CN111969488A - Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead area - Google Patents
Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead areaDownload PDFInfo
- Publication number
- CN111969488A CN111969488ACN202010848541.5ACN202010848541ACN111969488ACN 111969488 ACN111969488 ACN 111969488ACN 202010848541 ACN202010848541 ACN 202010848541ACN 111969488 ACN111969488 ACN 111969488A
- Authority
- CN
- China
- Prior art keywords
- obstacle avoidance
- abc
- electric field
- unmanned aerial
- aerial vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007689inspectionMethods0.000titleclaimsabstractdescription40
- 230000009466transformationEffects0.000titleclaimsabstractdescription28
- 238000000034methodMethods0.000titleclaimsabstractdescription21
- 230000005684electric fieldEffects0.000claimsabstractdescription54
- 230000005540biological transmissionEffects0.000claimsabstractdescription47
- 238000000819phase cycleMethods0.000claimsabstractdescription23
- 238000005516engineering processMethods0.000claimsabstractdescription4
- 230000001131transforming effectEffects0.000claimsabstract2
- 239000004020conductorSubstances0.000claimsdescription26
- 238000004458analytical methodMethods0.000claimsdescription9
- 238000004364calculation methodMethods0.000claimsdescription8
- 238000004088simulationMethods0.000claimsdescription2
- 238000010586diagramMethods0.000description3
- 238000001514detection methodMethods0.000description2
- 230000001960triggered effectEffects0.000description2
- 230000009286beneficial effectEffects0.000description1
- 238000003745diagnosisMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
Images





Classifications
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G1/00—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines
- H02G1/02—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines for overhead lines or cables
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R29/00—Arrangements for measuring or indicating electric quantities not covered by groups G01R19/00 - G01R27/00
- G01R29/12—Measuring electrostatic fields or voltage-potential
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electric Cable Installation (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及高压线路巡检领域,具体涉及一种基于坐标变换的高压线路架空区域无人机巡检避障方法。The invention relates to the field of high-voltage line inspection, in particular to a method for patrol inspection and obstacle avoidance by unmanned aerial vehicles in overhead areas of high-voltage lines based on coordinate transformation.
背景技术Background technique
随着我国电网的飞速发展,高压输电线路电压等级越来越高,输电线路越来越长且所经过的地形地貌也变得越来越复杂。无人飞行器具有不受地形环境限制的优势、费效比高的优势,同时无需顾虑飞机意外坠毁导致的机上人员伤亡问题。因此为了提高电网巡检的效率,同时为解决近年来灾害频发对电网安全的现实威胁,利用无人机进行高压电力线路巡检已经成为一种迫切的需求,并且逐步会取代人工巡检,大大提高巡检效率。With the rapid development of my country's power grid, the voltage level of high-voltage transmission lines is getting higher and higher, the transmission lines are getting longer and longer, and the terrain they pass through is becoming more and more complex. Unmanned aerial vehicles have the advantages of being unrestricted by terrain environment and cost-effective, and at the same time, there is no need to worry about the casualties caused by the accidental crash of the aircraft. Therefore, in order to improve the efficiency of power grid inspection, and to solve the real threat to power grid security caused by frequent disasters in recent years, the use of drones for high-voltage power line inspection has become an urgent need, and will gradually replace manual inspections. Greatly improve the inspection efficiency.
为了便于输电线路故障分析诊断,无人机巡检时要求拍摄高清晰度的线路和杆塔的照片,因此应尽可能的缩短无人机和输电线路或杆塔等的距离,同时保障足够的安全性,无人机就必须有一套高灵敏度的避障系统,当无人机和巡线目标之间距离小于安全距离时,及时发出信号,同时送给无人机中控系统,而且要求该安全距离要尽可能小,以便拍摄的照片能更加清晰,方便工作人员的故障诊断。In order to facilitate the analysis and diagnosis of transmission line faults, high-definition photos of lines and towers are required to be taken during UAV inspections. Therefore, the distance between UAVs and transmission lines or towers should be shortened as much as possible, while ensuring sufficient safety. , the UAV must have a set of high-sensitivity obstacle avoidance system. When the distance between the UAV and the line patrol target is less than the safe distance, it will send a signal in time and send it to the UAV central control system, and the safe distance is required. It should be as small as possible so that the photos taken can be clearer and easier for staff to troubleshoot.
发明内容SUMMARY OF THE INVENTION
有鉴于此,本发明的目的在于提供一种基于坐标变换的高压线路架空区域无人机巡检避障方法,避障参量是基于坐标变换后的电场强度平均值,比原有的基于直角坐标系的避障方案更接近实际情况,避障效率和精准性更高。In view of this, the purpose of the present invention is to provide a method of UAV patrol inspection and obstacle avoidance in overhead areas of high-voltage lines based on coordinate transformation. The obstacle avoidance parameter is based on the average value of the electric field intensity after coordinate transformation. The obstacle avoidance scheme of the system is closer to the actual situation, and the obstacle avoidance efficiency and accuracy are higher.
