CN112006778A - A rotary cutting robot for clearing thrombus - Google Patents
A rotary cutting robot for clearing thrombusDownload PDFInfo
- Publication number
- CN112006778A CN112006778ACN202010846152.9ACN202010846152ACN112006778ACN 112006778 ACN112006778 ACN 112006778ACN 202010846152 ACN202010846152 ACN 202010846152ACN 112006778 ACN112006778 ACN 112006778A
- Authority
- CN
- China
- Prior art keywords
- blood
- thrombus
- filter cover
- rotary cutting
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 208000007536ThrombosisDiseases0.000titleclaimsabstractdescription67
- 239000008280bloodSubstances0.000claimsabstractdescription86
- 210000004369bloodAnatomy0.000claimsabstractdescription86
- 238000004140cleaningMethods0.000claimsabstractdescription17
- 230000009286beneficial effectEffects0.000abstractdescription7
- 238000007599dischargingMethods0.000abstractdescription6
- 230000000694effectsEffects0.000abstractdescription6
- 238000001914filtrationMethods0.000description8
- 210000004204blood vesselAnatomy0.000description6
- 238000000034methodMethods0.000description4
- 230000017531blood circulationEffects0.000description3
- 230000002792vascularEffects0.000description3
- 238000009825accumulationMethods0.000description2
- 208000024172Cardiovascular diseaseDiseases0.000description1
- 206010028980NeoplasmDiseases0.000description1
- 238000013475authorizationMethods0.000description1
- 230000000740bleeding effectEffects0.000description1
- 230000006378damageEffects0.000description1
- 230000007812deficiencyEffects0.000description1
- 238000010586diagramMethods0.000description1
- 238000009792diffusion processMethods0.000description1
- 238000012377drug deliveryMethods0.000description1
- 238000009434installationMethods0.000description1
- 230000001050lubricating effectEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000002265preventionEffects0.000description1
- 238000002271resectionMethods0.000description1
- 238000006467substitution reactionMethods0.000description1
Images



Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/22—Implements for squeezing-off ulcers or the like on inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; for invasive removal or destruction of calculus using mechanical vibrations; for removing obstructions in blood vessels, not otherwise provided for
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/22—Implements for squeezing-off ulcers or the like on inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; for invasive removal or destruction of calculus using mechanical vibrations; for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22079—Implements for squeezing-off ulcers or the like on inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; for invasive removal or destruction of calculus using mechanical vibrations; for removing obstructions in blood vessels, not otherwise provided for with suction of debris
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B2017/320716—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions comprising means for preventing embolism by dislodged material
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B2017/320741—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions for stripping the intima or the internal plaque from a blood vessel, e.g. for endarterectomy
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
- A61B2017/320775—Morcellators, impeller or propeller like means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/303—Surgical robots specifically adapted for manipulations within body lumens, e.g. within lumen of gut, spine, or blood vessels
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Robotics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Surgical Instruments (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及一种血管机器人,具体涉及一种用于清理血栓的旋切机器人。The invention relates to a vascular robot, in particular to a rotary cutting robot for cleaning thrombus.
背景技术Background technique
血管机器人是一种可以进入血管并能够在血管内自由移动的微型机器人,它可以在血管里完成清除血栓、肿瘤切除、投放药物等工作,对防治心血管疾病具有重要的意义。A vascular robot is a micro-robot that can enter the blood vessel and move freely in the blood vessel. It can complete the removal of thrombus, tumor resection, and drug delivery in the blood vessel, which is of great significance for the prevention and treatment of cardiovascular diseases.
授权公告号为CN102151162B的发明专利公开了“一种清理血栓的磁控血管机器人”,其通过吸嘴和喷嘴的方式实现血栓的吸取和血液的喷出,存在以下问题:The invention patent with the authorization announcement number CN102151162B discloses "a magnetically controlled vascular robot for cleaning thrombus", which realizes the suction of thrombus and the ejection of blood by means of suction nozzles and nozzles, and has the following problems:
1、采用吸嘴对血栓进行吸取,对血栓的破坏清除效果不佳,容易导致血栓堵塞机器人中的管道或在血栓收集器中堵塞过滤网。1. The suction nozzle is used to absorb the thrombus, and the destruction and removal of the thrombus is not effective, which may easily cause the thrombus to block the pipeline in the robot or block the filter in the thrombus collector.
