CN111785088A - A two-layer collaborative optimization method for ramp merging of connected vehicles - Google Patents
A two-layer collaborative optimization method for ramp merging of connected vehiclesDownload PDFInfo
- Publication number
- CN111785088A CN111785088ACN202010581563.XACN202010581563ACN111785088ACN 111785088 ACN111785088 ACN 111785088ACN 202010581563 ACN202010581563 ACN 202010581563ACN 111785088 ACN111785088 ACN 111785088A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- merging
- mer
- vehicles
- ramp
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Biology (AREA)
- Evolutionary Computation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Engineering & Computer Science (AREA)
- Bioinformatics & Computational Biology (AREA)
- Artificial Intelligence (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Atmospheric Sciences (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明属于车联网体系下网联车辆的智能控制技术领域,具体涉及一种网联车辆匝道合并的双层协同优化方法。The invention belongs to the technical field of intelligent control of networked vehicles under the Internet of Vehicles system, and in particular relates to a double-layer collaborative optimization method for ramp merging of networked vehicles.
背景技术Background technique
交通运输活动的日益频繁和交通堵塞对社会经济问题产生了重大影响。作为交通运输系统的瓶颈之一,公路匝道合并不仅导致巨大的经济和交通成本,而且对增加大气污染物排放和碰撞风险也有副作用。车联网和自动化技术的发展为解决上述问题提供了机会。利用车辆对车辆和车辆对基础设施之间的实时信息传输能力,可以开发更先进、更高效的交通管理系统,减少交通拥堵和空气污染物排放,提高安全性。智能网联车辆通过信息共享和车辆协调来提高安全性和效率。The increasing frequency of transport activities and traffic congestion have had a major impact on socio-economic issues. As one of the bottlenecks in the transportation system, highway-ramp consolidation not only results in huge economic and transportation costs, but also has side effects on increasing air pollutant emissions and collision risk. The development of vehicle networking and automation technology provides opportunities to solve the above problems. Utilizing the real-time information transfer capability between vehicle-to-vehicle and vehicle-to-infrastructure, more advanced and efficient traffic management systems can be developed, reducing traffic congestion and air pollutant emissions, and improving safety. Intelligent and connected vehicles improve safety and efficiency through information sharing and vehicle coordination.
目前,协调和控制智能网联车辆来提高交通效率,减少能源消耗的方法通常可以分为两类:基于规则和基于优化的方法。基于规则的方法主要是一种基于“先进先出”规则的无信号匝道口车辆协调算法,然而没有考虑微观性能(如车辆轨迹)和优化车辆的合并顺序。基于优化的方法分为两种,一种只优化了车辆的运动轨迹,并假设车辆的合并序列是固定的,这是特殊的,其最优性不能得到保证;另外一种的入口匝道控制策略是一个约束非线性优化问题,它为单个车辆提供逐步控制指令,但是忽略了在线解决复杂的优化问题的计算难度。Currently, methods for coordinating and controlling ICVs to improve traffic efficiency and reduce energy consumption can generally be divided into two categories: rule-based and optimization-based methods. The rule-based approach is mainly a “first-in, first-out” rule-based vehicle coordination algorithm for unsignaled on-ramp crossings, however, without considering microscopic properties (such as vehicle trajectories) and optimizing the merging sequence of vehicles. There are two kinds of optimization-based methods, one only optimizes the motion trajectory of the vehicle and assumes that the merging sequence of the vehicle is fixed, which is special and its optimality cannot be guaranteed; the other is an on-ramp control strategy is a constrained nonlinear optimization problem that provides step-by-step control instructions for a single vehicle, but ignores the computational difficulty of solving complex optimization problems online.
发明内容SUMMARY OF THE INVENTION
为了克服现有技术的不足,本发明提出一种网联车辆匝道合并的双层协同优化方法。上层模型优化目标车辆的通行效率,下层模型规划车辆的运动轨迹,提高能源利用率。可实现在不影响安全性的前提下,权衡计算负荷和最优性之间的矛盾,最大限度地提高车辆的机动性和节能性。In order to overcome the deficiencies of the prior art, the present invention proposes a two-layer collaborative optimization method for ramp merging of connected vehicles. The upper-layer model optimizes the traffic efficiency of the target vehicle, and the lower-layer model plans the trajectory of the vehicle to improve energy utilization. It can be realized that the contradiction between the calculation load and the optimality can be weighed without affecting the safety, and the mobility and energy saving of the vehicle can be maximized.
本发明具体为一种网联车辆匝道合并的双层协同优化方法,包括如下步骤:The present invention is specifically a double-layer collaborative optimization method for ramp merging of networked vehicles, comprising the following steps:
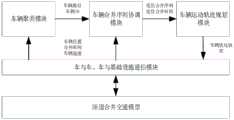
步骤(1)、确定智能网联车辆匝道合并协同控制的框架:车辆聚类模块、车辆合并序列协调模块、车辆运动轨迹规划层、基础设施通信模块和匝道合并交通模型;Step (1), determine the framework of intelligent network-connected vehicle on-ramp merging collaborative control: vehicle clustering module, vehicle merging sequence coordination module, vehicle motion trajectory planning layer, infrastructure communication module and ramp merging traffic model;
步骤(2)、将匝道合并路段分为,序列区,控制区和合并区,基于进入序列区的“先入先出”规则初始化智能网联车辆序号id,依次令id=0,1,2……,N;Step (2): Divide the merged section of the ramp into a sequence area, a control area and a merge area, initialize the serial number id of the intelligent networked vehicle based on the "first-in, first-out" rule entering the sequence area, and set id=0, 1, 2... ..., N;
步骤(3)、收集智能网联车辆参数,实时速度信息以及实时位置信息;Step (3), collect intelligent networked vehicle parameters, real-time speed information and real-time position information;
步骤(4)、通过对车辆初始状态的群体寻源,基于车辆在合并点的潜在冲突对车辆进行聚类;Step (4), clustering the vehicles based on the potential conflicts of the vehicles at the merging point by group sourcing of the initial state of the vehicles;
步骤(5)、基于智能网联车辆匝道合并协同控制的框架建立上下两层调度优化模型,上层决定和分配每辆智能网联车进入合并区域的时间,下层根据上层调度计划确定每辆智能网联车的具体运动轨迹:Step (5): Establish a scheduling optimization model of upper and lower layers based on the framework of intelligent networked vehicle ramp merging collaborative control, the upper layer determines and allocates the time when each intelligent networked vehicle enters the merge area, and the lower layer determines each intelligent networked vehicle according to the upper layer scheduling plan. The specific trajectory of the joint car:
步骤(6)、车辆进入序列区,采用分支定界算法优化上层模型目标函数F;Step (6), the vehicle enters the sequence area, and adopts the branch and bound algorithm to optimize the upper-layer model objective function F;
步骤(7)、车辆进入控制区,将得到的调度计划M传给下层运动规划器;Step (7), the vehicle enters the control area, and the obtained dispatch plan M is passed to the lower-level motion planner;
步骤(8)、根据序号id的智能网联车辆的参数、实时信息和上层的调度信息,判断此车辆是否需要加减速:Step (8), according to the parameters, real-time information and upper-level scheduling information of the intelligent networked vehicle with the serial number id, determine whether the vehicle needs to accelerate or decelerate:
步骤(9)、如果需要加减速,进入加减速模式,完成后报告已完成的车速配置文件和当前所需速度,保持当前速度;Step (9), if acceleration and deceleration are required, enter the acceleration and deceleration mode, report the completed vehicle speed profile and the current required speed after completion, and maintain the current speed;
步骤(10)、如果不需要加减速,此车辆保持当前速度;Step (10), if no acceleration or deceleration is required, the vehicle maintains the current speed;
步骤(11)、判断序号id的智能网联车辆的时间间隔是否小于阈值;Step (11), judge whether the time interval of the intelligent networked vehicle of serial number id is less than the threshold;
步骤(12)、如果是,此车辆进入跟车模式;Step (12), if yes, the vehicle enters the following mode;
步骤(13)、如果否,此车辆忽略的上层的调度信息,并重新参与上层的调度规划返回步骤(5)。Step (13), if not, the vehicle ignores the scheduling information of the upper layer, and re-participates in the scheduling plan of the upper layer and returns to step (5).
所述步骤(5)中的上下两层调度模型具体为:The upper and lower two-layer scheduling models in the step (5) are specifically:
(a)上层优化模型(a) Upper layer optimization model
上层模型以主车道车辆和入口匝道车辆的总行驶时间最小为优化目标,目标函数为:The upper model takes the minimum total travel time of the main lane vehicles and on-ramp vehicles as the optimization objective, and the objective function is:

式中,n和m分别是涉及的主车道车辆数量和涉及的入口匝道车辆数量,t0,i主车道车辆i进入排序区的时间;t0,j匝道车辆j进入排序区的时间;tmer,i对于主车道上的车辆i和tmer,j对于入口匝道车辆j为进入合并区域的最优合并时间;In the formula, n and m are the number of vehicles involved in the main lane and the number of vehicles involved on the on-ramp, respectively, t0, the time when the vehicle i in the main lane enters the sorting area; t0, the time when the vehicle j on the j ramp enters the sorting area; tmer,i for vehicle i on the main lane and tmer,j for on-ramp vehicle j is the optimal merging time into the merging area;
车辆参数约束:Vehicle parameter constraints:
tmer,k>Tmer,k (2)tmer,k >Tmer,k (2)
式中,tmer,k为第k辆智能网联车进入合并区域的时间,Tmer,k为第k辆智能网联车进入极限合并区的时间;In the formula, tmer,k is the time when the k-th ICV enters the merging area, and Tmer,k is the time when the k-th ICV enters the limit merging area;
同一车道上的安全车距的约束:Constraints on safe distances in the same lane:
tmer,s1-tmer,s2≥tsafe1 (3)tmer,s1 -tmer,s2≥t safe1 (3)
式中,tmer,s1和tmer,s2分别是同一车道上智能网联车进入合并区域的时间,tsafe1是同一车道上相邻合流车辆之间的时间间隔,对于主车道车辆和入口匝道车辆可以不同;In the formula, tmer,s1 and tmer,s2 are the time when the intelligent networked vehicles on the same lane enter the merging area respectively, tsafe1 is the time interval between adjacent merging vehicles on the same lane, for the main lane vehicles and the on-ramp Vehicles can be different;
不同车道上的安全车距的约束:Constraints on safe distances in different lanes:
tmer,i-tmer,j+Cwi,j≥tsafe2 (4)tmer,i -tmer,j +Cwi,j≥t safe2 (4)
tmer,j-tmer,i+C(1-wi,j)≥tsafe2 (5)tmer,j -tmer,i +C(1-wi,j )≥t safe2 (5)
式中,wi、j为引入的二进制变量,只能取值为0或1,C是一个足够大的常数,绝对大于tsafe2+|tmer,i-tmer,j|,tsafe2是合流点上不同车道上相邻合流车辆之间的安全时间间隔。In the formula, wi and j are the binary variables introduced, which can only be 0 or 1, and C is a large enough constant, absolutely greater than tsafe2 +|tmer,i -tmer,j |, tsafe2 is The safe time interval between adjacent merging vehicles on different lanes at the merging point.
(b)下层模型(b) Lower model
下层模型是一种启发式车辆轨迹规划的方法,根据上层分配给每辆车的合并时间,然后根据其当前状态属性来确定车辆是否能够保持当前速度vi或是否需要加速/减速来遵循分配。如果使用当前速度到达合并点的时间大于指定合并时间的剩余时间,则车辆需要加速以达到目标,反之亦然。我们假设车辆具有恒定的加速/减速率,直到它们达到所需的巡航速度。The lower layer model is a heuristic approach to vehicle trajectory planning, based on the merging time assigned to each vehicle by the upper layer, and then based on its current state attributes to determine whether the vehicle is able to maintain the current speed vi or whether it needs to accelerate/decelerate to follow the assignment. If the time to reach the merge point using the current speed is greater than the remaining time of the specified merge time, the vehicle needs to accelerate to reach the target and vice versa. We assume that the vehicles have a constant acceleration/deceleration rate until they reach the desired cruising speed.
进一步,下层模型中的加减速模式为:Further, the acceleration and deceleration modes in the lower model are:
加速模式:Acceleration Mode:
如果

减速模式:Deceleration mode:
如果

本发明的有益效果为:The beneficial effects of the present invention are:
(1)考虑在计算负荷和最优性之间存在权衡,通过上层最优化模型和下层解析解的形式较大程度地提高了最优性和最大限度地降低了计算量;(1) Considering the trade-off between the computational load and the optimality, the optimality is greatly improved and the computational load is minimized by the upper-layer optimization model and the lower-layer analytical solution;
(2)采用智能网联车辆匝道合并协同控制的上下两层调度优化模型,上层决定和分配每辆智能网联车进入合并区域的时间,下层确定每辆智能网联车的具体运动轨迹,有助于匝道合并的交通效率和能源利用率的提高;(2) Adopt the upper and lower two-layer scheduling optimization model of intelligent networked vehicle ramp merge collaborative control. The upper layer determines and allocates the time when each intelligent networked vehicle enters the merge area, and the lower layer determines the specific motion trajectory of each intelligent networked vehicle. There are Improved traffic efficiency and energy efficiency that contribute to on-ramp consolidation;
(3)通过下层的运动轨迹规划,可以根据基础设施的实际情况灵活选择中央控制器或者智能网联车辆本地计算模块来计算;(3) Through the motion trajectory planning of the lower layer, the central controller or the local computing module of the intelligent networked vehicle can be flexibly selected to calculate according to the actual situation of the infrastructure;
(4)通过下层计算,满足不了最小时间间隔的智能网联车辆将重新返回上层调度进行调度计算,使系统具有鲁棒性。(4) Through the lower-level calculation, the intelligent networked vehicles that cannot meet the minimum time interval will return to the upper-level scheduling for scheduling calculation, making the system robust.
附图说明Description of drawings
图1为本发明智能网联车辆匝道合并协同控制的框架;Fig. 1 is the framework of the intelligent networked vehicle ramp merge collaborative control of the present invention;
图2为本发明公路匝道合并的模型图;Fig. 2 is the model diagram of highway ramp merge of the present invention;
图中,1表示主干道上的智能网联车辆,2代表匝道上的智能网联车辆,3表示合并区域,4表示通信基础设施。In the figure, 1 represents the ICV on the main road, 2 represents the ICV on the ramp, 3 represents the merge area, and 4 represents the communication infrastructure.
图3为本发明网联车辆匝道合并的双层协同优化方法流程图。FIG. 3 is a flow chart of the double-layer collaborative optimization method for ramp merging of connected vehicles according to the present invention.
具体实施方式Detailed ways
下面结合附图对本发明一种网联车辆匝道合并的双层协同优化方法的具体实施方式做详细阐述:Below in conjunction with the accompanying drawings, the specific implementation of a double-layer collaborative optimization method for ramp merging of connected vehicles of the present invention will be described in detail:
图1为智能网联车辆匝道合并协同控制的框架,主要包含四个模块和一个模型:车辆聚类模块、车辆合并序列协调模块、车辆运动轨迹规划层、基础设施通信模块和匝道合并交通模型。Figure 1 shows the framework of intelligent networked vehicle-ramp merging collaborative control, which mainly includes four modules and one model: vehicle clustering module, vehicle merging sequence coordination module, vehicle trajectory planning layer, infrastructure communication module and ramp merging traffic model.
模块和模型之间具备完善的通信网络以便进行必要的信息交互。车辆聚类模块和车辆合并序列协调模块通过基础设施通信模块收集匝道合并交通模型中的车辆参数和实时信息,并且通过聚类程序和优化程序求解得到车辆的最优合并序列和进入合并区域的最优时间;然后把结果传递到车辆运动轨迹规划层,通过计算,将结果通过基础设施通信模块传递给匝道合并交通模型,控制车辆的具体运动。如图2,上述过程对应实际的路况为,车辆聚类模块、车辆合并序列协调模块和车辆运动轨迹规划模块计算过程,将发生在合并区域之前。具体匝道合并过程发生在合并区域。There is a complete communication network between modules and models for necessary information exchange. The vehicle clustering module and the vehicle merging sequence coordination module collect the vehicle parameters and real-time information in the on-ramp merging traffic model through the infrastructure communication module, and obtain the optimal merging sequence of vehicles and the maximum entering the merging area through the clustering program and the optimization program. Then, the results are transmitted to the vehicle trajectory planning layer, and through the calculation, the results are transmitted to the ramp merged traffic model through the infrastructure communication module to control the specific movement of the vehicle. As shown in Figure 2, the above process corresponds to the actual road conditions. The calculation process of the vehicle clustering module, the vehicle merging sequence coordination module and the vehicle motion trajectory planning module will occur before the merging area. The specific ramp merging process takes place in the merging area.
下面针对具体控制方法做如下阐述:The following describes the specific control methods as follows:
基于智能网联车辆匝道合并协同控制的框架建立上下两层调度优化模型,上层决定和分配每辆智能网联车进入合并区域的时间,下层根据上层调度计划确定每辆智能网联车的具体运动轨迹。Based on the framework of ICV ramp merge collaborative control, a scheduling optimization model of upper and lower layers is established. The upper layer determines and allocates the time when each ICV enters the merging area, and the lower layer determines the specific movement of each ICV according to the upper-layer scheduling plan. trajectory.
(1)上层优化模型(1) Upper layer optimization model
上层模型以主车道车辆和入口匝道车辆的总行驶时间最小为优化目标,目标函数为:The upper model takes the minimum total travel time of the main lane vehicles and on-ramp vehicles as the optimization objective, and the objective function is:

式中,n和m分别是涉及的主车道车辆数量和涉及的入口匝道车辆数量,t0,i主车道车辆i进入排序区的时间;t0,j匝道车辆j进入排序区的时间;tmer,i对于主车道上的车辆i和tmer,j对于入口匝道车辆j为进入合并区域的最优合并时间;假设车辆服从参数为3的泊松分布进入序列区。In the formula, n and m are the number of vehicles involved in the main lane and the number of vehicles involved on the on-ramp, respectively, t0, the time when the vehicle i in the main lane enters the sorting area; t0, the time when the vehicle j on the j ramp enters the sorting area; tmer,i for vehicle i on the main lane and tmer,j for on-ramp vehicle j is the optimal merging time to enter the merging area; it is assumed that the vehicle follows a Poisson distribution with
车辆参数约束:Vehicle parameter constraints:
tmer,k>Tmer,k (2)tmer,k >Tmer,k (2)
式中,tmer,k为第k辆智能网联车进入合并区的时间,Tmer,k为第k辆智能网联车进入极限合并区的时间,假设Tmer,k取值为2.23秒;In the formula, tmer,k is the time for the k-th ICV to enter the merging area, Tmer,k is the time for the k-th ICV to enter the limit merging area, assuming that Tmer,k is 2.23 seconds ;
同一车道上的安全车距的约束:Constraints on safe distances in the same lane:
tmer,s1-tmer,s2≥tsafe1 (3)tmer,s1 -tmer,s2≥t safe1 (3)
式中,tmer,s1和tmer,s2分别是同一车道上智能网联车进入极限合并区的时间,tsafe1是同一车道上相邻合流车辆之间的时间间隔,对于主车道车辆和入口匝道车辆可以不同,假设主车道车辆和入口匝道车辆的tsafe1分别为0.8s和1.2s。In the formula, tmer, s1 and tmer, s2 are the time for the intelligent networked vehicles on the same lane to enter the limit merging area respectively, tsafe1 is the time interval between adjacent merging vehicles on the same lane, for the main lane vehicles and the entrance Ramp vehicles can be different, assuming tsafe1 for main lane vehicles and on-ramp vehicles are 0.8s and 1.2s, respectively.
不同车道上的安全车距的约束:Constraints on safe distances in different lanes:
tmer,i-tmer,j+Cwi,j≥tsafe2 (4)tmer,i -tmer,j +Cwi,j≥t safe2 (4)
tmer,j-tmer,i+C(1-wi,j)≥tsafe2 (5)tmer,j -tmer,i +C(1-wi,j )≥t safe2 (5)
式中,wi,j为引入的二进制变量,只能取值为0或1,C是一个足够大的常数,具体取值为3000,tsafe2是合流点上不同车道上相邻合流车辆之间的安全时间间隔,假设tsafe2取值为1.8s。使用分支定界算法优化上层模型目标函数F并将得到的调度计划M传给下层运动规划器。In the formula, wi, j are the binary variables introduced, which can only be 0 or 1, C is a sufficiently large constant, and the specific value is 3000, and tsafe2 is the difference between adjacent merging vehicles on different lanes at the merging point. The safe time interval between tsafe2 is assumed to be 1.8s. The upper-layer model objective function F is optimized using the branch-and-bound algorithm and the obtained scheduling plan M is passed to the lower-layer motion planner.
(2)下层模型(2) Lower model
下层模型是一种启发式车辆轨迹规划的方法,根据上层分配给每辆车的合并时间,然后根据其当前状态属性来确定车辆是否能够保持当前速度vi或是否需要加速/减速来遵循分配。如果使用当前速度到达合并点的时间大于指定合并时间的剩余时间,则车辆需要加速以达到目标,反之亦然。我们假设车辆具有恒定的加速/减速率为2.5m/s2和-2.5m/s2,直到它们达到所需的巡航速度。The lower layer model is a heuristic approach to vehicle trajectory planning, based on the merging time assigned to each vehicle by the upper layer, and then based on its current state attributes to determine whether the vehicle is able to maintain the current speed vi or whether it needs to accelerate/decelerate to follow the assignment. If the time to reach the merge point using the current speed is greater than the remaining time of the specified merge time, the vehicle needs to accelerate to reach the target and vice versa. We assume that the vehicles have constant acceleration/deceleration rates of 2.5m/s2 and -2.5m/s2 until they reach the desired cruising speed.
进一步,下层模型中的加减速模式为:Further, the acceleration and deceleration modes in the lower model are:
加速模式:Acceleration Mode:
如果

减速模式:Deceleration mode:
如果

图3为本发明网联车辆匝道合并的双层协同优化方法。采用分层周期性的方法求解所提双层优化模型,假定求解周期设为2.4s。通过上下层模型之间周期计算将规划源源不断的进入匝道合并路段的智能网联车辆。上层模型通过分支定界法计算求解,下层模型是一种启发式车辆轨迹规划的方法,根据上层分配给每辆车的合并时间,然后根据其当前状态属性来确定车辆是否能够保持当前速度或是否需要加速/减速来遵循分配。如果保持当前速度到达合并点的时间大于指定合并时间的剩余时间,则车辆需要加速以达到目标,反之亦然。我们假设车辆具有恒定的加速或减速率,直到它们达到所需的巡航速度。根据以上的实施方式,仿真的所得结果与现有的基于“先入先出”方法的仿真结果相比较,如下表格所示。FIG. 3 is a two-layer collaborative optimization method for ramp merging of connected vehicles according to the present invention. The proposed two-layer optimization model is solved by the method of layered periodicity, assuming that the solution period is set to 2.4s. Through the periodic calculation between the upper and lower models, a steady stream of intelligent networked vehicles entering the merged section of the ramp will be planned. The upper model is calculated and solved by the branch and bound method, and the lower model is a heuristic vehicle trajectory planning method, according to the merging time allocated to each vehicle by the upper layer, and then according to its current state attribute to determine whether the vehicle can maintain the current speed or whether Acceleration/deceleration is required to follow the assignment. If the time to maintain the current speed to the merge point is greater than the remaining time of the specified merge time, the vehicle needs to accelerate to reach the target and vice versa. We assume that the vehicles have a constant rate of acceleration or deceleration until they reach the desired cruising speed. According to the above embodiment, the obtained results of the simulation are compared with the existing simulation results based on the "first-in-first-out" method, as shown in the following table.

由此可知,本发明提出的方法不仅将通行效率提高了大约21%,而且减少能耗29.07%。It can be seen that the method proposed by the present invention not only improves the traffic efficiency by about 21%, but also reduces the energy consumption by 29.07%.
Claims (1)
Translated fromChinese




Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010581563.XACN111785088B (en) | 2020-06-23 | 2020-06-23 | A two-layer collaborative optimization method for ramp merging of connected vehicles |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010581563.XACN111785088B (en) | 2020-06-23 | 2020-06-23 | A two-layer collaborative optimization method for ramp merging of connected vehicles |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111785088Atrue CN111785088A (en) | 2020-10-16 |
| CN111785088B CN111785088B (en) | 2021-08-20 |
Family
ID=72757329
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010581563.XAActiveCN111785088B (en) | 2020-06-23 | 2020-06-23 | A two-layer collaborative optimization method for ramp merging of connected vehicles |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111785088B (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113011634A (en)* | 2021-02-09 | 2021-06-22 | 北京工业大学 | Intelligent network connection ramp merging method based on distributed optimal control |
| CN114863681A (en)* | 2022-04-29 | 2022-08-05 | 上海理工大学 | Vehicle track optimization method for collision elimination of main line entrance ramp confluence area |
| CN115083140A (en)* | 2022-04-18 | 2022-09-20 | 同济大学 | Special intelligent network-connected automobile expressway road management and control method, system and storage medium |
| CN116403436A (en)* | 2023-02-28 | 2023-07-07 | 武汉科技大学 | A Coordinated Control Method for Multi-vehicle Network |
| CN116524735A (en)* | 2022-12-30 | 2023-08-01 | 长安大学 | A double-layer optimization control method and system for the merge area of an expressway entrance ramp |
| CN117649764A (en)* | 2023-11-30 | 2024-03-05 | 合肥工业大学 | Double-layer cooperative control method considering traffic risk of expressway junction area in networking environment |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101246513A (en)* | 2008-03-20 | 2008-08-20 | 天津市市政工程设计研究院 | Simulation Design System and Type Selection Method of Urban Expressway Interchange |
| CN102542793A (en)* | 2012-01-11 | 2012-07-04 | 东南大学 | Active control method of oversaturated traffic situation at intersection group |
| CN103646542A (en)* | 2013-12-24 | 2014-03-19 | 北京四通智能交通系统集成有限公司 | Forecasting method and device for traffic impact ranges |
| CN104008647A (en)* | 2014-06-12 | 2014-08-27 | 北京航空航天大学 | Road traffic energy consumption quantization method based on motor vehicle running modes |
| CN104835319A (en)* | 2015-04-07 | 2015-08-12 | 同济大学 | Method for estimating vehicle import behavior on high-grade road bottleneck zone on-ramp |
| CN107093332A (en)* | 2017-07-06 | 2017-08-25 | 哈尔滨工业大学 | City expressway ring road merging area safety pre-warning system |
| US20180050693A1 (en)* | 2016-08-16 | 2018-02-22 | University Of Central Florida Research Foundation, Inc. | Wrong way vehicle detection and control system |
| CN110247701A (en)* | 2018-03-09 | 2019-09-17 | 埃尔贝克斯视象株式会社 | The communications infrastructure device and branch stake tool of intelligent dwelling or business place, utilization and the communication means for operating intelligent electrical device |
| CN110503833A (en)* | 2019-08-29 | 2019-11-26 | 桂林电子科技大学 | A linkage control method for on-ramps based on deep residual network model |
| CN110570049A (en)* | 2019-09-19 | 2019-12-13 | 西南交通大学 | A low-level control method for collaborative optimization of mixed traffic flows on expressways |
| CN110599772A (en)* | 2019-09-19 | 2019-12-20 | 西南交通大学 | Mixed traffic flow cooperative optimization control method based on double-layer planning |
| US20200011696A1 (en)* | 2018-07-03 | 2020-01-09 | Honeywell International Inc. | Indoor wayfinding to equipment and infrastructure |
- 2020
- 2020-06-23CNCN202010581563.XApatent/CN111785088B/enactiveActive
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101246513A (en)* | 2008-03-20 | 2008-08-20 | 天津市市政工程设计研究院 | Simulation Design System and Type Selection Method of Urban Expressway Interchange |
| CN102542793A (en)* | 2012-01-11 | 2012-07-04 | 东南大学 | Active control method of oversaturated traffic situation at intersection group |
| CN103646542A (en)* | 2013-12-24 | 2014-03-19 | 北京四通智能交通系统集成有限公司 | Forecasting method and device for traffic impact ranges |
| CN104008647A (en)* | 2014-06-12 | 2014-08-27 | 北京航空航天大学 | Road traffic energy consumption quantization method based on motor vehicle running modes |
| CN104835319A (en)* | 2015-04-07 | 2015-08-12 | 同济大学 | Method for estimating vehicle import behavior on high-grade road bottleneck zone on-ramp |
| US20180050693A1 (en)* | 2016-08-16 | 2018-02-22 | University Of Central Florida Research Foundation, Inc. | Wrong way vehicle detection and control system |
| CN107093332A (en)* | 2017-07-06 | 2017-08-25 | 哈尔滨工业大学 | City expressway ring road merging area safety pre-warning system |
| CN110247701A (en)* | 2018-03-09 | 2019-09-17 | 埃尔贝克斯视象株式会社 | The communications infrastructure device and branch stake tool of intelligent dwelling or business place, utilization and the communication means for operating intelligent electrical device |
| US20200011696A1 (en)* | 2018-07-03 | 2020-01-09 | Honeywell International Inc. | Indoor wayfinding to equipment and infrastructure |
| CN110503833A (en)* | 2019-08-29 | 2019-11-26 | 桂林电子科技大学 | A linkage control method for on-ramps based on deep residual network model |
| CN110570049A (en)* | 2019-09-19 | 2019-12-13 | 西南交通大学 | A low-level control method for collaborative optimization of mixed traffic flows on expressways |
| CN110599772A (en)* | 2019-09-19 | 2019-12-20 | 西南交通大学 | Mixed traffic flow cooperative optimization control method based on double-layer planning |
Non-Patent Citations (6)
| Title |
|---|
| A.A. AKHMETOV: "Calculation of Composites Ramp Rate Sensitivity", 《IEEE TRANSACTIONS ON MAGNETICS》* |
| XINRONG LIANG: "A Center-Rule-Based Neighborhood Search", 《2016 INTERNATIONAL CONFERENCE ON SMART CITY AND SYSTEMS ENGINEERING (ICSCSE)》* |
| 乔良: "基于强化学习的无人驾驶匝道汇入模型", 《计算机工程》* |
| 梁振羽: "快速路入口匝道与可变限速协同控制策略研究", 《中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》* |
| 王龙飞: "基于车路协同的匝道合流算法研究与仿真", 《中国优秀硕士学位论文全文数据库》* |
| 覃林: "考虑排放的城市高架快速路入口匝道控制策略研究", 《中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》* |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113011634A (en)* | 2021-02-09 | 2021-06-22 | 北京工业大学 | Intelligent network connection ramp merging method based on distributed optimal control |
| CN113011634B (en)* | 2021-02-09 | 2024-03-22 | 北京工业大学 | Intelligent network connection ramp merging method based on distributed optimal control |
| CN115083140A (en)* | 2022-04-18 | 2022-09-20 | 同济大学 | Special intelligent network-connected automobile expressway road management and control method, system and storage medium |
| CN115083140B (en)* | 2022-04-18 | 2023-09-26 | 同济大学 | Intelligent network-connected automobile expressway special road management and control method, system and storage medium |
| CN114863681A (en)* | 2022-04-29 | 2022-08-05 | 上海理工大学 | Vehicle track optimization method for collision elimination of main line entrance ramp confluence area |
| CN116524735A (en)* | 2022-12-30 | 2023-08-01 | 长安大学 | A double-layer optimization control method and system for the merge area of an expressway entrance ramp |
| CN116403436A (en)* | 2023-02-28 | 2023-07-07 | 武汉科技大学 | A Coordinated Control Method for Multi-vehicle Network |
| CN117649764A (en)* | 2023-11-30 | 2024-03-05 | 合肥工业大学 | Double-layer cooperative control method considering traffic risk of expressway junction area in networking environment |
| CN117649764B (en)* | 2023-11-30 | 2025-09-23 | 合肥工业大学 | Two-layer cooperative control method considering traffic risks in expressway merging areas under connected environment |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111785088B (en) | 2021-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111785088A (en) | A two-layer collaborative optimization method for ramp merging of connected vehicles | |
| Deng et al. | Cooperative platoon formation of connected and autonomous vehicles: Toward efficient merging coordination at unsignalized intersections | |
| Jin et al. | Platoon-based multi-agent intersection management for connected vehicle | |
| CN114973733B (en) | A method for optimizing trajectory control of connected autonomous vehicles under mixed flow at signalized intersections | |
| Wang et al. | A reinforcement learning empowered cooperative control approach for IIoT-based virtually coupled train sets | |
| Pei et al. | Distributed cooperative driving in multi-intersection road networks | |
| CN106672028A (en) | Double-layer subway traffic flow optimization control method based on robust strategy | |
| Bie et al. | Bus scheduling of overlapping routes with multi-vehicle types based on passenger OD data | |
| Li et al. | Comprehensive optimization of a metro timetable considering passenger waiting time and energy efficiency | |
| CN114463974B (en) | Cooperative control system and method for mixed vehicle group under priority road right condition | |
| Shangguan et al. | High-speed train platoon dynamic interval optimization based on resilience adjustment strategy | |
| CN105083334B (en) | Subway train collision early warning method | |
| Zhang et al. | Virtual traffic signals: Safe, rapid, efficient and autonomous driving without traffic control | |
| Li et al. | Integrated optimization on energy saving and quality of service of urban rail transit system | |
| CN114894209A (en) | Unmanned mine card path planning collision avoidance method based on vehicle management system | |
| CN107776613A (en) | Subway traffic flow optimization control system | |
| CN118230583A (en) | Signal-free intersection vehicle passing sequence decision and track optimization method and system | |
| Wang et al. | Integrated train timetable and rolling stock circulation plan scheduling with the virtual coupling technology for a Y-shaped metro line | |
| Liu et al. | A real-time rescheduling approach using loop iteration for high-speed railway traffic | |
| Ma et al. | Virtual-Coupling-Based Timetable Rescheduling for Heavy-Haul Railways Under Disruptions | |
| Liu et al. | Dynamic bus scheduling of multiple routes based on joint optimization of departure time and speed | |
| CN109857104B (en) | An unmanned driving technology based on highway virtual track | |
| CN105083322B (en) | Subway train collision early warning method | |
| Liu et al. | Modelling and simulation of cooperative control for bus rapid transit vehicle platoon in a connected vehicle environment | |
| Li et al. | A time and energy efficient merging control for platoon formation of connected and automated electric vehicles at on-ramps |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |