CN112710253B - Three-dimensional scanner and three-dimensional scanning method - Google Patents
Three-dimensional scanner and three-dimensional scanning methodDownload PDFInfo
- Publication number
- CN112710253B CN112710253BCN201911018729.0ACN201911018729ACN112710253BCN 112710253 BCN112710253 BCN 112710253BCN 201911018729 ACN201911018729 ACN 201911018729ACN 112710253 BCN112710253 BCN 112710253B
- Authority
- CN
- China
- Prior art keywords
- light
- image
- camera
- target object
- fringe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0088—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for oral or dental tissue
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/254—Projection of a pattern, viewing through a pattern, e.g. moiré
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/40—Analysis of texture
- G06T7/49—Analysis of texture based on structural texture description, e.g. using primitives or placement rules
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Theoretical Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Signal Processing (AREA)
- Psychiatry (AREA)
- Physiology (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请涉及三维扫描领域,具体而言,涉及一种三维扫描仪和三维扫描方法。The present application relates to the field of three-dimensional scanning, and in particular, relates to a three-dimensional scanner and a three-dimensional scanning method.
背景技术Background technique
针对口腔内部的三维扫描领域,现有三维扫描仪通常使用如下方式进行三维重建处理:其一、基于时间编码的正弦条纹解相匹配,然后三维重建和拼接融合,获取物体的三维形貌;其二、基于时间编码的条纹中心线提取并三维重建和拼接融合的算法,获取物体的三维形貌;其三、基于显微共焦三维成像原理获取物体的三维形貌。For the field of 3D scanning inside the oral cavity, the existing 3D scanners usually use the following methods for 3D reconstruction processing: first, the sinusoidal fringe solution matching based on time code, and then 3D reconstruction and splicing fusion to obtain the 3D shape of the object; 2. Based on time-coded stripe centerline extraction and 3D reconstruction and splicing and fusion algorithms, the 3D shape of the object can be obtained; 3. Based on the principle of micro confocal 3D imaging, the 3D shape of the object can be obtained.
但是,上述各个方式各有缺陷,并不适合于将口腔内部的三维扫描装置进行推广使用,具体缺陷如下:However, each of the above methods has its own defects, and is not suitable for popularizing and using the three-dimensional scanning device inside the oral cavity. The specific defects are as follows:
首先,基于时间编码的三维重建方法较难实现小体积的手持式扫描,进而导致无法应用于口腔内部的三维扫描领域,此外,基于时间编码的三维重建方法还需要高帧率相机和高速算法支持,进而导致三维扫描设备的生成成本较高,不利于推广使用;First of all, the 3D reconstruction method based on time coding is difficult to realize small-volume hand-held scanning, which makes it impossible to apply to the field of 3D scanning inside the oral cavity. In addition, the 3D reconstruction method based on time coding also requires high frame rate cameras and high-speed algorithm support , which in turn leads to higher production costs of 3D scanning equipment, which is not conducive to popularization and use;
其次,基于显微共焦三维成像原理的进行三维重建时,所需硬件成本较高,同样不利于三维扫描设备的推广使用。Secondly, when performing 3D reconstruction based on the principle of microscopic confocal 3D imaging, the required hardware costs are relatively high, which is also unfavorable for the popularization and use of 3D scanning equipment.
针对相关技术中,现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题,目前尚未提出有效的解决方案。In the related art, the existing 3D reconstruction method requires high hardware cost, which is not conducive to the popularization and use of 3D scanning devices. No effective solution has been proposed yet.
发明内容Contents of the invention
本申请提供一种三维扫描仪和三维扫描方法,以解决相关技术中现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题。The present application provides a three-dimensional scanner and a three-dimensional scanning method to solve the technical problems in the related art that the existing three-dimensional reconstruction methods require high hardware costs and are not conducive to the popularization and use of three-dimensional scanning devices.
根据本申请的一个方面,提供了一种三维扫描仪。该三维扫描仪包括:投影装置,用于投射光线至目标对象上,其中,所述光线包括以彩色编码条纹形式投射的预设光线,其中,所述彩色编码条纹至少由两种颜色条纹编码组成;图像采集装置,用于在所述目标对象被所述投影装置投射光线的情况下,采集经所述目标对象调制的光线,以获取至少一个条纹图像,其中,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对所述目标对象进行三维重建。According to one aspect of the present application, a three-dimensional scanner is provided. The three-dimensional scanner includes: a projection device for projecting light onto a target object, wherein the light includes preset light projected in the form of color-coded stripes, wherein the color-coded stripes are composed of at least two color-coded stripes An image acquisition device, configured to collect light modulated by the target object when the target object is projected by the projection device to obtain at least one fringe image, wherein the obtained fringe image is used as a coded image to determine each fringe sequence, and to perform three-dimensional reconstruction on the target object as a reconstruction map.
可选的,所述图像采集装置还包括多个相机,所述多个相机中至少包含一个黑白相机,其中,所述图像采集装置通过所述多个相机对所述经目标对象调制的光线进行采集,得到多个条纹图像,其中,至少一个所述黑白相机所得到的条纹图像作为重建图以对所述目标对象进行三维重建;以及,至少多个黑白相机所得到的条纹图像作为编码图以确定个各条纹序列,和/或,至少一个彩色相机所得到的条纹图像作为编码图以确定个各条纹序列。Optionally, the image acquisition device further includes a plurality of cameras, and the plurality of cameras include at least one black-and-white camera, wherein the image acquisition device uses the plurality of cameras to monitor the light modulated by the target object. Collecting and obtaining a plurality of fringe images, wherein at least one fringe image obtained by the black-and-white camera is used as a reconstruction image to perform three-dimensional reconstruction of the target object; and the fringe images obtained by at least a plurality of black-and-white cameras are used as an encoding image to Each fringe sequence is determined, and/or, the fringe image obtained by at least one color camera is used as a coding image to determine each fringe sequence.
可选的,图像采集装置还包括光束处理装置,所述光束处理装置包含进光部和至少两个出光部,其中,各个相机分别对应不同的出光部设置,所述图像采集装置通过光束处理装置以采集经所述目标对象调制的光线。Optionally, the image acquisition device further includes a beam processing device, the beam processing device includes a light entrance part and at least two light exit parts, wherein each camera is set corresponding to a different light exit part, and the image acquisition device passes through the beam processing device to collect light modulated by the target object.
可选的,所述光束处理装置还包含至少一个第一光束分离单元,所述第一光束分离单元用于对从进光部投射进的光线进行分光处理,以便所述光线分别从所述至少两个出光部投射至所述出光部对应设置的相机。Optionally, the beam processing device further includes at least one first beam splitting unit, and the first beam splitting unit is used to perform spectroscopic processing on the light projected from the light entrance part, so that the light beams are separated from the at least The two light emitting parts are projected to the cameras corresponding to the light emitting parts.
可选的,所述光束处理装置还包含至少一个第二光束分离单元,所述第二光束分离单元用于对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线,其中,所述彩色编码条纹中包含所述指定波段所对应的颜色的条纹。Optionally, the beam processing device further includes at least one second beam splitting unit, and the second beam splitting unit is used to separate and process the light to be acquired by the specified camera, so that the specified camera can acquire light that includes a specified waveband. The light, wherein the color-coded stripes include stripes of colors corresponding to the specified wavelength bands.
可选的,所述指定相机为所述黑白相机。Optionally, the specified camera is the black and white camera.
可选的,所述光束处理装置包括直角两通道分色棱镜,且,所述直角两通道分色棱镜包含第三出光部和第四出光部,其中,所述光束处理装置通过所述直角两通道分色棱镜,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第三出光部和所述第四出光部投射至各自出光部对应设置的相机;所述图像采集装置包括与所述第三出光部对应设置的第三相机,以及与第四出光部对应设置的第四相机,第三相机基于采集到的光线生成第三条纹图像,第四相机基于采集到的光线生成第四条纹图像,第三条纹图像与第四条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别;其中,所述光束处理装置通过所述直角两通道分色棱镜,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线,其中,所述指定相机获取到包含指定波段的光线包括:所述第三相机获取到第一滤光波段的光线,和/或,所述第四相机获取到第二滤光波段的光线。Optionally, the beam processing device includes a right-angle two-channel dichroic prism, and the right-angle two-channel dichroic prism includes a third light exit part and a fourth light exit part, wherein the beam processing device passes through the right-angle two-channel dichroic prism The channel dichroic prism realizes spectroscopic processing of the light projected from the light entrance part, so that the light is respectively projected from the third light exit part and the fourth light exit part to the cameras corresponding to the respective light exit parts; The image acquisition device includes a third camera arranged corresponding to the third light outlet, and a fourth camera arranged corresponding to the fourth light outlet. The third camera generates a third fringe image based on the collected light, and the fourth camera generates a third fringe image based on the collected light. The received light generates a fourth fringe image, the third fringe image and the fourth fringe image include stripes of at least two colors and the fringes of at least two colors are identifiable; A chromatic prism is used to separate and process the light to be acquired by the designated camera, so that the designated camera obtains the light containing the designated waveband, wherein the obtaining of the light containing the designated waveband by the designated camera includes: obtaining by the third camera The light in the first filter band, and/or, the fourth camera acquires the light in the second filter band.
可选的,所述光束处理装置包括三通道分色棱镜,且,所述三通道分色棱镜包含第五出光部、第六出光部和第七出光部,其中,所述光束处理装置通过所述三通道分色棱镜,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第五出光部、所述第六出光部和所述第七出光部投射至各自出光部对应设置的相机;所述图像采集装置包括与所述第五出光部对应设置的第五相机、与第六出光部对应设置的第六相机,以及与所述第七出光部对应设置的第七相机,第五相机基于采集到的光线生成第五条纹图像,第六相机基于采集到的光线生成第六条纹图像,第七相机基于采集到的光线生成第七条纹图像,第五条纹图像、第六条纹图像和第七条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别;其中,所述光束处理装置通过所述三通道分色棱镜,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线,其中,所述指定相机获取到包含指定波段的光线至少包括:所述第五相机获取到第三滤光波段的光线、所述第六相机获取到第四滤光波段的光线,且所述第三滤光波段不同于所述第四滤光波段。Optionally, the beam processing device includes a three-channel dichroic prism, and the three-channel dichroic prism includes a fifth light exit part, a sixth light exit part, and a seventh light exit part, wherein the beam processing device passes through the The three-channel dichroic prism realizes the light splitting process on the light projected from the light-incoming part, so that the light is respectively projected from the fifth light-outgoing part, the sixth light-outgoing part and the seventh light-outgoing part to their respective A camera arranged corresponding to the light outlet; the image acquisition device includes a fifth camera arranged corresponding to the fifth light outlet, a sixth camera arranged corresponding to the sixth light outlet, and a camera arranged corresponding to the seventh light outlet The seventh camera, the fifth camera generates the fifth fringe image based on the collected light, the sixth camera generates the sixth fringe image based on the collected light, the seventh camera generates the seventh fringe image based on the collected light, the fifth fringe image , the sixth fringe image and the seventh fringe image include fringes of at least two colors and the fringes of at least two colors are identifiable; wherein, the beam processing device realizes the acquisition of the specified camera through the three-channel dichroic prism Separation processing is performed on the light rays, so that the designated camera obtains the light rays containing the designated waveband, wherein the designated camera obtains the light rays containing the designated waveband at least includes: the fifth camera obtains the light rays containing the third filtering waveband, The sixth camera acquires light in a fourth filter band, and the third filter band is different from the fourth filter band.
可选的,所述光束处理装置包括半反半透棱镜,且所述半反半透棱镜包含第一出光部和第二出光部,其中,所述光束处理装置通过所述半反半透棱镜,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第一出光部和第二出光部投射至各自出光部对应设置的相机;所述图像采集装置包括与所述第一出光部对应设置的第一相机,以及与第二出光部对应设置的第二相机,第一相机基于采集到的光线生成第一条纹图像,第二相机基于采集到的光线生成第二条纹图像,第一条纹图像与第二条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别。Optionally, the beam processing device includes a half-reflective prism, and the half-reflective prism includes a first light-emitting part and a second light-emitting part, wherein the light beam processing device passes through the half-reflective prism , realizing the spectroscopic processing of the light projected from the light entrance part, so that the light is respectively projected from the first light exit part and the second light exit part to the cameras corresponding to the respective light exit parts; the image acquisition device includes the The first camera corresponding to the above-mentioned first light emitting part, and the second camera corresponding to the second light emitting part, the first camera generates the first fringe image based on the collected light, and the second camera generates the second fringe image based on the collected light In the fringe image, the first fringe image and the second fringe image include stripes of at least two colors, and the fringes of at least two colors are identifiable.
可选的,所述光束处理装置还包括滤光片,其中,所述光束处理装置通过所述滤光片对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含第五滤光波段的光线,且所述多个相机至少有一个相机为指定相机。Optionally, the light beam processing device further includes an optical filter, wherein the light beam processing device separates the light to be acquired by the specified camera through the optical filter, so that the specified camera acquires light that includes the fifth filter. light in the optical band, and at least one of the plurality of cameras is a designated camera.
可选的,所述三维扫描仪还包括照明件,其中,所述图像采集装置还用于在目标对象被照明件照射的情况下,采集经目标对象反射的照明光,以获取所述目标对象的纹理数据。Optionally, the three-dimensional scanner further includes an illumination element, wherein the image acquisition device is further configured to collect illumination light reflected by the target object when the target object is illuminated by the illumination element, so as to acquire the texture data.
可选的,所述图像采集装置可识别确定红光、绿光和蓝光。Optionally, the image acquisition device can identify and determine red light, green light and blue light.
根据本申请的另一方面,提供了一种三维扫描系统,该三维扫描系统包括:三维扫描仪,用于投射光线至目标对象上,并在所述目标对象被投射光线的情况下,采集经所述目标对象调制的光线,以获取至少一个条纹图像,其中,所述投射的光线包括以彩色编码条纹形式投射的预设光线,其中,所述彩色编码条纹至少由两种颜色条纹编码组成;图像处理器,与所述三维扫描仪相连接,用于获取所述三维扫描仪获取的至少一个条纹图像,并依据所述条纹图像作为编码图以确定各条纹序列,以及作为重建图以对所述目标对象进行三维重建。According to another aspect of the present application, a three-dimensional scanning system is provided, which includes: a three-dimensional scanner, configured to project light onto a target object, and when the target object is projected light, collect The light modulated by the target object to obtain at least one fringe image, wherein the projected light includes preset light projected in the form of color-coded fringes, wherein the color-coded fringes are composed of at least two color fringe codes; An image processor, connected to the 3D scanner, used to obtain at least one fringe image obtained by the 3D scanner, and use the fringe image as a coded image to determine each fringe sequence, and as a reconstruction image for all fringe images 3D reconstruction of the target object.
其中,该所述三维扫描仪为上述任意项的三维扫描仪。Wherein, the 3D scanner is any of the above 3D scanners.
可选的,在所述三维扫描仪通过多个相机对经所述目标对象调制的光线进行采集,以获取至少一个条纹图像,且所述多个相机中至少包含一个黑白相机的情况下,所述图像处理器还用于:将至少一个所述黑白相机所得到的条纹图像作为重建图以对所述目标对象进行三维重建;将至少多个黑白相机所得到的条纹图像作为编码图以确定个各条纹序列,和/或,将至少一个彩色相机所得到的条纹图像作为编码图以确定个各条纹序列。Optionally, when the three-dimensional scanner collects the light modulated by the target object through multiple cameras to obtain at least one fringe image, and the multiple cameras include at least one black and white camera, the The image processor is also used for: using the fringe image obtained by at least one black-and-white camera as a reconstruction image to perform three-dimensional reconstruction on the target object; using the fringe image obtained by at least a plurality of black-and-white cameras as an encoding image to determine Each fringe sequence, and/or, the fringe image obtained by at least one color camera is used as a coding image to determine each fringe sequence.
根据本申请的另一方面,提供了一种三维扫描方法。该三维扫描方法包括:将预设光线以彩色编码条纹的形式投射至目标对象上;采集经所述目标对象调制的光线,并基于所述光线获取至少一个条纹图像,其中,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对所述目标对象进行三维重建;基于所述编码图确定所述多个条纹图像中各条纹的序列;基于序列对所述重建图进行三维重建,获取所述目标对象的三维数据。According to another aspect of the present application, a three-dimensional scanning method is provided. The three-dimensional scanning method includes: projecting preset light rays onto a target object in the form of color-coded stripes; collecting light modulated by the target object, and acquiring at least one fringe image based on the light rays, wherein the acquired fringe image As a coding map to determine each fringe sequence, and as a reconstruction map to perform three-dimensional reconstruction of the target object; determine the sequence of each fringe in the plurality of fringe images based on the coding map; perform three-dimensional reconstruction on the reconstruction map based on the sequence and reconstructing, acquiring 3D data of the target object.
其中,该所述三维扫描方法应用于上述任意项的三维扫描仪。Wherein, the three-dimensional scanning method is applied to the three-dimensional scanner of any of the above items.
可选的,所述三维扫描方法还包括:将照明光投射至目标对象上并基于所述照明光获取所述目标对象的纹理数据;基于所述目标对象的三维数据及纹理数据,获取所述目标对象的彩色三维数据。Optionally, the three-dimensional scanning method further includes: projecting illumination light onto the target object and acquiring texture data of the target object based on the illumination light; based on the three-dimensional data and texture data of the target object, acquiring the Colored 3D data of the target object.
根据本申请的另一方面,提供了一种三维扫描方法。该三维扫描方法包括:获取第一图像和第二图像,其中,所述第一图像与所述第二图像为基于同一光束获取到的条纹图像;基于所述第一图像确定各条纹的编码序列;基于所述编码序列对所述第二图像的条纹进行条纹匹配,实现三维重建以获取目标对象的三维数据。According to another aspect of the present application, a three-dimensional scanning method is provided. The three-dimensional scanning method includes: acquiring a first image and a second image, wherein the first image and the second image are fringe images obtained based on the same light beam; determining the coding sequence of each fringe based on the first image ; performing stripe matching on the stripes of the second image based on the encoding sequence to realize three-dimensional reconstruction to acquire three-dimensional data of the target object.
其中,该所述三维扫描方法应用于上述任意项的三维扫描仪。Wherein, the three-dimensional scanning method is applied to the three-dimensional scanner of any of the above items.
可选的,所述三维扫描方法还包括:获取纹理数据,基于三维数据及纹理数据获取目标对象的彩色三维数据。Optionally, the three-dimensional scanning method further includes: acquiring texture data, and acquiring color three-dimensional data of the target object based on the three-dimensional data and the texture data.
本申请实施例提供的三维扫描仪,通过投影装置投射光线至目标对象上,其中,光线包括以彩色编码条纹形式投射的预设光线,且该彩色编码条纹至少由两种颜色条纹编码组成;图像采集装置在目标对象被投影装置投射光线的情况下,采集经目标对象调制的光线,以获取至少一个条纹图像,其中,图像采集装置的感光波段与彩色编码条纹所包含的条纹颜色一一对应,而所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建。进而解决了相关技术中,现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题。The three-dimensional scanner provided in the embodiment of the present application projects light onto the target object through a projection device, wherein the light includes preset light projected in the form of color-coded stripes, and the color-coded stripes are composed of at least two color-coded stripes; the image When the target object is projected by the projection device, the acquisition device collects the light modulated by the target object to obtain at least one fringe image, wherein the photosensitive wavelength band of the image acquisition device corresponds to the fringe colors included in the color-coded fringes, The obtained fringe image is used as a coding image to determine each fringe sequence, and as a reconstruction image to perform three-dimensional reconstruction of the target object. Furthermore, in the related art, the technical problem that the hardware cost required by the existing three-dimensional reconstruction method is relatively high, which is unfavorable for popularization and use of the three-dimensional scanning device is solved.
需要说明的是:由于本申请实施例所提及的三维扫描仪是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的。因此,该三维扫描仪最低仅需一帧二维图像即可实现目标对象的三维重建,大大降低了相机帧率和算法的运算成本,使得三维扫描仪便于推广使用;具体的,由于该三维扫描仪无需使用较高帧率的相机,使得三维扫描仪中所需相机的体积可以有所减小,进而令该三维扫描仪更适用于口腔内部的物体三维形貌的获取。It should be noted that the three-dimensional scanner mentioned in the embodiment of the present application is based on a spatially coded stripe extraction algorithm to obtain the three-dimensional shape of the target object. Therefore, the 3D scanner only needs one frame of 2D image at least to realize the 3D reconstruction of the target object, which greatly reduces the camera frame rate and the calculation cost of the algorithm, making the 3D scanner easy to popularize and use; specifically, because the 3D scan The instrument does not need to use a camera with a higher frame rate, so that the volume of the camera required in the three-dimensional scanner can be reduced, which in turn makes the three-dimensional scanner more suitable for acquiring the three-dimensional shape of objects inside the oral cavity.
以及,基于该三维扫描仪最低仅需一帧二维图像即可实现目标对象的三维重建的技术特性,极大地缩短了重建图和纹理图之间的获取时差,降低了对目标对象进行三维重建进行投影、拍摄所需时长,同样,也令该三维扫描仪更适用于口腔内部的物体三维形貌的获取(便于该三维扫描仪进行手持扫描)。And, based on the technical characteristics that the 3D scanner only needs one frame of 2D image to realize the 3D reconstruction of the target object, it greatly shortens the acquisition time difference between the reconstruction map and the texture map, and reduces the 3D reconstruction of the target object. The time required for projection and shooting also makes the 3D scanner more suitable for acquiring the 3D shape of objects inside the oral cavity (it is convenient for the 3D scanner to perform hand-held scanning).
此外,由于本申请实施例所提供的三维扫描仪是利用颜色作为空间编码的信息,因此,还实现了编码信息易于识别和提升识别准确性的技术效果。In addition, since the three-dimensional scanner provided by the embodiment of the present application uses color as spatially coded information, it also achieves the technical effects of easy recognition of coded information and improvement of recognition accuracy.
此外,由于本申请实施例所提及的三维扫描仪是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的,还实现了取消动态投影的投影需求的技术效果。In addition, since the 3D scanner mentioned in the embodiment of the present application is based on the spatially coded stripe extraction algorithm to obtain the 3D shape of the target object, the technical effect of canceling the projection requirement of dynamic projection is also achieved.
附图说明Description of drawings
构成本申请的一部分的附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:The drawings constituting a part of the application are used to provide further understanding of the application, and the schematic embodiments and descriptions of the application are used to explain the application, and do not constitute an improper limitation to the application. In the attached picture:
图1是根据本申请实施例提供的一种可选的三维扫描仪的示意图一;Fig. 1 is a schematic diagram 1 of an optional three-dimensional scanner provided according to an embodiment of the present application;
图2是根据本申请实施例提供的一种红绿蓝三色在物体上的扩散度及对比度的示意图;Fig. 2 is a schematic diagram of the diffusion and contrast of a red, green and blue color on an object according to an embodiment of the present application;
图3是根据本申请实施例提供的一种照明件和反光镜之间的位置关系的示意图;Fig. 3 is a schematic diagram of the positional relationship between a lighting element and a reflector according to an embodiment of the present application;
图4是根据本申请实施例提供的一种光束处理装置中的光束路径的示意图;4 is a schematic diagram of a beam path in a beam processing device provided according to an embodiment of the present application;
图5是根据本申请实施例提供的一种可选的三维扫描仪的示意图二;Fig. 5 is a second schematic diagram of an optional three-dimensional scanner provided according to an embodiment of the present application;
图6是根据本申请实施例提供的一种可选的三维扫描仪的示意图三;FIG. 6 is a third schematic diagram of an optional three-dimensional scanner provided according to an embodiment of the present application;
图7是根据本申请实施例提供的一种可选的三维扫描方法的流程图一;以及Fig. 7 is a flow chart 1 of an optional three-dimensional scanning method provided according to an embodiment of the present application; and
图8是根据本申请实施例提供的一种可选的三维扫描方法的流程图二。FIG. 8 is a second flow chart of an optional three-dimensional scanning method provided according to an embodiment of the present application.
其中,上述附图包括以下附图标记:Wherein, the above-mentioned accompanying drawings include the following reference signs:
10、投影装置;20、图像采集装置;30、照明件;40、反光镜;11、光源发射器;12、彩色光栅片;13、第一成像镜头;14、光束耦合系统;15、光棒;16、相位调制元件;17、驱动电机;21、相机;22、半反半透棱镜;23、滤光片;24、直角两通道分色棱镜;25、三通道分色棱镜;26、第二成像镜头;111、DLP发射器;112、激光发射器;211、第一相机;212、第二相机;213、第三相机;214、第四相机;215、第五相机;216、第六相机;217、第七相机。10. Projection device; 20. Image acquisition device; 30. Lighting parts; 40. Mirror; 11. Light source emitter; 12. Color grating film; 13. First imaging lens; 14. Beam coupling system; 15. Light bar ; 16, phase modulation element; 17, drive motor; 21, camera; 22, semi-reflective prism; 23, optical filter; 24, right-angle two-channel dichroic prism; 25, three-channel dichroic prism; 2 imaging lens; 111, DLP emitter; 112, laser emitter; 211, first camera; 212, second camera; 213, third camera; 214, fourth camera; 215, fifth camera; 216, sixth Camera; 217. The seventh camera.
具体实施方式Detailed ways
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be described in detail below with reference to the accompanying drawings and embodiments.
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。In order to enable those skilled in the art to better understand the solution of the present application, the technical solution in the embodiment of the application will be clearly and completely described below in conjunction with the accompanying drawings in the embodiment of the application. Obviously, the described embodiment is only It is an embodiment of a part of the application, but not all of the embodiments. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the scope of protection of this application.
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。It should be noted that the terms "first" and "second" in the description and claims of the present application and the above drawings are used to distinguish similar objects, but not necessarily used to describe a specific sequence or sequence. It should be understood that the data so used may be interchanged under appropriate circumstances for the embodiments of the application described herein. Furthermore, the terms "comprising" and "having", as well as any variations thereof, are intended to cover a non-exclusive inclusion, for example, a process, method, system, product or device comprising a sequence of steps or elements is not necessarily limited to the expressly listed instead, may include other steps or elements not explicitly listed or inherent to the process, method, product or apparatus.
根据本申请的实施例,提供了一种三维扫描仪。According to an embodiment of the present application, a three-dimensional scanner is provided.
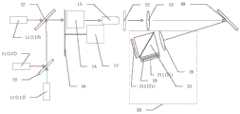
图1是根据本申请实施例的三维扫描仪的示意图。如图1所示,该三维扫描仪包括以下部件:Fig. 1 is a schematic diagram of a three-dimensional scanner according to an embodiment of the present application. As shown in Figure 1, the 3D scanner includes the following components:
投影装置10,用于投射光线至目标对象上,其中,光线包括以彩色编码条纹形式投射的预设光线,其中,彩色编码条纹至少由两种颜色条纹编码组成;也即,至少两种颜色条纹进行编码排序以组合成彩色编码条纹。The
需要说明的是:上述彩色编码条纹可以由多种纯色条纹编码组成,也可以由多种非纯色条纹编码组成;但是,为了对各个颜色条纹进行区分处理,优选由多种纯色条纹编码组成的彩色编码条纹,例如,红、绿、蓝、青、品红和黄色,具体的,彩色编码条纹中的各个颜色条纹的R、G、B分量优选为0或255,并且最多只有两个分量会同时为255。It should be noted that the above-mentioned color-coded stripes can be composed of multiple solid-color stripe codes, or can be composed of multiple non-solid-color stripe codes; Coded stripes, for example, red, green, blue, cyan, magenta, and yellow. Specifically, the R, G, and B components of each color stripe in the color coded stripes are preferably 0 or 255, and at most only two components will be simultaneously for 255.
还需要说明的是:由于不同颜色在牙齿表面具有不同的扩散、透光性能,因此,为了获取优质的条纹图案(各个条纹之间更加均匀,且各个条纹之间的对比度也更为均匀),在本申请中彩色编码条纹中的各个条纹宽度分别设置为不同值,以调整红绿蓝三色在目标对象上的扩散性能,减少各个颜色条纹之间的相互干扰,提高各个颜色条纹的提取精度。It should also be noted that since different colors have different diffusion and light transmission properties on the tooth surface, in order to obtain high-quality stripe patterns (more uniform between stripes and more uniform contrast between stripes), In this application, the width of each stripe in the color-coded stripes is set to different values to adjust the diffusion performance of red, green and blue on the target object, reduce the mutual interference between each color stripe, and improve the extraction accuracy of each color stripe .
具体如图2所示,RGB三色在物体上的扩散及对比度均不同,此时,通过调整各颜色条纹的宽度,以实现RGB三色拥有均匀的扩散性能,以及平均的各个颜色条纹对比度,进而提高条纹提取精度。Specifically, as shown in Figure 2, the diffusion and contrast of the RGB three colors on the object are different. At this time, by adjusting the width of each color stripe, the RGB three colors have uniform diffusion performance and the average contrast of each color stripe. Then the accuracy of fringe extraction is improved.
可选的,上述投影装置10可以采用透射投影的方式。Optionally, the above-mentioned
具体的,通过光源发射器11发射至少两个不同波段的光线后,对至少两个不同波段的光线进行准直会聚处理后,令光线透过MASK图案,并通过第一成像镜头13将图案投射至目标对象上。Specifically, after the light of at least two different wavelength bands is emitted by the
也即,上述投影装置10包括:光源发射器11、彩色光栅片12和第一成像镜头13,其中,光源发射器11用于发射至少两个不同波段的光线,彩色光栅片12和第一成像镜头13设置于光线的传输路径上,且光线透过彩色光栅片12上的MASK图案,并通过第一成像镜头13将图案投射至目标对象上,其中,彩色光栅片12上的MASK图案所包含的颜色种类与其所透射的光线所包含的波段种类一一对应。That is, the above-mentioned
在一个可选的示例中,上述光源发射器11可以为DLP发射器111,也可以为激光发射器112,其中,激光发射器112所发射的激光具备以下特点:定向发光、亮度极高、颜色极纯、相干性好。In an optional example, the above-mentioned
以激光发射器112为例,需要说明的是:激光光线易存在口径和发散角不适宜,以及光场强调不均匀的情况。因此,本申请实施例所提供的投影装置10通过光束耦合系统14和光棒15对光线进行处理,以调整激光光线的口径和发散角,输出强度均匀的光场。Taking the
其中,针对激光光线的口径和发散角均较小的情况而言,光束耦合系统14可以由一准直系统和一会聚透镜组成,或与其有等效功能的光学系统组成。针对激光光线的发散角均较大的情况而言,光束耦合系统14可以由三片或四片或更多的透镜元件组成一个较为复杂的会聚系统。Wherein, for the case where both the aperture and the divergence angle of the laser light are small, the
其中,光棒15可以为细长型六面体棱镜、柱体棱镜或椎体棱镜;光棒15的出射端面与入射端面平行,且出射端面与入射端面可以为长方形或正方形;光棒15可以为光线在固体透明介质内部传输的实心棒,或光线在四个固体界面围成的空间中多次反射的空心棒;实心棒的出射端面与入射端面镀增透膜,表面镀反射膜或不镀膜;空心棒在内表面镀增反膜。具体的,光线会在光棒15内表面进行多次反射混光,进而输出强度均匀的光场。Wherein, the
也即,上述投影装置10还包括:光束耦合系统14和光棒15,其中,光束耦合系统14和光棒15设置于光线的传输路径上,且,经光源发射器11发射出的至少两个不同波段的光线,分别经过光束耦合系统14和光棒15,投射至彩色光栅片12上。That is, the above-mentioned
以激光发射器112为例,需要说明的是:由于激光本身的相干性,会导致投影图案出现衍射斑。因此,本申请实施例所提供的投影装置10在采用激光光源发射器11的情况下,该投影装置10还包括:相位调制元件16和驱动电机17。具体的,如图2所示,位相调制元件设置于激光光线的传输路径上,其中,光源发射器11发射出的至少两个不同波段的激光光线后,位于激光光线的传输路径上的位相调制元件对激光光线进行位相实时调制,此外,该位相调制元件由驱动电机17驱动,以一定的速度绕旋转轴转动。Taking the
其中,位相调制元件可以为一透明光学材料薄板、微光学元件或随机位相板。Wherein, the phase modulation element can be a thin plate of transparent optical material, a micro-optical element or a random phase plate.
其中,位相调制元件可以位于光束耦合系统14之前,也可以位于光束耦合系统14之后。Wherein, the phase modulation element can be located before the
以图1为例,针对上述投影装置10所可能包含的多个部件进行举例说明:投影装置10包括:三个激光发射器112、两个半反半透分光镜、相位调制元件16(以及与相位调制元件16相连接的驱动电机17)、光束耦合系统14、光棒15、彩色光栅片12、以及第一成像镜头13。Taking FIG. 1 as an example, the multiple components that may be included in the above-mentioned
其中,投影装置10通过三个激光发射器112发射激光光束,例如,一个激光发射器发射红色激光光束,一个激光发射器绿色激光光束,一个激光发射器发射蓝色激光光束;该激光光束分别通过两个半反半透分光镜以实现光束会聚的技术效果;会聚后激光光束透射旋转的相位调制元件16,以避免由于激光本身的相干性导致投影图案出现衍射斑的情况发生;进一步的,令激光光束分别穿过光束耦合系统14和光棒15,以调整激光光线的口径和发散角,并输出强度均匀的光场;最后,令激光光束透射彩色光栅片12,生成以彩色编码条纹形式投射的预设光线,透过第一成像镜头13投射至目标对象上。当然,投影装置10也可仅设置两个激光发射器112,只需确保可发射至少两种颜色的激光光束用于形成彩色条纹即可。Wherein, the
此外,三维扫描仪还可以包括:反光镜40,其中,反光镜40用于改变光线的传输路径,在本实施例中既可用于反射投影装置10生成的预设光线,以改变预设光线的传输路径,预设光线经反光镜40反射至目标对象,经目标对象反射至图像采集装置20,减少对投影装置10及图像采集装置20的安装的约束,降低使用投影装置10及图像采集装置20所需要的空间的大小。举例说明:投影装置10向目标对象投射预设光线所需要的空间大小为:投影装置10自身的空间大小,和预设光线投射至目标对象上的路径长度所对应的空间大小,若投影装置10应用于口腔内部,且投影装置10不包含反光镜40,则上述所需的两个空间为直线设置,会为投影装置10的使用带来许多不便;若投影装置10应用于口腔内部,且投影装置10包含反光镜40,则上述所需的两个空间为折叠设置,此时,投影装置10能够较优的利用口腔内部空间,实现良好投影效果。In addition, the three-dimensional scanner may also include: a
可选的,上述投影装置10可以采用DLP投影仪。Optionally, the above-mentioned
具体的,DLP投影仪是采用DLP投影技术(数字光处理投影技术,Digital LightProcession的简写),并使用数字微镜设备(DMD,Digital Micromirror Device的简写)作为主要关键处理元件,以实现数字光学处理过程的。需要说明的是:本申请通过采用DLP投影仪作为投影装置10,实现了获取高对比度的图像并保持画面色彩艳丽的技术效果。Specifically, the DLP projector adopts DLP projection technology (digital light processing projection technology, abbreviation of Digital LightProcession), and uses a digital micromirror device (DMD, abbreviation of Digital Micromirror Device) as the main key processing element to realize digital optical processing process. It should be noted that: the present application uses a DLP projector as the
在一个可选的示例中,本申请实施例所提供的投影模块的像元尺寸为7微米-8微米。具体的,针对将本申请实施例提供的三维扫描仪应用至牙齿三维扫描领域的情况下,投影装置10中的数字微镜设备最多可内置2048X1152阵列,而数字微镜设备将预设光线投影到单颗牙齿上(约15mm)时,可以获取单个像元尺寸约7.3um的彩色编码条纹。需要说明的是:较小的像元尺寸可减少牙齿上相邻条纹图像之间的干扰。In an optional example, the pixel size of the projection module provided in the embodiment of the present application is 7 microns-8 microns. Specifically, in the case of applying the three-dimensional scanner provided by the embodiment of the present application to the field of three-dimensional scanning of teeth, the digital micromirror device in the
举例说明:本申请实施例提供的投影装置10可采用DLP LightCrafter,具体的,DLP LightCrafter的光学引擎可以为由扬明光学公司专门为DLP3000 DMD开发的RGB LED光源引擎,其中,DLP3000 DMD安装在光源引擎的末端,0.3WVGA芯片组的DLP3000 DMD由415,872个微镜组成,微镜间距7.6μm,构成608x684的微镜矩阵,最大能产生WVGA(854x480)分辨率图像。For example: the
图像采集装置20,用于采集经目标对象反射的光线,在本实施例中,用于在目标对象被投影装置10投射光线的情况下,采集经目标对象调制的光线,以获取至少一个条纹图像,其中,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建,还用于在目标对象被照明件30照射的情况下,采集经目标对象反射的照明光。The
需要说明的是:由于目标对象被投影装置10投射光线,因此,所投射的光线中包含的预设光线也投射至目标对象上;此时,预设光线以彩色编码条纹的形式投射至目标对象上,目标对象上也映射出彩色编码条纹;进而,图像采集装置20采集目标对象上映射的彩色编码条纹,以得到至少一个条纹图像。It should be noted that: since the target object is projected by the
也即,目标对象调制的光线为:目标对象以自身形状调制预设光线,使得预设光线所对应的彩色编码条纹基于目标对象的自身形状发生相应变化,此时,图像采集装置20采集发生变化后的彩色编码条纹以生成至少一个条纹图像。That is to say, the light modulated by the target object is: the target object modulates the preset light with its own shape, so that the color-coded stripes corresponding to the preset light change accordingly based on the shape of the target object. color-coded fringes to generate at least one fringe image.
优选的,图像采集装置20同步获取至少两个条纹图像,上述至少两个条纹图像均对应同一调制的彩色编码条纹。具体地,投影装置10投射一彩色编码条纹至目标对象,彩色编码条纹经目标对象调制后被图像采集装置20同步采集,图像采集装置20实时生成至少两个条纹图像。Preferably, the
本申请实施例提供的三维扫描仪,通过投影装置10投射光线至目标对象上,其中,光线包括以彩色编码条纹形式投射的预设光线,且该彩色编码条纹至少由两种颜色的编码条纹组成;图像采集装置20在目标对象被投影装置10投射光线的情况下,采集经目标对象调制的光线,以获取至少一个条纹图像,其中,图像采集装置20的感光波段与彩色编码条纹所包含的条纹颜色对应,图像采集装置能够获取到彩色编码条纹中的至少两种颜色的编码条纹,一般,投影装置与图像采集装置配套设置,投影装置的预设光线所包含的颜色均可被图像采集装置采集,而所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建。进而解决了相关技术中,现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题。The three-dimensional scanner provided in the embodiment of the present application projects light onto the target object through the
需要说明的是:由于本申请实施例所提及的三维扫描仪是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的。因此,该三维扫描仪最低仅需一帧二维图像即可实现目标对象的三维重建,大大降低了相机21帧率和算法的运算成本,使得三维扫描仪便于推广使用;具体的,由于该三维扫描仪无需使用较高帧率的相机21,使得三维扫描仪中所需相机21的体积可以有所减小,进而令该三维扫描仪更适用于口腔内部的物体三维形貌的获取。It should be noted that the three-dimensional scanner mentioned in the embodiment of the present application is based on a spatially coded stripe extraction algorithm to obtain the three-dimensional shape of the target object. Therefore, the 3D scanner only needs one frame of 2D image at least to realize the 3D reconstruction of the target object, which greatly reduces the
以及,基于该三维扫描仪最低仅需一帧二维图像即可实现目标对象的三维重建的技术特性,极大地缩短了重建图和纹理图之间的获取时差,降低了对目标对象进行三维重建进行投影、拍摄所需时长,同样,也令该三维扫描仪更适用于口腔内部的物体三维形貌的获取(便于该三维扫描仪进行手持扫描)。And, based on the technical characteristics that the 3D scanner only needs one frame of 2D image to realize the 3D reconstruction of the target object, it greatly shortens the acquisition time difference between the reconstruction map and the texture map, and reduces the 3D reconstruction of the target object. The time required for projection and shooting also makes the 3D scanner more suitable for acquiring the 3D shape of objects inside the oral cavity (it is convenient for the 3D scanner to perform hand-held scanning).
此外,由于本申请实施例所提供的三维扫描仪是利用颜色作为空间编码的信息,因此,还实现了编码信息易于识别和提升识别准确性的技术效果。In addition, since the three-dimensional scanner provided by the embodiment of the present application uses color as spatially coded information, it also achieves the technical effects of easy recognition of coded information and improvement of recognition accuracy.
此外,由于本申请实施例所提及的三维扫描仪是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的,还实现了取消动态投影的投影需求的技术效果。In addition, since the 3D scanner mentioned in the embodiment of the present application is based on the spatially coded stripe extraction algorithm to obtain the 3D shape of the target object, the technical effect of canceling the projection requirement of dynamic projection is also achieved.
可选的,在本申请实施例提供的三维扫描仪中,图像采集装置20还包括多个相机21,多个相机21中至少包含一个黑白相机,其中,图像采集装置20通过多个相机21对经目标对象调制的光线进行处理,得到多个条纹图像,其中,至少一个黑白相机所得到的条纹图像作为重建图以对目标对象进行三维重建;以及,至少多个黑白相机所得到的条纹图像作为编码图以确定个各条纹序列,和/或,至少一个彩色相机所得到的条纹图像作为编码图以确定个各条纹序列。Optionally, in the three-dimensional scanner provided in the embodiment of the present application, the
需要说明的是:作为编码图的至少一个条纹图像中所包含的条纹信息,需要能确定各个条纹的编码序列;也即,编码图由能确定各个条纹的编码序列的条纹图像组成。It should be noted that: as the fringe information contained in at least one fringe image of the coding map, the coding sequence of each stripe needs to be determined; that is, the coding map is composed of fringe images that can determine the coding sequence of each fringe.
也即,通过投影装置10将预先设计好的彩色编码条纹图像投影至目标对象上(例如:牙齿或牙龈),同时控制图像采集装置20快速采集带有投影图案的目标对象的图像,其中,图像采集装置20中包含的相机21分别采集到不同的条纹图像,例如:相机A为彩色相机,获取到彩色条纹图像,相机B为黑白相机,获取到黑白条纹图像。此时,将彩色条纹图像和黑白条纹图像传输至电脑端,电脑端以彩色条纹图像作为编码信息,以黑白条纹图像作为重建图,以获取目标对象的三维形貌。That is, the pre-designed color-coded fringe image is projected onto the target object (for example: teeth or gums) through the
需要说明的是:由于黑白相机的成像分辨率高于彩色相机,因此,若图像采集装置20仅仅通过一个彩色相机获取条纹图像,会导致分辨率较低的情况发生。为了避免分辨率较低导致三维重建困难的情况发生,因此,在上述实施例中,令图像采集装置20包括多个相机21,且多个相机21中至少包含一个黑白相机,并以成像分辨率较高的黑白条纹图像作为重建图,以获取目标对象的三维形貌。以图像采集装置20所包含的相机21可以为CCD相机为例进行说明:假设预设光线所对应的彩色编码条纹由两种颜色条纹编码组成(如:红蓝),此时,图像采集装置20通过不同CCD相机获取不同条纹图像,例如,彩色CCD相机获取到包含红蓝两种颜色的条纹图像,黑白CCD相机获取到包含蓝色一种颜色的条纹图像(黑白CCD相机前设有蓝色滤光片),此时,采用彩色CCD相机获取的条纹图像去识别和匹配各个蓝色条纹的序列编码,再依据得到的序列编码和黑白CCD相机获取的条纹图像,进行三维重建算法和拼接融合算法,以构建目标对象的三维形貌。需要说明的是:CCD相机具有体积小、重量轻、不受磁场影响、以及具有抗震动和抗撞击的特性,因此,在三维扫描仪采用2CCD相机获取条纹图像的情况下,该三维扫描仪的体积也能相应减少,使得该三维扫描仪便于手持使用,以及应用于空间较小的待扫描环境(例如:口腔)。It should be noted that: since the imaging resolution of the black-and-white camera is higher than that of the color camera, if the
需要说明的是:黑白CCD相机前设有指定颜色的滤光片23为可选方案,本申请实施例对此并不做具体限定。但是,若在黑白CCD相机前设有指定颜色的滤光片23,则可令黑白CCD相机获取到指定颜色的条纹图像,此时,仅包含指定颜色的条纹图像会更利于后续进行三维重建算法和拼接融合算法,构建目标对象的三维形貌。It should be noted that it is optional to have a
需要说明的是:本申请对相机形式不作具体限定,技术人员可以依据技术需求做相应替换,例如,该相机可以为CCD相机,也可以为CMOS相机。It should be noted that this application does not specifically limit the form of the camera, and technicians can make corresponding replacements according to technical requirements. For example, the camera can be a CCD camera or a CMOS camera.
可选的,在本申请实施例提供的三维扫描仪中,该三维扫描中包含的图像采集装置20配置的感光波段至少包含:多个指定波段,且该多个指定波段与所述彩色编码条纹包含的条纹颜色相对应。也即,在一个可选的示例中,图像采集装置20中设置有彩色相机,该彩色相机能够采集到预设光线对应的彩色编码条纹中多个条纹颜色,以便确定各条纹序列。本申请中所述的指定波段可以是指定的一个波段,也可以是指定的多个波段。Optionally, in the three-dimensional scanner provided in the embodiment of the present application, the photosensitive wavelength bands configured in the
此外,如图3所示,三维扫描仪还可以包括照明件30,照明件30用于照射目标对象,以便后续采集目标对象的纹理图,照明件30优选为白光LED灯,以实现真彩扫描,即获取到与目标对象颜色一致或颜色基本一致的三维模型。照明件30可以设置于反光镜40外周;也可以设置在扫描仪的其他部位,与反光镜40配合设置,通过反光镜40将照明光反射到目标对象,例如,令该照明件30位于第一成像镜头13的靠近光源发射器11的一侧,使其与光源发射器11所投射的光线均可通过第一成像镜头13,通过反光镜40反射到目标对象。具体的,三维扫描仪包括握持部和设置于握持部前端的入口部,投影装置10和图像采集装置20均安装于握持部,反光镜40安装于入口部,照明件30可安装于入口部,也可安装于握持部。In addition, as shown in Figure 3, the three-dimensional scanner can also include an illuminating
需要说明的是,图像采集装置20可识别确定红光、绿光和蓝光,这样图像采集装置20可采集到基于照明光下目标对象的纹理图。It should be noted that the
可选的,在本申请实施例提供的三维扫描仪中,该三维扫描仪还可以包括:时序控制电路,其中,该时序控制电路与投影装置10、照明件30和图像采集装置20相连接,时序控制电路用于控制投影装置10投射光线至目标对象上,并同步控制图像采集装置20获取多个条纹图像,时序控制电路用于控制照明件30照射目标对象,并同步控制图像采集装置20获取纹理图,优选地,时序控制电路用于控制投影装置10与照明件30交替投射光线至目标对象上。Optionally, in the 3D scanner provided in the embodiment of the present application, the 3D scanner may further include: a timing control circuit, wherein the timing control circuit is connected to the
可选的,在本申请实施例提供的三维扫描仪中,图像采集装置20还包括光束处理装置,光束处理装置包含进光部和至少两个出光部,其中,各个相机21分别对应不同的出光部设置,图像采集装置20通过光束处理装置以采集经目标对象调制的光线。Optionally, in the three-dimensional scanner provided in the embodiment of the present application, the
也即,图像采集装置20通过设置光束处理装置,使得多个相机21所分别获取条纹图案具有完全一致的视场和角度;也即,多个相机21可以接收到从同一个第二成像镜头26射入的同轴光,该同轴光分别投射至上述多个相机21。具体的,如图4所示,目标对象的影像光线通过光束处理装置的进光部射入;此时,光束处理装置将目标对象的影像光线进行分光处理,令该影像光线分别从至少两个出光部射出,以投射至多个相机21;此时,多个相机21所采集到的条纹图像,均是以同一视角获取的、并基于同一调制的彩色编码条纹获取的条纹图像,各个条纹图像中的条纹序列基于同一调制的彩色编码条纹具有关联性,进而便于后续算法对该条纹图像进行三维重建。That is to say, by setting the beam processing device in the
在一个可选的示例中,光束处理装置还包含至少一个第一光束分离单元,该第一光束分离单元用于对从进光部投射进的光线进行分光处理,以便光线分别从至少两个出光部投射至出光部对应设置的相机21,具体地,第一光束分离单元将各颜色的光分离成朝两个方向的光,例如,一束红蓝光线经第一光束分离单元处理后,形成两束红蓝光线,两束红蓝光线分别朝不同的方向射出。In an optional example, the beam processing device further includes at least one first beam splitting unit, and the first beam splitting unit is used for splitting the light projected from the light entering part, so that the light is respectively emitted from at least two Partially projected to the
也即,该光束处理装置内设有至少一个第一光束分离单元,该第一光束分离单元用于对从进光部投射进的光线进行分光处理,进而使得目标对象的影像光线能够分别从至少两个出光部投射出去,使得至少两个出光部所对应设置的相机21均能获取到同一视角的条纹图像。That is, the beam processing device is provided with at least one first beam splitting unit, and the first beam splitting unit is used to perform spectroscopic processing on the light projected from the light entrance part, so that the image light of the target object can be separated from at least The two light-emitting parts are projected out, so that the
在另一个可选的示例中,光束处理装置还包含至少一个第二光束分离单元,第二光束分离单元用于对指定相机将获取的光线进行分离处理,以便各相机获取到包含指定波段的光线,具体地,第二光束分离单元从光线中分离出部分波段的光线,该部分波段的光线朝一个方向射出,或者,第二光束分离单元从光线中分离出两部分波段的光线,两部分指定波段的光线分别从不同的方向射出,例如,一束红蓝光线经第二光束分离单元处理后,形成一束蓝光线朝一个方向射出,或,一束红蓝光线经第二光束分离单元处理后,形成一束红光线和一束蓝光线,红光线和蓝光线分别朝不同的方向射出。其中,彩色编码条纹中包含指定波段所对应的颜色的条纹。In another optional example, the beam processing device further includes at least one second beam splitting unit, and the second beam splitting unit is used to separate and process the light to be acquired by the specified camera, so that each camera can acquire the light containing the specified wavelength band , specifically, the second beam splitting unit separates light of a part of the wavelength band from the light, and the light of this part of the wave band is emitted in one direction, or, the second beam splitting unit separates the light of two parts of the wave band from the light, and the two parts specify The light rays of the wavelength bands are emitted from different directions, for example, a bundle of red and blue rays is processed by the second beam splitting unit to form a bundle of blue rays and emitted in one direction, or a bundle of red and blue rays is processed by the second beam splitting unit Finally, a bunch of red rays and a bunch of blue rays are formed, and the red rays and the blue rays are emitted in different directions respectively. Wherein, the color-coded stripes include stripes of colors corresponding to the specified bands.
也即,该光束处理装置内设有至少一个第二光束分离单元,该第二光束分离单元用于对投射至该第二光束分离单元的光线进行分离处理,使得投射光线中的部分波段的光线穿过该第二光束分离单元,而另一部分波段的光线从第二光束分离单元的表面进行反射出(或,使得另一部分波段的光线被第二光束分离单元吸收),进而令指定相机获取到包含指定波段的光线。That is to say, the beam processing device is provided with at least one second beam splitting unit, and the second beam splitting unit is used to separate and process the light projected to the second beam splitting unit, so that part of the waveband light in the projected light After passing through the second beam splitting unit, another part of the light of the wavelength band is reflected from the surface of the second beam splitting unit (or, so that the light of another part of the wavelength band is absorbed by the second beam splitting unit), and then the specified camera acquires Contains rays of the specified band.
需要说明的是:所述指定相机为所述黑白相机。It should be noted that: the specified camera is the black and white camera.
可选的,在本申请实施例提供的三维扫描仪中,该三维扫描仪还可以包括:散热系统、加热防雾系统、软件算法系统等。Optionally, in the 3D scanner provided in the embodiment of the present application, the 3D scanner may further include: a cooling system, a heating anti-fog system, a software algorithm system, and the like.
其中,散热系统用于防止三维扫描仪装置内部过热,导致扫描仪损坏的情况发生。Wherein, the heat dissipation system is used to prevent the internal overheating of the three-dimensional scanner device from causing damage to the scanner.
其中,加热防雾系统用于防止三维扫描仪中各个光学仪器发生雾面现象,导致无法获取到精准的条纹图像的情况下发生。Among them, the heating anti-fog system is used to prevent the fogging phenomenon of each optical instrument in the 3D scanner, resulting in the failure to obtain accurate fringe images.
其中,软件算法系统用于依据图像采集装置20所获取的至少一个条纹图像,对目标对象进行三维重建。Wherein, the software algorithm system is used to perform three-dimensional reconstruction of the target object according to at least one fringe image acquired by the
为了使得本领域技术人员能够更加清楚地了解本申请的技术方案,以下将结合具体的实施例来说明。In order to enable those skilled in the art to understand the technical solutions of the present application more clearly, the following will be described in conjunction with specific embodiments.
实施例一:Embodiment one:
以图1为例,光束处理装置包括半反半透棱镜22,且所述半反半透棱镜22包含第一出光部和第二出光部,其中,所述光束处理装置通过所述半反半透棱镜22对光线进行透射和反射,而实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第一出光部和第二出光部投射至各自出光部对应设置的相机21,相对应的,图像采集装置20还包括与第一出光部对应设置的第一相机211,以及与第二出光部对应设置的第二相机212,第一相机211基于采集到的光线生成第一条纹图像,第二相机212基于采集到的光线生成第二条纹图像,第一条纹图像与第二条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别。Taking Fig. 1 as an example, the beam processing device includes a half-
此外,光束处理装置还包括滤光片23,所述光束处理装置通过所述滤光片23对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含第五滤光波段的光线,其中,所述多个相机至少有一个相机为指定相机。In addition, the light beam processing device also includes a
具体的,滤光片23设置于第一出光部和第一相机211之间,以使第一相机211获取到第五滤光波段的光线,和/或,设置于第二出光部和第二相机212之间,以使第二相机212获取到第五滤光波段的光线。Specifically, the
需要说明的是:以滤光片23设置于第一出光部和第一相机211之间,以使第一相机211获取到第五滤光波段的光线为例进行说明:第一条纹图像所包含的两种颜色的条纹分别为黑色条纹和白色条纹,其中,该白色条纹在彩色编码条纹中,对应的条纹颜色为滤光片23所对应的滤光颜色。It should be noted that: take the
此时,第二条纹图像所包含的至少两种颜色的条纹至少有一条条纹颜色为滤光片23所对应的滤光颜色,以便第二条纹图像可以识别出第一条纹图像中所包含的条纹的编码序列。At this time, at least one of the fringes of at least two colors contained in the second fringe image has the color of the corresponding filter color of the
具体地,第一相机为黑白相机,第二相机为彩色相机,黑白相机与滤光片23对应设置,以投影装置10投射红绿蓝彩色编码条纹(即包含红色条纹、绿色条纹和蓝色条纹的彩色编码条纹)为例,滤光片23优选为蓝色滤光片,投影装置10投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经半反半透棱镜22分离,透射一红绿蓝彩色编码条纹并反射一红绿蓝彩色编码条纹,其中一红绿蓝彩色编码条纹通过滤光片23后其中的蓝光由黑白相机采集,黑白相机生成包含蓝色条纹的第一条纹图像,另一红绿蓝彩色编码条纹由彩色相机采集,彩色相机生成包含红色条纹、绿色条纹和蓝色条纹的第二条纹图像,第一条纹图像中的各条纹与第二条纹图像中的蓝色条纹相对应,第二条纹图像作为编码图,具体地,由于第二条纹图像由彩色相机采集,第二条纹图像中红色条纹、绿色条纹和蓝色条纹均可识别确定,由此即可确定第二条纹图像中各条纹的编码序列,第一条纹图像作为重建图,基于第一条纹图像与第二条纹图像的条纹对应关系,第一条纹图像的各条纹可通过第二条纹的编码序列识别及匹配,实现三维重建。Specifically, the first camera is a black-and-white camera, and the second camera is a color camera. The black-and-white camera is set corresponding to the
当然,也可取消黑白相机前滤光片23的设置,黑白相机获取的第一条纹图像包含红色条纹、绿色条纹和蓝色条纹,或者在黑白相机前设置双色滤光片23,供红绿蓝三种颜色光中的两种射出被黑白相机采集;也可以在彩色相机前设置滤光片23,以在彩色相机前设置红色滤光片为例,彩色相机生成包含红色条纹的第二条纹图像,第一条纹图像中的蓝色条纹与红绿蓝彩色编码条纹中的蓝色条纹相对应,第二条纹图像中的红色条纹与红绿蓝彩色编码条纹中的蓝色条纹相对应,由于黑白相机前设置的为单色滤光片23,只供一种指定的光射出,因此黑白相机采集的第一条纹图像中的条纹也可被识别确定,第一条纹图像与第二条纹图像可组合确定出各条纹的编码序列,第一条纹图像与第二条纹图像均作为编码图,第一条纹图像作为重建图;或者,在彩色相机前设置双色滤光片23,以在彩色相机前设置红绿滤光片23为例,彩色相机生成包含红色条纹和绿色条纹的第二条纹图像,第一条纹图像与第二条纹图像均作为编码图或者仅第二条纹图像作为编码图,第一条纹图像作为重建图。Certainly, also can cancel the setting of optical filter 23 before black-and-white camera, the first stripe image that black-and-white camera obtains comprises red stripe, green stripe and blue stripe, perhaps two-color filter 23 is set before black-and-white camera, for red green blue Two of the three colors of light are emitted by a black and white camera; a filter 23 can also be set in front of the color camera, for example, a red filter is set in front of the color camera, and the color camera generates a second fringe image containing red stripes , the blue stripes in the first stripe image correspond to the blue stripes in the red-green-blue color-coded stripes, and the red stripes in the second stripe image correspond to the blue stripes in the red-green-blue color-coded stripes, because black and white The monochromatic filter 23 is set in front of the camera, which only emits a specified light, so the stripes in the first stripe image collected by the black and white camera can also be identified and determined, and the first stripe image and the second stripe image can be combined Determine the coding sequence of each fringe, the first fringe image and the second fringe image are all used as a coding image, and the first fringe image is used as a reconstruction image; or, a two-color filter 23 is set in front of the color camera to set a red color filter in front of the color camera. Taking the
在部分实施例中,图像采集装置20只能识别确定红光、绿光和蓝光中的两种,对于该部分实施例,图像采集装置20不能完整获取白光下目标对象的纹理数据,对于部分实施例,图像采集装置20能够识别确定红光、绿光和蓝光,可完整获取白光下目标对象的纹理数据,实现彩色三维数据的获取。In some embodiments, the
值得强调的是:在该实施例中,光束处理装置通过所述半反半透棱镜22对光线进行透射和反射,而实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第一出光部和第二出光部投射至各自出光部对应设置的相机;也即,光束处理装置通过半反半透棱镜22实现了第一光束分离单元所对应的功能。It is worth emphasizing that: in this embodiment, the light beam processing device transmits and reflects the light through the half-
同时,还值得强调的是:在该实施例中,光束处理装置通过所述滤光片23对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线;也即,光束处理装置通过滤光片23实现了第二光束分离单元所对应的功能。At the same time, it is also worth emphasizing that: in this embodiment, the light beam processing device separates the light to be acquired by the designated camera through the
实施例二:Embodiment two:
以图5为例,光束处理装置包括直角两通道分色棱镜24,且,所述直角两通道分色棱镜24包含第三出光部和第四出光部,其中,所述光束处理装置通过所述直角两通道分色棱镜24,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第三出光部和所述第四出光部投射至各自出光部对应设置的相机21;相对应的,图像采集装置20包括与第三出光部对应设置的第三相机213,以及与第四出光部对应设置的第四相机214,第三相机213基于采集到到的光线生成第三条纹图像,第四相机214基于采集到的光线生成第四条纹图像,第三条纹图像与第四条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别;Taking Fig. 5 as an example, the light beam processing device includes a right-angle two-channel
此外,光束处理装置还通过所述直角两通道分色棱镜24,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线,其中,所述指定相机获取到包含指定波段的光线包括:所述第三相机213获取到第一滤光波段的光线,和/或,所述第四相机214获取到第二滤光波段的光线。In addition, the light beam processing device also uses the right-angle two-channel
需要说明的是:以光束处理装置通过所述直角两通道分色棱镜24,实现对第三相机213将获取的光线进行分离处理,以便所第三相机213获取到包含第一滤光波段的光线为例进行说明:第三条纹图像所包含的两种颜色的条纹分别为黑色条纹和白色条纹,其中,该白色条纹在彩色编码条纹中,对应的条纹颜色为滤光片23所对应的滤光颜色。It should be noted that: the beam processing device passes through the right-angle two-channel
此时,第四条纹图像所包含的至少两种颜色的条纹至少有一条条纹颜色为滤光片23所对应的滤光颜色,以便第四条纹图像可以识别出第三条纹图像中所包含的条纹的编码序列。At this time, the stripes of at least two colors contained in the fourth fringe image have at least one fringe color corresponding to the filter color of the
具体地,第三相机为黑白相机,第四相机为彩色相机,以投影装置10投射红绿蓝彩色编码条纹(即包含红色条纹、绿色条纹和蓝色条纹的彩色编码条纹)为例,投影装置10投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经直角两通道分色棱镜24分解,分解成一红绿编码条纹及一蓝色编码条纹,蓝色编码条纹由黑白相机采集,黑白相机生成包含蓝色条纹的第三条纹图像,红绿编码条纹由彩色相机采集,彩色相机生成包含红色条纹和绿色条纹的第四条纹图像,第三条纹图像中的蓝色条纹与第四条纹图像中的各条纹相对应,具体地,第三条纹图像与第四条纹图像组合后与红绿蓝彩色编码条纹相对应,第四条纹图像作为编码图,具体地,由于第四条纹图像由彩色相机采集,第四条纹图像中红色条纹和绿色条纹均可识别确定,由此即可确定第四条纹图像中各条纹的编码序列,第三条纹图像作为重建图,基于第三条纹图像与第四条纹图像的条纹对应关系,第三条纹图像的各条纹可通过第四条纹的编码序列识别及匹配,实现三维重建。当然,在本实施例中,黑白相机仅获取单色光,因此第三条纹图像也可识别确定,第三条纹图像可与第四条纹图像组合确定各条纹的编码序列,第三条纹图像与第四条纹图像均作为编码图。此外,本实施例可设置滤光片23,也可不设置滤光片23,滤光片23与直角两通道分色棱镜24配合设置即可。Specifically, the third camera is a black-and-white camera, and the fourth camera is a color camera. Taking the
值得强调的是:在该实施例中,光束处理装置通过所述直角两通道分色棱镜24,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第三出光部和所述第四出光部投射至各自出光部对应设置的相机21;也即,光束处理装置通过直角两通道分色棱镜24实现了第一光束分离单元所对应的功能。It is worth emphasizing that: in this embodiment, the light beam processing device realizes spectroscopic processing of the light projected from the light entrance part through the right-angle two-channel
同理,还值得强调的是:在该实施例中,光束处理装置还通过所述直角两通道分色棱镜24,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线;也即,光束处理装置通过直角两通道分色棱镜24实现了第二光束分离单元所对应的功能。Similarly, it is also worth emphasizing that in this embodiment, the light beam processing device also uses the right-angle two-channel
实施例三:Embodiment three:
以图6为例,光束处理装置包括三通道分色棱镜25,且,所述三通道分色棱镜25包含第五出光部、第六出光部和第七出光部,其中,所述光束处理装置通过所述三通道分色棱镜25,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第五出光部、所述第六出光部和所述第七出光部投射至各自出光部对应设置的相机21;Taking FIG. 6 as an example, the beam processing device includes a three-channel
相对应的,所述图像采集装置20包括与所述第五出光部对应设置的第五相机215、与第六出光部对应设置的第六相机216,以及与所述第七出光部对应设置的第七相机217,第五相机215基于采集到的光线生成第五条纹图像,第六相机216基于采集到的光线生成第六条纹图像,第七相机217基于采集到的光线生成第七条纹图像,第五条纹图像、第六条纹图像和第七条纹图像中包括至少两种颜色的条纹且至少两种颜色的条纹可识别;Correspondingly, the
其中,所述光束处理装置通过所述三通道分色棱镜25,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线,其中,所述指定相机获取到包含指定波段的光线至少包括:所述第五相机215获取到第三滤光波段的光线、所述第六相机216获取到第四滤光波段的光线,且所述第三滤光波段不同于所述第四滤光波段。Wherein, the light beam processing device separates the light to be acquired by the designated camera through the three-channel
其中,第五相机、第六相机和第七相机中至少一者为黑白相机,具体地,第五相机为黑白相机,第六相机和第七相机为彩色相机,或第五相机和第六相机为黑白相机,第七相机为彩色相机,优选地,上述第五相机215、第六相机216和第七相机217均为黑白相机。Wherein, at least one of the fifth camera, the sixth camera and the seventh camera is a black and white camera, specifically, the fifth camera is a black and white camera, the sixth camera and the seventh camera are color cameras, or the fifth camera and the sixth camera The camera is a black and white camera, and the seventh camera is a color camera. Preferably, the
需要说明的是:由于本申请的图像采集装置20的感光波段与彩色编码条纹所包含的条纹颜色一一对应,因此,在第五相机215、第六相机216和第七相机217均为黑白相机的情况下,该彩色编码条纹所包含的条纹颜色为三种,其中,至少两种条纹颜色与所述第三滤光波段、所述第四滤光波段存在对应关系。It should be noted that: since the photosensitive wavelength band of the
例如:彩色编码条纹由红色条纹、蓝色条纹和绿色条纹组成;此时,第一滤光面对应的滤光颜色可以为红色,第二滤光面对应的滤光颜色可以为蓝色;此时,所获取到的第五条纹图像为黑白条纹图像,其中,白色条纹对应彩色编码条纹中的红色条纹;所获取到的第六条纹图像为黑白条纹图像,其中,白色条纹对应彩色编码条纹中的蓝色条纹。For example: the color-coded stripes are composed of red stripes, blue stripes and green stripes; at this time, the filter color corresponding to the first filter surface can be red, and the filter color corresponding to the second filter surface can be blue ; At this time, the obtained fifth stripe image is a black and white stripe image, wherein the white stripe corresponds to the red stripe in the color coded stripe; the obtained sixth stripe image is a black and white stripe image, wherein the white stripe corresponds to the color coded stripe Blue stripes in stripes.
例如:彩色编码条纹由红色条纹、蓝色条纹和黄色条纹组成;此时,第一滤光面对应的滤光颜色可以为红色,第二滤光面对应的滤光颜色可以为绿色;此时,所获取到的第五条纹图像为黑白条纹图像,其中,白色条纹对应彩色编码条纹中的红色条纹和黄色条纹(在光学领域中,黄色光线由绿色光线和红色光线组合而成);所获取到的第六条纹图像为黑白条纹图像,其中,白色条纹对应彩色编码条纹中的黄色条纹(在光学领域中,黄色光线由绿色光线和红色光线组合而成)。For example: the color-coded stripes are composed of red stripes, blue stripes and yellow stripes; at this time, the filter color corresponding to the first filter surface can be red, and the filter color corresponding to the second filter surface can be green; At this time, the acquired fifth fringe image is a black and white fringe image, wherein the white fringe corresponds to the red fringe and the yellow fringe in the color-coded fringe (in the optical field, the yellow light is composed of green light and red light); The obtained sixth fringe image is a black and white fringe image, wherein the white fringe corresponds to the yellow fringe in the color coded fringe (in the optical field, yellow light is composed of green light and red light).
在一个可选的示例中,所述光束处理装置还通过所述三通道分色棱镜25,实现对指定相机将获取的光线进行分离处理,以便所述第七相机217获取到第六滤光波段的光线,且所述第六滤光波段不同于所述第三滤光波段和所述第四滤光波段。In an optional example, the light beam processing device also uses the three-channel
例如,彩色编码条纹由红色条纹、蓝色条纹和绿色条纹组成;此时,第一滤光面对应的滤光颜色可以为红色,第二滤光面对应的滤光颜色可以为蓝色,第三滤光面对应的滤光颜色可以为绿色;此时,所获取到的第七条纹图像为黑白条纹图像,其中,白色条纹对应彩色编码条纹中的绿色条纹。For example, the color-coded stripes are composed of red stripes, blue stripes and green stripes; at this time, the filter color corresponding to the first filter surface can be red, and the filter color corresponding to the second filter surface can be blue , the filter color corresponding to the third filter surface may be green; at this time, the acquired seventh fringe image is a black and white fringe image, wherein the white fringe corresponds to the green fringe in the color-coded fringe.
此时,第五条纹图像、第六条纹图像和第七条纹图像任意一个均可以作为重建图,以对目标对象进行三维重建。例如,第五条纹图像作为重建图,以对目标对象进行三维重建,而第五条纹图像、第六条纹图像和第七条纹图则共同作为编码图,以确定各个条纹序列。此外,优选第五条纹图像、第六条纹图像和第七条纹图像均作为重建图,At this time, any one of the fifth fringe image, the sixth fringe image, and the seventh fringe image can be used as a reconstruction map to perform three-dimensional reconstruction of the target object. For example, the fifth fringe image is used as a reconstruction image to perform three-dimensional reconstruction of the target object, and the fifth fringe image, sixth fringe image, and seventh fringe image are jointly used as a coding image to determine each fringe sequence. In addition, it is preferred that the fifth fringe image, the sixth fringe image and the seventh fringe image are all used as reconstruction images,
值得强调的是:在该实施例中,光束处理装置通过所述三通道分色棱镜25,实现对从进光部投射进的光线进行分光处理,以便所述光线分别从所述第五出光部、所述第六出光部和所述第七出光部投射至各自出光部对应设置的相机21;也即,光束处理装置通过三通道分色棱镜25实现了第一光束分离单元所对应的功能。It is worth emphasizing that: in this embodiment, the light beam processing device realizes the spectral processing of the light projected from the light entrance part through the three-channel
同理,还值得强调的是:在该实施例中,光束处理装置还通过所述三通道分色棱镜25,实现对指定相机将获取的光线进行分离处理,以便所述指定相机获取到包含指定波段的光线;也即,光束处理装置通过三通道分色棱镜25实现了第二光束分离单元所对应的功能。Similarly, it is worth emphasizing that in this embodiment, the light beam processing device also uses the three-channel
需要说明的是:本申请所列举的上述实施例一、实施例二和实施例三均为,使得本领域技术人员能够更加清楚地了解本申请的技术方案的一种举例性示意,在此对本申请并不做具体限定。若其他具体装置可以实现本申请中对光束处理装置的功能限定描述,同样也可以作为本申请的一种实行的技术方案。It should be noted that: the above-mentioned embodiment 1,
此外,还需要说明的是:本申请所列举的上述实施例一、实施例二和实施例三,均可以相互结合参考,以实现本申请中对光束处理装置的功能限定描述,例如,在实施例二和实施例三中,在光束处理装置通过直角两通道分色棱镜24或三通道分色棱镜25实现了第二光束分离单元所对应的功能之后,该光束处理装置仍可以继续通过滤光片再次实现了第二光束分离单元所对应的功能。In addition, it should be noted that the above-mentioned embodiment 1,
综上,本方案与现有技术相比,本发明的有益效果在于如下:In summary, compared with the prior art, the present invention has the beneficial effects as follows:
1、基于空间编码的条纹提取算法,实现了仅需一帧二维图像即可对目标对象进行三维重建的技术目的,达到了降低相机21帧率和算法的运算成本的技术效果;1. The stripe extraction algorithm based on spatial coding realizes the technical purpose of three-dimensional reconstruction of the target object with only one frame of two-dimensional image, and achieves the technical effect of reducing the camera's 21 frame rate and the calculation cost of the algorithm;
2、通过利用颜色作为空间编码的信息,使得编码信息易识别,进而达到了提升识别准确性的技术效果;2. By using color as spatially encoded information, the encoded information is easy to identify, thereby achieving the technical effect of improving the accuracy of identification;
3、基于本申请的三维扫描仪的技术原理,使得该三维扫描仪取消了动态投影的需求,使得该三维扫描仪也可以通过简单的透射投影方式,进行图案投影处理;进一步的,在三维扫描仪通过透射投影方式进行图案投影处理的情况下,极大地降低了硬件成本;3. Based on the technical principle of the 3D scanner of this application, the 3D scanner cancels the need for dynamic projection, so that the 3D scanner can also perform pattern projection processing through a simple transmission projection method; further, in 3D scanning When the instrument performs pattern projection processing through transmission projection, the hardware cost is greatly reduced;
4、在该三维扫描仪使用激光作为光源进行图案投影处理的情况下,可以提升该投影装置10的亮度和景深,进行实现低成本高亮度高景深的技术效果。4. In the case that the three-dimensional scanner uses laser light as a light source for pattern projection processing, the brightness and depth of field of the
也即,本申请所提供的三维扫描仪具备硬件低成本、实时帧率低要求、光学系统高亮度与大景深、以及设备小型化的优点;进而令该三维扫描仪实现了对口内牙齿和牙龈等具有反光、透射光和扩散光等特性的材质上直接进行带彩色纹理的动态实时三维扫描。That is to say, the 3D scanner provided by this application has the advantages of low cost of hardware, low requirement of real-time frame rate, high brightness and large depth of field of the optical system, and miniaturization of equipment; Dynamic real-time 3D scanning with colored textures can be performed directly on materials with characteristics such as reflection, transmission light and diffuse light.
根据本申请的实施例,提供了一种三维扫描系统。其中,该三维扫描系统包括:According to an embodiment of the present application, a three-dimensional scanning system is provided. Among them, the 3D scanning system includes:
三维扫描仪,用于投射光线至目标对象上,并在所述目标对象被投射光线的情况下,采集经所述目标对象调制的光线,以获取至少一个条纹图像,其中,所述投射的光线包括以彩色编码条纹形式投射的预设光线,其中,所述彩色编码条纹至少由两种颜色条纹编码组成;A three-dimensional scanner, configured to project light onto a target object, and when the target object is projected with light, collect light modulated by the target object to obtain at least one fringe image, wherein the projected light including predetermined light projected in the form of color-coded stripes, wherein the color-coded stripes are composed of at least two color-coded stripes;
图像处理器,与所述三维扫描仪相连接,用于获取所述三维扫描仪获取的至少一个条纹图像,并依据所述条纹图像作为编码图以确定各条纹序列,以及作为重建图以对所述目标对象进行三维重建。An image processor, connected to the 3D scanner, used to obtain at least one fringe image obtained by the 3D scanner, and use the fringe image as a coded image to determine each fringe sequence, and as a reconstruction image for all fringe images 3D reconstruction of the target object.
需要说明的是:该三维扫描系统所包括的三维扫描仪为本申请实施例所提供的上述三维扫描仪。It should be noted that: the 3D scanner included in the 3D scanning system is the above-mentioned 3D scanner provided in the embodiment of the present application.
可选的,在所述三维扫描仪通过多个相机对经所述目标对象调制的光线进行采集,以获取至少一个条纹图像,且所述多个相机中至少包含一个黑白相机的情况下,所述图像处理器还用于:将至少一个所述黑白相机所得到的条纹图像作为重建图以对所述目标对象进行三维重建;将至少多个黑白相机所得到的条纹图像作为编码图以确定个各条纹序列,和/或,将至少一个彩色相机所得到的条纹图像作为编码图以确定个各条纹序列。Optionally, when the three-dimensional scanner collects the light modulated by the target object through multiple cameras to obtain at least one fringe image, and the multiple cameras include at least one black and white camera, the The image processor is also used for: using the fringe image obtained by at least one black-and-white camera as a reconstruction image to perform three-dimensional reconstruction on the target object; using the fringe image obtained by at least a plurality of black-and-white cameras as an encoding image to determine Each fringe sequence, and/or, the fringe image obtained by at least one color camera is used as a coding image to determine each fringe sequence.
本申请实施例提供的三维扫描系统,通过三维扫描仪投射光线至目标对象上,并在所述目标对象被投射光线的情况下,采集经所述目标对象调制的光线,以获取至少一个条纹图像,其中,所述投射的光线包括以彩色编码条纹形式投射的预设光线,其中,所述彩色编码条纹至少由两种颜色条纹编码组成;图像处理器与所述三维扫描仪相连接,用于获取所述三维扫描仪获取的至少一个条纹图像,并依据所述条纹图像作为编码图以确定各条纹序列,以及作为重建图以对所述目标对象进行三维重建。进而解决了相关技术中,现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题。The three-dimensional scanning system provided in the embodiment of the present application uses a three-dimensional scanner to project light onto a target object, and when the target object is projected light, collects light modulated by the target object to obtain at least one fringe image , wherein the projected light includes preset light projected in the form of color-coded stripes, wherein the color-coded stripes are composed of at least two color-coded stripes; the image processor is connected to the three-dimensional scanner for Acquiring at least one fringe image acquired by the three-dimensional scanner, and using the fringe image as an encoding map to determine each fringe sequence, and using the fringe image as a reconstruction map to perform three-dimensional reconstruction of the target object. Furthermore, in the related art, the technical problem that the hardware cost required by the existing three-dimensional reconstruction method is relatively high, which is unfavorable for popularization and use of the three-dimensional scanning device is solved.
需要说明的是:由于本申请实施例所提及的三维扫描系统是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的。因此,该三维扫描系统最低仅需一帧二维图像即可实现目标对象的三维重建,大大降低了相机帧率和算法的运算成本,使得三维扫描系统便于推广使用;具体的,由于该三维扫描系统无需使用较高帧率的相机,使得三维扫描系统中所需相机的体积可以有所减小,进而令该三维扫描系统更适用于口腔内部的物体三维形貌的获取。It should be noted that the three-dimensional scanning system mentioned in the embodiment of the present application is based on a spatially coded stripe extraction algorithm to obtain the three-dimensional shape of the target object. Therefore, the 3D scanning system only needs one frame of 2D image at least to realize the 3D reconstruction of the target object, which greatly reduces the camera frame rate and the calculation cost of the algorithm, making the 3D scanning system easy to popularize and use; specifically, because the 3D scanning The system does not need to use a camera with a higher frame rate, so that the volume of the camera required in the three-dimensional scanning system can be reduced, which in turn makes the three-dimensional scanning system more suitable for acquiring the three-dimensional shape of objects inside the oral cavity.
以及,基于该三维扫描系统最低仅需一帧二维图像即可实现目标对象的三维重建的技术特性,极大地缩短了重建图和纹理图之间的获取时差,降低了对目标对象进行三维重建进行投影、拍摄所需时长,同样,也令该三维扫描系统更适用于口腔内部的物体三维形貌的获取(便于该三维扫描系统进行手持扫描)。And, based on the technical characteristics of the 3D scanning system that requires at least one frame of 2D image to realize the 3D reconstruction of the target object, it greatly shortens the acquisition time difference between the reconstruction map and the texture map, and reduces the need for 3D reconstruction of the target object. The time required for projection and shooting also makes the 3D scanning system more suitable for acquiring the 3D shape of objects inside the oral cavity (it is convenient for the 3D scanning system to perform hand-held scanning).
此外,由于本申请实施例所提供的三维扫描系统是利用颜色作为空间编码的信息,因此,还实现了编码信息易于识别和提升识别准确性的技术效果。In addition, since the three-dimensional scanning system provided by the embodiment of the present application uses color as spatially coded information, it also achieves the technical effects of easy recognition of coded information and improvement of recognition accuracy.
此外,由于本申请实施例所提及的三维扫描系统是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的,因此,还实现了取消动态投影的投影需求的技术效果。In addition, since the 3D scanning system mentioned in the embodiment of the present application is based on the spatially encoded fringe extraction algorithm to obtain the 3D shape of the target object, it also achieves the technical effect of canceling the projection requirement of dynamic projection.
本申请实施例还提供了一种三维扫描方法,需要说明的是,本申请实施例的三维扫描方法应用于本申请实施例所提供的上述三维扫描仪。以下对本申请实施例提供的三维扫描方法进行介绍。The embodiment of the present application also provides a three-dimensional scanning method. It should be noted that the three-dimensional scanning method in the embodiment of the present application is applied to the above-mentioned three-dimensional scanner provided in the embodiment of the present application. The three-dimensional scanning method provided in the embodiment of the present application is introduced below.
图7是根据本申请实施例的三维扫描方法的流程图。如图7所示,该三维扫描方法包括:Fig. 7 is a flowchart of a three-dimensional scanning method according to an embodiment of the present application. As shown in Figure 7, the three-dimensional scanning method includes:
步骤S701,将预设光线以彩色编码条纹的形式投射至目标对象上;Step S701, projecting preset light onto the target object in the form of color-coded stripes;
步骤S703,采集经目标对象调制的光线,并基于光线获取至少一个条纹图像,其中,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建;Step S703, collecting light modulated by the target object, and obtaining at least one fringe image based on the light, wherein the obtained fringe image is used as an encoding map to determine each fringe sequence, and as a reconstruction map to perform three-dimensional reconstruction of the target object;
步骤S705,基于编码图确定多个条纹图像中各条纹的序列;Step S705, determining the sequence of each stripe in a plurality of stripe images based on the coding map;
步骤S707,基于序列对重建图进行三维重建,获取目标对象的三维数据。Step S707, perform three-dimensional reconstruction on the reconstruction map based on the sequence, and acquire three-dimensional data of the target object.
本申请实施例提供的三维扫描方法,通过将预设光线以彩色编码条纹的形式投射至目标对象上;采集经目标对象调制的光线,并基于光线获取至少一个条纹图像,其中,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建;基于编码图确定多个条纹图像中各条纹的序列;基于序列对重建图进行三维重建,获取目标对象的三维数据。进而解决了相关技术中,现有三维重建方法所需硬件成本较高,不利于三维扫描装置的推广使用的技术问题。In the three-dimensional scanning method provided by the embodiment of the present application, the predetermined light is projected onto the target object in the form of color-coded stripes; the light modulated by the target object is collected, and at least one fringe image is obtained based on the light, wherein the obtained fringe The image is used as a coding map to determine each fringe sequence, and as a reconstruction map to perform 3D reconstruction of the target object; determine the sequence of each fringe in multiple fringe images based on the coding map; perform 3D reconstruction on the reconstruction map based on the sequence to obtain the 3D image of the target object data. Furthermore, in the related art, the technical problem that the hardware cost required by the existing three-dimensional reconstruction method is relatively high, which is unfavorable for popularization and use of the three-dimensional scanning device is solved.
需要说明的是:由于本申请实施例所提及的三维扫描方法是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的。因此,该三维扫描方法最低仅需一帧二维图像即可实现目标对象的三维重建,大大降低了相机帧率和算法的运算成本,使得三维扫描方法便于推广使用;具体的,由于该三维扫描方法无需使用较高帧率的相机,使得三维扫描方法中所需相机的体积可以有所减小,进而令该三维扫描方法更适用于口腔内部的物体三维形貌的获取。It should be noted that: the three-dimensional scanning method mentioned in the embodiment of the present application is based on a spatially coded stripe extraction algorithm to obtain the three-dimensional shape of the target object. Therefore, the 3D scanning method only needs one frame of 2D image at least to realize the 3D reconstruction of the target object, which greatly reduces the camera frame rate and the calculation cost of the algorithm, making the 3D scanning method easy to popularize and use; specifically, because the 3D scanning The method does not need to use a camera with a higher frame rate, so that the volume of the camera required in the three-dimensional scanning method can be reduced, thereby making the three-dimensional scanning method more suitable for acquiring the three-dimensional shape of objects inside the oral cavity.
以及,基于该三维扫描方法最低仅需一帧二维图像即可实现目标对象的三维重建的技术特性,极大地缩短了重建图和纹理图之间的获取时差,降低了对目标对象进行三维重建进行投影、拍摄所需时长,同样,也令该三维扫描方法更适用于口腔内部的物体三维形貌的获取(便于该三维扫描方法进行手持扫描)。And, based on the technical characteristics of the 3D scanning method that requires at least one frame of 2D image to achieve 3D reconstruction of the target object, it greatly shortens the acquisition time difference between the reconstruction map and the texture map, and reduces the time required for 3D reconstruction of the target object. The time required for projection and shooting also makes the three-dimensional scanning method more suitable for obtaining the three-dimensional shape of objects inside the oral cavity (it is convenient for the three-dimensional scanning method to perform hand-held scanning).
此外,由于本申请实施例所提供的三维扫描方法是利用颜色作为空间编码的信息,因此,还实现了编码信息易于识别和提升识别准确性的技术效果。In addition, since the three-dimensional scanning method provided by the embodiment of the present application uses color as spatially coded information, it also achieves the technical effects of easy recognition of coded information and improvement of recognition accuracy.
此外,由于本申请实施例所提及的三维扫描方法是基于空间编码的条纹提取算法,以获取目标对象的三维形貌的,因此,还实现了取消动态投影的投影需求的技术效果。In addition, since the three-dimensional scanning method mentioned in the embodiment of the present application is based on the spatially encoded fringe extraction algorithm to obtain the three-dimensional shape of the target object, it also achieves the technical effect of canceling the projection requirement of dynamic projection.
可选地,在本申请实施例提供的三维扫描方法中,三维扫描方法还包括:获取所述目标对象的纹理数据;基于所述目标对象的三维数据及纹理数据,获取所述目标对象的彩色三维数据。Optionally, in the three-dimensional scanning method provided in the embodiment of the present application, the three-dimensional scanning method further includes: acquiring texture data of the target object; and acquiring color information of the target object based on the three-dimensional data and texture data of the target object 3D data.
可选地,在本申请实施例提供的三维扫描方法中,三维扫描方法还包括:将照明光投射至目标对象上并基于所述照明光获取所述目标对象的纹理数据;基于所述目标对象的三维数据及纹理数据,获取所述目标对象的彩色三维数据。Optionally, in the three-dimensional scanning method provided in the embodiment of the present application, the three-dimensional scanning method further includes: projecting illumination light onto the target object and acquiring texture data of the target object based on the illumination light; The three-dimensional data and texture data of the target object are obtained to obtain the color three-dimensional data of the target object.
纹理数据通过单个相机获取,或通过多个相机获取的数据合成。Texture data is acquired by a single camera, or synthesized from data acquired by multiple cameras.
具体地,步骤S703,采集经目标对象调制的光线,并基于同一光线获取至少两个条纹图像,其中,至少一个条纹图像通过黑白相机获取,所获取的条纹图像作为编码图以确定各条纹序列,以及作为重建图以对目标对象进行三维重建,优选地,黑白相机获取的条纹图像作为重建图。Specifically, in step S703, the light modulated by the target object is collected, and at least two fringe images are obtained based on the same light, wherein at least one fringe image is obtained by a black-and-white camera, and the obtained fringe image is used as a coding image to determine each fringe sequence, And as the reconstructed image for three-dimensional reconstruction of the target object, preferably, the fringe image acquired by the black-and-white camera is used as the reconstructed image.
具体地,步骤S705,基于编码图确定多个条纹图像中各条纹的序列,基于编码图中各条纹的排列信息及颜色信息确定编码序列,例如,对于按红、绿、绿、红排列的四条条纹,如通过红色(1,0)、绿色(0,1)进行编解码,则其编码序列为(1,0)(0,1)(0,1)(1,0),又如按红、蓝、蓝、绿、红排列的五条条纹,如通过红色(1,0,0)、绿色(0,1,0)、蓝色(0,0,1)进行编解码,则其编码序列为(1,0,0)、(0,0,1)、(0,0,1)、(0,1,0);Specifically, in step S705, the sequence of stripes in multiple stripe images is determined based on the coding diagram, and the coding sequence is determined based on the arrangement information and color information of each stripe in the coding diagram, for example, for four stripes arranged in red, green, green and red Stripes, if coded and decoded by red (1,0) and green (0,1), the coding sequence is (1,0)(0,1)(0,1)(1,0). Five stripes arranged in red, blue, blue, green, and red, if encoded and decoded by red (1,0,0), green (0,1,0), and blue (0,0,1), then the code The sequence is (1,0,0), (0,0,1), (0,0,1), (0,1,0);
具体地,步骤S707,基于编码序列对重建图的各条纹进行条纹匹配,对于双目重建,结合本实施例即具有两个图像采集装置,对两个图像采集装置的重建图进行条纹匹配,匹配后进行点云的重建,获取目标对象的三维数据,对于单目重建,结合本实施例即具有一个图像采集装置,对图像采集装置的重建图及投影装置的预设光线进行条纹匹配,匹配后进行点云的重建,获取目标对象的三维数据。Specifically, in step S707, stripe matching is performed on each stripe of the reconstructed image based on the coding sequence. For binocular reconstruction, in combination with this embodiment, there are two image acquisition devices, and stripe matching is performed on the reconstructed images of the two image acquisition devices. Afterwards, the reconstruction of the point cloud is carried out to obtain the three-dimensional data of the target object. For monocular reconstruction, an image acquisition device is provided in conjunction with this embodiment, and the fringe matching is performed on the reconstruction image of the image acquisition device and the preset light of the projection device. After matching Perform point cloud reconstruction to obtain 3D data of the target object.
图8是根据本申请实施例的三维扫描方法的流程图。如图8所示,该三维扫描方法包括:Fig. 8 is a flowchart of a three-dimensional scanning method according to an embodiment of the present application. As shown in Figure 8, the three-dimensional scanning method includes:
步骤S801,获取第一图像和第二图像,第一图像与第二图像为基于同一光束获取到的条纹图像;Step S801, acquiring a first image and a second image, where the first image and the second image are fringe images acquired based on the same light beam;
步骤S803,基于第一图像确定各条纹的编码序列;Step S803, determining the coding sequence of each stripe based on the first image;
步骤S805,基于编码序列对第二图像的条纹进行条纹匹配,实现三维重建以获取目标对象的三维数据。Step S805, performing stripe matching on the stripes of the second image based on the encoding sequence to realize 3D reconstruction to obtain 3D data of the target object.
该三维扫描方法进一步包括:The three-dimensional scanning method further includes:
步骤S807,获取纹理数据,基于三维数据及纹理数据获取目标对象的彩色三维数据。Step S807, acquiring texture data, and acquiring color 3D data of the target object based on the 3D data and the texture data.
优选地,第一图像(第二图像)与纹理数据交替获取。Preferably, the first image (second image) is acquired alternately with the texture data.
以下通过具体方法进行说明:The specific methods are described below:
投影装置于第一时刻投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经半反半透棱镜分离成两红绿蓝彩色编码条纹,一红绿蓝彩色编码条纹由彩色相机采集,彩色相机生成对应的红绿蓝彩色编码条纹图像,另一红绿蓝彩色编码条纹通过蓝色滤光片由黑白相机采集,黑白相机生成对应的蓝色条纹图像,照明件于第二时刻照射白光至目标对象,经目标对象反射后由彩色相机采集,彩色相机生成纹理图,基于红绿蓝彩色编码条纹图像确定各条纹的编码序列,基于编码序列对蓝色条纹图像的各条纹进行条纹匹配,实现三维重建获取目标对象的三维数据,基于三维数据及纹理图获取目标对象的真彩三维数据。The projection device projects the red, green and blue color-coded stripes to the target object at the first moment, and transmits them to the image processing device after being modulated by the target object. The red, green and blue color-coded stripes are separated into two red, green and blue color-coded stripes by a semi-reflective and semi-transparent prism. One red, green, and blue color-coded stripe is collected by a color camera, and the color camera generates a corresponding red, green, and blue color-coded stripe image, and the other red, green, and blue color-coded stripe is collected by a black-and-white camera through a blue filter, and the black-and-white camera generates a corresponding blue The color fringe image, the lighting part irradiates white light to the target object at the second moment, and is collected by the color camera after being reflected by the target object. The color camera generates a texture map, and the coding sequence of each stripe is determined based on the red, green and blue color coding Stripe matching is performed on each stripe of the blue stripe image to achieve 3D reconstruction to obtain 3D data of the target object, and to obtain true-color 3D data of the target object based on the 3D data and texture map.
投影装置于第一时刻投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经半反半透棱镜分离成两红绿蓝彩色编码条纹,一红绿蓝彩色编码条纹由彩色相机采集,彩色相机生成对应的红绿蓝彩色编码条纹图像,投影装置于第三时刻投射蓝色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,蓝色编码条纹依次通过半反半透棱镜和蓝色滤光片由黑白相机采集,黑白相机生成对应的蓝色条纹图像,其中蓝色编码条纹与红绿蓝彩色编码条纹中的蓝色条纹具有相对应,照明件于第二时刻照射白光至目标对象,经目标对象反射后由彩色相机采集,彩色相机生成纹理图,基于红绿蓝彩色编码条纹图像确定各条纹的编码序列,基于编码序列对蓝色条纹图像的各条纹进行条纹匹配,实现三维重建获取目标对象的三维数据,基于三维数据及纹理图获取目标对象的真彩三维数据。The projection device projects the red, green and blue color-coded stripes to the target object at the first moment, and transmits them to the image processing device after being modulated by the target object. The red, green and blue color-coded stripes are separated into two red, green and blue color-coded stripes by a semi-reflective and semi-transparent prism. A red, green, and blue color-coded stripe is collected by a color camera, and the color camera generates a corresponding red, green, and blue color-coded stripe image, and the projection device projects the blue-coded stripe to the target object at the third moment, and transmits it to the image processing device after being modulated by the target object , the blue coded stripes pass through the semi-reflective prism and the blue filter in turn and are collected by the black and white camera, and the black and white camera generates the corresponding blue stripe image, where the blue coded stripes are the same as the blue stripes in the red, green and blue color coded stripes Correspondingly, the lighting part irradiates white light to the target object at the second moment, and is collected by the color camera after being reflected by the target object. The color camera generates a texture map, and the coding sequence of each stripe is determined based on the red, green and blue color coding stripe image. Stripe matching is performed on each stripe of the blue stripe image to achieve 3D reconstruction to obtain 3D data of the target object, and to obtain true-color 3D data of the target object based on the 3D data and texture map.
投影装置于第一时刻投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经直角两通道分色棱镜分解成一红绿条纹和一蓝色条纹,红绿条纹由彩色相机采集,彩色相机生成对应的红绿条纹图像,蓝色条纹由黑白相机采集,黑白相机生成对应的蓝色条纹图像,照明件于第二时刻照射白光至目标对象,经目标对象反射后由彩色相机和黑白相机采集,彩色相机生成基于红光和绿光的纹理图,黑白相机生成基于蓝光的纹理图,基于红绿条纹图像确定各条纹的编码序列,基于编码序列对蓝色条纹图像的各条纹进行条纹匹配,实现三维重建获取目标对象的三维数据,基于彩色相机的纹理图和黑白相机的纹理图合成基于白光的纹理图,基于三维数据及白光的纹理图获取目标对象的真彩三维数据。The projection device projects red, green and blue color-coded stripes to the target object at the first moment, and then transmits them to the image processing device after being modulated by the target object. The red, green and blue color-coded stripes are decomposed into a red-green stripe and a blue color by a right-angle two-channel dichroic prism. Stripes, red and green stripes are collected by a color camera, the color camera generates a corresponding red and green stripe image, blue stripes are collected by a black and white camera, and the black and white camera generates a corresponding blue stripe image, the lighting part irradiates white light to the target object at the second moment, After being reflected by the target object, it is collected by a color camera and a black and white camera. The color camera generates a texture map based on red light and green light, and the black and white camera generates a texture map based on blue light. The coding sequence of each stripe is determined based on the red and green stripe image. Based on the coding sequence Stripe matching is performed on each stripe of the blue stripe image to achieve 3D reconstruction to obtain the 3D data of the target object, and the texture map based on the white light is synthesized based on the texture map of the color camera and the texture map of the black and white camera, and the texture map is obtained based on the 3D data and white light True-color 3D data of the target object.
投影装置于第一时刻投射红绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,红绿蓝彩色编码条纹经三通道分色棱镜分解成一红条纹、一绿条纹和一蓝色条纹,红条纹由第一黑白相机采集,第一黑白相机生成对应的红色条纹图像,绿条纹由第二黑白相机采集,第二黑白相机生成对应的绿色条纹图像,蓝条纹由第三黑白相机采集,第三黑白相机生成对应的蓝色条纹图像,照明件于第二时刻照射白光至目标对象,经目标对象反射后由三个黑白相机采集,第一黑白相机生成基于红光的纹理图,第二黑白相机生成基于绿光的纹理图,第三黑白相机生成基于蓝光的纹理图,基于红色条纹图像、绿色条纹图像和蓝色条纹图像的组合确定各条纹的编码序列,基于编码序列对红色条纹图像、绿色条纹图像和蓝色条纹图像的各条纹进行条纹匹配,实现三维重建获取目标对象的三维数据,基于三个黑白相机的纹理图合成基于白光的纹理图,基于三维数据及白光的纹理图获取目标对象的真彩三维数据。投影装置于第一时刻投射绿蓝彩色编码条纹至目标对象,经目标对象调制后传输至图像处理装置,绿蓝彩色编码条纹经三通道分色棱镜分解成一绿条纹和一蓝色条纹,绿条纹由第二黑白相机采集,第二黑白相机生成对应的绿色条纹图像,蓝条纹由第三黑白相机采集,第三黑白相机生成对应的蓝色条纹图像,照明件于第二时刻照射白光至目标对象,经目标对象反射后由三个黑白相机采集,第一黑白相机生成基于红光的纹理图,第二黑白相机生成基于绿光的纹理图,第三黑白相机生成基于蓝光的纹理图,基于绿色条纹图像和蓝色条纹图像的组合确定各条纹的编码序列,基于编码序列对绿色条纹图像和蓝色条纹图像的各条纹进行条纹匹配,实现三维重建获取目标对象的三维数据,基于三个黑白相机的纹理图合成基于白光的纹理图,基于三维数据及白光的纹理图获取目标对象的真彩三维数据。The projection device projects the red, green and blue color-coded stripes to the target object at the first moment, and transmits them to the image processing device after being modulated by the target object. The red, green and blue color-coded stripes are decomposed into a red stripe, a green stripe and a Blue stripes and red stripes are collected by the first black and white camera, the first black and white camera generates the corresponding red stripe image, green stripes are collected by the second black and white camera, the second black and white camera generates the corresponding green stripe image, blue stripes are generated by the third black and white Camera acquisition, the third black-and-white camera generates the corresponding blue stripe image, the lighting part irradiates white light to the target object at the second moment, and is collected by the three black-and-white cameras after being reflected by the target object, the first black-and-white camera generates a texture map based on red light , the second black-and-white camera generates a texture map based on green light, the third black-and-white camera generates a texture map based on blue light, and determines the coding sequence of each stripe based on the combination of the red stripe image, the green stripe image and the blue stripe image. The stripes of the red stripe image, the green stripe image and the blue stripe image are matched to achieve 3D reconstruction to obtain the 3D data of the target object, and the texture map based on the white light is synthesized based on the texture maps of the three black and white cameras. Texture maps capture true-color 3D data of the target object. The projection device projects green and blue color-coded stripes to the target object at the first moment, and transmits them to the image processing device after being modulated by the target object. The green and blue color-coded stripes are decomposed into a green stripe and a blue stripe by a three-channel dichroic prism, and the green stripe Captured by the second black-and-white camera, the second black-and-white camera generates the corresponding green stripe image, the blue stripe is collected by the third black-and-white camera, the third black-and-white camera generates the corresponding blue stripe image, and the lighting part irradiates white light to the target object at the second moment , is collected by three black and white cameras after being reflected by the target object. The first black and white camera generates a texture map based on red light, the second black and white camera generates a texture map based on green light, the third black and white camera generates a texture map based on blue light, and the third black and white camera generates a texture map based on green light. The combination of the stripe image and the blue stripe image determines the coding sequence of each stripe, and performs stripe matching on each stripe of the green stripe image and the blue stripe image based on the coding sequence to realize 3D reconstruction and obtain the 3D data of the target object, based on three black and white cameras The texture map is synthesized based on the white light texture map, and the true-color 3D data of the target object is obtained based on the 3D data and the white light texture map.
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。It should be noted that the steps shown in the flowcharts of the accompanying drawings may be performed in a computer system, such as a set of computer-executable instructions, and that although a logical order is shown in the flowcharts, in some cases, The steps shown or described may be performed in an order different than here.
本发明实施例提供了一种存储介质,其上存储有程序,该程序被处理器执行时实现所述三维扫描方法。An embodiment of the present invention provides a storage medium on which a program is stored, and when the program is executed by a processor, the three-dimensional scanning method is realized.
本发明实施例提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行所述三维扫描方法。An embodiment of the present invention provides a processor, and the processor is used to run a program, wherein the three-dimensional scanning method is executed when the program is running.
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。It should also be noted that the term "comprises", "comprises" or any other variation thereof is intended to cover a non-exclusive inclusion such that a process, method, article, or apparatus comprising a set of elements includes not only those elements, but also includes Other elements not expressly listed, or elements inherent in the process, method, commodity, or apparatus are also included. Without further limitations, an element defined by the phrase "comprising a ..." does not preclude the presence of additional identical elements in the process, method, article, or apparatus that includes the element.
还需要说明的是:在本发明各个实施例中的各功能单元可以集成在一个物理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。It should also be noted that each functional unit in each embodiment of the present invention may be integrated into one physical unit, each unit may exist separately physically, or two or more units may be integrated into one unit.
本领域技术人员应明白,本申请的实施例可提供为方法、系统或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。Those skilled in the art should understand that the embodiments of the present application may be provided as methods, systems or computer program products. Accordingly, the present application can take the form of an entirely hardware embodiment, an entirely software embodiment or an embodiment combining software and hardware aspects. Furthermore, the present application may take the form of a computer program product embodied on one or more computer-usable storage media (including but not limited to disk storage, CD-ROM, optical storage, etc.) having computer-usable program code embodied therein.
以上仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。The above are only examples of the present application, and are not intended to limit the present application. For those skilled in the art, various modifications and changes may occur in this application. Any modification, equivalent replacement, improvement, etc. made within the spirit and principle of the present application shall be included within the scope of the claims of the present application.
以及,在本发明的上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。And, in the above-mentioned embodiments of the present invention, descriptions of each embodiment have their own emphases, and for parts not described in detail in a certain embodiment, reference may be made to relevant descriptions of other embodiments.
Claims (14)
Translated fromChinesePriority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911018729.0ACN112710253B (en) | 2019-10-24 | 2019-10-24 | Three-dimensional scanner and three-dimensional scanning method |
| AU2020371142AAU2020371142B2 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
| CA3158933ACA3158933A1 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
| US17/771,470US12007224B2 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
| PCT/CN2020/123684WO2021078300A1 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
| KR1020227017511AKR102686393B1 (en) | 2019-10-24 | 2020-10-26 | 3D scanner and 3D scanning method |
| EP20878731.7AEP4050302B1 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
| JP2022524057AJP7298025B2 (en) | 2019-10-24 | 2020-10-26 | Three-dimensional scanner and three-dimensional scanning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911018729.0ACN112710253B (en) | 2019-10-24 | 2019-10-24 | Three-dimensional scanner and three-dimensional scanning method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112710253A CN112710253A (en) | 2021-04-27 |
| CN112710253Btrue CN112710253B (en) | 2023-06-06 |
Family
ID=75540321
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911018729.0AActiveCN112710253B (en) | 2019-10-24 | 2019-10-24 | Three-dimensional scanner and three-dimensional scanning method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112710253B (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113936095A (en)* | 2021-09-28 | 2022-01-14 | 先临三维科技股份有限公司 | Scanner and scanning method |
| CN114268703B (en)* | 2021-12-27 | 2024-10-18 | 安徽淘云科技股份有限公司 | Imaging adjustment method and device, storage medium and equipment during screen scanning |
| CN116408575B (en)* | 2021-12-31 | 2024-06-04 | 广东美的白色家电技术创新中心有限公司 | Method, device and system for locally scanning and eliminating workpiece reflection interference |
| CN114521982A (en)* | 2022-02-21 | 2022-05-24 | 资阳联耀医疗器械有限责任公司 | Intraoral scanner, intraoral scanning implementation method and storage medium |
| CN117522940A (en)* | 2022-07-27 | 2024-02-06 | 梅卡曼德(北京)机器人科技有限公司 | Three-dimensional laser camera, calibration method and method for acquiring color point cloud image |
| CN116982940B (en)* | 2023-09-26 | 2024-02-27 | 北京朗视仪器股份有限公司 | Oral cavity scanning system and method |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1576779A (en)* | 2003-06-30 | 2005-02-09 | 韦尔豪泽公司 | Method and system for three-dimensionally imaging an apical dome of a plant |
| CN102494609A (en)* | 2011-11-18 | 2012-06-13 | 李志扬 | Three-dimensional photographing process based on laser probe array and device utilizing same |
| CN105407344A (en)* | 2014-09-09 | 2016-03-16 | 深圳市绎立锐光科技开发有限公司 | Stereo image projection device and stereoscopic display glasses |
| WO2017203756A1 (en)* | 2016-05-26 | 2017-11-30 | Ckd株式会社 | Three-dimensional-measurement device |
| CN109283186A (en)* | 2018-10-12 | 2019-01-29 | 成都精工华耀科技有限公司 | A kind of double spectrum two-dimensionals of track visualization inspection and three-dimensional fusion imaging system |
| CN109489583A (en)* | 2018-11-19 | 2019-03-19 | 先临三维科技股份有限公司 | Projection arrangement, acquisition device and the 3 D scanning system with it |
| CN110381300A (en)* | 2018-04-13 | 2019-10-25 | 豪威科技股份有限公司 | There are four the imaging systems of imaging sensor for tool |
| TW201944771A (en)* | 2018-04-09 | 2019-11-16 | 美商豪威科技股份有限公司 | Imaging system having four image sensors |
- 2019
- 2019-10-24CNCN201911018729.0Apatent/CN112710253B/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1576779A (en)* | 2003-06-30 | 2005-02-09 | 韦尔豪泽公司 | Method and system for three-dimensionally imaging an apical dome of a plant |
| CN102494609A (en)* | 2011-11-18 | 2012-06-13 | 李志扬 | Three-dimensional photographing process based on laser probe array and device utilizing same |
| CN105407344A (en)* | 2014-09-09 | 2016-03-16 | 深圳市绎立锐光科技开发有限公司 | Stereo image projection device and stereoscopic display glasses |
| WO2017203756A1 (en)* | 2016-05-26 | 2017-11-30 | Ckd株式会社 | Three-dimensional-measurement device |
| TW201944771A (en)* | 2018-04-09 | 2019-11-16 | 美商豪威科技股份有限公司 | Imaging system having four image sensors |
| CN110381300A (en)* | 2018-04-13 | 2019-10-25 | 豪威科技股份有限公司 | There are four the imaging systems of imaging sensor for tool |
| CN109283186A (en)* | 2018-10-12 | 2019-01-29 | 成都精工华耀科技有限公司 | A kind of double spectrum two-dimensionals of track visualization inspection and three-dimensional fusion imaging system |
| CN109489583A (en)* | 2018-11-19 | 2019-03-19 | 先临三维科技股份有限公司 | Projection arrangement, acquisition device and the 3 D scanning system with it |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112710253A (en) | 2021-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112710253B (en) | Three-dimensional scanner and three-dimensional scanning method | |
| CN112985307B (en) | Three-dimensional scanner, system and three-dimensional reconstruction method | |
| CN109489583B (en) | Projection device, acquisition device and three-dimensional scanning system with same | |
| JP6392934B2 (en) | Light source system and projection apparatus | |
| KR101824328B1 (en) | 3-D scanner and the scanning method using the chromatic aberration | |
| CN112712583B (en) | Three-dimensional scanner, three-dimensional scanning system, and three-dimensional scanning method | |
| US20240004175A1 (en) | Intraoral scanner with optical system for minimizing stray light | |
| CN117750167A (en) | Image acquisition apparatus and method | |
| WO2021078300A1 (en) | Three-dimensional scanner and three-dimensional scanning method | |
| CN101750753A (en) | System for eliminating laser speckles and projector using same | |
| CN112930468B (en) | Three-dimensional measuring device | |
| JP2004198500A5 (en) | ||
| CN102722031A (en) | Optical system of laser true three-dimensional display | |
| CN103412461B (en) | 3D imaging system based on light splitting piece | |
| WO2020097941A1 (en) | Optical engine used for three-dimensional detection and three-dimensional detection device | |
| CN201314977Y (en) | System for eliminating laser speckle and projector using the system | |
| JPH08211329A (en) | Illumination device and projection display device using the same | |
| CN115981073A (en) | Multi-light-path projection device, three-dimensional measurement system and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |