CN112543272B - Transformer substation inspection camera device with light regulation function and method - Google Patents
Transformer substation inspection camera device with light regulation function and methodDownload PDFInfo
- Publication number
- CN112543272B CN112543272BCN202011418710.8ACN202011418710ACN112543272BCN 112543272 BCN112543272 BCN 112543272BCN 202011418710 ACN202011418710 ACN 202011418710ACN 112543272 BCN112543272 BCN 112543272B
- Authority
- CN
- China
- Prior art keywords
- inspection
- camera
- dimensional
- substation
- image pixel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
- F16M13/02—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles for supporting on, or attaching to, an object, e.g. tree, gate, window-frame, cycle
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/08—Projecting images onto non-planar surfaces, e.g. geodetic screens
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Mechanical Engineering (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Evolutionary Computation (AREA)
- Evolutionary Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Artificial Intelligence (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Processing (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及变电站巡检领域,具体涉及一种具有光线调节的变电站巡检摄像装置及方法。The invention relates to the field of substation inspection, in particular to a substation inspection camera device and method with light adjustment.
背景技术Background technique
随着世界电网的进步,尤其是当智能电网的概念被提出后,世界范围内关于如何提升电网的安全性、效率和稳定性成为争相研究的热点。变电站作为电网设备使用的集中点和关键点,确保变电站的智能化、安全化运行关系到企业的生产和人民的正常生活。目前变电站进行日常检查与维护大多采用人工巡检的方式,然而这种方式需定期、定时的检查相应设备与记录数据,然后依据经验进行判别处理。这就需要工作人员进行重复性的工作,容易使员工产生厌烦情绪,不利于工作的展开,同时设备的检查多为依靠感官上的简单分析和定性,用触觉感知设备的升温和振动情况,利用听觉检测是否有杂音,用嗅觉检查是否有异味,在正常天气或许记录与观察的数据较为准确,但在极端天气下如下雨、刮风、暴雪等气候条件下,存在着危险度高、困难度大、误检漏检等事件频繁发生。With the progress of the world power grid, especially when the concept of smart grid is put forward, how to improve the security, efficiency and stability of the power grid has become a hot research topic worldwide. As the centralized and key point for the use of power grid equipment, the substation ensures the intelligent and safe operation of the substation is related to the production of the enterprise and the normal life of the people. At present, the daily inspection and maintenance of substations are mostly carried out by manual inspection. However, this method requires regular and regular inspection of the corresponding equipment and recorded data, and then judges and handles according to experience. This requires the staff to perform repetitive work, which is easy to make the staff feel bored, which is not conducive to the development of the work. At the same time, the inspection of the equipment mostly relies on simple analysis and characterization of the senses, and uses the touch to perceive the heating and vibration of the equipment. Auditory detection for noise and smell to check for peculiar smell. In normal weather, the data recorded and observed may be more accurate, but in extreme weather such as rain, wind, blizzard and other climatic conditions, there is a high degree of danger and difficulty. Incidents such as large, false detection and missed detection occur frequently.
变电站的检测工作大致一般分为厂房内设备的检测和厂房外设备的检测,而不管是设备的检测和厂房外设备的检测由于针对环境变化较大,比如厂房外的光照一般比厂区内的光照强,因此针对不同区域的巡检工作,需要对摄像设备进行调节,防止因为成像效果出现耀斑、光晕等现象,影响正常的巡检工作。The inspection work of the substation is generally divided into the inspection of the equipment in the factory building and the inspection of the equipment outside the factory building. Whether it is the inspection of the equipment and the inspection of the equipment outside the factory building, due to the large changes in the environment, for example, the light outside the factory building is generally higher than that in the factory. Therefore, for the inspection work in different areas, the camera equipment needs to be adjusted to prevent flare, halo and other phenomena due to the imaging effect, which will affect the normal inspection work.
有鉴于此,本发明厂房外和厂房内的不同区域的巡检检测,提出一种具有光线调节的变电站巡检摄像装置及方法,保证完成变电站内的检测工作。In view of this, the present invention provides a patrol inspection camera device and method for substation inspection with light adjustment for inspection and detection of different areas outside and inside the factory building, so as to ensure the completion of inspection work in the substation.
发明内容SUMMARY OF THE INVENTION
本发明的目的在于针对现有技术的不足,提供一种具有光线调节的变电站巡检摄像装置及方法。The purpose of the present invention is to provide a substation inspection camera device and method with light adjustment in view of the deficiencies of the prior art.
为了解决上述技术问题,采用如下技术方案:In order to solve the above technical problems, the following technical solutions are adopted:
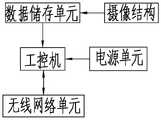
一种具有光线调节的变电站巡检摄像装置,包括摄像结构、数据储存单元、工控机、无线网络单元以及电源单元,其特征在于:摄像结构的输出端与数据储存单元的输入端相连接,数据储存单元的输出端与工控机的主控系统相连接,主控系统与无线网络单元双向数据连接,电源模块输出端与主控系统的输入端相连接;A substation inspection camera device with light adjustment, comprising a camera structure, a data storage unit, an industrial computer, a wireless network unit and a power supply unit, characterized in that the output end of the camera structure is connected with the input end of the data storage unit, and the data The output end of the storage unit is connected with the main control system of the industrial computer, the main control system is connected with the wireless network unit for bidirectional data connection, and the output end of the power module is connected with the input end of the main control system;
摄像结构包括传感器组件、补光灯模块和可调节的摄像设备,摄像设备的下方设有摄像头调节模块,传感器组件的输出端与摄像设备的输入端相连接,补光灯模块的输出端与摄像设备的输入端相连接,摄像设备的输出端与数据储存单元相连接。The camera structure includes a sensor component, a fill light module and an adjustable camera device. A camera adjustment module is arranged below the camera device. The output end of the sensor component is connected to the input end of the camera device, and the output end of the fill light module is connected to the camera. The input end of the device is connected, and the output end of the camera device is connected with the data storage unit.
进一步,传感器组件包括光敏传感器、雷达避障传感器、姿态传感器、红外测距传感器、温湿度传感器和传感器采集模块,光敏传感器、雷达避障传感器、姿态传感器、红外测距传感器、温湿度传感器均与传感器采集模块相连接,传感器采集模块连接主控系统。Further, the sensor components include a photosensitive sensor, a radar obstacle avoidance sensor, an attitude sensor, an infrared ranging sensor, a temperature and humidity sensor, and a sensor acquisition module. The sensor acquisition module is connected with each other, and the sensor acquisition module is connected with the main control system.
进一步,摄像头调节模块包括升降调节组件、水平调节组件和俯仰调节组件,摄像设备的下部连接有俯仰调节组件,俯仰调节组件的下部连接有水平调节组件,水平调节组件的下部连接有升降调节组件,升降调节组件设置于巡检机器人上。Further, the camera adjustment module includes a lift adjustment assembly, a horizontal adjustment assembly and a pitch adjustment assembly, a pitch adjustment assembly is connected to the lower part of the camera device, a horizontal adjustment assembly is connected to the lower part of the pitch adjustment assembly, and a lift adjustment assembly is connected to the lower part of the horizontal adjustment assembly, The lift adjustment assembly is arranged on the inspection robot.
进一步,升降调节组件用于调节摄像设备的竖直升降,对摄像设备进行竖直方向上的调节;Further, the lift adjustment component is used to adjust the vertical lift of the camera equipment, and to adjust the camera equipment in the vertical direction;
水平调节组件用于调节摄像设备的水平面内的调节,对摄像设备进行水平面内的旋转调节;The horizontal adjustment component is used to adjust the adjustment in the horizontal plane of the imaging device, and perform the rotation adjustment in the horizontal plane of the imaging device;
俯仰调节组件用于调节摄像设备的俯仰调节,对摄像设备的镜头进行俯仰调节。The pitch adjustment component is used to adjust the pitch adjustment of the imaging device, and perform pitch adjustment for the lens of the imaging device.
进一步,摄像设备为双目CCD摄像机或者双目CMOS摄像机。Further, the imaging device is a binocular CCD camera or a binocular CMOS camera.
进一步,无线网络单元为WiFi装置或蓝牙装置中的任意一种或两种,用于与网络通道进行通讯。Further, the wireless network unit is any one or both of a WiFi device or a Bluetooth device, and is used to communicate with the network channel.
进一步,电源单元包括无线充电装置和蓄电池系统,无线充电装置与蓄电池系统相连,无线充电装置从变电站接收到的交流电整流转变为直流电并传递给蓄电池系统,蓄电池系统为工控机提供电能。Further, the power supply unit includes a wireless charging device and a battery system. The wireless charging device is connected to the battery system. The wireless charging device rectifies the AC power received from the substation and converts it into DC power and transmits it to the battery system. The battery system provides electrical energy for the industrial computer.
一种具有光线调节的变电站巡检摄像装置的巡检方法,包括以下步骤:An inspection method for a substation inspection camera device with light adjustment, comprising the following steps:
(1)巡检机器人接收到巡检命令后,通过行走机构行走至待巡检的位置,为巡检工作做准备;(1) After the inspection robot receives the inspection command, it walks to the position to be inspected through the walking mechanism to prepare for the inspection work;
(2)先对摄像结构进行调试工作,确保摄像设备、传感器组件和补光灯模块正常工作;然后通过传感器组件检测光线角度和强度,由主控系统根据光线角度和强度的检测结果,通过摄像头调节模块带动摄像设备的偏振镜旋转,调整偏振镜角度过滤强光,拍摄巡检区域的变电站巡检视频流;(2) Debug the camera structure first to ensure the normal operation of the camera equipment, sensor components and fill light module; then detect the light angle and intensity through the sensor component, and the main control system will pass the camera according to the detection results of the light angle and intensity. The adjustment module drives the polarizer of the camera equipment to rotate, adjusts the angle of the polarizer to filter the strong light, and shoots the substation inspection video stream in the inspection area;
(3)通过主控系统对拍摄的变电站巡检视频流进行初步处理,截取有效的T1至T2的变电站巡检视频流;(3) Preliminarily process the captured substation inspection video stream through the main control system, and intercept the effective substation inspection video stream from T1 to T2;
(4)根据有效的T1至T2时间段的变电站巡检视频流,截取每一帧的二维图像信息,形成摄像设备拍摄的有效的T1至T2时间段的变电站巡检视频流的二维图像像素点,二维图像像素点g为(x,y,n),其中x为选取的摄像系统的二维图像像素点横坐标,y为选取的摄像系统的二维图像像素点纵坐标,n取值为1、2、3……n,表示为第n帧的二维图像信息;(4) According to the valid substation inspection video stream in the time period from T1 to T2, intercept the two-dimensional image information of each frame to form a two-dimensional image of the substation inspection video stream in the effective T1 to T2 time period captured by the camera equipment Pixel point, the two-dimensional image pixel point g is (x, y, n), where x is the abscissa of the two-dimensional image pixel point of the selected camera system, y is the ordinate of the two-dimensional image pixel point of the selected camera system, n The value is 1, 2, 3...n, which is expressed as the two-dimensional image information of the nth frame;
(5)将二维图像像素点为g(x,y,n)转化为全局环境三维特征的图像像素点为G(X,Y,Z),G(X,Y,Z)=(x,y,n)*P,

(6)根据得到的全局环境三维特征的图像像素点G(X,Y,Z),提取得到需要巡检区域的变电站三维全景图像信息,并对需要巡检区域的变电站三维全景图像信息进行卷积和反卷积处理,得到最终的需要巡检区域的巡检目标物图像三维图像信息M(X,Y,Z),将巡检目标物图像三维图像信息M(X,Y,Z)与数据储存单元中存储的巡检目标物图像N(X,Y,Z)进行比较,得到匹配相似性u值,计算阀值
进一步,主控系统检测光线强度方法如下:通过摄像设备拍摄图像,得到该光线强度状态下的图像熵,图像熵定义为
其中L=256,L为RGB颜色值的离散化级数,Pr、Pg、Pb分别为RGB颜色分量值r、g、b在图像中出现的概率;Where L=256, L is the discretization series of RGB color values, Pr, Pg, and Pb are the probabilities of RGB color component values r, g, and b appearing in the image, respectively;
通过摄像头调节模块调整摄像设备的镜头角度和位置,得到该光线强度状态下的最大的图像熵,从而通过偏振镜角度过滤强光,拍摄下该巡检区域的变电站巡检视频流。Adjust the lens angle and position of the camera device through the camera adjustment module to obtain the maximum image entropy under the light intensity state, so as to filter the strong light through the angle of the polarizer, and shoot the substation inspection video stream in the inspection area.
由于采用上述技术方案,具有以下有益效果:Due to the adoption of the above technical solution, the following beneficial effects are obtained:
本发明为一种具有光线调节的变电站巡检摄像装置及方法,本发明结构上通过设置可进行升降调节、水平调节和俯仰调节的摄像设备,通过传感器组件检测光线角度和强度,由主控系统根据光线角度和强度的检测结果,由摄像头调节模块调整摄像设备的镜头角度和位置,即通过摄像头调节模块带动摄像设备的偏振镜旋转,调整偏振镜角度过滤强光,从而避免成像效果出现耀斑、光晕等现象,从而拍摄该巡检区域的变电站巡检视频流。进一步地,通过将拍摄到的变电站巡检视频流截取到有效片段的变电站巡检视频流,并截取变电站巡检视频流每一帧的二维图像信息,形成由n帧组成的二维图像像素点g为(x,y,n)。进而通过将二维图像像素点为g(x,y,n)转化为全局环境三维特征的图像像素点为G(X,Y,Z),方便将由n帧组成的二维图像像素点g为(x,y,n)变成能够显现三维特征的图像。然后提取得到需要巡检区域的变电站三维全景图像信息,并对需要巡检区域的变电站三维全景图像信息进行卷积和反卷积处理,得到最终的需要巡检区域的巡检目标物图像三维图像信息M(X,Y,Z)。最后将巡检目标物图像三维图像信息M(X,Y,Z)与数据储存单元中存储的巡检目标物图像N(X,Y,Z)进行比较,如果符合标准则进行下一巡检区域的巡检工作,如果不符合标准则通知日常维护工作人员进行维护或者维修处理,同过展现巡检目标物图像的三维图像信息,真实的展示出变电站内各设备的运行状态,以及设备操作控制后的实时变化。除此之外,该巡检方法不需要人为参与巡检,针对变电站厂房内部和外部均可以进行日常巡检,极大地提高了巡检效率,且可在高温等恶劣环境下工作、降低人工成本,历史数据可追溯、可横向或纵向对数据进行对比,提前发现故障问题,起到预防危险的作用,对智能电网的实现做出卓越的贡献。The invention is a substation inspection camera device and method with light adjustment. In the structure of the invention, a camera device capable of lifting adjustment, horizontal adjustment and pitch adjustment is provided, the angle and intensity of the light are detected by the sensor component, and the main control system According to the detection results of the light angle and intensity, the camera adjustment module adjusts the lens angle and position of the camera device, that is, the camera adjustment module drives the polarizer of the camera device to rotate, and adjusts the angle of the polarizer to filter the strong light, so as to avoid the imaging effect of flare, Halo and other phenomena, so as to shoot the substation inspection video stream in the inspection area. Further, by intercepting the photographed substation inspection video stream into a substation inspection video stream of a valid segment, and intercepting the two-dimensional image information of each frame of the substation inspection video stream, a two-dimensional image pixel composed of n frames is formed. Point g is (x, y, n). Then, by converting the two-dimensional image pixel point g(x, y, n) into the image pixel point of the three-dimensional feature of the global environment as G(X, Y, Z), it is convenient to convert the two-dimensional image pixel point g composed of n frames as (x, y, n) becomes an image capable of expressing three-dimensional features. Then extract the 3D panoramic image information of the substation in the area that needs to be inspected, and perform convolution and deconvolution on the 3D panoramic image information of the substation in the area that needs to be inspected to obtain the final 3D image of the inspection target image in the area that needs to be inspected. Information M(X,Y,Z). Finally, compare the three-dimensional image information M (X, Y, Z) of the inspection target image with the inspection target image N (X, Y, Z) stored in the data storage unit, and if it meets the standard, perform the next inspection If the inspection work in the area does not meet the standards, the daily maintenance staff will be notified to carry out maintenance or repair processing. At the same time, the three-dimensional image information of the image of the inspection target will be displayed, and the operation status of each equipment in the substation and the operation of the equipment will be truly displayed. Real-time changes after control. In addition, this inspection method does not require human participation in inspections. Daily inspections can be carried out both inside and outside the substation plant, which greatly improves inspection efficiency, and can work in harsh environments such as high temperature, reducing labor costs. , the historical data can be traced back, the data can be compared horizontally or vertically, the fault problem can be detected in advance, it plays a role in preventing danger, and makes an outstanding contribution to the realization of the smart grid.
附图说明Description of drawings
下面结合附图对本发明作进一步说明:The present invention will be further described below in conjunction with the accompanying drawings:
图1为本发明中一种具有光线调节的变电站巡检摄像装置的结构示意图;1 is a schematic structural diagram of a substation inspection camera device with light adjustment in the present invention;
图2为本发明中摄像结构的结构示意图;2 is a schematic structural diagram of a camera structure in the present invention;
图3为本发明中传感器组件的结构示意图;3 is a schematic structural diagram of a sensor assembly in the present invention;
图4为本发明中摄像头调节模块的视结构示意图;4 is a schematic view of the structure of a camera adjustment module in the present invention;
图5为本发明中电源单元的结构示意图。FIG. 5 is a schematic structural diagram of a power supply unit in the present invention.
具体实施方式Detailed ways
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below through the accompanying drawings and embodiments. However, it should be understood that the specific embodiments described herein are only used to explain the present invention, and not to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concepts of the present invention.
如图1所示,一种具有光线调节的变电站巡检摄像装置,包括摄像结构、数据储存单元、工控机、无线网络单元以及电源单元,其特征在于:摄像结构的输出端与数据储存单元的输入端相连接,数据储存单元的输出端与工控机的主控系统相连接,主控系统与无线网络单元双向数据连接,电源模块输出端与主控系统的输入端相连接。As shown in Figure 1, a substation inspection camera device with light adjustment includes a camera structure, a data storage unit, an industrial computer, a wireless network unit and a power supply unit, and is characterized in that: the output end of the camera structure and the data storage unit are The input end is connected, the output end of the data storage unit is connected with the main control system of the industrial computer, the main control system and the wireless network unit are bidirectionally connected for data, and the output end of the power module is connected with the input end of the main control system.
摄像结构用于拍摄巡检区域的视频流信息,并将该信息传输给工控机的主控系统进行图像处理,方便真实的展示出变电站内各设备的运行状态,以及设备操作控制后的实时变化。一旦发生意外情况,可及时通知日常维护人员进行处理,提前发现故障问题,起到预防危险的作用。The camera structure is used to capture the video stream information of the inspection area, and transmit the information to the main control system of the industrial computer for image processing, which is convenient to truly display the operating status of each equipment in the substation and the real-time changes after the equipment is operated and controlled. . Once an accident occurs, the daily maintenance personnel can be notified in time to deal with it, and the fault can be found in advance to prevent danger.
数据储存单元:一方面用于存储以前的正常的巡检目标物的信息,方便与每次的日常巡检的变电站图像进行比对和分析,为每次的巡检做数据信息上的参考;另一方面用于用于存储每次巡检的日常数据,使历史数据可追溯,可横向或纵向对数据进行对比。Data storage unit: On the one hand, it is used to store the information of the previous normal inspection targets, which is convenient for comparison and analysis with the substation images of each daily inspection, and makes reference to the data information for each inspection; On the other hand, it is used to store the daily data of each inspection, so that the historical data can be traced back, and the data can be compared horizontally or vertically.
工控机是整个巡检系统的数据接收、处理、显示和储存中心,实现对变电站设备的自动识别、巡检和报警;主控系统用于控制巡检机器人上的相关设备,包括摄像结构、行走机构等。并实时地将巡检机器人的位置、位姿、传感器信息发回到监控后台终端,以获取巡检机器人的周围环境信息,保证巡检机器人完成变电站的巡检工作。The industrial computer is the data reception, processing, display and storage center of the entire inspection system, which realizes automatic identification, inspection and alarm of the substation equipment; the main control system is used to control the related equipment on the inspection robot, including the camera structure, walking institutions, etc. And send the position, posture and sensor information of the inspection robot back to the monitoring background terminal in real time to obtain the surrounding environment information of the inspection robot and ensure that the inspection robot completes the inspection of the substation.
无线网络单元用于监控后台终端和巡检机器人信息的无线传输。使巡检机器人通过无线网络单元与监控后台终端实时通信,实现巡检数据的远传和监控后台终端命令的遥控。The wireless network unit is used to monitor the wireless transmission of background terminal and inspection robot information. The inspection robot can communicate with the monitoring background terminal in real time through the wireless network unit, so as to realize the remote transmission of inspection data and the remote control of the monitoring background terminal command.
参看图5,具体地,电源单元包括无线充电装置和蓄电池系统,无线充电装置与蓄电池系统相连,无线充电装置从变电站接收到的交流电整流转变为直流电并传递给蓄电池系统,蓄电池系统为工控机提供电能。5, specifically, the power supply unit includes a wireless charging device and a battery system, the wireless charging device is connected to the battery system, the wireless charging device rectifies the alternating current received from the substation and converts it into direct current and transmits it to the battery system, and the battery system provides the industrial computer. electrical energy.
参看图2,具体地,摄像结构包括传感器组件、补光灯模块和可调节的摄像设备,摄像设备的下方设有摄像头调节模块,传感器组件的输出端与摄像设备的输入端相连接,补光灯模块的输出端与摄像设备的输入端相连接,摄像设备的输出端与数据储存单元相连接。Referring to Fig. 2, specifically, the camera structure comprises a sensor assembly, a fill light module and an adjustable camera device, the camera head adjustment module is provided below the camera device, and the output end of the sensor assembly is connected with the input end of the camera device, and the fill light is provided. The output end of the lamp module is connected with the input end of the camera device, and the output end of the camera device is connected with the data storage unit.
参看图3,具体地,传感器组件包括光敏传感器、雷达避障传感器、姿态传感器、红外测距传感器、温湿度传感器和传感器采集模块,光敏传感器、雷达避障传感器、姿态传感器、红外测距传感器、温湿度传感器均与传感器采集模块相连接,传感器采集模块连接主控系统。3, specifically, the sensor components include a photosensitive sensor, a radar obstacle avoidance sensor, an attitude sensor, an infrared ranging sensor, a temperature and humidity sensor, and a sensor acquisition module, a photosensitive sensor, a radar obstacle avoidance sensor, an attitude sensor, an infrared ranging sensor, The temperature and humidity sensors are connected to the sensor acquisition module, and the sensor acquisition module is connected to the main control system.
参看图4,具体地,摄像头调节模块包括升降调节组件、水平调节组件和俯仰调节组件,摄像设备的下部连接有俯仰调节组件,俯仰调节组件的下部连接有水平调节组件,水平调节组件的下部连接有升降调节组件,升降调节组件设置于巡检机器人上。4, specifically, the camera adjustment module includes a lift adjustment assembly, a level adjustment assembly and a pitch adjustment assembly, the lower part of the camera device is connected with a pitch adjustment assembly, the lower part of the pitch adjustment assembly is connected with a level adjustment assembly, and the lower part of the level adjustment assembly is connected with There are lifting adjustment components, and the lifting adjustment components are arranged on the inspection robot.
进一步,升降调节组件用于调节摄像设备的竖直升降,对摄像设备进行竖直方向上的调节;Further, the lift adjustment component is used to adjust the vertical lift of the camera equipment, and to adjust the camera equipment in the vertical direction;
水平调节组件用于调节摄像设备的水平面内的调节,对摄像设备进行水平面内的旋转调节;The horizontal adjustment component is used to adjust the adjustment in the horizontal plane of the imaging device, and perform the rotation adjustment in the horizontal plane of the imaging device;
俯仰调节组件用于调节摄像设备的俯仰调节,对摄像设备的镜头进行俯仰调节。The pitch adjustment component is used to adjust the pitch adjustment of the imaging device, and perform pitch adjustment for the lens of the imaging device.
进一步,摄像设备为双目CCD摄像机或者双目CMOS摄像机。Further, the imaging device is a binocular CCD camera or a binocular CMOS camera.
进一步,无线网络单元为WiFi装置或蓝牙装置中的任意一种或两种,用于与网络通道进行通讯。Further, the wireless network unit is any one or both of a WiFi device or a Bluetooth device, and is used to communicate with the network channel.
除此之外,巡检机器人上还设有报警系统,所述报警系统包括报警灯和报警喇叭;In addition, the inspection robot is also provided with an alarm system, which includes an alarm light and an alarm horn;
所述报警灯:用于巡检机器人遇到特殊情况时闪烁报警灯,起到警示的作用;The alarm light: it is used to flash the alarm light when the inspection robot encounters a special situation, which plays a warning role;
所述报警喇叭:用于巡检机器人遇到特殊情况时鸣笛,起到警示的作用。The alarm horn: used to sound the horn when the inspection robot encounters a special situation, playing a warning role.
一种具有光线调节的变电站巡检摄像装置的巡检方法,包括以下步骤:An inspection method for a substation inspection camera device with light adjustment, comprising the following steps:
(1)先通过数据储存单元调取该变电站的地理地图信息;然后根据需要检测的变电站设备划分检测区域,该检测区域包括地面检测区域和高空检测区域;地面检测区域又分为厂区外巡检区域和厂区内巡检区域,最后巡检机器人接收到巡检命令后,通过行走机构行走至待巡检的位置,为巡检工作做准备。(1) First retrieve the geographic map information of the substation through the data storage unit; then divide the detection area according to the substation equipment to be detected, the detection area includes the ground detection area and the high-altitude detection area; the ground detection area is divided into off-site inspections The inspection area and the inspection area in the factory area. After the inspection robot finally receives the inspection command, it walks to the position to be inspected through the walking mechanism to prepare for the inspection work.
(2)先对摄像结构进行调试工作,确保摄像设备、传感器组件和补光灯模块正常工作;然后通过传感器组件检测光线角度和强度,由主控系统根据光线角度和强度的检测结果,通过摄像头调节模块带动摄像设备的偏振镜旋转,调整偏振镜角度过滤强光,拍摄该巡检区域的变电站巡检视频流。(2) Debug the camera structure first to ensure the normal operation of the camera equipment, sensor components and fill light module; then detect the light angle and intensity through the sensor component, and the main control system will pass the camera according to the detection results of the light angle and intensity. The adjustment module drives the polarizer of the camera device to rotate, adjusts the angle of the polarizer to filter the strong light, and shoots the substation inspection video stream in the inspection area.
具体的,在此过程中,如果遇到黑夜或者其他恶劣天气时,可通过打开补光灯模块的补光灯,为摄像设备拍摄工作进行补光,便于获取更加清晰的视频流信息。Specifically, during this process, in case of dark night or other bad weather, the fill light of the fill light module can be turned on to fill light for the shooting work of the camera equipment, so as to facilitate the acquisition of clearer video stream information.
进一步,主控系统检测光线强度方法如下:通过摄像设备拍摄图像,得到该光线强度状态下的图像熵,图像熵定义为
其中L=256,L为RGB颜色值的离散化级数,Pr、Pg、Pb分别为RGB颜色分量值r、g、b在图像中出现的概率;Where L=256, L is the discretization series of RGB color values, Pr, Pg, and Pb are the probabilities of RGB color component values r, g, and b appearing in the image, respectively;
通过摄像头调节模块调整摄像设备的镜头角度和位置,得到该光线强度状态下的最大的图像熵,从而通过偏振镜角度过滤强光,拍摄下该巡检区域的变电站巡检视频流。Adjust the lens angle and position of the camera device through the camera adjustment module to obtain the maximum image entropy under the light intensity state, so as to filter the strong light through the angle of the polarizer, and shoot the substation inspection video stream in the inspection area.
(3)通过主控系统对拍摄的变电站巡检视频流进行初步处理,截取有效的T1至T2的变电站巡检视频流。该步骤的目的是剔除前期调试光强拍摄的图像信息及其其他没有在目标巡检物内的图像信息,减少主控系统处理不必要的图像信息。(3) Preliminarily process the captured substation inspection video stream through the main control system, and intercept the effective substation inspection video stream from T1 to T2. The purpose of this step is to eliminate the image information captured by the light intensity in the early stage of debugging and other image information that is not in the target inspection object, so as to reduce unnecessary image information processed by the main control system.
(4)根据有效的T1至T2时间段的变电站巡检视频流,截取每一帧的二维图像信息,形成摄像设备拍摄的有效的T1至T2时间段的变电站巡检视频流的二维图像像素点,二维图像像素点g为(x,y,n),其中x为选取的摄像系统的二维图像像素点横坐标,y为选取的摄像系统的二维图像像素点纵坐标,n取值为1、2、3……n,表示为第n帧的二维图像信息。该步骤的目的是将在截取有效的变电站巡检视频流后,对该变电站巡检视频流信息分成n帧图像信息,形成二维图像像素点g为(x,y,n),为后续转化为全局环境三维特征的图像做准备。(4) According to the valid substation inspection video stream in the time period from T1 to T2, intercept the two-dimensional image information of each frame to form a two-dimensional image of the substation inspection video stream in the effective T1 to T2 time period captured by the camera equipment Pixel point, the two-dimensional image pixel point g is (x, y, n), where x is the abscissa of the two-dimensional image pixel point of the selected camera system, y is the ordinate of the two-dimensional image pixel point of the selected camera system, n The value is 1, 2, 3...n, which is expressed as the two-dimensional image information of the nth frame. The purpose of this step is to divide the information of the substation inspection video stream into n frames of image information after intercepting the valid substation inspection video stream, and form a two-dimensional image pixel point g as (x, y, n), which is used for subsequent transformation. Prepare images of 3D features of the global environment.
(5)将二维图像像素点为g(x,y,n)转化为全局环境三维特征的图像像素点为G(X,Y,Z),G(X,Y,Z)=(x,y,n)*P,

(6)根据得到的全局环境三维特征的图像像素点G(X,Y,Z),提取得到需要巡检区域的变电站三维全景图像信息,并对需要巡检区域的变电站三维全景图像信息进行卷积和反卷积处理,得到最终的需要巡检区域的巡检目标物图像三维图像信息M(X,Y,Z),将巡检目标物图像三维图像信息M(X,Y,Z)与数据储存单元中存储的巡检目标物图像N(X,Y,Z)进行比较,得到匹配相似性u值,计算阀值
本发明结构上通过设置可进行升降调节、水平调节和俯仰调节的摄像设备,通过传感器组件检测光线角度和强度,由主控系统根据光线角度和强度的检测结果,由摄像头调节模块调整摄像设备的镜头角度和位置,即通过摄像头调节模块带动摄像设备的偏振镜旋转,调整偏振镜角度过滤强光,从而避免成像效果出现耀斑、光晕等现象,从而拍摄该巡检区域的变电站巡检视频流。进一步地,通过将拍摄到的变电站巡检视频流截取到有效片段的变电站巡检视频流,并截取变电站巡检视频流每一帧的二维图像信息,形成由n帧组成的二维图像像素点g为(x,y,n)。进而通过将二维图像像素点为g(x,y,n)转化为全局环境三维特征的图像像素点为G(X,Y,Z),方便将由n帧组成的二维图像像素点g为(x,y,n)变成能够显现三维特征的图像。然后提取得到需要巡检区域的变电站三维全景图像信息,并对需要巡检区域的变电站三维全景图像信息进行卷积和反卷积处理,得到最终的需要巡检区域的巡检目标物图像三维图像信息M(X,Y,Z)。最后将巡检目标物图像三维图像信息M(X,Y,Z)与数据储存单元中存储的巡检目标物图像N(X,Y,Z)进行比较,如果符合标准则进行下一巡检区域的巡检工作,如果不符合标准则通知日常维护工作人员进行维护或者维修处理,同过展现巡检目标物图像的三维图像信息,真实的展示出变电站内各设备的运行状态,以及设备操作控制后的实时变化。除此之外,该巡检方法不需要人为参与巡检,针对变电站厂房内部和外部均可以进行日常巡检,极大地提高了巡检效率,且可在高温等恶劣环境下工作、降低人工成本,历史数据可追溯、可横向或纵向对数据进行对比,提前发现故障问题,起到预防危险的作用,对智能电网的实现做出卓越的贡献。Structurally, the present invention is provided with a camera device capable of lifting, horizontal and tilt adjustment, and the sensor component detects the light angle and intensity. Lens angle and position, that is, through the camera adjustment module to drive the polarizer of the camera equipment to rotate, adjust the angle of the polarizer to filter the strong light, so as to avoid flare, halo and other phenomena in the imaging effect, so as to shoot the substation inspection video stream in the inspection area . Further, by intercepting the photographed substation inspection video stream into a substation inspection video stream of a valid segment, and intercepting the two-dimensional image information of each frame of the substation inspection video stream, a two-dimensional image pixel composed of n frames is formed. Point g is (x, y, n). Then, by converting the two-dimensional image pixel point g(x, y, n) into the image pixel point of the three-dimensional feature of the global environment as G(X, Y, Z), it is convenient to convert the two-dimensional image pixel point g composed of n frames as (x, y, n) becomes an image capable of expressing three-dimensional features. Then extract the 3D panoramic image information of the substation in the area that needs to be inspected, and perform convolution and deconvolution processing on the 3D panoramic image information of the substation in the area that needs to be inspected to obtain the final 3D image of the inspection target image in the area that needs to be inspected. Information M(X,Y,Z). Finally, compare the three-dimensional image information M (X, Y, Z) of the inspection target image with the inspection target image N (X, Y, Z) stored in the data storage unit, and if it meets the standard, perform the next inspection If the inspection work in the area does not meet the standard, the daily maintenance staff will be notified to carry out maintenance or repair processing. At the same time, the three-dimensional image information of the image of the inspection target will be displayed, and the operation status of each equipment in the substation and the operation of the equipment will be truly displayed. Real-time changes after control. In addition, this inspection method does not require human participation in inspections. Daily inspections can be carried out both inside and outside the substation plant, which greatly improves inspection efficiency, and can work in harsh environments such as high temperature, reducing labor costs. , historical data can be traced back, data can be compared horizontally or vertically, fault problems can be found in advance, it can play a role in preventing danger, and make outstanding contributions to the realization of smart grid.
以上仅为本发明的具体实施例,但本发明的技术特征并不局限于此。任何以本发明为基础,为解决基本相同的技术问题,实现基本相同的技术效果,所作出地简单变化、等同替换或者修饰等,皆涵盖于本发明的保护范围之中。The above are only specific embodiments of the present invention, but the technical features of the present invention are not limited thereto. Any simple changes, equivalent replacements or modifications made based on the present invention in order to solve basically the same technical problems and achieve basically the same technical effects are all included in the protection scope of the present invention.
Claims (2)




Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011418710.8ACN112543272B (en) | 2020-12-07 | 2020-12-07 | Transformer substation inspection camera device with light regulation function and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011418710.8ACN112543272B (en) | 2020-12-07 | 2020-12-07 | Transformer substation inspection camera device with light regulation function and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112543272A CN112543272A (en) | 2021-03-23 |
| CN112543272Btrue CN112543272B (en) | 2022-05-24 |
Family
ID=75016312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011418710.8AActiveCN112543272B (en) | 2020-12-07 | 2020-12-07 | Transformer substation inspection camera device with light regulation function and method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112543272B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113518165A (en)* | 2021-04-22 | 2021-10-19 | 云南电网有限责任公司昆明供电局 | A camera automatic light adjustment device and adjustment method |
| CN114738595B (en)* | 2022-04-07 | 2023-03-21 | 东北大学 | Pipeline inspection robot and inspection method |
| CN119376404B (en)* | 2024-12-27 | 2025-04-18 | 杭州施厚能源科技有限公司 | Fan intelligent point inspection method, system and terminal |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104253979A (en)* | 2014-09-24 | 2014-12-31 | 深圳市傲天智能系统有限公司 | Self-sensing intelligent camera |
| CN208075921U (en)* | 2018-03-29 | 2018-11-09 | 陕西新华安电力工程有限公司 | A kind of electric power safety monitor system based on unmanned plane |
| CN109324649A (en)* | 2018-09-04 | 2019-02-12 | 南京理工大学 | A kind of substation compound inspection system and method |
| CN109291053A (en)* | 2018-10-31 | 2019-02-01 | 深圳供电局有限公司 | Patrol and examine robot control system |
| CN110035265A (en)* | 2019-05-21 | 2019-07-19 | 河南赛普斯特仪器仪表有限公司 | A kind of intelligent inspection robot and system for security protection |
| CN110647082A (en)* | 2019-10-09 | 2020-01-03 | 宁波思高信通科技有限公司 | Intelligent inspection system for machine room and working method of intelligent inspection system |
| CN111571598A (en)* | 2020-05-29 | 2020-08-25 | 杭州申昊科技股份有限公司 | Intelligent inspection method of explosion-proof inspection robot |
| CN111590639A (en)* | 2020-06-08 | 2020-08-28 | 广东电网有限责任公司 | Automatic light supplementing system and method for transformer substation inspection robot and inspection robot |
- 2020
- 2020-12-07CNCN202011418710.8Apatent/CN112543272B/enactiveActive
Also Published As
| Publication number | Publication date |
|---|---|
| CN112543272A (en) | 2021-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110297498B (en) | A method and system for orbit inspection based on wireless charging UAV | |
| CN112543272B (en) | Transformer substation inspection camera device with light regulation function and method | |
| WO2022037278A1 (en) | Substation inspection robot system based on artificial intelligence | |
| CN107491781A (en) | A kind of crusing robot visible ray and infrared sensor data fusion method | |
| CN101378501A (en) | Ganged monitoring apparatus for infrared panorama and control method thereof | |
| CN206031396U (en) | High -speed railway pulls institute's pavilion intelligence and patrols survey system | |
| CN112056301A (en) | Transformer substation autonomously detects bird repellent system | |
| CN114905512B (en) | Panoramic tracking and obstacle avoidance method and system for intelligent inspection robot | |
| CN105547367B (en) | A kind of high voltage isolator Vibration Condition Monitoring system | |
| CN110858892B (en) | Shore Island Observation System | |
| CN108628321A (en) | Special feelings inspection machine people in a kind of unattended operation transformer station room | |
| CN105704427A (en) | Intelligent video monitoring system for high-voltage power transmission line | |
| CN106504363A (en) | A kind of airborne pair of light cruising inspection system stabilized platform automatic tracking method of intelligence | |
| CN204231553U (en) | A kind of intelligent video monitoring system for ultra-high-tension power transmission line | |
| CN107526317A (en) | A kind of laser foreign matter based on mobile terminal removes instrument intelligence control system | |
| CN103051884A (en) | Omni-directional visual monitoring system combining rough and fine modes | |
| CN101833117A (en) | Intelligent vehicle safety vision detection device and motion target tracking method | |
| CN211663066U (en) | Multi-camera exploration trolley for electrical safety hidden danger investigation | |
| CN203722342U (en) | Inspection system of transformer station | |
| CN114422713B (en) | Image acquisition and intelligent interpretation processing device and method | |
| Hu et al. | Design of pipe-inspection robot based on yolov3 | |
| CN113743286A (en) | Target monitoring system and method for multi-source signal fusion | |
| CN111504257B (en) | Visual ranging system and method for assisting unmanned aerial vehicle in accurate line patrol | |
| CN205280151U (en) | High voltage isolator vibration state monitoring system | |
| CN111942426A (en) | Hot infrared-based molten iron transportation locomotive axle temperature measurement method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | Denomination of invention:A substation inspection camera device and method with light adjustment Granted publication date:20220524 Pledgee:Guotou Taikang Trust Co.,Ltd. Pledgor:Hangzhou Shenhao Technology Co.,Ltd. Registration number:Y2024980045687 |