为实现上述目的,本发明采用如下技术方案:To achieve the above object, the present invention adopts the following technical solutions:
一种基于坐标变换的高压线路架空区域无人机巡检避障方法,包括以下步骤:A method for patrol inspection and obstacle avoidance of unmanned aerial vehicles in overhead areas of high-voltage lines based on coordinate transformation, comprising the following steps:
步骤S1:通过坐标变换技术将直角坐标系变换为极坐标系;Step S1: the rectangular coordinate system is transformed into a polar coordinate system by coordinate transformation technology;
步骤S2:根据架设方式、导线排列方式和相序对输电线路进行分类;Step S2: classify the transmission line according to erection mode, wire arrangement mode and phase sequence;
步骤S3:基于变换得到的极坐标系,分别计算不同导线架设方式和排列方式对应的电场强度分布,并作为无人机巡检避障的避障参量。Step S3: Based on the polar coordinate system obtained by transformation, calculate the electric field intensity distribution corresponding to different wire erection modes and arrangement modes respectively, and use them as obstacle avoidance parameters for UAV patrol inspection and obstacle avoidance.
进一步的,所述步骤S2中分类具体为:根据输电线路架设方式分为单回和同塔双回输电线路,其中对于单回线路根据导线排列方式细分为三类;同塔双回按照相序,结合各种相序对空间电场强度的影响,分为三类。Further, the classification in the step S2 is specifically: according to the erection mode of the transmission line, it is divided into single-circuit and the same tower double-circuit transmission line, wherein for the single-circuit line, it is subdivided into three categories according to the wire arrangement; According to the influence of various phase sequences on the space electric field strength, it can be divided into three categories.
进一步的,所述步骤S1具体为:Further, the step S1 is specifically:
步骤S11:基于直角yz坐标系,构建极坐标系,并设极坐标原点为(0,b);Step S11: based on the Cartesian yz coordinate system, construct a polar coordinate system, and set the polar coordinate origin as (0, b);
步骤S12:根据仿真数据,计算最佳极坐标原点坐标取值,得到最终的极坐标系。Step S12: According to the simulation data, calculate the optimal polar coordinate origin coordinate value to obtain the final polar coordinate system.
进一步的,所述最佳极坐标原点坐标取值,输电线路架设方式为单回输电线路时,计算表达式如式(1)Further, when the optimal polar coordinate origin coordinate value is taken, and the transmission line erection method is a single-circuit transmission line, the calculation expression is as formula (1)

式中,h1为三相中架设高度相同的两相导线架设高度,h2为最下端导线架设高度,避雷线架设高度设为h3,
输电线路架设方式为同塔双回输电线路时,极坐标原点坐标参数b的计算公式如式(2):When the transmission line is erected as a double-circuit transmission line on the same tower, the formula for calculating the coordinate parameter b of the polar coordinate origin is as follows:

其中Ha、Hb、Hc、Hd分别为三相导线、避雷线的离地高度。Among them, Ha, Hb, Hc, and Hd are the ground clearances of the three-phase conductors and lightning protection wires, respectively.
进一步的,所述单回架空区域按照导线排列方式分为正三角、倒三角和水平排列三类。Further, the single-circuit overhead area is divided into three types according to the arrangement of the wires, namely, a regular triangle, an inverted triangle and a horizontal arrangement.
进一步的,所述同塔双回输电线路按照相序分为6种即ABC-ABC、ABC-ACB、ABC-BCA、ABC-BAC、ABC-CBA、ABC-CAB六种组合,其中BC-ABC和ABC-BAC两种相序下其电场强度值和变化趋势一致,统一归为一类进行避障分析;ABC-ACB和ABC-CAB、ABC-BCA和ABC-CBA进行归类,得到三类。Further, the double-circuit transmission lines on the same tower are divided into 6 types according to the phase sequence, namely ABC-ABC, ABC-ACB, ABC-BCA, ABC-BAC, ABC-CBA, ABC-CAB six combinations, among which BC-ABC The electric field strength value and change trend are consistent with the two phase sequences of ABC-BAC, and they are unified into one category for obstacle avoidance analysis; ABC-ACB and ABC-CAB, ABC-BCA and ABC-CBA are classified, and three categories are obtained. .
进一步的,当输电线路架设方式为单回输电线路时,所述步骤S3具体为:Further, when the transmission line erection method is a single-circuit transmission line, the step S3 is specifically:
步骤S31:根据式(1)计算得到极坐标原点位置,并进一步计算出该坐标原点与三相导线及避雷线的距离;Step S31: calculate and obtain the polar coordinate origin position according to formula (1), and further calculate the distance between this coordinate origin and the three-phase wire and the lightning conductor;
步骤S32:根据坐标原点与三相导线及避雷线的距离,设置预警避障距离和极限避障距离;Step S32: set early warning obstacle avoidance distance and limit obstacle avoidance distance according to the distance between coordinate origin and three-phase wire and lightning protection line;
步骤S33:根据预警避障距离和极限避障距离,得到无人机巡检的极限避障电场强度值和预警避障电场强度值,并作为无人机巡检避障的避障参量。Step S33: According to the early warning obstacle avoidance distance and the limit obstacle avoidance distance, the limit obstacle avoidance electric field strength value and the early warning obstacle avoidance electric field strength value of the UAV patrol inspection are obtained, and used as the obstacle avoidance parameter of the UAV patrol inspection and obstacle avoidance.
进一步的,当输电线路架设方式为同塔双回输电线路时,所述步骤S3具体为:Further, when the transmission line erection method is a double-circuit transmission line on the same tower, the step S3 is specifically:
步骤S31:根据式(2)计算得到极坐标原点位置,分别计算出所有导线和极坐标原点的距离;Step S31: calculate and obtain the polar coordinate origin position according to formula (2), calculate the distance of all wires and polar coordinate origin respectively;
步骤S32:根据所有导线和极坐标原点的距离,设置预警避障距离和极限避障距离;Step S32: set early warning obstacle avoidance distance and limit obstacle avoidance distance according to the distance of all wires and polar coordinate origin;
步骤S33:根据预警避障距离和极限避障距离,得到无人机巡检的极限避障电场强度值和预警避障电场强度值,并作为无人机巡检避障的避障参量。Step S33: According to the early warning obstacle avoidance distance and the limit obstacle avoidance distance, the limit obstacle avoidance electric field strength value and the early warning obstacle avoidance electric field strength value of the UAV patrol inspection are obtained, and used as the obstacle avoidance parameter of the UAV patrol inspection and obstacle avoidance.
本发明与现有技术相比具有以下有益效果:Compared with the prior art, the present invention has the following beneficial effects:
1、本发明根据架设方式、导线排列方式和相序对输电线路进行分类,分别研究其避障策略,从而简化无人机巡检避障策略。1. The present invention classifies the transmission lines according to the erection method, the wire arrangement method and the phase sequence, and studies its obstacle avoidance strategy respectively, thereby simplifying the UAV inspection and obstacle avoidance strategy.
2、本发明采用的避障参量是基于坐标变换后的电场强度平均值,比原有的基于直角坐标系的避障方案更接近实际情况,避障效率和精准性更高。2. The obstacle avoidance parameter adopted in the present invention is based on the average value of the electric field intensity after coordinate transformation, which is closer to the actual situation than the original obstacle avoidance scheme based on the rectangular coordinate system, and has higher obstacle avoidance efficiency and accuracy.
3、本发明基于坐标变换的电场强度平均值的无人机避障系统是根据输电线路周围电场环境特殊性设计,且所用元器件体积小、简单轻便,既能够克服超声波测距、红外测距和激光测距设备检测正确率低的问题,又能够克服微波雷达测距设备体积、重量过大,不便于无人机搭载的弊端。3. The UAV obstacle avoidance system based on the average value of the electric field intensity of the coordinate transformation of the present invention is designed according to the particularity of the electric field environment around the transmission line, and the components used are small, simple and lightweight, which can overcome ultrasonic ranging and infrared ranging. It can also overcome the problem of low detection accuracy with laser ranging equipment, and can overcome the shortcomings of microwave radar ranging equipment that is too large in size and weight, which is inconvenient for drones to carry.
附图说明Description of drawings
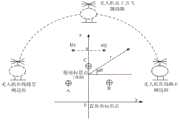
图1是本发明一实施例中坐标变换示意图;1 is a schematic diagram of coordinate transformation in an embodiment of the present invention;
图2是本发明一实施例中同塔双回极线路的坐标系示意图2 is a schematic diagram of a coordinate system of a double-circuit pole line on the same tower according to an embodiment of the present invention
图3是本发明一实施例中观测点电场强度随极坐标角变化趋势图;3 is a trend diagram of the variation trend of the electric field intensity at the observation point with the polar coordinate angle in an embodiment of the present invention;
图4是本发明一实施例中观测点和极坐标原点的距离随极坐标角的变化曲线;Fig. 4 is the variation curve of the distance of the observation point and the polar coordinate origin with the polar coordinate angle in an embodiment of the present invention;
图5是本发明一实施例中电场强度随极坐标角变化趋势Fig. 5 is the variation trend of electric field intensity with polar coordinate angle in an embodiment of the present invention
图6是本发明一实施例中观测点和极坐标原点的距离随极坐标角的变化曲线。FIG. 6 is a graph showing the variation of the distance between the observation point and the polar coordinate origin with the polar coordinate angle in an embodiment of the present invention.
