有限公司 | Radar laser early warning system and light management method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113823097A (en) | A system and method for early warning of highway accidents and traffic guidance | |
| CN109615854B (en) | A traffic warning device and system | |
| CN112509343B (en) | Roadside type guiding method and system based on vehicle-road cooperation | |
| CN104008663B (en) | The warning of driving trace Intelligent Recognition and early warning system under low-visibility conditions | |
| CN107452231A (en) | Traffic accidents scene early warning robot | |
| CN206805800U (en) | People's car automatic early-warning system | |
| CN106097747B (en) | A kind of crossing anticollision intelligent signal lamp device and its control method | |
| CN113140129B (en) | Vehicle early warning method, device and system | |
| CN106530835A (en) | Road-sharp-corner-crossing smooth-traffic intelligence dispersion apparatus and method thereof | |
| CN112216111A (en) | Vehicle speed and distance early warning system and method based on microwave radar and video image | |
| CN110276948A (en) | A method and system for expressway safety driving warning | |
| CN113256979A (en) | Highway road condition information acquisition and early warning information publishing system | |
| CN112837546A (en) | A kind of highway fog guide layout method | |
| CN208156881U (en) | Highway second accident intelligent early-warning system | |
| WO2021169624A1 (en) | Non-motorized vehicle riding behavior-based intelligent prompt system and method, and non-motorized vehicle | |
| CN205881183U (en) | Crossing anticollision intelligence signal lamp device | |
| CN208954331U (en) | Pedestrian's street crossing system | |
| CN205632382U (en) | Intelligent automobile safety system | |
| CN219676717U (en) | Intersection vision blind area coming car warning device and system | |
| CN115631641B (en) | Intelligent display control method and device for intelligent lamp pole and intelligent lamp pole | |
| CN206431834U (en) | A kind of sharp road turn/abrupt slope suggestion device | |
| CN217157478U (en) | Early warning robot for preventing rear-end collision on highway | |
| CN219246203U (en) | Pedestrian crossing safety early warning device based on multi-source heterogeneous sensor | |
| CN113053098A (en) | Traffic intelligent dispatching road monitoring system based on internet of things technology | |
| CN116386383A (en) | Curve accident prevention warning system and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20211221 | |
| RJ01 | Rejection of invention patent application after publication |