2、过滤后的血液从喷嘴喷出,难以形成对微型机器人产生前进辅助动力,导致需要增加外部驱动力才能让微型机器人在粘度较大的血液血管中顺利前行。2. The filtered blood is ejected from the nozzle, and it is difficult to form a forward auxiliary power for the micro-robot, which leads to the need to increase the external driving force to make the micro-robot move smoothly in the blood vessels with high viscosity.
发明内容SUMMARY OF THE INVENTION
本发明目的在于克服现有技术的不足,提供一种用于清理血栓的旋切机器人,该机器人能有效破坏清理血栓,并且能够稳定地前行移动,有利于提高血栓清除效果。The purpose of the present invention is to overcome the deficiencies of the prior art and provide a rotary cutting robot for cleaning thrombus, which can effectively destroy and clean the thrombus, and can move forward stably, which is beneficial to improve the thrombus removal effect.
本发明的目的通过以下技术方案实现:The object of the present invention is achieved through the following technical solutions:
一种用于清理血栓的旋切机器人,包括微型机器人和外部磁驱动器;其特征在于,所述微型机器人包括呈胶囊状的外壳、设置在外壳内的碎栓收集器、旋切进血件以及尾部排血组件,所述外壳内部嵌有永磁铁;其中,所述旋切进血件固定连接在外壳的前端,所述旋切进血件的前端面上设有多个旋切刀,且旋切进血件上设有连通碎栓收集器进口的进血槽,所述旋切进血件上还设有朝向前方的微型摄像头;所述尾部排血组件包括叶轮、导叶以及驱动叶轮旋转的排血驱动机构,所述导叶固定设置在外壳内;沿着血液的流动方向,所述叶轮设置在导叶的前方,且位于所述碎栓收集器的后方,叶轮与碎栓收集器的出口对应设置;所述外壳的尾部设有排血口。A rotary cutting robot for clearing thrombus, comprising a micro-robot and an external magnetic drive; characterized in that, the micro-robot comprises a capsule-shaped casing, a thrombus collector arranged in the casing, a rotary cutting blood feeding piece, and a In the tail blood drainage assembly, a permanent magnet is embedded in the outer casing; wherein, the rotary cutting blood feeding piece is fixedly connected to the front end of the casing, and a plurality of rotary cutting knives are arranged on the front end surface of the rotary cutting blood feeding piece, and The rotary cutting blood feeding piece is provided with a blood feeding groove that communicates with the inlet of the thrombus collector, and the rotary cutting blood feeding piece is also provided with a miniature camera facing forward; the tail blood drainage assembly includes an impeller, a guide vane and a driving impeller Rotating blood ejection drive mechanism, the guide vane is fixedly arranged in the housing; along the flow direction of blood, the impeller is arranged in front of the guide vane and behind the broken thrombus collector, and the impeller and broken thrombus collect The outlet of the device is correspondingly arranged; the tail of the casing is provided with a blood outlet.
上述用于清理血栓的旋切机器人的工作原理是:The working principle of the above-mentioned atherectomy robot for removing thrombus is:
首先,在外部磁驱动器的作用下,控制微型机器人旋转并按设定方向前进;同时,所述排血驱动机构驱动叶轮旋转,且叶轮的旋转方向与外微型机器人外壳的旋转方向相反;当微型机器人移动至血栓位置处时,位于外壳前端的旋切进血件上的旋切刀对血栓进行旋切,从而将血栓切碎破坏;旋切下来的碎栓通过旋切进血件上的进血槽进入到碎栓收集器中,经过碎栓收集器的过滤后的血液流动至叶轮上,并在叶轮的带动下向叶轮外围呈放射状往后射出,流经导叶,导叶使流入的血液转向至中心流出,血液同时获得动能和压力能,最终经过外壳尾部的排血口排出。在旋切清除血栓过程中,通过旋切刀先对血栓进行切碎破坏,以便进入碎栓收集器中进行过滤,避免堵塞,同时在排血过程中,在叶轮和导叶的作用下,增加了对整个微型机器人的推动力,便于微型机器人在血液中前进以及吸收碎栓。First, under the action of the external magnetic driver, the micro-robot is controlled to rotate and advance in the set direction; at the same time, the blood-discharging drive mechanism drives the impeller to rotate, and the rotation direction of the impeller is opposite to that of the outer micro-robot shell; when the micro-robot rotates in the opposite direction; When the robot moves to the position of the thrombus, the rotary cutter on the rotary cutting blood piece at the front end of the casing performs rotary cutting on the thrombus, thereby shredding and destroying the thrombus; The blood tank enters the thrombus collector, and the blood filtered by the thrombus collector flows to the impeller, and is ejected radially to the periphery of the impeller under the drive of the impeller, and flows through the guide vane, which makes the inflowing blood flow backward. The blood turns to the center to flow out, and the blood gains kinetic energy and pressure energy at the same time, and finally discharges through the blood outlet at the tail of the shell. In the process of removing the thrombus by rotary cutting, the thrombus is first chopped and destroyed by the rotary cutter, so that it can be filtered into the thrombus collector to avoid clogging. Therefore, the driving force for the entire micro-robot is facilitated to move forward in the blood and absorb the debris.
本发明的一个优选方案,所述外壳表面设有多条等距设置的螺旋螺纹,所述多条螺旋螺纹在外壳表面形成多条螺旋槽。In a preferred solution of the present invention, the surface of the casing is provided with a plurality of helical threads arranged at equal intervals, and the plurality of helical threads form a plurality of helical grooves on the surface of the casing.
本发明的一个优选方案,所述碎栓收集器包括呈锥形设置的锥形过滤罩,该锥形过滤罩从前往后逐渐收缩设置,且锥形过滤罩的前端开口与所述进血槽连通设置。In a preferred solution of the present invention, the debris collector includes a conical filter cover arranged in a conical shape, the conical filter cover is gradually contracted from front to back, and the front opening of the conical filter cover is connected to the blood inlet groove. Connectivity settings.
优选地,所述碎栓收集器还包括柱形过滤罩,该柱形过滤罩的前端设有连接开口,所述连接开口连接在所述锥形过滤罩上,所述锥形过滤罩的后端延伸至柱形过滤罩内。Preferably, the debris collector further includes a cylindrical filter cover, the front end of the cylindrical filter cover is provided with a connection opening, the connection opening is connected to the conical filter cover, and the rear of the conical filter cover The ends extend into the cylindrical filter housing.
优选地,所述锥形过滤罩的后端设有延伸过滤罩,该延伸过滤罩呈圆柱形设置,且该延伸过滤罩的后端开口设置。Preferably, the rear end of the conical filter cover is provided with an extension filter cover, the extension filter cover is arranged in a cylindrical shape, and the rear end of the extension filter cover is provided with an opening.
优选地,所述柱形过滤罩的后端呈锥形设置,且从前往后逐渐扩大设置。Preferably, the rear end of the cylindrical filter cover is arranged in a conical shape, and is gradually enlarged from front to back.
本发明的一个优选方案,所述旋切进血件上的旋切刀有两组;其中一组为外部旋切刀,该外部旋切刀呈圆形等距排列设置;另一组为内部旋切刀,该内部旋切刀以旋转排列的方式设置,且位于外部旋切刀内;所述进血槽设有多个,且多个进血槽以旋转排列的方式设置在外部旋切刀和内部旋切刀之间。In a preferred solution of the present invention, there are two sets of rotary cutters on the rotary cutting blood feeding piece; one set is an external rotary cutter, and the external rotary cutters are arranged in a circular and equidistant arrangement; the other set is an internal rotary cutter a rotary cutter, the inner rotary cutter is arranged in a rotary arrangement and is located in the outer rotary cutter; the blood inlet groove is provided with a plurality of, and the plurality of blood inlet grooves are arranged in a rotary arrangement in the outer rotary cutter between the knife and the internal rotary cutter.
本发明的一个优选方案,所述排血驱动机构包括转轴以及驱动转轴转动的转动动力机构,所述转轴转动设置在外壳的轴线处,所述叶轮设置在转轴上;所述柱形过滤罩内部设有轴向延伸的中心过滤罩,所述转轴穿设在所述中心过滤罩中。所述中心过滤罩穿设在延伸过滤罩内。In a preferred solution of the present invention, the blood-draining drive mechanism includes a rotating shaft and a rotational power mechanism for driving the rotating shaft to rotate, the rotating shaft is rotatably arranged at the axis of the casing, and the impeller is arranged on the rotating shaft; the interior of the cylindrical filter cover An axially extending central filter cover is provided, and the rotating shaft is passed through the center filter cover. The central filter cover is passed through the extended filter cover.
本发明的一个优选方案,所述外壳的尾部外凸设置,所述排血口设有多个,该多个排血口呈圆形栅格分布设置在外壳的尾部上。In a preferred solution of the present invention, the tail of the casing is arranged to be convex, and the blood drainage ports are provided with a plurality of blood drainage ports, and the plurality of blood drainage ports are distributed on the tail of the casing in the form of a circular grid.
本发明的一个优选方案,所述外部磁驱动器包括三轴亥姆霍兹线圈以及底座,所述微型机器人设置在所述三轴亥姆霍兹线圈中。In a preferred solution of the present invention, the external magnetic driver includes a three-axis Helmholtz coil and a base, and the micro-robot is arranged in the three-axis Helmholtz coil.
本发明与现有技术相比具有以下有益效果:Compared with the prior art, the present invention has the following beneficial effects:
1、本发明通过旋切刀先对血栓进行切碎破坏,以便碎栓进入碎栓收集器中进行过滤,避免堵塞,并且有利于提高对血栓的清除效果。1. In the present invention, the thrombus is firstly chopped and destroyed by the rotary cutter, so that the broken thrombus enters the broken thrombus collector for filtration, avoids clogging, and is beneficial to improve the removal effect of the thrombus.
2、在排血过程中,通过叶轮和导叶对过滤后的血液进行主动排出,便于将血液排走,同时增加了对整个微型机器人的推动力,以便微型机器人在血液中前进以及吸收碎栓。2. During the bleeding process, the filtered blood is actively discharged through the impeller and the guide vane, which is convenient for the blood to be discharged, and at the same time increases the driving force for the whole micro-robot, so that the micro-robot can move forward in the blood and absorb the broken thrombus. .
附图说明Description of drawings
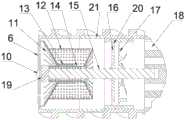
图1-图4为本发明的用于清理血栓的旋切机器人的其中一种具体实施方式的结构示意图,其中,图1为立体图,图2为微型机器人的立体图,图3为微型机器人的剖视图,图4为微型机器人的爆炸视图。1 to 4 are schematic structural diagrams of one specific embodiment of the rotational cutting robot for thrombus cleaning according to the present invention, wherein, FIG. 1 is a perspective view, FIG. 2 is a perspective view of a micro-robot, and FIG. 3 is a cross-sectional view of the micro-robot , Figure 4 is an exploded view of the microrobot.
具体实施方式Detailed ways
下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。The present invention will be further described below with reference to the embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
参见图1-图4,本实施例的用于清理血栓的旋切机器人,包括微型机器人3和外部磁驱动器,所述外部磁驱动器包括三轴亥姆霍兹线圈1以及底座2,所述微型机器人3设置在所述三轴亥姆霍兹线圈1中;所述微型机器人3包括呈胶囊状的外壳4、设置在外壳4内的碎栓收集器、旋切进血件6以及尾部排血组件,所述外壳4内部嵌有永磁铁21;其中,所述旋切进血件6固定连接在外壳4的前端,所述旋切进血件6的前端面上设有多个旋切刀,且旋切进血件6上设有连通碎栓收集器进口的进血槽9,所述旋切进血件6上还设有朝向前方的微型摄像头10;所述尾部排血组件包括叶轮16、导叶17以及驱动叶轮16旋转的排血驱动机构,所述导叶17固定设置在外壳4内;沿着血液的流动方向,所述叶轮16设置在导叶17的前方,且位于所述碎栓收集器的后方,叶轮16与碎栓收集器的出口对应设置;所述外壳4的尾部设有排血口18。Referring to FIGS. 1 to 4 , the rotational cutting robot for thrombus cleaning in this embodiment includes a
参见图2-图4,所述外壳4表面设有多条等距设置的螺旋螺纹5,所述多条螺旋螺纹5在外壳4表面形成多条螺旋槽。这样,在外壳4旋转过程中能产生动压润滑膜,实现在血管中悬空运行;同时,在螺旋槽的作用下,便于在血液中产生轴向推力,有利于机器人的悬浮式快速运行。Referring to FIGS. 2-4 , the surface of the
参见图3和图4,所述碎栓收集器包括呈锥形设置的锥形过滤罩11,该锥形过滤罩11从前往后逐渐收缩设置,且锥形过滤罩11的前端开口与所述进血槽9连通设置。设置锥形过滤罩11,便于碎栓集中过滤,有利于血液从各个方向排出,从而加快过滤速度,避免堵塞。Referring to FIG. 3 and FIG. 4 , the broken plug collector includes a
参见图3和图4,所述碎栓收集器还包括柱形过滤罩12,该柱形过滤罩12的前端设有连接开口,所述连接开口连接在所述锥形过滤罩11上,所述锥形过滤罩11的后端延伸至柱形过滤罩12内。位于锥形过滤罩11中的碎栓,在血液的冲击下容易冲出锥形过滤罩11,此时通过柱形过滤罩12的设置,对冲出的碎栓进行二次过滤和收集,避免重新进入血管,有利于碎栓的收集,增加储存空间。Referring to FIG. 3 and FIG. 4 , the broken plug collector further includes a
参见图3和图4,所述锥形过滤罩11的后端设有延伸过滤罩13,该延伸过滤罩13呈圆柱形设置,且该延伸过滤罩13的后端开口设置。通过延伸过滤罩13的设置,使得碎栓进入到锥形过滤罩11后,延伸锥形过滤罩11的内壁导向移动到延伸过滤罩13中,并通过延伸过滤罩13进入到柱形过滤罩12中,让碎栓能够进入到柱形过滤罩12的内部中心,延长碎栓移动距离,让血液能够充分通过锥形过滤罩11上的通孔流出;同时,也能够避免碎栓堆积在锥形过滤罩11的后端部,保持血液的流动性,提高过滤效果。Referring to FIG. 3 and FIG. 4 , the rear end of the
参见图3和图4,所述柱形过滤罩12的后端呈锥形设置,且从前往后逐渐扩大设置。通过设置这样的柱形过滤罩12,有效避免碎栓堆积在柱形过滤罩12的后端上,从而避免堵塞;另外,碎栓移动到柱形过滤罩12的后端时,沿着锥形设置的后端部,逐渐向各个方向散开移动,从而有利于提高过滤效果。Referring to FIG. 3 and FIG. 4 , the rear end of the
参见图2和图3,所述旋切进血件6上的旋切刀有两组;其中一组为外部旋切刀7,该外部旋切刀7呈圆形等距排列设置;另一组为内部旋切刀8,该内部旋切刀8以旋转排列的方式设置,且位于外部旋切刀7内;所述进血槽9设有多个,且多个进血槽9以旋转排列的方式设置在外部旋切刀7和内部旋切刀8之间。通过设置这样的旋切刀,便于在接触血栓后充分地将血栓切碎破坏,同时让碎栓从设置在旋切刀之间的进血槽9进入碎栓收集器中进行过滤。2 and 3, there are two sets of rotary cutters on the rotary cutting
参见图3和图4,所述排血驱动机构包括转轴15以及驱动转轴15转动的转动动力机构,所述转轴15转动设置在外壳4的轴线处,所述叶轮16设置在转轴15上;所述转轴15的后端向后延伸穿过导叶17且连接在外壳4尾部;所述柱形过滤罩12内部设有轴向延伸的中心过滤罩14,所述转轴15穿设在所述中心过滤罩14中。所述中心过滤罩14穿设在延伸过滤罩13内。通过转轴15便于叶轮16和导叶17的安装,实现对叶轮16的旋转驱动。转轴15穿设在中心过滤罩14中,能在转轴15转动时让中心过滤罩14以及柱形过滤罩12中的碎栓也保持一定的动态,避免堆积堵塞,且有利于提高过滤效果。本实施例中,所述转动动力机构为电机19,该电机19和微型机器人3的控制模块设置在转轴15的前端上。本实施例中,所述叶轮16的叶片与导叶17外壳内壁靠近设置,所述叶轮16的轮盘与导叶17外壳内壁之间设有通血槽20。本实施例中,所述导叶17与外壳4内壁固定连接,且导叶17与外壳4之间同样设有通血槽22,所述导叶17能利于血流扩散通过,增加微型机器人3推进力。Referring to FIGS. 3 and 4 , the blood drainage drive mechanism includes a rotating
参见图3和图4,所述外壳4的尾部外凸设置,所述排血口18设有多个,该多个排血口18呈圆形栅格分布设置在外壳4的尾部上。Referring to FIGS. 3 and 4 , the tail portion of the
参见图1-图4,本实施例的用于清理血栓的旋切机器人的工作原理是:Referring to FIG. 1 to FIG. 4 , the working principle of the atherectomy robot for thrombus cleaning in this embodiment is as follows:
首先,在外部磁驱动器的作用下,控制微型机器人3旋转并按设定方向前进;同时,所述排血驱动机构驱动叶轮16旋转,且叶轮16的旋转方向与外微型机器人3外壳4的旋转方向相反;当微型机器人3移动至血栓位置处时,位于外壳4前端的旋切进血件6上的旋切刀对血栓进行旋切,从而将血栓切碎破坏;旋切下来的碎栓通过旋切进血件6上的进血槽9进入到碎栓收集器中,经过碎栓收集器的过滤后的血液流动至叶轮16上,并在叶轮16的带动下向叶轮16外围呈放射状往后射出,流经导叶17,导叶17使流入的血液转向至中心流出,血液同时获得动能和压力能,最终经过外壳4尾部的排血口18排出。在旋切清除血栓过程中,通过旋切刀先对血栓进行切碎破坏,以便进入碎栓收集器中进行过滤,避免堵塞,同时在排血过程中,在叶轮16和导叶17的作用下,增加了对整个微型机器人3的推动力,便于微型机器人3在血液中前进以及吸收碎栓。First, under the action of the external magnetic driver, the
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。The above is the preferred embodiment of the present invention, but the embodiment of the present invention is not limited by the above-mentioned content, and any other changes, modifications, substitutions, combinations, and simplifications made without departing from the spirit and principle of the present invention, All should be equivalent replacement modes, and all are included in the protection scope of the present invention.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010846152.9ACN112006778A (en) | 2020-08-20 | 2020-08-20 | A rotary cutting robot for clearing thrombus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010846152.9ACN112006778A (en) | 2020-08-20 | 2020-08-20 | A rotary cutting robot for clearing thrombus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112006778Atrue CN112006778A (en) | 2020-12-01 |
Family
ID=73505326
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010846152.9APendingCN112006778A (en) | 2020-08-20 | 2020-08-20 | A rotary cutting robot for clearing thrombus |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112006778A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113855158A (en)* | 2021-09-14 | 2021-12-31 | 广东工业大学 | Vascular intervention robot controlled by external magnetic field |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101961261A (en)* | 2010-09-30 | 2011-02-02 | 广州大学 | Jet flow-driven blood vessel robot |
| KR101307581B1 (en)* | 2012-09-07 | 2013-09-12 | 이경진 | Strainer assembly for drain |
| KR101315893B1 (en)* | 2010-04-20 | 2013-10-08 | 서울대학교산학협력단 | Mobile robot for eliminating impurities inside the hollow shaft |
| CN104244797A (en)* | 2012-05-07 | 2014-12-24 | 奥林巴斯医疗株式会社 | Magnetic field generation device, and capsule-type medical device guide system |
| CN204255531U (en)* | 2013-07-31 | 2015-04-08 | 是德科技股份有限公司 | Nano calorimeter device |
| CN104822304A (en)* | 2012-11-23 | 2015-08-05 | 全南大学校产学协力团 | Capsule endoscope driving control system and capsule endoscope system including the same |
| CN204582692U (en)* | 2015-04-14 | 2015-08-26 | 广东梅雁吉祥水电股份有限公司 | A kind of water pipeline for hydraulic engineering |
| CN107280728A (en)* | 2017-08-04 | 2017-10-24 | 李莉 | A kind of thrombus remover for preventing blood vessel from damaging |
| CN108114525A (en)* | 2017-12-26 | 2018-06-05 | 铜陵日科电子有限责任公司 | Transformer immersion oil filter device |
| CN111011316A (en)* | 2019-11-25 | 2020-04-17 | 浙江海洋大学 | An Antarctic krill continuous fishing device for fishing boats |
- 2020
- 2020-08-20CNCN202010846152.9Apatent/CN112006778A/enactivePending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101315893B1 (en)* | 2010-04-20 | 2013-10-08 | 서울대학교산학협력단 | Mobile robot for eliminating impurities inside the hollow shaft |
| CN101961261A (en)* | 2010-09-30 | 2011-02-02 | 广州大学 | Jet flow-driven blood vessel robot |
| CN104244797A (en)* | 2012-05-07 | 2014-12-24 | 奥林巴斯医疗株式会社 | Magnetic field generation device, and capsule-type medical device guide system |
| KR101307581B1 (en)* | 2012-09-07 | 2013-09-12 | 이경진 | Strainer assembly for drain |
| CN104822304A (en)* | 2012-11-23 | 2015-08-05 | 全南大学校产学协力团 | Capsule endoscope driving control system and capsule endoscope system including the same |
| CN204255531U (en)* | 2013-07-31 | 2015-04-08 | 是德科技股份有限公司 | Nano calorimeter device |
| CN204582692U (en)* | 2015-04-14 | 2015-08-26 | 广东梅雁吉祥水电股份有限公司 | A kind of water pipeline for hydraulic engineering |
| CN107280728A (en)* | 2017-08-04 | 2017-10-24 | 李莉 | A kind of thrombus remover for preventing blood vessel from damaging |
| CN108114525A (en)* | 2017-12-26 | 2018-06-05 | 铜陵日科电子有限责任公司 | Transformer immersion oil filter device |
| CN111011316A (en)* | 2019-11-25 | 2020-04-17 | 浙江海洋大学 | An Antarctic krill continuous fishing device for fishing boats |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113855158A (en)* | 2021-09-14 | 2021-12-31 | 广东工业大学 | Vascular intervention robot controlled by external magnetic field |
| CN113855158B (en)* | 2021-09-14 | 2023-11-28 | 广东工业大学 | Vascular interventional robot controlled by external magnetic field |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101407869B1 (en) | A rotary pump for the sludge | |
| JP5511107B2 (en) | Substance removal device and method with improved substance capture efficiency | |
| US4228962A (en) | Comminuting liquid swirler | |
| CN100406212C (en) | Razor including propeller, shaving head | |
| WO2013182027A1 (en) | Debris aspiration apparatus of thrombus remover | |
| JP5757997B2 (en) | Filter mechanism | |
| CN111658074B (en) | Reciprocating type thrombus and plaque excision device | |
| CN113339270B (en) | Solid-liquid separation type non-clogging pump | |
| CN112006778A (en) | A rotary cutting robot for clearing thrombus | |
| CN113288334B (en) | Cardiovascular intervention operation device | |
| JPH02501761A (en) | Improved pump structure | |
| CN208294831U (en) | A kind of anti-clogging half-opened impeller | |
| CN112943676B (en) | Submersible pump | |
| JPH119903A (en) | Liquid tank capable of deforming and foam suction device for defoaming | |
| CN208364400U (en) | Centrifugal pump with dirt eliminating function | |
| CN113729851B (en) | Thrombus excision device | |
| KR102647805B1 (en) | Disposal apparatus for jellyfish | |
| CN202012482U (en) | Sewage pump with cutting device | |
| JP2016150135A (en) | Suction tube | |
| CN115444506B (en) | Suction catheter | |
| CN221610257U (en) | Water pump impeller with crushing function | |
| CN223379954U (en) | Peeling cutter head and fruit and vegetable peeling device | |
| JP2021053130A (en) | Medical device | |
| CN221824074U (en) | A kind of impurity removal and anti-blocking lifting pump for agricultural irrigation | |
| CN218459691U (en) | High-lift cutting pump |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20201201 |