CN113076443A - Positioning method, positioning device, electronic equipment and storage medium - Google Patents
Positioning method, positioning device, electronic equipment and storage mediumDownload PDFInfo
- Publication number
- CN113076443A CN113076443ACN202110245990.5ACN202110245990ACN113076443ACN 113076443 ACN113076443 ACN 113076443ACN 202110245990 ACN202110245990 ACN 202110245990ACN 113076443 ACN113076443 ACN 113076443A
- Authority
- CN
- China
- Prior art keywords
- image
- position information
- information
- positioning
- electronic device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/587—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using geographical or spatial information, e.g. location
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/757—Matching configurations of points or features
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/024—Guidance services
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/33—Services specially adapted for particular environments, situations or purposes for indoor environments, e.g. buildings
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Databases & Information Systems (AREA)
- Signal Processing (AREA)
- Library & Information Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Evolutionary Computation (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Navigation (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请涉及定位技术,尤其涉及一种定位方法、装置、电子设备及存储介质。The present application relates to positioning technology, and in particular, to a positioning method, apparatus, electronic device and storage medium.
背景技术Background technique
目前的GPS全球定位技术已经应用在各种导航产品上,使用户能够根据输入的目的地名称或定位标识来查询周边信息。为用户的出行提供了极大便利,同时也可以让用户足不出户了解到目的地的相关状况。The current GPS global positioning technology has been applied to various navigation products, enabling users to query surrounding information according to the input destination name or positioning identifier. It provides great convenience for users to travel, and also allows users to understand the relevant conditions of the destination without leaving home.
现有的导航及查询都是基于已知目的地的有效信息进行导航和查询的,然而对于未知的目的地现有技术则无法提供任何导航和查询服务。特别是当用户来到一个陌生地区时,现有的导航产品无法提供有效的查询服务,导航功能有待完善。The existing navigation and inquiry are based on the effective information of the known destination. However, the existing technology cannot provide any navigation and inquiry service for the unknown destination. Especially when users come to an unfamiliar area, the existing navigation products cannot provide effective query services, and the navigation function needs to be improved.
发明内容SUMMARY OF THE INVENTION
为解决上述技术问题,本申请实施例期望提供一种定位方法、装置、电子设备及存储介质。In order to solve the above technical problems, the embodiments of the present application expect to provide a positioning method, an apparatus, an electronic device, and a storage medium.
本申请的技术方案是这样实现的:The technical solution of the present application is realized as follows:
第一方面,提供了一种定位方法,应用于电子设备,所述方法包括:In a first aspect, a positioning method is provided, applied to an electronic device, and the method includes:
获取包含未知目的地特征的第一图像并显示;Obtain and display the first image containing the characteristics of the unknown destination;
控制定位模块采集所述电子设备的位置信息;controlling the positioning module to collect the position information of the electronic device;
从图像数据库中确定所述位置信息对应的图像集合;其中,所述图像数据库中的每张图像对应有位置信息;Determine an image set corresponding to the location information from an image database; wherein, each image in the image database corresponds to location information;
将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;Perform image feature matching between the first image and the second image in the image set, and determine the target second image that satisfies the matching condition;
确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息,并显示。The location information of the unknown destination is determined as the location information corresponding to the second image of the target, and displayed.
第二方面,提供了一种定位装置,应用于电子设备,所述装置包括:In a second aspect, a positioning device is provided, which is applied to electronic equipment, and the device includes:
获取模块,用于获取包含未知目的地特征的第一图像并显示;an acquisition module for acquiring and displaying the first image containing the unknown destination feature;
定位模块,用于采集所述电子设备的位置信息;a positioning module for collecting the position information of the electronic device;
处理模块,用于从图像数据库中确定所述位置信息对应的图像集合;其中,所述图像数据库中的每张图像对应有位置信息;a processing module, configured to determine an image set corresponding to the position information from an image database; wherein, each image in the image database corresponds to position information;
所述处理模块,还用于将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息;The processing module is further configured to perform image feature matching between the first image and the second image in the image set, and determine the target second image that satisfies the matching condition; determine that the location information of the unknown destination is the the position information corresponding to the second image of the target;
显示模块,用于显示所述未知目的地的位置信息。A display module, configured to display the location information of the unknown destination.
第三方面,提供了一种电子设备,包括:处理器和配置为存储能够在处理器上运行的计算机程序的存储器,In a third aspect, there is provided an electronic device comprising: a processor and a memory configured to store a computer program executable on the processor,
其中,所述处理器配置为运行所述计算机程序时,执行前述方法的步骤。Wherein, the processor is configured to execute the steps of the aforementioned method when running the computer program.
第四方面,提供了一种计算机存储介质,其上存储有计算机程序,其中,该计算机程序被处理器执行时实现前述方法的步骤。In a fourth aspect, a computer storage medium is provided on which a computer program is stored, wherein the computer program implements the steps of the aforementioned method when executed by a processor.
本申请实施例中提供了一种定位方法、装置、电子设备及存储介质,该方法应用于电子设备,包括:获取包含未知目的地特征的第一图像并显示;控制定位模块采集所述电子设备的位置信息;从图像数据库中确定所述位置信息对应的图像集合;其中,所述图像数据库中的每张图像对应有位置信息;将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息,并显示。如此,通过对未知目的地的标志性物体进行拍摄得到第一图像,并根据电子设备的位置信息从图像数据库筛选出图像集合,进一步将第一图像与图像集合中的第二图像进行图像特征匹配,来实现对未知目的地的识别,丰富了导航产品的定位功能。Embodiments of the present application provide a positioning method, device, electronic device, and storage medium. The method is applied to electronic devices, including: acquiring and displaying a first image containing unknown destination features; controlling a positioning module to collect the electronic device location information; determine the image set corresponding to the location information from the image database; wherein, each image in the image database corresponds to location information; compare the first image with the second image in the image set Perform image feature matching to determine a target second image that satisfies the matching conditions; determine the location information of the unknown destination as the location information corresponding to the target second image, and display it. In this way, a first image is obtained by photographing an iconic object of an unknown destination, and an image set is filtered from the image database according to the position information of the electronic device, and the image feature matching is further performed between the first image and the second image in the image set. , to realize the identification of unknown destinations and enrich the positioning function of navigation products.
附图说明Description of drawings
图1为本申请实施例中定位方法的第一流程示意图;FIG. 1 is a first schematic flowchart of a positioning method in an embodiment of the present application;
图2为本申请实施例中定位方法的第二流程示意图;FIG. 2 is a second schematic flowchart of the positioning method in the embodiment of the present application;
图3为本申请实施例室内定位示意图;3 is a schematic diagram of indoor positioning according to an embodiment of the present application;
图4为本申请实施例中搜索范围的第一示意图;4 is a first schematic diagram of a search range in an embodiment of the present application;
图5为本申请实施例中搜索范围的第二示意图;5 is a second schematic diagram of a search range in an embodiment of the present application;
图6为本申请实施例中定位方法的第三流程示意图FIG. 6 is a third schematic flowchart of the positioning method in the embodiment of the present application
图7为本申请实施例中定位装置的组成结构示意图;FIG. 7 is a schematic diagram of the composition and structure of a positioning device in an embodiment of the present application;
图8为本申请实施例中电子设备的组成结构示意图。FIG. 8 is a schematic structural diagram of an electronic device in an embodiment of the present application.
具体实施方式Detailed ways
为了能够更加详尽地了解本申请实施例的特点与技术内容,下面结合附图对本申请实施例的实现进行详细阐述,所附附图仅供参考说明之用,并非用来限定本申请实施例。In order to have a more detailed understanding of the features and technical contents of the embodiments of the present application, the implementation of the embodiments of the present application will be described in detail below with reference to the accompanying drawings.
图1为本申请实施例中定位方法的第一流程示意图,如图1所示,该方法具体可以包括:FIG. 1 is a first schematic flowchart of a positioning method in an embodiment of the present application. As shown in FIG. 1 , the method may specifically include:
步骤101:获取包含未知目的地特征的第一图像并显示;Step 101: Acquire and display a first image containing unknown destination features;
这里,通过对第一图像与图像数据库中的第二图像进行特征匹配,可以识别出未知目的地具体的位置信息。图像数据库中包含使用高精度的航空摄影采集的图像。Here, by performing feature matching between the first image and the second image in the image database, the specific location information of the unknown destination can be identified. The image database contains images captured using high-precision aerial photography.
在一些实施例中,所述获取包含未知目的地特征的第一图像,包括:控制图像采集模块采集所述第一图像;或者,获取其他电子设备发送的所述第一图像。In some embodiments, the acquiring the first image including the features of the unknown destination includes: controlling an image acquisition module to acquire the first image; or acquiring the first image sent by other electronic devices.
也就是说,可以通过电子设备自身的图像采集模块采集所在位置周围包含标志性地标的图像,比如包含景点名称、街道名称、特征景色的图像。或者,获取其他电子设备发送第一图像,其他电子设备控制图像采集模块采集所在位置周围包含标志性地标的图像。That is to say, an image including landmarks around the location, such as an image including the name of a scenic spot, a street name, and a characteristic scenery, can be collected by the image collection module of the electronic device itself. Alternatively, other electronic devices are acquired to send the first image, and the other electronic devices control the image acquisition module to collect images including landmark landmarks around the location.
步骤102:控制定位模块采集所述电子设备的位置信息;Step 102: control the positioning module to collect the position information of the electronic device;
具体地,定位模块包括以下至少一种或多种:UWB定位模块、移动通信模块、GPS定位模块等。这里,UWB定位模块常用于室内定位,相比于其他两个定位模块,具有较高的室内定位精度,移动通信模块可以为4G通信模块、5G通信模块、6G通信模块等,通过与无线移动通信基站的通信来确定电子设备的位置信息,移动通信模块的定位精度高于GPS定位模块。Specifically, the positioning module includes at least one or more of the following: a UWB positioning module, a mobile communication module, a GPS positioning module, and the like. Here, the UWB positioning module is often used for indoor positioning. Compared with the other two positioning modules, it has higher indoor positioning accuracy. The mobile communication module can be a 4G communication module, a 5G communication module, a 6G communication module, etc. The position information of the electronic equipment is determined by the communication of the base station, and the positioning accuracy of the mobile communication module is higher than that of the GPS positioning module.
这里,位置信息是指电子设备当前所处的位置,位置信息包括地理位置信息,地理位置信息具体包括经纬度信息,但实际应用中经纬度信息常用国家、省市、区县、街道等代替向显示给用户。Here, the location information refers to the current location of the electronic device, the location information includes geographic location information, and the geographic location information specifically includes latitude and longitude information. user.
步骤103:从图像数据库中确定所述位置信息对应的图像集合;其中,所述图像数据库中的每张图像对应有位置信息;Step 103: Determine the image set corresponding to the location information from the image database; wherein, each image in the image database corresponds to location information;
具体地,根据所述位置信息和预设距离,确定搜索范围;从所述图像数据库确定位于搜索范围内的图像,组成图像集合。Specifically, the search range is determined according to the position information and the preset distance; the images located in the search range are determined from the image database to form an image set.
也就是说,可以以电子设备所处位置为圆心,以预设距离为半径画园,确定搜索范围。这里,当预设距离包含一个距离值时,搜索范围为一个圆形,当预设距离包含两个距离值时,搜索范围为一个圆环。That is to say, a circle can be drawn with the position of the electronic device as the center and the preset distance as the radius to determine the search range. Here, when the preset distance includes one distance value, the search range is a circle, and when the preset distance includes two distance values, the search range is a circle.
预设距离可以为预先设置的默认扫描距离,或者根据第一图像估计未知目的地与电子设备之间的距离。The preset distance may be a preset default scanning distance, or an estimated distance between the unknown destination and the electronic device according to the first image.
示例性的,所述方法还包括:根据所述第一图像的深度信息,确定所述预设距离。Exemplarily, the method further includes: determining the preset distance according to the depth information of the first image.
步骤104:将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;Step 104: Perform image feature matching between the first image and the second image in the image set, and determine the target second image that satisfies the matching condition;
具体地,采用图像特征提取算法对第一图像和第二图像进行特征提取,将第一图像中的特征信息与第二图像中的特征信息进行比较,得到相似度最高的一张或多张第二图像。示例性的,匹配条件可以为相同特征数量大于预设数量,或者,相同特征数量最多。Specifically, an image feature extraction algorithm is used to perform feature extraction on the first image and the second image, and the feature information in the first image is compared with the feature information in the second image, and one or more images with the highest similarity are obtained. Second image. Exemplarily, the matching condition may be that the number of the same features is greater than the preset number, or the number of the same features is the largest.
步骤105:确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息,并显示。Step 105: Determine and display the location information of the unknown destination as the location information corresponding to the second image of the target.
实际应用中,未知目的地可以为电子设备周围一定范围内的地方,使用户可以通过图像采集模块采集到包含未知目的地特征的第一图像,或者,周围其他用于使用其他电子设备拍摄的第一图像,并发送给该电子设备。In practical applications, the unknown destination can be a place within a certain range around the electronic device, so that the user can collect the first image containing the characteristics of the unknown destination through the image acquisition module, or other surrounding images used for shooting with other electronic devices. an image and send it to the electronic device.
示例性的,用户站在室内窗户边对窗外的未知景点、街道或建筑物进行拍摄,采用本申请实施例这种定位方法对未知目的地进行识别,确定未知目的地的位置信息。Exemplarily, a user stands by an indoor window to photograph an unknown scenic spot, street or building outside the window, uses the positioning method of the embodiment of the present application to identify the unknown destination, and determines the location information of the unknown destination.
在一些实施例中,所述方法还包括:根据所述电子设备的位置信息和所述未知目的地的位置信息,生成导航信息;控制信息输出单元输出所述导航信息;或者,根据所述未知目的地的位置信息,查询所述未知目的地的周边信息。In some embodiments, the method further includes: generating navigation information according to the position information of the electronic device and the position information of the unknown destination; controlling the information output unit to output the navigation information; or, according to the unknown destination The location information of the destination, and query the surrounding information of the unknown destination.
也就是说,在确定未知目的地的位置信息之后,还可以利用电子设备的导航功能获取到达此处的导航信息并显示给用户。或者,利用电子设备的查询功能查询此处的周边信息并显示给用户,比如,美食、景点、酒店、停车场等信息。That is to say, after the location information of the unknown destination is determined, the navigation function of the electronic device can also be used to obtain the navigation information to reach the destination and display it to the user. Or, use the query function of the electronic device to query the surrounding information here and display it to the user, such as food, scenic spots, hotels, parking lots and other information.
这里,步骤101至步骤105的执行主体可以为电子设备的处理器。Here, the execution subject of
本申请中描述的电子设备可以包括诸如手机、平板电脑、笔记本电脑、掌上电脑、个人数字助理(Personal Digital Assistant,PDA)、便捷式媒体播放器(Portable MediaPlayer,PMP)、导航装置、可穿戴设备、智能手环、相机等。Electronic devices described in this application may include, for example, cell phones, tablet computers, notebook computers, palmtop computers, personal digital assistants (PDAs), portable media players (PMPs), navigation devices, wearable devices , smart bracelets, cameras, etc.
采用上述技术方案,通过对未知目的地的标志性物体进行拍摄得到第一图像,并根据电子设备的位置信息从图像数据库筛选出图像集合,进一步将第一图像与图像集合中的第二图像进行图像特征匹配,来实现对未知目的地的识别,丰富了导航产品的定位功能。Using the above technical solution, a first image is obtained by photographing an iconic object of an unknown destination, and an image set is selected from the image database according to the position information of the electronic device, and the first image is further compared with the second image in the image set. Image feature matching is used to identify unknown destinations and enrich the positioning function of navigation products.
为了能更加体现本申请的目的,在本申请上述实施例的基础上,进行进一步的举例说明,如图2所示,该方法具体包括:In order to better reflect the purpose of the present application, on the basis of the above-mentioned embodiments of the present application, further examples are given. As shown in FIG. 2 , the method specifically includes:
步骤201:获取包含未知目的地特征的第一图像并显示;Step 201: acquiring and displaying a first image containing unknown destination features;
这里,通过对第一图像与图像数据库中的第二图像进行特征匹配,可以识别出未知目的地具体的位置信息。图像数据库中包含使用高精度的航空摄影采集的图像。Here, by performing feature matching between the first image and the second image in the image database, the specific location information of the unknown destination can be identified. The image database contains images captured using high-precision aerial photography.
在一些实施例中,所述获取包含未知目的地特征的第一图像,包括:控制图像采集模块采集所述第一图像;或者,获取其他电子设备发送的所述第一图像。In some embodiments, the acquiring the first image including the features of the unknown destination includes: controlling an image acquisition module to acquire the first image; or acquiring the first image sent by other electronic devices.
也就是说,可以通过电子设备自身的图像采集模块采集所在位置周围包含标志性地标的图像,比如包含景点名称、街道名称、特征景色的图像。或者,获取其他电子设备发送第一图像,其他电子设备控制图像采集模块采集所在位置周围包含标志性地标的图像。That is to say, an image including landmarks around the location, such as an image including the name of a scenic spot, a street name, and a characteristic scenery, can be collected by the image collection module of the electronic device itself. Alternatively, other electronic devices are acquired to send the first image, and the other electronic devices control the image acquisition module to collect images including landmark landmarks around the location.
步骤202:控制定位模块采集所述电子设备的位置信息;其中,所述位置信息包括地理位置信息和角度信息;Step 202: Control the positioning module to collect the position information of the electronic device; wherein, the position information includes geographic position information and angle information;
这里,地理位置信息用于指示电子设备所在位置,作为搜索中心,角度信息用于指示电子设备的朝向角度,作为搜索角度。相较于单独利用地理位置信息确定搜索范围,地理位置信息结合角度信息能够进一步缩小图像数据库的筛选范围,减小定位延时。Here, the geographic location information is used to indicate the location of the electronic device as the search center, and the angle information is used to indicate the orientation angle of the electronic device as the search angle. Compared with using the geographic location information alone to determine the search range, combining the geographic location information with the angle information can further narrow the screening range of the image database and reduce the positioning delay.
在一些实施例中,所述控制定位模块采集所述电子设备的位置信息,包括:控制超带宽UWB定位模块与UWB基站进行通信,获取所述电子设备的角度信息;或者,控制移动通信模块与移动通信基站进行通信,获取所述电子设备的角度信息;或者,控制全球定位系统GPS定位模块与GPS卫星进行通信,获取所述电子设备的角度信息。In some embodiments, the controlling the positioning module to collect the position information of the electronic device includes: controlling the ultra-bandwidth UWB positioning module to communicate with the UWB base station to obtain the angle information of the electronic device; or, controlling the mobile communication module to communicate with the UWB base station. The mobile communication base station communicates to obtain the angle information of the electronic device; or controls the GPS positioning module of the global positioning system to communicate with GPS satellites to obtain the angle information of the electronic device.
也就是说,可以通过UWB定位模块、移动通信模块或GPS定位模块来获取角度信息。这里,UWB定位模块常用于室内定位,相比于其他两个定位模块,具有较高的室内定位精度,移动通信模块可以为4G通信模块、5G通信模块、6G通信模块等,通过与无线移动通信基站的通信来确定电子设备的角度信息,移动通信模块的定位精度高于GPS定位模块。That is, the angle information can be acquired through the UWB positioning module, the mobile communication module or the GPS positioning module. Here, the UWB positioning module is often used for indoor positioning. Compared with the other two positioning modules, it has higher indoor positioning accuracy. The mobile communication module can be a 4G communication module, a 5G communication module, a 6G communication module, etc. The communication of the base station is used to determine the angle information of the electronic equipment, and the positioning accuracy of the mobile communication module is higher than that of the GPS positioning module.
需要说明的是,在通过UWB定位模块获取角度信息时,室内每个楼层甚至每个房间均安装有UWB基站,UWB定位模块基于飞行时间(Time of flight,TOF)技术测量UWB定位模块和UWB基站之间的距离信息,基于到达相位差(Phase difference of arrival,PDOA)技术测量UWB定位模块和UWB基站之间的角度信息。It should be noted that when the angle information is obtained through the UWB positioning module, a UWB base station is installed on each floor or even in each room. The UWB positioning module measures the UWB positioning module and the UWB base station based on the Time of Flight (TOF) technology. The distance information between them is measured based on the phase difference of arrival (PDOA) technology to measure the angle information between the UWB positioning module and the UWB base station.
在一些实施例中,所述控制定位模块采集所述电子设备的位置信息,包括:控制5G定位模块与5G基站进行通信,和/或控制GPS定位模块与GPS卫星进行通信,获取所述电子设备的第一地理位置信息。这里,第一地理位置信息即为电子设备的地理位置信息。In some embodiments, the controlling the positioning module to collect the location information of the electronic device includes: controlling the 5G positioning module to communicate with a 5G base station, and/or controlling the GPS positioning module to communicate with GPS satellites, and obtaining the electronic device 's first geographic location information. Here, the first geographic location information is the geographic location information of the electronic device.
也就是说,可以通过移动通信模块或GPS定位模块来获取第一地理位置信息,由于移动通信模块的定位精度高于GPS定位模块,因此在移动通信覆盖范围内优先使用移动通信模块进行定位,在移动通信信号较差或者移动通信覆盖范围外使用GPS通信模块进行定位。That is to say, the first geographic location information can be obtained through the mobile communication module or the GPS positioning module. Since the positioning accuracy of the mobile communication module is higher than that of the GPS positioning module, the mobile communication module is preferentially used for positioning within the coverage of the mobile communication. If the mobile communication signal is poor or the mobile communication coverage is out of range, the GPS communication module is used for positioning.
在一些实施例中,所述控制定位模块采集所述电子设备的位置信息,还包括:控制UWB定位模块与UWB基站进行通信,获取所述电子设备的第二地理位置信息。这里,第一地理位置信息和第二位置信息共同组成电子设备的地理位置信息。In some embodiments, the controlling the positioning module to collect the position information of the electronic device further includes: controlling the UWB positioning module to communicate with the UWB base station to obtain the second geographic position information of the electronic device. Here, the first geographic location information and the second location information together constitute geographic location information of the electronic device.
也就是说,由于UWB定位模块具有较高的室内定位精度,若在室内,则还可以利用UWB定位模块进行定位得到第二地理位置信息,第二地理位置信息表示室内的具体位置,比如,楼层、房间等室内信息。利用第二地理位置信息和第一地理位置信息能够更加准确的表示电子设备当前位置,提高后续搜索范围的准确性。That is to say, since the UWB positioning module has high indoor positioning accuracy, if it is indoors, the UWB positioning module can also be used for positioning to obtain the second geographic location information, and the second geographic location information represents the specific indoor location, for example, the floor , room and other indoor information. Using the second geographic location information and the first geographic location information can more accurately represent the current location of the electronic device and improve the accuracy of the subsequent search range.
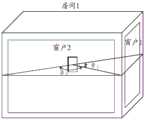
图3为本申请实施例室内定位示意图,如图3所示,根据UWB定位模块检测到的距离信息确定用户手持手机(即电子设备)位于一栋大楼的房间1中,若用户手持手机面向窗户1,此时UWB定位模块检测到的角度信息为θ1,若用户手持手机面向窗户2时,此时UWB定位模块检测到的角度信息为θ2。3 is a schematic diagram of indoor positioning according to an embodiment of the present application. As shown in FIG. 3 , according to the distance information detected by the UWB positioning module, it is determined that the user's hand-held mobile phone (that is, an electronic device) is located in
步骤203:根据所述地理位置信息确定搜索中心,根据所述角度信息确定搜索角度;Step 203: Determine a search center according to the geographic location information, and determine a search angle according to the angle information;
步骤204:根据所述搜索中心和所述搜索角度确定搜索范围;Step 204: Determine a search range according to the search center and the search angle;
这里,搜索范围可以为正多边形、圆形。Here, the search range can be a regular polygon or a circle.
在一些实施例中,步骤204可以替换为:根据所述搜索中心、所述搜索角度和搜索距离,确定搜索范围。这里,搜索距离可以包括一个距离或两个距离,当包括一个距离时搜索范围为扇形,当包括两个距离值时搜索范围为部分环形。In some embodiments,
图4为本申请实施例中搜索范围的第一示意图,如图4所示,以电子设备所在位置为搜索中心,搜索角度为θ1,确定搜索范围(图4中阴影区域)。搜索半径r可以是默认扫描距离。FIG. 4 is a first schematic diagram of the search range in the embodiment of the application. As shown in FIG. 4 , the search range is determined with the location of the electronic device as the search center and the search angle as θ1 (the shaded area in FIG. 4 ). The search radius r may be the default scan distance.
在一些实施例中,第一图像可以为包含深度信息,根据深度信息和图像采集模块的拍摄参数,能够估计拍摄对象与镜头之间的距离,根据估计的距离确定搜索半径范围,从而可以得到一个环形搜索范围,如图5所示。In some embodiments, the first image may contain depth information. According to the depth information and the shooting parameters of the image acquisition module, the distance between the shooting object and the lens can be estimated, and the search radius range can be determined according to the estimated distance, so that a The circular search range is shown in Figure 5.
在一些实施例中,所述方法还包括:提取所述第一图像的第一图像特征;In some embodiments, the method further comprises: extracting a first image feature of the first image;
相应的,所述根据所述搜索范围从所述图像数据库中确定所述图像集合,包括:从所述图像数据库确定位于所述搜索范围内且所述第一图像特征相同的图像,组成所述图像集合。Correspondingly, the determining the image set from the image database according to the search range includes: determining images from the image database that are located in the search range and have the same characteristics of the first image, and form the image set. image collection.
这里,第一图像特征可以为图像特征的整体特征,比如可以为图像的边缘特征,根据图像边缘特征可以对搜索范围内的图像进行初步筛选,确定边缘特征相似的图像组成图像集合,利用整体特征可以筛选掉差异性较大的图像提高后续处理效率。后续再通过细节特征对比确定目标第二图像。Here, the first image feature may be the overall feature of the image feature, such as the edge feature of the image. According to the edge feature of the image, the images within the search range can be preliminarily screened, and images with similar edge features can be determined to form an image set, and the overall feature can be used to form an image set. Images with large differences can be filtered out to improve the efficiency of subsequent processing. Subsequently, the second image of the target is determined by comparing the detailed features.
步骤205:根据所述搜索范围从所述图像数据库中确定所述图像集合;Step 205: Determine the image set from the image database according to the search range;
具体地,根据所述位置信息和预设距离,确定搜索范围;从所述图像数据库确定位于搜索范围内的图像,组成图像集合。Specifically, the search range is determined according to the position information and the preset distance; the images located in the search range are determined from the image database to form an image set.
也就是说,可以以电子设备所处位置为圆心,以预设距离为半径画园,确定搜索范围。这里,当预设距离包含一个距离值时,搜索范围为一个圆形,当预设距离包含两个距离值时,搜索范围为一个圆环。That is to say, a circle can be drawn with the position of the electronic device as the center and the preset distance as the radius to determine the search range. Here, when the preset distance includes one distance value, the search range is a circle, and when the preset distance includes two distance values, the search range is a circle.
预设距离可以为预先设置的默认扫描距离,或者根据第一图像估计未知目的地与电子设备之间的距离。The preset distance may be a preset default scanning distance, or an estimated distance between the unknown destination and the electronic device according to the first image.
示例性的,所述方法还包括:根据所述第一图像的深度信息,确定所述预设距离。Exemplarily, the method further includes: determining the preset distance according to the depth information of the first image.
步骤206:将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;Step 206: Perform image feature matching between the first image and the second image in the image set, and determine the target second image that satisfies the matching condition;
具体地,采用图像特征提取算法对第一图像和第二图像进行特征提取,将第一图像中的特征信息与第二图像中的特征信息进行比较,得到相似度最高的一张或多张第二图像。示例性的,匹配条件可以为相同特征数量大于预设数量,或者,相同特征数量最多。Specifically, an image feature extraction algorithm is used to perform feature extraction on the first image and the second image, and the feature information in the first image is compared with the feature information in the second image, and one or more images with the highest similarity are obtained. Second image. Exemplarily, the matching condition may be that the number of the same features is greater than the preset number, or the number of the same features is the largest.
步骤207:确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息,并显示。Step 207: Determine and display the location information of the unknown destination as the location information corresponding to the second image of the target.
实际应用中,未知目的地可以为电子设备周围一定范围内的地方,使用户可以通过图像采集模块采集到包含未知目的地特征的第一图像,或者,周围其他用于使用其他电子设备拍摄的第一图像,并发送给该电子设备。In practical applications, the unknown destination can be a place within a certain range around the electronic device, so that the user can collect the first image containing the characteristics of the unknown destination through the image acquisition module, or other surrounding images used for shooting with other electronic devices. an image and send it to the electronic device.
示例性的,用户站在室内窗户边对窗外的未知景点、街道或建筑物进行拍摄,采用本申请实施例这种定位方法对未知目的地进行识别,确定未知目的地的位置信息。Exemplarily, a user stands by an indoor window to photograph an unknown scenic spot, street or building outside the window, uses the positioning method of the embodiment of the present application to identify the unknown destination, and determines the location information of the unknown destination.
在一些实施例中,所述方法还包括:根据所述电子设备的位置信息和所述未知目的地的位置信息,生成导航信息;控制信息输出单元输出所述导航信息;或者,根据所述未知目的地的位置信息,查询所述未知目的地的周边信息。In some embodiments, the method further includes: generating navigation information according to the position information of the electronic device and the position information of the unknown destination; controlling the information output unit to output the navigation information; or, according to the unknown destination The location information of the destination, and query the surrounding information of the unknown destination.
也就是说,在确定未知目的地的位置信息之后,还可以利用电子设备的导航功能获取到达此处的导航信息并显示给用户。或者,利用电子设备的查询功能查询此处的周边信息并显示给用户,比如,美食、景点、酒店、停车场等信息。That is to say, after the location information of the unknown destination is determined, the navigation function of the electronic device can also be used to obtain the navigation information to reach the destination and display it to the user. Or, use the query function of the electronic device to query the surrounding information here and display it to the user, such as food, scenic spots, hotels, parking lots and other information.
采用上述技术方案,通过对未知目的地的标志性物体进行拍摄得到第一图像,并根据电子设备的位置信息从图像数据库筛选出图像集合,进一步将第一图像与图像集合中的第二图像进行图像特征匹配,来实现对未知目的地的识别,丰富了导航产品的定位功能。Using the above technical solution, a first image is obtained by photographing an iconic object of an unknown destination, and an image set is selected from the image database according to the position information of the electronic device, and the first image is further compared with the second image in the image set. Image feature matching is used to identify unknown destinations and enrich the positioning function of navigation products.
为了能更加体现本申请的目的,在本申请上述实施例的基础上,基于图像识别融合UWB、5G与GPS定位的一种定位方法进行进一步的举例说明,如图6所示,该方法具体包括:In order to better reflect the purpose of the present application, on the basis of the above-mentioned embodiments of the present application, a positioning method based on image recognition fusion of UWB, 5G and GPS positioning is further illustrated. As shown in FIG. 6 , the method specifically includes: :
步骤601:获取第一图像、开启UWB定位功能和5G定位功能;Step 601: acquiring a first image, enabling the UWB positioning function and the 5G positioning function;
这里,开始时用户想要查询可视范围内的某未知目的地,使用手机对准未知目的地进行拍摄得到第一图像,同时开启手机UWB定位功能与5G的定位功能;Here, at the beginning, the user wants to query an unknown destination within the visible range, and uses the mobile phone to shoot at the unknown destination to obtain the first image, and at the same time enables the UWB positioning function and 5G positioning function of the mobile phone;
步骤602:UWB基站进行定位,并发送UWB定位数据给手机;5G基站进行定位,并发送5G定位数据给手机;开启GPS定位;Step 602: the UWB base station performs positioning and sends the UWB positioning data to the mobile phone; the 5G base station performs positioning and sends the 5G positioning data to the mobile phone; and enables GPS positioning;
UWB的优势是精准的室内定位,即当用户处于室内环境下拍摄到的远方未知景色作为第一图像时,也可通过室内的UWB基站与终端设备进行UWB通信,利用TDOA与PDOA技术获取手机拍摄时的位置与角度信息;The advantage of UWB is accurate indoor positioning, that is, when the user is in the indoor environment to capture the distant unknown scenery as the first image, UWB communication can also be performed with the terminal equipment through the indoor UWB base station, and the TDOA and PDOA technologies are used to obtain mobile phone shots. time position and angle information;
5G的优势在于5G基站的分布广泛性与相对精确的定位信息,手机可通过5G信号与周围的5G基站设备进行信号交互,获取较为精确的相对建筑物位置;The advantage of 5G lies in the widespread distribution of 5G base stations and relatively accurate positioning information. Mobile phones can interact with surrounding 5G base station equipment through 5G signals to obtain relatively accurate relative building positions;
获取到手机所在建筑物的位置及在建筑物内部的具体位置、角度信息后,同时开启GPS运行导航APP,将获取到的位置信息给到APP,结合APP通过GPS卫星定位获取到的建筑物的具体坐标,从而会得到一个相对精准的拍摄位置与角度;After obtaining the location of the building where the mobile phone is located and the specific location and angle information inside the building, open the GPS to run the navigation APP at the same time, send the obtained location information to the APP, and combine the APP to obtain the building's location through GPS satellite positioning. With specific coordinates, a relatively accurate shooting position and angle will be obtained;
这里,通过融合UWB、5G及GPS定位完成了从室内到室外的精准定位。Here, accurate positioning from indoor to outdoor is completed by integrating UWB, 5G and GPS positioning.
步骤603:导航APP筛选出图像集合;Step 603: The navigation APP filters out the image set;
根据拍摄地理位置与角度提取20KM内导航APP通过高精度的航空摄影采集的图像数据(即图像集合);Extract the image data (ie image collection) collected by the navigation APP within 20KM through high-precision aerial photography according to the shooting location and angle;
步骤604:图像特征对比;Step 604: image feature comparison;
对图像进行特征提取,与筛选出较为相似的图像进行特征比对,细节特征最多的图像即为目标第二图像;Perform feature extraction on the image, and compare the features with the screened out more similar images, and the image with the most detailed features is the second target image;
步骤605:得到第一图像所在位置的位置信息;Step 605: Obtain the location information of the location where the first image is located;
步骤606:根据位置信息推送形成建议及相关信息。Step 606: Push and form suggestions and related information according to the location information.
上述定位方法可以为用户出行、旅游提供了极大的方便,用户可以对看到的感兴趣的未知地域进行拍照比对导航,直接得到位置信息,丰富了导航产品功能,用户不用担心周围没有行人或语言不通的问题,提高用户对导航产品的使用体验。The above positioning method can provide great convenience for users to travel and travel. Users can take pictures and compare and navigate the unknown areas of interest that they see, and directly obtain location information, which enriches the functions of navigation products, and users do not have to worry about no pedestrians around. Or language barriers, improve the user experience of navigation products.
为实现本申请实施例的方法,基于同一发明构思本申请实施例还提供了一种定位装置,如图7所示,该装置包括:In order to implement the method of the embodiment of the present application, based on the same inventive concept, the embodiment of the present application also provides a positioning device, as shown in FIG. 7 , the device includes:
获取模块701,用于获取包含未知目的地特征的第一图像并显示;an acquisition module 701, configured to acquire and display a first image containing unknown destination features;
定位模块702,用于采集所述电子设备的位置信息;a positioning module 702, configured to collect the position information of the electronic device;
处理模块703,用于从图像数据库中确定所述位置信息对应的图像集合;其中,所述图像数据库中的每张图像对应有位置信息;A processing module 703, configured to determine an image set corresponding to the position information from an image database; wherein, each image in the image database corresponds to position information;
所述处理模块703,还用于将所述第一图像与所述图像集合中的第二图像进行图像特征匹配,确定满足匹配条件的目标第二图像;确定所述未知目的地的位置信息为所述目标第二图像对应的位置信息;The processing module 703 is further configured to perform image feature matching between the first image and the second image in the image set, and determine the target second image that satisfies the matching condition; determine that the location information of the unknown destination is: position information corresponding to the second image of the target;
显示模块704,用于显示所述未知目的地的位置信息。The display module 704 is configured to display the location information of the unknown destination.
在一些实施例中,所述位置信息包括地理位置信息和角度信息;In some embodiments, the location information includes geographic location information and angle information;
处理模块703,具体用于根据所述地理位置信息确定搜索中心;根据所述角度信息确定搜索角度;根据所述搜索中心和所述搜索角度确定搜索范围;根据所述搜索范围从所述图像数据库中确定所述图像集合。The processing module 703 is specifically configured to determine a search center according to the geographic location information; determine a search angle according to the angle information; determine a search range according to the search center and the search angle; to determine the set of images.
在一些实施例中,处理模块703,还用于提取所述第一图像的第一图像特征;In some embodiments, the processing module 703 is further configured to extract the first image feature of the first image;
处理模块703,具体用于从所述图像数据库确定位于所述搜索范围内且所述第一图像特征相同的图像,组成所述图像集合。The processing module 703 is specifically configured to determine, from the image database, images located in the search range and having the same characteristics of the first image to form the image set.
在一些实施例中,定位模块702可以包括以下至少一个:In some embodiments, the positioning module 702 may include at least one of the following:
UWB定位模块,用于与UWB基站进行通信,获取所述电子设备的角度信息;The UWB positioning module is used to communicate with the UWB base station to obtain the angle information of the electronic device;
移动通信模块,用于与移动通信基站进行通信,获取所述电子设备的角度信息;a mobile communication module, configured to communicate with a mobile communication base station to obtain angle information of the electronic device;
GPS定位模块,用于与GPS卫星进行通信,获取所述电子设备的角度信息。The GPS positioning module is used for communicating with GPS satellites to obtain the angle information of the electronic device.
在一些实施例中,定位模块702可以包括以下至少一个:In some embodiments, the positioning module 702 may include at least one of the following:
5G定位模块,用于与5G基站进行通信,获取所述电子设备的第一地理位置信息;a 5G positioning module, configured to communicate with a 5G base station to obtain the first geographic location information of the electronic device;
GPS定位模块,用于与GPS卫星进行通信,获取所述电子设备的第一地理位置信息;A GPS positioning module, configured to communicate with GPS satellites to obtain the first geographic location information of the electronic device;
相应的,定位模块702,还包括:UWB定位模块,用于与UWB基站进行通信,获取所述电子设备的第二地理位置信息。Correspondingly, the positioning module 702 further includes: a UWB positioning module, configured to communicate with the UWB base station to obtain the second geographic location information of the electronic device.
在一些实施例中,获取模块701为图像采集模块或者通信模块;其中,In some embodiments, the acquisition module 701 is an image acquisition module or a communication module; wherein,
图像采集模块,用于采集所述第一图像;通信模块,用于获取其他电子设备发送的所述第一图像。The image acquisition module is used to acquire the first image; the communication module is used to acquire the first image sent by other electronic devices.
基于上述定位装置中各模块的硬件实现,本申请实施例还提供了一种电子设备,如图8所示,该电子设备包括:处理器801和配置为存储能够在处理器上运行的计算机程序的存储器802;Based on the hardware implementation of each module in the above positioning device, an embodiment of the present application further provides an electronic device, as shown in FIG. 8 , the electronic device includes: a processor 801 and a computer program configured to store a computer program that can be executed on the processor the memory 802;
其中,处理器801配置为运行计算机程序时,执行前述实施例中的方法步骤。Wherein, the processor 801 is configured to execute the method steps in the foregoing embodiments when running a computer program.
当然,实际应用时,如图8所示,该电子设备中的各个组件通过总线系统803耦合在一起。可理解,总线系统803用于实现这些组件之间的连接通信。总线系统803除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。但是为了清楚说明起见,在图8中将各种总线都标为总线系统803。Of course, in practical application, as shown in FIG. 8 , various components in the electronic device are coupled together through a
在实际应用中,上述处理器可以为特定用途集成电路(ASIC,ApplicationSpecific Integrated Circuit)、数字信号处理装置(DSPD,Digital Signal ProcessingDevice)、可编程逻辑装置(PLD,Programmable Logic Device)、现场可编程门阵列(Field-Programmable Gate Array,FPGA)、控制器、微控制器、微处理器中的至少一种。可以理解地,对于不同的设备,用于实现上述处理器功能的电子器件还可以为其它,本申请实施例不作具体限定。In practical applications, the above-mentioned processor may be an application specific integrated circuit (ASIC, Application Specific Integrated Circuit), a digital signal processing device (DSPD, Digital Signal Processing Device), a programmable logic device (PLD, Programmable Logic Device), a field programmable gate At least one of an array (Field-Programmable Gate Array, FPGA), a controller, a microcontroller, and a microprocessor. It can be understood that, for different devices, the electronic device used to implement the above processor function may also be other, which is not specifically limited in the embodiment of the present application.
上述存储器可以是易失性存储器(volatile memory),例如随机存取存储器(RAM,Random-Access Memory);或者非易失性存储器(non-volatile memory),例如只读存储器(ROM,Read-Only Memory),快闪存储器(flash memory),硬盘(HDD,Hard Disk Drive)或固态硬盘(SSD,Solid-State Drive);或者上述种类的存储器的组合,并向处理器提供指令和数据。The above-mentioned memory can be a volatile memory (volatile memory), such as a random access memory (RAM, Random-Access Memory); or a non-volatile memory (non-volatile memory), such as a read-only memory (ROM, Read-Only Memory) Memory), flash memory (flash memory), hard disk (HDD, Hard Disk Drive) or solid-state drive (SSD, Solid-State Drive); or a combination of the above types of memory, and provide instructions and data to the processor.
在示例性实施例中,本申请实施例还提供了一种计算机可读存储介质,例如包括计算机程序的存储器,计算机程序可由电子设备的处理器执行,以完成前述方法的步骤。In an exemplary embodiment, an embodiment of the present application further provides a computer-readable storage medium, such as a memory including a computer program, and the computer program can be executed by a processor of an electronic device to complete the steps of the foregoing method.
应当理解,在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。本申请中表述“具有”、“可以具有”、“包括”和“包含”、或者“可以包括”和“可以包含”在本文中可以用于指示存在对应的特征(例如,诸如数值、功能、操作或组件等元素),但不排除附加特征的存在。It should be understood that the terminology used in the present application is for the purpose of describing particular embodiments only, and is not intended to limit the present application. As used in this application and the appended claims, the singular forms "a," "the," and "the" are intended to include the plural forms as well, unless the context clearly dictates otherwise. It will also be understood that the term "and/or" as used herein refers to and includes any and all possible combinations of one or more of the associated listed items. The expressions "have", "may have", "include" and "include", or "may include" and "may include" in this application may be used herein to indicate the presence of a corresponding feature (eg, such as a value, function, elements such as operations or components), but does not preclude the presence of additional features.
应当理解,尽管在本申请可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开,不必用于描述特定的顺序或先后次序。例如,在不脱离本发明范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。It should be understood that although the terms first, second, third, etc. may be used in this application to describe various information, such information should not be limited by these terms. These terms are only used to distinguish the same type of information from one another, and are not necessarily used to describe a particular order or sequence. For example, the first information may also be referred to as the second information, and similarly, the second information may also be referred to as the first information, without departing from the scope of the present invention.
本申请实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。The technical solutions described in the embodiments of the present application may be combined arbitrarily if there is no conflict.
在本申请所提供的几个实施例中,应该理解到,所揭露的方法、装置和设备,可以通过其它的方式实现。以上所描述的实施例仅仅是示意性的,例如,单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个单元或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的各组成部分相互之间的耦合、或直接耦合、或通信连接可以是通过一些接口,设备或单元的间接耦合或通信连接,可以是电性的、机械的或其它形式的。In the several embodiments provided in this application, it should be understood that the disclosed method, apparatus and device may be implemented in other manners. The above-described embodiments are only illustrative. For example, the division of units is only a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components may be combined, or may be integrated into Another system, or some features can be ignored, or not implemented. In addition, the coupling, or direct coupling, or communication connection between the components shown or discussed may be through some interfaces, and the indirect coupling or communication connection of devices or units may be electrical, mechanical or other forms. of.
上述作为分离部件说明的单元可以是、或也可以不是物理上分开的,作为单元显示的部件可以是、或也可以不是物理单元,即可以位于一个地方,也可以分布到多个网络单元上;可以根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。The unit described above as a separate component may or may not be physically separated, and the component displayed as a unit may or may not be a physical unit, that is, it may be located in one place or distributed to multiple network units; Some or all of the units may be selected according to actual needs to achieve the purpose of the solution in this embodiment.
另外,在本申请各实施例中的各功能单元可以全部集成在一个处理单元中,也可以是各单元分别单独作为一个单元,也可以两个或两个以上单元集成在一个单元中;上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。In addition, each functional unit in each embodiment of the present application may all be integrated into one processing unit, or each unit may be separately used as a unit, or two or more units may be integrated into one unit; the above integration The unit can be implemented either in the form of hardware or in the form of hardware plus software functional units.
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。The above are only specific embodiments of the present application, but the protection scope of the present application is not limited to this. should be covered within the scope of protection of this application.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110245990.5ACN113076443A (en) | 2021-03-05 | 2021-03-05 | Positioning method, positioning device, electronic equipment and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110245990.5ACN113076443A (en) | 2021-03-05 | 2021-03-05 | Positioning method, positioning device, electronic equipment and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113076443Atrue CN113076443A (en) | 2021-07-06 |
Family
ID=76612084
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110245990.5APendingCN113076443A (en) | 2021-03-05 | 2021-03-05 | Positioning method, positioning device, electronic equipment and storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113076443A (en) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101924992A (en)* | 2010-07-30 | 2010-12-22 | 中国电信股份有限公司 | Method, system and equipment for acquiring scene information through mobile terminal |
| CN103440318A (en)* | 2013-08-29 | 2013-12-11 | 王靖洲 | System for identifying sights of mobile terminal |
| CN104422439A (en)* | 2013-08-21 | 2015-03-18 | 希姆通信息技术(上海)有限公司 | Navigation method, apparatus, server, navigation system and use method of system |
| CN109100768A (en)* | 2018-08-01 | 2018-12-28 | 南京科远自动化集团股份有限公司 | A kind of synthesized positioning method and positioning label |
| CN110132274A (en)* | 2019-04-26 | 2019-08-16 | 中国铁道科学研究院集团有限公司电子计算技术研究所 | A kind of indoor orientation method, device, computer equipment and storage medium |
| CN111161354A (en)* | 2019-12-30 | 2020-05-15 | 广东博智林机器人有限公司 | Camera pose determining method and device, electronic equipment and storage medium |
| CN210893162U (en)* | 2019-09-25 | 2020-06-30 | 国电龙源电气有限公司 | An indoor and outdoor integrated positioning system |
| CN112034502A (en)* | 2020-08-05 | 2020-12-04 | 首钢京唐钢铁联合有限责任公司 | Real-time positioning system for production personnel |
| WO2020259360A1 (en)* | 2019-06-28 | 2020-12-30 | Oppo广东移动通信有限公司 | Locating method and device, terminal, and storage medium |
- 2021
- 2021-03-05CNCN202110245990.5Apatent/CN113076443A/enactivePending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101924992A (en)* | 2010-07-30 | 2010-12-22 | 中国电信股份有限公司 | Method, system and equipment for acquiring scene information through mobile terminal |
| CN104422439A (en)* | 2013-08-21 | 2015-03-18 | 希姆通信息技术(上海)有限公司 | Navigation method, apparatus, server, navigation system and use method of system |
| CN103440318A (en)* | 2013-08-29 | 2013-12-11 | 王靖洲 | System for identifying sights of mobile terminal |
| CN109100768A (en)* | 2018-08-01 | 2018-12-28 | 南京科远自动化集团股份有限公司 | A kind of synthesized positioning method and positioning label |
| CN110132274A (en)* | 2019-04-26 | 2019-08-16 | 中国铁道科学研究院集团有限公司电子计算技术研究所 | A kind of indoor orientation method, device, computer equipment and storage medium |
| WO2020259360A1 (en)* | 2019-06-28 | 2020-12-30 | Oppo广东移动通信有限公司 | Locating method and device, terminal, and storage medium |
| CN210893162U (en)* | 2019-09-25 | 2020-06-30 | 国电龙源电气有限公司 | An indoor and outdoor integrated positioning system |
| CN111161354A (en)* | 2019-12-30 | 2020-05-15 | 广东博智林机器人有限公司 | Camera pose determining method and device, electronic equipment and storage medium |
| CN112034502A (en)* | 2020-08-05 | 2020-12-04 | 首钢京唐钢铁联合有限责任公司 | Real-time positioning system for production personnel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9906921B2 (en) | Updating points of interest for positioning | |
| Vo et al. | A survey of fingerprint-based outdoor localization | |
| CN109029444B (en) | An indoor navigation system and navigation method based on image matching and spatial positioning | |
| US9286545B1 (en) | System and method of using images to determine correspondence between locations | |
| KR100843094B1 (en) | Image file management device and method | |
| CN103827634A (en) | Logo detection for indoor positioning | |
| CN106447585A (en) | Urban area and indoor high-precision visual positioning system and method | |
| JP2016048247A (en) | Human assisted techniques for providing local maps and location-specific annotated data | |
| CN104145173A (en) | Visual ocr for positioning | |
| CN103761539B (en) | Indoor locating method based on environment characteristic objects | |
| US9195987B2 (en) | Systems and methods of correlating business information to determine spam, closed businesses, and ranking signals | |
| KR20090019184A (en) | An image reproducing apparatus using an image file included in an electronic map, a recording method thereof, and a recording medium having recorded thereon a program for executing the method. | |
| JP6591594B2 (en) | Information providing system, server device, and information providing method | |
| TWI749532B (en) | Positioning method and positioning device, electronic equipment and computer readable storage medium | |
| EP3138018A1 (en) | Identifying entities to be investigated using storefront recognition | |
| Feng et al. | Visual Map Construction Using RGB‐D Sensors for Image‐Based Localization in Indoor Environments | |
| WO2021027215A1 (en) | Positioning information creation method, vehicle-mounted terminal, server device, and positioning system | |
| Steinhoff et al. | How computer vision can help in outdoor positioning | |
| CN107193820B (en) | Location information acquisition method, device and device | |
| WO2024083010A9 (en) | Visual localization method and related apparatus | |
| Xue et al. | A fast visual map building method using video stream for visual-based indoor localization | |
| CN113076443A (en) | Positioning method, positioning device, electronic equipment and storage medium | |
| JP7144164B2 (en) | Information provision system, server device, and terminal program | |
| US12276729B2 (en) | Method, apparatus, and system for location sharing using a LiDAR-based location signature | |
| KR20130068463A (en) | System for providing history information using location based information service and the method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |