CN113110098B - Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithm - Google Patents
Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithmDownload PDFInfo
- Publication number
- CN113110098B CN113110098BCN202110230315.5ACN202110230315ACN113110098BCN 113110098 BCN113110098 BCN 113110098BCN 202110230315 ACN202110230315 ACN 202110230315ACN 113110098 BCN113110098 BCN 113110098B
- Authority
- CN
- China
- Prior art keywords
- measurement data
- data
- module
- simulation
- guidance information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004088simulationMethods0.000titleclaimsabstractdescription147
- 230000004927fusionEffects0.000titleclaimsabstractdescription79
- 238000012795verificationMethods0.000titleclaimsabstractdescription13
- 238000005259measurementMethods0.000claimsabstractdescription165
- 238000007499fusion processingMethods0.000claimsabstractdescription51
- 238000004891communicationMethods0.000claimsdescription55
- 238000012545processingMethods0.000claimsdescription33
- 230000005540biological transmissionEffects0.000claimsdescription20
- 230000033001locomotionEffects0.000claimsdescription14
- 238000000034methodMethods0.000claimsdescription14
- 230000008569processEffects0.000claimsdescription7
- 230000002093peripheral effectEffects0.000claimsdescription6
- 230000007613environmental effectEffects0.000claimsdescription3
- 230000003993interactionEffects0.000claimsdescription3
- 238000012360testing methodMethods0.000description16
- 238000010586diagramMethods0.000description6
- 230000010354integrationEffects0.000description6
- 230000008859changeEffects0.000description4
- 238000002474experimental methodMethods0.000description4
- 230000003287optical effectEffects0.000description4
- 230000009471actionEffects0.000description3
- 230000000694effectsEffects0.000description3
- 238000005516engineering processMethods0.000description3
- 230000009286beneficial effectEffects0.000description2
- 238000005094computer simulationMethods0.000description2
- 230000006870functionEffects0.000description2
- 230000001934delayEffects0.000description1
- 238000011161developmentMethods0.000description1
- 239000000284extractSubstances0.000description1
- 230000007246mechanismEffects0.000description1
- 238000012856packingMethods0.000description1
- 238000007781pre-processingMethods0.000description1
- 238000012113quantitative testMethods0.000description1
- 238000012552reviewMethods0.000description1
- 238000005070samplingMethods0.000description1
- 238000006467substitution reactionMethods0.000description1
Images




Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B17/00—Systems involving the use of models or simulators of said systems
- G05B17/02—Systems involving the use of models or simulators of said systems electric
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于精确制导技术领域,具体涉及制导信息融合算法的通用化半实物仿真验证系统。The invention belongs to the technical field of precision guidance, and in particular relates to a generalized semi-physical simulation verification system of a guidance information fusion algorithm.
背景技术Background technique
随着航空技术的不断进步,卫星之间以及卫星与地面之间通信技术的发展,空天地信息一体化的信息获取方式逐渐成为飞行器制导领域中获取信息的趋势。在空天地信息一体化技术中,对空、天、地三方面的制导信息的融合是非常关键的环节,融合算法的优劣直接影响制导精确性,因此有必要在融合算法投入使用之前对融合算法进行充分的测试。With the continuous progress of aviation technology and the development of communication technology between satellites and between satellites and the ground, the information acquisition method of the integration of air-space-ground information has gradually become the trend of information acquisition in the field of aircraft guidance. In the air-space-ground information integration technology, the fusion of the guidance information of the air, sky and ground is a very critical link. The quality of the fusion algorithm directly affects the guidance accuracy. Therefore, it is necessary to fuse the fusion algorithm before it is put into use. Algorithms are fully tested.
现有的制导信息融合算法测试系统中,往往仅在空天地之一的单个平台下对飞行器搭载的多种传感器量测数据进行基于软件仿真的融合测试,而单平台测试无法满足当前空天地信息一体化趋势下对信息融合算法的测试需求,且限制了信息融合算法的应用场景,通用化性能差;此外,纯软件仿真的方式中,数据的传输均是在计算机内部实现的,对于真实外场应用中数据传输的速率和算法处理的实时性无法进行验证。In the existing guidance information fusion algorithm test system, the fusion test based on software simulation is often only performed on the measurement data of various sensors carried by the aircraft under a single platform of one of the air, space and ground, and the single platform test cannot meet the current air, space and ground information. Under the trend of integration, the testing requirements for information fusion algorithms limit the application scenarios of information fusion algorithms, resulting in poor generalization performance; in addition, in the pure software simulation method, the data transmission is realized inside the computer, and for real external fields The rate of data transmission in the application and the real-time performance of the algorithm processing cannot be verified.
因此,对于如何在实验室阶段实现对制导信息融合算法进行有效验证,现有技术中尚没有切实可行的方案。Therefore, there is no practical solution in the prior art for how to effectively verify the guidance information fusion algorithm in the laboratory stage.
发明内容SUMMARY OF THE INVENTION
为了解决现有技术中所存在的上述技术问题,本发明提供了一种制导信息融合算法的通用化半实物仿真验证系统。In order to solve the above technical problems existing in the prior art, the present invention provides a generalized hardware-in-the-loop simulation verification system for a guidance information fusion algorithm.
本发明要解决的技术问题通过以下技术方案实现:The technical problem to be solved by the present invention is realized by the following technical solutions:
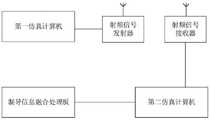
一种制导信息融合算法的通用化半实物仿真验证系统,包括:第一仿真计算机、第二仿真计算机、射频信号接收器、射频信号发射器以及制导信息融合处理板;其中,A generalized hardware-in-the-loop simulation verification system for a guidance information fusion algorithm, comprising: a first simulation computer, a second simulation computer, a radio frequency signal receiver, a radio frequency signal transmitter, and a guidance information fusion processing board; wherein,
所述第一仿真计算机,用于仿真第一量测数据,将所述第一量测数据通过第一通信接口发送至所述射频信号发射器;其中,所述第一量测数据包括卫星量测数据、侦察机量测数据以及地面雷达情报网量测数据中的至少两种;The first simulation computer is used for simulating the first measurement data, and sending the first measurement data to the radio frequency signal transmitter through the first communication interface; wherein, the first measurement data includes satellite data at least two of the measurement data, reconnaissance aircraft measurement data, and ground radar intelligence network measurement data;
所述射频信号发射器,用于将所述第一仿真计算机发来的所述第一量测数据发射到无线信道中进行传输,以使所述射频信号接收器接收所述第一量测数据;The radio frequency signal transmitter is used to transmit the first measurement data sent by the first simulation computer to a wireless channel for transmission, so that the radio frequency signal receiver can receive the first measurement data ;
所述第二仿真计算机,用于通过第二通信接口从所述射频信号接收器获取所述第一量测数据;仿真第二量测数据,并模拟综控机生成综控机控制信息;将所述第一量测数据、所述第二量测数据以及所述综控机控制信息通过以太网接口发送至所述制导信息融合处理板;其中,所述第二量测数据包括雷达传感器量测数据、红外传感器量测数据以及激光传感器量测数据中的一种或多种;The second simulation computer is used for acquiring the first measurement data from the radio frequency signal receiver through the second communication interface; simulating the second measurement data, and simulating the integrated control machine to generate the control information of the integrated control machine; The first measurement data, the second measurement data and the control information of the integrated control machine are sent to the guidance information fusion processing board through an Ethernet interface; wherein the second measurement data includes radar sensor data One or more of measurement data, infrared sensor measurement data and laser sensor measurement data;
所述制导信息融合处理板,用于按照所述综控机控制信息执行配置操作;利用待验证的制导信息融合算法对所述第一量测数据和所述第二量测数据进行融合处理,并将融合数据通过所述以太网接口发送至所述第二仿真计算机;The guidance information fusion processing board is used to perform configuration operations according to the control information of the integrated control machine; use the guidance information fusion algorithm to be verified to perform fusion processing on the first measurement data and the second measurement data, and sending the fusion data to the second simulation computer through the Ethernet interface;
所述第二仿真计算机,还用于根据所述融合数据,模拟综控机生成伺服控制指令,并模拟导引头伺服系统执行所述伺服控制指令,以根据执行结果仿真新的第二量测数据并模拟综控机生成新的综控机控制信息。The second simulation computer is further configured to simulate the integrated control machine to generate servo control instructions according to the fusion data, and simulate the seeker servo system to execute the servo control instructions, so as to simulate a new second measurement according to the execution result. Data and simulate the integrated control machine to generate new integrated control machine control information.
在一个实施例中,所述第二仿真计算机安装有客户端软件;所述客户端软件包括:配置模块、特征数据加载模块、仿真模块、第一模拟模块、第二模拟模块和显示模块;其中,In one embodiment, the second simulation computer is installed with client software; the client software includes: a configuration module, a feature data loading module, a simulation module, a first simulation module, a second simulation module and a display module; wherein ,
所述配置模块,用于配置仿真参数;所述仿真参数包括:外场环境下的环境参数、干扰类型及干扰参数、飞行器和目标的运动状态参数,以及导引头的传感器种类;The configuration module is used to configure simulation parameters; the simulation parameters include: environmental parameters, interference types and interference parameters in the external field environment, motion state parameters of the aircraft and the target, and sensor types of the seeker;
所述特征数据加载模块,用于加载所述目标的特征信息;the feature data loading module for loading feature information of the target;
所述仿真模块,用于基于所述仿真参数和所述目标的特征信息仿真所述第二量测数据;the simulation module for simulating the second measurement data based on the simulation parameters and the characteristic information of the target;
所述第一模拟模块,用于模拟综控机生成所述综控机控制信息和所述伺服控制指令;The first simulation module is used to simulate the integrated control machine to generate the integrated control machine control information and the servo control instruction;
所述第二模拟模块,用于模拟导引头伺服系统执行所述伺服控制指令;The second simulation module is used to simulate the seeker servo system to execute the servo control instruction;
所述显示模块,用于基于所述融合数据显示末制导过程中所述飞行器和所述目标的飞行轨迹。The display module is configured to display the flight trajectories of the aircraft and the target in the terminal guidance process based on the fusion data.
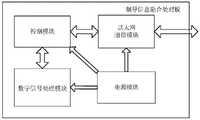
在一个实施例中,所述制导信息融合处理板,包括:以太网通信模块、控制模块、数字信号处理模块和电源模块;其中,In one embodiment, the guidance information fusion processing board includes: an Ethernet communication module, a control module, a digital signal processing module and a power supply module; wherein,
所述以太网通信模块,用于与所述第二仿真计算机进行通信实现数据交互;The Ethernet communication module is used to communicate with the second simulation computer to realize data interaction;
所述控制模块,用于按照所述综控机控制信息执行配置操作,并控制所述以太网通信模块和所述数字信号处理模块之间的数据发送与接收;the control module, configured to perform configuration operations according to the control information of the integrated control machine, and to control data transmission and reception between the Ethernet communication module and the digital signal processing module;
所述数字信号处理模块,用于加载待验证的制导信息融合算法,并利用所述制导信息融合算法对所述第一量测数据和所述第二量测数据进行融合处理;The digital signal processing module is used to load the guidance information fusion algorithm to be verified, and use the guidance information fusion algorithm to perform fusion processing on the first measurement data and the second measurement data;
所述电源模块,用于为所述以太网通信模块、所述控制模块以及所述数字信号处理模块提供电源。The power module is used to provide power for the Ethernet communication module, the control module and the digital signal processing module.
在一个实施例中,所述数字信号处理模块,包括:DSP(Digital SignalProcessing,数字信号处理器)芯片以及与所述DSP芯片匹配的外围电路。In one embodiment, the digital signal processing module includes: a DSP (Digital Signal Processing, digital signal processor) chip and a peripheral circuit matched with the DSP chip.
在一个实施例中,所述第一通信接口和所述第二通信接口均为通用串行总线(Universal Serial Bus,USB)接口;所述以太网接口为千兆以太网接口。In an embodiment, the first communication interface and the second communication interface are both Universal Serial Bus (Universal Serial Bus, USB) interfaces; the Ethernet interface is a Gigabit Ethernet interface.
在一个实施例中,所述射频信号接收器和所述射频信号发射器均为ADALM-PLUTO软件定义无线电射频传输器。In one embodiment, the radio frequency signal receiver and the radio frequency signal transmitter are both ADALM-PLUTO software-defined radio frequency transmitters.
在一个实施例中,所述第二仿真计算机仿真所述第二量测数据时的数据率为需要模拟的至少一个传感器的数据率的公约数。In one embodiment, the data rate when the second simulation computer simulates the second measurement data is a common divisor of the data rate of the at least one sensor to be simulated.
本发明提供的制导信息融合算法的通用化半实物仿真验证系统的有益效果如下:The beneficial effects of the generalized hardware-in-the-loop simulation verification system of the guidance information fusion algorithm provided by the present invention are as follows:
(1)本发明中,制导信息融合处理板中所处理的数据与第一仿真计算机、第二仿真计算机中原始仿真的数据进行了硬件隔离;并且,本发明通过射频信号发射器和射频信号接收器对制导信息融合处理板待处理的数据在无线信道中进行了传输;综合以上两点,本发明模拟了真实外场应用中数据的传输方式,从而可以对数据传输的速率和算法处理的实时性进行验证。并且,本发明中第二仿真计算机与制导信息融合处理板通过以太网接口进行通信,传输速率较高,提高了测试效果的实时性。(1) In the present invention, the data processed in the guidance information fusion processing board and the data of the original simulation in the first simulation computer and the second simulation computer are hardware isolated; The device transmits the data to be processed by the guidance information fusion processing board in the wireless channel; combining the above two points, the present invention simulates the data transmission mode in the real field application, so that the speed of data transmission and the real-time performance of algorithm processing can be measured. authenticating. Moreover, in the present invention, the second simulation computer communicates with the guidance information fusion processing board through the Ethernet interface, the transmission rate is high, and the real-time performance of the test effect is improved.
(2)本发明使用第一仿真计算机仿真卫星量测数据、侦察机量测数据以及地面雷达情报网量测数据中的至少两种,通过仿真不同类型的第一量测数据,能够为空、天、地三种外场环境的任意组合下的外场环境提供原始数据,具有较高的通用性。并且,本发明还使用第二仿真计算机对飞行器所在的弹载平台的各种传感器量测数据进行了仿真,可以进一步为空天地一体化架构下的信息融合算法验证提供数据支持,在增加了数据获取渠道的同时,也提高了测试系统的通用性;并且,本发明可根据导引头搭载的传感器类型在第二仿真计算机中选择仿真一种或多种类型的传感器量测数据,即第二量测数据,进一步提高了测试系统的通用性。(2) The present invention uses at least two of the first simulation computer to simulate satellite measurement data, reconnaissance aircraft measurement data, and ground radar intelligence network measurement data, and by simulating different types of first measurement data, it can be empty, The external field environment under any combination of the three external field environments of the sky and the earth provides the original data, which has high versatility. In addition, the present invention also uses the second simulation computer to simulate the measurement data of various sensors of the missile-borne platform where the aircraft is located, which can further provide data support for the verification of the information fusion algorithm under the air-space-ground integration framework. While acquiring the channel, the versatility of the test system is also improved; and the present invention can select and simulate one or more types of sensor measurement data in the second simulation computer according to the sensor type carried by the seeker, that is, the second simulation computer. The measurement data further improves the versatility of the test system.
(3)本发明中,制导信息融合处理板作为通用的数据处理平台为制导信息融合算法的测试提供了硬件平台,适用于各种不同的制导信息融合算法,通用性较高,可以部分替代外场实验,从而节省外场实验的时间周期和成本。(3) In the present invention, the guidance information fusion processing board, as a general data processing platform, provides a hardware platform for the test of guidance information fusion algorithms, is suitable for various guidance information fusion algorithms, has high versatility, and can partially replace the external field Experiments, thereby saving the time period and cost of field experiments.
以下将结合附图及对本发明做进一步详细说明。The present invention will be further described in detail below with reference to the accompanying drawings.
附图说明Description of drawings
图1是本发明实施例提供的一种制导信息融合算法的通用化半实物仿真验证系统的结构示意图;1 is a schematic structural diagram of a generalized hardware-in-the-loop simulation verification system for a guidance information fusion algorithm provided by an embodiment of the present invention;
图2是本发明实施例中仿真第一量测数据的坐标示意图;2 is a schematic diagram of coordinates of simulated first measurement data in an embodiment of the present invention;
图3是本发明实施例中仿真第二量测数据的坐标示意图;3 is a schematic diagram of coordinates of simulated second measurement data in an embodiment of the present invention;
图4是本发明实施例中制导信息融合处理板的结构示意图;4 is a schematic structural diagram of a guidance information fusion processing board in an embodiment of the present invention;
图5是示例性示出的一种制导信息融合算法的流程图;FIG. 5 is a flowchart of a guidance information fusion algorithm exemplarily shown;
图6是本发明实施例中的数据流向图;6 is a data flow diagram in an embodiment of the present invention;
图7是飞行器搭载的传感器的伺服小回路的示意图。FIG. 7 is a schematic diagram of a small servo loop of a sensor mounted on an aircraft.
具体实施方式Detailed ways
下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。The present invention will be described in further detail below with reference to specific embodiments, but the embodiments of the present invention are not limited thereto.
为了在实验室阶段实现对制导信息融合算法进行有效验证,本发明实施例提供了一种制导信息融合算法的通用化半实物仿真验证系统,参见图1所示,该系统包括:第一仿真计算机、第二仿真计算机、射频信号接收器、射频信号发射器以及制导信息融合处理板。其中,第一仿真计算机通过第一通信接口与射频信号发射器实现通信连接,第二仿真计算机通过第二通信接口与射频信号接收器实现通信连接,第二仿真计算机与制导信息融合处理板通过以太网接口实现通信连接。In order to effectively verify the guidance information fusion algorithm in the laboratory stage, the embodiment of the present invention provides a generalized hardware-in-the-loop simulation verification system for the guidance information fusion algorithm. Referring to FIG. 1, the system includes: a first simulation computer , a second simulation computer, a radio frequency signal receiver, a radio frequency signal transmitter and a guidance information fusion processing board. Wherein, the first simulation computer realizes communication connection with the radio frequency signal transmitter through the first communication interface, the second simulation computer realizes communication connection with the radio frequency signal receiver through the second communication interface, and the second simulation computer and the guidance information fusion processing board communicate with each other through the Ethernet The network interface realizes the communication connection.
接下来将对该系统中的各组成部分进行详细说明:Next, each component in the system will be described in detail:
第一仿真计算机,用于仿真第一量测数据,将第一量测数据通过第一通信接口发送至射频信号发射器;其中,第一量测数据包括卫星量测数据、侦察机量测数据以及地面雷达情报网量测数据中的至少两种。The first simulation computer is used to simulate the first measurement data and send the first measurement data to the radio frequency signal transmitter through the first communication interface; wherein the first measurement data includes satellite measurement data and reconnaissance aircraft measurement data and at least two of the measured data from the ground-based radar intelligence network.
其中,卫星量测数据可以包括飞行器的定位经纬度信息,侦察机量测数据可以包括飞行器的径向距离、角度和速度信息;地面雷达情报网量测数据可以包括飞行器的径向距离、角度和速度信息。其中,飞行器可以是火箭、无人机或者导弹等。并且,当飞行器为导弹或无人机等具有目标追踪功能的飞行器时,卫星量测数据还可以包括目标的定位经纬度信息,侦察机量测数据还可以包括目标的径向距离、角度和速度信息,地面雷达情报网量测数据还可以包括目标的径向距离、角度和速度信息。Among them, the satellite measurement data may include the positioning latitude and longitude information of the aircraft, the reconnaissance aircraft measurement data may include the aircraft's radial distance, angle and speed information; the ground radar information network measurement data may include the aircraft's radial distance, angle and speed information. The aircraft may be a rocket, an unmanned aerial vehicle, or a missile. Moreover, when the aircraft is an aircraft with a target tracking function such as a missile or an unmanned aerial vehicle, the satellite measurement data can also include the positioning latitude and longitude information of the target, and the reconnaissance aircraft measurement data can also include the radial distance, angle and speed information of the target. , the ground radar intelligence network measurement data can also include the target's radial distance, angle and speed information.
在实际应用中,可以在第一仿真计算机中模拟现有的天基平台信息系统中所能够获取的量测数据来仿真本发明实施例中的卫星量测数据,模拟现有的空基平台信息系统中所能够获取的量测数据来仿真本发明实施例中侦察机量测数据,以及模拟现有的地基平台信息系统所能够获取的量测数据来仿真本发明实施例中的地面雷达情报网量测数据。In practical applications, the measurement data that can be obtained in the existing space-based platform information system can be simulated in the first simulation computer to simulate the satellite measurement data in the embodiment of the present invention, and the existing space-based platform information can be simulated The measurement data that can be obtained in the system is used to simulate the measurement data of the reconnaissance aircraft in the embodiment of the present invention, and the measurement data that can be obtained by the existing ground-based platform information system is simulated to simulate the ground radar information network in the embodiment of the present invention. measurement data.
具体的仿真主要通过MATLAB软件中进行点迹仿真实现。示例性的,参见图2所示,取地基雷达情报网的主站雷达为参考坐标系的原点,OXS轴向正北方向延伸,指向北方为正方向;OZS轴向正东方向延伸,指向东方为正方向;OYS轴垂直OXSZS平面向上为正,OXSYSZS为右手系;测量飞机、目标的轨迹的坐标系,将其视为大坐标系,将机载雷达的观测坐标系视为小坐标系;FX5Y5Z5为侦察机视线坐标系,FX6Y6Z6为机体坐标系,通过FX6Y6Z6坐标系下的弹目连线,就可以获得机体坐标系下的机载雷达观测航向角、俯仰角和弹目距。The specific simulation is mainly realized by point trace simulation in MATLAB software. Exemplarily, as shown in Figure 2, the main station radar of the ground-based radar intelligence network is taken as the origin of the reference coordinate system, the OXS axis extends in the true north direction, and the north direction is the positive direction; the OZS axis extends in the due east direction, Pointing to the east is the positive direction; the OYS axis is vertical to the OXS ZS plane is upward, and the OXS YS ZS is the right-handed system; the coordinate system for measuring the trajectory of the aircraft and the target is regarded as a large coordinate system, and the airborne The observation coordinate system of the radar is regarded as a small coordinate system; FX5 Y5 Z5 is thesight coordinate system of the reconnaissance plane, and FX6 Y6 Z6 is the body coordinate system. , the heading angle, pitch angle and projectile distance of the airborne radar observation in the airframe coordinate system can be obtained.
可以理解的是,第一仿真计算机将第一量测数据发送给射频信号发射器时,需要按照第一通信接口的接口协议对第一量测数据进行编码和调制,以便通过第一通信接口将第一量测数据发送给射频信号发射器。It can be understood that when the first simulation computer sends the first measurement data to the radio frequency signal transmitter, it needs to encode and modulate the first measurement data according to the interface protocol of the first communication interface, so that the first measurement data can be transmitted through the first communication interface. The first measurement data is sent to the radio frequency signal transmitter.
射频信号发射器,用于将第一仿真计算机发来的第一量测数据发射到无线信道中进行传输,以使射频信号接收器接收第一量测数据。The radio frequency signal transmitter is used for transmitting the first measurement data sent by the first simulation computer to the wireless channel for transmission, so that the radio frequency signal receiver can receive the first measurement data.
在一种可选实现方式中,射频信号接收器和射频信号发射器均可以采用ADALM-PLUTO软件定义无线电射频传输器;这里,ADALM-PLUTO软件定义无线电射频传输器具有基本的硬件电路结构,收发载频以及发射功率等参数的设定则通过ADALM-PLUTO软件定义。In an optional implementation, both the radio frequency signal receiver and the radio frequency signal transmitter can use the ADALM-PLUTO software-defined radio frequency transmitter; here, the ADALM-PLUTO software-defined radio frequency transmitter has a basic hardware circuit structure. The settings of parameters such as carrier frequency and transmit power are defined by ADALM-PLUTO software.
或者,本发明实施例中也可以采用常规的射频信号接收器和射频信号发射器。Alternatively, conventional radio frequency signal receivers and radio frequency signal transmitters may also be used in the embodiments of the present invention.
第二仿真计算机,用于通过第二通信接口从射频信号接收器获取第一量测数据;仿真第二量测数据,并模拟综控机生成综控机控制信息;将第一量测数据、第二量测数据以及综控机控制信息通过以太网接口发送至制导信息融合处理板;其中,第二量测数据包括雷达传感器量测数据、红外传感器量测数据以及激光传感器量测数据中的一种或多种。The second simulation computer is used for obtaining the first measurement data from the radio frequency signal receiver through the second communication interface; simulating the second measurement data, and simulating the integrated control machine to generate the control information of the integrated control machine; The second measurement data and the control information of the integrated control machine are sent to the guidance information fusion processing board through the Ethernet interface; wherein the second measurement data includes the measurement data of the radar sensor, the measurement data of the infrared sensor, and the measurement data of the laser sensor. one or more.
其中,第二仿真计算机从射频信号接收器获取编码的第一量测数据后,需要按照第一通信接口的接口协议对其进行解调和解码,从而获得解码的第一量测数据。Wherein, after acquiring the encoded first measurement data from the radio frequency signal receiver, the second simulation computer needs to demodulate and decode the encoded first measurement data according to the interface protocol of the first communication interface, thereby obtaining the decoded first measurement data.
该第二仿真计算机中模拟的综控机是飞行器上搭载的模块。综控机主要用于末制导阶段控制飞行器的工作模式的切换,具体而言,根据飞行器与目标径向距离的大小,发送出对应的综控机控制信息;例如,根据径向距离的大小,判断是否到达导引头最小作用距离;如果到达最小作用距离又没有击中目标,则发送包含有开启自毁程序的工作模式切换指令的综控机控制信息。The integrated control machine simulated in the second simulation computer is a module mounted on the aircraft. The integrated control machine is mainly used to control the switching of the working mode of the aircraft in the terminal guidance stage. Specifically, according to the size of the radial distance between the aircraft and the target, the corresponding control information of the integrated control machine is sent; for example, according to the size of the radial distance, It is judged whether the minimum action distance of the seeker has been reached; if the minimum action distance is reached and the target is not hit, the integrated control machine control information containing the working mode switching instruction to start the self-destruction program is sent.
在一种优选实现方式中,可以在第二仿真计算机上安装预先开发好的客户端软件,该客户端软件可以包括:配置模块、特征数据加载模块、仿真模块、第一模拟模块、第二模拟模块和显示模块。In a preferred implementation, pre-developed client software may be installed on the second simulation computer, and the client software may include: a configuration module, a feature data loading module, a simulation module, a first simulation module, a second simulation module modules and display modules.
其中,配置模块,用于配置仿真参数,该仿真参数包括:外场环境下的环境参数、干扰类型及干扰参数、飞行器和目标的运动状态参数,以及导引头的传感器种类,并不局限于此。Among them, the configuration module is used to configure simulation parameters, and the simulation parameters include: environmental parameters in the external field environment, interference types and interference parameters, motion state parameters of the aircraft and the target, and the sensor types of the seeker, but not limited to this .
特征数据加载模块,用于加载目标的特征信息;这里,目标的特征信息包括目标的属性信息,该属性信息可用于目标的识别。The feature data loading module is used to load the feature information of the target; here, the feature information of the target includes the attribute information of the target, and the attribute information can be used for the identification of the target.
仿真模块,用于基于仿真参数和目标的特征信息仿真第二量测数据;具体而言,仿真模块按照配置好的仿真参数和目标的特征信息,建立目标和飞行器的运动方程;根据目标和飞行器的运动方程得到目标和飞行器的运动轨迹,根据运动轨迹得到相应的角度、距离和图像等理论数据,然后再在这些理论数据上加上配置模块中选好种类的传感器的量测误差,便可以得到目标在这些传感器上的量测数据,即得到第二量测数据。The simulation module is used to simulate the second measurement data based on the simulation parameters and the characteristic information of the target; specifically, the simulation module establishes the motion equations of the target and the aircraft according to the configured simulation parameters and the characteristic information of the target; according to the target and the aircraft The motion equation of the target and the aircraft can be obtained from the motion trajectories, and the corresponding theoretical data such as angles, distances and images can be obtained according to the motion trajectories. The measurement data of the target on these sensors is the second measurement data.
在实际应用中,仿真模块仿真第二量测数据可以通过在MATLAB软件中进行点迹仿真实现。以导弹举例而言,参见图3所示,取导引头进入末段开机时刻点导弹的位置M为参考坐标系的原点,选取弹壳纵轴为MX轴,指向导引头头部方向为正方向;MY轴过M点,在导弹重锤线向上,MZ轴垂直于MAY平面,MXYZ为右手系,X3OZ3是速度坐标系的水平面,X6OZ6是视线坐标系的水平面。X3OZ3的OX3轴与X1OZ1的OX1轴的夹角β为侧滑角,OX1轴逆时针旋转至OX3轴时为正,反之为负;β代表着导弹飞行方向与弹弹壳纵对称轴在水平面上的夹角。基于以上坐标的设定,模拟导弹飞行使用比例制导法来实现第二量测数据的仿真。比例制导法是在自寻的导弹上采用较多的一种导引规律,它是指在导弹飞向目标的过程中,导弹速度方向的变化率与目标视线的变化率成比例。具体而言,使用比例导引法作为原始数据仿真建模的导引律,可以得到原始数据仿真建模时所用到的导弹与目标相对运动方程组,根据相对运动方程组可以分析导弹和目标的相对运动情况以及每个时刻的坐标,通过坐标可以得到角度和距离信息,由此实现第二量测数据的仿真。In practical applications, the simulation of the second measurement data by the simulation module can be realized by performing point trace simulation in MATLAB software. Take the missile as an example, as shown in Figure 3, take the position M of the missile at the moment when the seeker enters the final stage of power-on as the origin of the reference coordinate system, select the longitudinal axis of the cartridge case as the MX axis, and point the direction of the seeker head as positive. Direction; the MY axis passes through the M point, the missile weight line is upward, the MZ axis is perpendicular to the MAY plane, MXYZ is the right-handed system, X3 OZ3 is the horizontal plane of the velocity coordinate system, and X6 OZ6 is the horizontal plane of the line of sight coordinate system. The angle β between the OX3 axis of X3 OZ3 and the OX1 axis of X1 OZ1 is the sideslip angle. When the OX1 axis rotates counterclockwise to the OX3 axis, it is positive, otherwise it is negative; β represents the flight direction of the missile The included angle in the horizontal plane with the longitudinal axis of symmetry of the cartridge case. Based on the setting of the above coordinates, the simulated missile flight uses the proportional guidance method to realize the simulation of the second measurement data. The proportional guidance method is a kind of guidance law that is used more in self-seeking missiles. It means that the rate of change of the missile's speed and direction is proportional to the rate of change of the target's line of sight during the missile's flight to the target. Specifically, by using the proportional guidance method as the guidance law of the original data simulation modeling, the relative motion equations of the missile and the target used in the original data simulation modeling can be obtained. According to the relative motion equations, the relationship between the missile and the target can be analyzed. Relative motion and coordinates at each moment, angle and distance information can be obtained through the coordinates, thereby realizing the simulation of the second measurement data.
第一模拟模块,用于模拟综控机生成综控机控制信息和伺服控制指令。The first simulation module is used for simulating the integrated control machine to generate the control information and servo control instructions of the integrated control machine.
第二模拟模块,用于模拟导引头伺服系统执行伺服控制指。The second simulation module is used for simulating the servo system of the seeker to execute the servo control instruction.
显示模块,用于基于融合数据显示末制导过程中飞行器和目标的飞行轨迹。可以理解的是,融合数据中包含有飞行器和目标每个时刻的坐标,故而根据融合数据可显示飞行器和目标的飞行轨迹。The display module is used to display the flight trajectories of the aircraft and the target during the terminal guidance process based on the fusion data. It can be understood that the fusion data contains the coordinates of the aircraft and the target at each moment, so the flight trajectories of the aircraft and the target can be displayed according to the fusion data.
可以理解的是,基于该客户端软件,用户可以在第二仿真计算机上模拟各种不同的外场环境以及加载各种不同特征的目标,从而提高了系统的通用性。It can be understood that, based on the client software, the user can simulate various external field environments and load targets with various characteristics on the second simulation computer, thereby improving the generality of the system.
此外,第二仿真计算机在仿真第二量测数据时,可以通过设置合适的仿真步长,即合理设置仿真时的数据率,以方便得到符合各个传感器的采样率的数据;优选地,第二仿真计算机仿真所述第二量测数据时的数据率为需要模拟的至少一个传感器的数据率的公约数。In addition, when simulating the second measurement data, the second simulation computer can set an appropriate simulation step size, that is, reasonably set the data rate during simulation, so as to facilitate obtaining data that conforms to the sampling rate of each sensor; preferably, the second The data rate when the simulation computer simulates the second measurement data is a common divisor of the data rate of the at least one sensor to be simulated.
制导信息融合处理板,用于按照综控机控制信息执行配置操作;利用待验证的制导信息融合算法对第一量测数据和第二量测数据进行融合处理,并将融合数据通过以太网接口发送至第二仿真计算机。The guidance information fusion processing board is used to perform configuration operations according to the control information of the integrated control machine; use the guidance information fusion algorithm to be verified to fuse the first measurement data and the second measurement data, and pass the fusion data through the Ethernet interface. sent to the second simulation computer.
如图4所示,该制导信息融合处理板包括:以太网通信模块、控制模块、数字信号处理模块和电源模块。As shown in Figure 4, the guidance information fusion processing board includes: an Ethernet communication module, a control module, a digital signal processing module and a power supply module.
其中,以太网通信模块,用于与第二仿真计算机进行通信实现数据交互。以太网通信模块主要由一片以太网协议芯片以及其外围电路组成,该以太网协议芯片将以太网协议形式的数据转换为普通的并行数据送入控制模块,并接收来自控制模块的并行数据,将并行数据转化为以太网协议形式的数据返回至第二仿真计算机。Wherein, the Ethernet communication module is used to communicate with the second simulation computer to realize data interaction. The Ethernet communication module is mainly composed of an Ethernet protocol chip and its peripheral circuits. The Ethernet protocol chip converts the data in the form of the Ethernet protocol into ordinary parallel data and sends it to the control module, and receives the parallel data from the control module. The parallel data is converted into data in the form of an Ethernet protocol and returned to the second simulation computer.
控制模块,用于按照综控机控制信息执行配置操作,并控制以太网通信模块和数字信号处理模块之间的数据发送与接收。该控制模块由一片高性能的FPGA(FieldProgrammable Gate Array,现场可编程门阵列)芯片及其外围配置电路构成,其内部包含有存储控制器和双口RAM(Random Access Memory,随机存取存储器),具有数据短暂存储功能。The control module is used to perform configuration operations according to the control information of the integrated control machine, and to control data transmission and reception between the Ethernet communication module and the digital signal processing module. The control module is composed of a high-performance FPGA (FieldProgrammable Gate Array, Field Programmable Gate Array) chip and its peripheral configuration circuit, which contains a memory controller and a dual-port RAM (Random Access Memory, random access memory) inside, With data short-term storage function.
数字信号处理模块,用于接收来自控制模块分发好的各个传感器的量测数据,对数据进行信息融合相关算法的处理,再将处理凹的融合数据再发送给控制模块。该数字信号处理模块由一片高性能的DSP芯片及其外围配置电路组成,DSP芯片的选取要根据传感器的数据率以及处理速度来合理选取。The digital signal processing module is used to receive the measurement data from each sensor distributed by the control module, process the data with information fusion related algorithms, and then send the processed concave fusion data to the control module. The digital signal processing module consists of a high-performance DSP chip and its peripheral configuration circuit. The selection of the DSP chip should be reasonably selected according to the data rate and processing speed of the sensor.
电源模块,由开关电源和电源管理芯片构成。示例性的,开关电源输入可以设置为220V交流电,输出为稳定的5V直流电,电源管理芯片负责将标准的5V直流输入转化为以太网通信模块、控制模块和信息融合处理模块内的核心芯片所需要的工作电压。The power module is composed of a switching power supply and a power management chip. Exemplarily, the input of the switching power supply can be set to 220V AC, the output is stable 5V DC, and the power management chip is responsible for converting the standard 5V DC input into the Ethernet communication module, the control module and the core chip in the information fusion processing module. operating voltage.
该制导信息融合处理板中,第二仿真计算机向以太网通信模块发送数据后,以太网通信模块按照传感器各自的数据率接收来自第二仿真计算机的数据包,并将数据发送给控制模块。与此同时,控制模块中的FPGA芯片查询以太网协议芯片的FULL信号;FULL信号表示芯片的Buffer(缓冲器)状态;如果FPGA芯片检测到以太网协议芯片的FULL信号有效,则启动数据接收;然后,FPGA芯片从数据包中抽取各种传感器量测数据,将不同种类传感器的数据暂存在不同的内部RAM里;分包完毕后,FPGA芯片根据各个传感器的数据率产生定时中断,通知与控制模块通过总线相连的数字信号处理模块的核心DSP芯片取数据。当数字信号处理模块接收到来控制模块的DSP定时中断后,进入中断服务子程序,接收来自控制模块的传感器量测数据,由于传感器自身数据率的不同,不同的传感器数据要使用不同的中断来响应;接下来,数字信号处理模块对接收到的传感器数据进行信息融合的处理;具体的,图5示例性地示出了一种制导信息融合算法的流程。需要说明的是,本发明实施例提供的系统是对制导信息融合算法进行测试的系统,本发明实施例对算法本身的融合处理细节并不做限定。DSP芯片内部的信息融合处理算法的程序可在线下载也可烧写到DSP芯片的外围FLASH中;改变制导信息融合算法的烧写程序,即可对不同的制导信息融合算法进行测试,实现硬件平台的通用化。In the guidance information fusion processing board, after the second simulation computer sends data to the Ethernet communication module, the Ethernet communication module receives the data packets from the second simulation computer according to the respective data rates of the sensors, and sends the data to the control module. At the same time, the FPGA chip in the control module queries the FULL signal of the Ethernet protocol chip; the FULL signal indicates the Buffer (buffer) state of the chip; if the FPGA chip detects that the FULL signal of the Ethernet protocol chip is valid, it starts data reception; Then, the FPGA chip extracts the measurement data of various sensors from the data packets, and temporarily stores the data of different types of sensors in different internal RAMs; after the subcontracting is completed, the FPGA chip generates timing interrupts according to the data rate of each sensor to notify and control The module takes data through the core DSP chip of the digital signal processing module connected by the bus. When the digital signal processing module receives the DSP timing interrupt from the control module, it enters the interrupt service subroutine and receives the sensor measurement data from the control module. Due to the different data rates of the sensors themselves, different sensor data should use different interrupts to respond. ; Next, the digital signal processing module performs information fusion processing on the received sensor data; specifically, FIG. 5 exemplarily shows a flow of a guidance information fusion algorithm. It should be noted that the system provided by the embodiment of the present invention is a system for testing the guidance information fusion algorithm, and the embodiment of the present invention does not limit the details of the fusion processing of the algorithm itself. The program of the information fusion processing algorithm inside the DSP chip can be downloaded online or programmed into the peripheral FLASH of the DSP chip; changing the programming program of the guidance information fusion algorithm can test different guidance information fusion algorithms to realize the hardware platform generalization.
数字信号处理模块对数据进行融合处理完成之后,其内部的DSP芯片向控制模块的FPGA芯片内部的RAM写好要发送给第二仿真计算机的数据,然后向某一特定地址写数据;控制模块内部的FPGA芯片检测到这一动作后,将数据接收到自己内部的FIFO(First InputFirst Output)中,当检测到自身的FIFO的FULL信号,则启动向以太网通信模块的数据发送。After the digital signal processing module completes the fusion processing of the data, the internal DSP chip writes the data to be sent to the second simulation computer to the RAM inside the FPGA chip of the control module, and then writes the data to a specific address; After the FPGA chip detects this action, it receives the data into its own internal FIFO (First InputFirst Output). When it detects the FULL signal of its own FIFO, it starts data transmission to the Ethernet communication module.
另外,由于数字信号处理模块处理数据的速度远高于各传感器的数据发送速率;因此,在本发明实施例中,每当数字信号处理模块将处理后的融合数据发送至以太网通信模块时,控制模块便强制控制以太网通信模块将数据发送至第二仿真计算机。并且,当以太网通信模块接收数据和发送融合数据发生冲突时,控制模块也会控制以太网通信模块优先发送融合数据。In addition, because the speed of data processing by the digital signal processing module is much higher than the data transmission rate of each sensor; therefore, in this embodiment of the present invention, whenever the digital signal processing module sends the processed fusion data to the Ethernet communication module, The control module forces the Ethernet communication module to send the data to the second simulation computer. Moreover, when there is a conflict between the Ethernet communication module receiving data and sending the fusion data, the control module will also control the Ethernet communication module to send the fusion data preferentially.
第二仿真计算机,还用于根据融合数据,模拟综控机生成伺服控制指令,并模拟导引头伺服系统执行伺服控制指令,以根据执行结果仿真新的第二量测数据并模拟综控机生成新的综控机控制信息。The second simulation computer is also used for simulating the integrated control machine to generate servo control instructions according to the fusion data, and simulating the seeker servo system to execute the servo control instructions, so as to simulate new second measurement data and simulate the integrated control machine according to the execution results. Generate new MCU control information.
其中,第二仿真计算机模拟综控机工作时,将融合数据中包含的目标的方位、距离和速度等信息发送到飞行器与目标的相对运动方程,从而选定制导率以控制飞行器的飞行,以及将融合数据中包含的跟踪角误差信号调整飞行器的电机的转动方向和速度带动传感器在一定的角度范围内运动,使传感器对准跟踪目标或以一定的速度在一定的角度范围内进行扫描;这一过程通过生成不同的伺服控制指令以及新的综控机控制信息来实现;与此同时,根据伺服控制指令的执行结果继续新一轮第二量测数据的仿真。Among them, when the second simulation computer simulates the operation of the integrated control machine, the information such as the orientation, distance and speed of the target contained in the fusion data is sent to the relative motion equation between the aircraft and the target, so as to select the guide rate to control the flight of the aircraft, and The tracking angle error signal contained in the fusion data is adjusted to the rotation direction and speed of the motor of the aircraft to drive the sensor to move within a certain angular range, so that the sensor is aligned with the tracking target or scanned within a certain angular range at a certain speed; A process is realized by generating different servo control instructions and new integrated control machine control information; at the same time, a new round of simulation of the second measurement data is continued according to the execution result of the servo control instructions.
在实际应用中,第一仿真计算机仿真的第一量测数据中的卫星量测数据、侦察机量测数据和/或地面雷达情报网量测数据各自包含有对应的延时,第一仿真计算机周期地通过无线信道向第二仿真计算机传输第一量测数据;第二仿真计算机将第一仿真计算机发来的第一量测数据和自身仿真的第二量测数据和综控机控制信息进行整合,按照以太网通信协议将整合后的数据进行打包,并设置发送时间间隔,按照不同传感器的不同数据率一帧帧的发送到制导信息融合处理板进行融合处理;融合处理完成后,第二仿真计算机接收来自制导信息融合处理板的融合数据;模拟综控机根据融合数据生成伺服控制指令,驱动客户端软件中的仿真模块进行下一轮的数据仿真及整合,继续将新一轮的数据打包发送制导信息融合处理板,以此类推循环地进行闭环式的数据仿真和传输;其中,在每一轮仿真时,第二仿真计算机安装的客户端软件中的显示模块均会实时显示飞行器和目标的运动航迹,并会将收到的第一量测数据、融合数据以及自身仿真的第二量测数据进行保存,以便后续为信息融合算法的测试结果提供定量的测试判据。In practical applications, satellite measurement data, reconnaissance aircraft measurement data and/or ground radar intelligence network measurement data in the first measurement data simulated by the first simulation computer each contain corresponding delays, and the first simulation computer Periodically transmit the first measurement data to the second simulation computer through the wireless channel; Integration, the integrated data is packaged according to the Ethernet communication protocol, and the transmission time interval is set. According to the different data rates of different sensors, one frame is sent to the guidance information fusion processing board for fusion processing; after the fusion processing is completed, the second The simulation computer receives the fusion data from the guidance information fusion processing board; the simulation integrated control machine generates servo control instructions according to the fusion data, drives the simulation module in the client software to carry out the next round of data simulation and integration, and continues to integrate the new round of data. Packing and sending the guidance information fusion processing board, and so on, the closed-loop data simulation and transmission are carried out cyclically; wherein, in each round of simulation, the display module in the client software installed on the second simulation computer will display the aircraft and the aircraft in real time. The movement track of the target, and the received first measurement data, fusion data and self-simulated second measurement data will be saved, so as to provide quantitative test criteria for the test results of the information fusion algorithm in the future.
本发明实施例提供的制导信息融合算法的通用化半实物仿真验证系统的有益效果如下:The beneficial effects of the generalized hardware-in-the-loop simulation verification system of the guidance information fusion algorithm provided by the embodiment of the present invention are as follows:
(1)本发明实施例中,制导信息融合处理板中所处理的数据与第一仿真计算机、第二仿真计算机中原始仿真的数据进行了硬件隔离;并且,本发明实施例通过射频信号发射器和射频信号接收器对制导信息融合处理板待处理的数据在无线信道中进行了传输;综合以上两点,本发明实施例模拟了真实外场应用中数据的传输方式,从而可以对数据传输的速率和算法处理的实时性进行验证。并且,本发明实施例中第二仿真计算机与制导信息融合处理板通过以太网接口进行通信,传输速率较高,提高了测试效果的实时性。(1) In the embodiment of the present invention, the data processed in the guidance information fusion processing board is separated by hardware from the data originally simulated in the first simulation computer and the second simulation computer; and, in the embodiment of the present invention, a radio frequency signal transmitter is used and the radio frequency signal receiver to transmit the data to be processed by the guidance information fusion processing board in the wireless channel; combining the above two points, the embodiment of the present invention simulates the data transmission mode in the real field application, so that the rate of data transmission can be adjusted. And the real-time performance of the algorithm processing is verified. In addition, in the embodiment of the present invention, the second simulation computer communicates with the guidance information fusion processing board through the Ethernet interface, and the transmission rate is high, which improves the real-time performance of the test effect.
(2)本发明实施例使用第一仿真计算机仿真卫星量测数据、侦察机量测数据以及地面雷达情报网量测数据中的至少两种,通过仿真不同类型的第一量测数据,能够为空、天、地三种外场环境的任意组合下的外场环境提供原始数据,具有较高的通用性。并且,本发明实施例还使用第二仿真计算机对飞行器所在的弹载平台的各种传感器量测数据进行了仿真,可以进一步为空天地一体化架构下的信息融合算法验证提供数据支持,在增加了数据获取渠道的同时,也提高了测试系统的通用性;并且,本发明实施例可根据导引头搭载的传感器类型在第二仿真计算机中选择仿真一种或多种类型的传感器量测数据,即第二量测数据,进一步提高了测试系统的通用性。(2) The embodiment of the present invention uses the first simulation computer to simulate at least two of satellite measurement data, reconnaissance aircraft measurement data, and ground radar intelligence network measurement data. By simulating different types of first measurement data, it is possible to The external field environment under any combination of the three external field environments of air, sky and earth provides original data and has high versatility. In addition, the embodiment of the present invention also uses the second simulation computer to simulate the measurement data of various sensors of the missile-borne platform where the aircraft is located, which can further provide data support for the verification of the information fusion algorithm under the integrated air-space-ground architecture. Not only the data acquisition channel is improved, but also the versatility of the test system is improved; and, according to the embodiment of the present invention, one or more types of sensor measurement data can be selected and simulated in the second simulation computer according to the sensor type carried by the seeker. , that is, the second measurement data, which further improves the versatility of the test system.
(3)本发明实施例中,制导信息融合处理板作为通用的数据处理平台为制导信息融合算法的测试提供了硬件平台,适用于各种不同的制导信息融合算法,通用性较高,可以部分替代外场实验,从而节省外场实验的时间周期和成本。(3) In the embodiment of the present invention, the guidance information fusion processing board, as a general data processing platform, provides a hardware platform for the testing of guidance information fusion algorithms, is suitable for various guidance information fusion algorithms, has high versatility, and can be partially Substitute the field experiment, thereby saving the time period and cost of the field experiment.
在一种可选实现方式中,上述的第一通信接口和第二通信接口均为通用串行总线USB接口,以太网接口为千兆以太网接口。In an optional implementation manner, the above-mentioned first communication interface and the second communication interface are both Universal Serial Bus (USB) interfaces, and the Ethernet interface is a Gigabit Ethernet interface.
可以理解的是,USB接口和以太网接口是计算机的通用接口,采用千兆以太网接口实现第二仿真计算机和制导信息融合处理板的通信,可以提高两者的数据传输速率,提高系统的实时性。It can be understood that the USB interface and the Ethernet interface are common interfaces of the computer. The use of the Gigabit Ethernet interface to realize the communication between the second simulation computer and the guidance information fusion processing board can improve the data transmission rate of the two and improve the real-time performance of the system. sex.
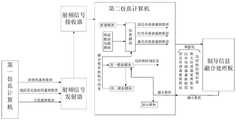
图6示例性的示出了本发明实施例提供的通用化半实物仿真验证系统中的数据流向。参见图6所示,第一仿真计算机模拟天基信息系统仿真卫星量测数据,模拟空基信息系统仿真侦察机量测数据,模拟地基信息系统仿真地面雷达情报网量测数据;第一仿真计算机将仿真的第一量测数据进行编码和调制后发送给射频信号发射器,射频信号发射器将第一量测数据发送给射频信号接收器,射频信号接收器通过USB接口将第一量测数据发送给第二仿真计算机,第二仿真计算机对收到的第一量测数据进行解调和解码,并仿真雷达传感器量测数据、红外传感器量测数据以及激光传感器量测数据,即仿真第二量测数据,以及模拟综控机生成综控机控制信息;然后,第二仿真计算机将第一量测数据、第二量测数据以及综控机控制信息根据以太网通信协议打包成数据包发给制导信息融合处理板;在制导信息融合处理板内部,以太网通信模块将数据包转换为普通的并行数据;当以太网通信模块被写满后便发出FULL信号给控制模块;控制模块检测到以太网通信模块的FULL信号后,启动数据接收,开始读取以太网通信模块里的数据并存储在自身的双口RAM中;这里,如果以太网通信模块的时钟和信息融合处理模块的时钟不同,可以采用双口RAM来解决这一问题;控制模块将数据包内的数据按内容不同存储在不同的双口RAM中;例如,有雷达传感器量测数据RAM、红外传感器量测数据RAM、激光传感器量测数据RAM、卫星量测数据、侦察机量测数据RAM、地面雷达情报网量测数据以及综控机控制信息。控制模块解包完毕后,根据各个传感器的数据率的定时信息触发数字信号处理模块的DSP中断,通知DSP来取数据;数字信号处理模块的DSP在中断服务子程序取得数据后便进行信息融合处理,将得到的融合数据通过总线直接写入到控制模块FPGA内对应的双口RAM里。当写入完毕后,数字信号处理模块的DSP采取向控制模块的FPGA的特定地址写入数据的方式,来告知控制模块融合数据己准备完毕,当控制模块的FPGA检测到这一消息后,首先检测以太网通信模块内接收融合数据的存储区是否为空,如果为空启动数据发送,非空则等待上一轮的融合数据被第二仿真计算机取走后再发送;以太网通信模块取回融合数据后,将并行的融合数据按照以太网通信协议进行转化后立即发送给第二仿真计算机;此时,如果第二仿真计算机刚好发来数据包,则以太网通信模块先将融合数据发送给第二仿真计算机,再接收来自第二仿真计算机的数据包。第二仿真计算机接收到来自以太网通信模块的融合数据后,模拟综控机生成伺服控制指令,并模拟导引头伺服系统执行伺服控制指令,以驱动各传感器的天线运动;如果未到达制导最小距离,则第二仿真计算机记录融合数据并基于融合数据通过显示模块来显示飞行器和目标的飞行轨迹,从而将跟踪效果更直观的表示出来,至此完成了数据处理的一次大回路过程;然后,第二仿真计算机继续仿真新的第一量测数据、第二仿真计算机根据上一轮融合数据的执行结果继续仿真新的第二量测数据,并模拟综控机生成新的综控机控制信息,继续新一轮的大回路过程。FIG. 6 exemplarily shows the data flow in the generalized hardware-in-the-loop simulation verification system provided by the embodiment of the present invention. Referring to Figure 6, the first simulation computer simulates the space-based information system to simulate the satellite measurement data, the space-based information system simulates the reconnaissance aircraft measurement data, and the ground-based information system simulates the ground radar information network measurement data; the first simulation computer The simulated first measurement data is encoded and modulated and sent to the radio frequency signal transmitter, the radio frequency signal transmitter sends the first measurement data to the radio frequency signal receiver, and the radio frequency signal receiver transmits the first measurement data through the USB interface Send to the second simulation computer, the second simulation computer demodulates and decodes the received first measurement data, and simulates the radar sensor measurement data, the infrared sensor measurement data and the laser sensor measurement data, that is, simulates the second measurement data. The measurement data, and the simulated integrated control machine to generate the integrated control machine control information; then, the second simulation computer packages the first measurement data, the second measurement data, and the integrated control machine control information into data packets according to the Ethernet communication protocol. To the guidance information fusion processing board; inside the guidance information fusion processing board, the Ethernet communication module converts the data packets into ordinary parallel data; when the Ethernet communication module is full, it sends a FULL signal to the control module; the control module detects that After the FULL signal of the Ethernet communication module, start data reception, start reading the data in the Ethernet communication module and store it in its own dual-port RAM; here, if the clock of the Ethernet communication module and the clock of the information fusion processing module are different , you can use dual-port RAM to solve this problem; the control module stores the data in the data packets in different dual-port RAMs according to different contents; for example, there are radar sensor measurement data RAM, infrared sensor measurement data RAM, laser Sensor measurement data RAM, satellite measurement data, reconnaissance aircraft measurement data RAM, ground radar intelligence network measurement data and integrated control machine control information. After the control module is unpacked, it triggers the DSP interrupt of the digital signal processing module according to the timing information of the data rate of each sensor, and informs the DSP to fetch the data; the DSP of the digital signal processing module performs information fusion processing after the interrupt service subroutine obtains the data. , and directly write the obtained fusion data into the corresponding dual-port RAM in the control module FPGA through the bus. After the writing is completed, the DSP of the digital signal processing module adopts the method of writing data to the specific address of the FPGA of the control module to inform the control module that the fusion data is ready. When the FPGA of the control module detects this message, first Detect whether the storage area receiving the fusion data in the Ethernet communication module is empty, if it is empty, start the data transmission, if it is not empty, wait for the fusion data of the previous round to be taken away by the second simulation computer before sending; the Ethernet communication module retrieves it After the fusion data, the parallel fusion data is converted according to the Ethernet communication protocol and sent to the second simulation computer immediately; at this time, if the second simulation computer just sends a data packet, the Ethernet communication module first sends the fusion data to the second simulation computer. The second simulation computer receives the data packet from the second simulation computer. After the second simulation computer receives the fusion data from the Ethernet communication module, the simulation integrated control machine generates servo control instructions, and simulates the seeker servo system to execute the servo control instructions to drive the antenna movement of each sensor; if the guidance minimum is not reached distance, the second simulation computer records the fusion data and displays the flight trajectories of the aircraft and the target through the display module based on the fusion data, so as to show the tracking effect more intuitively, thus completing a large loop process of data processing; then, the third The second simulation computer continues to simulate the new first measurement data, the second simulation computer continues to simulate the new second measurement data according to the execution result of the last round of fusion data, and simulates the integrated control machine to generate new integrated control machine control information, Continue a new round of the big loop process.
另外,参见图7所示,飞行器中的每个实体的传感器自身都有自身的伺服小回路,并且都受到制导信息融合处理板的控制。具体到本发明实施例中而言,制导信息融合处理板将融合数据发送至第二仿真计算机,第二仿真计算机形成伺服控制指令去控制飞行器的执行机构例如发动机等改变飞行方向,飞行器和目标之间发生相对运动又改变了目标在传感器中量测的方位和距离,形成新的传感器量测数据,新的传感器量测数据在经过制导信息融合处理板的融合处理后又将形成新的伺服控制指令,使传感器的光轴在跟踪阶段始终指向目标,第二仿真计算机又会根据新的融合数据在大回路去改变导弹的飞行,在导弹飞行大回路和传感器的伺服小回路的控制下,飞行器实现精确地跟踪或命中目标。In addition, as shown in FIG. 7 , the sensor of each entity in the aircraft has its own small servo loop, and is controlled by the guidance information fusion processing board. Specifically in the embodiment of the present invention, the guidance information fusion processing board sends the fusion data to the second simulation computer, and the second simulation computer forms servo control instructions to control the execution mechanism of the aircraft, such as the engine, to change the flight direction, and the difference between the aircraft and the target is The relative movement between them changes the azimuth and distance of the target measured in the sensor, and forms new sensor measurement data. The new sensor measurement data will form a new servo control after being fused by the guidance information fusion processing board. command, so that the optical axis of the sensor always points to the target in the tracking stage, and the second simulation computer will change the flight of the missile in the large loop according to the new fusion data. Under the control of the large flight loop of the missile and the small servo loop of the sensor, the aircraft To achieve precise tracking or hit the target.
下面,对本发明实施例中第二仿真计算机与制导信息融合处理板之间传输的数据的具体内容和格式进行举例说明。第二仿真计算机和制导信息融合处理板通过以太网接口进行通信,通信协议为UDP协议,数据格式为八位无符号数,如果数据大于八位,则用两个字节的数据来表示,低八位在前,高八位在后。假设待验证的制导信息融合算法中,待被融合的第二量测数据包含雷达传感器量测数据和红外传感器量测数据两种。Hereinafter, the specific content and format of the data transmitted between the second simulation computer and the guidance information fusion processing board in the embodiment of the present invention will be illustrated by way of example. The second simulation computer communicates with the guidance information fusion processing board through the Ethernet interface. The communication protocol is the UDP protocol, and the data format is an eight-bit unsigned number. If the data is larger than eight bits, it is represented by two bytes of data. The eight are first, and the upper eight are last. It is assumed that in the guidance information fusion algorithm to be verified, the second measurement data to be fused includes radar sensor measurement data and infrared sensor measurement data.
第二仿真计算机发向制导信息融合处理板的数据包的内容和格式可以参见表1所示:The content and format of the data packet sent by the second simulation computer to the guidance information fusion processing board can be seen in Table 1:
表1Table 1
其中,由于不同传感器的数据率不同,故而当某一时刻没有某种传感器的量测数据时,可以将数据包中该传感器的数据全部置零处理。Among them, since the data rates of different sensors are different, when there is no measurement data of a certain sensor at a certain moment, all the data of the sensor in the data packet can be set to zero for processing.
表1中,综控机数据的内容和格式可以参见表2所示:In Table 1, the content and format of the comprehensive control machine data can be seen in Table 2:
表2Table 2
其中,综控机控制信息的每一位表示的含义如表3所示,数据位高电平有效,即数据位置“1”时为有效数据。例如,当D15的数据位被置“1”时,表示综控机发出了测试复位的控制指令。Among them, the meaning represented by each bit of the control information of the integrated control machine is shown in Table 3, and the data bit is active at a high level, that is, when the data bit is "1", it is valid data. For example, when the data bit of D15 is set to "1", it means that the integrated control machine has issued a control command for test reset.
表3table 3

雷达传感器量测数据的内容和格式参见表4所示:The content and format of radar sensor measurement data are shown in Table 4:
表4Table 4
可以看到,雷达传感器量测数据包含了雷达探测到的目标数目以及每个目标的测量数据,并包含了雷达天线的伺服状态信息,该伺服状态信息包括雷达的天线指向信息等。It can be seen that the radar sensor measurement data includes the number of targets detected by the radar and the measurement data of each target, and includes the servo state information of the radar antenna, which includes the radar antenna pointing information and so on.
红外传感器量测数据是指红外传感器探测到的图像信号进行图像预处理之后得到关于目标的属性值,如像素数、圆形度、均值对比度和复杂度等等;红外传感器量测数据的内容和格式参见表5所示。The infrared sensor measurement data refers to the image signal detected by the infrared sensor to obtain the attribute values of the target after image preprocessing, such as the number of pixels, circularity, average contrast and complexity, etc.; the content of the infrared sensor measurement data and The format is shown in Table 5.
表5table 5
此外,红外传感器还可以通过工作状态的控制字信息来告知制导信息融合处理板自身的状态信息,该控制字信息可以参见表6所示:In addition, the infrared sensor can also inform the state information of the guidance information fusion processing board itself through the control word information of the working state. The control word information can be seen in Table 6:
表6Table 6


表6中示出的各个数据位为高电平有效。The individual data bits shown in Table 6 are active high.
制导信息融合处理板发送至第二仿真计算机的融合数据的内容和格式可以参见表7所示:The content and format of the fusion data sent by the guidance information fusion processing board to the second simulation computer can be seen in Table 7:
表7Table 7
表7中,第一项工作信息可以参见表8所示:In Table 7, the first job information can be found in Table 8:
表8Table 8

卫星量测数据的内容和格式可以参见表9所示:The content and format of satellite measurement data can be seen in Table 9:
表9Table 9
侦察机量测数据的内容和格式可以参见表10所示:The content and format of the reconnaissance aircraft measurement data can be seen in Table 10:
表10Table 10
地面雷达情报网量测数据的内容和格式可以参见表11所示:The content and format of the measurement data of the ground radar intelligence network can be seen in Table 11:
表11Table 11
上述表格中,有些设置了冗余的数据位,是为了便于后续增添新的内容。需要说明的是,上述示出的数据内容及格式仅仅作为示例,并不构成对本发明实施例的限定,在实际应用中可根据导引头搭载的传感器种类适应定义数据的格式及内容。In the above table, some redundant data bits are set to facilitate the subsequent addition of new content. It should be noted that the data content and format shown above are only examples and do not constitute a limitation to the embodiments of the present invention. In practical applications, the format and content of the data can be defined according to the types of sensors mounted on the seeker.
需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。It should be noted that the terms "first" and "second" are only used for description purposes, and cannot be understood as indicating or implying relative importance or implying the number of indicated technical features. Thus, a feature defined as "first", "second" may expressly or implicitly include one or more features. In the description of the present invention, "plurality" means two or more, unless otherwise expressly and specifically defined.
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。In the description of this specification, description with reference to the terms "one embodiment," "some embodiments," "example," "specific example," or "some examples", etc., mean specific features described in connection with the embodiment or example Or features are included in at least one embodiment or example of the invention. In this specification, schematic representations of the above terms are not necessarily directed to the same embodiment or example. Furthermore, the particular features or characteristics described may be combined in any suitable manner in any one or more embodiments or examples. Furthermore, those skilled in the art may combine and combine the different embodiments or examples described in this specification.
尽管在此结合各实施例对本申请进行了描述,然而,在实施所要求保护的本申请过程中,本领域技术人员通过查看所述附图、公开内容、以及所附权利要求书,可理解并实现所述公开实施例的其他变化。Although the application is described herein in conjunction with the various embodiments, those skilled in the art will understand and understand from a review of the drawings, the disclosure, and the appended claims in practicing the claimed application. Other variations of the disclosed embodiments are implemented.
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。The above content is a further detailed description of the present invention in conjunction with specific preferred embodiments, and it cannot be considered that the specific implementation of the present invention is limited to these descriptions. For those of ordinary skill in the technical field of the present invention, without departing from the concept of the present invention, some simple deductions or substitutions can be made, which should be regarded as belonging to the protection scope of the present invention.
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110230315.5ACN113110098B (en) | 2021-03-02 | 2021-03-02 | Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithm |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110230315.5ACN113110098B (en) | 2021-03-02 | 2021-03-02 | Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithm |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113110098A CN113110098A (en) | 2021-07-13 |
| CN113110098Btrue CN113110098B (en) | 2022-06-10 |
Family
ID=76709674
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110230315.5AActiveCN113110098B (en) | 2021-03-02 | 2021-03-02 | Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithm |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113110098B (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102540902A (en)* | 2011-12-27 | 2012-07-04 | 西安电子科技大学 | Single-platform multi-sensor information integration processor and experimental system |
| US9280038B1 (en)* | 2014-04-28 | 2016-03-08 | SZ DJI Technology Co., Ltd. | Interchangeable mounting platform |
| CN108761499A (en)* | 2017-12-27 | 2018-11-06 | 北京时代民芯科技有限公司 | A kind of test system and method for the spaceborne GNSS receiver operation on orbit of simulation |
| CN111413888A (en)* | 2020-03-25 | 2020-07-14 | 北京仿真中心 | Semi-physical simulation method and system |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109634139B (en)* | 2018-12-10 | 2021-12-07 | 中国航天空气动力技术研究院 | Semi-physical simulation system and method for navigation and control system of hypersonic aircraft |
- 2021
- 2021-03-02CNCN202110230315.5Apatent/CN113110098B/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102540902A (en)* | 2011-12-27 | 2012-07-04 | 西安电子科技大学 | Single-platform multi-sensor information integration processor and experimental system |
| US9280038B1 (en)* | 2014-04-28 | 2016-03-08 | SZ DJI Technology Co., Ltd. | Interchangeable mounting platform |
| CN108761499A (en)* | 2017-12-27 | 2018-11-06 | 北京时代民芯科技有限公司 | A kind of test system and method for the spaceborne GNSS receiver operation on orbit of simulation |
| CN111413888A (en)* | 2020-03-25 | 2020-07-14 | 北京仿真中心 | Semi-physical simulation method and system |
Non-Patent Citations (3)
| Title |
|---|
| 基于GPS射频模拟信号源的无人机导航系统研究;许宗飞等;《计算机测量与控制》;20100325(第03期);全文* |
| 寻的制导导弹半实物仿真中的自动化综合测试;王东木;《系统仿真学报》;19970820(第03期);全文* |
| 雷达/红外复合制导并行仿真时空一致性研究;赵世明等;《激光与红外》;20151020(第10期);全文* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113110098A (en) | 2021-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109596118B (en) | A method and device for obtaining spatial position information of a target object | |
| US20230394756A1 (en) | Three-dimensional reconstruction method, three-dimensional reconstruction apparatus and storage medium | |
| CN103246204B (en) | Multiple no-manned plane system emulation and verification method and device | |
| CN105955302A (en) | Multi-rotor unmanned aerial vehicle environment autonomous monitoring control system and method | |
| CN106444423A (en) | Indoor multi unmanned aerial vehicle formation flight simulation verification platform and achieving method thereof | |
| CN102540902A (en) | Single-platform multi-sensor information integration processor and experimental system | |
| CN108549098A (en) | A kind of patrol unmanned machine localization method of indoor substation | |
| CN103148850B (en) | High-precision star sensor | |
| CN104932535B (en) | Utilize method of the analogue system to Air-borne Forward-looking Infra-Red Search Set closed loop test | |
| CN112435454A (en) | Unmanned aerial vehicle system, unmanned aerial vehicle control method, device, equipment and medium | |
| CN108965124A (en) | A kind of unmanned aerial vehicle control system | |
| CN106527461A (en) | Flight control system based on dual-core processor | |
| CN107045136A (en) | Configurable inertia/many integrated navigation systems of astronomy/Big Dipper and its air navigation aid | |
| US20210240185A1 (en) | Shooting control method and unmanned aerial vehicle | |
| JP2024009938A (en) | Flight management server and flight management system for unmanned aerial vehicles | |
| CN101413801B (en) | Unmanned machine real time target information solving machine and solving method thereof | |
| CN113110098B (en) | Generalized hardware-in-the-loop simulation verification system for guidance information fusion algorithm | |
| CN114740760A (en) | Hardware-in-the-loop simulation method and system for strapdown guided missile | |
| CN104950688A (en) | Distributed transfer alignment semi-physical simulation system and method thereof | |
| CN110764525A (en) | UAV flight control system based on Tiantong-1 | |
| CN112837378B (en) | Aerial camera attitude external dynamic calibration and mapping method based on multi-unmanned aerial vehicle formation | |
| CN116266061A (en) | An RTX-based intelligent ammunition cooperative combat system evaluation simulation platform | |
| CN117742225B (en) | A two-way communication control system for ground-to-air radio stations | |
| CN116228598B (en) | A geometric distortion correction device and application for remote sensing images of UAVs in mountainous areas | |
| Szolc et al. | Hardware-in-the-loop simulation of a UAV autonomous landing algorithm implemented in SoC FPGA |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |