CN113808438B - Vehicle queue control mode switching system and method based on neural network - Google Patents
Vehicle queue control mode switching system and method based on neural networkDownload PDFInfo
- Publication number
- CN113808438B CN113808438BCN202111101707.8ACN202111101707ACN113808438BCN 113808438 BCN113808438 BCN 113808438BCN 202111101707 ACN202111101707 ACN 202111101707ACN 113808438 BCN113808438 BCN 113808438B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- neural network
- data information
- current vehicle
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Computational Linguistics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于智能交通技术领域,具体涉及一种基于神经网络的车辆队列控制模式切换系统及切换方法。The invention belongs to the technical field of intelligent transportation, and in particular relates to a vehicle queue control mode switching system and switching method based on a neural network.
背景技术Background technique
在城市道路驾驶环境中,由于车辆无法提前预知前方车辆的动态变化(加速,减速和换道等),可能会导致车速控制不当,使得车辆队列不稳定的情况时有发生,这意味着更多的交通拥堵,大量的燃油浪费,甚至会引发交通事故,对人生命财产造成重大威胁。In the urban road driving environment, because the vehicle cannot predict the dynamic changes of the vehicle ahead (acceleration, deceleration and lane change, etc.), it may lead to improper speed control, making the vehicle queue unstable from time to time, which means more Traffic congestion, a lot of fuel waste, and even cause traffic accidents, posing a major threat to people's lives and property.
针对该问题,目前存在两种主要的技术:一种是基于车载传感器的自适应巡航控制(Adaptive Cruise Control,ACC),在ACC模式下的每辆车通过车载传感器测量其与前车的相对距离和相对速度信息,辅助驾驶员对车辆进行控制,有助于提高行车的安全性;另一种是基于车-车通信的协作式自适应巡航控制(Cooperative Adaptive Cruise Control,CACC),其通过车-车通信实现车辆的协同控制,相比于ACC模式,CACC模式能通过通信获得车辆队列中更多的车辆信息,从而进行控制器的设计,在保证车辆安全的前提下,车辆间以更小的车间距行驶,提高道路交通的吞吐量,减小车辆间距波动幅度,降低行车能耗,提高交通效率而对外部干扰的抑制能力也更强。In response to this problem, there are currently two main technologies: one is adaptive cruise control (Adaptive Cruise Control, ACC) based on on-board sensors. In ACC mode, each vehicle uses on-board sensors to measure its relative distance from the vehicle in front. and relative speed information to assist the driver in controlling the vehicle, which helps to improve driving safety; the other is the cooperative adaptive cruise control (CACC) based on vehicle-to-vehicle communication. - Vehicle communication realizes the coordinated control of vehicles. Compared with the ACC mode, the CACC mode can obtain more vehicle information in the vehicle queue through communication, so as to design the controller. It can improve the throughput of road traffic, reduce the fluctuation range of vehicle spacing, reduce driving energy consumption, improve traffic efficiency, and have a stronger ability to suppress external interference.
然而,在实际通信网络环境中,对于大规模车辆队列控制系统,通信延时的情况不可避免,对车辆的协同控制也造成了严重的影响。因此,当车辆队列中的车辆发生通信延时,如何设计巡航模式切换策略,使得车辆队列的串稳定性得到补偿,从而使车辆队列的间距不发生较大的波动,保证系统稳定安全运行是亟待解决的问题。However, in the actual communication network environment, for a large-scale vehicle platoon control system, the communication delay is inevitable, which also has a serious impact on the coordinated control of vehicles. Therefore, when the vehicles in the vehicle queue experience communication delay, how to design the cruise mode switching strategy so that the stability of the vehicle queue can be compensated, so that the distance between the vehicle queues does not fluctuate greatly, and it is urgent to ensure the stable and safe operation of the system. solved problem.
发明内容SUMMARY OF THE INVENTION
本发明的目的是为了解决通信延时影响车辆队列稳定性的问题,提出了一种基于神经网络的车辆队列控制模式切换系统及切换方法。The purpose of the present invention is to solve the problem that the communication delay affects the stability of the vehicle platoon, and proposes a vehicle platoon control mode switching system and switching method based on a neural network.
本发明的技术方案是:一种基于神经网络的车辆队列控制模式切换系统包括数据采集模块、数据处理模块和控制器切换模块;The technical scheme of the present invention is as follows: a neural network-based vehicle platoon control mode switching system includes a data acquisition module, a data processing module and a controller switching module;
数据采集模块用于接收当前车辆和前方车辆的数据信息;数据信息包括车辆的速度、水平位置坐标和垂直位置坐标;The data acquisition module is used to receive the data information of the current vehicle and the vehicle ahead; the data information includes the speed, horizontal position coordinates and vertical position coordinates of the vehicle;
数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;The data processing module is used to process the data information of the current vehicle and the preceding vehicle;
控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。The controller switching module is used for switching the control mode of the current vehicle according to the processed data information.
本发明的有益效果是:本发明的车辆队列控制模式切换系统可以使神经网络处理产生的数据信息更接近前方车辆的真实轨迹信息,并在从CACC控制器方式切换到ACC控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高了预测数据的准确性。The beneficial effects of the present invention are: the vehicle platoon control mode switching system of the present invention can make the data information generated by the neural network processing closer to the real trajectory information of the preceding vehicle, and when switching from the CACC controller mode to the ACC controller mode, the Each vehicle only accepts the data information of one vehicle ahead, thereby improving the accuracy of the predicted data.
在本发明实施例中,为了防止系统接收到的车辆行车信息中包含异常的数据,数据处理模块用于将雷达设备接收到的前车行车信息数据进行清洗,其次将清洗后的数据选取80%进行训练,20%进行测试放入到网络中进行训练。为了提高预测数据的准确性,选取了不同的输入参数进行试验。例如:分别将第一车辆的水平位置坐标、第二车辆的水平位置坐标和垂直位置坐标、第三车辆的水平位置坐标和垂直位置坐标以及车辆的行驶速度作为网络的输入参数,通过改变网络的内部结构,即从单影响变量到多影响变量的转换,进行多次的实验,同时记录每次实验的RMSE结果,选取结果值更优的输入情况作为网络的输入参数进行试验预测,使得通过网络处理产生的数据信息更接近前方车辆的真实行驶轨迹信息。In the embodiment of the present invention, in order to prevent the vehicle driving information received by the system from including abnormal data, the data processing module is used to clean the preceding vehicle driving information data received by the radar device, and then select 80% of the cleaned data. For training, 20% for testing is put into the network for training. In order to improve the accuracy of the predicted data, different input parameters were selected for experiments. For example: take the horizontal position coordinates of the first vehicle, the horizontal position coordinates and vertical position coordinates of the second vehicle, the horizontal position coordinates and vertical position coordinates of the third vehicle, and the driving speed of the vehicle as the input parameters of the network, respectively. The internal structure, that is, the conversion from single-influencing variables to multi-influencing variables, conducts multiple experiments, and records the RMSE results of each experiment at the same time, and selects the input situation with better result value as the input parameter of the network for experimental prediction, so that through the network The data information generated by the processing is closer to the real driving trajectory information of the preceding vehicle.
控制器切换模块,是当系统感知到车辆行驶的当前区域存在较大的信息延迟时,为了避免车辆队列的不稳定情况更加严重,系统将在头车巡航的阶段(此处不是立即切换),车辆队列中的车辆将采用神经网络输出的数据作为此时车辆的接收数据,替代了车辆前端雷达设备的接收数据。同时系统将采取由CACC控制器切换方式到ACC控制器方式,使得每一辆车只接受前方一辆车的数据信息,从而降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。The controller switching module is when the system senses that there is a large information delay in the current area where the vehicle is traveling, in order to avoid the instability of the vehicle queue from becoming more serious, the system will be in the stage of the leading vehicle cruising (this is not an immediate switch), The vehicles in the vehicle queue will use the data output by the neural network as the received data of the vehicle at this time, instead of the received data of the front-end radar equipment of the vehicle. At the same time, the system will switch from the CACC controller to the ACC controller, so that each vehicle only accepts the data information of one vehicle ahead, thereby reducing the system overhead of the vehicle during driving and improving the communication delay conditions. Lower vehicle queue stability.
基于以上系统,本发明还提出一种基于神经网络的车辆队列控制模式切换方法,包括以下步骤:Based on the above system, the present invention also proposes a method for switching vehicle platoon control mode based on neural network, comprising the following steps:
S1:利用数据采集模块采集当前车辆和前方车辆的数据信息,并利用深度学习法预测前方车辆的加速度;S1: Use the data acquisition module to collect the data information of the current vehicle and the vehicle ahead, and use the deep learning method to predict the acceleration of the vehicle ahead;
S2:根据当前车辆的数据信息、当前车辆的加速度、前方车辆的数据信息和前方车辆的加速度,利用控制器切换模块判断当前车辆的行驶区域的消息延迟是否超过阈值,若是进入步骤S3,否则进入步骤S4;S2: According to the data information of the current vehicle, the acceleration of the current vehicle, the data information of the preceding vehicle and the acceleration of the preceding vehicle, use the controller switching module to determine whether the message delay of the current vehicle's driving area exceeds the threshold value, if it is, go to step S3, otherwise go to step S4;
S3:利用神经网络模型预测当前车辆的数据信息,并将当前车辆的CACC模式切换至ACC模式,控制车辆的行驶轨迹,并进入步骤S5;S3: use the neural network model to predict the data information of the current vehicle, switch the CACC mode of the current vehicle to the ACC mode, control the driving trajectory of the vehicle, and go to step S5;
S4:继续接收前方车辆的数据信息,并进入步骤S5;S4: continue to receive data information of the vehicle ahead, and enter step S5;
S5:判断前方车辆和当前车辆的车头时距是否恒定,若是则完成车辆队列控制,否则返回步骤S1。S5: Determine whether the headway between the preceding vehicle and the current vehicle is constant, and if so, complete the vehicle platoon control, otherwise return to step S1.
进一步地,步骤S2中,判断当前车辆的行驶区域是否存在消息延迟的具体方法为:若当前车辆的响应信号和前方车辆的响应信号满足||Λi(t)||2≤||Λi-1(t)||2,
进一步地,步骤S3包括以下子步骤:Further, step S3 includes the following sub-steps:
S31:利用数据处理模块对前方车辆的数据信息进行清洗;S31: Use the data processing module to clean the data information of the vehicle ahead;
S32:选取清洗后前方车辆的数据信息的80%对神经网络模型进行训练,选取清洗后前方车辆的数据信息的20%对神经网络模型进行测试,得到神经网络模型的输出数据;S32: Select 80% of the data information of the front vehicle after cleaning to train the neural network model, select 20% of the data information of the front vehicle after cleaning to test the neural network model, and obtain the output data of the neural network model;
S33:将神经网络模型的输出数据作为当前车辆的数据信息,并将当前车辆的CACC模式切换至ACC模式。S33: Use the output data of the neural network model as the data information of the current vehicle, and switch the CACC mode of the current vehicle to the ACC mode.
进一步地,步骤S32中,对神经网络模型进行训练的具体方法为:将当前车辆的速度作为神经网络模型的第一输入参数,将当前车辆的速度和水平位置坐标作为神经网络模型的第二输入参数,将当前车辆的速度、水平位置坐标和垂直位置坐标作为神经网络模型的第三输入参数,分别计算第一输入参数、第二输入参数和第三输入参数的均方根误差,利用最小均方根误差对应的输入参数对神经网络模型进行训练。Further, in step S32, the specific method for training the neural network model is as follows: the speed of the current vehicle is used as the first input parameter of the neural network model, and the speed and horizontal position coordinates of the current vehicle are used as the second input of the neural network model. parameters, the speed, horizontal position coordinates and vertical position coordinates of the current vehicle are used as the third input parameters of the neural network model, and the root mean square errors of the first input parameter, the second input parameter and the third input parameter are calculated respectively, and the minimum mean square error is used. The input parameters corresponding to the square root error are used to train the neural network model.
本发明的有益效果是:本发明在通信延时条件下,基于神经网络预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。The beneficial effects of the present invention are: under the condition of communication delay, the present invention switches the control mode of the vehicle queue based on the neural network prediction method, reduces the system overhead of the vehicle during the driving process, and improves the communication delay condition. Stability of vehicle queues.
附图说明Description of drawings
图1为车辆队列控制模式切换方法的流程图;FIG. 1 is a flow chart of a vehicle platoon control mode switching method;
图2为串稳定性较差情况下的加速度曲线图;Fig. 2 is the acceleration curve diagram under the condition of poor string stability;
图3为串稳定性较好情况下的加速度曲线图;Fig. 3 is the acceleration curve diagram under the condition of good string stability;
图4为LSTM三层预测结构示意图;Figure 4 is a schematic diagram of the three-layer prediction structure of LSTM;
图5为车辆的加速度曲线图;Fig. 5 is the acceleration curve diagram of the vehicle;
图6为LSTM预测1秒后的加速度曲线图;Figure 6 is the acceleration curve after LSTM predicts 1 second;
图7为在ACC模式下LSTM预测1秒后的加速度曲线图。Figure 7 is a graph of the acceleration after 1 second of LSTM prediction in ACC mode.
具体实施方式Detailed ways
下面结合附图对本发明的实施例作进一步的说明。The embodiments of the present invention will be further described below with reference to the accompanying drawings.
在描述本发明的具体实施例之前,为使本发明的方案更加清楚完整,首先对本发明中出现的缩略语和关键术语定义进行说明:Before describing the specific embodiments of the present invention, in order to make the solution of the present invention clearer and more complete, the definitions of abbreviations and key terms that appear in the present invention are first described:
ACC模式:基于车载传感器的自适应巡航控制(Adaptive Cruise Control),在ACC模式下的每辆车通过车载传感器测量其与前车的相对距离和相对速度信息,辅助驾驶员对车辆进行控制,有助于提高行车的安全性。ACC mode: Adaptive Cruise Control based on on-board sensors, each vehicle in ACC mode measures its relative distance and relative speed information from the on-board sensor to the vehicle in front, and assists the driver in controlling the vehicle. Helps improve driving safety.
CACC:基于车-车通信的协作式自适应巡航控制(Cooperative Adaptive CruiseControl),其通过车-车通信实现车辆的协同控制。CACC: Cooperative Adaptive Cruise Control (Cooperative Adaptive Cruise Control) based on vehicle-to-vehicle communication, which realizes the cooperative control of vehicles through vehicle-to-vehicle communication.
本发明提供了一种基于神经网络的车辆队列控制模式切换系统,包括数据采集模块、数据处理模块和控制器切换模块;The invention provides a vehicle queue control mode switching system based on a neural network, comprising a data acquisition module, a data processing module and a controller switching module;
数据采集模块用于接收当前车辆和前方车辆的数据信息;数据信息包括车辆的速度、水平位置坐标和垂直位置坐标;The data acquisition module is used to receive the data information of the current vehicle and the vehicle ahead; the data information includes the speed, horizontal position coordinates and vertical position coordinates of the vehicle;
数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;The data processing module is used to process the data information of the current vehicle and the preceding vehicle;
控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。The controller switching module is used for switching the control mode of the current vehicle according to the processed data information.
基于以上系统,本发明还提出一种基于神经网络的车辆队列控制模式切换方法,如图1所示,包括以下步骤:Based on the above system, the present invention also proposes a method for switching vehicle queue control mode based on neural network, as shown in FIG. 1 , including the following steps:
S1:利用数据采集模块采集当前车辆和前方车辆的数据信息,并利用深度学习法预测前方车辆的加速度;S1: Use the data acquisition module to collect the data information of the current vehicle and the vehicle ahead, and use the deep learning method to predict the acceleration of the vehicle ahead;
S2:根据当前车辆的数据信息、当前车辆的加速度、前方车辆的数据信息和前方车辆的加速度,利用控制器切换模块判断当前车辆的行驶区域的消息延迟是否超过阈值,若是进入步骤S3,否则进入步骤S4;S2: According to the data information of the current vehicle, the acceleration of the current vehicle, the data information of the preceding vehicle and the acceleration of the preceding vehicle, use the controller switching module to determine whether the message delay of the current vehicle's driving area exceeds the threshold value, if it is, go to step S3, otherwise go to step S4;
S3:利用神经网络模型预测当前车辆的数据信息,并将当前车辆的CACC模式切换至ACC模式,控制车辆的行驶轨迹,并进入步骤S5;S3: use the neural network model to predict the data information of the current vehicle, switch the CACC mode of the current vehicle to the ACC mode, control the driving trajectory of the vehicle, and go to step S5;
S4:继续接收前方车辆的数据信息,并进入步骤S5;S4: continue to receive data information of the vehicle ahead, and enter step S5;
S5:判断前方车辆和当前车辆的车头时距是否恒定,若是则完成车辆队列控制,否则返回步骤S1。S5: Determine whether the headway between the preceding vehicle and the current vehicle is constant, and if so, complete the vehicle platoon control, otherwise return to step S1.
在本发明实施例中,步骤S2中,判断当前车辆的行驶区域是否存在消息延迟的具体方法为:若当前车辆的响应信号和前方车辆的响应信号满足||Λi(t)||2≤||Λi-1(t)||2,
在本发明实施例中,步骤S3包括以下子步骤:In this embodiment of the present invention, step S3 includes the following sub-steps:
S31:利用数据处理模块对前方车辆的数据信息进行清洗;S31: Use the data processing module to clean the data information of the vehicle ahead;
S32:选取清洗后前方车辆的数据信息的80%对神经网络模型进行训练,选取清洗后前方车辆的数据信息的20%对神经网络模型进行测试,得到神经网络模型的输出数据;S32: Select 80% of the data information of the front vehicle after cleaning to train the neural network model, select 20% of the data information of the front vehicle after cleaning to test the neural network model, and obtain the output data of the neural network model;
S33:将神经网络模型的输出数据作为当前车辆的数据信息,并将当前车辆的CACC模式切换至ACC模式。S33: Use the output data of the neural network model as the data information of the current vehicle, and switch the CACC mode of the current vehicle to the ACC mode.
在本发明实施例中,步骤S32中,对神经网络模型进行训练的具体方法为:将当前车辆的速度作为神经网络模型的第一输入参数,将当前车辆的速度和水平位置坐标作为神经网络模型的第二输入参数,将当前车辆的速度、水平位置坐标和垂直位置坐标作为神经网络模型的第三输入参数,分别计算第一输入参数、第二输入参数和第三输入参数的均方根误差,利用最小均方根误差对应的输入参数对神经网络模型进行训练。In the embodiment of the present invention, in step S32, the specific method for training the neural network model is as follows: the speed of the current vehicle is used as the first input parameter of the neural network model, and the speed and horizontal position coordinates of the current vehicle are used as the neural network model. The second input parameters of the current vehicle, the horizontal position coordinates and the vertical position coordinates of the current vehicle are used as the third input parameters of the neural network model, and the root mean square errors of the first input parameter, the second input parameter and the third input parameter are calculated respectively. , using the input parameters corresponding to the minimum root mean square error to train the neural network model.
在本发明实施例中,车辆动力学模型定义为Xi=(si,vi,ai)T,其中si,vi,ai分别代表第i辆车的位置、速度和加速度。采用线性纵向车辆动力学模型来制定后续车的动力学模型如下式所示。In the embodiment of the present invention, the vehicle dynamics model is defined as Xi =(si ,vi ,ai )T , where si ,vi ,ai represent the position, velocity and acceleration of thei -th vehicle, respectively. The linear longitudinal vehicle dynamics model is used to formulate the dynamics model of the subsequent vehicle as shown in the following formula.

其中,
串稳定性分析过程中,通常使用面向性能的频域方法,因为它具有用于控制器分析和合成的实用性特性,在这种方法中,串稳定性定义为头车或前车产生的动态扰动,如:加速度绕道,速度扰动和间距误差扰动,不能在想车辆队列上游方向传播是放大。它的数学表达式为:During string stability analysis, a performance-oriented frequency-domain approach is often used because of its useful properties for controller analysis and synthesis, in which string stability is defined as the dynamics generated by the leading or leading vehicle Disturbances, such as acceleration detours, velocity disturbances and spacing error disturbances, cannot be amplified in the upstream direction of the vehicle train. Its mathematical expression is:

该公式表示的含义为车辆信号中的能量必须在车队上游方向衰减。This formula means that the energy in the vehicle signal must decay in the direction upstream of the fleet.
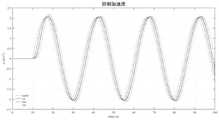
在本发明实施例中,采用Matlab绘画出车辆队列中每一辆车的行驶情况。为了清楚展示车辆队列串稳定性的情况,水平坐标为时间,纵坐标为车辆的加速度变化。设定车辆队列中有4辆车,每一辆车的行驶情况如图2和图3所示,图2为串稳定性较差情况的下加速度曲线图,图3为串稳定性较好情况的下加速度曲线图。In the embodiment of the present invention, the driving situation of each vehicle in the vehicle queue is drawn by using Matlab. In order to clearly show the stability of the vehicle platoon, the horizontal coordinate is time, and the vertical coordinate is the acceleration change of the vehicle. It is assumed that there are 4 vehicles in the vehicle queue, and the driving conditions of each vehicle are shown in Figure 2 and Figure 3. Figure 2 is the lower acceleration curve in the case of poor string stability, and Figure 3 is the case with good string stability. of the lower acceleration curve.
由图2和图3可以看出,在串稳定性不好的情况下,当前车产生扰动后,后面车辆并不会立即接收到前车的扰动信息,做出判断减少这种扰动。如图2所示,在15秒的时候,头车开始减速,然而其后车辆的加速度依旧在增加。由此,当车辆所处的区域有较大的信息延迟时,车辆队列的串稳定性受到较大影响,后面车辆并不能及时接收到头车产生的扰动信息,依旧会按照当前的行驶轨迹进行行驶,会造成车祸等情况发生。It can be seen from Figure 2 and Figure 3 that in the case of poor string stability, after the current vehicle is disturbed, the following vehicle does not immediately receive the disturbance information of the preceding vehicle, and makes a judgment to reduce the disturbance. As shown in Figure 2, at 15 seconds, the leading vehicle starts to decelerate, but the acceleration of the following vehicles is still increasing. Therefore, when there is a large information delay in the area where the vehicle is located, the stability of the vehicle queue will be greatly affected, and the following vehicles cannot receive the disturbance information generated by the leading vehicle in time, and will still drive according to the current driving trajectory. , which may cause a car accident, etc.
为了确保车辆队列的串稳定性,需要对车辆的接收信息进行控制。当系统感知到车辆行驶的当前区域存在较大的信息延迟时,将不再采用车辆前端的雷达设备收集的实时数据作为系统的输入,而是将预测数据作为系统的输入,控制车辆队列中车辆的行驶轨迹。In order to ensure the train stability of the vehicle queue, it is necessary to control the received information of the vehicles. When the system perceives that there is a large information delay in the current area where the vehicle is traveling, it will no longer use the real-time data collected by the radar equipment at the front of the vehicle as the input of the system, but use the predicted data as the input of the system to control the vehicles in the vehicle queue. 's driving trajectory.
因此,需要对前车的加速度进行预测。目前,可选的预测网络有:GRU、RNNs和LSTM。对比这三种网络的优缺点以及结合当前需求,最终选择LSTM进行前车加速度的预测。LSTM三层预测结构图如图4所示。Therefore, it is necessary to predict the acceleration of the preceding vehicle. Currently, optional prediction networks are: GRU, RNNs, and LSTM. Comparing the advantages and disadvantages of these three networks and combining the current requirements, LSTM is finally selected to predict the acceleration of the preceding vehicle. The three-layer prediction structure of LSTM is shown in Figure 4.
本实验首先在pycharm中绘制了车辆雷达收集的一段时间内前车的车辆加速度信息图像,图像的横坐标表示时间,纵坐标表示车辆行驶的加速度。并创建LSTM预测模型,调整参数,实验结果如下图5所示。In this experiment, firstly, the vehicle acceleration information image of the preceding vehicle collected by the vehicle radar for a period of time is drawn in pycharm. The abscissa of the image represents the time, and the ordinate represents the acceleration of the vehicle. And create an LSTM prediction model, adjust the parameters, and the experimental results are shown in Figure 5 below.
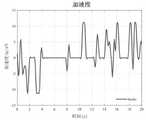
将车辆雷达收集到的数据放入到调整好的LSTM网络中进行训练,得到如图6所示的车辆动态轨迹图。由图6可以看出,通过预测网络得到车辆加速度信息,较为符合真实车辆的行车轨迹。The data collected by the vehicle radar is put into the adjusted LSTM network for training, and the vehicle dynamic trajectory diagram shown in Figure 6 is obtained. It can be seen from Figure 6 that the vehicle acceleration information obtained through the prediction network is more in line with the driving trajectory of the real vehicle.
由于CACC模式能通过通信获得车辆队列中更多的车辆信息,因此对于当前区域的通信网络也有一定的要求。而当车辆行驶的当前区域存在较大的信息延迟时,采用CACC控制器模式接收到的信息多为延迟信息,即使应用LSTM网络预测下一秒时刻的车辆轨迹信息,对维持车辆队列的稳定性也有不好的影响。因此,采用ACC模式进行控制。在ACC模式下利用LSTM网络预测的车辆加速度图像如图7所示。Since the CACC mode can obtain more vehicle information in the vehicle queue through communication, it also has certain requirements for the communication network in the current area. When there is a large information delay in the current area where the vehicle is traveling, the information received by the CACC controller mode is mostly delayed information. Even if the LSTM network is used to predict the vehicle trajectory information in the next second, it is very important to maintain the stability of the vehicle queue. There are also bad effects. Therefore, the ACC mode is used for control. The image of vehicle acceleration predicted by LSTM network in ACC mode is shown in Fig. 7.
通过图6和图7的车辆下一秒加速度预测数据图像可以看出,控制器由CACC模式转变为ACC模式,LSTM网络预测出的车辆的动态轨迹更加贴近真实的动态轨迹。It can be seen from the images of vehicle acceleration prediction data in the next second in Figure 6 and Figure 7 that the controller changes from CACC mode to ACC mode, and the dynamic trajectory of the vehicle predicted by the LSTM network is closer to the real dynamic trajectory.
本发明的工作原理及过程为:通信延时对协同式车辆队列的控制稳定性具有不利的影响,从而降低了车辆队列的安全性。本发明公开了一种基于神经网络预测的协同式车辆队列控制模式切换方法,从而实现车辆队列的间距不发生较大的波动。当车辆队列系统感知到当前交通环境使通信系统存在较大的信息延迟时,系统将在下游车辆处于巡航状态时,自动从CACC模式切换到ACC模式,而此时对前车加速度的判断将十分关键。为此,本发明采用LSTM对前车预测时域内的加速度进行预测,通过车辆前端装载的雷达设备获取车辆队列中前车的速度和位置等信息。将收集到的信息放进网络中,对收集的数据进行处理并对前车的加速度信息进行预测。本发明在通信延时条件下,基于LSTM预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。The working principle and process of the present invention are as follows: the communication delay has an adverse effect on the control stability of the coordinated vehicle platoon, thereby reducing the safety of the vehicle platoon. The invention discloses a cooperative vehicle platoon control mode switching method based on neural network prediction, so that the distance between the vehicle platoons does not fluctuate greatly. When the vehicle queuing system senses that the current traffic environment causes a large information delay in the communication system, the system will automatically switch from the CACC mode to the ACC mode when the downstream vehicle is in a cruising state, and at this time, the judgment of the acceleration of the preceding vehicle will be very important. The essential. To this end, the present invention uses LSTM to predict the acceleration of the preceding vehicle in the predicted time domain, and obtains information such as the speed and position of the preceding vehicle in the vehicle queue through the radar equipment mounted on the front end of the vehicle. The collected information is put into the network, the collected data is processed and the acceleration information of the preceding vehicle is predicted. Under the condition of communication delay, the invention switches the control mode of the vehicle platoon based on the LSTM prediction method, reduces the system overhead of the vehicle during the driving process, and improves the stability of the vehicle platoon under the condition of communication delay.
本发明的有益效果为:The beneficial effects of the present invention are:
(1)本发明的车辆队列控制模式切换系统可以使神经网络处理产生的数据信息更接近前方车辆的真实轨迹信息,并在从CACC控制器方式切换到ACC控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高了预测数据的准确性。(1) The vehicle queue control mode switching system of the present invention can make the data information generated by the neural network process closer to the real trajectory information of the vehicle ahead, and when switching from the CACC controller mode to the ACC controller mode, each vehicle Only the data information of a vehicle ahead is accepted, thereby improving the accuracy of the predicted data.
(2)本发明在通信延时条件下,基于神经网络预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。(2) Under the condition of communication delay, the present invention switches the control mode of the vehicle queue based on the method of neural network prediction, which reduces the system overhead of the vehicle during the driving process and improves the stability of the vehicle queue under the condition of communication delay. sex.
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。Those of ordinary skill in the art will appreciate that the embodiments described herein are intended to assist readers in understanding the principles of the present invention, and it should be understood that the scope of protection of the present invention is not limited to such specific statements and embodiments. Those skilled in the art can make various other specific modifications and combinations without departing from the essence of the present invention according to the technical teaching disclosed in the present invention, and these modifications and combinations still fall within the protection scope of the present invention.
Claims (4)
Translated fromChinese
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111101707.8ACN113808438B (en) | 2021-09-18 | 2021-09-18 | Vehicle queue control mode switching system and method based on neural network |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111101707.8ACN113808438B (en) | 2021-09-18 | 2021-09-18 | Vehicle queue control mode switching system and method based on neural network |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113808438A CN113808438A (en) | 2021-12-17 |
| CN113808438Btrue CN113808438B (en) | 2022-07-01 |
Family
ID=78895996
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111101707.8AActiveCN113808438B (en) | 2021-09-18 | 2021-09-18 | Vehicle queue control mode switching system and method based on neural network |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113808438B (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116386387B (en)* | 2023-04-19 | 2024-03-08 | 长安大学 | Method and device for predicting car-following behavior of mixed queues of human-driven vehicles |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109367537A (en)* | 2018-12-06 | 2019-02-22 | 吉林大学 | An adaptive cruise control system and method for electric vehicles based on the Internet of Vehicles |
| CN109591804A (en)* | 2018-11-22 | 2019-04-09 | 湖南大学 | Consider the vehicle platoon stability control method of communication delay |
| CN111469838A (en)* | 2020-04-22 | 2020-07-31 | 芜湖伯特利汽车安全系统股份有限公司 | Collaborative ACC/AEB decision management system based on Internet of vehicles and vehicle |
| JP2020144789A (en)* | 2019-03-08 | 2020-09-10 | スズキ株式会社 | Cruising controller for vehicle |
| CN113022585A (en)* | 2021-03-17 | 2021-06-25 | 武汉理工大学 | Heterogeneous multi-vehicle cooperative control method based on multi-source information topological communication system |
| CN113316123A (en)* | 2021-06-01 | 2021-08-27 | 温州大学 | CACC fleet abnormal vehicle detection method based on LTE-V2X |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12243429B2 (en)* | 2021-05-03 | 2025-03-04 | Intel Corporation | Cooperative adaptive cruise control (CACC) system for control of connected and autonomous vehicle (CAV) platoons |
- 2021
- 2021-09-18CNCN202111101707.8Apatent/CN113808438B/enactiveActive
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109591804A (en)* | 2018-11-22 | 2019-04-09 | 湖南大学 | Consider the vehicle platoon stability control method of communication delay |
| CN109367537A (en)* | 2018-12-06 | 2019-02-22 | 吉林大学 | An adaptive cruise control system and method for electric vehicles based on the Internet of Vehicles |
| JP2020144789A (en)* | 2019-03-08 | 2020-09-10 | スズキ株式会社 | Cruising controller for vehicle |
| CN111469838A (en)* | 2020-04-22 | 2020-07-31 | 芜湖伯特利汽车安全系统股份有限公司 | Collaborative ACC/AEB decision management system based on Internet of vehicles and vehicle |
| CN113022585A (en)* | 2021-03-17 | 2021-06-25 | 武汉理工大学 | Heterogeneous multi-vehicle cooperative control method based on multi-source information topological communication system |
| CN113316123A (en)* | 2021-06-01 | 2021-08-27 | 温州大学 | CACC fleet abnormal vehicle detection method based on LTE-V2X |
Non-Patent Citations (1)
| Title |
|---|
| 汽车自适应巡航系统的多模式切换控制;裴晓飞等;《机械工程学报》;20120520(第10期);第100-106页* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113808438A (en) | 2021-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106601002B (en) | Entrance ramp vehicle passing guiding system and method under Internet of vehicles environment | |
| CN109591812B (en) | Forward collision avoidance method and system for vehicle | |
| CN108986471B (en) | Intersection vehicle guiding method under mixed traffic condition | |
| CN111369813B (en) | A collaborative control method and system for ramp splitting and merging of intelligent networked vehicles | |
| CN110930697B (en) | Rule-based intelligent networked vehicle cooperative convergence control method | |
| CN108594812A (en) | A kind of intelligent vehicle smooth track planing method of structured road | |
| CN108665702B (en) | Construction road multistage early warning system and method based on vehicle-road cooperation | |
| CN110782650B (en) | Traffic flow distributed cooperative formation control method based on self-adaptive event triggering | |
| WO2016169290A1 (en) | Decision-making supporting system and method oriented towards emergency disposal of road traffic accidents | |
| CN107139919A (en) | For the self-protection method of vehicle anti-rear collision early warning, system and vehicle | |
| CN106218638A (en) | Intelligent network-connected automobile cooperative lane change control method | |
| CN111409639A (en) | A kind of main vehicle network cruise control method and system | |
| CN110745128A (en) | A vehicle forced deceleration system and control method based on minimum safety distance | |
| CN117864165B (en) | Early warning method based on intelligent vehicle monitoring | |
| CN113401118B (en) | Driving auxiliary system and method for predicting front vehicle braking | |
| van den Broek et al. | Advisory and autonomous cooperative driving systems | |
| CN113808438B (en) | Vehicle queue control mode switching system and method based on neural network | |
| WO2021147307A1 (en) | Vehicle adaptive cruise control method and apparatus | |
| CN110033617A (en) | A kind of train tracing model assessment system and method towards natural driving data | |
| CN115909780B (en) | Expressway merge control system and method based on intelligent network connection and RBF neural network | |
| CN110723143B (en) | Economical adaptive cruise control system and method suitable for multiple driving conditions | |
| CN116749969A (en) | Vehicle queue following distance control method based on driving working condition and road surface state | |
| CN1971655A (en) | Method for reducing traffic jam using intelligent traffic information | |
| CN102142195A (en) | Method for acquiring driving condition information of urban bus rapid transit | |
| CN115116245B (en) | Method and system for controlling dynamic sensing signal at intersection under mixed traffic environment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |