CN112088783A - Scraping and sweeping integrated pigsty manure cleaning robot - Google Patents
Scraping and sweeping integrated pigsty manure cleaning robotDownload PDFInfo
- Publication number
- CN112088783A CN112088783ACN202011019762.8ACN202011019762ACN112088783ACN 112088783 ACN112088783 ACN 112088783ACN 202011019762 ACN202011019762 ACN 202011019762ACN 112088783 ACN112088783 ACN 112088783A
- Authority
- CN
- China
- Prior art keywords
- scraping
- fuselage
- cleaning
- manure
- pig house
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K1/00—Housing animals; Equipment therefor
- A01K1/01—Removal of dung or urine ; Removal of manure from stables
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K1/00—Housing animals; Equipment therefor
- A01K1/01—Removal of dung or urine ; Removal of manure from stables
- A01K1/0128—Removal of dung or urine ; Removal of manure from stables by means of scrapers or the like moving continuously
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Zoology (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Cleaning In General (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及机器人技术,具体涉及一种刮扫一体式猪舍清粪机器人。The invention relates to robot technology, in particular to a scraping and sweeping integrated pig house manure cleaning robot.
背景技术Background technique
猪舍卫生问题直接影响猪只疾病健康,然而粪便清理问题是畜牧养殖卫生重要的一个环节,畜牧粪便难以清理且含有较多有害物质及病菌,若不及时清理会污染畜牧养殖环境进而出现一系列疾病卫生问题。很多小户型养殖厂大多采用地面底部安装粪槽的猪舍结构,这种猪舍基本上都需要人工清理,从而将粪便清理至底部粪槽中,人工清理不仅劳动量大且疾病风险大。The hygiene problem of pig house directly affects the health of pigs. However, the problem of manure cleaning is an important part of animal husbandry hygiene. Animal manure is difficult to clean and contains many harmful substances and bacteria. Disease health issues. Many small-scale breeding plants mostly use pig houses with manure troughs installed at the bottom of the ground. This type of pig house basically requires manual cleaning, so that the manure is cleaned into the bottom manure trough. Manual cleaning is not only labor intensive but also high risk of disease.
发明内容SUMMARY OF THE INVENTION
本发明的目的是为了克服以上现有技术存在的不足,提供了一种刮扫一体式猪舍清粪机器人。此刮扫一体式猪舍清粪机器人可降低劳动量,降低疾病风险。The purpose of the present invention is to provide a scraping and sweeping integrated pig house manure cleaning robot in order to overcome the above shortcomings of the prior art. This all-in-one swine manure cleaning robot reduces labor and reduces the risk of disease.
本发明的目的通过以下的技术方案实现:本刮扫一体式猪舍清粪机器人,包括机身、驱动机构、清理机构、导航机构、电源机构和控制机构,所述驱动机构安装于机身的下端,所述清理机构安装于机身的前端,所述导航机构安装于机身,且所述驱动机构、清理机构和导航机构均与电源机构连接;所述驱动机构、清理机构、导航机构和电源机构均与控制机构连接。The purpose of the present invention is achieved through the following technical solutions: the scraping and sweeping integrated pig house manure cleaning robot includes a body, a driving mechanism, a cleaning mechanism, a navigation mechanism, a power supply mechanism and a control mechanism, and the driving mechanism is installed on the fuselage. At the lower end, the cleaning mechanism is installed on the front end of the fuselage, the navigation mechanism is installed on the fuselage, and the driving mechanism, the cleaning mechanism and the navigation mechanism are all connected with the power supply mechanism; the driving mechanism, the cleaning mechanism, the navigation mechanism and the The power supply mechanism is connected with the control mechanism.
优选的,所述清理机构包括喷头、水泵、水箱、毛刷和毛刷电机,所述喷头和毛刷均安装于机身的前端,且所述毛刷位于喷头的前方,所述毛刷电机安装于机身内,所述毛刷电机的动力输出轴与毛刷连接;所述喷头通过输水管与水泵连接,所述水泵与安装于机身内的水箱连接。Preferably, the cleaning mechanism includes a spray head, a water pump, a water tank, a brush and a brush motor, the spray head and the brush are installed on the front end of the fuselage, and the brush is located in front of the spray head, and the brush motor Installed in the fuselage, the power output shaft of the brush motor is connected with the brush; the spray head is connected with a water pump through a water delivery pipe, and the water pump is connected with a water tank installed in the fuselage.
优选的,所述清理机构还包括圆弧形的刮粪板,所述刮粪板安装于机身的下面,且所述毛刷、喷头和刮粪板沿机身的前端至后端依次分布。Preferably, the cleaning mechanism further includes a circular arc-shaped manure scraper, the manure scraper is installed under the fuselage, and the brushes, spray heads and manure scrapers are sequentially distributed from the front end to the rear end of the fuselage .
优选的,所述刮粪板包括金属板,此金属板被橡胶层包裹。Preferably, the manure scraping plate includes a metal plate, and the metal plate is wrapped by a rubber layer.
优选的,所述驱动机构包括左驱动轮、右驱动轮、万向轮、左驱动电机和右驱动电机,所述左驱动轮和右驱动轮分别安装于机身的后端的两侧,所述左驱动电机和右驱动电机均安装于机身内,且所述左驱动电机和右驱动电机分别与左驱动轮和右驱动轮连接,所述万向轮安装于机身的前端,所述左驱动电机和右驱动电机均与控制机构连接。Preferably, the driving mechanism includes a left driving wheel, a right driving wheel, a universal wheel, a left driving motor and a right driving motor, the left driving wheel and the right driving wheel are respectively installed on both sides of the rear end of the fuselage, and the Both the left drive motor and the right drive motor are installed in the fuselage, and the left drive motor and the right drive motor are respectively connected with the left drive wheel and the right drive wheel, the universal wheel is installed at the front end of the fuselage, the left drive motor Both the drive motor and the right drive motor are connected to the control mechanism.
优选的,所述电源机构包括电池组和充电电路,所述驱动机构、清理机构、导航机构和控制机构均与电池组连接,所述机身设有充电头,此充电头通过充电电路与电池组连接。Preferably, the power supply mechanism includes a battery pack and a charging circuit, the driving mechanism, the cleaning mechanism, the navigation mechanism and the control mechanism are all connected to the battery pack, the body is provided with a charging head, and the charging head is connected to the battery through the charging circuit Group connection.
优选的,所述控制机构包括第一控制器和第二控制器,所述导航机构与第一控制器连接,所述驱动机构、清理机构和电源机构均与第二控制器连接,所述第一控制器与第二控制器信号连接。Preferably, the control mechanism includes a first controller and a second controller, the navigation mechanism is connected to the first controller, the driving mechanism, the cleaning mechanism and the power supply mechanism are all connected to the second controller, the first controller A controller is signally connected to the second controller.
优选的,所述导航机构包括激光雷达,此激光雷达与控制机构连接。Preferably, the navigation mechanism includes a laser radar, and the laser radar is connected to the control mechanism.
优选的,所述机身的前端两侧均设有滚轮,所述机身的前端端面设有缓冲板。Preferably, both sides of the front end of the fuselage are provided with rollers, and the front end face of the fuselage is provided with a buffer plate.
优选的,所述清理机构的水箱设有用于检测水箱的水量的第一传感器,所述机身设有用于检测电源机构的电量的第二传感器,所述第一传感器和第二传感器均与控制机构连接。Preferably, the water tank of the cleaning mechanism is provided with a first sensor for detecting the amount of water in the water tank, the body is provided with a second sensor for detecting the power of the power supply mechanism, the first sensor and the second sensor are both connected to the control Institutional connections.
本发明相对于现有技术具有如下的优点:Compared with the prior art, the present invention has the following advantages:
1、本刮扫一体式猪舍清粪机器人主要由机身、驱动机构、清理机构、导航机构、电源机构和控制机构构成,这利用器械代替人工清理猪舍的环境,降低了劳动强度,清粪效果好,工作效率高;同时采用导航机构和控制机构等进行智能控制,这智能程度高。1. This scraping and sweeping integrated pig house manure cleaning robot is mainly composed of a body, a driving mechanism, a cleaning mechanism, a navigation mechanism, a power supply mechanism and a control mechanism. The manure effect is good and the work efficiency is high; at the same time, the navigation mechanism and the control mechanism are used for intelligent control, which has a high degree of intelligence.
2、本刮扫一体式猪舍清粪机器人中的清理机构主要由喷头、水泵、水箱、毛刷和毛刷电机构成,这采用喷头水洗和毛刷清扫结合进行清粪操作,清粪效果好,效率高;同时还可利用毛刷将粪便推送到粪槽中,故本发明非常适用于具有粪槽结构的猪舍。2. The cleaning mechanism in this scraping and sweeping integrated pig house manure cleaning robot is mainly composed of nozzles, water pumps, water tanks, brushes and brush motors. , high efficiency; at the same time, the feces can be pushed into the manure tank by using the brush, so the present invention is very suitable for the pig house with the manure tank structure.
附图说明Description of drawings
图1是本发明的刮扫一体式猪舍清粪机器人的结构示意图。FIG. 1 is a schematic structural diagram of the scraping and sweeping integrated pig house manure cleaning robot of the present invention.
图2是本发明的刮扫一体式猪舍清粪机器人的内部结构示意图。2 is a schematic diagram of the internal structure of the scraping and sweeping integrated pig house manure cleaning robot of the present invention.
图3是本发明的刮扫一体式猪舍清粪机器人的仰视图。Fig. 3 is a bottom view of the scraping and sweeping-integrated pig house manure cleaning robot of the present invention.
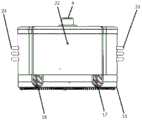
图4是本发明的刮扫一体式猪舍清粪机器人的前视图。Fig. 4 is a front view of the scraping and sweeping-integrated pig house manure cleaning robot of the present invention.
图5是本发明的刮扫一体式猪舍清粪机器人的后视图。5 is a rear view of the scraping and sweeping-integrated pig house manure cleaning robot of the present invention.
图6是本发明的驱动机构的结构示意图。FIG. 6 is a schematic structural diagram of the driving mechanism of the present invention.
其中,1为机身,2为驱动机构,3为清理机构,4为导航机构,5为电源机构,6为控制机构,7为底壳,8为顶盖,9为支撑板,10为喷头,11为水泵,12为水箱,13为毛刷,14为毛刷电机,15为刮粪板,16为左驱动轮,17为右驱动轮,18为万向轮,19为左驱动电机,20为右驱动电机,21为电池组,22为充电头,23为滚轮,24为缓冲板,25为左减速器,26为右减速器,27为注水接头。Among them, 1 is the fuselage, 2 is the driving mechanism, 3 is the cleaning mechanism, 4 is the navigation mechanism, 5 is the power supply mechanism, 6 is the control mechanism, 7 is the bottom shell, 8 is the top cover, 9 is the support plate, and 10 is the nozzle. , 11 is the water pump, 12 is the water tank, 13 is the brush, 14 is the brush motor, 15 is the scraper, 16 is the left driving wheel, 17 is the right driving wheel, 18 is the universal wheel, 19 is the left driving motor, 20 is the right drive motor, 21 is the battery pack, 22 is the charging head, 23 is the roller, 24 is the buffer plate, 25 is the left reducer, 26 is the right reducer, and 27 is the water injection connector.
具体实施方式Detailed ways
下面结合附图和实施例对本发明作进一步说明。The present invention will be further described below with reference to the accompanying drawings and embodiments.
如图1至图5所示的刮扫一体式猪舍清粪机器人,包括机身、驱动机构、清理机构、导航机构、电源机构和控制机构,所述驱动机构安装于机身的下端,所述清理机构安装于机身的前端,所述导航机构安装于机身,且所述驱动机构、清理机构和导航机构均与电源机构连接;所述驱动机构、清理机构、导航机构和电源机构均与控制机构连接。具体的,在工作过程中,利用导航机构收集工作环境信息,控制机构对此工作环境信息进行处理,从而对驱动机构和清理机构发出控制指令,从而本刮扫一体式猪舍清粪机器人代替传统人工对猪舍进行智能化清理,这智能程度高,工作效率高,清粪效果好。而机身主要由底壳和顶盖构成,顶盖与底壳的上端连接,底壳和顶盖形成用于安装电源机构等的安装腔,从而对各机构中的元器件起到保护作用,以防止灰尘和粪便等污染物污染损坏元器件。为进一步保证结构的紧凑性的稳定性,在安装腔内设置支撑板,电源机构的电池组和控制机构安装于支撑板上。As shown in Figures 1 to 5, the scraping and sweeping integrated pig house manure cleaning robot includes a body, a driving mechanism, a cleaning mechanism, a navigation mechanism, a power supply mechanism and a control mechanism. The driving mechanism is installed at the lower end of the body, so The cleaning mechanism is installed on the front end of the fuselage, the navigation mechanism is installed on the fuselage, and the driving mechanism, the cleaning mechanism and the navigation mechanism are all connected with the power supply mechanism; the driving mechanism, the cleaning mechanism, the navigation mechanism and the power supply mechanism are all Connect to the control mechanism. Specifically, in the working process, the navigation mechanism is used to collect the working environment information, and the control mechanism processes the working environment information, thereby issuing control instructions to the driving mechanism and the cleaning mechanism, so that the scraping and sweeping integrated pig house manure cleaning robot replaces the traditional Manually clean the pig house intelligently, which has high intelligence, high work efficiency and good manure removal effect. The fuselage is mainly composed of a bottom shell and a top cover. The top cover is connected to the upper end of the bottom shell. The bottom shell and the top cover form an installation cavity for installing the power supply mechanism, etc., so as to protect the components in each mechanism. To prevent contamination and damage to components such as dust and feces. In order to further ensure the compactness and stability of the structure, a support plate is arranged in the installation cavity, and the battery pack and the control mechanism of the power supply mechanism are installed on the support plate.
所述清理机构包括喷头、水泵、水箱、毛刷和毛刷电机,所述喷头和毛刷均安装于机身的前端,且所述毛刷位于喷头的前方,所述毛刷电机安装于机身内,所述毛刷电机的动力输出轴与毛刷连接;所述喷头通过输水管与水泵连接,所述水泵与安装于机身内的水箱连接。具体的,如图3所示,喷头和毛刷均安装于机身的前端的下面,且毛刷具2个,此2个毛刷分别安装于前端下面的两侧;毛刷电机的数量与毛刷的数量相同,即2个毛刷电机的分别与2个毛刷连接,从而可驱动2个毛刷反向转动,从而方便将粪便向外推,以将粪便推送到猪舍中粪槽中,以完成猪舍地面上的粪便清理。为提高毛刷的清扫效率及清扫效果,水泵抽取水箱中的水再从喷头喷射出来,从而对地需上的粪便进行清洗及湿润,湿润的粪便更容易被毛刷清扫,这利用水洗和毛刷清扫结合的方式对猪舍中的粪便进行清理,效率高且效果好。同时,水箱内设有第一传感器,此第一传感器用于检测水箱内的水量,当水箱内的水量低于设定值时。第二控制器根据第一传感器传递过来的信息,发出控制指令,以令驱动机构动作,则机器人沿规划路线返回加水。其中注水接头安装于机身的上端,此注水接头与水箱连通,从而方便给水箱补充水。The cleaning mechanism includes a spray head, a water pump, a water tank, a brush and a brush motor. The spray head and the brush are installed on the front end of the fuselage, and the brush is located in front of the spray head. The brush motor is installed on the machine. Inside the body, the power output shaft of the brush motor is connected with the brush; the spray head is connected with a water pump through a water delivery pipe, and the water pump is connected with a water tank installed in the body. Specifically, as shown in Figure 3, the spray head and the brush are installed under the front end of the fuselage, and there are two brushes, and the two brushes are respectively installed on both sides under the front end; the number of brush motors is the same as The number of brushes is the same, that is, the 2 brush motors are connected to the 2 brushes respectively, so that the 2 brushes can be driven to rotate in the opposite direction, so as to facilitate the pushing of the feces outward to push the feces to the manure tank in the pig house , to complete the manure removal from the barn floor. In order to improve the cleaning efficiency and cleaning effect of the brush, the water pump extracts the water in the water tank and sprays it out from the nozzle, so as to clean and moisten the feces on the ground, and the wet feces are easier to be cleaned by the brush. The combination of brushing and cleaning is used to clean the feces in the pig house, which is efficient and effective. At the same time, a first sensor is provided in the water tank, and the first sensor is used to detect the water volume in the water tank when the water volume in the water tank is lower than the set value. According to the information transmitted by the first sensor, the second controller issues a control command to make the driving mechanism move, and the robot returns to add water along the planned route. The water injection joint is installed on the upper end of the fuselage, and the water injection joint is communicated with the water tank, so as to facilitate the replenishment of water to the water tank.
所述清理机构还包括圆弧形的刮粪板,所述刮粪板安装于机身的下面,且所述毛刷、喷头和刮粪板沿机身的前端至后端依次分布。采用水洗和毛刷清扫之后,再使用刮粪板对地面进行刮扫,这可进一步提高清理效果。同时,所述刮粪板包括金属板,此金属板被橡胶层包裹。所述刮粪板直接与地面接触,对机身也起到支撑作用,增加清扫效果。此结构的刮粪板,既提高清理效果,还降低了噪音。The cleaning mechanism further includes a circular arc-shaped manure scraping board, which is installed under the fuselage, and the brushes, spray heads and manure scraping boards are sequentially distributed along the front end to the rear end of the fuselage. After washing with water and brushing, use a manure scraper to scrape the ground, which can further improve the cleaning effect. Meanwhile, the manure scraping plate includes a metal plate, and the metal plate is wrapped by a rubber layer. The manure scraping board is in direct contact with the ground, and also plays a supporting role for the fuselage, thereby increasing the cleaning effect. The manure scraping board of this structure not only improves the cleaning effect, but also reduces the noise.
一种基于上述的刮扫一体式清粪机器人包括以下清粪步骤:A scraping and sweeping integrated manure cleaning robot based on the above includes the following manure cleaning steps:
S1、喷头喷水对粪便进行湿润及清理;S1. The nozzle sprays water to wet and clean the feces;
S2、毛刷反向旋转将粪便清理至粪槽中;S2, the brush reversely rotates to clean the feces into the fecal tank;
S3、刮粪板将残余粪便清理至粪槽中.S3. Scraping the manure board to clean the residual manure into the manure tank.
具体的,本刮扫一体式清粪机器人通过水洗、毛刷清扫及刮粪清理三种方式相结合,可达到理想的清粪效果。Specifically, the scraping and sweeping integrated manure cleaning robot can achieve an ideal manure cleaning effect through the combination of three methods: water washing, brush cleaning and scraping and manure cleaning.
如图1、图2及图6所示,所述驱动机构包括左驱动轮、右驱动轮、万向轮、左驱动电机和右驱动电机,所述左驱动轮和右驱动轮分别安装于机身的后端的两侧,所述左驱动电机和右驱动电机均安装于机身内,且所述左驱动电机和右驱动电机分别与左驱动轮和右驱动轮连接,所述万向轮安装于机身的前端,所述左驱动电机和右驱动电机均与控制机构连接。具体的,左驱动轮、右驱动轮和万向轮均采用橡胶轮,以防止打滑,保证整个机器人稳定行驶,以保证清粪机构和集粪机构有效工作。为进一步行驶的稳定性,左驱动电机通过左减速器和左驱动轮连接,右驱动电机通过右减速器与右驱动轮连接。所述万向轮高度可根据路面高低进行调节,使得刮粪板在不同的路面高度始终紧贴地面,以此适应不同的路面环境。As shown in Figure 1, Figure 2 and Figure 6, the driving mechanism includes a left driving wheel, a right driving wheel, a universal wheel, a left driving motor and a right driving motor, and the left driving wheel and the right driving wheel are respectively installed on the machine On both sides of the rear end of the body, the left drive motor and the right drive motor are installed in the body, and the left drive motor and the right drive motor are respectively connected with the left drive wheel and the right drive wheel, and the universal wheel is installed At the front end of the fuselage, the left drive motor and the right drive motor are both connected with the control mechanism. Specifically, the left driving wheel, the right driving wheel and the universal wheel are all rubber wheels to prevent slippage and ensure the stable running of the whole robot, so as to ensure the effective operation of the manure cleaning mechanism and the manure collecting mechanism. For further driving stability, the left drive motor is connected with the left drive wheel through the left reducer, and the right drive motor is connected with the right drive wheel through the right reducer. The height of the universal wheel can be adjusted according to the height of the road surface, so that the manure scraper is always close to the ground at different road heights, so as to adapt to different road conditions.
所述电源机构包括电池组和充电电路,所述驱动机构、清理机构、导航机构和控制机构均与电池组连接,所述机身设有充电头,此充电头通过充电电路与电池组连接。电源机构主要为清理机构、导航机构和控制机构等提供动力。本实施例,电池组采用额定电压为24V的蓄电池构成。为减少设计成本,充电电路采用现有的充电电路。同时利用第二传感器监测电池组的电量,当电池组的电压低于设定值时,第二控制器根据第二传感器传递过来的信息,发出控制指令,以令驱动机构动作,则机器人按规划路线返回充电。The power supply mechanism includes a battery pack and a charging circuit. The driving mechanism, the cleaning mechanism, the navigation mechanism and the control mechanism are all connected to the battery pack. The body is provided with a charging head, which is connected to the battery pack through the charging circuit. The power supply mechanism mainly provides power for the cleaning mechanism, the navigation mechanism and the control mechanism. In this embodiment, the battery pack is formed of a battery with a rated voltage of 24V. In order to reduce the design cost, the charging circuit adopts the existing charging circuit. At the same time, the second sensor is used to monitor the power of the battery pack. When the voltage of the battery pack is lower than the set value, the second controller will issue a control command according to the information transmitted by the second sensor to make the driving mechanism move, and the robot will follow the plan. Route back to charging.
所述控制机构包括第一控制器和第二控制器,所述导航机构与第一控制器连接,所述驱动机构、清理机构和电源机构均与第二控制器连接,所述第一控制器与第二控制器信号连接。具体的,本实施例第一控制器采用树莓派,第二控制器采用STM32F103微处理器。其中,第一控制器与导航机构中的激光雷达连接,以接收激光雷达检测到的工作环境数据,并对环境数据进行处理,然后将处理结果输送给第二控制器,第二控制器根据第一控制器的处理结构以发出控制指令,从而控制驱动中的左驱动电机和右驱动电机、清理机构中毛刷电机及电源机构工作。这采用第一控制器和第二控制器分别对种部件的信息进行接收处理,响应速度快,进一步提高工作效率。The control mechanism includes a first controller and a second controller, the navigation mechanism is connected with the first controller, the drive mechanism, the cleaning mechanism and the power supply mechanism are all connected with the second controller, the first controller Signal connection with the second controller. Specifically, in this embodiment, the first controller adopts a Raspberry Pi, and the second controller adopts an STM32F103 microprocessor. The first controller is connected to the laser radar in the navigation mechanism to receive the working environment data detected by the laser radar, process the environment data, and then transmit the processing result to the second controller, and the second controller according to the first controller The processing structure of a controller is used to issue control commands to control the operation of the left drive motor and the right drive motor in driving, the brush motor in the cleaning mechanism and the power supply mechanism. In this case, the first controller and the second controller are used to receive and process the information of the various components respectively, and the response speed is fast, which further improves the work efficiency.
所述导航机构包括激光雷达,此激光雷达与控制机构中的第一控制器连接。激光雷达用于检测工作环境数据,如地形、障碍物(如猪舍内工作人员和猪)及目标物(即粪便)等,然后将检测到的工作环境数据输送给第一控制器,第一控制器根据此工作环境数据进行环境地图构建、路径规划、动态避障及目标物清扫计划,从而配合环境地图和最优路径进行清粪操作。The navigation mechanism includes a laser radar, and the laser radar is connected to the first controller in the control mechanism. Lidar is used to detect working environment data, such as terrain, obstacles (such as staff and pigs in the pig house) and targets (ie feces), etc., and then transmit the detected working environment data to the first controller, the first The controller performs environmental map construction, path planning, dynamic obstacle avoidance and target cleaning plan according to the working environment data, so as to cooperate with the environmental map and the optimal path to perform manure cleaning operations.
所述机身的前端两侧均设有滚轮,所述机身的前端端面设有缓冲板。滚轮可避免机身之间发生碰撞,且滚轮与墙体之初是的摩擦力小,以保证整个机器人顺畅行进。而缓冲板可避免与墙面撞击时造成损坏。Both sides of the front end of the fuselage are provided with rollers, and the front end face of the fuselage is provided with a buffer plate. The rollers can avoid collisions between the fuselage, and the friction between the rollers and the wall is small at the beginning, so as to ensure the smooth running of the whole robot. The buffer plate can avoid damage when it collides with the wall.
上述具体实施方式为本发明的优选实施例,并不能对本发明进行限定,其他的任何未背离本发明的技术方案而所做的改变或其它等效的置换方式,都包含在本发明的保护范围之内。The above-mentioned specific embodiments are the preferred embodiments of the present invention, and do not limit the present invention. Any other changes or other equivalent replacement methods that do not deviate from the technical solutions of the present invention are included in the protection scope of the present invention. within.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011019762.8ACN112088783A (en) | 2020-09-25 | 2020-09-25 | Scraping and sweeping integrated pigsty manure cleaning robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011019762.8ACN112088783A (en) | 2020-09-25 | 2020-09-25 | Scraping and sweeping integrated pigsty manure cleaning robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112088783Atrue CN112088783A (en) | 2020-12-18 |
Family
ID=73756140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011019762.8APendingCN112088783A (en) | 2020-09-25 | 2020-09-25 | Scraping and sweeping integrated pigsty manure cleaning robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112088783A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113100088A (en)* | 2021-04-13 | 2021-07-13 | 安徽凌坤智能科技有限公司 | Pig house air purification robot of plant |
| CN113273499A (en)* | 2021-05-28 | 2021-08-20 | 广东广兴牧业机械设备有限公司 | Intelligent dung cleaning robot in hog house and control system thereof |
| CN113741430A (en)* | 2021-08-16 | 2021-12-03 | 河南牧原智能科技有限公司 | Autonomous navigation method, apparatus and computer storage medium for dung cleaning robot |
| CN113785776A (en)* | 2021-08-26 | 2021-12-14 | 北京市农林科学院智能装备技术研究中心 | A pig house manure cleaning robot, manure removal method and pig health diagnosis method |
| CN117223614A (en)* | 2022-06-06 | 2023-12-15 | 广东神龙智能科技有限公司 | Multifunctional intelligent manure cleaning machine |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107711531A (en)* | 2017-11-06 | 2018-02-23 | 华南农业大学 | One kind sweeps formula pig farm automatic manure-cleaning car and cleaning up excrement method |
| CN109362582A (en)* | 2018-11-22 | 2019-02-22 | 哈尔滨天河自动化设备有限公司 | One kind being suitable for more scene piggery cleaner device people and method for cleaning |
| CN111183905A (en)* | 2020-02-27 | 2020-05-22 | 哈尔滨天河自动化设备有限公司 | Fattening pig house cleaning robot |
| CN210580423U (en)* | 2019-09-26 | 2020-05-22 | 牧原食品股份有限公司 | A manure cleaning robot |
- 2020
- 2020-09-25CNCN202011019762.8Apatent/CN112088783A/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107711531A (en)* | 2017-11-06 | 2018-02-23 | 华南农业大学 | One kind sweeps formula pig farm automatic manure-cleaning car and cleaning up excrement method |
| CN109362582A (en)* | 2018-11-22 | 2019-02-22 | 哈尔滨天河自动化设备有限公司 | One kind being suitable for more scene piggery cleaner device people and method for cleaning |
| CN210580423U (en)* | 2019-09-26 | 2020-05-22 | 牧原食品股份有限公司 | A manure cleaning robot |
| CN111183905A (en)* | 2020-02-27 | 2020-05-22 | 哈尔滨天河自动化设备有限公司 | Fattening pig house cleaning robot |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113100088A (en)* | 2021-04-13 | 2021-07-13 | 安徽凌坤智能科技有限公司 | Pig house air purification robot of plant |
| CN113273499A (en)* | 2021-05-28 | 2021-08-20 | 广东广兴牧业机械设备有限公司 | Intelligent dung cleaning robot in hog house and control system thereof |
| CN113741430A (en)* | 2021-08-16 | 2021-12-03 | 河南牧原智能科技有限公司 | Autonomous navigation method, apparatus and computer storage medium for dung cleaning robot |
| CN113741430B (en)* | 2021-08-16 | 2024-05-31 | 河南牧原智能科技有限公司 | Autonomous navigation method and device for excrement cleaning robot and computer storage medium |
| CN113785776A (en)* | 2021-08-26 | 2021-12-14 | 北京市农林科学院智能装备技术研究中心 | A pig house manure cleaning robot, manure removal method and pig health diagnosis method |
| CN117223614A (en)* | 2022-06-06 | 2023-12-15 | 广东神龙智能科技有限公司 | Multifunctional intelligent manure cleaning machine |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112088783A (en) | Scraping and sweeping integrated pigsty manure cleaning robot | |
| TWI726551B (en) | Master-slave cooperative cleaning robot system | |
| CN107137022B (en) | Intelligent cleaning robot system | |
| CN113678741B (en) | Automatic excrement and sewage identification fixed-point sterilization robot with recycling function and sterilization method | |
| CN112237145A (en) | Suction and sweeping integrated dung cleaning robot and dung cleaning method thereof | |
| CN113785776B (en) | A pig house manure cleaning robot, manure cleaning method and pig health diagnosis method | |
| CN207803091U (en) | The box-like pig house of smart group and dung collection system | |
| CN107080502B (en) | Intelligent cleaning robot system | |
| CN107624653B (en) | Intelligent combined pigsty and fecal collection system | |
| CN102733338A (en) | A hand-push sweeper without power | |
| CN210202825U (en) | Pig house pig manure cleaning device | |
| CN113273499A (en) | Intelligent dung cleaning robot in hog house and control system thereof | |
| CN205161445U (en) | Place cleaning device raises | |
| CN214902918U (en) | Clear excrement robot of intelligence in pig raising house | |
| CN210299026U (en) | Dung cleaning cart for henhouse | |
| CN216164218U (en) | Manure cleaning robot for animal house | |
| CN212138802U (en) | Automatic excrement cleaning device that scrapes of removing of cowshed | |
| CN216535119U (en) | Cleaning robot | |
| CN212138800U (en) | Manure cleaner navigation system | |
| CN209508902U (en) | A kind of pavement cleaning | |
| CN209268286U (en) | A kind of livestock farm convenient for cleaning inside | |
| CN209346909U (en) | A kind of full dimension gets over six function cleaning robot of layer and service sink automatically | |
| CN118830493A (en) | Circular livestock shed scraper dung cleaning machine | |
| CN112470946A (en) | Navigation system and navigation method of dung cleaner | |
| CN217771089U (en) | Pig house intelligence cleaning machines people |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20201218 |