CN113382382B - A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization Strategy - Google Patents
A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization StrategyDownload PDFInfo
- Publication number
- CN113382382B CN113382382BCN202110642777.8ACN202110642777ACN113382382BCN 113382382 BCN113382382 BCN 113382382BCN 202110642777 ACN202110642777 ACN 202110642777ACN 113382382 BCN113382382 BCN 113382382B
- Authority
- CN
- China
- Prior art keywords
- node
- vehicle
- neighbor
- forwarding
- nodes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription116
- 238000005457optimizationMethods0.000titleclaimsabstractdescription16
- 238000004891communicationMethods0.000claimsabstractdescription16
- 238000004088simulationMethods0.000claimsabstractdescription8
- 239000011159matrix materialSubstances0.000claimsdescription27
- 230000033001locomotionEffects0.000claimsdescription23
- 230000008569processEffects0.000claimsdescription23
- 238000005259measurementMethods0.000claimsdescription18
- 230000000694effectsEffects0.000claimsdescription17
- 235000008694Humulus lupulusNutrition0.000claimsdescription15
- 238000004364calculation methodMethods0.000claimsdescription10
- 230000001788irregularEffects0.000claimsdescription10
- 230000005540biological transmissionEffects0.000claimsdescription9
- 230000006399behaviorEffects0.000claimsdescription6
- 238000010276constructionMethods0.000claimsdescription6
- 238000012937correctionMethods0.000claimsdescription6
- 230000002093peripheral effectEffects0.000claimsdescription6
- 230000008054signal transmissionEffects0.000claimsdescription6
- 230000008859changeEffects0.000claimsdescription5
- 238000013507mappingMethods0.000claimsdescription3
- 238000011160researchMethods0.000claimsdescription3
- 230000000739chaotic effectEffects0.000claimsdescription2
- 238000013461designMethods0.000claimsdescription2
- 230000007812deficiencyEffects0.000abstractdescription3
- 238000010586diagramMethods0.000description3
- 230000008901benefitEffects0.000description2
- 230000002457bidirectional effectEffects0.000description2
- 230000001934delayEffects0.000description2
- 238000002474experimental methodMethods0.000description2
- 238000012360testing methodMethods0.000description2
- 206010039203Road traffic accidentDiseases0.000description1
- 238000013459approachMethods0.000description1
- 230000008878couplingEffects0.000description1
- 238000010168coupling processMethods0.000description1
- 238000005859coupling reactionMethods0.000description1
- 230000008092positive effectEffects0.000description1
- 230000009467reductionEffects0.000description1
Images










Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W40/00—Communication routing or communication path finding
- H04W40/02—Communication route or path selection, e.g. power-based or shortest path routing
- H04W40/20—Communication route or path selection, e.g. power-based or shortest path routing based on geographic position or location
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W40/00—Communication routing or communication path finding
- H04W40/02—Communication route or path selection, e.g. power-based or shortest path routing
- H04W40/026—Route selection considering the moving speed of individual devices
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/18—Self-organising networks, e.g. ad-hoc networks or sensor networks
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese【技术领域】【Technical field】
本发明属于物联网领域,具体涉及一种基于模糊逻辑优化策略的车辆自组网络路由新方法。The invention belongs to the field of Internet of Things, and in particular relates to a new method for vehicle self-organizing network routing based on a fuzzy logic optimization strategy.
【背景技术】【Background technique】
在现代智能交通系统中,车联网在减少交通拥堵,减少交通事故以及提供各种实时便捷服务方面发挥着重要作用。但是,它们都需要超可靠的低延迟通信,这对于当前的车联网应用是一个巨大的挑战。由于端到端架构的高度耦合,传统的网络中的路由方法很难满足异构车辆场景中的各种紧急需求。另一方面,MEC(Mobile Edge Computing,移动边缘计算)将云计算平台从核心网络迁移到移动访问网络的边缘,移动用户可以在本地访问大量的计算和存储资源,这有效地避免了核心网络的拥塞。MEC能够克服传统云计算的缺点,并满足高带宽和低延迟的一些应用需求。因此在边缘计算的应用场景下,研究车辆自组织网络中的路由方法十分有前景。In modern intelligent transportation systems, the Internet of Vehicles plays an important role in reducing traffic congestion, reducing traffic accidents, and providing various real-time convenient services. However, they all require ultra-reliable low-latency communication, which is a huge challenge for current IoV applications. Due to the high coupling of end-to-end architectures, it is difficult for traditional routing methods in networks to meet various urgent needs in heterogeneous vehicle scenarios. On the other hand, MEC (Mobile Edge Computing) migrates the cloud computing platform from the core network to the edge of the mobile access network, and mobile users can access a large number of computing and storage resources locally, which effectively avoids the need for the core network. congestion. MEC can overcome the shortcomings of traditional cloud computing and meet some application requirements for high bandwidth and low latency. Therefore, in the application scenario of edge computing, it is very promising to study the routing method in the vehicle self-organizing network.
现代的车辆上一般配备GPS等多种传感器,因此要获取车辆自身的位置、速度等信息是较为容易的,这就使得经典的基于地理位置的贪婪周边无状态路由(GreedyPerimeter Stateless Routing,GPSR)可以在此应用。该方法使用贪婪转发作为路由决策,每一跳都尽可能的接近目的节点,当转发出现路由空洞时,就采用周边转发,该方法依据直接邻节点进行下一跳选择,不需维护和存储路由表。但GPSR方法的下一跳节点通常位于通信范围的边界处,当车辆快速移动时,通信链路很可能发生断裂导致数据不能成功传输;并且由于车辆快速移动,邻居节点的位置信息可能更新不及时导致邻居节点的位置信息与实际位置出现偏差。Modern vehicles are generally equipped with various sensors such as GPS, so it is relatively easy to obtain information such as the vehicle's own position, speed, etc., which makes the classic location-based greedy surrounding stateless routing (GreedyPerimeter Stateless Routing, GPSR) can Apply here. This method uses greedy forwarding as the routing decision, and each hop is as close to the destination node as possible. When there is a routing hole in the forwarding, peripheral forwarding is used. This method selects the next hop based on the direct neighbor node, and does not need to maintain and store routes. surface. However, the next hop node of the GPSR method is usually located at the boundary of the communication range. When the vehicle moves rapidly, the communication link is likely to break and the data cannot be successfully transmitted; and because the vehicle moves rapidly, the location information of the neighbor nodes may not be updated in time. This causes the location information of neighbor nodes to deviate from the actual location.
【发明内容】[Content of the Invention]
本发明的目的主要为了解决GPSR的邻居节点位置获取滞后、路由判据单一等问题,提供一种基于模糊逻辑优化策略的车辆自组网络路由方法。本发明考虑把节点间的相对速度、当前转发节点与邻居节点和目的节点连线的夹角角度、邻居节点的节点密度作为模糊逻辑的输入,并采用无迹卡尔曼滤波预测邻居节点的位置,获取更准确的邻居节点位置信息。仿真结果表明,该路由方法弥补了GPSR方法的一些不足,合理的兼顾了数据包递交率和端到端时延,更加符合车辆自组织网的通信要求。The purpose of the present invention is to provide a vehicle ad hoc network routing method based on fuzzy logic optimization strategy, mainly to solve the problems of GPSR's neighbor node position acquisition lag and single routing criterion. The invention considers the relative speed between nodes, the angle between the current forwarding node and the connection between the neighbor node and the destination node, and the node density of the neighbor node as the input of the fuzzy logic, and uses the unscented Kalman filter to predict the position of the neighbor node, Get more accurate neighbor node location information. The simulation results show that the routing method makes up for some deficiencies of the GPSR method, reasonably considers the packet delivery rate and the end-to-end delay, and is more in line with the communication requirements of the vehicle ad hoc network.
本发明提供的一种基于模糊逻辑优化策略的车辆自组网络路由方法(GeographicRouting methodbased on Velocity,Angle and Density,GRVAD),主要包括如下步骤:A vehicle ad hoc network routing method (Geographic Routing method based on Velocity, Angle and Density, GRVAD) based on a fuzzy logic optimization strategy provided by the present invention mainly includes the following steps:
第1、系统模型构建与邻居节点位置预测:1. System model construction and neighbor node location prediction:
第1.1、系统模型构建;拟定的系统模型分为两种:Section 1.1, System Model Construction; the proposed system model is divided into two types:
有规则路线上的车辆移动场景,这种场景发生在一个有双向车道的十字路口道路中的车辆模拟正常城市道路的行驶状态,存在变道、转向、掉头的行为,每辆车都能够在固定的通信范围R内与其他车辆进行通信,所述的R表示信号传输半径;There is a vehicle movement scenario on a regular route. This scenario occurs in a crossroad with two-way lanes. The vehicle simulates the driving state of a normal urban road, and there are lane changes, turns, and U-turn behaviors. Communicate with other vehicles within the communication range R, where R represents the signal transmission radius;
无规则路线上的车辆移动场景,这种场景发生在没有严格的交通管制的地区道路上,车辆存在大量的无规则行驶行为,包括插队和逆行,道路中以及十字路口处的道路状况十分混乱,车辆行驶轨迹毫无规律,这种情况在实际情况中也时有发生,因此也很具有研究意义,这也体现了车辆自组织网络的复杂性;Vehicle movement scenarios on irregular routes. This scenario occurs on roads in areas without strict traffic control. Vehicles have a large number of irregular driving behaviors, including queue cutting and reverse driving. The road conditions on the road and at intersections are very chaotic. The driving trajectory of the vehicle is irregular, and this kind of situation occurs from time to time in the actual situation, so it is also of great research significance, which also reflects the complexity of the vehicle self-organizing network;
在上面两种模型的基础上,如果想要实现两车互相通信,可以假设设置的场景中行驶的车辆数量为N,对每辆车进行编号,每辆车的编号ID为i,i∈[1,N];车辆i在时刻t时的位置用(xi(t),yi(t))来表示,在时刻t时车辆i与车辆j之间的距离用dij(t)来表示,那么车辆i和车辆j能够互相通信且互为对方邻居节点的条件是:On the basis of the above two models, if you want to achieve mutual communication between two vehicles, you can assume that the number of vehicles driving in the set scene is N, number each vehicle, and the number ID of each vehicle is i, i∈[ 1, N]; the position of vehicle i at time t is represented by (xi(t), yi(t)), and the distance between vehicle i and vehicle j at time t is represented by dij(t) , Then the conditions for vehicle i and vehicle j to be able to communicate with each other and to be each other's neighbor nodes are:
dij(t)<R (1)dij(t) <R (1)
这里的dij(t)可以通过车辆i和车辆j在时刻t时的位置信息计算得到:Here dij(t) can be calculated from the position information of vehicle i and vehicle j at time t:

第1.2、为邻居节点建立状态方程和测量方程;1.2. Establish state equations and measurement equations for neighbor nodes;
第1.3、邻居节点位置预测过程和修正过程;1.3. Neighbor node position prediction process and correction process;
第2、用模糊逻辑改善GPSR贪婪转发策略,以此改善车辆移动过快导致的邻居节点位置不准确问题:Second, use fuzzy logic to improve the GPSR greedy forwarding strategy, so as to improve the inaccurate position of neighbor nodes caused by the vehicle moving too fast:
第2.1、模糊逻辑相关内容及操作;2.1. Fuzzy logic related content and operations;
第2.2、分析影响GPSR贪婪转发策略的因素,输出邻居节点作为下一跳的适应度,以此完善转发策略;2.2. Analyze the factors affecting the greedy forwarding strategy of GPSR, and output the fitness of neighbor nodes as the next hop to improve the forwarding strategy;
第3、设计基于模糊逻辑优化策略的路由方法,以此改善GPSR贪婪转发策略:3. Design a routing method based on fuzzy logic optimization strategy to improve GPSR greedy forwarding strategy:
第3.1、基于模糊逻辑优化策略的路由方法实现步骤;3.1. Implementation steps of routing method based on fuzzy logic optimization strategy;
第3.2、路由方法的复杂度分析;Section 3.2, the complexity analysis of routing methods;
路由方法的复杂度分析中,从时间和空间复杂度这两个角度出发去分析GRVAD路由方法的复杂度;GRVAD路由方法的时间复杂度主要取决于模糊逻辑优化后的贪婪策略建立的路由路径以及右手法则和左手法则所建立的路由路径;设整个网络中N个节点,最坏的情况是从源节点到目的节点的路由将网络中的每个剩余节点都利用一遍,因此最差的时间复杂度是O(n);假设在贪婪转发模式下此过程的时间复杂度为O(n1),周边转发模式使用右手规则,以帮助数据包绕过路由空洞,n2用于表示在此过程中转发节点的数量,令n=n1+n2,因此GRVAD路由方法的时间复杂度为O(n);在大型的车辆自组织网络中,车辆节点的频繁移动将使得一个节点的通信范围内的节点不断更替,因此,使用图的邻接矩阵表示节点及它们之间的关系更为合适,因为网络中的每个节点都存储了相应相邻节点的位置信息,所以O(n2)是GRVAD路由方法的空间复杂度。In the complexity analysis of the routing method, the complexity of the GRVAD routing method is analyzed from the perspective of time and space complexity; the time complexity of the GRVAD routing method mainly depends on the routing path established by the greedy strategy optimized by fuzzy logic and The routing path established by the right-hand rule and the left-hand rule; suppose there are N nodes in the entire network, the worst case is that the route from the source node to the destination node uses every remaining node in the network once, so the worst time is complicated The degree is O(n); assuming that the time complexity of this process is O(n1) in the greedy forwarding mode, the perimeter forwarding mode uses the right-hand rule to help packets bypass routing holes, and n2 is used to indicate forwarding in this process. The number of nodes, let n=n1+n2, so the time complexity of GRVAD routing method is O(n). Therefore, it is more appropriate to use the adjacency matrix of the graph to represent the nodes and the relationships between them, because each node in the network stores the location information of the corresponding adjacent nodes, so O(n2 ) is the GRVAD routing method. space complexity.
进一步的,步骤第1.2中,在一般情况下,可以默认每辆车上都装有GPS导航系统,可以在指定时刻测得车辆的位置和移动速度、移动方向等信息,由此得到车辆i在时刻t的状态矩阵:Further, in step 1.2, under normal circumstances, it can be assumed that each vehicle is equipped with a GPS navigation system, and information such as the position, moving speed, and moving direction of the vehicle can be measured at a specified time, so that the vehicle i can be obtained. The state matrix at time t:
Xi(t)=[xi(t),yi(t),ai(t),vi(t)]T (3)Xi(t) =[xi(t) ,yi(t) ,ai(t) ,vi(t) ]T (3)
若规定与车辆行进方向垂直的横向道路为x坐标方向,与车辆行进方向平行的纵向道路为y坐标方向,在式(3)中,xj(t)为x坐标方向,yj(t)为y坐标方向,ai(t)为车辆i在时刻t时相对于水平正角度的运动方向,ai(t)∈[0,π],vi(t)是车辆i在t时刻的运动速度,vi(t)∈[30,90]km/h。If the lateral road perpendicular to the vehicle's traveling direction is defined as the x-coordinate direction, and the longitudinal road parallel to the vehicle's traveling direction is the y-coordinate direction, in formula (3), xj(t) is the x-coordinate direction, and yj(t) is the y-coordinate direction, ai(t) is the movement direction of vehicle i at time t relative to the horizontal positive angle, ai(t) ∈ [0,π], vi(t) is the movement direction of vehicle i at time t Movement speed, vi(t) ∈ [30,90]km/h.
若车辆i在Δt时间段内所作的运动被近似为匀速直线运动,则下一时刻它的位置的状态方程如下:If the motion of the vehicle i in the Δt time period is approximated as a uniform linear motion, the state equation of its position at the next moment is as follows:

这里我们假设在Δt时间段后车辆i的运动速度和角度不发生改变,测量方程则可以由车辆i与其邻居节点中被选取为下一跳节点的车辆j之间的距离来表示,测量方程如下:Here we assume that the speed and angle of vehicle i do not change after the Δt time period. The measurement equation can be expressed by the distance between vehicle i and vehicle j selected as the next hop node in its neighbor nodes. The measurement equation is as follows :

上式中,Zij(t+Δt)为t+Δt时刻车辆i与车辆j之间通过测距仪器得到的距离,xj(t+Δt)和yj(t+Δt)是下一跳节点j在t+Δt时刻在地图上的实时横纵坐标位置。In the above formula, Zij(t+Δt) is the distance between vehicle i and vehicle j obtained by the distance measuring instrument at time t+Δt, and xj(t+Δt) and yj(t+Δt) are the next hop The real-time abscissa and ordinate position of node j on the map at time t+Δt.
步骤第1.3中在预测过程中,首先设σ为邻居节点,σ点的个数根据状态矩阵的维度确定并计算。M维系统需要选取2M+1个σ点,我们的系统为4维,选取9个σ点,均值在中心点处取得。In step 1.3, in the prediction process, first set σ as the neighbor node, and the number of σ points is determined and calculated according to the dimension of the state matrix. The M-dimensional system needs to select 2M+1 σ points. Our system is 4-dimensional, and 9 σ points are selected, and the mean value is obtained at the center point.
式(6)中的Pk-1是系统的协方差矩阵,式(6)如下:Pk-1 in equation (6) is the covariance matrix of the system, and equation (6) is as follows:

第1个σ点到第M+1个σ点的计算公式由式(7)、式(8)给出:The calculation formula from the first σ point to the M+1th σ point is given by equations (7) and (8):


上式中,K是可调参数,我们将其设置为3-M。Lk-1是要求解的矩阵,l是矩阵的列数,矩阵Lk-1的第l列记作collLk-1。同理,第M+2到2M+1个σ点的计算公式如下:In the above formula, K is an adjustable parameter, we set it to 3-M. Lk-1 is the matrix to be solved, l is the number of columns of the matrix, and the lth column of the matrix Lk-1 is denoted as coll Lk-1 . Similarly, the calculation formula of the M+2 to 2M+1 σ points is as follows:

然后将σ点代入非线性函数f,就可以得到其对应的映射点集y:Then the σ point is substituted into the nonlinear function f, and its corresponding mapping point set y can be obtained:

后续计算所需要的权重值如下:The weight values required for subsequent calculations are as follows:

计算预测的均值yk和方差Pk的公式如下:The formulas for calculating the predicted meanyk and variancePk are as follows:


Qk为噪声的协方差矩阵,进行修正过程,σ点集依据测量模型映射到测量点集:Qk is the covariance matrix of noise, the correction process is performed, and the σ point set is mapped to the measurement point set according to the measurement model:

得到测量系统的均值zk和方差Pz的公式如下:The formulas for obtaining the mean zk and variance Pz of the measurement system are as follows:


导出协方差Pxz和卡尔曼增益Kk的公式如下:The formulas for deriving the covariancePxz and the Kalman gainKk are as follows:


更新修正的状态值并更新协方差矩阵:Update the corrected state values and update the covariance matrix:


式(19)中的xk为更新后的更加准确的系统状态信息。xk in formula (19) is the updated and more accurate system state information.
进一步的,步骤第2.1中模糊逻辑相关内容及操作如下。Further, the relevant content and operations of fuzzy logic in step 2.1 are as follows.
模糊集合:论域U中模糊集合F用一个在区间[0,1]上取值的隶属函数μF来表示,即:Fuzzy set: The fuzzy set F in the universe U is represented by a membership functionμF that takes a value in the interval [0,1], namely:
μF:U→[0,1] (21)μF : U→[0, 1] (21)
如果μF(u)=1,则u属于U;如果μF(u)=0,则u不属于U;如果0<μF(u)<1表示u部分属于U。IfμF (u)=1, then u belongs to U; ifμF (u)=0, then u does not belong to U; if 0<μF (u)<1, it means that part of u belongs to U.
并操作:并操作(A∪B)的隶属度函数μA∪B对所有u∈U被逐点定义为取大运算,即:Parallel operation: The membership function μA∪B of the parallel operation (A∪B) is defined point-by-point as a large operation for all u∈U, namely:
μA∪B(u)=max{μA(u),μB(u)} (22)μA∪B (u)=max{μA (u),μB (u)} (22)
交操作:交操作(A∩B)的隶属函数μA∩B对所有u∈U被逐点定义为取小运算,即:Intersection operation: The membership function μA∩B of the intersection operation (A∩B) is defined pointwise as a small operation for all u∈U, namely:
μA∩B(u)=min{μA(u),μB(u)} (23)μA∩B (u)=min{μA (u),μB (u)} (23)
设有界闭集V上的m次光滑齐次函数为

其中ζM为
设a,b是实数且a满足|a|<1,那么

考虑在Rn上连续的m次光滑齐次函数



那么利用模糊逻辑的输出可得:Then the output of fuzzy logic can be obtained:

步骤第2.2中分析影响GPSR贪婪转发策略的因素,得到三个参数作为模糊逻辑的输入,输出邻居节点作为下一跳的适应度得分,以此完善转发策略:In step 2.2, analyze the factors affecting the GPSR greedy forwarding strategy, obtain three parameters as the input of fuzzy logic, and output the neighbor node as the fitness score of the next hop, so as to improve the forwarding strategy:
速度因素:在当前数据转发节点的邻居节点中选择与其速度差值最小的邻居节点,这样可以在数据转发的过程中尽可能久的保持这两节点间的链路连通。用fv表示在改进的转发策略中的速度影响函数,其数学公式为:Speed factor: Select the neighbor node with the smallest speed difference among the neighbor nodes of the current data forwarding node, so that the link between the two nodes can be maintained as long as possible during the data forwarding process. The speed impact function in the improved forwarding strategy is represented by fv , and its mathematical formula is:

式中VS为当前节点S的速度,Vσ为当前节点的任一邻居节点σ的速度,Vmax为车辆在道路上的最大行驶速度,故速度函数fv的取值范围为[0,1];where VS is the speed of the current node S, Vσ is the speed of any neighbor node σ of the current node, and Vmax is the maximum speed of the vehicle on the road, so the value range of the speed function fv is [0, 1];
角度因素:在当前节点和目的节点之间建立连接,并且在当前节点的任一相邻节点和当前节点之间进行连接,从而应选择让角度θ最小的相邻节点作为下一个转发节点。用fa表示在改进的转发策略中的角度影响函数,其数学公式为:Angle factor: A connection is established between the current node and the destination node, and a connection is made between any adjacent node of the current node and the current node, so the adjacent node with the smallest angle θ should be selected as the next forwarding node. The angle influence function in the improved forwarding strategy is represented by fa , and its mathematical formula is:

其中,θ是当前节点与目的节点的连线和当前节点的任一邻居节点与当前节点之间的连线之间的夹角;Among them, θ is the angle between the connection line between the current node and the destination node and the connection line between any neighbor node of the current node and the current node;
密度因素:一个节点的邻居节点数越多,则它的节点密度越高,当选下一跳节点就越有优势。用fd表示在改进的转发策略中的密度影响函数,其数学公式为:Density factor: The more neighbor nodes a node has, the higher its node density, and the more advantageous it is to elect the next-hop node. The density effect function in the improved forwarding strategy is represented by fd , and its mathematical formula is:

其中,Σne为节点e的邻居节点个数,网络中的节点总数为n,当前节点S到目的节点D的距离为dSD,理想情况下每个节点的邻居节点个数为n/(dSD/R),信号传输半径为R,从源节点到目的节点转发数据时的路由跳数为dSD/R,故密度函数fd的取值范围为[0,1]。Among them, Σne is the number of neighbor nodes of node e, the total number of nodes in the network is n, the distance from the current node S to the destination node D is dSD , and ideally the number of neighbor nodes of each node is n/(dSD /R), the signal transmission radius is R, and the number of routing hops when forwarding data from the source node to the destination node is dSD /R, so the value range of the density function fd is [0, 1].
反模糊化:反模糊化是将获得的模糊结论转换为准确数字并输出的过程。在这里,我们采用centroid方法来进行反模糊化,其表达式为:Defuzzification: Defuzzification is the process of converting the obtained fuzzy conclusions into accurate numbers and outputting them. Here, we use the centroid method to de-fuzzify, and its expression is:

其中k是输出变量,ξ(k)是隶属度函数的输出,Frank为节点作为下一跳节点的适应度得分,用来衡量一个车辆作为下一跳节点的性能。where k is the output variable, ξ(k) is the output of the membership function, and Frank is the fitness score of the node as the next hop node, which is used to measure the performance of a vehicle as the next hop node.
设当前节点为Z,Z的任一邻居节点为O,模糊逻辑的输出即下一跳的适应度得分用SZO来表示。SZO的计算公式为:Suppose the current node is Z, and any neighbor node of Z is O, and the output of fuzzy logic, that is, the fitness score of the next hop, is represented by SZO . The formula for calculatingSZO is:
SZO=α1fv+α2fa+α1fd (31)SZO =α1 fv +α2 fa +α1 fd (31)
fv是改进转发策略中的速度影响函数,fa是改进转发策略中的角度影响函数,fd是改进转发策略中的密度影响函数。α1、α2、α3均为可调参数,并满足α1+α2+α3=1,它们的值可以根据不同的模拟场景进行调整。fv is the speed influence function in the improved forwarding strategy, fa is the angle influence function in the improved forwarding strategy, and fd is the density influence function in the improved forwarding strategy. α1 , α2 , and α3 are all adjustable parameters, and satisfy α1 +α2 +α3 =1, and their values can be adjusted according to different simulation scenarios.
进一步的,步骤3.1中基于模糊逻辑优化策略的路由方法的实现步骤描述如下:Further, the implementation steps of the routing method based on the fuzzy logic optimization strategy in step 3.1 are described as follows:
(1)每个车辆都具有MEC赋予的基本的计算能力且每个车辆节点都可以通过信标分组与它的邻居节点互相报告位置、速度、运动方向等信息,并定期更新邻居节点表。(1) Each vehicle has the basic computing power endowed by MEC, and each vehicle node can report position, speed, direction of movement and other information to each other through beacon grouping with its neighbor nodes, and regularly update the neighbor node table.
(2)如果源节点需要传输数据,它将在当前节点的相邻节点表中查询目标节点信息,如果有,则将数据包转发到目标节点以完成传输任务;否则,进入步骤(3)。(2) If the source node needs to transmit data, it will query the target node information in the adjacent node table of the current node, if there is, forward the data packet to the target node to complete the transmission task; otherwise, go to step (3).
(3)通过等式(3)-(20)预测当前节点相邻节点的位置,并更新邻居节点表中相应信息。(3) Predict the position of the adjacent nodes of the current node through equations (3)-(20), and update the corresponding information in the neighbor node table.
(4)判断当前节点的邻居节点中是否至少存在一个满足贪婪转发的节点,若是则转到步骤(5);否则转到步骤(6)。(4) Determine whether there is at least one node that satisfies greedy forwarding among the neighbor nodes of the current node, if so, go to step (5); otherwise, go to step (6).
(5)通过公式(31)计算当前节点的每一个邻居节点作为下一跳节点的适应度得分,将适应度得分最高的节点作为下一跳节点,执行完毕转至步骤(7)。(5) Calculate the fitness score of each neighbor node of the current node as the next hop node by formula (31), take the node with the highest fitness score as the next hop node, and go to step (7) after execution.
(6)进入周边转发模式,当数据包绕过空洞区域并满足贪婪转发要求后,转步骤(5)。(6) Enter the peripheral forwarding mode, when the data packet bypasses the empty area and meets the greedy forwarding requirement, go to step (5).
(7)重复上述步骤(2)-(6),直到传输任务成功完成。(7) Repeat the above steps (2)-(6) until the transmission task is successfully completed.
本发明的优点和积极效果Advantages and Positive Effects of the Invention
一种基于模糊逻辑优化策略的车辆自组网络路由新方法,在该方法中,主要研究了如何解决GPSR的邻居节点位置获取滞后、路由判据单一等问题,本发明考虑把节点间的相对速度、当前节点与邻居节点和目的节点连线的夹角、邻居节点的节点密度作为模糊逻辑的输入,并采用无迹卡尔曼滤波预测邻居节点的位置,获取更准确的邻居节点位置信息。仿真结果表明,该路由方法弥补了GPSR方法的一些不足,合理的兼顾了数据包递交率和端到端时延,更加符合车辆自组织网的通信要求,具有一定的实用价值。A new method for vehicle ad hoc network routing based on fuzzy logic optimization strategy. In this method, it mainly studies how to solve the problems of GPSR's neighbor node position acquisition lag and single routing criterion. The present invention considers the relative speed between nodes. , the angle between the current node and the connection between the neighbor node and the destination node, the node density of the neighbor node as the input of the fuzzy logic, and the unscented Kalman filter is used to predict the location of the neighbor node to obtain more accurate neighbor node location information. The simulation results show that the routing method makes up for some deficiencies of the GPSR method, reasonably considers the packet delivery rate and the end-to-end delay, and is more in line with the communication requirements of the vehicle ad hoc network, and has certain practical value.
【附图说明】[Description of drawings]
图1是有规则车辆移动场景图;Figure 1 is a scene diagram of a regular vehicle movement;
图2是无规则车辆移动场景图;Figure 2 is a scene diagram of irregular vehicle movement;
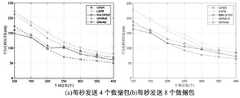
图3是不同数据包发送速率下车辆总数对数据包递交率的影响图;其中,(a)表示每秒发送4个数据包时车辆总数对数据包递交率的影响,(b)表示每秒发送8个数据包时车辆总数对数据包递交率的影响;Figure 3 is a graph showing the influence of the total number of vehicles on the data packet delivery rate under different data packet sending rates; where (a) represents the influence of the total number of vehicles on the data packet delivery rate when 4 data packets are sent per second, (b) represents the per second The effect of the total number of vehicles on the packet delivery rate when 8 packets are sent;
图4是不同数据包发送速率下车辆总数对平均端到端时延的影响;其中,(a)表示每秒发送4个数据包时车辆总数对平均端到端时延的影响,(b)表示每秒发送8个数据包时车辆总数对平均端到端时延的影响;Figure 4 shows the effect of the total number of vehicles on the average end-to-end delay under different packet sending rates; (a) represents the effect of the total number of vehicles on the average end-to-end delay when 4 packets are sent per second, (b) Indicates the effect of the total number of vehicles on the average end-to-end delay when 8 packets are sent per second;
图5是不同数据包发送速率下车辆总数对平均端到端跳数的影响图;其中,(a)表示每秒发送4个数据包时车辆总数对平均端到端跳数的影响,(b)表示每秒发送8个数据包时车辆总数对平均端到端跳数的影响;Figure 5 is a graph of the influence of the total number of vehicles on the average end-to-end hops under different packet sending rates; (a) represents the effect of the total number of vehicles on the average end-to-end hops when 4 packets are sent per second, (b) ) represents the effect of the total number of vehicles on the average end-to-end hops when 8 packets are sent per second;
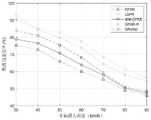
图6是不同数据包发送速率下车辆最大速度对数据包递交率的影响图;其中,(a)表示每秒发送4个数据包时车辆最大速度对数据包递交率的影响,(b)表示每秒发送8个数据包时车辆最大速度对数据包递交率的影响;Figure 6 is a graph showing the influence of the maximum vehicle speed on the data packet delivery rate under different data packet sending rates; (a) represents the influence of the maximum vehicle speed on the data packet delivery rate when 4 data packets are sent per second, and (b) represents The influence of the maximum speed of the vehicle on the packet delivery rate when sending 8 packets per second;
图7是不同数据包发送速率下车辆最大速度对平均端到端时延的影响图;其中,(a)表示每秒发送4个数据包时车辆最大速度对平均端到端时延的影响,(b)表示每秒发送8个数据包时车辆最大速度对平均端到端时延的影响;Figure 7 is a graph showing the influence of the maximum vehicle speed on the average end-to-end delay under different data packet sending rates; among them, (a) represents the influence of the maximum vehicle speed on the average end-to-end delay when 4 data packets are sent per second, (b) represents the effect of the maximum vehicle speed on the average end-to-end delay when 8 packets are sent per second;
图8是不同数据包发送速率下车辆最大速度对平均端到端跳数的影响图;其中,(a)表示每秒发送4个数据包时车辆最大速度对平均端到端跳数的影响,(b)表示每秒发送8个数据包时车辆最大速度对平均端到端跳数的影响;Figure 8 is a graph of the influence of the maximum vehicle speed on the average end-to-end hops under different packet sending rates; where (a) represents the influence of the vehicle's maximum speed on the average end-to-end hops when 4 packets are sent per second, (b) represents the effect of the maximum vehicle speed on the average end-to-end hop count when 8 packets are sent per second;
图9是实际场景道路模型图;Fig. 9 is the actual scene road model diagram;
图10是真实场景下车辆最大速度对平均端到端时延的影响;Figure 10 shows the effect of the maximum vehicle speed on the average end-to-end delay in the real scene;
图11是真实场景下车辆最大速度对数据包递交率的影响图;Figure 11 is a graph of the influence of the maximum speed of the vehicle on the packet delivery rate in the real scene;
图12是本发明一种基于模糊逻辑优化策略的车辆自组网络路由新方法的流程图。FIG. 12 is a flow chart of a new method of vehicle ad hoc network routing based on fuzzy logic optimization strategy of the present invention.
【具体实施方式】【Detailed ways】
实施例1Example 1
本实验使用了MATLAB平台,对设置的GRVAD(基于模糊逻辑优化策略的路由方法)路由方法进行测试。将提出的GRVAD路由方法与GPSR、GPSR-R、LSPR和MM-GPSR路由方法进行比较,实验证明该路由方法弥补了GPSR方法的一些不足,合理的兼顾了数据包递交率和端到端时延,更加符合车辆自组织网的通信要求。This experiment uses the MATLAB platform to test the GRVAD (Routing Method Based on Fuzzy Logic Optimization Strategy) routing method. The proposed GRVAD routing method is compared with the GPSR, GPSR-R, LSPR and MM-GPSR routing methods. The experiments show that the routing method makes up for some shortcomings of the GPSR method, and reasonably takes into account the packet delivery rate and end-to-end delay. , which is more in line with the communication requirements of the vehicle self-organizing network.
参见附图12,本实例提供的一种基于模糊逻辑优化策略的车辆自组网络路由方法,主要包括如下关键步骤:Referring to FIG. 12 , a vehicle ad hoc network routing method based on fuzzy logic optimization strategy provided by this example mainly includes the following key steps:
第1、系统模型构建与邻居节点位置预测:1. System model construction and neighbor node location prediction:
第1.1、系统模型构建;Section 1.1, system model construction;
拟定的系统模型分为两种,有规则路线上的车辆移动场景,这种场景发生在一个有双向车道的十字路口道路中的车辆模拟正常城市道路的行驶状态,存在变道、转向、掉头的行为,每辆车都能够在固定的通信范围R内与其他车辆进行通信,所述R表示信号传输半径;The proposed system model is divided into two types. There are vehicle movement scenarios on a regular route. This scenario occurs in a crossroad with two-way lanes. The vehicle simulates the driving state of a normal urban road, and there are lane changes, turns, and U-turns. behavior, each vehicle is able to communicate with other vehicles within a fixed communication range R, where R represents the signal transmission radius;
无规则路线上的车辆移动场景,这种场景一般发生在没有严格的交通管制的地区道路上,车辆存在大量的无规则行驶行为如插队、逆行等,道路中尤其是十字路口处的道路状况十分混乱,车辆行驶轨迹毫无规律,这种情况在实际情况中也时有发生,因此也很具有研究意义,这也体现了车辆自组织网络的复杂性。Vehicle movement scenarios on irregular routes. This scenario generally occurs on roads in areas without strict traffic control. Vehicles have a large number of irregular driving behaviors such as queue cutting and reverse driving. The road conditions on roads, especially at intersections are very poor. Confusion and irregular vehicle trajectories occur from time to time in actual situations, so it is also of great research significance, which also reflects the complexity of vehicle self-organizing networks.
在上面两种模型的基础上,如果想要实现两车互相通信可以假设设置的场景中行驶的车辆数量为N,对每辆车编号,每辆车的ID为i,i∈[1,N]。车辆i在时刻t时的位置用(xi(t),yi(t))来表示,在时刻t时车辆i与车辆j之间的距离用dij(t)来表示,那么车辆i和车辆j可以互相通信且互为对方邻居节点的条件是:On the basis of the above two models, if you want to achieve mutual communication between two vehicles, it can be assumed that the number of vehicles traveling in the set scene is N, and each vehicle is numbered, and the ID of each vehicle is i, i∈[1,N ]. The position of vehicle i at time t is represented by (xi(t) , yi(t) ), and the distance between vehicle i and vehicle j at time t is represented by dij(t) , then vehicle i The conditions for which and vehicle j can communicate with each other and are each other's neighbor nodes are:
dij(t)<R (1)dij(t) <R (1)
这里的dij(t)可以通过车辆i和车辆j在时刻t时的位置信息计算得到:Here dij(t) can be calculated from the position information of vehicle i and vehicle j at time t:

第1.2、为邻居节点建立状态方程和测量方程;1.2. Establish state equations and measurement equations for neighbor nodes;
在一般情况下,可以默认每辆车上都装有GPS导航系统,可以在指定时刻测得车辆的位置和移动速度、移动方向等信息,由此得到车辆i在时刻t时的状态矩阵:In general, it can be assumed that each vehicle is equipped with a GPS navigation system, and information such as the vehicle's position, moving speed, and moving direction can be measured at a specified time, thereby obtaining the state matrix of vehicle i at time t:
Xi(t)=[xi(t),yi(t),ai(t),vi(t)]T (3)Xi(t) =[xi(t) ,yi(t) ,ai(t) ,vi(t) ]T (3)
若规定图1中与车辆行进方向垂直的横向道路为x坐标方向,与车辆行进方向平行的纵向道路为y坐标方向,在式(3)中,xj(t)为x坐标方向,yj(t)为y坐标方向,ai(t)为车辆i在时刻t时相对于水平正角度的运动方向,ai(t)∈[0,π],vi(t)是车辆i在t时刻的运动速度,vi(t)∈[30,90]km/h。If the horizontal road perpendicular to the vehicle's traveling direction in Fig. 1 is defined as the x-coordinate direction, and the longitudinal road parallel to the vehicle's traveling direction is defined as the y-coordinate direction, in formula (3), xj(t) is the x-coordinate direction, yj (t) is the y coordinate direction, ai(t) is the movement direction of the vehicle i relative to the horizontal positive angle at time t, ai(t) ∈ [0,π], vi(t) is the vehicle i in Movement speed at time t, vi(t) ∈ [30,90]km/h.
若车辆i在Δt时间段内所作的运动被近似为匀速直线运动,则下一时刻它的位置的状态方程如下:If the motion of the vehicle i in the Δt time period is approximated as a uniform linear motion, the state equation of its position at the next moment is as follows:

这里我们假设在Δt时间段后车辆i的运动速度和角度不发生改变,测量方程则可以由车辆i与其邻居节点中被选取为下一跳节点的车辆j之间的距离来表示,测量方程如下:Here we assume that the speed and angle of vehicle i do not change after the Δt time period. The measurement equation can be expressed by the distance between vehicle i and vehicle j selected as the next hop node in its neighbor nodes. The measurement equation is as follows :

上式中,Zij(t+Δt)为t+Δt时刻车辆i与车辆j之间通过测距仪器得到的距离,xj(t+Δt)和yj(t+Δt)是下一跳节点j在t+Δt时刻在地图上的实时横纵坐标位置。In the above formula, Zij(t+Δt) is the distance between vehicle i and vehicle j obtained by the distance measuring instrument at time t+Δt, and xj(t+Δt) and yj(t+Δt) are the next hop The real-time abscissa and ordinate position of node j on the map at time t+Δt.
第1.3、邻居节点位置预测过程和修正过程;1.3. Neighbor node position prediction process and correction process;
在预测过程中,首先设σ为邻居节点,σ点的个数根据状态矩阵的维度确定并计算。M维系统需要选取2M+1个σ点,本系统为4维,选取9个σ点,均值在中心点处取得。In the prediction process, first set σ as the neighbor node, and the number of σ points is determined and calculated according to the dimension of the state matrix. The M-dimensional system needs to select 2M+1 σ points. This system is 4-dimensional, and 9 σ points are selected, and the mean value is obtained at the center point.
式(6)中的Pk-1是系统的协方差矩阵,式(6)如下:Pk-1 in equation (6) is the covariance matrix of the system, and equation (6) is as follows:

第1个σ点到第M+1个σ点的计算公式由式(7)、式(8)给出:The calculation formula from the first σ point to the M+1th σ point is given by equations (7) and (8):


上式中,K是可调参数,我们将其设置为3-M。Lk-1是要求解的矩阵,l是矩阵的列数,矩阵Lk-1的第l列记作collLk-1。同理,第M+2到2M+1个σ点的计算公式如下:In the above formula, K is an adjustable parameter, we set it to 3-M. Lk-1 is the matrix to be solved, l is the number of columns of the matrix, and the lth column of the matrix Lk-1 is denoted as coll Lk-1 . Similarly, the calculation formula of the M+2 to 2M+1 σ points is as follows:

然后将σ点代入非线性函数f,就可以得到其对应的映射点集y:Then the σ point is substituted into the nonlinear function f, and its corresponding mapping point set y can be obtained:

后续计算所需要的权重值如下:The weight values required for subsequent calculations are as follows:

计算预测的均值yk和方差Pk的公式如下:The formulas for calculating the predicted meanyk and variancePk are as follows:


Qk为噪声的协方差矩阵,进行修正过程,σ点集依据测量模型映射到测量点集:Qk is the covariance matrix of noise, the correction process is performed, and the σ point set is mapped to the measurement point set according to the measurement model:

得到测量系统的均值zk和方差Pz的公式如下:The formulas for obtaining the mean zk and variance Pz of the measurement system are as follows:


导出协方差Pxz和卡尔曼增益Kk的公式如下:The formulas for deriving the covariancePxz and the Kalman gainKk are as follows:


更新修正的状态值并更新协方差矩阵:Update the corrected state values and update the covariance matrix:


式(19)中的xk为更新后的更加准确的系统状态信息。xk in formula (19) is the updated and more accurate system state information.
第2、用模糊逻辑改善GPSR贪婪转发策略,以此改善车辆移动过快导致的邻居节点位置信息不准确的问题:Second, use fuzzy logic to improve the GPSR greedy forwarding strategy, so as to improve the problem of inaccurate location information of neighbor nodes caused by the vehicle moving too fast:
第2.1、模糊逻辑相关内容及操作;2.1. Fuzzy logic related content and operations;
模糊逻辑相关内容及操作如下。The content and operation of fuzzy logic are as follows.
模糊集合:论域U中模糊集合F用一个在区间[0,1]上取值的隶属函数μF来表示,即:Fuzzy set: The fuzzy set F in the universe U is represented by a membership functionμF that takes a value in the interval [0,1], namely:
μF:U→[0,1] (21)μF : U→[0, 1] (21)
如果μF(u)=1,则u属于U;如果μF(u)=0,则u不属于U;如果0<μF(u)<1表示u部分属于U。IfμF (u)=1, then u belongs to U; ifμF (u)=0, then u does not belong to U; if 0<μF (u)<1, it means that part of u belongs to U.
并操作:并操作(A∪B)的隶属度函数μA∪B对所有u∈U被逐点定义为取大运算,即:Parallel operation: The membership function μA∪B of the parallel operation (A∪B) is defined point-by-point as a large operation for all u∈U, namely:
μA∪B(u)=max{μA(u),μB(u)} (22)μA∪B (u)=max{μA (u),μB (u)} (22)
交操作:交操作(A∩B)的隶属函数μA∩B对所有u∈U被逐点定义为取小运算,即:Intersection operation: The membership function μA∩B of the intersection operation (A∩B) is defined pointwise as a small operation for all u∈U, namely:
μA∩B(u)=min{μA(u),μB(u)} (23)μA∩B (u)=min{μA (u),μB (u)} (23)
设有界闭集V上的m次光滑齐次函数为

其中ζM为
设a,b是实数且a满足|a|<1,那么

考虑在Rn上连续的m次光滑齐次函数



那么利用模糊逻辑的输出可得:Then the output of fuzzy logic can be obtained:

第2.2、分析影响GPSR贪婪转发策略的因素,输出邻居节点作为下一跳的适应度,以此完善转发策略;2.2. Analyze the factors affecting the greedy forwarding strategy of GPSR, and output the fitness of neighbor nodes as the next hop to improve the forwarding strategy;
速度因素:在当前数据转发节点的邻居节点中选择与其速度差值最小的邻居节点,这样可以在数据转发的过程中尽可能久的保持这两节点间的链路连通。用fv表示在改进的转发策略中的速度影响函数,其数学公式为:Speed factor: Select the neighbor node with the smallest speed difference among the neighbor nodes of the current data forwarding node, so that the link between the two nodes can be maintained as long as possible during the data forwarding process. The speed impact function in the improved forwarding strategy is represented by fv , and its mathematical formula is:

式中VS为当前节点S的速度,Vσ为当前节点的任一邻居节点σ的速度,Vmax为车辆在道路上的最大行驶速度,故速度函数fv的取值范围为[0,1];where VS is the speed of the current node S, Vσ is the speed of any neighbor node σ of the current node, and Vmax is the maximum speed of the vehicle on the road, so the value range of the speed function fv is [0, 1];
角度因素:在当前节点和目的节点之间建立连接,并且在当前节点的任一相邻节点和当前节点之间进行连接,从而应选择让角度θ最小的相邻节点作为下一个转发节点。用fa表示在改进的转发策略中的角度影响函数,其数学公式为:Angle factor: A connection is established between the current node and the destination node, and a connection is made between any adjacent node of the current node and the current node, so the adjacent node with the smallest angle θ should be selected as the next forwarding node. The angle influence function in the improved forwarding strategy is represented by fa , and its mathematical formula is:

其中,θ是当前节点与目的节点的连线和当前节点的任一邻居节点与当前节点之间的连线之间的夹角.Among them, θ is the angle between the connection line between the current node and the destination node and the connection line between any neighbor node of the current node and the current node.
密度因素:一个节点的邻居节点数越多,则它的节点密度越高,当选下一跳节点就越有优势。用fd表示在改进的转发策略中的密度影响函数,其数学公式为:Density factor: The more neighbor nodes a node has, the higher its node density, and the more advantageous it is to elect the next-hop node. The density effect function in the improved forwarding strategy is represented by fd , and its mathematical formula is:

其中,Σne为节点e的邻居节点个数,网络中的节点总数为n,当前节点S到目的节点D的距离为dSD,理想情况下每个节点的邻居节点个数为n/(dSD/R),信号传输半径为R,从源节点到目的节点转发数据时的路由跳数为dSD/R,故密度函数fd的取值范围为[0,1]。Among them, Σne is the number of neighbor nodes of node e, the total number of nodes in the network is n, the distance from the current node S to the destination node D is dSD , and ideally the number of neighbor nodes of each node is n/(dSD /R), the signal transmission radius is R, and the number of routing hops when forwarding data from the source node to the destination node is dSD /R, so the value range of the density function fd is [0, 1].
反模糊化:反模糊化是将获得的模糊结论转换为准确数字并输出的过程。在这里,我们采用centroid方法来进行反模糊化,其表达式为:Defuzzification: Defuzzification is the process of converting the obtained fuzzy conclusions into accurate numbers and outputting them. Here, we use the centroid method to de-fuzzify, and its expression is:

其中k是输出变量,ξ(k)是隶属度函数的输出,Frank为节点作为下一跳节点的适应度得分,用来衡量一个车辆作为下一跳节点的性能。where k is the output variable, ξ(k) is the output of the membership function, and Frank is the fitness score of the node as the next hop node, which is used to measure the performance of a vehicle as the next hop node.
设当前节点为Z,Z的任一邻居节点为O,模糊逻辑的输出即下一跳的适应度得分用SZO来表示。SZO的计算公式为:Suppose the current node is Z, any neighbor node of Z is O, and the output of fuzzy logic, that is, the fitness score of the next hop, is represented by SZO . The formula for calculatingSZO is:
SZO=α1fv+α2fa+α1fd (31)SZO =α1 fv +α2 fa +α1 fd (31)
fv是改进转发策略中的速度影响函数,fa是改进转发策略中的角度影响函数,fd是改进转发策略中的密度影响函数。α1、α2、α3均为可调参数,并满足α1+α2+α3=1,它们的值可以根据不同的模拟场景进行调整。fv is the speed influence function in the improved forwarding strategy, fa is the angle influence function in the improved forwarding strategy, and fd is the density influence function in the improved forwarding strategy. α1 , α2 , and α3 are all adjustable parameters, and satisfy α1 +α2 +α3 =1, and their values can be adjusted according to different simulation scenarios.
第3、基于模糊逻辑优化策略的路由方法实现步骤:3. Implementation steps of routing method based on fuzzy logic optimization strategy:
第3.1、GRVAD路由方法实现步骤;3.1. Implementation steps of GRVAD routing method;
GRVAD路由方法的实现步骤描述如下:The implementation steps of the GRVAD routing method are described as follows:
(1)每个车辆都具有MEC赋予的基本的计算能力且每个车辆节点都可以通过信标分组与它的邻居节点互相报告位置、速度、运动方向等信息,并定期更新邻居节点表。(1) Each vehicle has the basic computing power endowed by MEC, and each vehicle node can report position, speed, direction of movement and other information to each other through beacon grouping with its neighbor nodes, and regularly update the neighbor node table.
(2)如果源节点需要传输数据,它将在当前节点的相邻节点表中查询目标节点信息,如果有,则将数据包转发到目标节点以完成传输任务;否则,进入步骤(3)。(2) If the source node needs to transmit data, it will query the target node information in the adjacent node table of the current node, if there is, forward the data packet to the target node to complete the transmission task; otherwise, go to step (3).
(3)通过等式(3)-(20)预测当前节点相邻节点的位置,并更新邻居节点表中相应信息。(3) Predict the position of the adjacent nodes of the current node through equations (3)-(20), and update the corresponding information in the neighbor node table.
(4)判断当前节点的邻居节点中是否至少存在一个满足贪婪转发的节点,若是则转到步骤(5);否则转到步骤(6)。(4) Determine whether there is at least one node that satisfies greedy forwarding among the neighbor nodes of the current node, if so, go to step (5); otherwise, go to step (6).
(5)通过公式(31)计算当前节点的每一个邻居节点作为下一跳节点的适应度得分,将适应度得分最高的节点作为下一跳节点,执行完毕转至步骤(7)。(5) Calculate the fitness score of each neighbor node of the current node as the next hop node by formula (31), take the node with the highest fitness score as the next hop node, and go to step (7) after execution.
(6)进入周边转发模式,当数据包绕过空洞区域并满足贪婪转发要求后,转步骤(5)。(6) Enter the peripheral forwarding mode, when the data packet bypasses the empty area and meets the greedy forwarding requirement, go to step (5).
(7)重复上述步骤(2)-(6),直到传输任务成功完成。(7) Repeat the above steps (2)-(6) until the transmission task is successfully completed.
第3.2、路由方法的复杂度分析;Section 3.2, the complexity analysis of routing methods;
我们从时间和空间复杂度这两个角度出发去分析GRVAD路由方法的复杂度。GRVAD路由方法的时间复杂度主要取决于模糊逻辑优化后的贪婪策略建立的路由路径以及右手法则和左手法则所建立的路由路径。设整个网络中N个节点,最坏的情况是从源节点到目的节点的路由将网络中的每个剩余节点都利用一遍,因此最差的时间复杂度是O(n)。假设在贪婪转发模式下此过程的时间复杂度为O(n1)。周边转发模式使用右手规则,以帮助数据包绕过路由空洞,n2用于表示在此过程中转发节点的数量。令n=n1+n2,因此GRVAD路由方法的时间复杂度为O(n)。在大型的车辆自组织网络中,车辆节点的频繁移动将使得一个节点的通信范围内的节点不断更替,因此,使用图的邻接矩阵表示节点及它们之间的关系更为合适。因为网络中的每个节点都存储了相应相邻节点的位置信息,所以O(n2)是GRVAD路由方法的空间复杂度。We analyze the complexity of the GRVAD routing method from the perspective of time and space complexity. The time complexity of the GRVAD routing method mainly depends on the routing paths established by the greedy strategy optimized by fuzzy logic and the routing paths established by the right-hand rule and the left-hand rule. Suppose there are N nodes in the entire network, the worst case is that the route from the source node to the destination node utilizes every remaining node in the network, so the worst time complexity is O(n). Assume the time complexity of this process is O(n1) in greedy forwarding mode. The perimeter forwarding mode uses the right-hand rule to help packets bypass routing holes, and n2 is used to represent the number of forwarding nodes in the process. Let n=n1+n2, so the time complexity of the GRVAD routing method is O(n). In a large-scale vehicle ad hoc network, the frequent movement of vehicle nodes will make the nodes within the communication range of a node change constantly. Therefore, it is more appropriate to use the adjacency matrix of the graph to represent the nodes and their relationships. Because each node in the network stores the location information of the corresponding neighboring nodes, O(n2 ) is the space complexity of the GRVAD routing method.
我们用MATLAB进行仿真实验,为了实验场景接近真实情况,先绘制1000×1000的网络拓扑场景如图1和图2所示,其中包含水平双向6车道、垂直双向6车道,一个十字路口。车辆随机生成在道路上,车辆最大移动速度在30~90km/h之间,其中每辆车都以一定的概率发生变道、超车、调头、停止等行为,车辆的总个数在100~400个之间变化。We use MATLAB for simulation experiments. In order to make the experimental scene close to the real situation, we first draw a 1000×1000 network topology scene as shown in Figures 1 and 2, which includes 6 horizontal bidirectional lanes, 6 vertical bidirectional lanes, and an intersection. Vehicles are randomly generated on the road, and the maximum moving speed of the vehicle is between 30 and 90 km/h. Each vehicle changes lanes, overtakes, turns around, and stops with a certain probability. The total number of vehicles is between 100 and 400. change between.
我们在所模拟的场景中将提出的GRVAD路由方法与GPSR、GPSR-R、LSPR和MM-GPSR路由方法进行比较。设置车辆最大速度为60km/h,车辆总数从100以50为步长增加到400,数据包发送率为4、8(个/s),这种情况下主要研究不同的数据包发送速率以及车辆总数对路由方法的影响。We compare the proposed GRVAD routing method with GPSR, GPSR-R, LSPR, and MM-GPSR routing methods in the simulated scenarios. The maximum speed of the vehicle is set to 60km/h, the total number of vehicles is increased from 100 to 400 in steps of 50, and the data packet transmission rate is 4 or 8 (pieces/s). In this case, different data packet transmission rates and vehicles are mainly studied. The effect of the total on the routing method.
本实例的仿真实验结果如下:The simulation results of this example are as follows:
1.不同数据包发送速率下车辆总数对数据包递交率的影响1. The influence of the total number of vehicles on the packet delivery rate under different packet sending rates
图3(a)中,源车辆每秒发送4个数据包,随着车辆总数的增加,五种路由算法的数据包递交率都有大幅的提升。从图3(a)中可以看出,GPSR-R和LSPR方法的数据包递交率较高,这是因为它们重点关注链路稳定性。GPSR方法的数据包递交率最低,这是由于它的路由转发策略单一,总是以最大步长接近目的节点,链路容易发生断裂。GRVAD路由方法综合考虑了链路稳定性和传输效率,总体上的数据包递交率略低于GPSR-R和LSPR方法,高于MM-GPSR和GPSR方法。In Figure 3(a), the source vehicle sends 4 packets per second. With the increase of the total number of vehicles, the packet delivery rate of the five routing algorithms has been greatly improved. As can be seen in Figure 3(a), the GPSR-R and LSPR methods have higher packet delivery rates because they focus on link stability. The data packet delivery rate of GPSR method is the lowest, because its routing and forwarding strategy is single, it always approaches the destination node with the largest step size, and the link is prone to breakage. The GRVAD routing method comprehensively considers link stability and transmission efficiency. The overall packet delivery rate is slightly lower than that of GPSR-R and LSPR methods, and higher than that of MM-GPSR and GPSR methods.
在图3(b)中,源车辆的发包速率为8个/s,图(b)中五种方法的数据包递交率曲线的走势和图(a)基本一致,对比相同车辆总数下每秒发8个和每秒发4个数据包时的数据包递交率可以发现,发包速率越高,数据包递交率越低。In Figure 3(b), the packet sending rate of the source vehicle is 8/s. The trend of the data packet delivery rate curve of the five methods in Figure (b) is basically the same as that in Figure (a). Compared with the same total number of vehicles per second The packet delivery rate when sending 8 and 4 packets per second shows that the higher the packet sending rate, the lower the packet delivery rate.
2.不同数据包发送速率下车辆总数对平均端到端时延的影响2. The influence of the total number of vehicles on the average end-to-end delay under different packet sending rates
由图4(a)可以看出,道路中的车辆密度越高,找到合适的下一跳转发节点越容易,因此车辆总数越大,平均端到端时延都越低。但GPSR方法的平均端到端时延在车辆总数为250个时高于车辆总数为200时,这是由于GPSR方法相对容易发生路由空洞导致进入周边转发模式,因此增加了时延。It can be seen from Figure 4(a) that the higher the vehicle density on the road, the easier it is to find a suitable next-hop forwarding node, so the larger the total number of vehicles, the lower the average end-to-end delay. However, the average end-to-end delay of the GPSR method is higher when the total number of vehicles is 250 than when the total number of vehicles is 200. This is because the GPSR method is relatively prone to routing holes, which leads to the peripheral forwarding mode, thus increasing the delay.
由图4(b)可以看出,当数据包发送速率增加时,各个方法的平均端到端时延均有一定程度的增加,但影响不大。端到端时延是由目的车辆收到的数据包的时延总和除以收到的数据包个数得到的,而发包频率过快会导致数据包无法到达目的车辆,这些丢弃的数据包不被计数,因此平均端到端时延均有一定程度的增加但总体趋势不变。It can be seen from Figure 4(b) that when the data packet sending rate increases, the average end-to-end delay of each method increases to a certain extent, but the effect is not significant. The end-to-end delay is obtained by dividing the sum of the delays of the data packets received by the destination vehicle by the number of received data packets. If the packet sending frequency is too fast, the data packets cannot reach the destination vehicle. are counted, so the average end-to-end delay increases to a certain extent but the overall trend remains the same.
3.不同数据包发送速率下车辆总数对平均端到端跳数的影响3. The influence of the total number of vehicles on the average end-to-end hops under different packet sending rates
由图5(a)、(b)可以看出不同的数据包发送速率对平均端到端跳数影响不大,车辆总数的变化对跳数影响也不大,各个方法的平均端到端跳数都相对稳定,本文提出的方法的跳数总体上最少,这是因为它考虑了多种路由判据,下一跳选择更为合理。From Figure 5(a) and (b), it can be seen that different packet sending rates have little effect on the average end-to-end hop count, and changes in the total number of vehicles have little effect on the hop count. The average end-to-end hop count of each method The number of hops is relatively stable, and the method proposed in this paper has the least number of hops on the whole, because it considers a variety of routing criteria, and the next hop selection is more reasonable.
4.不同数据包发送速率下车辆最大速度对数据包递交率的影响4. The influence of the maximum speed of the vehicle on the data packet delivery rate under different data packet sending rates
图6(a)为源车辆每秒发送4个数据包时车辆最大速度和五种方法的数据包递交率的关系曲线,由图,当车辆移动速度增加时,五种路由方法的数据包递交率均体现出不同程度的减少。GPSR-R和LSPR方法的递交率较高,因为它们只追求链路质量,链路稳定性较好;GPSR方法的递交率最低,因为它选择的下一跳节点通常位于通信半径的边界附近,容易发生链路断裂;GRVAD方法考虑了速度因素且增加了邻居节点位置预测,提高了路由准确性,因此它的递交率优于GPSR和MM-GPSR方法,略次于GPSR-R和LSPR方法。从图6(b)中可以看出,增加发包的速率会使得数据包递交率略微下降但总体趋势不变。Figure 6(a) shows the relationship between the maximum speed of the vehicle and the packet delivery rate of the five methods when the source vehicle sends 4 packets per second. From the figure, when the vehicle moving speed increases, the packet delivery rate of the five routing methods The rates all showed varying degrees of reduction. The delivery rate of GPSR-R and LSPR methods is higher because they only pursue link quality and link stability is better; GPSR method has the lowest delivery rate because the next hop node it selects is usually located near the boundary of the communication radius, Link breaks are prone to occur; the GRVAD method considers the speed factor and increases the location prediction of neighbor nodes, which improves the routing accuracy, so its delivery rate is better than GPSR and MM-GPSR methods, and slightly inferior to GPSR-R and LSPR methods. As can be seen from Figure 6(b), increasing the packet sending rate will slightly decrease the packet delivery rate but the overall trend remains unchanged.
5.不同数据包发送速率下车辆最大速度对平均端到端时延的影响5. The influence of the maximum vehicle speed on the average end-to-end delay under different data packet sending rates
从图7(a)、(b)中看出,当车辆移动速度增加时,各个路由方法的平均端到端时延均体现出不同程度的增加。总体上,GPSR-R和LSPR方法的时延较高,明显高于其他方法,这是因为优先考虑链路质量其实一定程度上是以牺牲时延为代价的。在车辆节点移动速度较慢时,MM-GPSR方法的时延性能略优于GRVAD方法,这是因为GRVAD方法因考虑了多种路由判据而较为复杂;当节点速度变快后,GRVAD方法转发策略考虑速度因素的优势就体现出来了,车速达到60km/h后,GRVAD方法的时延性能要优于MM-GPSR方法;总体上,GRVAD方法的端到端时延性能表现最好。It can be seen from Figure 7(a) and (b) that when the vehicle moving speed increases, the average end-to-end delay of each routing method shows a different degree of increase. In general, the delays of GPSR-R and LSPR methods are higher, significantly higher than other methods, because prioritizing link quality actually comes at the expense of delay to a certain extent. When the speed of the vehicle node is slow, the delay performance of the MM-GPSR method is slightly better than that of the GRVAD method. This is because the GRVAD method is more complicated due to the consideration of various routing criteria; when the node speed becomes faster, the GRVAD method forwards The advantage of the strategy considering the speed factor is reflected. When the vehicle speed reaches 60km/h, the delay performance of the GRVAD method is better than that of the MM-GPSR method; in general, the end-to-end delay performance of the GRVAD method is the best.
6.不同数据包发送速率下车辆最大速度对平均端到端跳数的影响6. The influence of the maximum vehicle speed on the average end-to-end hops under different packet sending rates
图8(a)、(b)分别是每秒发送4、8个数据包时,不同的车辆最大速度对应的平均端到端跳数。从图8中可以看出,不同的数据包发送速率对平均端到端跳数影响不大,由于本文提出的路由方法考虑多种路由判据并且有更准确的邻居节点位置信息,所以下一跳节点选择最为合理,转发跳数总体上最少。而GPSR、MM-GPSR和GPSR-R方法都可能由于遭遇路由空洞而进入周边转发模式,所以平均端到端跳数都不太稳定。Figures 8(a) and (b) are the average end-to-end hops corresponding to different vehicle maximum speeds when 4 and 8 packets are sent per second, respectively. As can be seen from Figure 8, different packet sending rates have little effect on the average end-to-end hop count. Since the routing method proposed in this paper considers multiple routing criteria and has more accurate neighbor node location information, the next step The selection of hop nodes is the most reasonable, and the number of forwarding hops is generally the least. However, the GPSR, MM-GPSR and GPSR-R methods may enter the peripheral forwarding mode due to encountering routing holes, so the average end-to-end hops are not stable.
7.实际应用场景的测试与分析7. Test and analysis of actual application scenarios
实际场景为天津市津涞公路与秀川路交汇处的十字路口,如图9所示,横向为双向6车道,纵向为双向4车道,横向纵向道路的长均为1000m,源车辆每秒发送4个数据包,车辆总数为250辆,车辆在道路中的最大速度在30~90km/h之间,在十字路口交汇处的时速为20~40km/h。The actual scene is the intersection of Tianjin Jinlai Highway and Xiuchuan Road. As shown in Figure 9, there are 6 two-way lanes in the horizontal direction and 4 two-way lanes in the vertical direction. The length of the horizontal and vertical roads is 1000m. The total number of vehicles is 250, and the maximum speed of vehicles on the road is between 30 and 90 km/h, and the speed at the intersection is 20 to 40 km/h.
图10为该场景下,车辆最大速度与平均端到端时延的关系曲线。图11为该场景下,车辆最大速度与数据包递交率的关系曲线。由图10、图11可知,GPSR-R和LSPR在数据包递交率方面的表现较好,在平均端到端时延方面的表现较差。GPSR和MM-GPSR在平均端到端时延方面的表现较好,在数据包递交率方面的表现较差。本文提出的GRVAD方法在真实场景下的端到端时延表现最好,数据包递交率表现略差于GPSR-R和LSPR,但高于GPSR和MM-GPSR。GRVAD在使得平均端到端时延最低的情况下,兼顾了数据包递交率,总体性能表现均衡合理,符合实际场景下车辆自组织网络中车辆之间的通信要求。Figure 10 shows the relationship between the maximum vehicle speed and the average end-to-end delay in this scenario. Figure 11 shows the relationship between the maximum speed of the vehicle and the data packet delivery rate in this scenario. It can be seen from Figure 10 and Figure 11 that GPSR-R and LSPR have better performance in terms of packet delivery rate and poorer performance in terms of average end-to-end delay. GPSR and MM-GPSR perform better in terms of average end-to-end delay, and poorer in terms of packet delivery rate. The GRVAD method proposed in this paper has the best end-to-end latency performance in real scenarios, and the packet delivery rate performance is slightly worse than GPSR-R and LSPR, but higher than GPSR and MM-GPSR. GRVAD takes into account the packet delivery rate while keeping the average end-to-end delay at the lowest level. The overall performance is balanced and reasonable, which meets the communication requirements between vehicles in the vehicle self-organizing network in actual scenarios.
Claims (1)
Translated fromChinese































Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110642777.8ACN113382382B (en) | 2021-06-09 | 2021-06-09 | A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization Strategy |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110642777.8ACN113382382B (en) | 2021-06-09 | 2021-06-09 | A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization Strategy |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113382382A CN113382382A (en) | 2021-09-10 |
| CN113382382Btrue CN113382382B (en) | 2022-06-10 |
Family
ID=77573226
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110642777.8AExpired - Fee RelatedCN113382382B (en) | 2021-06-09 | 2021-06-09 | A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization Strategy |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113382382B (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114608590B (en)* | 2022-03-09 | 2024-04-30 | 吉林大学 | A multi-vehicle tracking method based on intelligent reflective surface in harsh environment |
| CN115065957B (en)* | 2022-06-08 | 2025-02-14 | 重庆邮电大学 | A distributed vehicle traffic management method under vehicle-mounted self-organizing network |
| CN115087069B (en)* | 2022-06-28 | 2024-06-07 | 重庆大学 | Adaptive geographic location routing method based on link duration |
| CN117793844B (en)* | 2024-02-27 | 2024-05-28 | 南京邮电大学 | A Geographic Location Routing Method Based on Fuzzy Logic |
| CN118695322B (en)* | 2024-08-27 | 2024-12-03 | 华东交通大学 | A secure routing method for Internet of Vehicles integrating identity trust and geographic location information |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011133016A2 (en)* | 2010-04-20 | 2011-10-27 | Dr Ir Tee Clarence Augustine Teck Huo | Junction adaptive reactive routing (jarr) protocol for vehicular ad-hoc networks in a city environment [1-3]. |
| CN110049527B (en)* | 2019-04-19 | 2021-09-03 | 厦门大学 | Method and system for defining Internet of vehicles routing based on software |
- 2021
- 2021-06-09CNCN202110642777.8Apatent/CN113382382B/ennot_activeExpired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| 基于模糊逻辑控制的贪婪转发策略改进;管伟等;《计算机应用研究》;20110115(第01期);全文* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113382382A (en) | 2021-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113382382B (en) | A Vehicle Ad Hoc Network Routing Method Based on Fuzzy Logic Optimization Strategy | |
| Chen et al. | ASGR: An artificial spider-web-based geographic routing in heterogeneous vehicular networks | |
| CN106961707B (en) | A Multi-Factor Decision Routing Protocol Based on Connectivity in VANET | |
| CN105208616B (en) | Adaptive more copy method for routing based on road topology in vehicular ad hoc network | |
| CN103200526B (en) | A kind of method of the vehicular ad hoc network route based on roadside base station | |
| CN103945486B (en) | Multiple-objection optimization data transferring method based on mobile node track | |
| CN104640168B (en) | Vehicular ad hoc network method for routing based on Q study | |
| Kim et al. | Navopt: Navigator assisted vehicular route optimizer | |
| CN104080056B (en) | The message distributing method of the vehicular ad hoc network perceived based on degree of communication probability | |
| CN109640369B (en) | A Reliable Communication Method for Vehicle Network Based on Adaptive Power | |
| CN115802314B (en) | Dynamic routing method and device for vehicle-mounted self-organizing network in C-V2X environment | |
| Zhang et al. | A kind of novel RSAR protocol for mobile vehicular ad hoc network | |
| CN103281742A (en) | Vehicular Ad hoc network routing method based on autonomously acquired road information | |
| CN107181640B (en) | The acquisition methods of car networking connectivity index under a kind of urban road scene | |
| CN103095593B (en) | The route system of vehicular ad hoc network and method | |
| He et al. | A stable routing protocol for highway mobility over vehicular ad-hoc networks | |
| Shahi et al. | A comparative study on efficient path finding algorithms for route planning in smart vehicular networks | |
| CN118590962A (en) | A multi-path routing method for Internet of Vehicles based on deep reinforcement learning | |
| CN117711173A (en) | Vehicle path planning method and system based on reinforcement learning | |
| Paul et al. | An intelligent traffic signal management strategy to reduce vehicles CO2 emissions in fog oriented VANET | |
| CN108811022A (en) | A kind of dynamic high-efficiency method for routing towards vehicle net application environment | |
| Cao et al. | ETCS: An efficient traffic congestion scheduling scheme combined with edge computing | |
| Yang et al. | Autonomic navigation system based on predicted traffic and VANETs | |
| Wu et al. | An efficient adaptive intelligent routing system for multi‐intersections | |
| CN114629840A (en) | Reliable Internet of vehicles data transmission method based on crowd sensing strategy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20220610 |