具体实施方式Detailed ways
下面结合附图及实施例对本发明做进一步说明。The present invention will be further described below with reference to the accompanying drawings and embodiments.
本发明提供一种基于坐标变换的高压线路架空区域无人机巡检避障方法,包括以下步骤:The present invention provides a method for patrol inspection and obstacle avoidance of unmanned aerial vehicles in overhead areas of high-voltage lines based on coordinate transformation, comprising the following steps:
步骤S1:通过坐标变换技术将直角坐标系变换为极坐标系;Step S1: the rectangular coordinate system is transformed into a polar coordinate system by coordinate transformation technology;
步骤S2:根据架设方式、导线排列方式和相序对输电线路进行分类;Step S2: classify the transmission line according to erection mode, wire arrangement mode and phase sequence;
步骤S3:基于变换得到的极坐标系,分别计算不同导线架设方式和排列方式对应的电场强度分布,并作为无人机巡检避障的避障参量。Step S3: Based on the polar coordinate system obtained by transformation, calculate the electric field intensity distribution corresponding to different wire erection modes and arrangement modes respectively, and use them as obstacle avoidance parameters for UAV patrol inspection and obstacle avoidance.
参考图1,本实施例中在原来的直角坐标系即yz坐标系(横向为y轴,与地面垂直方向为z轴)中建立极坐标系,由于输电线路空间关于z轴左右对称排列,故极坐标原点必须在z轴上,可设极坐标原点为(0,b)。由于无人机飞行巡检是以输电线路几何中心为中心的等距离避障巡检,故在进行坐标变化时,极坐标原点必须在直角坐标原点即图1中的O点和避雷线连线与z轴交点即图1中的D点之间即图1中的O点和D点之间。Referring to Figure 1, in this embodiment, a polar coordinate system is established in the original Cartesian coordinate system, that is, the yz coordinate system (y-axis in the lateral direction, and z-axis in the vertical direction to the ground). Since the transmission line space is arranged symmetrically about the z-axis, so The origin of polar coordinates must be on the z-axis, and the origin of polar coordinates can be set to (0, b). Since the UAV flight inspection is an equidistant obstacle avoidance inspection centered on the geometric center of the transmission line, when the coordinates are changed, the origin of the polar coordinates must be the origin of the rectangular coordinates, that is, the O point in Figure 1 and the lightning protection line. The intersection with the z-axis is between point D in FIG. 1 , that is, between point O and point D in FIG. 1 .
参考图2,本实施例中,所述最佳极坐标原点坐标取值,输电线路架设方式为单回输电线路时,计算表达式如式(1)Referring to FIG. 2 , in this embodiment, the optimal polar coordinate origin coordinate is taken as the value, and when the transmission line erection method is a single-circuit transmission line, the calculation expression is as shown in Equation (1)

式中,h1为三相中架设高度相同的两相导线架设高度,h2为最下端导线架设高度,避雷线架设高度设为h3,
输电线路架设方式为同塔双回输电线路时,极坐标原点坐标参数b的计算公式如式(2):When the transmission line is erected as a double-circuit transmission line on the same tower, the formula for calculating the coordinate parameter b of the polar coordinate origin is as follows:

其中Ha、Hb、Hc、Hd分别为三相导线、避雷线的离地高度。Among them, Ha, Hb, Hc, and Hd are the ground clearances of the three-phase conductors and lightning protection wires, respectively.
在本实施例中,所述步骤S2中分类具体为:根据输电线路架设方式分为单回和同塔双回输电线路,其中所述单回架空区域按照导线排列方式分为正三角、倒三角和水平排列三类;所述同塔双回输电线路按照相序分为6种即ABC-ABC、ABC-ACB、ABC-BCA、ABC-BAC、ABC-CBA、ABC-CAB六种组合,其中BC-ABC和ABC-BAC两种相序下其电场强度值和变化趋势一致,统一归为一类进行避障分析;ABC-ACB和ABC-CAB、ABC-BCA和ABC-CBA进行归类,得到三类。In the present embodiment, the classification in the step S2 is specifically: according to the erection mode of the transmission line, it is divided into single-circuit and the same tower double-circuit transmission line, wherein the single-circuit overhead area is divided into a regular triangle and an inverted triangle according to the wire arrangement. and horizontally arranged in three categories; the double-circuit transmission lines on the same tower are divided into 6 types according to the phase sequence, namely ABC-ABC, ABC-ACB, ABC-BCA, ABC-BAC, ABC-CBA, ABC-CAB six combinations, of which Under the two phase sequences BC-ABC and ABC-BAC, the electric field strength value and change trend are consistent, and they are unified into one category for obstacle avoidance analysis; ABC-ACB and ABC-CAB, ABC-BCA and ABC-CBA are classified, Get three categories.
本实施例中,单回线路以500kV超高压输电线路在三种典型的排列方式(正三角排列、倒三角排列和水平排列)下为例,In this embodiment, the single-circuit line takes the 500kV ultra-high voltage transmission line as an example under three typical arrangements (orthogonal, inverted and horizontal).
表1 500kV超高压同塔单回线路主要参数Table 1 Main parameters of 500kV ultra-high voltage single-circuit line on the same tower

在本实施例中,分别预警避障和极限避障,预警避障为当无人机和最近的输电线路距离在30米以内时触发;极限避障为当无人机和最近的输电线路距离在20米以内时触发;In this embodiment, early warning obstacle avoidance and extreme obstacle avoidance are respectively, the early warning obstacle avoidance is triggered when the distance between the drone and the nearest transmission line is within 30 meters; the extreme obstacle avoidance is when the distance between the drone and the nearest transmission line is Triggered when within 20 meters;
1)正三角排列1) Regular triangle arrangement
对于正三角排列方式,在进行极坐标系坐标变换时,得到极坐标原点位置为(0,28.5m),计算出该坐标原点与三相导线及避雷线的距离,计算结果显示,极坐标原点和避雷线的距离最大为24m,故预警避障时在极坐标体系中,


参考图3,在半径为44m和54m的上半圆周,电场强度随极坐标角的变化区间很小,故可以用电场强度平均值取代该区间的电场强度变化。通过计算得电场强度平均值为:当r=44m时,Eave=2.84kV;当r=54m时,Eave=1.70kV即在本排列方式下,无人机巡检的极限避障电场强度值为2.84kV,预警避障电场强度值为1.70kV。下面维持电场强度值不变,得到对应预警避障和极限避障电场强度限值,观测点和极坐标原点的距离r随
参考图4,在极坐标角
2)倒三角排列2) Inverted triangle arrangement
类似正三角排列计算原理可得倒三角排列方式下最佳极坐标原点为(0,36m),对应该极坐标点,在r取值分别38m和48m分别对应极限避障和预警避障(由于极坐标原点和边相导线最大距离为18m,按照极限避障和预警避障时无人机和边相导线距离为20和30m得到),类似可得到对于500kV倒三角排列方式下无人机巡检避障的极限避障限值为3.17kV/m,预警避障限值为1.88kV/m。Similar to the calculation principle of the equilateral triangle arrangement, it can be obtained that the optimal polar coordinate origin in the inverted triangle arrangement is (0,36m), corresponding to the polar coordinate point, and the values of r are 38m and 48m, respectively, corresponding to extreme obstacle avoidance and early warning obstacle avoidance (due to The maximum distance between the polar coordinate origin and the side-phase conductors is 18m, which is obtained according to the distance between the UAV and the side-phase conductors when the limit obstacle avoidance and early warning obstacle avoidance are 20 and 30m). The limit obstacle avoidance limit of detection and avoidance is 3.17kV/m, and the early warning obstacle avoidance limit is 1.88kV/m.
3)水平排列3) Arrange horizontally
类似正三角排列计算原理可得水平排列方式下最佳极坐标原点为(0,26m),对应该极坐标点,在r取值分别35m和45m分别对应极限避障和预警避障(由于极坐标原点和边相导线最大距离为15m,按照极限避障和预警避障时无人机和边相导线距离为20和30m得到),类似可得到对于500kV水平排列方式下无人机巡检避障的极限避障限值为4.63 kV/m,预警避障限值为2.52kV/m。Similar to the calculation principle of the equilateral triangle arrangement, it can be obtained that the optimal polar coordinate origin in the horizontal arrangement is (0,26m), corresponding to the polar coordinate point, and the values of r are 35m and 45m respectively corresponding to extreme obstacle avoidance and early warning obstacle avoidance (due to the polar The maximum distance between the coordinate origin and the side-phase conductors is 15m, which is obtained according to the distance between the UAV and the side-phase conductors when the limit obstacle avoidance and early warning obstacle avoidance are 20 and 30m). The ultimate obstacle avoidance limit is 4.63 kV/m, and the early warning obstacle avoidance limit is 2.52 kV/m.
在本实施例中,以500kV同塔双回超高压输电线路在六种不同的相序下,研究其无人机巡检避障策略。线路参数如表2所示。In this embodiment, the UAV patrol inspection and obstacle avoidance strategy is studied with a 500kV double-circuit ultra-high voltage transmission line on the same tower under six different phase sequences. The line parameters are shown in Table 2.
表2 500kV超高压同塔双回线路主要参数Table 2 Main parameters of 500kV ultra-high voltage double-circuit line on the same tower

在同塔双回输电线路中,按照相序分为6种即ABC-ABC、ABC-ACB、ABC-BCA、ABC-BAC、ABC-CBA、ABC-CAB六种组合。经过理论分析计算,其中ABC-ABC和ABC-BAC两种相序下其电场强度值和变化趋势一致,故可统一归为一类进行避障策略分析;同理ABC-ACB和ABC-CAB、ABC-BCA和ABC-CBA都可以进行归类,故整体做三类进行避障策略分析。In the double-circuit transmission line on the same tower, it is divided into 6 types according to the phase sequence, namely ABC-ABC, ABC-ACB, ABC-BCA, ABC-BAC, ABC-CBA, ABC-CAB six combinations. After theoretical analysis and calculation, the electric field strength values and changing trends of the two phase sequences ABC-ABC and ABC-BAC are consistent, so they can be unified into one category for obstacle avoidance strategy analysis; similarly, ABC-ACB and ABC-CAB, Both ABC-BCA and ABC-CBA can be classified, so as a whole, three types of obstacle avoidance strategies are analyzed.
利用公式(2)可以计算b=40m,故极坐标变换时,对应电场最小波动区间的极坐标原点为(0,40m),相序的改变不影响导线的空间几何位置,故三种分类下进行极坐标变换时,极坐标原点均为(0,40m),分别计算出所有导线和极坐标原点的距离。可知,避雷线和极坐标原点的距离最大,该值为26m,故无人机巡检预警避障时,取和边相导线的距离为30m,即此时无人机和极坐标原点的距离为56m;同理,极限避障时该距离为46m,以此两距离值分析避障策略。Using formula (2), b=40m can be calculated, so when the polar coordinate is transformed, the polar coordinate origin corresponding to the minimum fluctuation interval of the electric field is (0,40m), and the change of the phase sequence does not affect the spatial geometric position of the wire, so the three classifications When performing polar coordinate transformation, the origin of polar coordinates is (0,40m), and the distances between all wires and the origin of polar coordinates are calculated respectively. It can be seen that the distance between the lightning protection line and the polar coordinate origin is the largest, and the value is 26m. Therefore, when the UAV patrols, warns and avoids obstacles, the distance from the side-phase conductor is 30m, that is, the distance between the UAV and the polar coordinate origin at this time. is 56m; in the same way, the distance is 46m in extreme obstacle avoidance, and the obstacle avoidance strategy is analyzed with these two distance values.
1)ABC-ABC和ABC-BAC相序1) ABC-ABC and ABC-BAC phase sequence
极坐标系中r值分别为46m和56m,维持极坐标原点为(0,40m),分析在r两个取值下,沿着上半圆周,观测点电场强度随极坐标角
从图5可知,对应r取值46m和56m,对应的电场强度波动区间较小,分别为2.71kV/m~3.02kV/m和1.55kV/m~1.92kV/m,平均值分别为2.88kV/m和1.75kV/m即极限避障电场强度值为2.88kV/m;预警避障电场强度值为1.75kV/m。It can be seen from Figure 5 that the corresponding electric field intensity fluctuation ranges are relatively small for r values of 46m and 56m, ranging from 2.71kV/m to 3.02kV/m and 1.55kV/m to 1.92kV/m, respectively, with an average value of 2.88kV. /m and 1.75kV/m, that is, the ultimate obstacle avoidance electric field strength value is 2.88kV/m; the early warning obstacle avoidance electric field strength value is 1.75kV/m.
现维持电场强度值分别为2.88kV/m和1.75kV/m,取极坐标原点为(0,40)进行坐标变化,求解出在极坐标下,维持等电场强度值,观测点和极坐标原点的距离r随
从图6可知,在维持电场强度值不变的情况下,观测点和极坐标原点的距离随极坐标角呈现小幅波动,对应电场强度值2.88kV/m和1.75kV/m,观测点与边相导线的距离区间分别为18.1m~21.5m和27.7m~32.5m(已除去极坐标原点离边相导线距离26m,下同),在无人机巡检避障允许范围内即极限避障区间(15~25m)和预警避障区间(25~35m)范围内。It can be seen from Figure 6 that the distance between the observation point and the polar coordinate origin fluctuates slightly with the polar coordinate angle while maintaining the electric field strength value, corresponding to the electric field strength values of 2.88kV/m and 1.75kV/m. The distances of the phase conductors are 18.1m-21.5m and 27.7m-32.5m respectively (the distance between the polar coordinate origin and the side-phase conductors is 26m, the same below), and the limit obstacle avoidance is within the allowable range of UAV inspection and obstacle avoidance. within the range (15-25m) and the early warning and obstacle avoidance range (25-35m).
2)ABC-ACB和ABC-CAB相序2) ABC-ACB and ABC-CAB phase sequence
类似1)的分析可得到在ABC-ACB和ABC-CAB相序下无人机巡检的极限避障电场强度值为2.51kV/m;预警避障电场强度值为1.44kV/m。Similar to 1) analysis, it can be obtained that the ultimate obstacle avoidance electric field strength value of UAV inspection under the ABC-ACB and ABC-CAB phase sequences is 2.51kV/m; the early warning obstacle avoidance electric field strength value is 1.44kV/m.
3)ABC-BCA和ABC-CBA相序3) ABC-BCA and ABC-CBA phase sequence
类似1)的分析可得到在ABC-BCA和ABC-CBA相序下无人机巡检的极限避障电场强度值为2.85kV/m;预警避障电场强度值为1.63kV/m。Similar to 1), it can be obtained that the ultimate obstacle avoidance electric field strength value of UAV inspection under the ABC-BCA and ABC-CBA phase sequences is 2.85kV/m; the early warning obstacle avoidance electric field strength value is 1.63kV/m.
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。The above descriptions are only preferred embodiments of the present invention, and all equivalent changes and modifications made according to the scope of the patent application of the present invention shall fall within the scope of the present invention.
Claims (8)



Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010848541.5ACN111969488A (en) | 2020-08-21 | 2020-08-21 | Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead area |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010848541.5ACN111969488A (en) | 2020-08-21 | 2020-08-21 | Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead area |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111969488Atrue CN111969488A (en) | 2020-11-20 |
Family
ID=73391097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010848541.5APendingCN111969488A (en) | 2020-08-21 | 2020-08-21 | Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead area |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111969488A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113916938A (en)* | 2021-09-29 | 2022-01-11 | 广东电网有限责任公司广州供电局 | A method of infrared detection of wire defects based on high current |
| CN114179093A (en)* | 2021-12-31 | 2022-03-15 | 信通院车联网创新中心(成都)有限公司 | Transformer substation inspection robot system and obstacle avoidance method thereof |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11186831A (en)* | 1997-12-22 | 1999-07-09 | Mitsubishi Electric Corp | Method for simulating electric field strength of loop antenna, loop antenna, and method for creating loop antenna |
| CN103630760A (en)* | 2012-08-28 | 2014-03-12 | 国家广播电影电视总局无线电台管理局 | Field intensity data process system and method |
| CN104898696A (en)* | 2015-05-15 | 2015-09-09 | 国家电网公司 | Unmanned-plane routing-inspection obstacle avoidance method for high-voltage common-tower single-circuit transmission line based on change rate of intensity of electric field |
| CN104977930A (en)* | 2015-05-15 | 2015-10-14 | 国家电网公司 | High-voltage double circuit transmission line unmanned aerial vehicle tour inspection and obstacle avoidance method based on electric field intensity change rate |
| CN105021903A (en)* | 2015-06-08 | 2015-11-04 | 国家电网公司 | A method for measuring and calculating electric field intensity nearby high voltage transmission lines on a hillside |
| CN205263204U (en)* | 2015-12-26 | 2016-05-25 | 清华大学 | Transient state electric -field sensor |
| CN108614579A (en)* | 2018-06-12 | 2018-10-02 | 重庆大学 | The method for early warning of AC power circuit is maked somebody a mere figurehead in a kind of unmanned plane collision avoidance |
| CN109144102A (en)* | 2018-09-19 | 2019-01-04 | 沈阳航空航天大学 | A kind of Path Planning for UAV based on improvement bat algorithm |
| CN110879918A (en)* | 2019-11-13 | 2020-03-13 | 国网天津市电力公司电力科学研究院 | Simulation calculation method of alternating current transmission line electromagnetic environment based on analog charge method |
- 2020
- 2020-08-21CNCN202010848541.5Apatent/CN111969488A/enactivePending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11186831A (en)* | 1997-12-22 | 1999-07-09 | Mitsubishi Electric Corp | Method for simulating electric field strength of loop antenna, loop antenna, and method for creating loop antenna |
| CN103630760A (en)* | 2012-08-28 | 2014-03-12 | 国家广播电影电视总局无线电台管理局 | Field intensity data process system and method |
| CN104898696A (en)* | 2015-05-15 | 2015-09-09 | 国家电网公司 | Unmanned-plane routing-inspection obstacle avoidance method for high-voltage common-tower single-circuit transmission line based on change rate of intensity of electric field |
| CN104977930A (en)* | 2015-05-15 | 2015-10-14 | 国家电网公司 | High-voltage double circuit transmission line unmanned aerial vehicle tour inspection and obstacle avoidance method based on electric field intensity change rate |
| CN105021903A (en)* | 2015-06-08 | 2015-11-04 | 国家电网公司 | A method for measuring and calculating electric field intensity nearby high voltage transmission lines on a hillside |
| CN205263204U (en)* | 2015-12-26 | 2016-05-25 | 清华大学 | Transient state electric -field sensor |
| CN108614579A (en)* | 2018-06-12 | 2018-10-02 | 重庆大学 | The method for early warning of AC power circuit is maked somebody a mere figurehead in a kind of unmanned plane collision avoidance |
| CN109144102A (en)* | 2018-09-19 | 2019-01-04 | 沈阳航空航天大学 | A kind of Path Planning for UAV based on improvement bat algorithm |
| CN110879918A (en)* | 2019-11-13 | 2020-03-13 | 国网天津市电力公司电力科学研究院 | Simulation calculation method of alternating current transmission line electromagnetic environment based on analog charge method |
Non-Patent Citations (4)
| Title |
|---|
| 宋征等: "《Mathcad 7.0入门及其工程应用》", 31 December 1999* |
| 宋福根: "基于输电线路电场分布特征的无人机巡检避障策略研究", 《中国优秀博硕士学位论文全文数据库(博士) 工程科技II辑》* |
| 张岩等: ""角度测量装置在模拟法描绘静电场中的应用"", 《物理与工程》* |
| 谢科连: ""110 kV同塔双回交流输电线路工频电磁场分布规律研究"", 《山东电力技术》* |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113916938A (en)* | 2021-09-29 | 2022-01-11 | 广东电网有限责任公司广州供电局 | A method of infrared detection of wire defects based on high current |
| CN113916938B (en)* | 2021-09-29 | 2024-02-02 | 广东电网有限责任公司广州供电局 | Method for infrared detection of wire defects based on high current |
| CN114179093A (en)* | 2021-12-31 | 2022-03-15 | 信通院车联网创新中心(成都)有限公司 | Transformer substation inspection robot system and obstacle avoidance method thereof |
| CN114179093B (en)* | 2021-12-31 | 2024-06-11 | 信通院车联网创新中心(成都)有限公司 | Substation inspection robot system and obstacle avoidance method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104977930B (en) | High pressure same tower double back transmission line unmanned plane inspection barrier-avoiding method based on electric field strength change rate | |
| CN104898696B (en) | High pressure based on electric-field intensity rate of change is the same as tower list back transmission line unmanned plane inspection barrier-avoiding method | |
| He et al. | Research of multi-rotor UAVs detailed autonomous inspection technology of transmission lines based on route planning | |
| CN102891453B (en) | Unmanned aerial vehicle patrolling line corridor method and device based on millimeter-wave radar | |
| CN112034878B (en) | Unmanned aerial vehicle-based power inspection method and device and electronic equipment | |
| CN103224026B (en) | A kind ofly be applicable to dedicated unmanned helicopter obstacle avoidance system that mountain area electrical network patrols and examines and workflow thereof | |
| CN113050696A (en) | Method, device and equipment for determining routing inspection route of power transmission line and storage medium | |
| CN113703470B (en) | Flying anti-collision method and device based on overhead transmission line electromagnetic field detection | |
| Liu et al. | Study on UAV parallel planning system for transmission line project acceptance under the background of industry 5.0 | |
| CN111969488A (en) | Coordinate transformation-based unmanned aerial vehicle inspection obstacle avoidance method for high-voltage line overhead area | |
| CN202632111U (en) | Electric field measurement obstacle avoidance system for polling live wire by unmanned aerial vehicle | |
| CN102722178A (en) | Electric field measuring obstacle avoidance system and method for live wire routing inspection of unmanned aerial vehicle | |
| CN110031828A (en) | A kind of unmanned plane range-measurement system and method based on transmission line of electricity magnetic distribution | |
| CN105182996A (en) | Unmanned helicopter obstacle avoidance method for routing inspection of live power transmission line on slope | |
| KR102711026B1 (en) | Autonomous drone and power line monitoring system using thereof | |
| Bian et al. | A point-line-based SLAM framework for UAV close proximity transmission tower inspection | |
| CN105159316A (en) | Three dimensional electric field difference obstacle avoidance method for patrolling charged transmission line by unmanned helicopter | |
| CN115435791A (en) | A patrol inspection route planning method based on point cloud vector analysis of transmission line conduction and ground wires | |
| CN117673949A (en) | A safe range detection method for drone inspection of transmission lines | |
| CN115202390A (en) | A method and system for analyzing safety distance of unmanned aerial vehicle inspection | |
| CN111781953A (en) | Obstacle avoidance method of unmanned aerial vehicle in high-voltage line tower area based on electric field intensity envelope | |
| Li et al. | Small UAV urban overhead transmission line autonomous correction inspection system based on radar and RGB camera | |
| CN202817605U (en) | UAV routing-inspection line corridor device based on millimeter-wave radar | |
| Chen et al. | Real-time active detection of targets and path planning using UAVs | |
| CN115792417B (en) | Near electricity detection method and system for overhead working equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20201120 |