CN112698352B - An obstacle recognition device for electric locomotives - Google Patents
An obstacle recognition device for electric locomotivesDownload PDFInfo
- Publication number
- CN112698352B CN112698352BCN202011544281.9ACN202011544281ACN112698352BCN 112698352 BCN112698352 BCN 112698352BCN 202011544281 ACN202011544281 ACN 202011544281ACN 112698352 BCN112698352 BCN 112698352B
- Authority
- CN
- China
- Prior art keywords
- data
- obstacle
- signal
- unit
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/02—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/50—Determining position whereby the position solution is constrained to lie upon a particular curve or surface, e.g. for locomotives on railway tracks
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Electromagnetism (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及一种障碍物识别装置,具体为一种用于电机车的障碍物识别装置。The invention relates to an obstacle identification device, in particular to an obstacle identification device for electric locomotives.
背景技术Background technique
电机车是轨道车辆运输的一种牵引设备,动力是利用牵引电机驱动车轮转动,借助车轮与轨面间的摩擦力,使机车在轨道上运行,在煤矿的生产运输过程中,电机车往往需要人工司机进行驾驶。The electric locomotive is a kind of traction equipment for rail vehicle transportation. The power is to use the traction motor to drive the wheels to rotate. With the help of the friction between the wheels and the rail surface, the locomotive runs on the track. During the production and transportation of coal mines, the electric locomotive often needs Human drivers do the driving.
但是人工驾驶存在着诸多问题,由于司机的水平不一致,会导致生产运输效率不稳定,且司机长时间在较差的工作环境中驾驶电机车,容易出现疲劳驾驶的问题,对轨道中出现的障碍物反应不及时,往往会引发事故,使人员和财产安全受到威胁,为此,我们提出一种用于电机车的障碍物识别装置。However, there are many problems in manual driving. Due to the inconsistent level of drivers, the production and transportation efficiency will be unstable, and drivers drive electric locomotives in a poor working environment for a long time, which is prone to fatigue driving problems. Failure to respond to objects in time will often lead to accidents and threaten the safety of personnel and property. Therefore, we propose an obstacle recognition device for electric locomotives.
发明内容Contents of the invention
本发明的目的就在于提供一种用于电机车的障碍物识别装置,通过设置数据采集单元和数据分析单元,利用雷达和摄像头对障碍物的距离、尺寸以及类型进行识别判断,提高对障碍物的识别精度和准确性,提高了电机车自主行驶的安全系数,降低了人工驾驶的劳动强度,通过设置镜头清洁单元,利用数据采集单元对杂质点的密度进行分析计算,从而确定镜头的清晰程度,并利用活动块与海绵的往复运动对镜头进行清理,确保了镜头的清晰度,从而提高了障碍物图像的质量,降低了图像识别的难度,提高了识别速度和准确性,从而提高了装置的可靠性。The object of the present invention is to provide an obstacle recognition device for electric locomotives. By setting a data acquisition unit and a data analysis unit, radar and camera are used to identify and judge the distance, size and type of obstacles, so as to improve the recognition of obstacles. The identification precision and accuracy of the electric locomotive improve the safety factor of autonomous driving and reduce the labor intensity of manual driving. By setting the lens cleaning unit and using the data acquisition unit to analyze and calculate the density of impurity points, the clarity of the lens can be determined. , and use the reciprocating motion of the movable block and the sponge to clean the lens to ensure the clarity of the lens, thereby improving the quality of the obstacle image, reducing the difficulty of image recognition, and improving the recognition speed and accuracy, thereby improving the device reliability.
本发明所解决的技术问题为:The technical problem solved by the present invention is:
(1)如何通过设置数据采集单元和数据分析单元,利用雷达和摄像头对障碍物的距离、尺寸以及类型进行识别判断,解决现有技术中电机车不能自主进行障碍物识别的问题;(1) How to use radar and camera to identify and judge the distance, size and type of obstacles by setting the data acquisition unit and data analysis unit, so as to solve the problem that the electric locomotive cannot autonomously identify obstacles in the prior art;
(2)如何通过设置镜头清洁单元,利用数据采集单元对杂质点的密度进行分析计算,从而确定镜头的清晰程度,并利用活动块与海绵的往复运动对镜头进行清理,解决摄像头在工作过程中镜头污染影响识别效果的问题。(2) How to set up the lens cleaning unit, use the data acquisition unit to analyze and calculate the density of impurity points, so as to determine the clarity of the lens, and use the reciprocating motion of the movable block and the sponge to clean the lens, so as to solve the problem of camera in the working process. Lens pollution affects the recognition effect.
本发明的目的可以通过以下技术方案实现:一种用于电机车的障碍物识别装置,包括数据采集单元、数据分析单元、数据处理单元、镜头清理单元、数据存储单元和驱动控制单元;The purpose of the present invention can be achieved through the following technical solutions: an obstacle identification device for electric vehicles, including a data acquisition unit, a data analysis unit, a data processing unit, a lens cleaning unit, a data storage unit and a drive control unit;
所述数据存储单元中存储有电机车的行驶线路图,所述数据存储单元中还存储有轨道规格数据,所述轨道规格数据表示单根轨道的宽度和高度;The driving route map of the electric locomotive is stored in the data storage unit, and the track specification data is also stored in the data storage unit, and the track specification data represents the width and height of a single track;
所述数据采集单元中包括雷达和摄像头,所述雷达用于发送雷达电波和接收雷达电波,所述摄像头用于对车辆行驶方向上出现的障碍物进行拍摄,雷达将采集到的发射时间数据和接收时间数据发送至数据分析单元;The data acquisition unit includes a radar and a camera, the radar is used to send radar waves and receive radar waves, the camera is used to photograph obstacles appearing in the direction of vehicle travel, and the radar collects the emission time data and The received time data is sent to the data analysis unit;
所述数据分析单元通过对发射时间数据和接收时间数据进行障碍物存在性分析,并将得到的无障碍信号和弯道信号发送至数据处理单元,将得到的障碍确认信号发送至数据采集单元,所述数据采集单元识别到障碍确认信号后,开启摄像头对行驶方向上的障碍物进行连续拍摄,生成障碍物图像数据并将其传送至数据分析单元进行障碍物特征分析,并将得到减速信号、停车信号和驱离信号传输至数据处理单元;The data analysis unit analyzes the existence of obstacles on the transmission time data and the reception time data, and sends the obtained obstacle-free signal and curve signal to the data processing unit, and sends the obtained obstacle confirmation signal to the data acquisition unit, After the data acquisition unit recognizes the obstacle confirmation signal, it turns on the camera to continuously shoot obstacles in the direction of travel, generates image data of obstacles and sends them to the data analysis unit for obstacle feature analysis, and obtains deceleration signals, The parking signal and driving away signal are transmitted to the data processing unit;
所述数据采集单元还用于对采集到的障碍物图像数据进行清晰度检测,将障碍物图像数据均分为若干个单元格,并对各单元格内的杂质点进行记录并杂质点密度数据,数据采集单元中预设有杂质点密度限值,当任意单元格内的杂质点密度数据大于等于杂质点密度限值时,判定摄像头的镜头玻璃不清晰,生成清理信号并传输至数据处理单元,当任意单元格内的杂质点密度数据小于杂质点密度限值时,不进行任何处理;The data acquisition unit is also used to detect the clarity of the collected obstacle image data, divide the obstacle image data into several cells, and record the impurity points in each cell and obtain the impurity point density data. , the data acquisition unit presets the limit value of impurity point density, when the impurity point density data in any cell is greater than or equal to the limit value of impurity point density, it is determined that the lens glass of the camera is not clear, a cleaning signal is generated and transmitted to the data processing unit , when the impurity point density data in any cell is less than the impurity point density limit, no processing is performed;
所述数据处理单元接收到无障碍信号、弯道信号、减速信号、停车信号和驱离信号并进行识别,当识别到无障碍信号时,不进行任何处理,当识别到弯道信号时,向驱动控制单元发出减速和警示指令,当识别到减速信号时,向驱动控制单元发出减速指令,当识别到停车信号时,向驱动控制单元发出刹车指令,当识别到驱离信号时,向驱动控制单元发出鸣笛指令,当识别到清理信号时,向镜头清理单元发出清理指令;The data processing unit receives and recognizes the barrier-free signal, curve signal, deceleration signal, stop signal and drive-off signal. When the barrier-free signal is recognized, no processing is performed. When the curve signal is recognized, the The drive control unit issues a deceleration and warning command. When a deceleration signal is recognized, a deceleration command is sent to the drive control unit. When a stop signal is recognized, a braking command is sent to the drive control unit. The unit issues a whistle command, and when the cleaning signal is recognized, it sends a cleaning command to the lens cleaning unit;
所述驱动控制单元接收减速指令时,进行降档减速,接收到警示指令时,进行单次鸣笛,接收到刹车指令时,进行刹车直至速度降为零,接收到鸣笛指令时,进行连续鸣笛,持续五秒;When the drive control unit receives a deceleration command, it performs downshift deceleration, when it receives a warning command, it whistles once, when it receives a brake command, it brakes until the speed drops to zero, and when it receives a whistle command, it performs continuous Honk for five seconds;
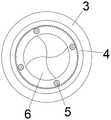
所述镜头清理单元接收到清理指令后进行镜头清理操作,所述镜头清理单元包括套座,所述套座固定安装在摄像头的一侧,所述套座内同轴心设置有传动齿环,所述传动齿环与套座转动连接,所述传动齿环的内侧等角度设置有若干个传动齿轮,若干个所述传动齿轮通过销轴均与套座转动连接,传动齿轮均与传动齿环通过轮齿啮合连接,销轴远离传动齿轮的一端固定连接有活动块,若干个所述活动块相互配合,所述活动块的一侧表面安装有海绵,所述海绵的侧面与摄像头的镜片表面相接触,所述活动块的侧面开设有一排酒精喷洒孔和一排风干孔,所述酒精喷洒孔和风干孔分别设置在海绵的两侧,所述套座远离传动齿轮的一侧设置微型旋转气缸,所述微型电机的活塞杆端部与通过销轴与一个传动齿轮固定连接。The lens cleaning unit performs the lens cleaning operation after receiving the cleaning instruction. The lens cleaning unit includes a sleeve, and the sleeve is fixedly installed on one side of the camera. A transmission gear ring is arranged coaxially in the sleeve. The transmission gear ring is rotatably connected with the sleeve, and several transmission gears are arranged at equal angles on the inner side of the transmission gear ring. Connected through the meshing of gear teeth, the end of the pin shaft away from the transmission gear is fixedly connected with a movable block, and several of the movable blocks cooperate with each other, and a sponge is installed on one side of the movable block, and the side surface of the sponge is in contact with the lens surface of the camera In contact with each other, a row of alcohol spray holes and a row of air-dry holes are provided on the side of the movable block. The alcohol spray holes and air-dry holes are respectively arranged on both sides of the sponge, and the side of the sleeve away from the transmission gear is provided with a micro-rotary A cylinder, the end of the piston rod of the micro motor is fixedly connected with a transmission gear through a pin shaft.
本发明的进一步技术改进在于:所述数据分析单元进行障碍物存在性分析的具体步骤如下:The further technical improvement of the present invention is that: the specific steps of the data analysis unit performing obstacle existence analysis are as follows:
步骤一:将发射时间数据标记为FTi,将接收时间数据标记为STi,其中,i表示雷达波的发送次数序号,i=1,2,3……n1;Step 1: mark the launch time data as FTi, and mark the reception time data as STi, wherein, i represents the number of sending times of radar waves, i=1, 2, 3...n1;
步骤二:数据分析单元中预设有一个存在界定时间数据并将其标记为CTs,将接收时间数据与发射时间数据代入到计算式:时间间隔数据=接收时间数据-发射时间数据,得到时间间隔数据并将其标记为GTi;Step 2: In the data analysis unit, there is preset time data for existence and definition, and it is marked as CTs, and the receiving time data and the transmitting time data are substituted into the calculation formula: time interval data=receiving time data-transmitting time data, and the time interval is obtained data and label it as GTi;
步骤三:将时间间隔数据与存在界定时间数据进行比对,当时间间隔数据大于存在限定时间数据时,判定电机车行驶方向上不存在障碍物,生成无障碍信号,当时间间隔数据小于等于存在限定时间数据时,判定电机车行驶方向存在障碍,同时进行步骤四;Step 3: Compare the time interval data with the existence limit time data. When the time interval data is greater than the existence limit time data, it is determined that there is no obstacle in the driving direction of the electric locomotive, and an obstacle-free signal is generated. When the time interval data is less than or equal to the existence When the time data is limited, it is determined that there is an obstacle in the driving direction of the electric locomotive, and
步骤四:从数据存储单元中提取行驶线路图,数据分析单元通过GPS定位获取电机车的实时位置数据,并根据实时位置数据在行驶线路图中进行位置标记,并通过测算行驶线路图中电机车的位置标记与行驶方向上下一个弯道之间的长度,将该长度标记为测算长度数据,将测算长度数据代入到计算式:实际长度数据=测算长度数据/比例尺,得到实际长度数据并将其标记为SC;Step 4: Extract the driving route map from the data storage unit, the data analysis unit obtains the real-time position data of the electric locomotive through GPS positioning, and marks the position in the driving route map according to the real-time position data, and calculates the electric locomotive in the driving route map The length between the position mark of the position mark and the next curve in the driving direction, the length is marked as the measured length data, and the measured length data is substituted into the calculation formula: actual length data=measured length data/scale, the actual length data is obtained and marked SC;
步骤五:数据分析单元中预设有弯道认定距离,当实际长度数据小于弯道认定距离,判定该障碍物为矿道侧壁,生成弯道信号,当实际长度数据大于等于弯道认定数据时,判定障碍物为轨道障碍物,生成障碍确认信号。Step 5: The data analysis unit presets the curve identification distance. When the actual length data is less than the curve identification distance, it is determined that the obstacle is the side wall of the mine road and a curve signal is generated. When the actual length data is greater than or equal to the curve identification data , it is determined that the obstacle is a track obstacle, and an obstacle confirmation signal is generated.
本发明的进一步技术改进在于:所述障碍物特征分析的具体步骤如下:A further technical improvement of the present invention is: the specific steps of the obstacle feature analysis are as follows:
S31:将接收到的障碍物图像数据标记为TXj,其中,j表示连续拍摄中各个时刻的图像标号,j=1,2,3……n2,从数据存储单元中获取轨道规格数据并将其内的轨道宽度标记为轨道宽度数据KD,将其内的轨道高度标记为轨道高度数据GD;S31: Mark the received obstacle image data as TXj, where j represents the image label at each moment in the continuous shooting, j=1, 2, 3...n2, acquire the track specification data from the data storage unit and save it The track width in is marked as track width data KD, and the track height in it is marked as track height data GD;
S32:对多个障碍物影像数据进行识别,当在障碍物影像数据中识别到轨道特征影像时,选取该障碍物影像数据,并将轨道作为参照物,并将轨道宽度数据和轨道高度数据代入到OpenCV算法中,得到障碍物的障碍宽度数据和障碍高度数据,数据分析单元中预设有宽度限定数据和高度限定数据,当障碍宽度数据大于等于宽度限定数据或障碍高度数据大于等于高度限定数据时,判定电机车无法顺利通行,生成减速信号并进入步骤S33,当障碍宽度数据小于宽度限定数据且障碍高度数据小于高度限定数据时,判定电机车能够顺利通行,不进行任何处理;S32: Identify a plurality of obstacle image data, when the track feature image is identified in the obstacle image data, select the obstacle image data, use the track as a reference object, and substitute the track width data and track height data into In the OpenCV algorithm, the obstacle width data and the obstacle height data of the obstacle are obtained. The data analysis unit is preset with the width limit data and the height limit data. When the obstacle width data is greater than or equal to the width limit data or the obstacle height data is greater than or equal to the height limit data , it is determined that the electric locomotive cannot pass smoothly, and a deceleration signal is generated and enters step S33. When the obstacle width data is less than the width limit data and the obstacle height data is less than the height limit data, it is determined that the electric locomotive can pass smoothly, and no processing is performed;
S33:对多个相邻时刻的障碍物图像数据中的特征影像进行提取,所述特征影像表示除去环境背景的障碍物本体影像,将多个特征影像进行差异性比对,当多个特征影像均完全相同时,判定该障碍物的固定障碍物,生成停车信号,当多个特征影像的状态不一致时,判定该障碍物为活动障碍物,生成驱离信号。S33: Extract the feature images in the obstacle image data at multiple adjacent times, the feature images represent the obstacle body images without the environmental background, compare the differences of the multiple feature images, when the multiple feature images If they are all the same, it is determined that the obstacle is a fixed obstacle, and a stop signal is generated; when the states of multiple feature images are inconsistent, it is determined that the obstacle is a moving obstacle, and a drive-away signal is generated.
本发明的进一步技术改进在于:所述镜头清理单元进行镜头清理操作的具体为:The further technical improvement of the present invention is that: the lens cleaning unit performs the lens cleaning operation specifically as follows:
当识别到清理指令时,活动块侧面设置的酒精喷洒孔对镜头表面进行酒精喷洒,同时启动微型旋转气缸进行往复旋转,从而带动与微型旋转气缸的活塞杆端部固定连接的传动齿轮往复转动,通过轮齿的啮合传动,带动传动齿环发生往复转动,进而使其他的传动齿轮往复转动,同时带动活动块绕销轴往复运动,对镜头表面进行清理,同时从风干孔内吹出热风对镜头表面进行干燥,完成镜头的清理,在摄像头不使用时,若干个活动块呈相互接触配合状态,在摄像头使用时,若干个活动块呈相互分离状态。When the cleaning instruction is recognized, the alcohol spray hole set on the side of the movable block sprays alcohol on the surface of the lens, and at the same time starts the micro rotary cylinder to reciprocate, thereby driving the transmission gear fixedly connected to the end of the piston rod of the micro rotary cylinder to rotate reciprocally. Through the meshing transmission of the gear teeth, the transmission gear ring is driven to reciprocate, and then other transmission gears are reciprocated, and at the same time, the movable block is driven to reciprocate around the pin shaft to clean the lens surface, and at the same time, hot air is blown from the air drying hole to the lens surface. Drying is carried out, and the cleaning of the lens is completed. When the camera is not in use, several movable blocks are in a state of mutual contact and cooperation, and when the camera is in use, several movable blocks are in a state of mutual separation.
与现有技术相比,本发明的有益效果是:Compared with prior art, the beneficial effect of the present invention is:
1、本发明在使用时,数据采集单元中的雷达发送雷达电波和接收雷达电波,摄像头对车辆行驶方向上出现的障碍物进行拍摄,雷达将采集到的发射时间数据和接收时间数据发送至数据分析单元,数据分析单元通过对发射时间数据和接收时间数据进行障碍物存在性分析,并将得到的无障碍信号和弯道信号发送至数据处理单元,将得到的障碍确认信号发送至数据采集单元,数据采集单元识别到障碍确认信号后,开启摄像头对行驶方向上的障碍物进行连续拍摄,生成障碍物图像数据并将其传送至数据分析单元进行障碍物特征分析,并将得到减速信号、停车信号和驱离信号传输至数据处理单元,通过设置数据采集单元和数据分析单元,利用雷达和摄像头对障碍物的距离、尺寸以及类型进行识别判断,提高对障碍物的识别精度和准确性,提高了电机车自主行驶的安全系数,降低了人工驾驶的劳动强度。1. When the present invention is in use, the radar in the data acquisition unit sends radar waves and receives radar waves, and the camera shoots obstacles that appear in the direction of vehicle travel, and the radar sends the collected emission time data and reception time data to the data The analysis unit, the data analysis unit analyzes the existence of obstacles on the transmission time data and the reception time data, and sends the obtained obstacle-free signal and curve signal to the data processing unit, and sends the obtained obstacle confirmation signal to the data acquisition unit After the data acquisition unit recognizes the obstacle confirmation signal, it turns on the camera to continuously shoot obstacles in the driving direction, generates obstacle image data and sends it to the data analysis unit for obstacle feature analysis, and obtains deceleration signals, parking The signal and drive-off signal are transmitted to the data processing unit. By setting the data acquisition unit and the data analysis unit, the radar and the camera are used to identify and judge the distance, size and type of the obstacle, so as to improve the recognition accuracy and accuracy of the obstacle, and improve the It improves the safety factor of autonomous driving of electric locomotives and reduces the labor intensity of manual driving.
2、数据采集单元还对采集到的障碍物图像数据进行清晰度检测,将障碍物图像数据均分为若干个单元格,并对各单元格内的杂质点进行记录并杂质点密度数据,数据采集单元中预设有杂质点密度限值,当任意单元格内的杂质点密度数据大于等于杂质点密度限值时,判定摄像头的镜头玻璃不清晰,生成清理信号并传输至数据处理单元,当任意单元格内的杂质点密度数据小于杂质点密度限值时,不进行任何处理,镜头清理单元接收到清理指令后进行镜头清理操作,识别到清理指令时,活动块侧面设置的酒精喷洒孔对镜头表面进行酒精喷洒,同时启动微型旋转气缸进行往复旋转,从而带动与微型旋转气缸的活塞杆端部固定连接的传动齿轮往复转动,通过轮齿的啮合传动,带动传动齿环发生往复转动,进而使其他的传动齿轮往复转动,同时带动活动块绕销轴往复运动,对镜头表面进行清理,同时从风干孔内吹出热风对镜头表面进行干燥,完成镜头的清理,通过设置镜头清洁单元,利用数据采集单元对杂质点的密度进行分析计算,从而确定镜头的清晰程度,并利用活动块与海绵的往复运动对镜头进行清理,确保了镜头的清晰度,从而提高了障碍物图像的质量,降低了图像识别的难度,提高了识别速度和准确性,从而提高了装置的可靠性。2. The data acquisition unit also detects the clarity of the collected obstacle image data, divides the obstacle image data into several cells, and records the impurity points in each cell and collects the impurity point density data, data The acquisition unit presets the limit value of impurity point density. When the impurity point density data in any cell is greater than or equal to the limit value of impurity point density, it is determined that the lens glass of the camera is not clear, and a cleaning signal is generated and transmitted to the data processing unit. When the impurity point density data in any cell is less than the limit value of impurity point density, no processing will be performed. The lens cleaning unit will perform lens cleaning operation after receiving the cleaning instruction. When the cleaning instruction is recognized, the alcohol spraying hole set on the side of the movable block will The surface of the lens is sprayed with alcohol, and at the same time, the micro-rotating cylinder is started to reciprocate, thereby driving the transmission gear fixedly connected to the end of the piston rod of the micro-rotating cylinder to reciprocate, and through the meshing transmission of the gear teeth, the transmission gear ring is driven to reciprocate, and then Make other transmission gears reciprocate and drive the movable block to reciprocate around the pin shaft to clean the surface of the lens. At the same time, hot air is blown from the air drying hole to dry the surface of the lens to complete the cleaning of the lens. By setting the lens cleaning unit, the use of data The acquisition unit analyzes and calculates the density of impurity points to determine the clarity of the lens, and uses the reciprocating motion of the movable block and sponge to clean the lens to ensure the clarity of the lens, thereby improving the quality of the obstacle image and reducing the The difficulty of image recognition improves the recognition speed and accuracy, thereby improving the reliability of the device.
附图说明Description of drawings
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings.
图1为本发明的系统框图;Fig. 1 is a system block diagram of the present invention;
图2为本发明电机车整体结构示意图;Fig. 2 is a schematic diagram of the overall structure of the electric locomotive of the present invention;
图3为本发明套座内部结构示意图;Fig. 3 is a schematic diagram of the internal structure of the socket of the present invention;
图4为本发明活动块与镜头连接关系示意图;Fig. 4 is a schematic diagram of the connection relationship between the movable block and the lens of the present invention;
图5为本发明活动块与海绵连接示意图。Fig. 5 is a schematic diagram of the connection between the movable block and the sponge of the present invention.
图中:1、雷达;2、摄像头;3、套座;4、传动齿环;5、传动齿轮;6、活动块;7、海绵。In the figure: 1. Radar; 2. Camera; 3. Housing; 4. Transmission gear ring; 5. Transmission gear; 6. Movable block; 7. Sponge.
具体实施方式Detailed ways
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
请参阅图1-5所示,一种用于电机车的障碍物识别装置,包括数据采集单元、数据分析单元、数据处理单元、镜头清理单元、数据存储单元和驱动控制单元;Please refer to Figure 1-5, an obstacle recognition device for electric locomotives, including a data acquisition unit, a data analysis unit, a data processing unit, a lens cleaning unit, a data storage unit and a drive control unit;
所述数据存储单元中存储有电机车的行驶线路图,所述数据存储单元中还存储有轨道规格数据,所述轨道规格数据表示单根轨道的宽度和高度;The driving route map of the electric locomotive is stored in the data storage unit, and the track specification data is also stored in the data storage unit, and the track specification data represents the width and height of a single track;
所述数据采集单元中包括雷达1和摄像头2,所述雷达1用于发送雷达电波和接收雷达电波,所述摄像头2用于对车辆行驶方向上出现的障碍物进行拍摄,雷达1将采集到的发射时间数据和接收时间数据发送至数据分析单元;The data acquisition unit includes a
所述数据分析单元通过对发射时间数据和接收时间数据进行障碍物存在性分析,并将得到的无障碍信号和弯道信号发送至数据处理单元,将得到的障碍确认信号发送至数据采集单元,所述数据采集单元识别到障碍确认信号后,开启摄像头2对行驶方向上的障碍物进行连续拍摄,生成障碍物图像数据并将其传送至数据分析单元进行障碍物特征分析,并将得到减速信号、停车信号和驱离信号传输至数据处理单元;The data analysis unit analyzes the existence of obstacles on the transmission time data and the reception time data, and sends the obtained obstacle-free signal and curve signal to the data processing unit, and sends the obtained obstacle confirmation signal to the data acquisition unit, After the data acquisition unit recognizes the obstacle confirmation signal, it turns on the
所述数据采集单元还用于对采集到的障碍物图像数据进行清晰度检测,将障碍物图像数据均分为若干个单元格,并对各单元格内的杂质点进行记录并杂质点密度数据,数据采集单元中预设有杂质点密度限值,当任意单元格内的杂质点密度数据大于等于杂质点密度限值时,判定摄像头2的镜头玻璃不清晰,生成清理信号并传输至数据处理单元,当任意单元格内的杂质点密度数据小于杂质点密度限值时,不进行任何处理;The data acquisition unit is also used to detect the clarity of the collected obstacle image data, divide the obstacle image data into several cells, and record the impurity points in each cell and obtain the impurity point density data. , the data acquisition unit presets the impurity point density limit value, when the impurity point density data in any cell is greater than or equal to the impurity point density limit value, it is determined that the lens glass of
所述数据处理单元接收到无障碍信号、弯道信号、减速信号、停车信号和驱离信号并进行识别,当识别到无障碍信号时,不进行任何处理,当识别到弯道信号时,向驱动控制单元发出减速和警示指令,当识别到减速信号时,向驱动控制单元发出减速指令,当识别到停车信号时,向驱动控制单元发出刹车指令,当识别到驱离信号时,向驱动控制单元发出鸣笛指令,当识别到清理信号时,向镜头清理单元发出清理指令;The data processing unit receives and recognizes the barrier-free signal, curve signal, deceleration signal, stop signal and drive-off signal. When the barrier-free signal is recognized, no processing is performed. When the curve signal is recognized, the The drive control unit issues a deceleration and warning command. When a deceleration signal is recognized, a deceleration command is sent to the drive control unit. When a stop signal is recognized, a braking command is sent to the drive control unit. The unit issues a whistle command, and when the cleaning signal is recognized, it sends a cleaning command to the lens cleaning unit;
所述驱动控制单元接收减速指令时,进行降档减速,接收到警示指令时,进行单次鸣笛,接收到刹车指令时,进行刹车直至速度降为零,接收到鸣笛指令时,进行连续鸣笛,持续五秒;When the drive control unit receives a deceleration command, it performs downshift deceleration, when it receives a warning command, it whistles once, when it receives a brake command, it brakes until the speed drops to zero, and when it receives a whistle command, it performs continuous Honk for five seconds;
所述镜头清理单元接收到清理指令后进行镜头清理操作,所述镜头清理单元包括套座3,所述套座3固定安装在摄像头2的一侧,所述套座3内同轴心设置有传动齿环4,所述传动齿环4与套座3转动连接,所述传动齿环4的内侧等角度设置有若干个传动齿轮5,若干个所述传动齿轮5通过销轴均与套座3转动连接,传动齿轮5均与传动齿环4通过轮齿啮合连接,销轴远离传动齿轮5的一端固定连接有活动块6,若干个所述活动块6相互配合,所述活动块6的一侧表面安装有海绵7,所述海绵7的侧面与摄像头2的镜片表面相接触,所述活动块6的侧面开设有一排酒精喷洒孔和一排风干孔,所述酒精喷洒孔和风干孔分别设置在海绵7的两侧,所述套座3远离传动齿轮5的一侧设置微型旋转气缸,所述微型电机的活塞杆端部与通过销轴与一个传动齿轮5固定连接。The lens cleaning unit performs the lens cleaning operation after receiving the cleaning instruction, and the lens cleaning unit includes a sleeve 3, and the sleeve 3 is fixedly installed on one side of the camera 2, and the sleeve 3 is coaxially provided with Transmission gear ring 4, the transmission gear ring 4 is rotationally connected with the sleeve 3, several transmission gears 5 are arranged at an equal angle on the inside of the transmission gear ring 4, and several transmission gears 5 are all connected to the sleeve through pin shafts. 3 Rotation connection, the transmission gear 5 is connected with the transmission gear ring 4 through gear teeth meshing, the end of the pin shaft away from the transmission gear 5 is fixedly connected with the movable block 6, and several movable blocks 6 cooperate with each other, and the movable block 6 One side surface is equipped with sponge 7, and the side surface of described sponge 7 is in contact with the lens surface of camera 2, and the side of described movable block 6 offers a row of alcohol spraying holes and a row of air-drying holes, and described alcohol spraying holes and air-drying holes They are respectively arranged on both sides of the sponge 7, and the side of the sleeve 3 away from the transmission gear 5 is provided with a miniature rotary cylinder, and the end of the piston rod of the micromotor is fixedly connected with a transmission gear 5 through a pin shaft.
所述数据分析单元进行障碍物存在性分析的具体步骤如下:The specific steps for the data analysis unit to analyze the existence of obstacles are as follows:
步骤一:将发射时间数据标记为FTi,将接收时间数据标记为STi,其中,i表示雷达波的发送次数序号,i=1,2,3……n1;Step 1: mark the launch time data as FTi, and mark the reception time data as STi, wherein, i represents the number of sending times of radar waves, i=1, 2, 3...n1;
步骤二:数据分析单元中预设有一个存在界定时间数据并将其标记为CTs,将接收时间数据与发射时间数据代入到计算式:时间间隔数据=接收时间数据-发射时间数据,得到时间间隔数据并将其标记为GTi;Step 2: In the data analysis unit, there is preset time data for existence and definition, and it is marked as CTs, and the receiving time data and the transmitting time data are substituted into the calculation formula: time interval data=receiving time data-transmitting time data, and the time interval is obtained data and label it as GTi;
步骤三:将时间间隔数据与存在界定时间数据进行比对,当时间间隔数据大于存在限定时间数据时,判定电机车行驶方向上不存在障碍物,生成无障碍信号,当时间间隔数据小于等于存在限定时间数据时,判定电机车行驶方向存在障碍,同时进行步骤四;Step 3: Compare the time interval data with the existence limit time data. When the time interval data is greater than the existence limit time data, it is determined that there is no obstacle in the driving direction of the electric locomotive, and an obstacle-free signal is generated. When the time interval data is less than or equal to the existence When the time data is limited, it is determined that there is an obstacle in the driving direction of the electric locomotive, and
步骤四:从数据存储单元中提取行驶线路图,数据分析单元通过GPS定位获取电机车的实时位置数据,并根据实时位置数据在行驶线路图中进行位置标记,并通过测算行驶线路图中电机车的位置标记与行驶方向上下一个弯道之间的长度,将该长度标记为测算长度数据,将测算长度数据代入到计算式:实际长度数据=测算长度数据/比例尺,得到实际长度数据并将其标记为SC;Step 4: Extract the driving route map from the data storage unit, the data analysis unit obtains the real-time position data of the electric locomotive through GPS positioning, and marks the position in the driving route map according to the real-time position data, and calculates the electric locomotive in the driving route map The length between the position mark of the position mark and the next curve in the driving direction, the length is marked as the measured length data, and the measured length data is substituted into the calculation formula: actual length data=measured length data/scale, the actual length data is obtained and marked SC;
步骤五:数据分析单元中预设有弯道认定距离,当实际长度数据小于弯道认定距离,判定该障碍物为矿道侧壁,生成弯道信号,当实际长度数据大于等于弯道认定数据时,判定障碍物为轨道障碍物,生成障碍确认信号。Step 5: The data analysis unit presets the curve identification distance. When the actual length data is less than the curve identification distance, it is determined that the obstacle is the side wall of the mine road and a curve signal is generated. When the actual length data is greater than or equal to the curve identification data , it is determined that the obstacle is a track obstacle, and an obstacle confirmation signal is generated.
所述障碍物特征分析的具体步骤如下:The specific steps of the obstacle feature analysis are as follows:
S31:将接收到的障碍物图像数据标记为TXj,其中,j表示连续拍摄中各个时刻的图像标号,j=1,2,3……n2,从数据存储单元中获取轨道规格数据并将其内的轨道宽度标记为轨道宽度数据KD,将其内的轨道高度标记为轨道高度数据GD;S31: Mark the received obstacle image data as TXj, where j represents the image label at each moment in the continuous shooting, j=1, 2, 3...n2, acquire the track specification data from the data storage unit and save it The track width in is marked as track width data KD, and the track height in it is marked as track height data GD;
S32:对多个障碍物影像数据进行识别,当在障碍物影像数据中识别到轨道特征影像时,选取该障碍物影像数据,并将轨道作为参照物,并将轨道宽度数据和轨道高度数据代入到OpenCV算法中,得到障碍物的障碍宽度数据和障碍高度数据,数据分析单元中预设有宽度限定数据和高度限定数据,当障碍宽度数据大于等于宽度限定数据或障碍高度数据大于等于高度限定数据时,判定电机车无法顺利通行,生成减速信号并进入步骤S33,当障碍宽度数据小于宽度限定数据且障碍高度数据小于高度限定数据时,判定电机车能够顺利通行,不进行任何处理;S32: Identify a plurality of obstacle image data, when the track feature image is identified in the obstacle image data, select the obstacle image data, use the track as a reference object, and substitute the track width data and track height data into In the OpenCV algorithm, the obstacle width data and the obstacle height data of the obstacle are obtained. The data analysis unit is preset with the width limit data and the height limit data. When the obstacle width data is greater than or equal to the width limit data or the obstacle height data is greater than or equal to the height limit data , it is determined that the electric locomotive cannot pass smoothly, and a deceleration signal is generated and enters step S33. When the obstacle width data is less than the width limit data and the obstacle height data is less than the height limit data, it is determined that the electric locomotive can pass smoothly, and no processing is performed;
S33:对多个相邻时刻的障碍物图像数据中的特征影像进行提取,所述特征影像表示除去环境背景的障碍物本体影像,将多个特征影像进行差异性比对,当多个特征影像均完全相同时,判定该障碍物的固定障碍物,生成停车信号,当多个特征影像的状态不一致时,判定该障碍物为活动障碍物,生成驱离信号。S33: Extract the feature images in the obstacle image data at multiple adjacent times, the feature images represent the obstacle body images without the environmental background, compare the differences of the multiple feature images, when the multiple feature images If they are all the same, it is determined that the obstacle is a fixed obstacle, and a stop signal is generated; when the states of multiple feature images are inconsistent, it is determined that the obstacle is a moving obstacle, and a drive-away signal is generated.
所述镜头清理单元进行镜头清理操作的具体为:The specific lens cleaning operation performed by the lens cleaning unit is as follows:
当识别到清理指令时,活动块6侧面设置的酒精喷洒孔对镜头表面进行酒精喷洒,同时启动微型旋转气缸进行往复旋转,从而带动与微型旋转气缸的活塞杆端部固定连接的传动齿轮5往复转动,通过轮齿的啮合传动,带动传动齿环4发生往复转动,进而使其他的传动齿轮5往复转动,同时带动活动块6绕销轴往复运动,对镜头表面进行清理,同时从风干孔内吹出热风对镜头表面进行干燥,完成镜头的清理,在摄像头2不使用时,若干个活动块6呈相互接触配合状态,在摄像头2使用时,若干个活动块6呈相互分离状态。When the cleaning instruction is recognized, the alcohol spray hole provided on the side of the
工作原理:本发明在使用时,首先,数据采集单元中的雷达1发送雷达电波和接收雷达电波,摄像头2对车辆行驶方向上出现的障碍物进行拍摄,雷达1将采集到的发射时间数据和接收时间数据发送至数据分析单元,数据分析单元通过对发射时间数据和接收时间数据进行障碍物存在性分析,并将得到的无障碍信号和弯道信号发送至数据处理单元,将得到的障碍确认信号发送至数据采集单元,数据采集单元识别到障碍确认信号后,开启摄像头2对行驶方向上的障碍物进行连续拍摄,生成障碍物图像数据并将其传送至数据分析单元进行障碍物特征分析,并将得到减速信号、停车信号和驱离信号传输至数据处理单元;数据采集单元还对采集到的障碍物图像数据进行清晰度检测,将障碍物图像数据均分为若干个单元格,并对各单元格内的杂质点进行记录并杂质点密度数据,数据采集单元中预设有杂质点密度限值,当任意单元格内的杂质点密度数据大于等于杂质点密度限值时,判定摄像头2的镜头玻璃不清晰,生成清理信号并传输至数据处理单元,当任意单元格内的杂质点密度数据小于杂质点密度限值时,不进行任何处理;数据处理单元接收到无障碍信号、弯道信号、减速信号、停车信号和驱离信号并进行识别,当识别到无障碍信号时,不进行任何处理,当识别到弯道信号时,向驱动控制单元发出减速和警示指令,当识别到减速信号时,向驱动控制单元发出减速指令,当识别到停车信号时,向驱动控制单元发出刹车指令,当识别到驱离信号时,向驱动控制单元发出鸣笛指令,当识别到清理信号时,向镜头清理单元发出清理指令;驱动控制单元接收减速指令时,进行降档减速,接收到警示指令时,进行单次鸣笛,接收到刹车指令时,进行刹车直至速度降为零,接收到鸣笛指令时,进行连续鸣笛,持续五秒;镜头清理单元接收到清理指令后进行镜头清理操作,识别到清理指令时,活动块6侧面设置的酒精喷洒孔对镜头表面进行酒精喷洒,同时启动微型旋转气缸进行往复旋转,从而带动与微型旋转气缸的活塞杆端部固定连接的传动齿轮5往复转动,通过轮齿的啮合传动,带动传动齿环4发生往复转动,进而使其他的传动齿轮5往复转动,同时带动活动块6绕销轴往复运动,对镜头表面进行清理,同时从风干孔内吹出热风对镜头表面进行干燥,完成镜头的清理,在摄像头2不使用时,若干个活动块6呈相互接触配合状态,在摄像头2使用时,若干个活动块6呈相互分离状态。Working principle: when the present invention is in use, at first, the
在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能理解为对本发明的限制。此外,“第一”、“第二”仅由于描述目的,且不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。In the description of the present invention, it should be understood that the terms "upper", "lower", "left", "right", etc. indicating orientation or positional relationship are based on the orientation or positional relationship shown in the drawings, and are only for convenience The present invention is described and the simplified description does not indicate or imply that the device or element referred to must have a specific orientation, as well as a specific orientation configuration and operation, and therefore, should not be construed as limiting the present invention. In addition, "first" and "second" are for descriptive purposes only, and cannot be interpreted as indicating or implying relative importance or implicitly specifying the quantity of the indicated technical features. Therefore, a feature defined as "first" and "second" may explicitly or implicitly include one or more of these features. In the description of the present invention, unless otherwise specified, "plurality" means two or more.
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。In the description of the present invention, it should be noted that unless otherwise specified and limited, the terms "installation", "connection" and "connection" should be understood in a broad sense, for example, it can be a fixed connection or a detachable connection , or integrally connected; it may be mechanically connected or electrically connected; it may be directly connected or indirectly connected through an intermediary, and it may be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention in specific situations. An embodiment of the present invention has been described in detail above, but the content described is only a preferred embodiment of the present invention, and cannot be considered as limiting the implementation scope of the present invention. All equivalent changes and improvements made according to the application scope of the present invention shall still belong to the scope covered by the patent of the present invention.
Claims (3)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011544281.9ACN112698352B (en) | 2020-12-23 | 2020-12-23 | An obstacle recognition device for electric locomotives |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011544281.9ACN112698352B (en) | 2020-12-23 | 2020-12-23 | An obstacle recognition device for electric locomotives |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112698352A CN112698352A (en) | 2021-04-23 |
| CN112698352Btrue CN112698352B (en) | 2022-11-22 |
Family
ID=75509481
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011544281.9AActiveCN112698352B (en) | 2020-12-23 | 2020-12-23 | An obstacle recognition device for electric locomotives |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112698352B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114155416A (en)* | 2021-11-23 | 2022-03-08 | 北京铁科时代科技有限公司 | Track Curve Obstacle Detection Method |
| CN114999157A (en)* | 2022-05-27 | 2022-09-02 | 宁波均联智行科技股份有限公司 | Parking fee automatic payment method and vehicle-mounted machine system |
| CN116206457A (en)* | 2022-09-19 | 2023-06-02 | 仓擎智能科技(上海)有限公司 | Traffic intelligent management system and method based on sensing equipment |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102616198A (en)* | 2012-04-27 | 2012-08-01 | 湖南赛格导航技术研究有限公司 | Active safety control method and device for automobile based on millimeter wave radar detection and image recognition |
| EP3048559A1 (en)* | 2015-01-21 | 2016-07-27 | RindInvest AB | Method and system for detecting a rail track |
| WO2018077040A1 (en)* | 2016-10-31 | 2018-05-03 | 赵福林 | Motor vehicle driver assistance camera capable of self-cleaning |
| CN108416257A (en)* | 2018-01-19 | 2018-08-17 | 北京交通大学 | Merge the underground railway track obstacle detection method of vision and laser radar data feature |
| CN108482427A (en)* | 2018-02-22 | 2018-09-04 | 中车长春轨道客车股份有限公司 | A kind of contactless rail vehicle obstacle detection system and method for controlling security |
| CN109001743A (en)* | 2018-09-06 | 2018-12-14 | 中国铁道科学研究院集团有限公司通信信号研究所 | Tramcar anti-collision system |
| CN109120824A (en)* | 2018-09-19 | 2019-01-01 | 深圳市晓控通信科技有限公司 | A kind of camera with dust reduction capability based on block chain technology |
| JP2019008431A (en)* | 2017-06-22 | 2019-01-17 | 株式会社日立製作所 | Route search apparatus and route search method |
| CN109552366A (en)* | 2018-12-24 | 2019-04-02 | 西安思科赛德电子科技有限公司 | Locomotive vehicle-mounted railway barrier intelligent detecting alarm system and its method for early warning |
| CN110471085A (en)* | 2019-09-04 | 2019-11-19 | 深圳市镭神智能系统有限公司 | A kind of rail detection system |
| CN110705358A (en)* | 2019-09-03 | 2020-01-17 | 陕西九域通创轨道系统技术有限责任公司 | Tunnel scene control decision method of train AEB system |
| CN110789574A (en)* | 2019-11-07 | 2020-02-14 | 北京杰迈科技股份有限公司 | Train barrier detection and comprehensive early warning protection system |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005045017A1 (en)* | 2005-09-21 | 2007-03-22 | Robert Bosch Gmbh | Method and driver assistance system for sensor-based approach control of a motor vehicle |
| EP3027482B1 (en)* | 2013-07-31 | 2021-09-15 | Rail Vision Ltd | System and method for obstacle identification and avoidance |
| US20170313288A1 (en)* | 2016-04-14 | 2017-11-02 | Ford Global Technologies, Llc | Exterior vehicle camera protection and cleaning mechanisms |
- 2020
- 2020-12-23CNCN202011544281.9Apatent/CN112698352B/enactiveActive
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102616198A (en)* | 2012-04-27 | 2012-08-01 | 湖南赛格导航技术研究有限公司 | Active safety control method and device for automobile based on millimeter wave radar detection and image recognition |
| EP3048559A1 (en)* | 2015-01-21 | 2016-07-27 | RindInvest AB | Method and system for detecting a rail track |
| WO2018077040A1 (en)* | 2016-10-31 | 2018-05-03 | 赵福林 | Motor vehicle driver assistance camera capable of self-cleaning |
| JP2019008431A (en)* | 2017-06-22 | 2019-01-17 | 株式会社日立製作所 | Route search apparatus and route search method |
| CN108416257A (en)* | 2018-01-19 | 2018-08-17 | 北京交通大学 | Merge the underground railway track obstacle detection method of vision and laser radar data feature |
| CN108482427A (en)* | 2018-02-22 | 2018-09-04 | 中车长春轨道客车股份有限公司 | A kind of contactless rail vehicle obstacle detection system and method for controlling security |
| CN109001743A (en)* | 2018-09-06 | 2018-12-14 | 中国铁道科学研究院集团有限公司通信信号研究所 | Tramcar anti-collision system |
| CN109120824A (en)* | 2018-09-19 | 2019-01-01 | 深圳市晓控通信科技有限公司 | A kind of camera with dust reduction capability based on block chain technology |
| CN109552366A (en)* | 2018-12-24 | 2019-04-02 | 西安思科赛德电子科技有限公司 | Locomotive vehicle-mounted railway barrier intelligent detecting alarm system and its method for early warning |
| CN110705358A (en)* | 2019-09-03 | 2020-01-17 | 陕西九域通创轨道系统技术有限责任公司 | Tunnel scene control decision method of train AEB system |
| CN110471085A (en)* | 2019-09-04 | 2019-11-19 | 深圳市镭神智能系统有限公司 | A kind of rail detection system |
| CN110789574A (en)* | 2019-11-07 | 2020-02-14 | 北京杰迈科技股份有限公司 | Train barrier detection and comprehensive early warning protection system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112698352A (en) | 2021-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112698352B (en) | An obstacle recognition device for electric locomotives | |
| CN109828581B (en) | Multi-mode intelligent electric sweeper with automatic driving system | |
| CN110471085B (en) | Track detecting system | |
| CN105946853B (en) | The system and method for long range automatic parking based on Multi-sensor Fusion | |
| CN104699102B (en) | A kind of unmanned plane and intelligent vehicle collaborative navigation and investigation monitoring system and method | |
| CN103194991B (en) | Intelligent robot road cleaning system and method for cleaning | |
| CN107817509A (en) | Crusing robot navigation system and method based on the RTK Big Dippeves and laser radar | |
| CN112731922A (en) | Unmanned aerial vehicle auxiliary intelligent vehicle driving method and system based on indoor positioning | |
| CN111796299A (en) | An obstacle perception method, perception device and driverless sweeper | |
| CN104369742A (en) | Image-processing-based fast intelligent detection vehicle for tunnel surface cracks | |
| CN208224845U (en) | A kind of unmanned vehicle navigation system of omnibearing visual angle | |
| CN114290313B (en) | Inspection robot, automatic navigation inspection robot system and control method | |
| CN107190696A (en) | Full-automatic snowplough | |
| CN114397672A (en) | Train active obstacle detection method and device based on positioning technology | |
| JP3448088B2 (en) | Obstacle detection system | |
| CN110696016A (en) | Intelligent robot suitable for subway vehicle train inspection work | |
| CN112684784A (en) | Low-speed unmanned driving system | |
| CN115326819A (en) | A device for detecting apparent disease of rail transit tunnel structure | |
| CN211454366U (en) | Joint target search system based on unmanned aerial vehicle-unmanned vehicle | |
| CN212497791U (en) | An orbital fog detection robot | |
| CN107957726A (en) | Unmanned vehicle navigation system | |
| CN114162317B (en) | An airport foreign body monitoring system | |
| CN108303985A (en) | A kind of unmanned transport vehicle system in garden | |
| CN113835436A (en) | Articulated cleaning robot and cleaning system thereof | |
| CN207032136U (en) | Full-automatic snowplough |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | Denomination of invention:An obstacle recognition device for electric locomotives Granted publication date:20221122 Pledgee:Industrial and Commercial Bank of China Limited Huaibei Huaihai Road sub branch Pledgor:HUAIBEI XIANGTAI SCIENCE AND TECHNOLOGY Co.,Ltd. Registration number:Y2024980028127 | |
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PC01 | Cancellation of the registration of the contract for pledge of patent right | Granted publication date:20221122 Pledgee:Industrial and Commercial Bank of China Limited Huaibei Huaihai Road sub branch Pledgor:HUAIBEI XIANGTAI SCIENCE AND TECHNOLOGY Co.,Ltd. Registration number:Y2024980028127 | |
| PC01 | Cancellation of the registration of the contract for pledge of patent right |