CN112013726B - An integrated design method for fully strapdown guidance and control based on a third-order model - Google Patents
An integrated design method for fully strapdown guidance and control based on a third-order modelDownload PDFInfo
- Publication number
- CN112013726B CN112013726BCN202010866153.XACN202010866153ACN112013726BCN 112013726 BCN112013726 BCN 112013726BCN 202010866153 ACN202010866153 ACN 202010866153ACN 112013726 BCN112013726 BCN 112013726B
- Authority
- CN
- China
- Prior art keywords
- missile
- design
- guidance
- angle
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/01—Arrangements thereon for guidance or control
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar Systems Or Details Thereof (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于航空航天领域,涉及一种制导控制一体化设计方法,具体涉及一种基于三阶模型的考虑全捷联导引头视场约束的制导控制一体化设计方法。The invention belongs to the field of aerospace, and relates to a guidance and control integrated design method, in particular to a guidance and control integrated design method based on a third-order model considering the constraints of a full strapdown seeker field of view.
背景技术Background technique
开展全捷联探测制导体制下的制导控制一体化设计研究对发展低成本、高性能战术导弹具有十分重要的意义。全捷联制导控制一体化设计中的一个重要问题是处理导引头视场约束。从所建立的制导控制一体化设计模型角度看,目前该领域的主要进展包括四阶模型方法和二阶模型方法。四阶模型方法以文献1“考虑全捷联导引头视场约束的制导控制一体化设计方法,中国,2017-01-13,CN201710023831.4”和文献2“考虑全捷联导引头视场约束的三维制导控制一体化设计方法,中国,2019-01-29,CN2019100834420.3”为代表。这类方法以体视线角、视线角速率、攻角(侧滑角、滚转角)和俯仰(偏航、滚转)角速率为作为四阶模型的状态变量。这类方法主要存在两个问题:一是将俯仰(偏航)角速率这些状态变量当作有界干扰处理,缺乏严格的系统稳定性保障;二是模型阶次较高,导致所设计的一体化算法相对复杂。二阶模型方法以文献2“Integrated guidance and control formissile with narrow field-of-view strapdown seeker,ISA Transactions,2020,https://doi.org/10.1016/j.isatra.2020.06.012”为代表。该文献建立了以体视线角及其变化率为状态的二阶制导控制一体化设计模型,通过设计俯仰舵偏角指令使体视线角变化率跟踪负的导弹俯仰角速率信号,从而实现对目标的精确打击。但是,由于导弹俯仰角速率信号并不是一个独立的外部信号,而是直接受俯仰舵偏角指令所控制的,因此,这种设计方法本质上存在控制器的循环设计问题。It is of great significance to carry out the research on the integrated design of guidance and control under the full strapdown detection guidance system for the development of low-cost, high-performance tactical missiles. An important issue in the integrated design of full strapdown guidance and control is to deal with the constraints of the seeker field of view. From the perspective of the established guidance and control integrated design model, the main progress in this field includes the fourth-order model method and the second-order model method. The fourth-order model method is based on document 1 "Guidance and control integrated design method considering the full strapdown seeker field of view constraints, China, 2017-01-13, CN201710023831.4" and
发明内容SUMMARY OF THE INVENTION
为了克服现有基于四阶模型和二阶模型的考虑全捷联导引头视场约束的制导控制一体化设计方法的不足,本发明提供了一种基于三阶模型的全捷联制导控制一体化设计方法。该方法能够实现对目标的精确打击,并确保全捷联导引头视场约束得以满足。In order to overcome the shortcomings of the existing guidance and control integration design methods based on the fourth-order model and the second-order model considering the constraints of the full strapdown seeker field of view, the present invention provides a third-order model-based full strapdown guidance and control integration. Design method. This method can achieve precise strikes on targets and ensure that the constraints of the full strapdown seeker field of view are satisfied.
本发明的目的是通过以下技术方案实现的:The purpose of this invention is to realize through the following technical solutions:
一种基于三阶模型的全捷联制导控制一体化设计方法,包括如下步骤:An integrated design method for full strapdown guidance and control based on a third-order model, comprising the following steps:
第一步、建立三阶制导控制一体化设计模型:The first step is to establish a third-order guidance and control integrated design model:

式中,





第二步、明确考虑全捷联导引头视场约束的制导控制一体化算法的设计任务,具体要求如下:The second step is to clearly consider the design task of the guidance and control integration algorithm considering the constraints of the full strapdown seeker field of view. The specific requirements are as follows:
根据第一步建立的三阶制导控制一体化设计模型,设计导弹的舵偏角指令使导弹速度追踪误差角λ尽快收敛到零,同时保证全捷联导引头视场约束得以满足,即满足:

第三步、构造辅助系统,设计第一层期望虚拟控制量ηd,并将其通过近似饱和函数处理后得到第一层虚拟控制量ηc;The third step is to construct an auxiliary system, design the desired virtual control variable ηd of the first layer, and process it through the approximate saturation function to obtain the virtual control variable ηc of the first layer;
第四步、利用BarrierLyapunov函数,设计第二层虚拟控制量ωzc;The fourth step is to use the BarrierLyapunov function to design the second-layer virtual control quantity ωzc ;
第五步、设计实际舵偏角指令δz;The fifth step, design the actual rudder deflection angle command δz ;
第六步、综合第三至第五步,得到如下考虑全捷联导引头视场约束的制导控制一体化算法:The sixth step, synthesizing the third to fifth steps, the following integrated algorithm of guidance and control considering the constraints of the full strapdown seeker field of view is obtained:

其中,设计参数的取值范围为:ke>0,ε>0,
第七步、检验制导控制一体化算法的性能:The seventh step, check the performance of the guidance and control integration algorithm:
在允许的范围内选择好设计参数后,借助计算机数值计算和仿真软件进行仿真计算并进行性能检验,如果制导控制一体化算法的性能满足要求,则设计结束;否则,需要调整设计参数,重新进行仿真计算并进行性能检验。After selecting the design parameters within the allowable range, use computer numerical calculation and simulation software to carry out simulation calculation and perform performance inspection. If the performance of the integrated guidance and control algorithm meets the requirements, the design ends; otherwise, the design parameters need to be adjusted and re-run Simulation calculation and performance verification.
相比于现有技术,本发明具有如下优点:Compared with the prior art, the present invention has the following advantages:
本发明既克服了现有基于四阶模型的考虑全捷联导引头视场约束的制导控制一体化设计方法由于模型阶次较高导致的控制器复杂性问题以及系统的稳定性问题,同时也避免了基于二阶模型的考虑全捷联导引头视场约束的制导控制一体化设计方法存在的控制器循环设计问题。The present invention not only overcomes the complexity of the controller and the stability of the system caused by the higher model order of the existing guidance and control integrated design method based on the fourth-order model considering the constraints of the full strapdown seeker field of view, and at the same time It also avoids the controller loop design problem existing in the guidance and control integrated design method based on the second-order model considering the full strapdown seeker field of view constraints.
附图说明Description of drawings
图1为本发明基于三阶模型的全捷联制导控制一体化设计流程图;Fig. 1 is the integrated design flow chart of the fully strapdown guidance control based on the third-order model of the present invention;
图2为纵向平面拦截几何关系;Figure 2 shows the geometric relationship of longitudinal plane interception;
图3为弹-目相对距离变化曲线;Figure 3 is the change curve of the relative distance between the projectile and the eye;
图4为导弹速度追踪误差角变化曲线;Figure 4 is the change curve of the missile velocity tracking error angle;
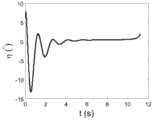
图5为导弹体视线角变化曲线;Figure 5 is the change curve of the line-of-sight angle of the missile body;
图6为导弹俯仰舵偏角变化曲线。Figure 6 shows the change curve of the pitch angle of the missile.
具体实施方式Detailed ways
下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings, but are not limited thereto. Any modification or equivalent replacement of the technical solutions of the present invention without departing from the spirit and scope of the technical solutions of the present invention shall be included in the present invention. within the scope of protection.
本发明提供了一种基于三阶模型的全捷联制导控制一体化设计方法,如图1所示,其设计步骤如下:The present invention provides a fully strap-down guidance and control integrated design method based on a third-order model, as shown in FIG. 1 , and the design steps are as follows:
第一步:建立三阶制导控制一体化设计模型。The first step is to establish a third-order guidance and control integrated design model.
纵向平面内的拦截几何关系如图2所示,其中,M表示导弹,T表示目标,LOS表示视线,ε表示视线倾角,r表示弹-目相对距离,V表示导弹的速度,xb表示导弹弹体纵轴,

根据速度追踪导引原理,为了实现对目标的精确打击,只需使导弹速度方向指向目标飞行,也就是使导弹速度追踪误差角λ尽快收敛到零。因此,取λ作为第一个状态变量,有:According to the principle of speed tracking and guidance, in order to achieve a precise attack on the target, it is only necessary to make the missile speed direction point to the target flight, that is, to make the missile speed tracking error angle λ converge to zero as soon as possible. Therefore, taking λ as the first state variable, we have:

导弹的弹道倾角θ满足如下动态方程:The ballistic inclination angle θ of the missile satisfies the following dynamic equation:

式中,m为导弹质量,P为导弹发动机推力,g为重力加速度,Y为导弹所受升力,



选取导弹的攻角α与俯仰角速率ωz作为状态变量,可以建立导弹的控制系统模型如下:Selecting the attack angle α and the pitch rate ωz of the missile as the state variables, the control system model of the missile can be established as follows:


其中,L表示导弹特征长度,Jz表示导弹绕弹体z轴的转动惯量,
定义


式(6)即为三阶制导控制一体化设计模型。Equation (6) is the integrated design model of the third-order guidance and control.
第二步:明确考虑全捷联导引头视场约束的制导控制一体化算法的设计任务。The second step: the design task of the guidance and control integration algorithm considering the full strapdown seeker field of view constraints is clearly defined.
考虑全捷联导引头视场约束的制导控制一体化算法的设计任务可以描述为:根据制导控制一体化设计模型(6),设计导弹的舵偏角指令使导弹速度追踪误差角λ尽快收敛到零,同时保证全捷联导引头视场约束得以满足,即满足:

第三步:构造辅助系统,设计第一层期望虚拟控制量,并将其通过近似饱和函数处理后得到第一层虚拟控制量。The third step: construct the auxiliary system, design the desired virtual control variable of the first layer, and process it through the approximate saturation function to obtain the virtual control variable of the first layer.
构造辅助系统:Construction assistance system:

其中,ke>0为设计参数,ηd为待求解的第一层期望虚拟控制量,ηc为ηd通过如下饱和近似函数后的输出,即第一层虚拟控制量:Among them,ke > 0 is the design parameter, ηd is the expected virtual control variable of the first layer to be solved, and ηc is the output of ηd after passing through the following saturation approximation function, that is, the virtual control variable of the first layer:

其中,设计参数ε>0,


定义z1=λ-e,则有:Define z1 =λ-e, then we have:

构造第一层期望虚拟控制量为:The expected virtual control quantity of the first layer is constructed as:

其中,k1>0为设计参数;并定义z2=η-ηc,则有:Among them, k1 >0 is the design parameter; and z2 =η-ηc is defined, there are:

定义

第四步:利用BarrierLyapunov函数,设计第二层虚拟控制量。Step 4: Use the BarrierLyapunov function to design the second layer of virtual control quantities.
考虑consider

其中,ωzc为待求的第二层虚拟控制量。Among them, ωzc is the virtual control quantity of the second layer to be obtained.
构造第二层虚拟控制量为:The construction of the second-level virtual control quantity is:

其中,k2>0为设计参数;并定义z3=ωz-ωzc,则有:Among them, k2 >0 is a design parameter; and z3 =ωz -ωzc is defined, there are:

定义

第五步:设计实际舵偏角指令。Step 5: Design the actual rudder declination command.
考虑consider

构造舵偏角控制指令为:The rudder deflection angle control command is constructed as:

其中,k3>0为设计参数,则有:Among them, k3 >0 is the design parameter, then:

定义Lyapunov函数为

由上式可知,若初值z2(0)<kb,则有z2<kb且zi,i=1,2,3渐近收敛到零。因而有:
第六步:综合前述第三至第五步,便得到考虑全捷联导引头视场约束的制导控制一体化算法。最终的制导控制一体化算法如下所示:Step 6: Combining the above-mentioned third to fifth steps, an integrated guidance and control algorithm considering the constraints of the full strapdown seeker field of view is obtained. The final guidance and control integration algorithm is as follows:

其中,设计参数的取值范围为:ke>0,ε>0,
第七步:检验制导控制一体化算法的性能。Step 7: Check the performance of the guidance and control integration algorithm.
为了检验所设计的考虑全捷联导引头视场约束的制导控制一体化算法的性能,需将其应用于导弹在纵向平面内的非线性制导与控制系统,借助常用的计算机数值计算和仿真软件如Matlab/Simulink等来进行。在允许的范围内选择好设计参数后,进行仿真计算并进行性能检验。如果制导控制一体化算法的性能满足要求,则设计结束;否则,需要调整设计参数,重新进行仿真计算并进行性能检验。In order to test the performance of the guidance and control integration algorithm designed considering the constraints of the full strapdown seeker field of view, it needs to be applied to the nonlinear guidance and control system of the missile in the longitudinal plane. With the help of commonly used computer numerical calculation and simulation Software such as Matlab/Simulink etc. After selecting the design parameters within the allowable range, carry out simulation calculation and perform performance inspection. If the performance of the guidance and control integration algorithm meets the requirements, the design is over; otherwise, the design parameters need to be adjusted, and the simulation calculation and performance inspection should be performed again.
实施例:Example:
这里通过介绍一个具有一定代表性的实施例,来进一步说明本发明技术方案中的相关设计。Here, a representative embodiment is introduced to further illustrate the related designs in the technical solution of the present invention.
将所设计的考虑全捷联导引头视场约束的制导控制一体化算法应用于如下所示的导弹在纵向平面内的非线性制导与控制系统:The designed guidance and control integration algorithm considering the constraints of the full strapdown seeker field of view is applied to the nonlinear guidance and control system of the missile in the longitudinal plane as shown below:

式中,导弹所受阻力X,升力Y和俯仰力矩Mz的计算公式为:

在仿真中,设导弹的结构和气动参数分别为:S=0.42m2,L=0.68m,m=1200Kg,Jz=5600Kg·m2,P=5000N,




弹-目相对距离变化曲线如图3所示,导弹的脱靶量小于1m,导弹能够精确命中目标。在导弹的受控飞行阶段(即弹-目相对距离不小于50m阶段),导弹的速度追踪误差角变化曲线如图4所示,导弹的速度追踪误差角λ逐渐收敛并保持在零附近。导弹的体视线角η变化曲线如图5所示,体视线角满足|η|≤20°,即导引头视场约束得到满足。导弹的俯仰舵偏角变化曲线如图6所示。仿真结果表明了所提的考虑全捷联导引头视场约束的制导控制一体化算法的有效性。The change curve of the relative distance between the missile and the target is shown in Figure 3. The missile misses less than 1m, and the missile can accurately hit the target. In the controlled flight stage of the missile (that is, the relative distance between the missile and the target is not less than 50m), the change curve of the missile's velocity tracking error angle is shown in Figure 4. The missile's velocity tracking error angle λ gradually converges and remains near zero. The change curve of the body line of sight angle η of the missile is shown in Figure 5. The body line of sight angle satisfies |η|≤20°, that is, the seeker field of view constraint is satisfied. The change curve of the pitch rudder deflection angle of the missile is shown in Figure 6. The simulation results show the effectiveness of the proposed integrated guidance and control algorithm considering the full strapdown seeker field of view constraints.
Claims (1)















Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010866153.XACN112013726B (en) | 2020-08-25 | 2020-08-25 | An integrated design method for fully strapdown guidance and control based on a third-order model |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010866153.XACN112013726B (en) | 2020-08-25 | 2020-08-25 | An integrated design method for fully strapdown guidance and control based on a third-order model |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112013726A CN112013726A (en) | 2020-12-01 |
| CN112013726Btrue CN112013726B (en) | 2021-05-18 |
Family
ID=73502258
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010866153.XAExpired - Fee RelatedCN112013726B (en) | 2020-08-25 | 2020-08-25 | An integrated design method for fully strapdown guidance and control based on a third-order model |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112013726B (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114636352B (en)* | 2022-02-22 | 2023-08-04 | 西安航天三沃机电设备有限责任公司 | Strapdown laser guide head angle output calibration method |
| CN115421501B (en)* | 2022-09-14 | 2023-04-25 | 中国科学院声学研究所 | Method and system for finite-time signal estimation of underwater vehicle |
| CN115406312B (en)* | 2022-09-23 | 2023-06-23 | 北京航空航天大学 | An Integrated Method of Missile Guidance and Control Considering Field of View and Steering Gear Delay Constraints |
| CN116483109B (en)* | 2023-06-25 | 2023-09-05 | 西安羚控电子科技有限公司 | Sliding mode control-based integrated aircraft guidance control method and system |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106681348B (en)* | 2017-01-13 | 2019-04-19 | 西北工业大学 | Guidance and control integrated design method considering full strapdown seeker field of view constraints |
| CN108106597B (en)* | 2017-11-30 | 2020-07-07 | 中国人民解放军国防科技大学 | Method for measuring angle of full strapdown laser seeker under condition of target linear field of view |
| CN109254594A (en)* | 2018-09-21 | 2019-01-22 | 北京大翔航空科技有限公司 | A kind of full strapdown terminal guidance method for unmanned plane |
| CN109581892B (en)* | 2019-01-29 | 2021-10-12 | 西北工业大学 | Double-turntable semi-physical simulation system and method for full strapdown missile guidance control system |
| CN110008502B (en)* | 2019-01-29 | 2022-07-15 | 西北工业大学 | An integrated design method for 3D guidance and control considering the full strapdown seeker field of view constraints |
- 2020
- 2020-08-25CNCN202010866153.XApatent/CN112013726B/ennot_activeExpired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN112013726A (en) | 2020-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112013726B (en) | An integrated design method for fully strapdown guidance and control based on a third-order model | |
| CN110008502B (en) | An integrated design method for 3D guidance and control considering the full strapdown seeker field of view constraints | |
| CN106681348B (en) | Guidance and control integrated design method considering full strapdown seeker field of view constraints | |
| CN102706217B (en) | Method for controlling attack angle and attack time of multiple missiles | |
| CN113758380B (en) | Guidance control integration method considering steering engine dynamic performance and attack angle constraint | |
| CN115406312B (en) | An Integrated Method of Missile Guidance and Control Considering Field of View and Steering Gear Delay Constraints | |
| Bao et al. | Integrated guidance and control for hypersonic morphing missile based on variable span auxiliary control | |
| CN114153143B (en) | Design method of non-singular fixed time sliding mode guidance law of missile | |
| CN112486023B (en) | Simulation design method for flight control system of cruise missile flight path and control system | |
| CN106091816B (en) | A kind of half strapdown air-to-air missile method of guidance based on sliding mode variable structure theory | |
| CN116839429B (en) | An integrated method of guidance and control considering seeker field of view angle constraints | |
| CN113359819B (en) | An Optimal Guidance Law with Collision Angle Constraint and Acceleration Limitation | |
| CN103486904B (en) | A kind of plan Velocity Pursuit method of guidance of simple and easy guided munition | |
| CN111176315B (en) | Variant cruise missile control method based on L1 adaptive control | |
| CN111240204B (en) | A cruise missile control method based on model reference sliding mode variable structure control | |
| CN112050693B (en) | Semi-strapdown guidance control integrated design method considering attack angle and view field constraint | |
| Xu et al. | Six‐Degree‐of‐Freedom Digital Simulations for Missile Guidance and Control | |
| He et al. | Coning motion stability of spinning missiles with strapdown seekers | |
| CN118625654A (en) | Integrated method of multi-constraint adaptive guidance and control for hypersonic vehicle in dive phase | |
| CN119902538A (en) | A fast fitting method for nonlinear state of aircraft | |
| CN118533002A (en) | A design method for trajectory-adjustable terminal guidance law with attack angle constraint | |
| Qian et al. | Integrated guidance and control for missiles with three-dimensional impact angle constrained | |
| CN115615261B (en) | Elasticity identification and line-of-sight angular rate extraction fusion method for rockets with large slenderness ratio | |
| CN115685756A (en) | An Optimization Method Based on Improved Gray Wolf's Glide Projectile Controller | |
| CN115421388B (en) | An Online Trajectory Planning Method Based on Convex Optimization with Multiple Attitude Constraints for the Last Stage of Long-range Missile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20210518 | |
| CF01 | Termination of patent right due to non-payment of annual fee |