CN113780282A - Method and device for determining position of isocenter, computer equipment and readable storage medium - Google Patents
Method and device for determining position of isocenter, computer equipment and readable storage mediumDownload PDFInfo
- Publication number
- CN113780282A CN113780282ACN202111082112.2ACN202111082112ACN113780282ACN 113780282 ACN113780282 ACN 113780282ACN 202111082112 ACN202111082112 ACN 202111082112ACN 113780282 ACN113780282 ACN 113780282A
- Authority
- CN
- China
- Prior art keywords
- isocenter
- rack
- tested
- initial
- positions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Artificial Intelligence (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Computation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computational Linguistics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Evolutionary Biology (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Image Analysis (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本申请涉及医学设备的技术领域,特别是涉及一种等中心位置确定方法、装置、计算机设备和可读存储介质。The present application relates to the technical field of medical equipment, and in particular, to a method, apparatus, computer equipment and readable storage medium for determining an isocenter position.
背景技术Background technique
数字减影血管造影技术(Digital Subtraction Angiography,DSA)是一种X线成像系统。该系统在临床使用时,通常会基于平板探测器进行3D扫描和重建,并对3D扫描后的图像进行相应的处理。在3D扫描之前需要将C臂机与病床进行等中心定位,使得C臂机的旋转中心位于感兴趣的病灶部位。Digital Subtraction Angiography (DSA) is an X-ray imaging system. When the system is used clinically, 3D scanning and reconstruction are usually performed based on a flat panel detector, and the images after 3D scanning are processed accordingly. Before 3D scanning, it is necessary to perform isocenter positioning between the C-arm machine and the patient bed, so that the rotation center of the C-arm machine is located at the lesion of interest.
传统技术中,使用者通过操作C臂机,对C臂机的位置进行调整,以确定C臂机的等中心位置。然而,这样会增加使用者的工作量。In the conventional technology, the user adjusts the position of the C-arm by operating the C-arm to determine the isocenter position of the C-arm. However, this increases the workload of the user.
发明内容SUMMARY OF THE INVENTION
基于此,有必要针对上述技术问题,提供一种等中心位置确定方法、装置、计算机设备和可读存储介质。Based on this, it is necessary to provide an isocenter location determination method, apparatus, computer device and readable storage medium for the above technical problems.
第一方面,本申请一个实施例提供一种等中心位置确定方法,包括:In a first aspect, an embodiment of the present application provides a method for determining an isocenter position, including:
获取位置数据,其中,位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合;Obtaining position data, wherein the position data includes: the body position of the object, the position of the region of interest, and the set of positions of the rack to be tested;
将位置数据输入等中心位置确定模型,确定待测机架的等中心位置,其中,等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。Input the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested, wherein the isocenter position determination model is obtained by training the initial isocenter position determination model according to the collected position data sample set.
在其中一个实施例中,等中心位置确定方法还包括:In one of the embodiments, the isocenter position determination method further includes:
获取初始待测机架位置集合;Obtain the initial set of rack positions to be tested;
基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合。Based on the clustering algorithm, the initial set of rack positions to be tested is clustered to obtain the set of positions of the rack to be tested.
在其中一个实施例中,位置数据样本集包括:多个对象的体位样本、多个对象的感兴趣区域位置样本、多个对象的机架位置样本集合和等中心位置样本;In one of the embodiments, the position data sample set includes: body position samples of multiple subjects, region-of-interest position samples of multiple subjects, rack position sample sets of multiple subjects, and isocenter position samples;
以体位样本、感兴趣区域位置样本和机架位置样本集合为输入参数,以等中心位置样本为输出参数,对初始等中心位置确定模型进行训练,得到等中心位置确定模型。Taking body position samples, region of interest position samples and rack position sample sets as input parameters, and isocenter position samples as output parameters, the initial isocenter position determination model is trained, and the isocenter position determination model is obtained.
在其中一个实施例中,等中心位置确定方法还包括:In one of the embodiments, the isocenter position determination method further includes:
获取多个对象的初始机架位置样本集合;Get a sample set of initial rack positions for multiple objects;
基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合。Based on the clustering algorithm, the initial rack position sample set is clustered to obtain the rack position sample set.
在其中一个实施例中,待测机架位置集合中元素的数量与机架位置样本集合中元素的数量相同。In one embodiment, the number of elements in the set of rack positions to be tested is the same as the number of elements in the set of rack position samples.
在其中一个实施例中,等中心位置确定方法还包括:In one of the embodiments, the isocenter position determination method further includes:
控制待测机架移动至等中心位置;Control the rack to be tested to move to the isocenter position;
检验等中心位置是否准确。Verify that the isocenter position is accurate.
在其中一个实施例中,检验等中心位置是否准确,包括:In one embodiment, checking whether the isocenter position is accurate includes:
获取待测机架在至少两个不同的预设位置的拍摄图像,其中,拍摄图像中包括感兴趣区域位置;acquiring captured images of the rack to be tested at at least two different preset positions, wherein the captured images include the location of the region of interest;
判断感兴趣区域位置是否在拍摄图像的中心位置;Determine whether the position of the region of interest is in the center of the captured image;
若是,则确定等中心位置准确。If so, determine that the isocenter position is accurate.
第二方面,本申请一个实施例提供一种等中心位置确定装置,包括:In a second aspect, an embodiment of the present application provides a device for determining an isocenter position, including:
获取模块,用于获取位置数据,其中,位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合;an acquisition module for acquiring position data, wherein the position data includes: the body position of the object, the position of the region of interest, and a set of positions of the rack to be tested;
确定模块,用于将位置数据输入等中心位置确定模型,确定待测机架的等中心位置,其中,等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。The determination module is used to input the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested, wherein the isocenter position determination model is obtained by training the initial isocenter position determination model according to the collected position data sample set of.
第三方面,本申请一个实施例提供一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现如上述实施例提供的方法的步骤。In a third aspect, an embodiment of the present application provides a computer device, including a memory and a processor, the memory stores a computer program, and the processor implements the steps of the method provided by the foregoing embodiment when the processor executes the computer program.
第四方面,本申请一个实施例还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述实施例提供的方法的步骤。In a fourth aspect, an embodiment of the present application further provides a computer-readable storage medium on which a computer program is stored, and when the computer program is executed by a processor, implements the steps of the method provided by the foregoing embodiment.
本申请实施例提供一种等中心位置确定方法、装置、计算机设备和可读存储介质。该方法通过获取位置数据,将该位置数据输入等中心位置确定模型,确定待测机架的等中心位置。本申请实施例提供的等中心位置确定方法将获取的位置数据输入训练好的等中心位置确定模型中,就可以确定待测机架的等中心位置,无需使用者现场操作和调整,能够减少使用者的工作量,减少人力和物力的浪费。Embodiments of the present application provide an isocenter location determination method, apparatus, computer device, and readable storage medium. The method obtains the position data and inputs the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested. The isocenter position determination method provided by the embodiment of the present application inputs the acquired position data into the trained isocenter position determination model, and then the isocenter position of the rack to be tested can be determined, which does not require on-site operation and adjustment by the user, which can reduce the use of reduce the waste of manpower and material resources.
附图说明Description of drawings
为了更清楚地说明本申请实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域不同技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to more clearly illustrate the technical solutions in the embodiments of the present application or in the traditional technology, the following briefly introduces the accompanying drawings that are used in the description of the embodiments or the traditional technology. Obviously, the drawings in the following description are only the For some embodiments of the application, for those skilled in the art, other drawings can also be obtained according to these drawings without any creative effort.
图1为本申请一个实施例提供的等中心位置确定方法的步骤流程示意图;1 is a schematic flowchart of steps of a method for determining an isocenter position provided by an embodiment of the present application;
图2为本申请一个实施例提供的等中心位置确定方法的步骤流程示意图;2 is a schematic flowchart of steps of a method for determining an isocenter position provided by an embodiment of the present application;
图3为本申请一个实施例提供的等中心位置确定方法的步骤流程示意图;3 is a schematic flowchart of steps of a method for determining an isocenter position provided by an embodiment of the present application;
图4为本申请一个实施例提供的等中心位置确定方法的步骤流程示意图;4 is a schematic flowchart of steps of a method for determining an isocenter position provided by an embodiment of the present application;
图5为本申请一个实施例提供的等中心位置确定方法的步骤流程示意图;5 is a schematic flowchart of steps of a method for determining an isocenter position provided by an embodiment of the present application;
图6为本申请一个实施例提供的DSA设备的结构示意图;6 is a schematic structural diagram of a DSA device provided by an embodiment of the present application;
图7为本申请一个实施例提供的等中心位置确定装置的结构示意图;7 is a schematic structural diagram of an apparatus for determining an isocenter position provided by an embodiment of the present application;
图8为本申请一个实施例提供的计算机设备的结构示意图。FIG. 8 is a schematic structural diagram of a computer device according to an embodiment of the present application.
具体实施方式Detailed ways
为使本申请的上述目的、特征和优点能够更加明显易懂,下面结合附图对本申请的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本申请。但是本申请能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本申请内涵的情况下做类似改进,因此本申请不受下面公开的具体实施例的限制。In order to make the above objects, features and advantages of the present application more clearly understood, the specific embodiments of the present application will be described in detail below with reference to the accompanying drawings. In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present application. However, the present application can be implemented in many other ways different from those described herein, and those skilled in the art can make similar improvements without departing from the connotation of the present application. Therefore, the present application is not limited by the specific embodiments disclosed below.
数字减影血管造影技术(Digital Subtraction Angiography,DSA)是一种新的X线成像系统。该系统在临床使用时,通常会基于平板探测器进行3D扫描和重建,并对3D扫描后的图像进行相应的处理。在3D扫描之前需要将DSA设备中的C臂机与病床进行等中心定位,使得C臂机的旋转中心位于感兴趣的病灶部位。Digital Subtraction Angiography (Digital Subtraction Angiography, DSA) is a new X-ray imaging system. When the system is used clinically, 3D scanning and reconstruction are usually performed based on a flat panel detector, and the images after 3D scanning are processed accordingly. Before 3D scanning, it is necessary to perform isocenter positioning between the C-arm machine in the DSA equipment and the patient bed, so that the rotation center of the C-arm machine is located at the lesion of interest.
传统技术中,使用者通过手动操作C臂机到固定的位置进行扫描,根据扫描得到的图像调整C臂机进行等中心定位,使得C臂机的旋转中心位于感兴趣的病灶部位。然而,传统技术中进行等中心定位的方法会增加使用者的工作量,浪费人力和物力。并且,在进行等中心定位的过程中需要定位扫描,从而增加扫描对象接收的辐射,对扫描对象造成伤害。对此,本申请提供一种等中心位置确定方法。In the traditional technology, the user manually operates the C-arm to a fixed position for scanning, and adjusts the C-arm to perform isocenter positioning according to the scanned image, so that the rotation center of the C-arm is located at the lesion of interest. However, the method of performing isocenter positioning in the traditional technology increases the workload of the user and wastes manpower and material resources. In addition, positioning scanning is required in the process of isocenter positioning, thereby increasing the radiation received by the scanning object and causing damage to the scanning object. In this regard, the present application provides a method for determining an isocenter position.
本申请提供的等中心位置确定方法可以通过计算机设备实现。计算机设备包括但不限于控制芯片、个人计算机、笔记本电脑、智能手机、平板电脑和便携式可穿戴设备。本申请提供的方法可以通过JAVA软件实现,也可以应用于其他软件。The method for determining the isocenter position provided by the present application can be implemented by computer equipment. Computer equipment includes, but is not limited to, control chips, personal computers, notebook computers, smart phones, tablet computers, and portable wearable devices. The method provided in this application can be implemented by JAVA software, and can also be applied to other software.
下面以具体的实施例对本申请的技术方案以及本申请的技术方案如何解决技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本申请的实施例进行描述。The technical solution of the present application and how the technical solution of the present application solves the technical problem will be described in detail below with specific embodiments. The following specific embodiments may be combined with each other, and the same or similar concepts or processes may not be repeated in some embodiments. The embodiments of the present application will be described below with reference to the accompanying drawings.
请参见图1,本申请一个实施例提供一种等中心位置确定方法。本实施例以计算机设备为执行主体对等中心位置确定方法进行具体描述,该方法的步骤包括:Referring to FIG. 1 , an embodiment of the present application provides a method for determining an isocenter position. This embodiment specifically describes a method for determining the location of a peer-to-peer center with a computer device as the execution subject. The steps of the method include:
步骤100、获取位置数据,其中,位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合。Step 100: Acquire position data, wherein the position data includes: the body position of the object, the position of the region of interest, and the set of positions of the rack to be tested.
位置数据是指在对待扫描对象执行3D扫描确定感兴趣的病灶部位之前需要获取的相关数据。位置数据可以包括对象体位、感兴趣区域位置和待测机架位置集合。其中,对象体位是指待扫描对象在扫描时待扫描对象所处的状态;感兴趣区域位置是指待扫描对象中感兴趣区域的病灶的位置;待测机架位置集合是指使用待测机架执行3D扫描时,待测机架所处的各个位置数据组成的集合。位置数据可以预先存储在计算机设备的存储器中,计算机设备在执行等中心位置确定方法时,直接在存储器中获取即可。本实施例对获取位置数据的具体方法不作限制,只要能够实现其功能即可。Position data refers to relevant data that needs to be acquired before performing 3D scanning on the object to be scanned to determine the lesion site of interest. The position data may include the subject body position, the region of interest position, and the set of positions of the gantry to be tested. The position of the object refers to the state of the object to be scanned when the object to be scanned is scanned; the position of the region of interest refers to the position of the lesion in the region of interest in the object to be scanned; When the gantry performs 3D scanning, the set of data of each position where the gantry to be tested is located. The location data may be pre-stored in the memory of the computer device, and the computer device may directly acquire it in the memory when executing the method for determining the isocenter position. This embodiment does not limit the specific method for acquiring the location data, as long as the function can be realized.
步骤110、将位置数据输入等中心位置确定模型,确定待测机架的等中心位置,其中,等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。Step 110: Input the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested, wherein the isocenter position determination model is obtained by training the initial isocenter position determination model according to the collected position data sample set.
计算机设备在得到位置数据后,将该位置数据输入预先训练好的等中心位置确定模型,可以得到待测机架的等中心位置。其中,等中心位置确定模型是根据位置数据样本集对初始等中心位置确定模型进行训练得到的。位置数据样本集中包括多组位置数据样本,对每组位置数据样本的描述可以参考上述对位置数据的描述,在此不再赘述。初始等中心位置模型可以是是深度学习网络,本实施例对初始等中心位置确定模型的种类不作限制,只要能够实现其功能即可。在一个可选的实施例中,初始等中心位置确定模型为循环神经网络模型(RNN)。After the computer equipment obtains the position data, the position data is input into the pre-trained isocenter position determination model, and the isocenter position of the rack to be tested can be obtained. The isocenter position determination model is obtained by training the initial isocenter position determination model according to the position data sample set. The location data sample set includes multiple groups of location data samples. For the description of each group of location data samples, reference may be made to the above description of the location data, which will not be repeated here. The initial isocenter position model may be a deep learning network. This embodiment does not limit the type of the initial isocenter position determination model, as long as its function can be realized. In an optional embodiment, the initial isocenter position determination model is a recurrent neural network model (RNN).
本申请实施例提供的等中心位置确定方法通过获取位置数据,将该位置数据输入等中心位置确定模型,确定待测机架的等中心位置。本申请实施例提供的等中心位置确定方法将获取的位置数据输入训练好的等中心位置确定模型中,就可以确定待测机架的等中心位置,无需使用者现场操作和调整,能够减少使用者的工作量,减少人力和物力的浪费。并且,在确定等中心位置的过程中不会对待扫描对象进行扫描操作,能够减少待扫描对象接收的辐射。The isocenter position determination method provided by the embodiment of the present application determines the isocenter position of the rack to be tested by acquiring the position data and inputting the position data into the isocenter position determination model. The isocenter position determination method provided by the embodiment of the present application inputs the acquired position data into the trained isocenter position determination model, and then the isocenter position of the rack to be tested can be determined, which does not require on-site operation and adjustment by the user, which can reduce the use of reduce the waste of manpower and material resources. Moreover, in the process of determining the isocenter position, no scanning operation is performed on the object to be scanned, which can reduce the radiation received by the object to be scanned.
请参见图2,在一个实施例中,本申请提供的等中心位置确定方法的步骤还包括:Referring to FIG. 2, in one embodiment, the steps of the method for determining the isocenter position provided by the present application further include:
步骤200、获取初始待测机架位置集合。Step 200: Obtain an initial set of positions of the rack to be tested.
初始待测机架位置集合包括多个待测机架位置,每个待测机架位置可以是指待测机架的不同角度。计算机设备获取初始待测机架位置集合。初始待测机架位置集合可以预先存储在计算机设备的存储器中,计算机设备在需要时,直接在存储器中获取即可。本实施例对获取初始待测机架位置集合的具体方法不作限制,只要能够实现其功能即可。The initial set of rack positions to be tested includes a plurality of rack positions to be tested, and each rack position to be tested may refer to a different angle of the rack to be tested. The computer equipment obtains an initial set of rack positions to be tested. The initial set of rack positions to be tested can be pre-stored in the memory of the computer equipment, and the computer equipment can be directly acquired in the memory when needed. This embodiment does not limit the specific method for obtaining the initial rack position set to be tested, as long as its function can be realized.
步骤210、基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合。
计算机设备在获取初始待测机架位置集合后,利用聚类算法对初始待测机架位置集合中的所有初始待测机架位置进行聚类分析,得到待测机架位置集合。聚类算法可以包括系统聚类法、动态聚类法、模糊聚类法、图论聚类法和聚类预报法等,本实施例对利用的聚类算法的种类不作限制,只要能够实现其功能即可。通过利用聚类算法对初始待测机架位置集合中的所有初始待测机架位置进行聚类分析,可以将所有初始待测机架位置中相似性较高的分为同一聚类,从而可以得到具有代表性的多个聚类,根据多个聚类确定待测机架位置集合。待测机架位置集合中待测机架位置的数量与聚类的数量相同。本实施例对对初始待测机架位置集合进行聚类分析的具体过程不作限制,只要能够实现其功能即可。After acquiring the initial rack position set to be tested, the computer equipment uses a clustering algorithm to perform cluster analysis on all initial rack positions to be tested in the initial rack position set to be tested to obtain a rack position set to be tested. Clustering algorithms may include systematic clustering methods, dynamic clustering methods, fuzzy clustering methods, graph theory clustering methods, and clustering prediction methods, etc. This embodiment does not limit the types of clustering algorithms used, as long as the function. By using the clustering algorithm to perform cluster analysis on all the initial rack positions to be tested in the initial rack position set to be tested, all the initial rack positions to be tested with high similarity can be divided into the same cluster, so that it is possible to A plurality of representative clusters are obtained, and the position set of the rack to be tested is determined according to the plurality of clusters. The number of rack positions to be tested in the rack position set to be tested is the same as the number of clusters. This embodiment does not limit the specific process of performing cluster analysis on the initial set of rack positions to be tested, as long as the function can be realized.
在一个可选的实施例中,计算机设备可以将每个聚类中的聚类中心作为这个聚类对应的待测机架位置。In an optional embodiment, the computer device may use the cluster center in each cluster as the position of the rack to be tested corresponding to the cluster.
在本实施例中,通过对初始待测机架位置集合进行聚类,得到的待测机架位置集合。这样得到的待测机架位置集合中的待测机架位置的数量虽少,但是具有代表性。也就是说,小数量的待测机架位置也可以实现大数量的初始待测机架位置集合的功能。这样可以减小后续对待测机架位置集合进行计算时计算量,提高计算效率,即可以提高确定等中心位置的计算效率。In this embodiment, the set of positions of the rack to be tested is obtained by clustering the initial set of positions of the rack to be tested. Although the number of rack positions to be tested in the set of rack positions to be tested obtained in this way is small, it is representative. That is to say, a small number of rack positions to be tested can also implement the function of a large number of initial rack positions to be tested. In this way, the amount of calculation in the subsequent calculation of the position set of the rack to be tested can be reduced, and the calculation efficiency can be improved, that is, the calculation efficiency of determining the isocenter position can be improved.
在一个实施例中,位置数据样本集包括:多个对象的体位样本、多个对象的感兴趣区域位置样本、多个对象的机架位置样本集合和等中心位置样本。计算机设备对初始等中心位置确定模型训练的过程为:以体位样本、感兴趣区域位置样本和机架位置样本集合为输入参数,以等中心位置样本为输出参数,对初始等中心位置确定模型进行训练,得到等中心位置确定模型。In one embodiment, the set of position data samples includes: body position samples of the plurality of subjects, region of interest position samples of the plurality of subjects, a set of rack position samples of the plurality of subjects, and isocenter position samples. The process of training the initial isocenter position determination model by computer equipment is as follows: taking body position samples, region of interest position samples and rack position sample sets as input parameters, and taking isocenter position samples as output parameters, the initial isocenter position determination model is carried out. Train to get the isocenter location determination model.
位置数据样本集是指对不同的对象执行3D扫描时存储的位置数据样本,即历史数据。对于每个对象对应的位置数据样本包括体位样本、感兴趣区域位置样本、机架位置样本和等中心位置样本。将每个对象对应的位置数据样本中的体位样本、感兴趣区域位置样本和机架位置样本作为初始等中心位置确定模型的输入参数,将每个对象对应的位置数据样本中的等中心位置确定模型作为输出参数,对初始等中心确定模型进行有监督的训练,得到最终的等中心位置确定模型。也就是说,将体位样本、感兴趣区域位置样本和机架位置样本输入初始等中心确定模型中会得到初始等中心位置,将该初始等中心位置与等中心位置样本进行对比,根据对比结果调整初始等中心确定模型中的参数。获取新的位置数据样本重复上述训练的过程,直至初始等中心位置与等中心位置样本之间对比结果满足预设条件(初始等中心位置与等中心位置样本之间的相似程度大于或等于预设相似阈值,或者初始等中心位置与等中心位置样本之间的差异程度小于或等于预设差异阈值)后,可以得到训练好的等中心位置确定模型。The location data sample set refers to the location data samples stored when performing 3D scans on different objects, that is, historical data. The position data samples corresponding to each object include body position samples, region of interest position samples, rack position samples, and isocenter position samples. The body position sample, the region of interest position sample and the rack position sample in the position data sample corresponding to each object are used as the input parameters of the initial isocenter position determination model, and the isocenter position in the position data sample corresponding to each object is determined. The model is used as an output parameter to perform supervised training on the initial isocenter determination model to obtain the final isocenter location determination model. That is to say, inputting the body position sample, region of interest position sample, and rack position sample into the initial isocenter determination model will obtain the initial isocenter position, and then compare the initial isocenter position with the isocenter position sample, and adjust it according to the comparison result. The initial isocenter determines the parameters in the model. Obtain new position data samples and repeat the above training process until the comparison result between the initial isocenter position and the isocenter position sample satisfies the preset condition (the similarity between the initial isocenter position and the isocenter position sample is greater than or equal to the preset value) After the similarity threshold, or the degree of difference between the initial isocenter position and the isocenter position sample is less than or equal to the preset difference threshold), the trained isocenter position determination model can be obtained.
本申请实施例提供的训练等中心位置确定模型采用有监督的训练方式,可以提高训练效率。The training isocenter location determination model provided by the embodiment of the present application adopts a supervised training method, which can improve the training efficiency.
在一个可选的实施例中,在将位置数据输入等中心位置确定模型,确定待测机架的等中心位置后,将该位置数据和等中心位置作为位置数据样本对等中心位置确定模型进行优化训练,能够提高通过等中心位置确定模型确定待测机架的等中心位置的准确性。In an optional embodiment, after the position data is input into the isocenter position determination model, and the isocenter position of the rack to be tested is determined, the position data and the isocenter position are used as the position data samples to carry out the isocenter position determination model. Optimizing training can improve the accuracy of determining the isocenter position of the rack to be tested by the isocenter position determination model.
请参见图3,在一个实施例中,本申请提供的等中心位置确定方法的步骤还包括:Referring to FIG. 3, in one embodiment, the steps of the method for determining the isocenter position provided by the present application further include:
步骤300、获取多个对象的初始机架位置样本集合。Step 300: Obtain an initial rack position sample set of multiple objects.
对于每个对象,计算机设备获取初始机架位置样本集合,每个初始机架位置样本可以是指机架的不同角度。多个对象的初始机架位置样本集合可以预先存储在计算机设备的存储器中,计算机设备在需要时,直接在存储器中获取即可。本实施例对获取多个对象的初始机架位置集合的具体方法不作限制,只要能够实现其功能即可。For each object, the computer device obtains a set of initial gantry position samples, each initial gantry position sample may refer to a different angle of the gantry. The initial rack position sample set of the multiple objects may be pre-stored in the memory of the computer device, and the computer device can directly obtain it in the memory when needed. This embodiment does not limit the specific method for acquiring the initial rack position set of multiple objects, as long as the function can be realized.
步骤310、基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合。Step 310: Based on a clustering algorithm, perform clustering on the initial rack position sample set to obtain a rack position sample set.
计算机设备在获取每个对象的初始机架位置样本集合后,对于每个对象的初始机架位置样本集合进行聚类,可以得到每个对象的机架位置样本集合。对基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合的描述可以参考上述实施例中对基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合的具体描述,在此不再赘述。After acquiring the initial rack position sample set of each object, the computer equipment performs clustering on the initial rack position sample set of each object to obtain the rack position sample set of each object. For the description of clustering the initial rack position sample set based on the clustering algorithm to obtain the rack position sample set, please refer to the above-mentioned description of clustering the initial rack position set to be measured based on the clustering algorithm to obtain The specific description of the set of rack positions to be tested will not be repeated here.
在一个实施例中,待测机架位置集合中元素的数量与机架位置样本集合中元素的数量相同。待测机架位置集合中的元素是指待测机架位置集合中的待测机架所处的多个位置数据。机架位置样本集合中的元素是指机架样本所处的多个位置数据。待测机架位置集合中元素的数量是指输入等中心位置确定模型的待测机架的位置数据的数量。换句话说,在训练等中心位置确定模型时,该模型输入参数中的机架位置样本集合对应的向量长度与使用该模型时输入参数中的待测机架位置集合对应的向量长度一致,这样使用等中心位置确定模型才能够准确的确定位置数据对应的待测机架的等中心位置。In one embodiment, the number of elements in the set of rack positions to be tested is the same as the number of elements in the set of rack position samples. The elements in the rack position set to be tested refer to a plurality of position data where the rack under test in the rack position set to be tested is located. The elements in the rack position sample set refer to a plurality of position data at which the rack samples are located. The number of elements in the position set of the rack to be tested refers to the number of position data of the rack to be tested entered into the isocenter position determination model. In other words, when training the isocenter position determination model, the length of the vector corresponding to the sample set of rack positions in the input parameters of the model is the same as the length of the vector corresponding to the set of rack positions to be tested in the input parameters when using the model, so that Only by using the isocenter position determination model can the isocenter position of the rack to be tested corresponding to the position data be accurately determined.
请参见图4,在一个实施例中,本申请提供的等中心位置确定方法的步骤还包括:Referring to FIG. 4 , in one embodiment, the steps of the method for determining the isocenter position provided by the present application further include:
步骤400、控制待测机架移动至等中心位置。
步骤410、检验等中心位置是否准确。Step 410: Check whether the isocenter position is accurate.
计算机设备在确定待测机架的等中心位置后,控制该待测机架移动至确定的等中心位置处,对该等中心位置的准确性进行检验。本实施例对检验等中心位置的准确性的具体方法不作限制,只要能够实现其功能即可。After determining the isocenter position of the rack to be tested, the computer equipment controls the rack to be tested to move to the determined isocenter position, and checks the accuracy of the isocenter position. This embodiment does not limit the specific method for checking the accuracy of the isocenter position, as long as the function can be realized.
在本实施例中,在使用等中心位置模型确定待测机架的等中心位置后,增加了对该等中心位置进行检验的过程,这样可以确保在实际使用者最终确定的等中心位置的准确性。In this embodiment, after the isocenter position of the rack to be tested is determined by using the isocenter position model, a process of checking the isocenter position is added, which can ensure the accuracy of the isocenter position finally determined by the actual user. sex.
请参见图5,在一个实施例中,提出检验等中心位置是否准确的一种可能的实现方法,该方法的步骤包括:Referring to FIG. 5, in one embodiment, a possible implementation method for checking whether the isocenter position is accurate is proposed. The steps of the method include:
步骤500、获取待测机架在至少两个不同的预设位置的拍摄图像,其中,拍摄图像中包括感兴趣区域位置。Step 500: Acquire photographed images of the rack to be tested at at least two different preset positions, wherein the photographed images include the location of the region of interest.
计算机设备在控制待测机架移动至确定的等中心位置后,获取待测机架在至少两个不同的预设位置下对对象的拍摄图像。拍摄图像的数量与预设位置的数量相同。拍摄图像中包括感兴趣区域位置,即感兴趣的病灶位置。预设位置可以是指待测机架在等中心位置不变的情况下旋转不同的角度后的位置。示例性地,预设位置包括待测机架处于与地面垂直的状态和待测机架处于与地面水平的状态。本实施例对预设位置不作限制只要能够实现其功能即可。After the computer equipment controls the rack to be tested to move to the determined isocenter position, it acquires images of the object captured by the rack to be tested in at least two different preset positions. The number of captured images is the same as the number of preset positions. The captured image includes the location of the region of interest, that is, the location of the lesion of interest. The preset position may refer to the position of the rack to be tested rotated by different angles under the condition that the isocenter position remains unchanged. Exemplarily, the preset positions include a state where the rack to be tested is vertical to the ground and a state where the rack to be tested is horizontal to the ground. This embodiment does not limit the preset position as long as its function can be realized.
步骤510、判断感兴趣区域位置是否在拍摄图像的中心位置。Step 510: Determine whether the location of the region of interest is at the center of the captured image.
步骤520、若是,则确定等中心位置准确。Step 520: If yes, determine that the isocenter position is accurate.
计算机设备获取拍摄图像后,对拍摄图像中的感兴趣区域位置进行判断,确定感兴趣区域位置是否在拍摄图像的中心位置,即感兴趣区域位置距离拍摄图像的四周的位置是否相同。若计算机设备确定感兴趣区域位置在拍摄图像的中心位置,则确定待测机架的等中心位置准确。由于拍摄图像的数量有多个,则计算机设备只有在确定所有拍摄图像中的感兴趣区域位置在拍摄图像的中心位置时,才能确定等中心位置准确;若在拍摄图像中存在有感兴趣区域位置不在拍摄图像的中心位置,则确定等中心位置不准确。After acquiring the captured image, the computer device judges the position of the region of interest in the captured image to determine whether the position of the region of interest is in the center of the captured image, that is, whether the position of the region of interest is the same as the surrounding positions of the captured image. If the computer equipment determines that the location of the region of interest is at the center of the captured image, it is determined that the isocenter of the rack to be tested is accurate. Since there are multiple captured images, the computer equipment can only determine that the isocenter position is accurate when it determines that the position of the region of interest in all the captured images is at the center of the captured image; if there is a region of interest in the captured image If it is not at the center position of the captured image, the isocenter position is determined to be inaccurate.
本实施例提供的检验等中心位置是否准确的方法简单易懂,且容易操作。The method for checking whether the isocenter position is accurate provided in this embodiment is simple and easy to understand and easy to operate.
请参见图6,在一个可选的实施例中,DSA设备包括工作站21、控制台22、工控机23、第一显示器24、第二显示器25、第三显示器26、视频切换装置27、C臂机28和承载扫描对象的移动装置29。工作站21、控制台22和第二显示器24和第三显示器26均设置在控制室1中,C臂机28、第一显示器24和承载扫描对象的移动装置29均设置在手术室2中。DSA设备的工作流程为:通过工作站21执行上述实施例提供的等中心位置确定方法,确定C臂机28(待测机架)的等中心位置;工作站21通过控制台22和工控机23控制C臂机28移动至等中心位置,并对C臂机28进行旋转测试,确定C臂机28可以正常旋转;控制C臂机28实现对扫描对象的曝光和数据采集,采集到的数据通过工控机23传输至控制台22,控制台22会将该数据转换为图像通过视频切换装置27传送至第二显示器25,在第二显示器25上显示;并且同时控制台22会将该数据传输至工作站21,工作站21对该数据进行重建处理得到重建图像,并将该重建图像通过视频切换装置27传输至第三显示器26,在第三显示器26上显示;同时视频切换装置27会将控制台22和工作站21传输的图像传输至第一显示器24,在第一显示器24中显示。Referring to FIG. 6, in an optional embodiment, the DSA device includes a
应该理解的是,虽然图中的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。It should be understood that although the various steps in the flowchart in the figures are sequentially shown in the order indicated by the arrows, these steps are not necessarily executed in sequence in the order indicated by the arrows. Unless explicitly stated herein, the execution of these steps is not strictly limited to the order, and these steps may be performed in other orders. Moreover, at least a part of the steps in the figure may include multiple sub-steps or multiple stages. These sub-steps or stages are not necessarily executed and completed at the same time, but may be executed at different times. The execution sequence of these sub-steps or stages It is also not necessarily performed sequentially, but may be performed alternately or alternately with other steps or at least a portion of sub-steps or stages of other steps.
请参见图7,本申请一个实施例提供一种等中心位置确定装置10,该装置包括获取模块11和确定模块12。其中,Referring to FIG. 7 , an embodiment of the present application provides an apparatus 10 for determining an isocenter position. The apparatus includes an
获取模块11用于获取位置数据,其中位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合。The obtaining
确定模块12用于将位置数据输入等中心位置确定模型,确定待测机架的等等中心位置,其中,所等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。The
在一个实施例中,等中心确定装置10还包括第一获取单元和第二确定单元。第一获取单元用于获取初始待测机架位置集合;第一确定单元用于基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合。In one embodiment, the isocenter determining apparatus 10 further includes a first acquiring unit and a second determining unit. The first obtaining unit is configured to obtain the initial set of rack positions to be tested; the first determination unit is configured to cluster the initial set of rack positions to be tested based on a clustering algorithm to obtain the set of positions of the rack to be tested.
在一个实施例中,位置数据样本集包括:多个对象的体位样本、多个对象的感兴趣区域位置样本、多个对象的机架位置样本集合和等中心位置样本;以体位样本、感兴趣区域位置样本和机架位置样本集合为输入参数,以等中心位置样本为输出参数,对初始等中心位置确定模型进行训练,得到等中心位置确定模型。In one embodiment, the position data sample set includes: body position samples of a plurality of subjects, region-of-interest position samples of a plurality of subjects, a rack position sample set of a plurality of subjects, and isocenter position samples; The set of regional location samples and rack location samples are used as input parameters, and the isocenter location samples are used as output parameters to train the initial isocenter location determination model to obtain the isocenter location determination model.
在一个实施例中,等中心位置确定装置10还包括第二获取单元和第二确定单元。第二获取单元用于获取多个对象的初始机架位置样本集合;第二确定单元用于基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合。In one embodiment, the isocenter position determining apparatus 10 further includes a second acquiring unit and a second determining unit. The second acquiring unit is used for acquiring the initial rack position sample set of the multiple objects; the second determining unit is used for clustering the initial rack position sample set based on the clustering algorithm to obtain the rack position sample set.
在一个实施例中,待测机架位置集合中元素的数量与所述机架位置样本集合中元素的数量相同。In one embodiment, the number of elements in the set of rack positions to be tested is the same as the number of elements in the set of rack position samples.
在一个实施例中,等中心确定装置10还包括控制单元和检验单元。控制单元用于控制待测机架移动至等中心位置;检验单元用于检验等中心位置是否准确。In one embodiment, the isocenter determination device 10 further includes a control unit and a checking unit. The control unit is used to control the rack to be tested to move to the isocenter position; the inspection unit is used to check whether the isocenter position is accurate.
在一个实施例中,检验单元具体用于获取待测机架在至少两个不同的预设位置的拍摄图像,其中,拍摄图像中包括感兴趣区域位置;判断感兴趣区域位置是否在拍摄图像的中心位置;若在,则确定等中心位置准确。In one embodiment, the inspection unit is specifically configured to acquire captured images of the rack to be tested at at least two different preset positions, wherein the captured images include the position of the region of interest; determine whether the position of the region of interest is within the range of the captured image. Center position; if so, confirm that the isocenter position is accurate.
关于等中心位置确定装置10的具体限定可以参见上文中对于等中心位置确定方法的限定,在此不在赘述。等中心位置确定装置10中的各个模块可以全部或部分通过软件、硬件及其组合来实现。上述各装置、各模块或者各单元可以以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个装置或模块对应的操作。For the specific definition of the isocenter position determination apparatus 10, reference may be made to the above definition of the isocenter position determination method, which will not be repeated here. Each module in the isocenter position determining apparatus 10 may be implemented in whole or in part by software, hardware, and combinations thereof. The above devices, modules or units can be embedded in or independent of the processor in the computer equipment in the form of hardware, or can be stored in the memory in the computer equipment in the form of software, so that the processor can call and execute the above devices. or the corresponding operation of the module.
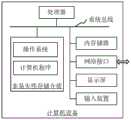
请参见图8,在一个实施例中,提供了一种计算机设备,计算机设备可以是服务器,其内部结构图可以如图8所示。计算机设备包括通过系统总线连接的处理器、存储器、网络接口和数据库。其中,计算机设备的处理器用于提供计算和控制能力。计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。计算机设备的数据库用于存储位置数据和位置数据样本集等。计算机设备的网络接口用于与外部的终端通过网络连接通信。计算机设备被处理器执行时以实现一种等中心位置确定方法。Referring to FIG. 8 , in one embodiment, a computer device is provided. The computer device may be a server, and its internal structure diagram may be as shown in FIG. 8 . Computer equipment includes a processor, memory, network interface, and database connected by a system bus. Among them, the processor of the computer device is used to provide computing and control capabilities. The memory of a computer device includes non-volatile storage media, internal memory. The nonvolatile storage medium stores an operating system, a computer program, and a database. The internal memory provides an environment for the execution of the operating system and computer programs in the non-volatile storage medium. Databases of computer equipment are used to store location data and location data sample sets, among others. The network interface of the computer equipment is used to communicate with external terminals through a network connection. A computer device when executed by a processor implements an isocenter location determination method.
本领域技术人员可以理解,图8中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。Those skilled in the art can understand that the structure shown in FIG. 8 is only a block diagram of a part of the structure related to the solution of the present application, and does not constitute a limitation on the computer equipment to which the solution of the present application is applied. Include more or fewer components than shown in the figures, or combine certain components, or have a different arrangement of components.
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,处理器执行计算机程序时实现以下步骤:In one embodiment, a computer device is provided, including a memory and a processor, a computer program is stored in the memory, and the processor implements the following steps when executing the computer program:
获取位置数据,其中,位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合;Obtaining position data, wherein the position data includes: the body position of the object, the position of the region of interest, and the set of positions of the rack to be tested;
将位置数据输入等中心位置确定模型,确定待测机架的等中心位置,其中,等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。Input the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested, wherein the isocenter position determination model is obtained by training the initial isocenter position determination model according to the collected position data sample set.
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取初始待测机架位置集合;基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合。In one embodiment, when the processor executes the computer program, the following steps are further implemented: obtaining an initial set of rack positions to be tested; based on a clustering algorithm, clustering the initial set of rack positions to be tested to obtain a set of rack positions to be tested .
在一个实施例中,处理器执行计算机程序时还实现以下步骤:位置数据样本集包括:多个对象的体位样本、多个对象的感兴趣区域位置样本、多个对象的机架位置样本集合和等中心位置样本;以体位样本、感兴趣区域位置样本和机架位置样本集合为输入参数,以等中心位置样本为输出参数,对初始等中心位置确定模型进行训练,得到等中心位置确定模型。In one embodiment, the processor further implements the following steps when executing the computer program: the set of position data samples includes: body position samples of a plurality of subjects, region-of-interest position samples of a plurality of subjects, a set of rack position samples of a plurality of subjects, and Isocenter position samples; take body position samples, region of interest position samples and rack position sample sets as input parameters, and isocenter position samples as output parameters, train the initial isocenter position determination model, and obtain the isocenter position determination model.
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取多个对象的初始机架位置样本集合;基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合。In one embodiment, the processor further implements the following steps when executing the computer program: acquiring an initial rack position sample set of a plurality of objects; clustering the initial rack position sample set based on a clustering algorithm to obtain rack position samples gather.
在一个实施例中,处理器执行计算机程序时还实现以下步骤:待测机架位置集合中元素的数量与机架位置样本集合中元素的数量相同。In one embodiment, the processor further implements the following steps when executing the computer program: the number of elements in the set of rack positions to be tested is the same as the number of elements in the set of rack position samples.
在一个实施例中,处理器执行计算机程序时还实现以下步骤:控制待测机架移动至等中心位置;检验等中心位置是否准确。In one embodiment, when the processor executes the computer program, the following steps are further implemented: controlling the rack to be tested to move to the isocenter position; and checking whether the isocenter position is accurate.
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取待测机架在至少两个不同的预设位置的拍摄图像,其中,拍摄图像中包括感兴趣区域位置;判断感兴趣区域位置是否在拍摄图像的中心位置;若是,则确定等中心位置准确。In one embodiment, the processor further implements the following steps when executing the computer program: acquiring captured images of the rack to be tested at at least two different preset positions, wherein the captured images include the location of the region of interest; determining the region of interest Whether the position is in the center of the captured image; if so, confirm that the isocenter position is accurate.
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:In one embodiment, a computer-readable storage medium is provided on which a computer program is stored, and when the computer program is executed by a processor, the following steps are implemented:
获取位置数据,其中,位置数据包括:对象体位、感兴趣区域位置和待测机架位置集合;Obtaining position data, wherein the position data includes: the body position of the object, the position of the region of interest, and the set of positions of the rack to be tested;
将位置数据输入等中心位置确定模型,确定待测机架的等中心位置,其中,等中心位置确定模型是根据采集的位置数据样本集对初始等中心位置确定模型进行训练得到的。Input the position data into the isocenter position determination model to determine the isocenter position of the rack to be tested, wherein the isocenter position determination model is obtained by training the initial isocenter position determination model according to the collected position data sample set.
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取初始待测机架位置集合;基于聚类算法,对初始待测机架位置集合进行聚类,得到待测机架位置集合。In one embodiment, when the computer program is executed by the processor, the following steps are further implemented: obtaining an initial set of rack positions to be tested; based on a clustering algorithm, clustering the initial set of rack positions to be tested to obtain the position of the rack to be tested gather.
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:位置数据样本集包括:多个对象的体位样本、多个对象的感兴趣区域位置样本、多个对象的机架位置样本集合和等中心位置样本;以体位样本、感兴趣区域位置样本和机架位置样本集合为输入参数,以等中心位置样本为输出参数,对初始等中心位置确定模型进行训练,得到等中心位置确定模型。In one embodiment, the computer program further implements the following steps when executed by the processor: the position data sample set includes: body position samples of a plurality of subjects, region-of-interest position samples of a plurality of subjects, a set of rack position samples of a plurality of subjects and isocenter location samples; take body position samples, region of interest location samples and rack location sample sets as input parameters, and isocenter location samples as output parameters, train the initial isocenter location determination model, and obtain the isocenter location determination model .
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取多个对象的初始机架位置样本集合;基于聚类算法,对初始机架位置样本集合进行聚类,得到机架位置样本集合。In one embodiment, when the computer program is executed by the processor, the following steps are further implemented: acquiring an initial rack position sample set of a plurality of objects; based on a clustering algorithm, clustering the initial rack position sample set to obtain the rack position sample collection.
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:待测机架位置集合中元素的数量与机架位置样本集合中元素的数量相同。In one embodiment, the computer program further implements the following steps when executed by the processor: the number of elements in the set of rack positions to be tested is the same as the number of elements in the set of rack position samples.
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:控制待测机架移动至等中心位置;检验等中心位置是否准确。In one embodiment, when the computer program is executed by the processor, the following steps are further implemented: controlling the rack to be tested to move to the isocenter position; and checking whether the isocenter position is accurate.
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取待测机架在至少两个不同的预设位置的拍摄图像,其中,拍摄图像中包括感兴趣区域位置;判断感兴趣区域位置是否在拍摄图像的中心位置;若是,则确定等中心位置准确。In one embodiment, when the computer program is executed by the processor, the following steps are further implemented: acquiring captured images of the rack to be tested at at least two different preset positions, wherein the captured images include the location of the region of interest; Whether the area position is in the center of the captured image; if so, confirm that the isocenter position is accurate.
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink)DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。Those of ordinary skill in the art can understand that all or part of the processes in the methods of the above embodiments can be implemented by instructing relevant hardware through a computer program, and the computer program can be stored in a non-volatile computer-readable storage In the medium, when the computer program is executed, it may include the processes of the above-mentioned method embodiments. Wherein, any reference to memory, storage, database or other medium used in the various embodiments provided in this application may include non-volatile and/or volatile memory. Nonvolatile memory may include read only memory (ROM), programmable ROM (PROM), electrically programmable ROM (EPROM), electrically erasable programmable ROM (EEPROM), or flash memory. Volatile memory may include random access memory (RAM) or external cache memory. By way of illustration and not limitation, RAM is available in various forms such as static RAM (SRAM), dynamic RAM (DRAM), synchronous DRAM (SDRAM), double data rate SDRAM (DDRSDRAM), enhanced SDRAM (ESDRAM), synchronous chain Road (Synchlink) DRAM (SLDRAM), memory bus (Rambus) direct RAM (RDRAM), direct memory bus dynamic RAM (DRDRAM), and memory bus dynamic RAM (RDRAM), etc.
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。The technical features of the above embodiments can be combined arbitrarily. In order to make the description simple, all possible combinations of the technical features in the above embodiments are not described. However, as long as there is no contradiction in the combination of these technical features It is considered to be the range described in this specification.
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。The above-mentioned embodiments only represent several embodiments of the present application, and the descriptions thereof are relatively specific and detailed, but should not be construed as a limitation on the scope of the patent of the present application. It should be pointed out that for those skilled in the art, without departing from the concept of the present application, several modifications and improvements can be made, which all belong to the protection scope of the present application. Therefore, the scope of protection of the patent of the present application shall be subject to the appended claims.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111082112.2ACN113780282B (en) | 2021-09-15 | 2021-09-15 | Isocenter location determination method, device, computer equipment and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111082112.2ACN113780282B (en) | 2021-09-15 | 2021-09-15 | Isocenter location determination method, device, computer equipment and readable storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113780282Atrue CN113780282A (en) | 2021-12-10 |
| CN113780282B CN113780282B (en) | 2024-03-26 |
Family
ID=78844121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111082112.2AActiveCN113780282B (en) | 2021-09-15 | 2021-09-15 | Isocenter location determination method, device, computer equipment and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113780282B (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106344053A (en)* | 2016-09-09 | 2017-01-25 | 上海联影医疗科技有限公司 | Imaging method and positioning device of X-ray imaging equipment |
| CN107320858A (en)* | 2017-06-16 | 2017-11-07 | 苏州雷泰医疗科技有限公司 | A kind of dual intensity accelerator therapy device and its control method |
| US20200258243A1 (en)* | 2019-02-07 | 2020-08-13 | Siemens Healthcare Gmbh | Dense Body Marker Estimation from Camera Data for Patient Positioning in Medical Imaging |
| CN112438718A (en)* | 2019-08-27 | 2021-03-05 | 西门子医疗有限公司 | Method for positioning an examination table, magnetic resonance apparatus, program product and data carrier |
| CN112568891A (en)* | 2019-09-27 | 2021-03-30 | 西门子医疗有限公司 | Method for automatically positioning a region of a patient to be examined for a medical imaging examination and medical imaging device designed for carrying out the method |
| EP3839890A1 (en)* | 2019-12-17 | 2021-06-23 | Metamorphosis GmbH | Determining relative 3d positions and orientations between objects in 2d medical images |
| WO2021129325A1 (en)* | 2019-12-25 | 2021-07-01 | 飞依诺科技(苏州)有限公司 | Ultrasonic image lesion segmentation method and apparatus, and computer device |
- 2021
- 2021-09-15CNCN202111082112.2Apatent/CN113780282B/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106344053A (en)* | 2016-09-09 | 2017-01-25 | 上海联影医疗科技有限公司 | Imaging method and positioning device of X-ray imaging equipment |
| CN107320858A (en)* | 2017-06-16 | 2017-11-07 | 苏州雷泰医疗科技有限公司 | A kind of dual intensity accelerator therapy device and its control method |
| US20200258243A1 (en)* | 2019-02-07 | 2020-08-13 | Siemens Healthcare Gmbh | Dense Body Marker Estimation from Camera Data for Patient Positioning in Medical Imaging |
| CN111557665A (en)* | 2019-02-07 | 2020-08-21 | 西门子医疗有限公司 | Dense Body Marker Estimation from Camera Data for Patient Localization in Medical Imaging |
| CN112438718A (en)* | 2019-08-27 | 2021-03-05 | 西门子医疗有限公司 | Method for positioning an examination table, magnetic resonance apparatus, program product and data carrier |
| CN112568891A (en)* | 2019-09-27 | 2021-03-30 | 西门子医疗有限公司 | Method for automatically positioning a region of a patient to be examined for a medical imaging examination and medical imaging device designed for carrying out the method |
| EP3839890A1 (en)* | 2019-12-17 | 2021-06-23 | Metamorphosis GmbH | Determining relative 3d positions and orientations between objects in 2d medical images |
| WO2021129325A1 (en)* | 2019-12-25 | 2021-07-01 | 飞依诺科技(苏州)有限公司 | Ultrasonic image lesion segmentation method and apparatus, and computer device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113780282B (en) | 2024-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109754447B (en) | Image generation method, device, equipment and storage medium | |
| CN111080584B (en) | Quality control method for medical image, computer device and readable storage medium | |
| WO2021135773A1 (en) | Image reconstruction method, apparatus, device, and system, and computer readable storage medium | |
| CN111932520A (en) | Medical image display method, viewing device and computer device | |
| CN109697740A (en) | Image rebuilding method, device and computer equipment | |
| US12056890B2 (en) | Method for measuring volume of organ by using artificial neural network, and apparatus therefor | |
| CN110084868B (en) | Image correction method, device, computer equipment and readable storage medium | |
| KR20190103816A (en) | Method and apparatus for correcting the computed tomographic image | |
| US20200065945A1 (en) | Defective Pixel Correction Using Adversarial Networks | |
| CN109567852B (en) | Method for determining scanning range, method, device and equipment for acquiring medical image | |
| US11380026B2 (en) | Method and device for obtaining predicted image of truncated portion | |
| CN111488872A (en) | Image detection method, image detection device, computer equipment and storage medium | |
| CN109308488A (en) | Breast ultrasound image processing device, method, computer equipment and storage medium | |
| CN111951272A (en) | Brain image segmentation method, device, computer equipment and readable storage medium | |
| CN107252353B (en) | Control method of medical imaging equipment and medical imaging equipment | |
| CN110852384A (en) | Medical image quality detection method, device and storage medium | |
| CN113962938A (en) | Image segmentation method and device, computer equipment and readable storage medium | |
| CN117173271A (en) | CT image processing method, model training method, device, medium and product | |
| CN115375840A (en) | Image reconstruction method, device, system, computer equipment and storage medium | |
| CN113780282B (en) | Isocenter location determination method, device, computer equipment and readable storage medium | |
| US11461940B2 (en) | Imaging method and device | |
| WO2023283765A1 (en) | Method and apparatus for training machine learning models, computer device, and storage medium | |
| CN111991016A (en) | Image acquisition parameter acquisition method, device, equipment, system and storage medium | |
| CN111084633A (en) | X-ray equipment, X-ray data processing method and device, equipment and medium | |
| CN116869555A (en) | Scanning protocol adjusting method, device and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |