CN112072893A - A Power Electronic Converter Control Method with Synthetic Variable Feedback - Google Patents
A Power Electronic Converter Control Method with Synthetic Variable FeedbackDownload PDFInfo
- Publication number
- CN112072893A CN112072893ACN202010576571.5ACN202010576571ACN112072893ACN 112072893 ACN112072893 ACN 112072893ACN 202010576571 ACN202010576571 ACN 202010576571ACN 112072893 ACN112072893 ACN 112072893A
- Authority
- CN
- China
- Prior art keywords
- neural network
- control
- error
- variable
- power electronic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/11—Complex mathematical operations for solving equations, e.g. nonlinear equations, general mathematical optimization problems
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/32—Means for protecting converters other than automatic disconnection
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of AC power input into DC power output; Conversion of DC power input into AC power output
- H02M7/42—Conversion of DC power input into AC power output without possibility of reversal
- H02M7/44—Conversion of DC power input into AC power output without possibility of reversal by static converters
- H02M7/48—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/5387—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration
- H02M7/53871—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current
- H02M7/53873—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current with digital control
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0025—Arrangements for modifying reference values, feedback values or error values in the control loop of a converter
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Power Engineering (AREA)
- Mathematical Optimization (AREA)
- General Engineering & Computer Science (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Analysis (AREA)
- Computational Mathematics (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Evolutionary Computation (AREA)
- Biomedical Technology (AREA)
- Artificial Intelligence (AREA)
- Molecular Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Health & Medical Sciences (AREA)
- Operations Research (AREA)
- Biophysics (AREA)
- Algebra (AREA)
- Databases & Information Systems (AREA)
- Feedback Control In General (AREA)
- Dc-Dc Converters (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于电力电子变换器控制技术领域,更具体地,涉及一种合成变量反馈的电力电子变换器控制方法。The invention belongs to the technical field of power electronic converter control, and more particularly relates to a power electronic converter control method with synthetic variable feedback.
背景技术Background technique
电力电子变换器是光伏发电、风力发电等新能源领域的重要组成部分,其控制技术是获得高质量电能,保障系统稳定运行的关键。Power electronic converters are an important part of new energy fields such as photovoltaic power generation and wind power generation. Its control technology is the key to obtaining high-quality electric energy and ensuring the stable operation of the system.
目前,国内外关于电力电子变换器的控制方法主要有PI控制、PR控制、重复控制等控制方法,这些方法都是基于专家知识进行设计的。例如,名为“一种基于模糊PI算法的微电网并网逆变器的控制方法”,公开号CN103956769A,公开日2016年1月13日的中国专利申请,针对微电网并网逆变器,通过模糊算法在线调整PI控制器的控制参数,修正后的PI控制器控制逆变器输出电流,实现逆变器输出电流快速精确控制;名为“三相LCL型并网逆变器的基于重复PR控制的电流双环控制方法”,公开号CN105762801B,公开日2018年11月30日的中国专利申请,对并网电流外环采用重复PR控制,电容电流内环采用PI控制,实现对三相LCL型并网逆变器的高性能控制。该类电力电子变换器的控制方法目前已得到广泛应用,但设计过程复杂,控制器的参数设置高度依赖精确建模,需要设计人员具有专家知识,且控制器参数一旦确定就很难适应不同工况下的需求。At present, the control methods of power electronic converters at home and abroad mainly include PI control, PR control, repetitive control and other control methods, which are designed based on expert knowledge. For example, a Chinese patent application titled "A Control Method of Microgrid Grid-connected Inverter Based on Fuzzy PI Algorithm", publication number CN103956769A, published on January 13, 2016, for microgrid grid-connected inverters, The control parameters of the PI controller are adjusted online through the fuzzy algorithm, and the corrected PI controller controls the output current of the inverter to achieve fast and precise control of the output current of the inverter. PR-controlled current double-loop control method", publication number CN105762801B, Chinese patent application dated November 30, 2018, using repeated PR control for the outer loop of grid-connected current, and PI control for the inner loop of capacitor current to realize the control of three-phase LCL High-performance control of grid-connected inverters. The control method of this type of power electronic converter has been widely used at present, but the design process is complex, the parameter setting of the controller is highly dependent on accurate modeling, requiring the designer to have expert knowledge, and once the controller parameters are determined, it is difficult to adapt to different applications. the needs of the situation.
为提升电力电子变换器的控制性能,其中一种思路是用神经网络进行离线训练,使其能适应多种电路工况,再将训练好的网络用于实时控制。例如名为《Weighting FactorDesign in Model Predictive Control of Power Electronic Converters:AnArtificial Neural Network Approach》的文献提出了一种用神经网络拟合计算变换器模型预测控制中成本函数权重因子的控制方法,利用神经网络替代了控制器的部分功能;名为《A Neural-Network-Based Space-Vector PWM Controller for Voltage-FedInverter Induction Motor Drive》的文献提出了一种利用神经网络拟合空间矢量调制的方法,替代了传统空间矢量调制复杂的在线计算过程;名为《A Back-Propagation NeutralNetwork based Explicit Model Predictive Control for DC-DC converters withHigh Switching Frequency》的文献提出了一种使用神经网络拟合离线模型预测控制规律的方法,采用一个神经网络实现了对Buck电路的高性能控制。该类电力电子变换器的智能控制方法可以满足电力电子变换变换器在不同工况下的控制需求,但需要在变换器投入使用之前先通过仿真或者实验采集数据来训练神经网络,再将训练好的神经网络投入使用;高度依赖电力电子变换器的专家知识,离线训练好的神经网络在投入使用后无法修改,因此必须事先考虑到所有可能出现的问题,对变换器的模型精度要求很高,对没有考虑到的变换器运行过程中的突发情况处理能力有限;控制器分立处理电路的各个状态变量(反馈量),没有考虑到反馈量之间的关系,导致神经网络训练过程复杂,计算量大。In order to improve the control performance of the power electronic converter, one of the ideas is to use the neural network for offline training, so that it can adapt to a variety of circuit conditions, and then use the trained network for real-time control. For example, a document named "Weighting FactorDesign in Model Predictive Control of Power Electronic Converters: AnArtificial Neural Network Approach" proposes a control method that uses neural network fitting to calculate the cost function weight factor in model predictive control of converters. Part of the functions of the controller; the document named "A Neural-Network-Based Space-Vector PWM Controller for Voltage-FedInverter Induction Motor Drive" proposes a method of fitting space vector modulation using neural networks, replacing the traditional space The complex online calculation process of vector modulation; the document titled "A Back-Propagation NeutralNetwork based Explicit Model Predictive Control for DC-DC converters with High Switching Frequency" proposes a method of using a neural network to fit an offline model predictive control law. A neural network enables high-performance control of the Buck circuit. The intelligent control method of this type of power electronic converter can meet the control requirements of the power electronic converter under different working conditions, but it is necessary to collect data through simulation or experiment to train the neural network before the converter is put into use. It is highly dependent on the expert knowledge of power electronic converters. The neural network trained offline cannot be modified after it is put into use. Therefore, all possible problems must be considered in advance, and the accuracy of the converter model is very high. The ability to handle unexpected situations during the operation of the converter that is not considered is limited; the controller discretely processes each state variable (feedback amount) of the circuit, and does not consider the relationship between the feedback amounts, resulting in a complex neural network training process and computational complexity. large.
为进一步实现增强控制器的适应能力,具有在线自学习能力的控制方法逐渐受到关注。名为《DSP-Based Probabilistic Fuzzy Neural Network Control for Li-IonBattery Charger》的文献提出了一种使用概率模糊神经网络控制两级式充电器的方法,通过神经网络的在线学习实现了锂电池组恒流恒压充电的平稳过渡。名为《Design ofAdaptive Control and Fuzzy Neural Network Control for Single-Stage BoostInverter》的文献提出了一种基于自适应模糊神经网络的直流变换器的电压跟踪方法,可以在只需要误差信息的情况下,利用模糊神经网络在线学习实现电压跟踪。名为《Controller Design for Electrical Drives by Deep Reinforcement Learning-aProof of Concept》的文献提出了一种基于深度强化学习的电机驱动控制器的设计方法,可以在完全不需要电机模型和电路专家知识的情况下,通过试错学习实现高性能控制。现有的在线自学习控制方法没有充分利用电力电子变换器的基本知识,仅在实时运行过程中通过试错在线总结经验,不断优化控制器,这导致了神经网络十分复杂,在线训练过程长,计算量大,难以投入实际应用。神经网络在线训练时使用链式法则进行反向传播的过程中需要对逆变器的数学模型求偏导,但在线自学习控制方法一般不考虑变换器的数学模型,通常忽略或简化此步骤,在某些工况下会使得神经网络修改方向出现偏差,影响控制性能,增大了计算负担。In order to further enhance the adaptability of the controller, control methods with online self-learning ability have gradually attracted attention. The document named "DSP-Based Probabilistic Fuzzy Neural Network Control for Li-IonBattery Charger" proposes a method for controlling a two-stage charger using a probabilistic fuzzy neural network, and realizes the constant current of the lithium battery pack through the online learning of the neural network. Smooth transition of constant voltage charging. The paper named "Design of Adaptive Control and Fuzzy Neural Network Control for Single-Stage BoostInverter" proposes a voltage tracking method for DC converters based on adaptive fuzzy neural network, which can use fuzzy Neural network online learning to achieve voltage tracking. The paper titled "Controller Design for Electrical Drives by Deep Reinforcement Learning-a Proof of Concept" proposes a design method for motor drive controllers based on deep reinforcement learning, which can completely eliminate the need for motor model and circuit expert knowledge , to achieve high-performance control through trial-and-error learning. The existing online self-learning control methods do not make full use of the basic knowledge of power electronic converters, and only summarize experience online through trial and error during real-time operation, and continuously optimize the controller, which leads to a very complex neural network and a long online training process. The amount of calculation is large, and it is difficult to put into practical application. In the process of using the chain rule for back-propagation in the online training of neural networks, it is necessary to obtain partial derivatives of the mathematical model of the inverter, but the online self-learning control method generally does not consider the mathematical model of the inverter, and this step is usually ignored or simplified. In some working conditions, the modification direction of the neural network will be deviated, which will affect the control performance and increase the computational burden.
综上所述,传统控制方法高度依赖专家知识,难以适应不同工况下的需求。具有自学习能力的智能控制方法具有更强的灵活性,自适应能力强,能满足电力电子变换器在不同应用场景下的需求,但仍有以下不足之处:(1)离线训练的神经网络控制器仍然高度依赖专家知识,对电路模型精确度要求很高,神经网络的训练和电路的控制分立进行,对电路中突发情况处理能力有限。(2)在线训练的神经网络控制器完全不利用变换器的基本专家知识,仅在实时运行中通过试错总结经验,自动寻找最优控制策略,神经网络十分复杂,计算量极大,很难实时实现。To sum up, the traditional control method is highly dependent on expert knowledge, and it is difficult to adapt to the needs of different working conditions. The intelligent control method with self-learning ability has stronger flexibility and strong adaptive ability, and can meet the needs of power electronic converters in different application scenarios, but it still has the following shortcomings: (1) Neural network trained offline The controller is still highly dependent on expert knowledge, and has high requirements on the accuracy of the circuit model. The training of the neural network and the control of the circuit are carried out separately, and the ability to handle emergencies in the circuit is limited. (2) The neural network controller trained online does not use the basic expert knowledge of the converter at all. It only summarizes experience through trial and error in real-time operation, and automatically finds the optimal control strategy. The neural network is very complex, the amount of calculation is huge, and it is difficult to Real-time implementation.
发明内容SUMMARY OF THE INVENTION
针对现有技术的以上缺陷或改进需求,本发明提供了一种合成变量反馈的电力电子变换器控制方法,其目的在于解决现有在线自学习能力的控制方法由于完全不利用变换器的基本专家知识,仅在实时运行中通过试错总结经验,寻找最优控制策略,而造成神经网络复杂,计算量极大,很难实时实现的技术问题。In view of the above defects or improvement requirements of the prior art, the present invention provides a power electronic converter control method with synthetic variable feedback, which aims to solve the problem that the existing control method with online self-learning capability does not use the basic experts of the converter at all. Knowledge, only by summing up experience through trial and error in real-time operation, to find the optimal control strategy, which causes the technical problem of complex neural network, huge amount of calculation, and difficult to realize in real time.
为实现上述目的,本发明提供了一种合成变量反馈的电力电子变换器控制方法,包括:In order to achieve the above object, the present invention provides a power electronic converter control method with synthetic variable feedback, including:
S1.根据电力电子变换器的电路结构建立电力电子变换器的数学模型;S1. Establish a mathematical model of the power electronic converter according to the circuit structure of the power electronic converter;
S2.设定控制目标的给定量,基于电力电子变换器的数学模型构建给定量和控制目标的误差方程,并对所述误差方程进行离散化;S2. Set the given quantity of the control target, construct the given quantity and the error equation of the control target based on the mathematical model of the power electronic converter, and discretize the error equation;
S3.以误差最小为目标构建神经网络,所述神经网络的输入为关于误差、状态变量、输入变量和给定量的函数,其函数结构根据误差方程离散结果第一部分的函数结构确定;所述神经网络的输出为控制变量;其中,误差方程离散结果第一部分为关于误差、状态变量、输入变量和给定量的函数;第二部分为关于控制变量的函数;S3. Construct a neural network with the goal of minimum error, the input of the neural network is a function about error, state variable, input variable and a given amount, and its functional structure is determined according to the functional structure of the first part of the discrete result of the error equation; The output of the network is the control variable; wherein, the first part of the discrete result of the error equation is a function of error, state variable, input variable and a given quantity; the second part is a function of the control variable;
S4.采集电力电子变换器当前时刻的误差和状态变量;S4. Collect the error and state variables of the power electronic converter at the current moment;
S5.判断当前时刻的误差和状态变量是否满足变压器安全运行保护条件;若满足保护满足条件,则采取保护措施确保变换器安全运行;否则,利用当前时刻神经网络输出的控制变量,对变换器进行控制;S5. Determine whether the error and state variables at the current moment meet the protection conditions for the safe operation of the transformer; if the protection meets the conditions, take protective measures to ensure the safe operation of the converter; otherwise, use the control variables output by the neural network at the current moment to perform control;
S6.判断当前时刻误差是否满足学习条件;若是,则根据神经网络的目标函数计算并更新神经网络参数;若否,则下一时刻神经网络参数沿用当前时刻参数;S6. Determine whether the error at the current moment satisfies the learning conditions; if so, calculate and update the neural network parameters according to the objective function of the neural network; if not, the neural network parameters at the next moment use the parameters at the current moment;
S7.重复步骤S4-S6,直至电力电子变换器当前时刻的误差达到设定阈值;S7. Repeat steps S4-S6 until the error at the current moment of the power electronic converter reaches the set threshold;
S8.利用神经网络输出的控制变量,对变换器进行控制。S8. Use the control variable output by the neural network to control the converter.
进一步地,电力电子变换器的数学模型为以下表达式:Further, the mathematical model of the power electronic converter is the following expression:

其中,X为电路中的状态变量,U为控制变量,Z为电路输入变量,Y为控制目标,C为参数矩阵。Among them, X is the state variable in the circuit, U is the control variable, Z is the circuit input variable, Y is the control target, and C is the parameter matrix.
进一步地,控制目标给定量和控制目标的误差方程表达式如下:Further, the given quantity of the control target and the error equation of the control target are expressed as follows:

其中,e为控制目标的给定量和控制目标的差,Y*为控制目标的给定量。Among them, e is the difference between the given quantity of the control target and the control target, and Y* is the given quantity of the control target.
进一步地,误差方程的离散结果划分为两部分,结果如下:Further, the discrete results of the error equation are divided into two parts, and the results are as follows:
e[k+1]=g1(e[k],Y*[k],X[k],Z[k])+g2(U[k]))e[k+1]=g1 (e[k],Y* [k],X[k],Z[k])+g2 (U[k]))
其中,g1()是关于误差e、状态变量X、输入变量Z和给定量Y*的函数,g2()是关于控制变量U的函数,k表示时刻。Among them, g1 () is a function of error e, state variable X, input variable Z and given quantity Y* , g2 () is a function of control variable U, and k represents time.
进一步地,神经网络结构为:Further, the neural network structure is:
U[k]=πθ(H[k])U[k]=πθ (H[k])
其中,H[k]为神经网络输入量,U[k]为神经网络的输出,对应k时刻的控制变量,θ为神经网络中待学习的参数。Among them, H[k] is the input of the neural network, U[k] is the output of the neural network, corresponding to the control variable at time k, and θ is the parameter to be learned in the neural network.
进一步地,神经网络的目标函数为:Further, the objective function of the neural network is:

其中,m表示误差函数J包含的误差e的项数,ri表示第i项的权重。Among them, m represents the number of terms of error e included in the error function J, and ri represents the weight of thei -th term.
进一步地,保护条件为:Further, the protection conditions are:

其中,p[k]=0表示不满足保护条件,p[k]=1表示满足保护条件,X[k]表示k时刻状态变量,Xmax表示状态变量最大值,e[k]表示k时刻误差,emax表示误差最大值。Among them, p[k]=0 means that the protection condition is not met, p[k]=1 means that the protection condition is met, X[k] means the state variable at time k, Xmax means the maximum value of the state variable, and e[k] means time k error, emax represents the maximum error value.
进一步地,学习条件为:Further, the learning conditions are:

其中,l[k]=0表示不满足学习条件,l[k]=1表示满足学习条件。Wherein, l[k]=0 means that the learning condition is not met, and l[k]=1 means that the learning condition is met.
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果。In general, compared with the prior art, the above technical solutions conceived by the present invention can achieve the following beneficial effects.
(1)本发明在控制过程中加入保护条件和学习条件,即保障了变换器的安全稳定运行,又能灵活地设计优化目标,适用范围广泛;具体地,设置保护条件,在误差较大的动态过程采用简单有效的控制方法(例如滞环控制),保障变换器安全稳定运行,达到稳态过程后进行自适应学习,提升了控制性能;在自学习过程中加入学习条件,仅需在控制性能未达到设定目标(即满足学习条件)时进行在线学习,优化控制器;在控制性能达到设定目标后即停止在线学习,减少了计算成本,容易实现。(1) The present invention adds protection conditions and learning conditions in the control process, which ensures the safe and stable operation of the converter, flexibly designs optimization targets, and has a wide range of applications; Simple and effective control methods (such as hysteresis control) are used in the dynamic process to ensure the safe and stable operation of the converter, and adaptive learning is performed after the steady state process is reached, which improves the control performance; adding learning conditions in the self-learning process only needs to be When the performance does not reach the set target (that is, the learning conditions are met), online learning is performed to optimize the controller; after the control performance reaches the set target, the online learning is stopped, which reduces the computational cost and is easy to implement.
(2)本发明只需要利用电路基本知识对电力电子变换器进行建模,模型包含所有必要变量即可,无需获得准确参数,实时运行过程中神经网络会通过自学习修正模型中参数的影响,对模型的精确度要求不高,不过分依赖专家知识。(2) The present invention only needs to use the basic knowledge of the circuit to model the power electronic converter, and the model contains all necessary variables, and it is not necessary to obtain accurate parameters. During the real-time operation, the neural network will correct the influence of the parameters in the model through self-learning, The accuracy of the model is not high, and it does not rely too much on expert knowledge.
(3)本发明利用变换器的基本模型确保了自学习过程中优化方向的正确性,提升了控制性能,缩短了试错时间。(3) The present invention utilizes the basic model of the converter to ensure the correctness of the optimization direction in the self-learning process, improves the control performance, and shortens the trial and error time.
(4)本发明利用基本电路知识,将电路中的多个状态变量按照实际关系组合起来描述变换器的运行环境,减轻了神经网络分辨各状态变量之间关系的负担,对环境的描述更全面,神经网络通过在线学习优化控制器在运行环境中的控制性能,能适应更广范围内的控制需求。(4) The present invention uses basic circuit knowledge to combine multiple state variables in the circuit according to the actual relationship to describe the operating environment of the converter, which reduces the burden of the neural network to distinguish the relationship between the state variables, and provides a more comprehensive description of the environment. , the neural network optimizes the control performance of the controller in the operating environment through online learning, and can adapt to a wider range of control needs.
附图说明Description of drawings
图1是本发明提供的单相并网逆变器电路图;1 is a circuit diagram of a single-phase grid-connected inverter provided by the present invention;
图2是本发明提供的针对于并网逆变器的控制方法流程图;2 is a flowchart of a control method for a grid-connected inverter provided by the present invention;
图3是本发明提供的神经网络结构图;Fig. 3 is the neural network structure diagram provided by the present invention;
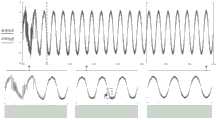
图4是采用本发明方法对并网变换器进行电流控制得到的仿真波形图。FIG. 4 is a simulation waveform diagram obtained by using the method of the present invention to control the current of the grid-connected converter.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as there is no conflict with each other.
本发明提供了一种合成变量反馈的电力电子变换器控制方法,包括:The invention provides a power electronic converter control method with synthetic variable feedback, comprising:
S1.根据电力电子变换器的电路结构建立电力电子变换器的数学模型;电力电子变换器的数学模型为以下表达式:S1. Establish a mathematical model of the power electronic converter according to the circuit structure of the power electronic converter; the mathematical model of the power electronic converter is the following expression:

其中,X为电路中的状态变量,U为控制变量,Z为电路输入变量,Y为控制目标,C为参数矩阵。Among them, X is the state variable in the circuit, U is the control variable, Z is the circuit input variable, Y is the control target, and C is the parameter matrix.
S2.设定控制目标的给定量,基于电力电子变换器的数学模型构建给定量和控制目标的误差方程,并对所述误差方程进行离散化;S2. Set the given quantity of the control target, construct the given quantity and the error equation of the control target based on the mathematical model of the power electronic converter, and discretize the error equation;
控制目标给定量根据控制需求设计,控制目标给定量Y*和控制目标Y的差定义为误差e;The given quantity of the control target is designed according to the control requirements, and the difference between the given quantity of the control target Y* and the control target Y is defined as the error e;
e=Y*-Y (2)e=Y* -Y(2)
结合式(1),得到误差方程表达式如下:Combined with formula (1), the error equation is obtained as follows:

对误差方程进行离散化得到:Discretizing the error equation yields:
e[k+1]=f″(e[k],Y*[k],X[k],U[k]) (4)e[k+1]=f″(e[k],Y* [k],X[k],U[k]) (4)
S3.以误差最小为目标构建神经网络,并根据误差方程离散结果第一部分的函数结构确定所述神经网络输入量的结构;其中,误差方程离散结果被划分为两部分;第一部分为关于误差、状态变量、输入变量和给定量的函数;第二部分为关于控制变量的函数;S3. Construct a neural network with the goal of minimizing the error, and determine the structure of the input quantity of the neural network according to the functional structure of the first part of the error equation discrete result; wherein, the error equation discrete result is divided into two parts; the first part is about the error, The function of state variables, input variables and given quantities; the second part is the function of control variables;
误差方程的离散结果划分为两部分,结果如下:The discrete results of the error equation are divided into two parts, and the results are as follows:
e[k+1]=g1(e[k],Y*[k],X[k],Z[k])+g2(U[k])) (5)e[k+1]=g1 (e[k],Y* [k],X[k],Z[k])+g2 (U[k])) (5)
其中,g1()是关于误差e、状态变量X、输入变量Z和给定量Y*的函数,可从电力电子变换器或控制系统中直接获得;g2()是关于控制变量U的函数。Among them, g1 () is a function of error e, state variable X, input variable Z and given quantity Y* , which can be obtained directly from the power electronic converter or control system; g2 () is a function of control variable U .
设计神经网络,输入量为H[k],参考g1确定H[k]中元素h1[k]、h2[k]、h3[k]的结构,以减轻神经网络分辨各个变量的关系的压力,输出为k时刻的控制变量U[k];Design a neural network, the input is H[k], and the structure of elements h1 [k], h2 [k], and h3 [k] in H[k] is determined with reference to g1 , so as to reduce the need for the neural network to distinguish each variable. The pressure of the relationship, the output is the control variable U[k] at time k;

U[k]=πθ(H[k]) (7)U[k]=πθ (H[k]) (7)
其中,θ为神经网络中待学习的参数。Among them, θ is the parameter to be learned in the neural network.
按照误差e最小的原则,设计神经网络的目标函数J,其中,误差函数J包含的误差e的项数m和每项权重ri可根据实际情况设定;According to the principle that the error e is the smallest, the objective function J of the neural network is designed, wherein the number of items m of the error e included in the error function J and the weightri of each item can be set according to the actual situation;

S4.采集电力电子变换器当前时刻的误差和状态变量;S4. Collect the error and state variables of the power electronic converter at the current moment;
S5.判断当前时刻的误差和状态变量是否满足变压器安全运行保护条件;若满足保护条件,则采取保护措施确保变换器安全运行;否则,利用当前时刻神经网络输出的控制变量,对变换器进行控制;S5. Determine whether the error and state variables at the current moment meet the protection conditions for the safe operation of the transformer; if the protection conditions are met, take protective measures to ensure the safe operation of the converter; otherwise, use the control variables output by the neural network at the current moment to control the converter ;
保护措施包括滞环控制、关机等。保护条件为:Protection measures include hysteresis control, shutdown, etc. The protection conditions are:

其中,p[k]=0表示不满足保护条件,p[k]=1表示满足保护条件,X[k]表示k时刻状态变量,Xmax表示状态变量最大值,e[k]表示k时刻误差,emax表示误差最大值。Among them, p[k]=0 means that the protection condition is not met, p[k]=1 means that the protection condition is met, X[k] means the state variable at time k, Xmax means the maximum value of the state variable, and e[k] means time k error, emax represents the maximum error value.
S6.判断当前时刻误差是否满足学习条件;若是,则根据神经网络的目标函数计算并更新神经网络参数;若否,则下一时刻神经网络参数沿用当前时刻参数;S6. Determine whether the error at the current moment satisfies the learning conditions; if so, calculate and update the neural network parameters according to the objective function of the neural network; if not, the neural network parameters at the next moment use the parameters at the current moment;
学习条件为:The learning conditions are:

其中,l[k]=0表示不满足学习条件,l[k]=1表示满足学习条件;若l[k]=0,则k+1时刻神经网络的参数沿用k时刻参数;如果为l[k]=1,对目标函数J求神经网络参数θ的偏导,按照式(12)计算并更新神经网络参数θ;Among them, l[k]=0 means that the learning conditions are not met, and l[k]=1 means that the learning conditions are met; if l[k]=0, the parameters of the neural network at time k+1 use the parameters at time k; if it is l [k]=1, find the partial derivative of the neural network parameter θ for the objective function J, and calculate and update the neural network parameter θ according to formula (12);


其中η为学习率;where η is the learning rate;
S7.重复步骤S4-S6,直至误差满足设定阈值;S7. Repeat steps S4-S6 until the error meets the set threshold;
S8.利用神经网络输出的控制变量,对变换器进行控制。S8. Use the control variable output by the neural network to control the converter.
本发明实施例以如图1所示的单向并网逆变器为例,对本发明方法的实施过程进行详细介绍,具体实施过程参考图2;The embodiment of the present invention takes the unidirectional grid-connected inverter shown in FIG. 1 as an example to introduce the implementation process of the method of the present invention in detail, and the specific implementation process refers to FIG. 2 ;
步骤1.分析并网逆变器电路关系可得到并网逆变器的数学模型,其中iL为逆变器输出电流,L为输出电感,Vgrid为电网电压,VDC为直流母线电压,VAB为逆变器输出电压,d代表AB两个桥臂的占空比,其中0<d<1表示一个开关周期内A桥臂上管导通B桥臂下管导通,占空比等于d;-1<d<0表示一个开关周期内B桥臂上管导通A桥臂下管导通,占空比等于-d。对照式(1),该实施例中iL为电路状态变量X,d为控制变量U,Vgrid为输入变量Z,控制目标Y为输出电流iL:

步骤2.逆变器的控制目标为输出电流iL,iL的参考量为


结合式(13)列出误差ΔiL的方程:Combined with equation (13), the equation of error ΔiL is listed:

将上述误差方程离散化:Discretize the above error equation:

其中,Ts为开关周期。Among them, Ts is the switching period.
步骤3.将误差方程划分成g1和g2两部分,其中,g1是关于误差ΔiL、电网电压Vgrid和给定量
△iL[k+1]=g1[k]+g2[k] (17)△iL [k+1]=g1 [k]+g2 [k] (17)


参考g1的形式,采用专家知识设计神经网络输入量H[k],其中α1~α4为每一项的系数,这些系数可按照实际电路参数进行粗略估计:Referring to the form of g1 , the input quantity H[k] of the neural network is designed using expert knowledge, where α1 to α4 are the coefficients of each item, and these coefficients can be roughly estimated according to the actual circuit parameters:

选取径向基神经网络作为智能控制函数,按照图3所示的结构,神经网络分为输入层、隐藏层和输出层3层。输入层的数据为k时刻的合成量H[k],隐藏层含有n个神经元,激活函数采用径向基函数,输出层的数据为控制变量d[k],其中μi是径向基函数的中心值,按专家知识设定,定义θ为wi、b、δi这些可调整的神经网络参数的集合:The radial basis neural network is selected as the intelligent control function. According to the structure shown in Figure 3, the neural network is divided into three layers: input layer, hidden layer and output layer. The data of the input layer is the synthetic quantity H[k] at time k, the hidden layer contains n neurons, the activation function adopts the radial basis function, and the data of the output layer is the control variable d[k], where μi is the radial basis The central value of the function is set according to expert knowledge, and θ is defined as a set of adjustable neural network parameters such as wi , b and δi :

θ={w1~wn,δ1~δn,b} (22)θ={w1 ~wn ,δ1 ~δn ,b} (22)
按照使误差ΔiL最小的原则,设计神经网络的目标函数J,该实施例中J只包含k时刻的误差ΔiL[k],权重为1;According to the principle of minimizing the error ΔiL , the objective function J of the neural network is designed. In this embodiment, J only includes the error ΔiL [k] at time k, and the weight is 1;

步骤4.采集k时刻的电流误差ΔiL[k];Step 4. Collect the current error ΔiL [k] at time k;
步骤5.将k时刻的电流误差ΔiL[k]作为保护判据,计算保护条件p[k],不满足保护条件时,保护条件输出为0,满足保护条件时,保护条件输出为1:Step 5. Use the current error ΔiL [k] at time k as the protection criterion, and calculate the protection condition p[k]. When the protection condition is not satisfied, the protection condition output is 0, and when the protection condition is satisfied, the protection condition output is 1:

若p[k]=1,则按照式(25)的滞环控制方法计算k时刻控制变量d[k]并送入控制器参与k时刻的控制;若p[k]=0,则k时刻神经网络输出的控制变量d[k]并送入控制器参与k时刻的控制:If p[k]=1, calculate the control variable d[k] at time k according to the hysteresis control method of formula (25) and send it to the controller to participate in the control at time k; if p[k]=0, then time k The control variable d[k] output by the neural network is sent to the controller to participate in the control at time k:

步骤6.设计学习条件l[k],不满足学习条件时,学习条件输出为0,满足学习条件时,学习条件输出为1;本发明实例设计了两条学习条件,学习条件1表示若k时刻刚好满足了保护条件,则k时刻需要在线训练神经网络,使控制器在下一次遇到同样状态时误差减小,l[k]输出为1;学习条件2表示若连续两基波周期不再满足保护条件,则说明变换器可以安全稳定运行,需要进一步优化控制性能,l[k]输出为1:Step 6. Design the learning condition l[k], when the learning condition is not satisfied, the learning condition output is 0, and when the learning condition is satisfied, the learning condition output is 1; the example of the present invention has designed two learning conditions, and the

若l[k]=0,则无需更新神经网络参数;If l[k]=0, there is no need to update the neural network parameters;
若l[k]=1,则对目标函数J求wi、b、δi这些可调整的神经网络参数的偏导,J对θ的偏导为J对wi、b、δi偏导的集合,如式(30)所示,:If l[k]=1, then find the partial derivatives of the adjustable neural network parameterswi , b,δi for the objective function J, and the partial derivatives of J with respect to θ are the partial derivatives of J with respect towi , b,δi The set of , as shown in formula (30),:




若l[k]=1,且满足学习条件1,则按照式(27)-式(31)更新神经网络的参数集θ:If l[k]=1, and the

若中l[k]=1,且满足学习条件2,则记录并筛选半个基波周期内误差Δi最大的时刻m以及计算J[m]所需的ΔiL[m-1]、

至此已完成了单向并网逆变器k时刻的控制。So far, the control of the one-way grid-connected inverter at time k has been completed.
图4为采用本发明方法对并网变换器进行电流控制得到的仿真波形图,第一阶段,图4左边部分波形图,控制器刚开始学习,输出电流误差较大时满足保护条件,使得输出电流误差迅速减小,满足学习条件1时更新神经网络参数,此时变换器波形波动剧烈,但仍在变换器的安全运行范围内;第二阶段,图4中间部分波形图,经历了一段时间的学习,控制器误差明显减小,不再满足保护条件,开始按照学习条件2每半个基波周期学习并更新一次神经网络参数;第三阶段,图4右边部分波形图,控制器通过自学习实现了并网电流跟踪参考值。Figure 4 is a simulation waveform diagram obtained by using the method of the present invention to control the current of the grid-connected converter. In the first stage, the waveform diagram on the left side of Figure 4, the controller just begins to learn, and the protection condition is met when the output current error is large, so that the output The current error decreases rapidly, and the neural network parameters are updated when the
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。Those skilled in the art can easily understand that the above are only preferred embodiments of the present invention, and are not intended to limit the present invention. Any modifications, equivalent replacements and improvements made within the spirit and principles of the present invention, etc., All should be included within the protection scope of the present invention.
Claims (8)





Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010576571.5ACN112072893B (en) | 2020-06-22 | 2020-06-22 | Power electronic converter control method with synthesized variable feedback |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010576571.5ACN112072893B (en) | 2020-06-22 | 2020-06-22 | Power electronic converter control method with synthesized variable feedback |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112072893Atrue CN112072893A (en) | 2020-12-11 |
| CN112072893B CN112072893B (en) | 2022-03-29 |
Family
ID=73657138
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010576571.5AActiveCN112072893B (en) | 2020-06-22 | 2020-06-22 | Power electronic converter control method with synthesized variable feedback |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112072893B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113131771A (en)* | 2021-04-25 | 2021-07-16 | 合肥工业大学 | Inverter optimization control method based on reinforcement learning |
| CN113824193A (en)* | 2021-10-27 | 2021-12-21 | 四川大学 | Impedance matching method, apparatus, reinforcement learning controller, and computer-readable storage medium |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102832621A (en)* | 2012-09-18 | 2012-12-19 | 河海大学常州校区 | Adaptive RBF (radial basis function) neural network control technique for three-phase parallel active filters |
- 2020
- 2020-06-22CNCN202010576571.5Apatent/CN112072893B/enactiveActive
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102832621A (en)* | 2012-09-18 | 2012-12-19 | 河海大学常州校区 | Adaptive RBF (radial basis function) neural network control technique for three-phase parallel active filters |
Non-Patent Citations (3)
| Title |
|---|
| 何益宏等: "基于径向基神经网络滞环电流跟踪控制的有源电力滤波器", 《华北水利水电学院学报》* |
| 洪喜等: "基于径向基函数网络的光电编码器误差补偿法", 《光学精密工程》* |
| 韩晓新等: "基于改进滞环电流控制策略的有源电力滤波器", 《控制工程》* |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113131771A (en)* | 2021-04-25 | 2021-07-16 | 合肥工业大学 | Inverter optimization control method based on reinforcement learning |
| CN113131771B (en)* | 2021-04-25 | 2022-09-27 | 合肥工业大学 | Inverter optimization control method based on reinforcement learning |
| CN113824193A (en)* | 2021-10-27 | 2021-12-21 | 四川大学 | Impedance matching method, apparatus, reinforcement learning controller, and computer-readable storage medium |
| CN113824193B (en)* | 2021-10-27 | 2023-05-23 | 四川大学 | Impedance matching method, apparatus, reinforcement learning controller, and computer-readable storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112072893B (en) | 2022-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Fei et al. | Fuzzy double hidden layer recurrent neural terminal sliding mode control of single-phase active power filter | |
| Wang et al. | Adaptive type-2 FNN-based dynamic sliding mode control of DC–DC boost converters | |
| Komathi et al. | Design of gray wolf optimizer algorithm-based fractional order PI controller for power factor correction in SMPS applications | |
| CN111371322B (en) | A Boost Converter Control Method and System Based on Finite Time Convergence Observer | |
| CN110048606A (en) | DC-DC boost converter Dynamic sliding mode voltage control method based on two type Adaptive Fuzzy Neural-network of section | |
| Cui et al. | Implementation of transferring reinforcement learning for DC–DC buck converter control via duty ratio mapping | |
| Liu et al. | Extended state observer based interval type-2 fuzzy neural network sliding mode control with its application in active power filter | |
| CN114498958B (en) | Anti-interference system and control method based on wireless power transmission of BUCK circuit | |
| Tao et al. | Variable form LADRC-based robustness improvement for electrical load interface in microgrid: A disturbance response perspective | |
| CN112072893A (en) | A Power Electronic Converter Control Method with Synthetic Variable Feedback | |
| Mohammadzadeh et al. | Application of mixture of experts in machine learning-based controlling of DC-DC power electronics converter | |
| CN119254027B (en) | DAB Optimization Modulation Method Based on Artificial Intelligence and Circuit Transient Behavior | |
| Ehsani et al. | Comparisons between generalized predictive control and linear controllers in multi-input DC-DC boost converter | |
| CN116954072A (en) | A dynamic optimization method of predictive control weight factors based on deep residual network | |
| Yu et al. | Adaptive deep-learning-based steady-state modeling and fast control strategy for CLLC DC-DC converter in highly renewable penetrated system | |
| Waghmare et al. | Sliding mode controller for multiphase bidirectional flyback converter topology in hybrid electric vehicle applications | |
| CN115987086A (en) | Single-switch DC-DC converter on-line control method based on neural network | |
| CN116449682A (en) | A BP neural network PI parameter self-tuning method for three-phase PWM rectifier | |
| CN111711366A (en) | A fuzzy control method for a dual-active full-bridge DC-DC converter | |
| CN102185508A (en) | Pulse-width modulation (PWM) inverted power supply system and algorithm based on fuzzy predictive control technology | |
| CN110518625A (en) | A kind of gird-connected inverter DC component suppressing method of variable learning rate BP-PID control | |
| Wu et al. | An innovative deep reinforcement learning controller for dc/dc dab converters based on deep deterministic policy gradient | |
| Li | Applications of artificial intelligence in the circuit and modulation design of DC-DC converters | |
| Rakin et al. | Enhanced Isolated Bidirectional Resonant DC-DC Converter with Artificial Neural Network Control for Electric Vehicle Onboard Chargers | |
| Ren et al. | Deep reinforcement learning-based power flow control for triple active bridge converter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |