CN111601542A - Capacitively coupled return path pads with separable array elements - Google Patents
Capacitively coupled return path pads with separable array elementsDownload PDFInfo
- Publication number
- CN111601542A CN111601542ACN201880084135.7ACN201880084135ACN111601542ACN 111601542 ACN111601542 ACN 111601542ACN 201880084135 ACN201880084135 ACN 201880084135ACN 111601542 ACN111601542 ACN 111601542A
- Authority
- CN
- China
- Prior art keywords
- surgical
- patient
- return pad
- generator
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

























Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4887—Locating particular structures in or on the body
- A61B5/4893—Nerves
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1107—Measuring contraction of parts of the body, e.g. organ or muscle
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0247—Pressure sensors
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Neurology (AREA)
- Surgical Instruments (AREA)
Abstract
Description
Translated fromChinese相关申请的交叉引用CROSS-REFERENCE TO RELATED APPLICATIONS
本专利申请按照美国法典第35卷第119条(e)款的规定要求2018年3月30日提交的标题为“CAPACITIVE COUPLED RETURN PATH PAD WITH SEPARABLE ARRAY ELEMENTS”的美国临时专利申请62/650,898的较早提交日期的权益,该专利申请的公开内容据此全文以引用方式并入。This patent application is subject to the provisions of 35 U.S.C. § 119(e) as claimed in U.S. Provisional Patent Application 62/650,898, filed March 30, 2018, entitled "CAPACITIVE COUPLED RETURN PATH PAD WITH SEPARABLE ARRAY ELEMENTS" To the benefit of the earlier filing date, the disclosure of this patent application is hereby incorporated by reference in its entirety.
本专利申请按照美国法典第35卷第119条(e)款的规定还要求2018年3月30日提交的标题为“SURGICAL SYSTEMS WITH OPTIMIZED SENSING CAPABILITIES”的美国临时专利申请序列号62/650,887、2018年3月30日提交的标题为“SURGICAL SMOKE EVACUATIONSENSING AND CONTROLS)”的美国临时专利申请序列号62/650,877、2018年3月30日提交的标题为“SMOKE EVACUATION MODULE FOR INTERACTIVE SURGICAL PLATFORM”的美国临时专利申请序列号62/650,882的优先权的权益,这些临时专利申请中的每个的公开内容全文以引用方式并入本文。This patent application also requires U.S. Provisional Patent Application Serial No. 62/650,887, 2018, filed March 30, 2018, entitled "SURGICAL SYSTEMS WITH OPTIMIZED SENSING CAPABILITIES," pursuant to 35 U.S.C. § 119(e) U.S. Provisional Patent Application Serial No. 62/650,877, filed March 30, 2018, entitled "SURGICAL SMOKE EVACUATION SENSING AND CONTROLS)," U.S. Provisional Patent Application Serial No. 62/650,877, filed March 30, 2018 To the benefit of priority of Patent Application Serial No. 62/650,882, the disclosures of each of these provisional patent applications are incorporated herein by reference in their entirety.
本专利申请按照美国法典第35卷第119条(e)款的规定还要求2018年3月8日提交的标题为“TEMPERATURE CONTROL IN ULTRASONIC DEVICE AND CONTROL SYSTEMTHEREFOR”的美国临时专利申请序列号62/640,417和2018年3月8日提交的标题为“ESTIMATING STATE OF ULTRASONIC END EFFECTOR AND CONTROL SYSTEM THEREFOR”的美国临时专利申请序列号62/640,415的优先权的权益,这些临时专利申请中的每个的公开内容全文以引用方式并入本文。This patent application also claims U.S. Provisional Patent Application Serial No. 62/640,417, filed March 8, 2018, entitled "TEMPERATURE CONTROL IN ULTRASONIC DEVICE AND CONTROL SYSTEMTHEREFOR," pursuant to 35 U.S.C. § 119(e) and the benefit of priority to U.S. Provisional Patent Application Serial No. 62/640,415, filed March 8, 2018, entitled "ESTIMATING STATE OF ULTRASONIC END EFFECTOR AND CONTROL SYSTEM THEREFOR," the disclosure of each of these provisional patent applications The entire contents of this document are incorporated herein by reference.
本专利申请按照美国法典第35卷第119条(e)款的规定还要求2017年12月28日提交的标题为“INTERACTIVE SURGICAL PLATFORM”的美国临时专利申请序列号62/611,341、2017年12月28日提交的标题为“CLOUD-BASED MEDICAL ANALYTICS”的美国临时专利申请序列号62/611,340和2017年12月28日提交的标题为“ROBOT ASSISTED SURGICAL PLATFORM”的美国临时专利申请序列号62/611,339的优先权的权益,这些临时专利申请中的每个的公开内容全文以引用方式并入本文。This patent application also claims U.S. Provisional Patent Application Serial No. 62/611,341, filed December 28, 2017, entitled "INTERACTIVE SURGICAL PLATFORM," filed December 28, 2017, pursuant to 35 U.S.C. § 119(e) U.S. Provisional Patent Application Serial No. 62/611,340, filed on 28, entitled "CLOUD-BASED MEDICAL ANALYTICS," and U.S. Provisional Patent Application Serial No. 62/611,339, entitled "ROBOT ASSISTED SURGICAL PLATFORM," filed on December 28, 2017 to the benefit of priority, the disclosures of each of these provisional patent applications are incorporated herein by reference in their entirety.
背景技术Background technique
本专利申请公开了一种发明,该发明总体上且在各个方面涉及外科系统以及电外科系统的返回垫。This patent application discloses an invention that relates generally and in various aspects to surgical systems and return pads for electrosurgical systems.
电外科系统通常利用发生器向有源电极供应电外科能量(例如,射频水平的交流电),该有源电极将该电外科能量施加到患者身体。施加到患者身体的电外科能量用于加热患者的组织(以密封和/或切割组织),并且通常离开患者身体至返回垫,该返回垫可施加到患者的身体或可电容耦合到患者的身体。返回垫连接到返回路径布线,该返回路径布线继而连接回发生器。换句话讲,返回垫和返回路径布线共同形成电外科系统的电返回路径。Electrosurgical systems typically utilize generators to supply electrosurgical energy (eg, alternating current at radio frequency levels) to active electrodes that apply the electrosurgical energy to the patient's body. Electrosurgical energy applied to the patient's body is used to heat the patient's tissue (to seal and/or cut the tissue) and typically leaves the patient's body to a return pad that can be applied to the patient's body or can be capacitively coupled to the patient's body . The return pad is connected to the return path wiring, which in turn is connected back to the generator. In other words, the return pad and return path wiring together form the electrical return path of the electrosurgical system.
与电外科手术有关的一个担心是,返回垫的离散电极是否足够大和/或具有足够的表面积以充分捕获和承载引入到患者的身体中的电外科能量,从而可避免不必要的患者灼伤。返回垫的大小通常被设计成在电外科能量离开患者时保持电流密度足够低。否则,热量可在患者体内积聚并导致灼伤。One concern associated with electrosurgery is whether the discrete electrodes of the return pad are large enough and/or have sufficient surface area to adequately capture and carry the electrosurgical energy introduced into the patient's body so that unnecessary patient burns can be avoided. The return pad is typically sized to keep the current density low enough as the electrosurgical energy leaves the patient. Otherwise, heat can build up in the patient and cause burns.
当利用电外科能量切割患者的目标组织时,一个担心是在电外科手术期间可能无意中损伤和/或切断一个或多个神经,从而潜在地导致患者经受肌肉无力、疼痛、麻木、麻痹和/或其它不期望的结果。尽管外科医生通常对神经的位置有很好的了解,并因此能够避开它们,但情况并非总是如此。例如,如果患者的区域变形、受损或以其它方式偏离被认为正常的情况,则确定给定神经在该区域内的位置可能是困难的。当给定神经在该区域内的位置不容易辨别时,无意中损伤或切断神经的可能性增加。When utilizing electrosurgical energy to cut a patient's target tissue, one concern is that one or more nerves may be inadvertently damaged and/or severed during electrosurgery, potentially causing the patient to experience muscle weakness, pain, numbness, paralysis and/or or other undesired results. Although surgeons usually have a good understanding of where nerves are located and are therefore able to avoid them, this is not always the case. For example, if a patient's area is deformed, damaged, or otherwise deviated from what is considered normal, it may be difficult to determine the location of a given nerve within that area. When the location of a given nerve within the region is not easily discernible, the likelihood of inadvertently injuring or severing the nerve increases.
发明内容SUMMARY OF THE INVENTION
在一个方面,提供了一种电外科系统的返回垫。该返回垫包括:多个导电构件,该多个导电构件被配置成能够接收施加到患者的射频电流;以及多个感测装置,该多个感测装置被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动。In one aspect, a return pad for an electrosurgical system is provided. The return pad includes: a plurality of conductive members configured to receive radio frequency current applied to the patient; and a plurality of sensing devices configured to detect at least one of the following By: neural control signals applied to the patient; and movement of the patient's anatomical features caused by the application of the neural control signals.
在另一方面,提供了一种电外科系统。该电外科系统包括:发生器,该发生器被配置成能够供应射频交流电;器械,该器械被配置成能够将交流电施加到患者;返回垫,该返回垫能够电容耦合到患者,其中该返回垫包括:多个导电构件,该多个导电构件被配置成能够传导射频电流,其中该多个导电构件能够电容耦合到患者并且能够选择性地耦合到发生器;多个感测装置,该多个感测装置被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动;以及耦合到返回垫和发生器的导体。In another aspect, an electrosurgical system is provided. The electrosurgical system includes: a generator configured to supply radio frequency alternating current; an instrument configured to apply alternating current to a patient; a return pad capable of capacitively coupling to the patient, wherein the return pad Comprising: a plurality of conductive members configured to conduct radio frequency current, wherein the plurality of conductive members can be capacitively coupled to a patient and selectively coupled to a generator; a plurality of sensing devices, the plurality of The sensing device is configured to detect at least one of: a neural control signal applied to the patient; and movement of an anatomical feature of the patient caused by application of the neural control signal; and a conductor coupled to the return pad and the generator.
在又一方面,提供了一种电外科系统的返回垫。该返回垫包括:多个电极,该多个电极被配置用于与患者电容耦合;以及感测装置的阵列,该感测装置的阵列被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动。In yet another aspect, a return pad for an electrosurgical system is provided. The return pad includes: a plurality of electrodes configured for capacitive coupling with the patient; and an array of sensing devices configured to detect at least one of: applied to the patient and the movement of the patient's anatomical features caused by the application of the neural control signal.
附图说明Description of drawings
各种方面的特征在所附权利要求书中进行了特别描述。然而,通过参考以下结合如下附图所作的说明可最好地理解所述多个方面(有关手术组织和方法)及其进一步的目的和优点。The various aspects are characterized with particularity in the appended claims. However, the various aspects (with respect to surgical tissue and methods) and their further objects and advantages are best understood by reference to the following description taken in conjunction with the following drawings.
图1为根据本公开的至少一个方面的计算机实现的交互式外科系统的框图。1 is a block diagram of a computer-implemented interactive surgical system in accordance with at least one aspect of the present disclosure.
图2为根据本公开的至少一个方面的用于在手术室中执行外科规程的外科系统。2 is a surgical system for performing a surgical procedure in an operating room in accordance with at least one aspect of the present disclosure.
图3为根据本公开的至少一个方面的与可视化系统、机器人系统和智能器械配对的外科集线器。3 is a surgical hub paired with a visualization system, a robotic system, and a smart instrument in accordance with at least one aspect of the present disclosure.
图4为根据本公开的至少一个方面的外科集线器壳体和能够可滑动地接纳在外科集线器壳体的抽屉中的组合发生器模块的局部透视图。4 is a partial perspective view of a surgical hub housing and a combined generator module slidably received in a drawer of the surgical hub housing in accordance with at least one aspect of the present disclosure.
图5为根据本公开的至少一个方面的具有双极、超声和单极触点以及排烟部件的组合发生器模块的透视图。5 is a perspective view of a combined generator module having bipolar, ultrasonic and monopolar contacts and a fume extraction component in accordance with at least one aspect of the present disclosure.
图6示出了根据本公开的至少一个方面的用于横向模块化外壳的多个横向对接端口的单个电力总线附接件,该横向模块化外壳被配置成能够接纳多个模块。6 illustrates a single power bus attachment for multiple lateral docking ports of a lateral modular enclosure configured to receive multiple modules in accordance with at least one aspect of the present disclosure.
图7示出了根据本公开的至少一个方面的被配置成能够接纳多个模块的竖直模块化外壳。7 illustrates a vertical modular enclosure configured to receive multiple modules in accordance with at least one aspect of the present disclosure.
图8示出了根据本公开的至少一个方面的包括模块化通信集线器的外科数据网络,该模块化通信集线器被配置成能够将位于医疗设施的一个或多个手术室中的模块化装置或专用于外科操作的医疗设施中的任何房间连接到云。8 illustrates a surgical data network including a modular communication hub configured to enable modular devices or dedicated Connect to the cloud from any room in a medical facility where surgical operations are performed.
图9为根据本公开的至少一个方面的计算机实现的交互式外科系统。9 is a computer-implemented interactive surgical system in accordance with at least one aspect of the present disclosure.
图10示出了根据本公开的至少一个方面的包括耦合到模块化控制塔的多个模块的外科集线器。10 illustrates a surgical hub including a plurality of modules coupled to a modular control tower in accordance with at least one aspect of the present disclosure.
图11示出了根据本公开的至少一个方面的通用串行总线(USB)网络集线器装置的一个方面。11 illustrates an aspect of a Universal Serial Bus (USB) hub device in accordance with at least one aspect of the present disclosure.
图12示出了根据本公开的至少一个方面的外科器械或工具的控制系统的逻辑图。12 shows a logic diagram of a control system for a surgical instrument or tool in accordance with at least one aspect of the present disclosure.
图13示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的各个方面的控制电路。13 illustrates a control circuit configured to control various aspects of a surgical instrument or tool in accordance with at least one aspect of the present disclosure.
图14示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的各个方面的组合逻辑电路。14 illustrates a combinational logic circuit configured to control various aspects of a surgical instrument or tool in accordance with at least one aspect of the present disclosure.
图15示出了根据本公开的至少一个方面的被配置成能够控制外科器械或工具的各方面的时序逻辑电路。15 illustrates sequential logic circuitry configured to control various aspects of a surgical instrument or tool in accordance with at least one aspect of the present disclosure.
图16示出了根据本公开的至少一个方面的包括多个马达的外科器械或工具,多个马达可被激活以执行各种功能。16 illustrates a surgical instrument or tool that includes multiple motors that can be activated to perform various functions, according to at least one aspect of the present disclosure.
图17为根据本公开的至少一个方面的被配置成能够操作本文所述的外科工具的机器人外科器械的示意图。17 is a schematic illustration of a robotic surgical instrument configured to operate the surgical tools described herein in accordance with at least one aspect of the present disclosure.
图18示出了根据本公开的至少一个方面的被编程以控制位移构件的远侧平移的外科器械的框图。18 shows a block diagram of a surgical instrument programmed to control distal translation of a displacement member in accordance with at least one aspect of the present disclosure.
图19为根据本公开的至少一个方面的被配置成能够控制各个功能的外科器械的示意图。19 is a schematic illustration of a surgical instrument configured to control various functions in accordance with at least one aspect of the present disclosure.
图20是根据本公开的至少一个方面的被配置成能够除其它益处之外还提供无电感器调谐的发生器的简化框图。20 is a simplified block diagram of a generator configured to provide, among other benefits, inductorless tuning in accordance with at least one aspect of the present disclosure.
图21示出了根据本公开的至少一个方面的作为图20的发生器的一种形式的发生器的示例。21 illustrates an example of a generator that is one form of the generator of FIG. 20 in accordance with at least one aspect of the present disclosure.
图22示出了根据本公开的至少一个方面的电外科系统。22 illustrates an electrosurgical system in accordance with at least one aspect of the present disclosure.
图23示出了根据本公开的至少一个方面的图22的电外科系统的返回垫。23 illustrates a return pad of the electrosurgical system of FIG. 22 in accordance with at least one aspect of the present disclosure.
图24示出了根据本公开的至少一个方面的图23的返回垫的多个电极。24 illustrates a plurality of electrodes of the return pad of FIG. 23 in accordance with at least one aspect of the present disclosure.
图25示出了根据本公开的至少一个方面的图23的返回垫的感测装置的阵列。25 illustrates an array of sensing devices of the return pad of FIG. 23 in accordance with at least one aspect of the present disclosure.
图26示出了根据本公开的至少一个方面的用于同时向患者施加神经刺激信号和电外科能量的方法。26 illustrates a method for simultaneously applying a nerve stimulation signal and electrosurgical energy to a patient in accordance with at least one aspect of the present disclosure.
具体实施方式Detailed ways
本专利申请的申请人拥有于2018年6月29日提交的以下美国专利申请,这些专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of this patent application has the following US patent applications filed on June 29, 2018, the disclosures of each of these patent applications are incorporated herein by reference in their entirety:
·标题为“CONTROLLING A SURGICAL INSTRUMENT ACCORDING TO SENSEDCLOSURE PARAMETERS”(代理人案卷号END8543USNP/170760)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "CONTROLLING A SURGICAL INSTRUMENT ACCORDING TO SENSEDCLOSURE PARAMETERS" (Attorney Docket No. END8543USNP/170760);
·标题为“SYSTEMS FOR ADJUSTING END EFFECTOR PARAMETERS BASED ONPERIOPERATIVE INFORMATION”(代理人案卷号END8543USNP1/170760-1)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SYSTEMS FOR ADJUSTING END EFFECTOR PARAMETERS BASED ONPERIOPERATIVE INFORMATION" (Attorney Docket No. END8543USNP1/170760-1);
·标题为“SAFETY SYSTEMS FOR SMART POWERED SURGICAL STAPLING”(代理人案卷号END8543USNP2/170760-2)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SAFETY SYSTEMS FOR SMART POWERED SURGICAL STAPLING" (Attorney Docket No. END8543USNP2/170760-2);
·标题为“SAFETY SYSTEMS FOR SMART POWERED SURGICAL STAPLING”(代理人案卷号END8543USNP3/170760-3)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SAFETY SYSTEMS FOR SMART POWERED SURGICAL STAPLING" (Attorney Docket No. END8543USNP3/170760-3);
·标题为“SURGICAL SYSTEMS FOR DETECTING END EFFECTOR TISSUEDISTRIBUTION IRREGULARITIES”(代理人案卷号END8543USNP4/170760-4)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL SYSTEMS FOR DETECTING END EFFECTOR TISSUEDISTRIBUTION IRREGULARITIES" (Attorney Docket No. END8543USNP4/170760-4);
·标题为“SYSTEMS FOR DETECTING PROXIMITY OF SURGICAL END EFFECTOR TOCANCEROUS TISSUE”(代理人案卷号END8543USNP5/170760-5)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SYSTEMS FOR DETECTING PROXIMITY OF SURGICAL END EFFECTOR TOCANCEROUS TISSUE" (Attorney Docket No. END8543USNP5/170760-5);
·标题为“SURGICAL INSTRUMENT CARTRIDGE SENSOR ASSEMBLIES”(代理人案卷号END8543USNP6/170760-6)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL INSTRUMENT CARTRIDGE SENSOR ASSEMBLIES" (Attorney Docket No. END8543USNP6/170760-6);
·标题为“VARIABLE OUTPUT CARTRIDGE SENSOR ASSEMBLY”(代理人案卷号END8543USNP7/170760-7)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "VARIABLE OUTPUT CARTRIDGE SENSOR ASSEMBLY" (Attorney Docket No. END8543USNP7/170760-7);
·标题为“SURGICAL INSTRUMENT HAVING A FLEXIBLE ELECTRODE”(代理人案卷号END8544USNP/170761)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SURGICAL INSTRUMENT HAVING A FLEXIBLE ELECTRODE" (Attorney Docket No. END8544USNP/170761);
·标题为“SURGICAL INSTRUMENT HAVING A FLEXIBLE CIRCUIT”(代理人案卷号END8544USNP1/170761-1)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SURGICAL INSTRUMENT HAVING A FLEXIBLE CIRCUIT" (Attorney Docket No. END8544USNP1/170761-1);
·标题为“SURGICAL INSTRUMENT WITH A TISSUE MARKING ASSEMBLY”(代理人案卷号END8544USNP2/170761-2)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL INSTRUMENT WITH A TISSUE MARKING ASSEMBLY" (Attorney Docket No. END8544USNP2/170761-2);
·标题为“SURGICAL SYSTEMS WITH PRIORITIZED DATA TRANSMISSIONCAPABILITIES”(代理人案卷号END8544USNP3/170761-3)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL SYSTEMS WITH PRIORITIZED DATA TRANSMISSIONCAPABILITIES" (Attorney Docket No. END8544USNP3/170761-3);
·标题为“SURGICAL EVACUATION SENSING AND MOTOR CONTROL”(代理人案卷号END8545USNP/170762)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SURGICAL EVACUATION SENSING AND MOTOR CONTROL" (Attorney Docket No. END8545USNP/170762);
·标题为“SURGICAL EVACUATION SENSOR ARRANGEMENTS”(代理人案卷号END8545USNP1/170762-1)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL EVACUATION SENSOR ARRANGEMENTS" (Attorney Docket No. END8545USNP1/170762-1);
·标题为“SURGICAL EVACUATION FLOW PATHS”(代理人案卷号END8545USNP2/170762-2)的美国专利申请序列号__________;· United States Patent Application Serial No. __________ entitled "SURGICAL EVACUATION FLOW PATHS" (Attorney Docket No. END8545USNP2/170762-2);
·标题为“SURGICAL EVACUATION SENSING AND GENERATOR CONTROL”(代理人案卷号END8545USNP3/170762-3)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL EVACUATION SENSING AND GENERATOR CONTROL" (Attorney Docket No. END8545USNP3/170762-3);
·标题为“SURGICAL EVACUATION SENSING AND DISPLAY”(代理人案卷号END8545USNP4/170762-4)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SURGICAL EVACUATION SENSING AND DISPLAY" (Attorney Docket No. END8545USNP4/170762-4);
·标题为“COMMUNICATION OF SMOKE EVACUATION SYSTEM PARAMETERS TO HUBOR CLOUD IN SMOKE EVACUATION MODULE FOR INTERACTIVE SURGICAL PLATFORM”(代理人案卷号END8546USNP/170763)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "COMMUNICATION OF SMOKE EVACUATION SYSTEM PARAMETERS TO HUBOR CLOUD IN SMOKE EVACUATION MODULE FOR INTERACTIVE SURGICAL PLATFORM" (Attorney Docket No. END8546USNP/170763);
·标题为“SMOKE EVACUATION SYSTEM INCLUDING A SEGMENTED CONTROLCIRCUIT FOR INTERACTIVE SURGICAL PLATFORM”(代理人案卷号END8546USNP1/170763-1)的美国专利申请序列号__________;U.S. Patent Application Serial No. __________ entitled "SMOKE EVACUATION SYSTEM INCLUDING A SEGMENTED CONTROLCIRCUIT FOR INTERACTIVE SURGICAL PLATFORM" (Attorney Docket No. END8546USNP1/170763-1);
·标题为“SURGICAL EVACUATION SYSTEM WITH A COMMUNICATION CIRCUIT FORCOMMUNICATION BETWEEN A FILTER AND A SMOKE EVACUATION DEVICE”(代理人案卷号END8547USNP/170764)的美国专利申请序列号__________;以及U.S. Patent Application Serial No. __________ entitled "SURGICAL EVACUATION SYSTEM WITH A COMMUNICATION CIRCUIT FORCOMMUNICATION BETWEEN A FILTER AND A SMOKE EVACUATION DEVICE" (Attorney Docket No. END8547USNP/170764); and
·标题为“DUAL IN-SERIES LARGE AND SMALL DROPLET FILTERS”(代理人案卷号END8548USNP/170765)的美国专利申请序列号__________。US Patent Application Serial No. __________ entitled "DUAL IN-SERIES LARGE AND SMALL DROPLET FILTERS" (Attorney Docket No. END8548USNP/170765).
本专利申请的申请人拥有于2018年6月28日提交的以下美国临时专利申请,这些临时专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of the present patent application has the following US provisional patent applications filed on June 28, 2018, the disclosures of each of these provisional patent applications are incorporated herein by reference in their entirety:
·美国临时专利申请序列号62/691,228,其标题为“A Method of usingreinforced flex circuits with multiple sensors with electrosurgical devices”;U.S. Provisional Patent Application Serial No. 62/691,228, entitled "A Method of using reinforced flex circuits with multiple sensors with electrosurgical devices";
·美国临时专利申请序列号62/691,227,其标题为“controlling a surgicalinstrument according to sensed closure parameters”;U.S. Provisional Patent Application Serial No. 62/691,227, entitled "controlling a surgical instrument according to sensed closure parameters";
·标题为“SURGICAL INSTRUMENT HAVING A FLEXIBLE ELECTRODE”的美国临时专利申请序列号62/691,230;U.S. Provisional Patent Application Serial No. 62/691,230 entitled "SURGICAL INSTRUMENT HAVING A FLEXIBLE ELECTRODE";
·标题为“SURGICAL EVACUATION SENSING AND MOTOR CONTROL”的美国临时专利申请序列号62/691,219;U.S. Provisional Patent Application Serial No. 62/691,219 entitled "SURGICAL EVACUATION SENSING AND MOTOR CONTROL";
·标题为“COMMUNICATION OF SMOKE EVACUATION SYSTEM PARAMETERS TO HUBOR CLOUD IN SMOKE EVACUATION MODULE FOR INTERACTIVE SURGICAL PLATFORM”的美国临时专利申请序列号62/691,257;U.S. Provisional Patent Application Serial No. 62/691,257 entitled "COMMUNICATION OF SMOKE EVACUATION SYSTEM PARAMETERS TO HUBOR CLOUD IN SMOKE EVACUATION MODULE FOR INTERACTIVE SURGICAL PLATFORM";
·美国临时专利申请序列号62/691,262,其标题为“SURGICAL EVACUATIONSYSTEM WITH A COMMUNICATION CIRCUIT FOR COMMUNICATION BETWEEN A FILTER AND ASMOKE EVACUATION DEVICE”;以及U.S. Provisional Patent Application Serial No. 62/691,262, entitled "SURGICAL EVACUATIONSYSTEM WITH A COMMUNICATION CIRCUIT FOR COMMUNICATION BETWEEN A FILTER AND ASMOKE EVACUATION DEVICE"; and
·标题为“DUAL IN-SERIES LARGE AND SMALL DROPLET FILTERS”的美国临时专利申请序列号62/691,251。- US Provisional Patent Application Serial No. 62/691,251 entitled "DUAL IN-SERIES LARGE AND SMALL DROPLET FILTERS".
本专利申请的申请人拥有于2018年4月19日提交的以下美国临时专利申请,这些临时专利申请的公开内容全文以引用方式并入本文:The applicant of this patent application has the following U.S. Provisional Patent Applications filed on April 19, 2018, the disclosures of which are incorporated herein by reference in their entirety:
·标题为“METHOD OF HUB COMMUNICATION”的美国临时专利申请序列号62/659,900。- US Provisional Patent Application Serial No. 62/659,900 entitled "METHOD OF HUB COMMUNICATION".
本专利申请的申请人拥有于2018年3月29日提交的以下美国专利申请,这些专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of this patent application has the following US patent applications filed on March 29, 2018, the disclosures of each of these patent applications are hereby incorporated by reference in their entirety:
·标题为“INTERACTIVE SURGICAL SYSTEMS WITH ENCRYPTED COMMUNICATIONCAPABILITIES”的美国专利申请序列号15/940,641;U.S. Patent Application Serial No. 15/940,641 entitled "INTERACTIVE SURGICAL SYSTEMS WITH ENCRYPTED COMMUNICATION CAPABILITIES";
·标题为“INTERACTIVE SURGICAL SYSTEMS WITH CONDITION HANDLING OFDEVICES AND DATA CAPABILITIES”的美国专利申请序列号15/940,648;U.S. Patent Application Serial No. 15/940,648 entitled "INTERACTIVE SURGICAL SYSTEMS WITH CONDITION HANDLING OFDEVICES AND DATA CAPABILITIES";
·标题为“SURGICAL HUB COORDINATION OF CONTROL AND COMMUNICATION OFOPERATING ROOM DEVICES”的美国专利申请序列号15/940,656;U.S. Patent Application Serial No. 15/940,656 entitled "SURGICAL HUB COORDINATION OF CONTROL AND COMMUNICATION OFOPERATING ROOM DEVICES";
·标题为“SPATIAL AWARENESS OF SURGICAL HUBS IN OPERATING ROOMS”的美国专利申请序列号15/940,666;U.S. Patent Application Serial No. 15/940,666 entitled "SPATIAL AWARENESS OF SURGICAL HUBS IN OPERATING ROOMS";
·标题为“COOPERATIVE UTILIZATION OF DATA DERIVED FROM SECONDARYSOURCES BY INTELLIGENT SURGICAL HUBS”的美国专利申请序列号15/940,670;U.S. Patent Application Serial No. 15/940,670 entitled "COOPERATIVE UTILIZATION OF DATA DERIVED FROM SECONDARYSOURCES BY INTELLIGENT SURGICAL HUBS";
·标题为“SURGICAL HUB CONTROL ARRANGEMENTS”的美国专利申请序列号15/940,677;U.S. Patent Application Serial No. 15/940,677 entitled "SURGICAL HUB CONTROL ARRANGEMENTS";
·标题为“DATA STRIPPING METHOD TO INTERROGATE PATIENT RECORDS ANDCREATE ANONYMIZED RECORD”的美国专利申请序列号15/940,632;U.S. Patent Application Serial No. 15/940,632 entitled "DATA STRIPPING METHOD TO INTERROGATE PATIENT RECORDS ANDCREATE ANONYMIZED RECORD";
·标题为“COMMUNICATION HUB AND STORAGE DEVICE FOR STORING PARAMETERSAND STATUS OF A SURGICAL DEVICE TO BE SHARED WITH CLOUD BASED ANALYTICSSYSTEMS”的美国专利申请序列号15/940,640;U.S. Patent Application Serial No. 15/940,640 entitled "COMMUNICATION HUB AND STORAGE DEVICE FOR STORING PARAMETERSAND STATUS OF A SURGICAL DEVICE TO BE SHARED WITH CLOUD BASED ANALYTICSSYSTEMS";
·标题为“SELF DESCRIBING DATA PACKETS GENERATED AT AN ISSUINGINSTRUMENT”的美国专利申请序列号15/940,645;U.S. Patent Application Serial No. 15/940,645 entitled "SELF DESCRIBING DATA PACKETS GENERATED AT AN ISSUING INSTRUMENT";
·标题为“DATA PAIRING TO INTERCONNECT A DEVICE MEASURED PARAMETERWITH AN OUTCOME”的美国专利申请序列号15/940,649;US Patent Application Serial No. 15/940,649 entitled "DATA PAIRING TO INTERCONNECT A DEVICE MEASURED PARAMETERWITH AN OUTCOME";
·标题为“SURGICAL HUB SITUATIONAL AWARENESS”的美国专利申请序列号15/940,654;U.S. Patent Application Serial No. 15/940,654 entitled "SURGICAL HUB SITUATIONAL AWARENESS";
·标题为“SURGICAL SYSTEM DISTRIBUTED PROCESSING”的美国专利申请序列号15/940,663;U.S. Patent Application Serial No. 15/940,663 entitled "SURGICAL SYSTEM DISTRIBUTED PROCESSING";
·标题为“AGGREGATION AND REPORTING OF SURGICAL HUB DATA”的美国专利申请序列号15/940,668;U.S. Patent Application Serial No. 15/940,668 entitled "AGGREGATION AND REPORTING OF SURGICAL HUB DATA";
·标题为“SURGICAL HUB SPATIAL AWARENESS TO DETERMINE DEVICES INOPERATING THEATER”的美国专利申请序列号15/940,671;U.S. Patent Application Serial No. 15/940,671 entitled "SURGICAL HUB SPATIAL AWARENESS TO DETERMINE DEVICES INOPERATING THEATER";
·标题为“DISPLAY OF ALIGNMENT OF STAPLE CARTRIDGE TO PRIOR LINEARSTAPLE LINE”的美国专利申请序列号15/940,686;U.S. Patent Application Serial No. 15/940,686 entitled "DISPLAY OF ALIGNMENT OF STAPLE CARTRIDGE TO PRIOR LINEARSTAPLE LINE";
·标题为“STERILE FIELD INTERACTIVE CONTROL DISPLAYS”的美国专利申请序列号15/940,700;U.S. Patent Application Serial No. 15/940,700 entitled "STERILE FIELD INTERACTIVE CONTROL DISPLAYS";
·标题为“COMPUTER IMPLEMENTED INTERACTIVE SURGICAL SYSTEMS”的美国专利申请序列号15/940,629;U.S. Patent Application Serial No. 15/940,629 entitled "COMPUTER IMPLEMENTED INTERACTIVE SURGICAL SYSTEMS";
·标题为“USE OF LASER LIGHT AND RED-GREEN-BLUE COLORATION TODETERMINE PROPERTIES OF BACK SCATTERED LIGHT”的美国专利申请序列号15/940,704;U.S. Patent Application Serial No. 15/940,704 entitled "USE OF LASER LIGHT AND RED-GREEN-BLUE COLORATION TODETERMINE PROPERTIES OF BACK SCATTERED LIGHT";
·标题为“CHARACTERIZATION OF TISSUE IRREGULARITIES THROUGH THE USE OFMONO-CHROMATIC LIGHT REFRACTIVITY”的美国专利申请序列号15/940,722;以及U.S. Patent Application Serial No. 15/940,722 entitled "CHARACTERIZATION OF TISSUE IRREGULARITIES THROUGH THE USE OFMONO-CHROMATIC LIGHT REFRACTIVITY"; and
·标题为“DUAL CMOS ARRAY IMAGING”的美国专利申请序列号15/940,742。- US Patent Application Serial No. 15/940,742 entitled "DUAL CMOS ARRAY IMAGING".
本专利申请的申请人拥有于2018年3月29日提交的以下美国专利申请,这些专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of this patent application has the following US patent applications filed on March 29, 2018, the disclosures of each of these patent applications are hereby incorporated by reference in their entirety:
·标题为“ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL DEVICES”的美国专利申请序列号15/940,636;U.S. Patent Application Serial No. 15/940,636 entitled "ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL DEVICES";
·标题为“ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL HUBS”的美国专利申请序列号15/940,653;U.S. Patent Application Serial No. 15/940,653 entitled "ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL HUBS";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR CUSTOMIZATION ANDRECOMMENDATIONS TO A USER”的美国专利申请序列号15/940,660;U.S. Patent Application Serial No. 15/940,660 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR CUSTOMIZATION ANDRECOMMENDATIONS TO A USER";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR LINKING OF LOCAL USAGETRENDS WITH THE RESOURCE ACQUISITION BEHAVIORS OF LARGER DATA SET”的美国专利申请序列号15/940,679;U.S. Patent Application Serial No. 15/940,679 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR LINKING OF LOCAL USAGETRENDS WITH THE RESOURCE ACQUISITION BEHAVIORS OF LARGER DATA SET";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR MEDICAL FACILITY SEGMENTEDINDIVIDUALIZATION OF INSTRUMENT FUNCTION”的美国专利申请序列号15/940,694;U.S. Patent Application Serial No. 15/940,694 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR MEDICAL FACILITY SEGMENTEDINDIVIDUALIZATION OF INSTRUMENT FUNCTION";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR SECURITY ANDAUTHENTICATION TRENDS AND REACTIVE MEASURES”的美国专利申请序列号15/940,634;U.S. Patent Application Serial No. 15/940,634 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR SECURITY ANDAUTHENTICATION TRENDS AND REACTIVE MEASURES";
·标题为“DATA HANDLING AND PRIORITIZATION IN A CLOUD ANALYTICSNETWORK”的美国专利申请序列号15/940,706;以及U.S. Patent Application Serial No. 15/940,706 entitled "DATA HANDLING AND PRIORITIZATION IN A CLOUD ANALYTICSNETWORK"; and
·标题为“CLOUD INTERFACE FOR COUPLED SURGICAL DEVICES”的美国专利申请序列号15/940,675。- US Patent Application Serial No. 15/940,675 entitled "CLOUD INTERFACE FOR COUPLED SURGICAL DEVICES".
本专利申请的申请人拥有于2018年3月29日提交的以下美国专利申请,这些专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of this patent application has the following US patent applications filed on March 29, 2018, the disclosures of each of these patent applications are hereby incorporated by reference in their entirety:
·标题为“DRIVE ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国专利申请序列号15/940,627;U.S. Patent Application Serial No. 15/940,627 entitled "DRIVE ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“COMMUNICATION ARRANGEMENTS FOR ROBOT-ASSISTED SURGICALPLATFORMS”的美国专利申请序列号15/940,637;U.S. Patent Application Serial No. 15/940,637 entitled "COMMUNICATION ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“CONTROLS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国专利申请序列号15/940,642;U.S. Patent Application Serial No. 15/940,642 entitled "CONTROLS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“AUTOMATIC TOOL ADJUSTMENTS FOR ROBOT-ASSISTED SURGICALPLATFORMS”的美国专利申请序列号15/940,676;U.S. Patent Application Serial No. 15/940,676 entitled "AUTOMATIC TOOL ADJUSTMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“CONTROLLERS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国专利申请序列号15/940,680;U.S. Patent Application Serial No. 15/940,680 entitled "CONTROLLERS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“COOPERATIVE SURGICAL ACTIONS FOR ROBOT-ASSISTED SURGICALPLATFORMS”的美国专利申请序列号15/940,683;U.S. Patent Application Serial No. 15/940,683 entitled "COOPERATIVE SURGICAL ACTIONS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“DISPLAY ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国专利申请序列号15/940,690;以及U.S. Patent Application Serial No. 15/940,690 entitled "DISPLAY ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS"; and
·标题为“SENSING ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国专利申请序列号15/940,711。- US Patent Application Serial No. 15/940,711 entitled "SENSING ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS".
本专利申请的申请人拥有于2018年3月28日提交的以下美国临时专利申请,这些临时专利申请中的每个的公开内容全文以引用方式并入本文:The applicant of this patent application has the following US provisional patent applications filed on March 28, 2018, the disclosures of each of these provisional patent applications are incorporated herein by reference in their entirety:
·标题为“INTERACTIVE SURGICAL SYSTEMS WITH ENCRYPTED COMMUNICATIONCAPABILITIES”的美国临时专利申请序列号62/649,302;U.S. Provisional Patent Application Serial No. 62/649,302 entitled "INTERACTIVE SURGICAL SYSTEMS WITH ENCRYPTED COMMUNICATION CAPABILITIES";
·标题为“DATA STRIPPING METHOD TO INTERROGATE PATIENT RECORDS ANDCREATE ANONYMIZED RECORD”的美国临时专利申请序列号62/649,294;U.S. Provisional Patent Application Serial No. 62/649,294 entitled "DATA STRIPPING METHOD TO INTERROGATE PATIENT RECORDS ANDCREATE ANONYMIZED RECORD";
·标题为“SURGICAL HUB SITUATIONAL AWARENESS”的美国临时专利申请序列号62/649,300;U.S. Provisional Patent Application Serial No. 62/649,300 entitled "SURGICAL HUB SITUATIONAL AWARENESS";
·标题为“SURGICAL HUB SPATIAL AWARENESS TO DETERMINE DEVICES INOPERATING THEATER”的美国临时专利申请序列号62/649,309;U.S. Provisional Patent Application Serial No. 62/649,309 entitled "SURGICAL HUB SPATIAL AWARENESS TO DETERMINE DEVICES INOPERATING THEATER";
·标题为“COMPUTER IMPLEMENTED INTERACTIVE SURGICAL SYSTEMS”的美国临时专利申请序列号62/649,310;U.S. Provisional Patent Application Serial No. 62/649,310 entitled "COMPUTER IMPLEMENTED INTERACTIVE SURGICAL SYSTEMS";
·标题为“USE OF LASER LIGHT AND RED-GREEN-BLUE COLORATION TODETERMINE PROPERTIES OF BACK SCATTERED LIGHT”的美国临时专利申请序列号62/649,291;U.S. Provisional Patent Application Serial No. 62/649,291 entitled "USE OF LASER LIGHT AND RED-GREEN-BLUE COLORATION TODETERMINE PROPERTIES OF BACK SCATTERED LIGHT";
·标题为“ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL DEVICES”的美国临时专利申请序列号62/649,296;U.S. Provisional Patent Application Serial No. 62/649,296 entitled "ADAPTIVE CONTROL PROGRAM UPDATES FOR SURGICAL DEVICES";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR CUSTOMIZATION ANDRECOMMENDATIONS TO A USER”的美国临时专利申请序列号62/649,333;U.S. Provisional Patent Application Serial No. 62/649,333 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR CUSTOMIZATION ANDRECOMMENDATIONS TO A USER";
·标题为“CLOUD-BASED MEDICAL ANALYTICS FOR SECURITY ANDAUTHENTICATION TRENDS AND REACTIVE MEASURES”的美国临时专利申请序列号62/649,327;U.S. Provisional Patent Application Serial No. 62/649,327 entitled "CLOUD-BASED MEDICAL ANALYTICS FOR SECURITY ANDAUTHENTICATION TRENDS AND REACTIVE MEASURES";
·标题为“DATA HANDLING AND PRIORITIZATION IN A CLOUD ANALYTICSNETWORK”的美国临时专利申请序列号62/649,315;U.S. Provisional Patent Application Serial No. 62/649,315, entitled "DATA HANDLING AND PRIORITIZATION IN A CLOUD ANALYTICSNETWORK";
·标题为“CLOUD INTERFACE FOR COUPLED SURGICAL DEVICES”的美国临时专利申请序列号62/649,313;U.S. Provisional Patent Application Serial No. 62/649,313 entitled "CLOUD INTERFACE FOR COUPLED SURGICAL DEVICES";
·标题为“DRIVE ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国临时专利申请序列号62/649,320;U.S. Provisional Patent Application Serial No. 62/649,320 entitled "DRIVE ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS";
·标题为“AUTOMATIC TOOL ADJUSTMENTS FOR ROBOT-ASSISTED SURGICALPLATFORMS”的美国临时专利申请序列号62/649,307;以及U.S. Provisional Patent Application Serial No. 62/649,307 entitled "AUTOMATIC TOOL ADJUSTMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS"; and
·标题为“SENSING ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS”的美国临时专利申请序列号62/649,323。- US Provisional Patent Application Serial No. 62/649,323 entitled "SENSING ARRANGEMENTS FOR ROBOT-ASSISTED SURGICAL PLATFORMS".
应当理解,为清楚理解本发明,本发明的附图和说明中的至少一些已经简化以示出相关的元件,同时为清楚起见,除去本领域普通技术人员将了解到也可构成本发明的一部分的其它元件。然而,由于此类元件为本领域所熟知的并且由于它们不利于较好地理解本发明,因此本文未提供对此类元件的说明。It should be understood that at least some of the drawings and descriptions of the present invention have been simplified to show relevant elements for a clear understanding of the invention, and also form part of the invention except as would be understood by those of ordinary skill in the art for the sake of clarity of other components. However, since such elements are well known in the art and since they do not facilitate a better understanding of the present invention, no description of such elements is provided herein.
在以下详细说明中,参考构成其一部分的附图。在附图中,除非上下文另外指出,否则类似的符号和参考字符通常在几个视图中识别类似的部件。详细说明、附图和权利要求书中所述的例示性方面并非旨在为限制性的。可利用其它方面,并且可做出其它改变,此并不脱离本文所述的技术的范围。In the following detailed description, reference is made to the accompanying drawings which form a part hereof. In the drawings, similar symbols and reference characters typically identify similar parts throughout the several views, unless context dictates otherwise. The illustrative aspects described in the detailed description, drawings, and claims are not intended to be limiting. Other aspects may be utilized, and other changes may be made, without departing from the scope of the technology described herein.
下面对本技术的某些示例的说明不应用于限制本技术的范围。从下面的描述而言,本技术的其它示例、特征、方面、实施方案和优点对于本领域的技术人员而言将变得显而易见,下面的描述以举例的方式进行,这是为实现本技术所设想的最好的方式中的一种方式。正如将意识到的,本文所述的技术能够具有其它不同的和明显的方面,所有这些方面均不脱离本技术。因此,附图和说明应被视为实质上是例示性的而非限制性的。The following description of some examples of the present technology should not be used to limit the scope of the present technology. Other examples, features, aspects, embodiments, and advantages of the present technology will become apparent to those skilled in the art from the following description, which is by way of example, as necessary for implementing the present technology. One of the best ways to imagine. As will be realized, the technology described herein is capable of other different and obvious aspects, all without departing from the present technology. Accordingly, the drawings and description are to be regarded as illustrative in nature and not restrictive.
还应当理解,本文所述的教导内容、表达、方面、实施方案、示例等中的任何一者或多者可与本文所述的其它教导内容、表达、方面、实施方案、示例等中的任何一者或多者组合。因此,下述教导内容、表达、方面、实施方案、示例等不应视为彼此孤立。参考本文的教导内容,本文的教导内容可进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。此类修改和变型旨在包括在权利要求书的范围内。It is also to be understood that any one or more of the teachings, expressions, aspects, embodiments, examples, etc. described herein may be combined with any of the other teachings, expressions, aspects, embodiments, examples, etc. described herein one or more in combination. Accordingly, the following teachings, expressions, aspects, embodiments, examples, etc. should not be considered in isolation from each other. Various suitable ways in which the teachings herein may be combined will be apparent to those of ordinary skill in the art in view of the teachings herein. Such modifications and variations are intended to be included within the scope of the claims.
在详细解释电外科系统、返回垫和方法的各个方面之前,应当指出的是,本文公开的各个方面在其应用或使用上不限于附图和说明中所示的部件的构造和布置的细节。相反,所公开的方面可以设置或结合在它们的其它方面、实施方案、变型和修改中,并可以各种方式实践或执行。因此,本文所公开的电外科系统、返回垫和方法的各方面在本质上是例示性的,并且不旨在限制其范围或应用。此外,除非另外指明,否则本文所采用的术语和表达是为了方便读者而针对各方面进行描述的目的而选,并且不旨在限制其范围。此外,还应当理解,所公开的方面、方面的表达和/或其示例中的任何一者或多者可非限制地与其它所公开的方面、方面的表达和/或其示例中的任何一者或多者组合。Before explaining various aspects of the electrosurgical system, return pad, and method in detail, it should be noted that the various aspects disclosed herein are not limited in their application or use to the details of construction and arrangement of components shown in the drawings and description. Rather, the disclosed aspects may be arranged or incorporated in other aspects, embodiments, variations and modifications thereof and may be practiced or carried out in various ways. Accordingly, aspects of the electrosurgical systems, return pads, and methods disclosed herein are exemplary in nature and are not intended to limit their scope or applicability. Furthermore, unless otherwise indicated, the terminology and expressions employed herein have been chosen for the purpose of describing the various aspects for the convenience of the reader and are not intended to limit the scope thereof. Furthermore, it is also to be understood that any one or more of the disclosed aspects, expressions of aspects and/or examples thereof may be combined without limitation with any one of the other disclosed aspects, expressions of aspects and/or examples thereof or a combination of them.
而且,在以下说明中,应当理解,诸如向内、向外、向上、向下、之上、之下、左、右、内部、外部等的术语是方便的言语,并且不应当理解为限制性术语。本文所用的术语并非意在限制在本文所述装置或其部分的范围内,而是可以按照其它取向附接或利用。将参照附图更详细地描述各个方面。Moreover, in the following description, it should be understood that terms such as inward, outward, upward, downward, above, below, left, right, inner, outer, etc. are words of convenience and should not be construed as limiting the term. The terminology used herein is not intended to be limited in scope to the devices or portions thereof described herein, but may be attached or utilized in other orientations. Various aspects will be described in more detail with reference to the accompanying drawings.
如下文更详细地描述的,本发明的各方面可通过计算装置和/或存储在计算机可读介质上的计算机程序来实现。计算机可读介质可包括磁盘、装置和/或传播信号。As described in more detail below, aspects of the present invention may be implemented by a computing device and/or a computer program stored on a computer-readable medium. Computer-readable media may include disks, devices, and/or propagated signals.
参见图1,计算机实现的交互式外科系统100包括一个或多个外科系统102和基于云的系统(例如,可包括耦合到存储装置105的远程服务器113的云104)。每个外科系统102包括与可包括远程服务器113的云104通信的至少一个外科集线器106。在一个示例中,如图1中所示,外科系统102包括可视化系统108、机器人系统110和手持式智能外科器械112,其被配置成能够彼此通信并且/或者与外科集线器106通信。在一些方面,外科系统102可包括M数量的集线器106、N数量的可视化系统108、O数量的机器人系统110和P数量的手持式智能外科器械112,其中M、N、O和P为大于或等于一的整数。1, a computer-implemented interactive
图3示出了用于对平躺在外科手术室116中的手术台114上的患者执行外科规程的外科系统102的示例。机器人系统110在外科规程中用作外科系统102的一部分。机器人系统110包括外科医生的控制台118、患者侧推车120(外科机器人)和外科机器人集线器122。当外科医生通过外科医生的控制台118观察外科部位时,患者侧推车120可通过患者体内的微创切口来操纵至少一个可移除地联接的外科工具117。外科部位的图像可通过医疗成像装置124获得,该医疗成像装置可由患者侧推车120操纵以定向成像装置124。机器人集线器122可用于处理外科部位的图像,以随后通过外科医生的控制台118显示给外科医生。FIG. 3 shows an example of a
其它类型的机器人系统可容易地适于与外科系统102一起使用。适用于本公开的机器人系统和外科工具的各种示例在2017年12月28日提交的标题为机器人辅助的外科平台(ROBOT ASSISTED SURGICAL PLATFORM)的美国临时专利申请序列号62/611,339中有所描述,该临时专利申请的公开内容全文以引用方式并入本文。Other types of robotic systems may be readily adapted for use with
由云104执行并且适用于本公开的基于云的分析的各种示例描述于2017年12月28日提交的标题为“基于云的医疗分析(CLOUD-BASED MEDICAL ANALYTICS)”的美国临时专利申请序列号62/611,340中,该临时专利申请的公开内容全文以引用方式并入本文。Various examples of cloud-based analytics performed by the
在各种方面,成像装置124包括至少一个图像传感器和一个或多个光学部件。合适的图像传感器包括但不限于电荷耦合器件(CCD)传感器和互补金属氧化物半导体(CMOS)传感器。In various aspects,
成像装置124的光学部件可包括一个或多个照明源和/或一个或多个透镜。一个或多个照明源可被引导以照明外科场地的多部分。一个或多个图像传感器可接收从外科场地反射或折射的光,包括从组织和/或外科器械反射或折射的光。Optical components of
一个或多个照明源可被配置成能够辐射可见光谱中的电磁能以及不可见光谱。可见光谱(有时被称为光学光谱或发光光谱)是电磁光谱中对人眼可见(即,可被其检测)的那部分,并且可被称为可见光或简单光。典型的人眼将对空气中约380nm至约750nm的波长作出响应。One or more illumination sources may be configured to radiate electromagnetic energy in the visible spectrum as well as the invisible spectrum. The visible spectrum (sometimes referred to as the optical or luminescence spectrum) is that portion of the electromagnetic spectrum that is visible to (ie, detectable by) the human eye, and may be referred to as visible light or simply light. A typical human eye will respond to wavelengths in air from about 380 nm to about 750 nm.
不可见光谱(即,非发光光谱)是电磁光谱的位于可见光谱之下和之上的部分(即,低于约380nm且高于约750nm的波长)。人眼不可检测到不可见光谱。大于约750nm的波长长于红色可见光谱,并且它们变为不可见的红外(IR)、微波和无线电电磁辐射。小于约380nm的波长比紫色光谱短,并且它们变为不可见的紫外、x射线和γ射线电磁辐射。The invisible spectrum (ie, the non-luminescent spectrum) is the portion of the electromagnetic spectrum that lies below and above the visible spectrum (ie, wavelengths below about 380 nm and above about 750 nm). The invisible spectrum is not detectable by the human eye. Wavelengths greater than about 750 nm are longer than the red visible spectrum, and they become invisible infrared (IR), microwave and radio electromagnetic radiation. Wavelengths less than about 380 nm are shorter than the violet spectrum, and they become invisible ultraviolet, x-ray and gamma-ray electromagnetic radiation.
在各种方面,成像装置124被配置用于微创规程中。适用于本公开的成像装置的示例包括但不限于关节镜、血管镜、支气管镜、胆道镜、结肠镜、细胞检查镜、十二指镜、肠窥镜、食道-十二指肠镜(胃镜)、内窥镜、喉镜、鼻咽-肾内窥镜、乙状结肠镜、胸腔镜和子宫内窥镜。In various aspects, the
在一个方面,成像装置采用多光谱监测来辨别形貌和底层结构。多光谱图像是捕集跨电磁波谱的特定波长范围内的图像数据的图像。可通过滤波器或通过使用对特定波长敏感的器械来分离波长,特定波长包括来自可见光范围之外的频率的光,例如IR和紫外。光谱成像可允许提取人眼未能用其红色,绿色和蓝色的受体捕集的附加信息。多光谱成像的使用在2017年12月28日提交的标题为“交互式外科平台(INTERACTIVE SURGICALPLATFORM)”的美国临时专利申请序列号62/611,341的标题“高级成像采集模块(AdvancedImaging Acquisition Module)”下更详细地描述,该临时专利申请的公开内容全文以引用方式并入本文。在完成外科任务以对处理过的组织执行一个或多个先前所述测试之后,多光谱监测可以是用于重新定位外科场地的有用工具。In one aspect, the imaging device employs multispectral monitoring to discern topography and underlying structure. A multispectral image is an image that captures image data across a specific wavelength range of the electromagnetic spectrum. The wavelengths can be separated by filters or by using instruments that are sensitive to specific wavelengths, including light from frequencies outside the visible range, such as IR and UV. Spectral imaging may allow extracting additional information that the human eye fails to capture with its red, green and blue receptors. Use of Multispectral Imaging under the title "Advanced Imaging Acquisition Module" in U.S. Provisional Patent Application Serial No. 62/611,341, filed December 28, 2017, entitled "INTERACTIVE SURGICAL PLATFORM" Described in more detail, the disclosure of this provisional patent application is incorporated herein by reference in its entirety. Multispectral monitoring can be a useful tool for repositioning the surgical field after completing a surgical task to perform one or more of the previously described tests on the treated tissue.
不言自明的是,在任何外科期间都需要对手术室和外科设备进行严格消毒。在“外科室”(即,手术室或治疗室)中所需的严格的卫生和消毒条件需要所有医疗装置和设备的最高可能的无菌性。该灭菌过程的一部分是需要对接触患者或穿透无菌场的任何物质进行灭菌,包括成像装置124及其附接件和部件。应当理解,无菌场可被认为是被认为不含微生物的指定区域,诸如在托盘内或无菌毛巾内,或者无菌场可被认为是已准备用于外科规程的患者周围的区域。无菌场可包括被恰当地穿着的擦洗的团队构件,以及该区域中的所有家具和固定件。It goes without saying that strict sterilization of operating rooms and surgical equipment is required during any surgical procedure. The stringent hygiene and sterilization conditions required in the "surgical room" (ie, operating room or treatment room) require the highest possible sterility of all medical devices and equipment. Part of this sterilization process is the need to sterilize anything that comes into contact with the patient or penetrates the sterile field, including the
在各种方面,可视化系统108包括一个或多个成像传感器、一个或多个图像处理单元、一个或多个存储阵列、以及一个或多个显示器,其相对于无菌场进行策略布置,如图2中所示。在一个方面,可视化系统108包括用于HL7、PACS和EMR的界面。可视化系统108的各种部件在2017年12月28日提交的标题为“交互式外科平台(INTERACTIVE SURGICALPLATFORM)”的美国临时专利申请序列号62/611,341的标题“高级成像采集模块(AdvancedImaging Acquisition Module)”下有所描述,该临时专利申请的公开内容全文以引用方式并入本文。In various aspects,
如图2中所示,主显示器119被定位在无菌场中,以对在手术台114处的操作者可见。此外,可视化塔111被定位在无菌场之外。可视化塔111包括彼此背离的第一非无菌显示器107和第二非无菌显示器109。由外科集线器106引导的可视化系统108被配置成能够利用显示器107、109和119来将信息流协调到无菌场内侧和外侧的操作者。例如,外科集线器106可使成像系统108在非无菌显示器107或109上显示由成像装置124记录的外科部位的快照,同时保持外科部位在主显示器119上的实时馈送。非无菌显示器107或109上的快照可允许非无菌操作者例如执行与外科规程相关的诊断步骤。As shown in FIG. 2 , the
在一个方面,外科集线器106还被配置成能够将由非无菌操作者在可视化塔111处输入的诊断输入或反馈路由至无菌场内的主显示器119,其中可由手术台处的无菌操作者观察到该诊断输入或反馈。在一个示例中,输入可以是对在非无菌显示器107或109上显示的快照的修改形式,其可通过外科集线器106路由到主显示器119。In one aspect, the
参见图2,外科器械112作为外科系统102的一部分在外科规程中使用。外科集线器106还被配置成能够将信息流协调到外科器械112的显示器。例如,参见2017年12月28日提交的标题为交互式外科平台(INTERACTIVE SURGICAL PLATFORM)的美国临时专利申请序列号62/611,341,该临时专利申请的公开内容全文以引用方式并入本文。由非无菌操作者在可视化塔111处输入的诊断输入或反馈可由外科集线器106路由至无菌场内的外科器械显示器115,其中可由外科器械112的操作者观察到该诊断输入或反馈。适用于外科系统102的示例性外科器械描述于2017年12月28日提交的标题为“交互式外科平台(INTERACTIVESURGICAL PLATFORM)”的美国临时专利申请序列号62/611,341的标题“外科器械硬件(Surgical Instrument Hardware)”下,该临时专利申请的公开内容例如全文以引用方式并入本文。Referring to FIG. 2 ,
现在参见图3,外科集线器106被描绘为与可视化系统108、机器人系统110和手持式智能外科器械112通信。外科集线器106包括外科集线器显示器135、成像模块138、发生器模块140、通信模块130、处理器模块132和存储阵列134。在某些方面,如图3中所示,外科集线器106还包括排烟模块126和/或抽吸/冲洗模块128。Referring now to FIG. 3 ,
在外科规程期间,用于密封和/或切割的对组织的能量施加通常与排烟、抽吸过量流体和/或冲洗组织相关。来自不同来源的流体管线、功率管线和/或数据管线通常在外科规程期间缠结。在外科规程期间解决该问题可丢失有价值的时间。断开管线可需要将管线与其相应的模块断开连接,这可需要重置模块。外科集线器模块化壳体136提供用于管理功率管线、数据管线和流体管线的统一环境,这降低了此类管线之间缠结的频率。During surgical procedures, the application of energy to tissue for sealing and/or cutting is often associated with evacuation, aspiration of excess fluid, and/or irrigation of tissue. Fluid, power, and/or data lines from different sources often become tangled during surgical procedures. Valuable time can be lost addressing this issue during the surgical procedure. Disconnecting a line may require disconnecting the line from its corresponding module, which may require resetting the module. The surgical hub
本公开的各方面提供了用于外科规程的外科集线器,该外科规程涉及将能量施加到外科部位处的组织。外科集线器包括外科集线器壳体和可滑动地接纳在外科集线器壳体的对接底座中的组合发生器模块。对接底座包括数据触点和功率触点。组合发生器模块包括座置在单个单元中的超声能量发生器部件、双极RF能量发生器部件和单极RF能量发生器部件中的两个或更多个。在一个方面,组合发生器模块还包括排烟部件,用于将组合发生器模块连接到外科器械的至少一根能量递送缆线、被配置成能够排出通过向组织施加治疗能量而生成的烟雾、流体和/或颗粒的至少一个排烟部件、以及从远程外科部位延伸至排烟部件的流体管线。Aspects of the present disclosure provide a surgical hub for use in surgical procedures involving the application of energy to tissue at a surgical site. The surgical hub includes a surgical hub housing and a combined generator module slidably received in a docking base of the surgical hub housing. The docking base includes data contacts and power contacts. The combined generator module includes two or more of an ultrasonic energy generator component, a bipolar RF energy generator component, and a monopolar RF energy generator component seated in a single unit. In one aspect, the combination generator module further includes a fume extraction component for connecting the combination generator module to at least one energy delivery cable of a surgical instrument, configured to expel smoke generated by applying therapeutic energy to tissue, At least one fume extraction component for fluids and/or particles, and a fluid line extending from the remote surgical site to the fume extraction component.
在一个方面,流体管线是第一流体管线,并且第二流体管线从远程外科部位延伸至可滑动地接纳在外科集线器壳体中的抽吸和冲洗模块。在一个方面,外科集线器壳体包括流体接口。In one aspect, the fluid line is a first fluid line and the second fluid line extends from the remote surgical site to a suction and irrigation module slidably received in the surgical hub housing. In one aspect, the surgical hub housing includes a fluid interface.
某些外科规程可需要将多于一种能量类型施加到组织。一种能量类型可更有利于切割组织,而另一种不同的能量类型可更有利于密封组织。例如,双极发生器可用于密封组织,而超声发生器可用于切割密封的组织。本公开的各方面提供了一种解决方案,其中外科集线器模块化壳体136被配置成能够容纳不同的发生器,并且有利于它们之间的交互式通信。外科集线器模块化壳体136的优点之一是能够快速地移除和/或更换各种模块。Certain surgical procedures may require the application of more than one type of energy to tissue. One type of energy may be more beneficial for cutting tissue, while a different type of energy may be more beneficial for sealing tissue. For example, a bipolar generator can be used to seal tissue, while an ultrasonic generator can be used to cut the sealed tissue. Aspects of the present disclosure provide a solution in which the surgical hub
本公开的方面提供了在涉及将能量施加到组织的外科规程中使用的模块化外科壳体。模块化外科壳体包括:第一能量发生器模块,该第一能量发生器模块被配置成能够生成用于施加到组织的第一能量;和第一对接底座,该第一对接底座包括第一对接端口,该第一对接端口包括第一数据和功率触点,其中第一能量发生器模块可滑动地移动成与该功率和数据触点电接合,并且其中第一能量发生器模块可滑动地移动出与第一功率和数据触点的电接合。Aspects of the present disclosure provide modular surgical housings for use in surgical procedures involving the application of energy to tissue. The modular surgical housing includes: a first energy generator module configured to generate a first energy for application to tissue; and a first docking base including a first docking base a docking port, the first docking port including first data and power contacts, wherein the first energy generator module is slidably moved into electrical engagement with the power and data contacts, and wherein the first energy generator module is slidably moved Move out of electrical engagement with the first power and data contacts.
对上文进行进一步描述,模块化外科壳体还包括第二能量发生器模块,该第二能量发生器模块被配置成能够生成不同于第一能量的第二能量以用于施加到组织,和第二对接底座,该第二对接底座包括第二对接端口,该第二对接端口包括第二数据和功率触点,其中第二能量发生器模块可滑动地移动成与功率和数据触点电接合,并且其中第二能量发生器可滑动地移动出于第二功率和数据触点的电接触。Further described above, the modular surgical housing further includes a second energy generator module configured to generate a second energy different from the first energy for application to tissue, and A second docking base that includes a second docking port that includes second data and power contacts, wherein the second energy generator module is slidably moved into electrical engagement with the power and data contacts , and wherein the second energy generator is slidably movable out of electrical contact with the second power and data contacts.
此外,模块化外科壳体还包括在第一对接端口和第二对接端口之间的通信总线,其被配置成能够有利于第一能量发生器模块和第二能量发生器模块之间的通信。Additionally, the modular surgical housing also includes a communication bus between the first docking port and the second docking port configured to facilitate communication between the first energy generator module and the second energy generator module.
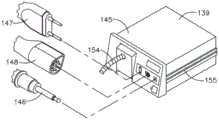
参见图3-7,本公开的各方面被呈现为外科集线器模块化壳体136,其允许发生器模块140、排烟模块126和抽吸/冲洗模块128的模块化集成。外科集线器模块化壳体136还有利于模块140、126、128之间的交互式通信。如图5中所示,发生器模块140可为具有集成的单极部件、双极部件和超声部件的发生器模块,该部件被支撑在可滑动地插入到外科集线器模块化壳体136中的单个外壳单元139中。如图5中所示,发生器模块140可被配置成能够连接到单极装置146、双极装置147和超声装置148。另选地,发生器模块140可包括通过外科集线器模块化壳体136进行交互的一系列单极发生器模块、双极发生器模块和/或超声发生器模块。外科集线器模块化壳体136可被配置成能够有利于多个发生器的插入和对接到外科集线器模块化壳体136中的发生器之间的交互式通信,使得发生器将充当单个发生器。Referring to FIGS. 3-7 , aspects of the present disclosure are presented as a surgical hub
在一个方面,外科集线器模块化壳体136包括具有外部和无线通信接头的模块化功率和通信底板149,以实现模块140、126、128的可移除附接以及它们之间的交互式通信。In one aspect, the surgical hub
在一个方面,外科集线器模块化壳体136包括对接底座或抽屉151(本文也称为抽屉),其被配置成能够可滑动地接纳模块140、126、128。图4示出了能够可滑动地接纳在外科集线器壳体136的对接底座151中的外科集线器壳体136和组合发生器模块145的局部透视图。在组合发生器模块145的背面上具有功率和数据触点的对接端口152被配置成能够当组合发生器模块145滑动到外科集线器模块壳体136的对应的对接底座151内的适当位置时将对应的对接端口150与外科集线器模块化壳体136的对应对接底座151的功率和数据触点接合。在一个方面,组合发生器模块145包括一起集成到单个外壳单元139中的双极、超声和单极模块以及排烟模块,如图5中所示。In one aspect, the surgical hub
在各种方面,排烟模块126包括流体管线154,该流体管线154将捕集/收集的烟雾和/或流体从外科部位传送到例如排烟模块126。源自排烟模块126的真空抽吸可将烟雾吸入外科部位处的公用导管的开口中。耦合到流体管线的公用导管可以是端接在排烟模块126处的柔性管的形式。公用导管和流体管线限定朝向接纳在外科集线器壳体136中的排烟模块126延伸的流体路径。In various aspects, the
在各种方面,抽吸/冲洗模块128耦合到包括吸出流体管线和抽吸流体管线的外科工具。在一个示例中,吸出流体管线和抽吸流体管线为从外科部位朝向抽吸/冲洗模块128延伸的柔性管的形式。一个或多个驱动系统可被配置成能够冲洗到外科部位的流体和从外科部位抽吸流体。In various aspects, the aspiration/
在一个方面,外科工具包括轴,该轴具有在其远侧端部处的端部执行器以及与端部执行器、吸出管和冲洗管相关联的至少一种能量处理。吸出管可在其远侧端部处具有入口,并且吸出管延伸穿过轴。类似地,吸出管可延伸穿过轴并且可具有邻近能量递送工具的入口。能量递送工具被配置成能够将超声能量和/或RF能量递送至外科部位,并且通过初始延伸穿过轴的缆线耦合到发生器模块140。In one aspect, a surgical tool includes a shaft having an end effector at a distal end thereof and at least one energy treatment associated with the end effector, aspiration tube, and irrigation tube. The aspiration tube may have an inlet at its distal end and the aspiration tube extends through the shaft. Similarly, the aspiration tube can extend through the shaft and can have an inlet adjacent to the energy delivery tool. The energy delivery tool is configured to deliver ultrasonic energy and/or RF energy to the surgical site and is coupled to the
冲洗管可与流体源流体连通,并且吸出管可与真空源流体连通。流体源和/或真空源可座置在抽吸/冲洗模块128中。在一个示例中,流体源和/或真空源可独立于抽吸/冲洗模块128座置在外科集线器壳体136中。在此类示例中,流体接口能够将抽吸/冲洗模块128连接到流体源和/或真空源。The flush tube may be in fluid communication with the fluid source, and the aspiration tube may be in fluid communication with the vacuum source. A fluid source and/or a vacuum source may be seated in the aspiration/
在一个方面,外科集线器模块化壳体136上的模块140、126、128和/或其对应的对接底座可包括对齐特征部,该对齐特征部被配置成能够将模块的对接端口对齐成与其在外科集线器模块化壳体136的对接底座中的对应端口接合。例如,如图4中所示,组合发生器模块145包括侧支架155,侧支架155被配置成能够与外科集线器模块化壳体136的对应的对接底座151的对应支架156可滑动地接合。支架配合以引导组合发生器模块145的对接端口触点与外科集线器模块化壳体136的对接端口触点电接合。In one aspect, the
在一些方面,外科集线器模块化壳体136的抽屉151为相同的或大体上相同的大小,并且模块的大小被调节为接纳在抽屉151中。例如,侧支架155和/或156可根据模块的大小而更大或更小。在其它方面,抽屉151的大小不同,并且各自被设计成容纳特定模块。In some aspects, the
此外,可对特定模块的触点进行键控以与特定抽屉的触点接合,以避免将模块插入到具有不匹配触点的抽屉中。Additionally, the contacts of a particular module can be keyed to engage the contacts of a particular drawer to avoid inserting a module into a drawer with mismatched contacts.
如图4中所示,一个抽屉151的对接端口150可通过通信链路157耦合到另一个抽屉151的对接端口150,以有利于座置在外科集线器模块化壳体136中的模块之间的交互式通信。另选地或附加地,外科集线器模块化壳体136的对接端口150可有利于座置在外科集线器模块化壳体136中的模块之间的无线交互式通信。可采用任何合适的无线通信,诸如例如AirTitan-Bluetooth。As shown in FIG. 4 , the
图6示出了用于横向模块化外壳160的多个横向对接端口的单个功率总线附接件,该横向模块化外壳160被配置成能够接纳外科集线器206的多个模块。横向模块化外壳160被配置成能够横向接纳和互连模块161。模块161可滑动地插入到横向模块化外壳160的对接底座162中,该横向模块化外壳160包括用于互连模块161的底板。如图6中所示,模块161横向布置在横向模块化外壳160中。另选地,模块161可竖直地布置在横向模块化外壳中。FIG. 6 shows a single power bus attachment for multiple lateral docking ports of lateral
图7示出了被配置成能够接纳外科集线器106的多个模块165的竖直模块化外壳164。模块165可滑动地插入到竖直模块化外壳164的对接底座或抽屉167中,该竖直模块化外壳164包括用于互连模块165的底板。尽管竖直模块化外壳164的抽屉167竖直布置,但在某些情况下,竖直模块化外壳164可包括横向布置的抽屉。此外,模块165可通过竖直模块化外壳164的对接端口彼此交互。在图7的示例中,提供了用于显示与模块165的操作相关的数据的显示器177。此外,竖直模块化外壳164包括主模块178,该主模块座置可滑动地接纳在主模块178中的多个子模块。FIG. 7 shows a vertical
在各种方面,成像模块138包括集成视频处理器和模块化光源,并且适于与各种成像装置一起使用。在一个方面,成像装置由可装配有光源模块和相机模块的模块化外壳构成。外壳可为一次性外壳。在至少一个示例中,一次性外壳可移除地耦合到可重复使用的控制器、光源模块和相机模块。光源模块和/或相机模块可根据外科规程的类型选择性地选择。在一个方面,相机模块包括CCD传感器。在另一方面,相机模块包括CMOS传感器。在另一方面,相机模块被配置用于扫描波束成像。同样,光源模块可被配置成能够递送白光或不同的光,这取决于外科规程。In various aspects, the
在外科规程期间,从外科场地移除外科装置并用包括不同相机或不同光源的另一外科装置替换外科装置可为低效的。暂时失去对外科场地的视线可导致不期望的后果。本公开的模块成像装置被配置成能够允许在外科规程期间中流替换光源模块或相机模块,而不必从外科场地移除成像装置。During a surgical procedure, it can be inefficient to remove the surgical device from the surgical site and replace it with another surgical device that includes a different camera or a different light source. Temporary loss of sight to the surgical field can lead to undesired consequences. The modular imaging device of the present disclosure is configured to allow for midstream replacement of a light source module or camera module during a surgical procedure without having to remove the imaging device from the surgical site.
在一个方面,成像装置包括包括多个通道的管状外壳。第一通道被配置成能够可滑动地接纳相机模块,该相机模块可被配置用于与第一通道按扣配合接合。第二通道被配置成能够可滑动地接纳光源模块,该光源模块可被配置用于与第二通道按扣配合接合。在另一个示例中,相机模块和/或光源模块可在其相应通道内旋转到最终位置。可采用螺纹接合代替按扣配合接合。In one aspect, an imaging device includes a tubular housing that includes a plurality of channels. The first channel is configured to slidably receive a camera module that can be configured for snap-fit engagement with the first channel. The second channel is configured to slidably receive a light source module that can be configured for snap-fit engagement with the second channel. In another example, the camera module and/or the light source module may be rotated to a final position within their respective channels. A threaded engagement may be used instead of a snap fit engagement.
在各种示例中,多个成像装置被放置在外科场地中的不同位置以提供多个视图。成像模块138可被配置成能够在成像装置之间切换以提供最佳视图。在各种方面,成像模块138可被配置成能够集成来自不同成像装置的图像。In various examples, multiple imaging devices are placed at different locations in the surgical field to provide multiple views.
适用于本公开的各种图像处理器和成像装置描述于2011年8月9日公布的标题为组合SBI和常规图像处理器(COMBINED SBI AND CONVENTIONAL IMAGE PROCESSOR)美国专利7,995,045中,该专利全文以引用方式并入本文。此外,2011年7月19日公布的标题为SBI运动伪影去除设备和方法(SBI MOTION ARTIFACT REMOVAL APPARATUS AND METHOD)的美国专利7,982,776描述了用于从图像数据中去除运动伪影的各种系统,该专利全文以引用方式并入本文。此类系统可与成像模块138集成。此外,2011年12月15日公布的标题为“CONTROLLABLE MAGNETIC SOURCE TO FIXTURE INTRACORPOREAL APPARATUS”的美国专利申请公布2011/0306840和2014年8月28日公布的标题为“SYSTEM FOR PERFORMING AMINIMALLY INVASIVE SURGICAL PROCEDURE”的美国专利申请公布2014/0243597,这些专利申请中的每个的公开内容全文以引用方式并入本文。Various image processors and imaging devices suitable for use in the present disclosure are described in US Patent 7,995,045, entitled COMBINED SBI AND CONVENTIONAL IMAGE PROCESSOR, issued August 9, 2011, which is incorporated by reference in its entirety. method is incorporated herein. Additionally, US Patent 7,982,776, entitled SBI MOTION ARTIFACT REMOVAL APPARATUS AND METHOD, issued July 19, 2011, describes various systems for removing motion artifacts from image data, This patent is incorporated herein by reference in its entirety. Such systems may be integrated with
图8示出了包括模块化通信集线器203的外科数据网络201,该模块化通信集线器203被配置成能够将位于医疗设施的一个或多个手术室中的模块化装置或专门配备用于外科操作的医疗设施中的任何房间连接到基于云的系统(例如,可包括耦合到存储装置205的远程服务器213的云204)。在一个方面,模块化通信集线器203包括与网络路由器通信的网络集线器207和/或网络交换机209。模块化通信集线器203还可耦合到本地计算机系统210以提供本地计算机处理和数据操纵。外科数据网络201可被配置成无源的、智能的或交换的。无源外科数据网络充当数据的管道,从而使其能够从一个装置(或区段)转移到另一个装置(或区段)以及云计算资源。智能外科数据网络包括附加特征,以使得能够监测穿过外科数据网络的流量并配置网络集线器207或网络交换器209中的每个端口。智能外科数据网络可被称为可管理的集线器或交换器。交换集线器读取每个包的目标地址,并且然后将包转发到正确的端口。FIG. 8 shows a
位于手术室中的模块化装置1a-1n可耦合到模块化通信集线器203。网络集线器207和/或网络交换机209可耦合到网络路由器211以将装置1a-1n连接至云204或本地计算机系统210。与装置1a-1n相关联的数据可经由路由器传输到基于云的计算机,用于远程数据处理和操纵。与装置1a-1n相关联的数据也可被传输至本地计算机系统210以用于本地数据处理和操纵。位于相同手术室中的模块化装置2a-2m也可耦合到网络交换机209。网络交换机209可耦合到网络集线器207和/或网络路由器211以将装置2a-2m连接至云204。与装置2a-2n相关联的数据可经由网络路由器211传输到云204以用于数据处理和操纵。与装置2a-2m相关联的数据也可被传输至本地计算机系统210以用于本地数据处理和操纵。Modular devices 1 a - 1 n located in the operating room may be coupled to the
应当理解,可通过将多个网络集线器207和/或多个网络交换机209与多个网络路由器211互连来扩展外科数据网络201。模块化通信集线器203可被包含在模块化控制塔中,该模块化控制塔被配置成能够接纳多个装置1a-1n/2a-2m。本地计算机系统210也可包含在模块化控制塔中。模块化通信集线器203连接到显示器212以显示例如在外科规程期间由装置1a-1n/2a-2m中的一些获得的图像。在各种方面,装置1a-1n/2a-2m可包括例如各种模块,诸如耦合到内窥镜的成像模块138、耦合到基于能量的外科装置的发生器模块140、排烟模块126、抽吸/冲洗模块128、通信模块130、处理器模块132、存储阵列134、连接到显示器的外科装置、和/或可连接到外科数据网络201的模块化通信集线器203的其它模块化装置中的非接触传感器模块。It should be appreciated that the
在一个方面,外科数据网络201可包括将装置1a-1n/2a-2m连接至云的(一个或多个)网络集线器、(一个或多个)网络交换机和(一个或多个)网络路由器的组合。耦合到网络集线器或网络交换机的装置1a-1n/2a-2m中的任何一个或全部可实时收集数据并将数据传输到云计算机中以进行数据处理和操纵。应当理解,云计算依赖于共享计算资源,而不是使用本地服务器或个人装置来处理软件应用程序。可使用“云”一词作为“互联网”的隐喻,尽管该术语不受此限制。因此,本文可使用术语“云计算”来指“基于互联网的计算的类型”,其中将不同的服务(诸如服务器、存储器和应用程序)递送至位于外科室(例如,固定、移动、临时或现场手术室或空间)中的模块化通信集线器203和/或计算机系统210以及通过互联网连接至模块化通信集线器203和/或计算机系统210的装置。云基础设施可由云服务提供方维护。在这种情况下,云服务提供方可以是协调位于一个或多个手术室中的装置1a-1n/2a-2m的使用和控制的实体。云计算服务可基于由智能外科器械、机器人和位于手术室中的其它计算机化装置所收集的数据来执行大量计算。外科集线器硬件使多个装置或连接能够连接到与云计算资源和存储器通信的计算机。In one aspect, the
对由装置1a-1n/2a-2m所收集的数据应用云计算机数据处理技术,外科数据网络提供改善的外科结果,降低的成本和改善的患者满意度。可采用装置1a-1n/2a-2m中的至少一些来观察组织状态以评估在组织密封和切割规程之后密封的组织的渗漏或灌注。可采用装置1a-1n/2a-2m中的至少一些来识别病理学,诸如疾病的影响,使用基于云的计算检查包括用于诊断目的的身体组织样本的图像的数据。这包括组织和表型的定位和边缘确认。可采用装置1a-1n/2a-2m中的至少一些使用与成像装置和技术(诸如重叠由多个成像装置捕集的图像)集成的各种传感器来识别身体的解剖结构。由装置1a-1n/2a-2m收集的数据(包括图像数据)可被传输到云204或本地计算机系统210或两者以用于数据处理和操纵,包括图像处理和操纵。可分析数据以通过确定是否可继续进行进一步治疗(诸如内窥镜式干预、新兴技术、靶向辐射、靶向干预和精确机器人对组织特异性位点和状况的应用来改善外科规程结果。此类数据分析可进一步采用结果分析处理,并且使用标准化方法可提供有益反馈以确认外科治疗和外科医生的行为,或建议修改外科治疗和外科医生的行为。Applying cloud computer data processing technology to the data collected by the devices 1a-1n/2a-2m, the Surgical Data Network provides improved surgical outcomes, reduced costs and improved patient satisfaction. At least some of the devices 1a-1n/2a-2m may be employed to observe tissue status to assess leakage or perfusion of the sealed tissue following the tissue sealing and cutting procedure. At least some of the devices 1a-1n/2a-2m may be employed to identify pathology, such as the effects of disease, using cloud-based computing to examine data including images of body tissue samples for diagnostic purposes. This includes localization and edge confirmation of tissues and phenotypes. At least some of the devices 1a-1n/2a-2m may be employed to identify the anatomy of the body using various sensors integrated with imaging devices and techniques, such as overlaying images captured by multiple imaging devices. Data (including image data) collected by devices 1a-1n/2a-2m may be transmitted to cloud 204 or
在一个具体实施中,手术室装置1a-1n可通过有线信道或无线信道连接至模块化通信集线器203,这取决于装置1a-1n至网络集线器的配置。在一个方面,网络集线器207可被实现为在开放式系统互连(OSI)模型的物理层上工作的本地网络广播装置。该网络集线器提供与位于同一手术室网络中的装置1a-1n的连接。网络集线器207以包的形式收集数据,并以半双工模式将其发送至路由器。网络集线器207不存储用于传输装置数据的任何媒体访问控制/因特网协议(MAC/IP)。装置1a-1n中的仅一个可一次通过网络集线器207发送数据。网络集线器207没有关于在何处发送信息并在每个连接上广播所有网络数据以及通过云204向远程服务器213(图9)广播所有网络数据的路由表或智能。网络集线器207可以检测基本网络错误诸如冲突,但将所有信息广播到多个端口可带来安全风险并导致瓶颈。In one implementation, the operating room devices 1a-1n may be connected to the
在另一个具体实施中,手术室装置2a-2m可通过有线信道或无线信道连接到网络交换机209。网络交换机209在OSI模型的数据链路层中工作。网络交换机209是用于将位于相同手术室中的装置2a-2m连接到网络的多点广播装置。网络交换机209以帧的形式向网络路由器211发送数据并且以全双工模式工作。多个装置2a-2m可通过网络交换机209同时发送数据。网络交换机209存储并使用装置2a-2m的MAC地址来传输数据。In another implementation, the operating room devices 2a-2m may be connected to the
网络集线器207和/或网络交换机209耦合到网络路由器211以连接到云204。网络路由器211在OSI模型的网络层中工作。网络路由器211创建用于将从网络集线器207和/或网络交换机211接收的数据包发射至基于云的计算机资源的路由,以进一步处理和操纵由装置1a-1n/2a-2m中的任一者或所有收集的数据。可采用网络路由器211来连接位于不同位置的两个或更多个不同的网络,诸如例如同一医疗设施的不同手术室或位于不同医疗设施的不同手术室的不同网络。网络路由器211以包的形式向云204发送数据并且以全双工模式工作。多个装置可以同时发送数据。网络路由器211使用IP地址来传输数据。
在一个示例中,网络集线器207可被实现为USB集线器,其允许多个USB装置连接到主机。USB集线器可以将单个USB端口扩展到多个层级,以便有更多端口可用于将装置连接到主机系统计算机。网络集线器207可包括用于通过有线信道或无线信道接收信息的有线或无线能力。在一个方面,无线USB短距离、高带宽无线无线电通信协议可用于装置1a-1n和位于手术室中的装置2a-2m之间的通信。In one example, the
在其它示例中,手术室装置1a-1n/2a-2m可经由蓝牙无线技术标准与模块化通信集线器203通信,以用于在短距离(使用ISM频带中的2.4至2.485GHz的短波长UHF无线电波)从固定装置和移动装置交换数据以及构建个人局域网(PAN)。在其它方面,手术室装置1a-1n/2a-2m可经由多种无线或有线通信标准或协议与模块化通信集线器203通信,包括但不限于Wi-Fi(IEEE 802.11系列)、WiMAX(IEEE 802.16系列)、IEEE 802.20、长期演进(LTE)和Ev-DO、HSPA+、HSDPA+、HSUPA+、EDGE、GSM、GPRS、CDMA、TDMA、DECT、及其以太网衍生物、以及指定为3G、4G、5G和以上的任何其它无线和有线协议。计算模块可包括多个通信模块。例如,第一通信模块可专用于较短距离的无线通信诸如Wi-Fi和蓝牙,并且第二通信模块可专用于较长距离的无线通信,诸如GPS、EDGE、GPRS、CDMA、WiMAX、LTE、Ev-DO等。In other examples, the operating room devices 1a-1n/2a-2m may communicate with the
模块化通信集线器203可用作手术室装置1a-1n/2a-2m中的一者或全部的中心连接,并且处理被称为帧的数据类型。帧携带由装置1a-1n/2a-2m生成的数据。当模块化通信集线器203接收到帧时,其被放大并发射至网络路由器211,该网络路由器211通过使用如本文所述的多个无线或有线通信标准或协议将数据传输到云计算资源。The
模块化通信集线器203可用作独立装置或连接到兼容的网络集线器和网络交换机以形成更大的网络。模块化通信集线器203通常易于安装、配置和维护,使得其成为对手术室装置1a-1n/2a-2m进行联网的良好选项。
图9示出了计算机实现的交互式外科系统200。计算机实现的交互式外科系统200在许多方面类似于计算机实现的交互式外科系统100。例如,计算机实现的交互式外科系统200包括在许多方面类似于外科系统102的一个或多个外科系统202。每个外科系统202包括与可包括远程服务器213的云204通信的至少一个外科集线器206。在一个方面,计算机实现的交互式外科系统200包括模块化控制塔236,该模块化控制塔236连接到多个手术室装置,诸如例如智能外科器械、机器人和位于手术室中的其它计算机化装置。如图10中所示,模块化控制塔236包括耦合到计算机系统210的模块化通信集线器203。如图9的示例中所示,模块化控制塔236耦合到耦合到内窥镜239的成像模块238、耦合到能量装置241的发生器模块240、排烟模块226、抽吸/冲洗模块228、通信模块230、处理器模块232、存储阵列234、任选地耦合到显示器237的智能装置/器械235、和非接触传感器模块242。手术室装置经由模块化控制塔236耦合到云计算资源和数据存储。机器人集线器222也可连接到模块化控制塔236和云计算资源。装置/器械235、可视化系统208等等可经由有线或无线通信标准或协议耦合到模块化控制塔236,如本文所述。模块化控制塔236可耦合到外科集线器显示器215(例如,监测器、屏幕)以显示和叠加从成像模块、装置/器械显示器和/或其它可视化系统208接收的图像。外科集线器显示器还可结合图像和叠加图像来显示从连接到模块化控制塔的装置接收的数据。FIG. 9 shows a computer-implemented interactive
图10示出了包括耦合到模块化控制塔236的多个模块的外科集线器206。模块化控制塔236包括模块化通信集线器203(例如,网络连接性装置)和计算机系统210,以提供例如本地处理、可视化和成像。如图10中所示,模块化通信集线器203可以分层配置连接以扩展可连接到模块化通信集线器203的模块(例如,装置)的数量,并将与模块相关联的数据传输至计算机系统210、云计算资源或两者。如图10中所示,模块化通信集线器203中的网络集线器/交换机中的每个包括三个下游端口和一个上游端口。上游网络集线器/交换机连接至处理器以提供与云计算资源和本地显示器217的通信连接。与云204的通信可通过有线或无线通信信道进行。FIG. 10 shows
外科集线器206采用非接触传感器模块242来测量手术室的尺寸,并且使用超声或激光型非接触测量装置来生成外科室的标测图。基于超声的非接触传感器模块通过发射一阵超声波并在其从手术室的围墙弹回时接收回波来扫描手术室,如在2017年12月28日提交的标题为“交互式外科平台(INTERACTIVE SURGICAL PLATFORM)”的美国临时专利申请序列号62/611,341中的标题“手术室内的外科集线器空间感知(Surgical Hub SpatialAwareness Within an Operating Room)”下所述,该临时专利申请全文以引用方式并入本文,其中传感器模块被配置成能够确定手术室的大小并调节蓝牙配对距离限制。基于激光的非接触传感器模块通过发射激光脉冲、接收从手术室的围墙弹回的激光脉冲,以及将发射脉冲的相位与所接收的脉冲进行比较来扫描手术室,以确定手术室的尺寸并调节蓝牙配对距离限制。
计算机系统210包括处理器244和网络接口245。处理器244经由系统总线耦合到通信模块247、存储装置248、存储器249、非易失性存储器250和输入/输出接口251。系统总线可为若干类型的总线结构中的任一者,该总线结构包括存储器总线或存储器控制器、外围总线或外部总线、和/或使用任何各种可用总线架构的本地总线,包括但不限于9位总线、工业标准架构(ISA)、微型Charmel架构(MSA)、扩展ISA(EISA)、智能驱动电子器件(IDE)、VESA本地总线(VLB)、外围器件互连(PCI)、USB、高级图形端口(AGP)、个人计算机存储卡国际协会总线(PCMCIA)、小型计算机系统接口(SCSI)或任何其它外围总线。
控制器244可为任何单核或多核处理器,诸如由德克萨斯器械公司(TexasInstruments)提供的商品名为ARM Cortex的那些处理器。在一个方面,处理器可为购自例如德克萨斯器械公司(Texas Instruments)LM4F230H5QR ARM Cortex-M4F处理器核心,其包括256KB的单循环闪存或其它非易失性存储器(最多至40MHZ)的片上存储器、用于改善40MHz以上的性能的预取缓冲器、32KB单循环序列随机存取存储器(SRAM)、装载有
在一个方面,处理器244可包括安全控制器,该安全控制器包括两个基于控制器的系列(诸如TMS570和RM4x),已知同样由德克萨斯器械公司(Texas Instruments)生产的商品名为Hercules ARM Cortex R4。安全控制器可被配置成能够专门用于IEC 61508和ISO26262安全关键应用等等,以提供先进的集成安全特征部,同时递送可定标的性能、连接性和存储器选项。In one aspect, the
系统存储器包括易失性存储器和非易失性存储器。基本输入/输出系统(BIOS)(包含诸如在启动期间在计算机系统内的元件之间传输信息的基本例程,)存储在非易失性存储器中。例如,非易失性存储器可包括ROM、可编程ROM(PROM)、电可编程ROM(EPROM)、EEPROM或闪存。易失存储器包括充当外部高速缓存存储器的随机存取存储器(RAM)。此外,RAM可以多种形式可用,诸如SRAM、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据速率SDRAM(DDRSDRAM)增强SDRAM(ESDRAM)、同步链路DRAM(SLDRAM)和直接Rambus RAM(DRRAM)。System memory includes volatile memory and nonvolatile memory. A basic input/output system (BIOS), which contains the basic routines for transferring information between elements within a computer system, such as during startup, is stored in non-volatile memory. For example, nonvolatile memory may include ROM, programmable ROM (PROM), electrically programmable ROM (EPROM), EEPROM, or flash memory. Volatile memory includes random access memory (RAM) that acts as external cache memory. Additionally, RAM is available in various forms such as SRAM, Dynamic RAM (DRAM), Synchronous DRAM (SDRAM), Double Data Rate SDRAM (DDRSDRAM) Enhanced SDRAM (ESDRAM), Synchronous Link DRAM (SLDRAM), and Direct Rambus RAM (DRRAM) ).
计算机系统210还包括可移除/不可移除的、易失性/非易失性的计算机存储介质,诸如例如磁盘存储器。磁盘存储器包括但不限于诸如装置如磁盘驱动器、软盘驱动器、磁带驱动器、Jaz驱动器、Zip驱动器、LS-60驱动器、闪存存储卡或内存条。此外,磁盘存储器可包括单独地或与其它存储介质组合的存储介质,包括但不限于光盘驱动器诸如光盘ROM装置(CD-ROM)、光盘可记录驱动器(CD-R驱动器)、光盘可重写驱动器(CD-RW驱动器)或数字通用磁盘ROM驱动器(DVD-ROM)。为了有利于磁盘存储装置与系统总线的连接,可使用可移除或非可移除接口。
应当理解,计算机系统210包括充当用户与在合适的操作环境中描述的基本计算机资源之间的中介的软件。此类软件包括操作系统。可存储在磁盘存储装置上的操作系统用于控制并分配计算机系统的资源。系统应用程序利用操作系统通过存储在系统存储器或磁盘存储装置中的程序模块和程序数据来管理资源。应当理解,本文所述的各种部件可用各种操作系统或操作系统的组合来实现。It should be understood that
用户通过耦合到I/O接口251的(一个或多个)输入装置将命令或信息输入到计算机系统210中。输入装置包括但不限于指向装置,诸如鼠标、触控球、触笔、触摸板、键盘、麦克风、操纵杆、游戏垫、卫星盘、扫描仪、电视调谐器卡、数字相机、数字摄像机、幅材相机等。这些和其它输入装置经由(一个或多个)接口端口通过系统总线连接到处理器。(一个或多个)接口端口包括例如串口、并行端口、游戏端口和USB。(一个或多个)输出装置使用与(一个或多个)输入装置相同类型的端口。因此,例如,USB端口可用于向计算机系统提供输入并将信息从计算机系统输出到输出装置。提供了输出适配器来说明在其它输出装置中存在需要特殊适配器的一些输出装置(如监测器、显示器、扬声器和打印机。输出适配器以举例的方式包括但不限于提供输出装置和系统总线之间的连接装置的视频和声卡。应当指出,其它装置或装置诸如(一个或多个)远程计算机的系统提供了输入能力和输出能力两者。A user enters commands or information into
计算机系统210可使用与一个或多个远程计算机(诸如(一个或多个)云计算机)或本地计算机的逻辑连接在联网环境中操作。(一个或多个)远程云计算机可为个人计算机、服务器、路由器、网络PC、工作站、基于微处理器的器具、对等装置或其它公共网络节点等,并且通常包括相对于计算机系统所述的元件中的许多或全部。为简明起见,仅示出了具有(一个或多个)远程计算机的存储器存储装置。(一个或多个)远程计算机通过网络接口在逻辑上连接到计算机系统,并且然后经由通信连接物理连接。网络接口涵盖通信网络诸如局域网(LAN)和广域网(WAN)。LAN技术包括光纤分布式数据接口(FDDI)、铜分布式数据接口(CDDI)、以太网/IEEE 802.3、令牌环/IEEE 802.5等。WAN技术包括但不限于点对点链路、电路交换网络如综合业务数字网络(ISDN)及其变体、分组交换网络和数字用户管线(DSL)。
在各种方面,图10的计算机系统210、成像模块238和/或可视化系统208、和/或图9-10的处理器模块232可包括图像处理器、图像处理引擎、媒体处理器、或用于处理数字图像的任何专用数字信号处理器(DSP)。图像处理器可采用具有单个指令、多数据(SIMD)或多指令、多数据(MIMD)技术的并行计算以提高速度和效率。数字图像处理引擎可执行一系列任务。图像处理器可为具有多核处理器架构的芯片上的系统。In various aspects,
(一个或多个)通信连接是指用于将网络接口连接到总线的硬件/软件。虽然示出了通信连接以便在计算机系统内进行示例性澄清,但其也可位于计算机系统210的外部。连接到网络接口所必需的硬件/软件仅出于示例性目的包括内部和外部技术,诸如调制解调器,包括常规的电话级调制解调器、电缆调制解调器和DSL调制解调器、ISDN适配器和以太网卡。The communication connection(s) refers to the hardware/software used to connect the network interface to the bus. Although shown for example clarification within the computer system, the communication connection may also be located external to the
图11示出了根据本公开的一个方面的USB网络集线器300装置的一个方面的功能框图。在例示的方面,USB网络集线器装置300采用得克萨斯器械公司(Texas Instruments)的TUSB2036集成电路集线器。USB网络集线器300是根据USB 2.0规范提供上游USB收发器端口302和多达三个下游USB收发器端口304、306、308的CMOS装置。上游USB收发器端口302为差分根数据端口,其包括与差分数据正(DM0)输入配对的差分数据负(DP0)输入。三个下游USB收发器端口304、306、308为差分数据端口,其中每个端口包括与差分数据负(DM1-DM3)输出配对的差分数据正(DP1-DP3)输出。11 shows a functional block diagram of one aspect of a
USB网络集线器300装置用数字状态机而不是微控制器来实现,并且不需要固件编程。完全兼容的USB收发器集成到用于上游USB收发器端口302和所有下游USB收发器端口304、306、308的电路中。下游USB收发器端口304、306、308通过根据附接到端口的装置的速度自动设置转换速率来支持全速度装置和低速装置两者。USB网络集线器300装置可被配置成处于总线供电模式或自供电模式,并且包括用于管理功率的外科集线器功率逻辑312。The
USB网络集线器300装置包括串行接口引擎310(SIE)。SIE 310是USB网络集线器300硬件的前端,并处理USB规范第8章中描述的大多数协议。SIE 310通常包括多达交易级别的信令。其处理的功能可包括:包识别、事务排序、SOP、EOP、RESET和RESUME信号检测/生成、时钟/数据分离、不返回到零反转(NRZI)数据编码/解码和数位填充、CRC生成和校验(令牌和数据)、包ID(PID)生成和校验/解码、和/或串行并行/并行串行转换。310接收时钟输入314并且耦合到暂停/恢复逻辑和帧定时器316电路以及外科集线器中继器电路318,以通过端口逻辑电路320、322、324来控制上游USB收发器端口302和下游USB收发器端口304、306、308之间的通信。SIE 310经由接口逻辑耦合到命令解码器326,以经由串行EEPROM接口330来控制来自串行EEPROM的命令。The
在各种方面,USB网络集线器300可将配置在多达六个逻辑层(层级)中的127功能连接至单个计算机。此外,USB网络集线器300可使用提供通信和电力分配两者的标准化四线电缆连接到所有外装置。功率配置为总线供电模式和自供电模式。USB网络集线器300可被配置成能够支持四种功率管理模式:具有单独端口功率管理或成套端口功率管理的总线供电集线器,以及具有单独端口功率管理或成套端口功率管理的自供电集线器。在一个方面,使用USB电缆将USB网络集线器300、上游USB收发器端口302插入USB主机控制器中,并且将下游USB收发器端口304、306、308暴露以用于连接USB兼容装置等。In various aspects, the
图12示出了根据本公开的一个或多个方面的外科器械或工具的控制系统470的逻辑图。系统470包括控制电路。控制电路包括微控制器461,微控制器461包括处理器462和存储器468。例如,传感器472、474、476中的一个或多个向处理器462提供实时反馈。由马达驱动器492驱动的马达482可操作地耦合纵向可移动的位移构件以驱动I形梁刀元件。跟踪系统480被配置成能够确定纵向可移动的位移构件的位置。将位置信息提供给处理器462,该处理器可被编程或配置成能够确定纵向可移动的驱动构件的位置以及击发构件、击发杆和I形梁刀元件的位置。附加马达可设置在工具驱动器接口处,以控制I形梁击发、闭合管行进、轴旋转和关节运动。显示器473显示器械的多种操作条件并且可包括用于数据输入的触摸屏功能。显示在显示器473上的信息可叠加有经由内窥镜式成像模块获取的图像。12 shows a logic diagram of a
在一个方面,微处理器461可为任何单核或多核处理器,诸如已知的由德克萨斯器械公司(Texas Instruments)生产的商品名为ARM Cortex的那些。在一个方面,主微控制器461可为购自例如德克萨斯器械公司(Texas Instruments)的LM4F230H5QR ARM Cortex-M4F处理器核心,其包括256KB的单循环闪存或其它非易失性存储器(最多至40MHZ)的片上存储器、用于改善40MHz以上的性能的预取缓冲器、32KB单循环SRAM、装载有
在一个方面,微控制器461可包括安全控制器,该安全控制器包括两个基于控制器的系列(诸如TMS570和RM4x),已知同样由德克萨斯器械公司(Texas Instruments)生产的商品名为Hercules ARM Cortex R4。安全控制器可被配置成能够专门用于IEC 61508和ISO26262安全关键应用等等,以提供先进的集成安全特征部,同时递送可定标的性能、连接性和存储器选项。In one aspect,
可对微控制器461进行编程以执行各种功能,诸如对刀和关节运动系统的速度和位置的精确控制。在一个方面,微控制器461包括处理器462和存储器468。电动马达482可为有刷直流(DC)马达,其具有齿轮箱以及至关节运动或刀系统的机械链路。在一个方面,马达驱动器492可为可购自Allegro微系统公司(Allegro Microsystems,Inc)的A3941。其它马达驱动器可容易地被替换以用于包括绝对定位系统的跟踪系统480中。绝对定位系统的详细描述在2017年10月19日公布的标题为用于控制外科缝合和切割器械的系统和方法(SYSTEMS AND METHODS FOR CONTROLLING A SURGICAL STAPLING AND CUTTINGINSTRUMENT)的美国专利申请公布2017/0296213中有所描述,该专利申请全文以引用方式并入本文。The
微控制器461可被编程为提供对位移构件和关节运动系统的速度和位置的精确控制。微控制器461可被配置成能够计算微控制器461的软件中的响应。将计算的响应与实际系统的所测量响应进行比较,以获得“观察到的”响应,其用于实际反馈决定。观察到的响应为有利的调谐值,该值使所模拟响应的平滑连续性质与所测量响应均衡,这可检测对系统的外部影响。The
在一个方面,马达482可由马达驱动器492控制并可被外科器械或工具的击发系统采用。在各种形式中,马达482可为具有大约25,000RPM的最大旋转速度的有刷DC驱动马达。在其它布置中,马达482可包括无刷马达、无绳马达、同步马达、步进马达、或任何其它合适的电动马达。马达驱动器492可包括例如包括场效应晶体管(FET)的H桥驱动器。马达482可通过可释放地安装到柄部组件或工具外壳的功率组件来供电,以用于向外科器械或工具供应控制功率。功率组件可包括电池,该电池可以包括串联连接的、可用作功率源以为外科器械或工具提供电力的多个电池单元。在某些情况下,功率组件的电池单元可以是可替换的和/或可再充电的。在至少一个示例中,电池单元可为锂离子电池,其可耦合到功率组件并且可与功率组件分离。In one aspect,
驱动器492可为可购自Allegro微系统公司(Allegro Microsystems,Inc)的A3941。A3941 492为全桥控制器,其用于与针对电感负载(诸如有刷DC马达)特别设计的外部N信道功率金属氧化物半导体场效应晶体管(MOSFET)一起使用。驱动器492包括独特的电荷泵调整器,其为低至7V的电池电压提供完整的(>10V)栅极驱动并且允许A3941在低至5.5V的减小的栅极驱动下操作。可采用自举电容器来提供N信道MOSFET所需的上述电池供电电压。高边驱动装置的内部电荷泵允许直流(100%占空比)操作。可使用二极管或同步整流在快衰减模式或慢衰减模式下驱动全桥。在慢衰减模式下,电流再循环可穿过高边或低边FET。通过电阻器可调式空载时间保护功率FET不被击穿。整体诊断提供欠压、过热和功率桥故障的指示,并且可被配置成能够在大多数短路状况下保护功率MOSFET。其它马达驱动器可容易地被替换以用于包括绝对定位系统的跟踪系统480中。
跟踪系统480包括根据本公开的一个方面的包括位置传感器472的受控马达驱动电路布置方式。用于绝对定位系统的位置传感器472提供对应于位移构件的位置的独特位置信号。在一个方面,位移构件表示纵向可移动的驱动构件,其包括用于与齿轮减速器组件的对应驱动齿轮啮合接合的驱动齿的齿条。在其它方面,位移构件表示击发构件,该击发构件可被适配和配置成能够包括驱动齿的齿条。在又一个方面,位移构件表示击发杆或I形梁,该击发杆或I形梁中的每个可被适配和配置成能够包括驱动齿的齿条。因此,如本文所用,术语位移构件通常用于指外科器械或工具的任何可移动的构件,诸如驱动构件、击发构件、击发杆、I形梁或可进行移位的任何元件。在一个方面,纵向可移动的驱动构件联接到击发构件、击发杆和I形梁。因此,绝对定位系统实际上可通过跟踪纵向可移动的驱动构件的线性位移来跟踪I形梁的线性位移。在各种其它方面,位移构件可耦合到适于测量线性位移的任何位置传感器472。因此,纵向可移动驱动构件、击发构件、击发杆或I形梁或它们的组合可耦合到任何合适的线性位移传感器。线性位移传感器可包括接触式位移传感器或非接触式位移传感器。线性位移传感器可包括线性可变差分变压器(LVDT)、差分可变磁阻换能器(DVRT)、滑动电位计、包括可移动磁体和一系列线性布置的霍尔效应传感器的磁感测系统、包括固定磁体和一系列可移动的线性布置的霍尔效应传感器的磁感测系统、包括可移动光源和一系列线性布置的光电二极管或光电检测器的光学感测系统、包括固定光源和一系列可移动的线性布置的光电二极管或光电检测器的光学感测系统、或它们的任何组合。
电动马达482可包括操作地与齿轮组件交接的可旋转轴,该齿轮组件与驱动齿的组或齿条啮合接合安装在位移构件上。传感器元件可以可操作地耦合到齿轮组件,使得位置传感器472元件的单次旋转对应于位移构件的一些线性纵向平移。传动装置和传感器的布置方式可经由齿条和小齿轮布置方式连接至线性致动器,或者经由直齿齿轮或其它连接连接至旋转致动器。功率源为绝对定位系统供电,并且输出指示器可显示绝对定位系统的输出。位移构件表示纵向可移动驱动构件,该纵向可移动驱动构件包括形成于其上的驱动齿的齿条,以用于与齿轮减速器组件的对应驱动齿轮啮合接合。位移构件表示纵向可移动的击发构件、击发杆、I形梁或它们的组合。The
与位置传感器472相关联的传感器元件的单次旋转等同于位移构件的纵向线性位移d1,其中d1为在耦合到位移构件的传感器元件的单次旋转之后位移构件从点“a”移动到点“b”的纵向线性距离。可经由齿轮减速连接传感器布置方式,该齿轮减速使得位置传感器472针对位移构件的全行程仅完成一次或多次旋转。位置传感器472可针对位移构件的全行程完成多次旋转。A single rotation of the sensor element associated with
可单独或结合齿轮减速采用一系列开关(其中n为大于一的整数)以针对位置传感器472的多于一次旋转提供独特位置信号。开关的状态被馈送回微控制器461,该微控制器461应用逻辑以确定对应于位移构件的纵向线性位移d1+d2+…dn的独特位置信号。位置传感器472的输出被提供给微控制器461。该传感器布置方式的位置传感器472可包括磁性传感器、模拟旋转传感器(如电位差计)、模拟霍尔效应元件的阵列,该霍尔效应元件的阵列输出位置信号或值的独特组合。A series of switches (where n is an integer greater than one) may be employed alone or in combination with gear reduction to provide a unique position signal for more than one rotation of the
位置传感器472可包括任何数量的磁性感测元件,诸如例如根据它们是否测量磁场的总磁场或矢量分量而被分类的磁性传感器。用于产生上述两种类型磁性传感器的技术涵盖物理学和电子学的多个方面。用于磁场感测的技术包括探查线圈、磁通门、光泵、核旋、超导量子干涉仪(SQUID)、霍尔效应、各向异性磁电阻、巨磁电阻、磁性隧道结、巨磁阻抗、磁致伸缩/压电复合材料、磁敏二极管、磁敏晶体管、光纤、磁光,以及基于微机电系统的磁性传感器等等。
在一个方面,用于包括绝对定位系统的跟踪系统480的位置传感器472包括磁性旋转绝对定位系统。位置传感器472可被实现为AS5055EQFT单片磁性旋转位置传感器,其购自Austria Microsystems(AG)。位置传感器472与微控制器461交接,以提供绝对定位系统。位置传感器472为低电压和低功率部件,并且包括位于磁体上的位置传感器472的区域中的四个霍尔效应元件。在芯片上还提供了高分辨率ADC和智能功率管理控制器。提供了坐标旋转数字计算机(CORDIC)处理器(也被称为逐位法和Volder算法)以执行简单有效的算法来计算双曲线函数和三角函数,其仅需要加法、减法、数位位移和表格查找操作。角位置、报警位和磁场信息通过标准串行通信接口(诸如串行外围接口(SPI)接口)发射到微控制器461。位置传感器472提供12或14位分辨率。位置传感器472可为以小QFN 16引脚4mm×4mm×0.85mm封装提供的AS5055芯片。In one aspect, the
包括绝对定位系统的跟踪系统480可包括并且/或者可被编程以实现反馈控制器,诸如PID、状态反馈和自适应控制器。功率源将来自反馈控制器的信号转换为对系统的物理输入:在这种情况下为电压。其它示例包括电压、电流和力的PWM。除了由位置传感器472所测量的位置之外,可提供(一个或多个)其它传感器来测量物理系统的物理参数。在一些方面,(一个或多个)其它传感器可包括传感器布置方式,诸如在以下专利中所述的那些:2016年5月24日发布的标题为钉仓组织厚度传感器系统(STAPLE CARTRIDGE TISSUETHICKNESS)的美国专利9,345,481,该专利全文以引用方式并入本文;2014年9月18日公布的标题为钉仓组织厚度传感器系统(STAPLE CARTRIDGE TISSUE THICKNESS)的美国专利申请公布2014/0263552,该专利全文以引用方式并入本文;以及2017年6月20日提交的标题为用于外科缝合和切割器械的马达速度的自适应控制的技术(TECHNIQUES FOR ADAPTIVECONTROL OF MOTOR VELOCITY OF A SURGICAL STAPLING AND CUTTING INSTRUMENT)的美国专利申请序列号15/628,175,该专利申请全文以引用方式并入本文。在数字信号处理系统中,绝对定位系统耦合到数字数据采集系统,其中绝对定位系统的输出将具有有限分辨率和采样频率。绝对定位系统可包括比较和组合电路,以使用算法(诸如加权平均和理论控制环路)将计算响应与测量响应进行组合,该算法驱动计算响应朝向所测量的响应。物理系统的计算响应将特性如质量、惯性、粘性摩擦、电感电阻考虑在内,以通过得知输入预测物理系统的状态和输出。
因此,绝对定位系统在器械上电时提供位移构件的绝对位置,并且不使位移构件回缩或推进至如常规旋转编码器可需要的复位(清零或本位)位置,这些编码器仅对马达482采取的向前或向后的步骤数进行计数以推断装置致动器、驱动棒、刀等等的位置。Thus, the absolute positioning system provides the absolute position of the displacement member when the instrument is powered on, and does not retract or advance the displacement member to the reset (zero or home) position as may be required by conventional rotary encoders, which are 482 The number of forward or backward steps taken is counted to deduce the position of device actuators, drive rods, knives, etc.
传感器474(诸如,例如应变仪或微应变仪)被配置成能够测量端部执行器的一个或多个参数,诸如例如在夹持操作期间施加在砧座上的应变的振幅,该振幅可以指示施加到砧座的闭合力。将测得的应变转换成数字信号并将其提供给处理器462。另选地或除了传感器474之外,传感器476(诸如负载传感器)可以测量由闭合驱动系统施加到砧座的闭合力。传感器476诸如负载传感器可以测量在外科器械或工具的击发行程中施加到I形梁的击发力。I形梁被构造成能够接合楔形滑动件,该楔形滑动件被构造成能够使钉驱动器向上凸轮运动以将钉推出以与砧座变形接触。I形梁还包括锋利切割刃,当通过击发杆向远侧推进I形梁时,该切割刃可用于切断组织。另选地,可以采用电流传感器478来测量由马达482消耗的电流。推进击发构件所需的力可对应于例如由马达482消耗的电流。将测得的力转换成数字信号并将其提供给处理器462。Sensors 474 (such as, for example, strain gauges or micro-strain gauges) are configured to measure one or more parameters of the end effector, such as, for example, the amplitude of the strain exerted on the anvil during the clamping operation, which amplitude may indicate The closing force applied to the anvil. The measured strain is converted into a digital signal and provided to
在一种形式中,应变仪传感器474可用于测量由端部执行器施加到组织的力。应变计可耦合到端部执行器以测量被端部执行器处理的组织上的力。用于测量施加到由端部执行器抓握的组织的力的系统包括应变仪传感器474,诸如例如微应变仪,其被配置成能够测量例如端部执行器的一个或多个参数。在一个方面,应变仪传感器474可测量在夹持操作期间施加于端部执行器的钳口构件上的应变的振幅或量值,这可指示组织压缩。将测得的应变转换成数字信号并将其提供到微控制器461的处理器462。负载传感器476可测量用于操作刀元件例如以切割被捕集在砧座和钉仓之间的组织的力。可采用磁场传感器来测量捕集的组织的厚度。磁场传感器的测量值也可被转换成数字信号并提供给处理器462。In one form, the
微控制器461可使用分别由传感器474、476测量的组织压缩、组织厚度和/或闭合端部执行器所需的力的测量来表征击发构件的所选择的位置和/或击发构件的速度的对应值。在一个实例中,存储器468可存储可由微控制器461在评估中所采用的技术、公式和/或查找表。
外科器械或工具的控制系统470还可包括有线或无线通信电路以与模块化通信集线器通信,如图8-11中所示。The
图13示出了控制电路500,该控制电路500被配置成能够控制根据本公开的一个方面的外科器械或工具的各方面。控制电路500可被配置成能够实现本文所述的各种过程。电路500可以包括微控制器,该微控制器包括耦合到至少一个存储器电路504的一个或多个处理器502(例如,微处理器、微控制器)。存储器电路504存储在由处理器502执行时使处理器502执行机器指令以实现本文所述的各种过程的机器可执行指令。处理器502可为本领域中已知的多种单核或多核处理器中的任一种。存储器电路504可以包括易失性存储介质和非易失性存储介质。处理器502可以包括指令处理单元506和运算单元508。指令处理单元可以被配置成能够从本公开的存储器电路504接收指令。FIG. 13 shows a
图14示出了组合逻辑电路510,该组合逻辑电路510被配置成能够控制根据本公开的一个方面的外科器械或工具的各方面。组合逻辑电路510可被配置成能够实现本文所述的各种过程。组合逻辑电路510可包括有限状态机,该有限状态机包括组合逻辑512,该组合逻辑512被配置成能够在输入514处接收与外科器械或工具相关联的数据,通过组合逻辑512处理数据并提供输出516。FIG. 14 shows a
图15示出了根据本公开的一个方面的被配置成能够控制外科器械或工具的各个方面的时序逻辑电路520。时序逻辑电路520或组合逻辑522可被配置成能够实现本文所述的各种过程。时序逻辑电路520可包括有限状态机。时序逻辑电路520可包括例如组合逻辑522、至少一个存储器电路524和时钟529。至少一个存储器电路524可以存储有限状态机的当前状态。在某些情况下,时序逻辑电路520可以是同步的或异步的。组合逻辑522被配置成能够从输入526接收与外科器械或工具相关联的数据,通过组合逻辑522处理数据并提供输出528。在其它方面,电路可包括处理器(例如,处理器502,图13)和有限状态机的组合以实现本文的各种过程。在其它实施方案中,有限状态机可以包括组合逻辑电路(例如,组合逻辑电路510,图14)和时序逻辑电路520的组合。15 illustrates
图16示出了包括可被激活以执行各种功能的多个马达的外科器械或工具。在某些情况下,第一马达可被激活以执行第一功能,第二马达可被激活以执行第二功能,并且第三马达可被激活以执行第三功能。在某些情况下,机器人外科器械600的多个马达可被单独地激活以导致端部执行器中的击发运动、闭合运动、和/或关节运动。击发运动、闭合运动、和/或关节运动可例如通过轴组件传送到端部执行器。Figure 16 illustrates a surgical instrument or tool that includes multiple motors that can be activated to perform various functions. In some cases, a first motor may be activated to perform a first function, a second motor may be activated to perform a second function, and a third motor may be activated to perform a third function. In some cases, the multiple motors of the robotic
在某些情况下,外科器械系统或工具可包括击发马达602。击发马达602可操作地耦合到击发马达驱动组件604,该击发马达驱动组件可被配置成能够将由马达602生成的击发运动传输到端部执行器,具体地用于移置I形梁元件。在某些情况下,由马达602生成的击发运动可导致例如钉从钉仓部署到由端部执行器捕获的组织内并且/或者导致I形梁元件的切割刃被推进以切割所捕获组织。I形梁元件可通过反转马达602的方向而回缩。In some cases, the surgical instrument system or tool may include a firing
在某些情况下,外科器械或工具可包括闭合马达603。闭合马达603可以可操作地联接到闭合马达驱动组件605,该闭合马达驱动组件605被配置成能够将由马达603生成的闭合运动传送到端部执行器,具体地用于移置闭合管以闭合砧座并且压缩砧座和钉仓之间的组织。闭合运动可使例如端部执行器从打开构型转变成接近构型以捕集组织。端部执行器可通过反转马达603的方向而转变到打开位置。In some cases, the surgical instrument or tool may include a
在某些情况下,外科器械或工具可包括例如一个或多个关节运动马达606a、606b。马达606a、606b可以操作地耦合到相应的关节运动马达驱动组件608a、608b,该关节运动马达驱动组件可被配置成能够将由马达606a、606b生成的关节运动发射到端部执行器。在某些情况下,关节运动可使端部执行器相对于轴进行关节运动,例如。In some cases, the surgical instrument or tool may include, for example, one or
如上所述,外科器械或工具可包括多个马达,该多个马达可被配置成能够执行各种独立功能。在某些情况下,外科器械或工具的多个马达可被单独地或独立地激活以执行一个或多个功能,而其它马达保持非活动的。例如,关节运动马达606a、606b可被激活以使端部执行器进行关节运动,而击发马达602保持非活动的。另选地,击发马达602可被激活以击发多个钉并且/或者推进切割刃,而关节运动马达606保持非活动的。此外,闭合马达603可与击发马达602同时被激活,以使闭合管和I形梁元件向远侧推进,如下文更详细地描述。As mentioned above, a surgical instrument or tool may include multiple motors that may be configured to perform various independent functions. In some cases, multiple motors of a surgical instrument or tool may be activated individually or independently to perform one or more functions, while other motors remain inactive. For example, the
在某些情况下,外科器械或工具可包括公共控制模块610,该公共控制模块610可与外科器械或工具的多个马达一起使用。在某些情况下,公共控制模块610每次可调节多个马达中的一个马达。例如,公共控制模块610可单独地耦合到外科器械的多个马达并且可从外科器械的多个马达分离。在某些情况下,外科器械或工具的多个马达可共用一个或多个公共控制模块诸如公共控制模块610。在某些情况下,外科器械或工具的多个马达可独立地和选择性地接合公共控制模块610。在某些情况下,公共控制模块610可从与外科器械或工具的多个马达中的一个交接切换到与外科器械或工具的多个马达中的另一个交接。In some cases, the surgical instrument or tool can include a
在至少一个示例中,公共控制模块610可在可操作地接合关节运动马达606a、606b与可操作地接合击发马达602或闭合马达603之间选择性地切换。在至少一个示例中,如图16中所示,开关614可在多个位置和/或状态之间移动或转变。在第一位置616中,开关614可以将公共控制模块610电耦合到击发马达602;在第二位置617中,开关614可以将公共控制模块610电耦合到闭合马达603;在第三位置618a中,开关614可以将公共控制模块610电耦合到第一关节运动马达606a;并且在第四位置618b中,开关614可以将公共控制模块610电耦合到例如第二关节运动马达606b。在某些情况下,单独的公共控制模块610可同时电耦合到击发马达602、闭合马达603和关节运动马达606a、606b。在某些情况下,开关614可为机械开关、机电开关、固态开关、或任何合适的开关机构。In at least one example, the
马达602、603、606a、606b中的每个可包括扭矩传感器以测量马达的轴上的输出扭矩。可以任何常规方式感测端部执行器上的力,诸如通过钳口的外侧上的力传感器或通过用于致动钳口的马达的扭矩传感器来感测端部执行器上的力。Each of the
在各种情况下,如图16中所示,公共控制模块610可包括马达驱动器626,该马达驱动器626可包括一个或多个H桥场效应FET。马达驱动器626可例如基于得自微控制器620(“控制器”)的输入来调节从功率源628发射到耦合到公共控制模块610的马达的电力。在某些情况下,当马达耦合到公共控制模块610时,可例如采用微控制器620来确定由马达消耗的电流,如上所述。In various cases, as shown in FIG. 16, the
在某些情况下,微控制器620可包括微处理器622(“处理器”)和一个或多个非暂态计算机可读介质或存储单元624(“存储器”)。在某些情况下,存储器624可存储各种程序指令,该各种程序指令在被执行时可使处理器622执行本文所述的多个功能和/或计算。在某些情况下,存储器单元624中的一个或多个可例如耦合到处理器622。In some cases,
在某些情况下,功率源628可例如用于为微控制器620供电。在某些情况下,功率源628可包括电池(或者“电池组”或“功率组”),诸如锂离子电池,例如。在某些情况下,电池组可被配置成能够可释放地安装到柄部以用于给外科器械600供电。可将多个串联连接的电池单元用作功率源628。在某些情况下,功率源628可为例如可替换的和/或可再充电的。In some cases,
在各种情况下,处理器622可控制马达驱动器626以控制耦合到公共控制器610的马达的位置、旋转方向、和/或速度。在某些情况下,处理器622可发信号通知马达驱动器626,以停止和/或停用耦合到公共控制器610的马达。应当理解,如本文所用的术语“处理器”包括任何合适的微处理器、微控制器、或将计算机的中央处理单元(CPU)的功能结合在一个集成电路或至多几个集成电路上的其它基础计算装置。处理器是多用途的可编程装置,该装置接收数字数据作为输入,根据其存储器中存储的指令来处理输入,然后提供结果作为输出。因为处理器具有内部存储器,所以是顺序数字逻辑的示例。处理器的操作对象是以二进制数字系统表示的数字和符号。In various cases,
在一个实例中,处理器622可为任何单核或多核处理器,诸如已知的由德克萨斯器械公司(Texas Instruments)生产的商品名为ARM Cortex的那些。在某些情况下,微控制器620例如可为购自德克萨斯器械公司(Texas Instruments)的LM 4F230H5QR。在至少一个示例中,Texas Instruments LM4F230H5QR为ARM Cortex-M4F处理器芯,其包括:256KB的单循环闪存或其它非易失性存储器(最多至40MHZ)的片上存储器、用于改善40MHz以上的性能的预取缓冲器、32KB的单循环SRAM、装载有
在某些情况下,存储器624可包括用于控制可耦合到公共控制器610的外科器械600的马达中的每个的程序指令。例如,存储器624可包括用于控制击发马达602、闭合马达603和关节运动马达606a、606b的程序指令。此类程序指令可使得处理器622根据来自外科器械或工具的算法或控制程序的输入来控制击发、闭合和关节运动功能。In some cases,
在某些情况下,一个或多个机构和/或传感器(诸如例如传感器630)可用于警示处理器622应当在特定设定中使用的程序指令。例如,传感器630可警示处理器622使用与击发、闭合和关节运动端部执行器相关联的程序指令。在某些情况下,传感器630可包括例如可用于感测开关614的位置的位置传感器。因此,处理器622可以在例如通过传感器630检测到开关614处于第一位置616时使用与击发端部执行器的I形梁相关联的程序指令;处理器622可以在例如通过传感器630检测到开关614处于第二位置617时使用与闭合砧座相关联的程序指令;并且处理器622可以在例如通过传感器630检测到开关614处于第三位置618a或第四位置618b时使用与使端部执行器进行关节运动相关联的程序指令。In some cases, one or more mechanisms and/or sensors (such as, for example, sensor 630) may be used to alert
图17是根据本公开的一个方面的被配置成能够操作本文所述的外科工具的机器人外科器械700的示意图。机器人外科器械700可被编程或配置成能够控制位移构件的远侧/近侧平移、闭合管的远侧/近侧位移、轴旋转、以及具有单个或多个关节运动驱动连杆的关节运动。在一个方面,外科器械700可被编程或配置成能够单独地控制击发构件、闭合构件、轴构件、和/或一个或多个关节运动构件。外科器械700包括控制电路710,该控制电路被配置成能够控制马达驱动的击发构件、闭合构件、轴构件、和/或一个或多个关节运动构件。17 is a schematic illustration of a robotic
在一个方面,机器人外科器械700包括控制电路710,该控制电路被配置成能够经由多个马达704a-704e来控制端部执行器702的砧座716和I形梁714(包括锋利切割刃)部分、可移除钉仓718、轴740、以及一个或多个关节运动构件742a、742b。位置传感器734可被配置成能够向控制电路710提供I形梁714的位置反馈。其它传感器738可被配置成能够向控制电路710提供反馈。定时器/计数器731向控制电路710提供定时和计数信息。可提供能量源712以操作马达704a-704e,并且电流传感器736向控制电路710提供马达电流反馈。马达704a-704e可通过控制电路710在开环或闭环反馈控制中单独操作。In one aspect, the robotic
在一个方面,控制电路710可包括用于执行使得一个或多个处理器执行一个或多个任务的指令的一个或多个微控制器、微处理器或其它合适的处理器。在一个方面,定时器/计数器731向控制电路710提供输出信号,诸如耗用时间或数字计数,以将如由位置传感器734确定的I形梁714的位置与定时器/计数器731的输出相关联,使得控制电路710可确定I形梁714在特定时间(t)相对于起始位置的位置或I形梁714在相对于起始位置的特定位置时的时间(t)。定时器/计数器731可被配置成能够测量所耗用的时间、对外部事件计数或对外部事件计时。In one aspect,
在一个方面,控制电路710可被编程为基于一个或多个组织状况来控制端部执行器702的功能。控制电路710可以被编程为直接或间接地感测组织状况,诸如厚度,如本文所述。控制电路710可以被编程为基于组织状况来选择击发控制程序或闭合控制程序。击发控制程序可以描述位移构件的远侧运动。可以选择不同的击发控制程序以更好地处理不同的组织状况。例如,当存在较厚的组织时,控制电路710可以被编程为以较低的速度和/或以较低的功率平移位移构件。当存在较薄的组织时,控制电路710可以被编程为以较高的速度和/或以较高的功率平移位移构件。闭合控制程序可控制由砧座716施加到组织的闭合力。其它控制程序控制轴740和关节运动构件742a、742b的旋转。In one aspect,
在一个方面,控制电路710可生成马达设定点信号。马达设定点信号可以被提供给各种马达控制器708a-708e。马达控制器708a-708e可以包括一个或多个电路,这些电路被配置成能够向马达704a-704e提供马达驱动信号,以驱动马达704a-704e,如本文所述。在一些示例中,马达704a-704e可为有刷DC电动马达。例如,马达704a-704e的速度可与相应的马达驱动信号成比例。在一些示例中,马达704a-704e可为无刷DC电动马达,并且相应的马达驱动信号可包括提供给马达704a-704e的一个或多个定子绕组的PWM信号。而且,在一些示例中,可以省略马达控制器708a-708e,并且控制电路710可以直接生成马达驱动信号。In one aspect, the
在一些示例中,控制电路710可以针对位移构件的行程的第一开环部分初始以开环配置操作马达704a-704e中的每个。基于在行程的开环部分期间机器人外科器械700的响应,控制电路710可以选择处于闭环配置的击发控制程序。器械的响应可以包括在开环部分期间位移构件的平移距离、在开环部分期间耗用的时间、在开环部分期间提供给马达704a-704e中的一者的能量、马达驱动信号的脉冲宽度之和等。在开环部分之后,控制电路710可以对位移构件行程的第二部分实现所选择的击发控制程序。例如,在行程的闭环部分期间,控制电路710可以基于以闭环方式描述位移构件的位置的平移数据来调制马达704a-704e中的一者,以使位移构件以恒定速度平移。In some examples, the
在一个方面,马达704a-704e可从能量源712接收电力。能量源712可为由主交流功率源、电池、超级电容器或任何其它合适的能量源驱动的DC功率源。马达704a-704e可经由相应的传动装置706a-706e机械地联接到单独的可移动机械元件,诸如I形梁714、砧座716、轴740、关节运动742a和关节运动742b。传动装置706a-706e可以包括一个或多个齿轮或其它连杆部件,以将马达704a-704e联接到可移动机械元件。位置传感器734可感测I形梁714的位置。位置传感器734可为或包括能够生成指示I形梁714的位置的位置数据的任何类型的传感器。在一些示例中,位置传感器734可包括编码器,该编码器被配置成能够在I形梁714朝远侧和朝近侧平移时向控制电路710提供一系列脉冲。控制电路710可跟踪脉冲以确定I形梁714的位置。可使用其它合适的位置传感器,包括例如接近传感器。其它类型的位置传感器可提供指示I形梁714的运动的其它信号。而且,在一些示例中,可省略位置传感器734。在马达704a-704e中的任一个是步进马达的情况下,控制电路710可以通过聚合马达704已被命令执行的步骤的数量和方向来跟踪I形梁714的位置。位置传感器734可位于端部执行器702中或器械的任何其它部分处。马达704a-704e中的每个的输出包括用于感测力的扭矩传感器744a-744e,并且具有用于感测驱动轴的旋转的编码器。In one aspect,
在一个方面,控制电路710被配置成能够驱动击发构件诸如端部执行器702的I形梁714部分。控制电路710向马达控制708a提供马达设定点,该马达控制向马达704a提供驱动信号。马达704a的输出轴耦合到扭矩传感器744a。扭矩传感器744a耦合到传动装置706a,该传动装置耦合到I形梁714。传动装置706a包括可移动机械元件诸如旋转元件和击发构件,以控制I形梁714沿端部执行器702的纵向轴线向远侧和向近侧的移动。在一个方面,马达704a可联接到刀齿轮组件,该刀齿轮组件包括刀齿轮减速组,该刀齿轮减速组包括第一刀驱动齿轮和第二刀驱动齿轮。扭矩传感器744a向控制电路710提供击发力反馈信号。击发力信号表示将I形梁714击发或移位所需的力。位置传感器734可被配置成能够将I形梁714沿击发行程的位置或击发构件的位置作为反馈信号提供给控制电路710。端部执行器702可包括被配置成能够向控制电路710提供反馈信号的附加传感器738。当准备好使用时,控制电路710可向马达控制708a提供击发信号。响应于击发信号,马达704a可沿端部执行器702的纵向轴线将击发构件从近侧行程开始位置朝远侧驱动至行程开始位置远侧的行程结束位置。在击发构件向远侧平移时,具有定位在远侧端部处的切割元件的I形梁714向远侧推进以切割位于钉仓718和砧座716之间的组织。In one aspect, the
在一个方面,控制电路710被配置成能够驱动闭合构件,诸如端部执行器702的砧座716部分。控制电路710向马达控制708b提供马达设定点,该马达控制708b向马达704b提供驱动信号。马达704b的输出轴耦合到扭矩传感器744b。扭矩传感器744b耦接到传动装置706b,该传动装置耦接到砧座716。传动装置706b包括可移动机械元件诸如旋转元件和闭合构件,以控制砧座716从打开位置和闭合位置的移动。在一个方面,马达704b联接到闭合齿轮组件,该闭合齿轮组件包括被支撑成与闭合正齿轮啮合接合的闭合减速齿轮组。扭矩传感器744b向控制电路710提供闭合力反馈信号。闭合力反馈信号表示施加到砧座716的闭合力。位置传感器734可被配置成能够将闭合构件的位置作为反馈信号提供给控制电路710。端部执行器702中的附加传感器738可向控制电路710提供闭合力反馈信号。可枢转砧座716与钉仓718相对地定位。当准备好使用时,控制电路710可向马达控制708b提供闭合信号。响应于闭合信号,马达704b推进闭合构件以抓握砧座716和钉仓718之间的组织。In one aspect, the
在一个方面,控制电路710被配置成能够使轴构件诸如轴740旋转,以使端部执行器702旋转。控制电路710向马达控制708c提供马达设定点,该马达控制708c向马达704c提供驱动信号。马达704c的输出轴耦合到扭矩传感器744c。扭矩传感器744c耦合到传动装置706c,该传动装置耦合到轴740。传动装置706c包括可移动机械元件诸如旋转元件,以控制轴740顺时针或逆时针旋转360°以上。在一个方面,马达704c联接到旋转传动装置组件,该旋转传动装置组件包括管齿轮区段,该管齿轮区段形成于(或附接到)近侧闭合管的近侧端部上,以通过可操作地支撑在工具安装板上的旋转齿轮组件可操作地接合。扭矩传感器744c向控制电路710提供旋转力反馈信号。旋转力反馈信号表示施加到轴740的旋转力。位置传感器734可被配置成能够将闭合构件的位置作为反馈信号提供给控制电路710。附加的传感器738诸如轴编码器可向控制电路710提供轴740的旋转位置。In one aspect, the
在一个方面,控制电路710被配置成能够使端部执行器702进行关节运动。控制电路710向马达控制708d提供马达设定点,该马达控制708d向马达704d提供驱动信号。马达704d的输出耦合到扭矩传感器744d。扭矩传感器744d耦合到传动装置706d,该传动装置耦合到关节运动构件742a。传动装置706d包括可移动的机械元件诸如关节运动元件,以控制端部执行器702±65°的关节运动。在一个方面,马达704d联接到关节运动螺母,该关节运动螺母可旋转地轴颈连接在远侧脊部的近侧端部部分上并且通过关节运动齿轮组件在其上可旋转地驱动。扭矩传感器744d向控制电路710提供关节运动力反馈信号。关节运动力反馈信号表示施加到端部执行器702的关节运动力。传感器738(诸如关节运动编码器)可向控制电路710提供端部执行器702的关节运动位置。In one aspect, the
在另一方面,机器人外科系统700的关节运动功能可包括两个关节运动构件或连杆742a、742b。这些关节运动构件742a、742b由机器人接口(齿条)上的单独的盘驱动,所述单独的盘由两个马达708d、708e驱动。当提供单独的击发马达704a时,关节运动连杆742a、742b中的每个可相对于另一个连杆进行拮抗驱动,以便在头部未运动时向头部提供阻力保持运动和负载,并且在头部进行关节运动时提供关节运动。当头部旋转时,关节运动构件742a、742b以固定的半径附接到头部。因此,当头部旋转时,推拉连杆的机械优点发生变化。机械优点的该变化对于其它关节运动连杆驱动系统可更明显。In another aspect, the articulation function of the robotic
在一个方面,一个或多个马达704a-704e可包括具有齿轮箱的有刷DC马达和与击发构件、闭合构件或关节运动构件的机械链路。另一个示例包括操作可移动机械元件诸如位移构件、关节运动连杆、闭合管和轴的电动马达704a-704e。外部影响是事物如组织、周围身体和摩擦对物理系统的未测量的、不可预测的影响。此类外部影响可被称为曳力,其相对电动马达704a-704e中的一个作用。外部影响诸如曳力可导致物理系统的操作偏离物理系统的期望操作。In one aspect, one or more of the
在一个方面,位置传感器734可被实现为绝对定位系统。在一个方面,位置传感器734可包括磁性旋转绝对定位系统,该磁性旋转绝对定位系统被实现为AS5055EQFT单片磁性旋转位置传感器,其购自Austria Microsystems(AG)。位置传感器734与控制电路710交接,以提供绝对定位系统。位置可包括位于磁体上方并耦合到CORDIC处理器的多个霍尔效应元件,该CORDIC处理器也被已知为逐位方法和Volder算法,提供该CORDIC处理器以实现用于计算双曲线函数和三角函数的简单有效的算法,双曲线函数和三角函数仅需要加法操作、减法操作、数位位移操作和表格查找操作。In one aspect, the
在一个方面,控制电路710可与一个或多个传感器738通信。传感器738可定位在端部执行器702上并且适于与机器人外科器械700一起操作以测量各种衍生参数,诸如间隙距离对时间、组织压缩与时间、以及砧座应变与时间。传感器738可包括磁性传感器、磁场传感器、应变仪、负荷传感器、压力传感器、力传感器、扭矩传感器、电感式传感器诸如涡流传感器、电阻式传感器、电容式传感器、光学传感器和/或用于测量端部执行器702的一个或多个参数的任何其它合适的传感器。传感器738可包括一个或多个传感器。传感器738可位于钉仓718平台上,以使用分段电极来确定组织位置。扭矩传感器744a-744e可被配置成能够感测力诸如击发力、闭合力和/或关节运动力等。因此,控制电路710可感测(1)远侧闭合管所经历的闭合负载及其位置,(2)在齿条处的击发构件及其位置,(3)钉仓718在其上具有组织的部分,以及(4)两个关节运动杆上的负载和位置。In one aspect, the
在一个方面,一个或多个传感器738可包括应变仪,诸如微应变仪,其被配置成能够在夹持条件期间测量砧座716中的应变的量值。应变仪提供电信号,该电信号的振幅随着应变量值而变化。传感器738可包括压力传感器,该压力传感器被配置成能够检测由砧座716和钉仓718之间的压缩组织的存在所生成的压力。传感器738可被配置成能够检测位于砧座716和钉仓718之间的组织区段的阻抗,该阻抗指示位于其间的组织的厚度和/或完全性。In one aspect, the one or
在一个方面,传感器738可实现为一个或多个限位开关、机电装置、固态开关、霍尔效应装置、磁阻(MR)装置、巨磁电阻(GMR)装置、磁力计等等。在其它具体实施中,传感器738可被实现为在光的影响下操作的固态开关,诸如光学传感器、IR传感器、紫外线传感器等等。同样,开关可为固态装置,诸如晶体管(例如,FET、结型FET、MOSFET、双极型晶体管等)。在其它具体实施中,传感器738可包括无电导体开关、超声开关、加速度计和惯性传感器等等。In one aspect,
在一个方面,传感器738可被配置成能够测量由闭合驱动系统施加在砧座716上的力。例如,一个或多个传感器738可位于闭合管和砧座716之间的交互点处,以检测由闭合管施加到砧座716的闭合力。施加在砧座716上的力可表示在砧座716和钉仓718之间捕集的组织区段所经历的组织压缩。一个或多个传感器738可沿闭合驱动系统定位在各种交互点处,以检测由闭合驱动系统施加到砧座716的闭合力。一个或多个传感器738可在夹持操作期间由控制电路710的处理器实时取样。控制电路710接收实时样本测量值以提供和分析基于时间的信息,并实时评估施加到砧座716的闭合力。In one aspect, the
在一个方面,电流传感器736可用于测量由马达704a-704e中的每个所消耗的电流。推进可移动机械元件(诸如I形梁714)中的任一者所需的力对应于由马达704a-704e中的一个所消耗的电流。将力转换成数字信号并将其提供给控制电路710。控制电路710可被配置成能够模拟器械的实际系统在控制器的软件中的响应。可致动位移构件以使端部执行器702中的I形梁714以目标速度或接近目标速度移动。机器人外科系统700可包括反馈控制器,该反馈控制器可为任何反馈控制器中的一者,包括但不限于例如PID、状态反馈、线性平方(LQR)和/或自适应控制器。机器人外科器械700可包括功率源,以例如将来自反馈控制器的信号转换成物理输入,诸如外壳电压、PWM电压、频率调制电压、电流、扭矩和/或力。附加细节公开于2017年6月29日提交的标题为用于机器人外科器械的闭环速度控制技术(CLOSED LOOP VELOCITY CONTROL TECHNIQUES FOR ROBOTIC SURGICAL INSTRUMENT)的美国专利申请序列号15/636,829中,该专利申请全文以引用方式并入本文。In one aspect, a current sensor 736 may be used to measure the current drawn by each of the
图18示出根据本公开的一个方面的被编程为控制位移构件的远侧平移的外科器械750的框图。在一个方面,外科器械750被编程为控制位移构件诸如I形梁764的远侧平移。外科器械750包括端部执行器752,该端部执行器可包括砧座766、I形梁764(包括锋利切割刃)和可移除钉仓768。18 shows a block diagram of a
线性位移构件诸如I形梁764的位置、移动、位移和/或平移可通过绝对定位系统、传感器布置和位置传感器784来测量。由于I形梁764联接到纵向可移动的驱动构件,因此I形梁764的位置可通过采用位置传感器784测量纵向可移动的驱动构件的位置来确定。因此,在以下描述中,I形梁764的位置、位移和/或平移可通过如本文所述的位置传感器784来实现。控制电路760可以被编程为控制位移构件诸如I形梁764的平移。在一些示例中,控制电路760可包括一个或多个微控制器、微处理器或其它合适的处理器,以用于执行使一个或多个处理器以所述方式控制位移构件(例如,I形梁764)的指令。在一个方面,定时器/计数器781向控制电路760提供输出信号,诸如耗用时间或数字计数,以将如由位置传感器784确定的I形梁764的位置与定时器/计数器781的输出相关联,使得控制电路760可确定I形梁764在特定时间(t)相对于起始位置的位置。定时器/计数器781可被配置成能够测量耗用时间、对外部事件计数或对外部事件计时。The position, movement, displacement and/or translation of a linear displacement member such as I-
控制电路760可生成马达设定点信号772。马达设定点信号772可被提供给马达控制器758。马达控制器758可包括一个或多个电路,该一个或多个电路被配置成能够向马达754提供马达驱动信号774,以驱动马达754,如本文所述。在一些示例中,马达754可为有刷DC电动马达。例如,马达754的速度可与马达驱动信号774成比例。在一些示例中,马达754可为无刷DC电动马达,并且马达驱动信号774可以包括提供给马达754的一个或多个定子绕组的PWM信号。而且,在一些示例中,可以省略马达控制器758,并且控制电路760可以直接生成马达驱动信号774。
马达754可从能量源762接收电力。能量源762可以是或包括电池、超级电容器或任何其它合适的能量源。马达754可经由传动装置756机械地联接到I形梁764。传动装置756可包括一个或多个齿轮或其它连杆部件,以将马达754联接到I形梁764。位置传感器784可感测I形梁764的位置。位置传感器784可以是或包括能够生成指示I形梁764的位置的位置数据的任何类型的传感器。在一些示例中,位置传感器784可包括编码器,该编码器被配置成能够在I形梁764朝远侧和朝近侧平移时向控制电路760提供一系列脉冲。控制电路760可跟踪脉冲以确定I形梁764的位置。可使用其它合适的位置传感器,包括例如接近传感器。其它类型的位置传感器可提供指示I形梁764的运动的其它信号。而且,在一些示例中,可省略位置传感器784。在马达754是步进马达的情况下,控制电路760可通过聚合马达754已被指示执行的步骤的数量和方向来跟踪I形梁764的位置。位置传感器784可位于端部执行器752中或器械的任何其它部分处。
控制电路760可与一个或多个传感器788通信。传感器788可定位在端部执行器752上并且适于与外科器械750一起操作以测量各种衍生参数,诸如间隙距离与时间、组织压缩与时间、以及砧座应变与时间。传感器788可包括磁性传感器、磁场传感器、应变仪、压力传感器、力传感器、电感式传感器诸如涡流传感器、电阻式传感器、电容式传感器、光学传感器和/或用于测量端部执行器752的一个或多个参数的任何其它合适的传感器。传感器788可包括一个或多个传感器。
一个或多个传感器788可包括应变仪,诸如微应变仪,其被配置成能够在夹持条件期间测量砧座766中的应变的量值。应变仪提供电信号,该电信号的振幅随着应变量值而变化。传感器788可包括压力传感器,该压力传感器被配置成能够检测由砧座766和钉仓768之间的压缩组织的存在所生成的压力。传感器788可被配置成能够检测位于砧座766和钉仓768之间的组织区段的阻抗,该阻抗指示位于其间的组织的厚度和/或完全性。The one or
传感器788可被配置成能够测量由闭合驱动系统施加在砧座766上的力。例如,一个或多个传感器788可位于闭合管和砧座766之间的交互点处,以检测由闭合管施加到砧座766的闭合力。施加在砧座766上的力可表示在砧座766和钉仓768之间捕集的组织区段所经受的组织压缩。一个或多个传感器788可沿闭合驱动系统定位在各种交互点处,以检测由闭合驱动系统施加到砧座766的闭合力。一个或多个传感器788可在夹持操作期间由控制电路760的处理器实时取样。控制电路760接收实时样本测量值以提供和分析基于时间的信息,并实时评估施加到砧座766的闭合力。
可采用电流传感器786来测量由马达754消耗的电流。推进I形梁764所需的力对应于由马达754消耗的电流。将力转换成数字信号并将其提供给控制电路760。A
控制电路760可被配置成能够模拟器械的实际系统在控制器的软件中的响应。可致动位移构件以使端部执行器752中的I形梁764以目标速度或接近目标速度运动。外科器械750可包括反馈控制器,该反馈控制器可为任何反馈控制器中的一者,包括但不限于例如PID、状态反馈、LQR和/或自适应控制器。外科器械750可包括功率源,以例如将来自反馈控制器的信号转换为物理输入,诸如外壳电压、PWM电压、频率调制电压、电流、扭矩和/或力。The
外科器械750的实际驱动系统被配置成能够通过具有齿轮箱和与关节运动和/或刀系统的机械链路的有刷DC马达来驱动位移构件、切割构件或I形梁764。另一示例为操作例如可互换轴组件的位移构件和关节运动驱动器的电动马达754。外部影响是事物如组织、周围身体和摩擦对物理系统的未测量的、不可预测的影响。这种外部影响可被称为相对电动马达754作用的曳力。外部影响诸如曳力可导致物理系统的操作偏离物理系统的期望操作。The actual drive system of the
各种示例性方面涉及外科器械750,其包括带有马达驱动的外科缝合和切割工具的端部执行器752。例如,马达754可沿端部执行器752的纵向轴线向远侧和向近侧驱动位移构件。端部执行器752可包括可枢转砧座766,并且当被配置用于使用时,钉仓768与砧座766相对定位。临床医生可抓握砧座766与钉仓768之间的组织,如本文所述。当准备好使用器械750时,临床医生可例如通过按下器械750的触发器来提供击发信号。响应于击发信号,马达754可沿端部执行器752的纵向轴线将位移构件从近侧行程开始位置向远侧驱动到行程开始位置远侧的行程结束位置。当位移构件向远侧平移时,带有定位在远侧端部处的切割元件的I形梁764可切割钉仓768和砧座766之间的组织。Various exemplary aspects relate to a
在各种示例中,外科器械750可包括控制电路760,该控制电路被编程用于基于一个或多个组织状况控制位移构件(诸如I形梁764)的远侧平移。控制电路760可被编程为直接或间接地感测组织状况,诸如厚度,如本文所述。控制电路760可被编程为基于组织状况来选择击发控制程序。击发控制程序可以描述位移构件的远侧运动。可以选择不同的击发控制程序以更好地处理不同的组织状况。例如,当存在较厚的组织时,控制电路760可以被编程为以较低的速度和/或以较低的功率平移位移构件。当存在较薄的组织时,控制电路760可以被编程为以较高的速度和/或以较高的功率平移位移构件。In various examples,
在一些示例中,控制电路760可针对位移构件的行程的第一开环部分初始以开环配置来操作马达754。基于在行程的开环部分期间器械750的响应,控制电路760可选择击发控制程序。器械的响应可以包括在开环部分期间位移构件的平移距离、在开环部分期间耗用的时间、在开环部分期间提供给马达754的能量、马达驱动信号的脉冲宽度之和等。在开环部分之后,控制电路760可以对位移构件行程的第二部分实现所选择的击发控制程序。例如,在行程的闭环部分期间,控制电路760可基于以闭环方式描述位移构件的位置的平移数据来调节马达754,以使位移构件以恒定速度平移。附加细节公开于2017年9月29日提交的标题为用于控制外科器械的显示器的系统和方法(SYSTEM AND METHODS FOR CONTROLLINGA DISPLAY OF A SURGICAL INSTRUMENT)的美国专利申请序列号15/720,852中,该专利申请全文以引用方式并入本文。In some examples, the
图19是根据本公开的一个方面的被配置成能够控制各种功能的外科器械790的示意图。在一个方面,外科器械790被编程为控制位移构件诸如I形梁764的远侧平移。外科器械790包括端部执行器792,该端部执行器可包括砧座766、I形梁764和可移除钉仓768,该可移除钉仓可以与RF仓796(以虚线示出)互换。19 is a schematic illustration of a
在一个方面,传感器788可被实现为限位开关、机电装置、固态开关、霍尔效应装置、MR装置、GMR装置、磁力计等等。在其它具体实施中,传感器638可被实现为在光的影响下操作的固态开关,诸如光学传感器、IR传感器、紫外线传感器等等。同样,开关可为固态装置,诸如晶体管(例如,FET、结型FET、MOSFET、双极型晶体管等)。在其它具体实施中,传感器788可包括无导体电开关、超声开关、加速度计和惯性传感器等。In one aspect, the
在一个方面,位置传感器784可被实现为绝对定位系统,该绝对定位系统包括被实现为AS5055EQFT单片磁性旋转位置传感器的磁性旋转绝对定位系统,其购自AustriaMicrosystems(AG)。位置传感器784与控制电路760交接,以提供绝对定位系统。位置可包括位于磁体上方并耦合到CORDIC处理器的多个霍尔效应元件,该CORDIC处理器也被已知为逐位方法和Volder算法,提供该CORDIC处理器以实现用于计算双曲线函数和三角函数的简单有效的算法,双曲线函数和三角函数仅需要加法操作、减法操作、数位位移操作和表格查找操作。In one aspect, the
在一个方面,I形梁764可被实现为包括刀主体的刀构件,该刀主体将组织切割刀片可操作地支撑在其上,并且该I形梁还可包括砧座接合插片或特征部和通道接合特征部或脚部。在一个方面,钉仓768可被实现为标准(机械)外科紧固件仓。在一个方面,RF仓796可被实现为RF仓。这些和其它传感器布置在2017年6月20日提交的标题为用于外科缝合和切割器械的马达速度的自适应控制的技术(TECHNIQUES FOR ADAPTIVE CONTROL OF MOTORVELOCITY OF A SURGICAL STAPLING AND CUTTING INSTRUMENT)的共同拥有的美国专利申请序列号15/628,175中有所描述,该专利申请全文以引用方式并入本文。In one aspect, the I-
线性位移构件诸如I形梁764的位置、运动、位移和/或平移可通过绝对定位系统、传感器布置和表示为位置传感器784的位置传感器来测量。由于I形梁764联接到纵向可移动的驱动构件,因此I形梁764的位置可通过采用位置传感器784测量纵向可移动的驱动构件的位置来确定。因此,在以下描述中,I形梁764的位置、位移和/或平移可通过如本文所述的位置传感器784来实现。控制电路760可以被编程为控制位移构件诸如I形梁764的平移,如本文所述。在一些示例中,控制电路760可包括一个或多个微控制器、微处理器或其它合适的处理器,以用于执行使一个或多个处理器以所述方式控制位移构件(例如,I形梁764)的指令。在一个方面,定时器/计数器781向控制电路760提供输出信号,诸如耗用时间或数字计数,以将如由位置传感器784确定的I形梁764的位置与定时器/计数器781的输出相关联,使得控制电路760可确定I形梁764在特定时间(t)相对于起始位置的位置。定时器/计数器781可被配置成能够测量耗用时间、对外部事件计数或对外部事件计时。The position, motion, displacement, and/or translation of a linear displacement member such as I-
控制电路760可生成马达设定点信号772。马达设定点信号772可被提供给马达控制器758。马达控制器758可包括一个或多个电路,该一个或多个电路被配置成能够向马达754提供马达驱动信号774,以驱动马达754,如本文所述。在一些示例中,马达754可为有刷DC电动马达。例如,马达754的速度可与马达驱动信号774成比例。在一些示例中,马达754可为无刷DC电动马达,并且马达驱动信号774可以包括提供给马达754的一个或多个定子绕组的PWM信号。而且,在一些示例中,可以省略马达控制器758,并且控制电路760可以直接生成马达驱动信号774。
马达754可从能量源762接收电力。能量源762可以是或包括电池、超级电容器或任何其它合适的能量源。马达754可经由传动装置756机械地联接到I形梁764。传动装置756可包括一个或多个齿轮或其它连杆部件,以将马达754联接到I形梁764。位置传感器784可感测I形梁764的位置。位置传感器784可以是或包括能够生成指示I形梁764的位置的位置数据的任何类型的传感器。在一些示例中,位置传感器784可包括编码器,该编码器被配置成能够在I形梁764朝远侧和朝近侧平移时向控制电路760提供一系列脉冲。控制电路760可跟踪脉冲以确定I形梁764的位置。可使用其它合适的位置传感器,包括例如接近传感器。其它类型的位置传感器可提供指示I形梁764的运动的其它信号。而且,在一些示例中,可省略位置传感器784。在马达754是步进马达的情况下,控制电路760可通过聚合马达已被指示执行的步骤的数量和方向来跟踪I形梁764的位置。位置传感器784可位于端部执行器792中或器械的任何其它部分处。
控制电路760可与一个或多个传感器788通信。传感器788可定位在端部执行器792上并且适于与外科器械790一起操作以测量各种衍生参数,诸如间隙距离与时间、组织压缩与时间、以及砧座应变与时间。传感器788可包括磁性传感器、磁场传感器、应变仪、压力传感器、力传感器、电感式传感器诸如涡流传感器、电阻式传感器、电容式传感器、光学传感器和/或用于测量端部执行器792的一个或多个参数的任何其它合适的传感器。传感器788可包括一个或多个传感器。
一个或多个传感器788可包括应变仪,诸如微应变仪,其被配置成能够在夹持条件期间测量砧座766中的应变的量值。应变仪提供电信号,该电信号的振幅随着应变量值而变化。传感器788可包括压力传感器,该压力传感器被配置成能够检测由砧座766和钉仓768之间的压缩组织的存在所生成的压力。传感器788可被配置成能够检测位于砧座766和钉仓768之间的组织区段的阻抗,该阻抗指示位于其间的组织的厚度和/或完全性。The one or
传感器788可被配置成能够测量由闭合驱动系统施加在砧座766上的力。例如,一个或多个传感器788可位于闭合管和砧座766之间的交互点处,以检测由闭合管施加到砧座766的闭合力。施加在砧座766上的力可表示在砧座766和钉仓768之间捕集的组织区段所经受的组织压缩。一个或多个传感器788可沿闭合驱动系统定位在各种交互点处,以检测由闭合驱动系统施加到砧座766的闭合力。一个或多个传感器788可在夹持操作期间由控制电路760的处理器部分实时采样。控制电路760接收实时样本测量值以提供和分析基于时间的信息,并实时评估施加到砧座766的闭合力。
可采用电流传感器786来测量由马达754消耗的电流。推进I形梁764所需的力对应于由马达754消耗的电流。将力转换成数字信号并将其提供给控制电路760。A
当RF仓796代替钉仓768被装载在端部执行器792中时,RF能量源794耦合到端部执行器792并且被施加到RF仓796。控制电路760控制RF能量到RF仓796的递送。When
附加细节公开于2017年6月28日提交的美国专利申请序列号15/636,096,其标题为可与钉仓和射频仓耦合的外科系统及其使用方法(SURGICAL SYSTEM COUPLABLE WITHSTAPLE CARTRIDGE AND RADIO FREQUENCY CARTRIDGE,AND METHOD OF USING SAME),该专利申请全文以引用方式并入本文。Additional details are disclosed in US Patent Application Serial No. 15/636,096, filed June 28, 2017, entitled SURGICAL SYSTEM COUPLABLE WITHSTAPLE CARTRIDGE AND RADIO FREQUENCY CARTRIDGE, AND METHOD OF USING SAME), which is incorporated herein by reference in its entirety.
图20是被配置成能够除其它益处之外还提供无电感器调谐的发生器800的简化框图。发生器800的附加细节在2015年6月23日公布的标题为用于超声和电外科装置的外科发生器(SURGICAL GENERATOR FOR ULTRASONIC AND ELECTROSURGICAL DEVICES)的美国专利9,060,775中有所描述,该专利全文以引用方式并入本文。发生器800可包括患者隔离级802,该患者隔离级经由电力变压器806与非隔离级804通信。电力变压器806的二次绕组808包含在隔离级802中,并且可包括分接配置(例如,中心分接或非中心分接配置)以限定驱动信号输出810a,810b,810c,该驱动信号输出用于将驱动信号递送至不同的外科器械,诸如例如超声外科器械、RF电外科器械和包括能够单独或同时递送的超声能量模式和RF能量模式的多功能外科器械。具体而言,驱动信号输出810a、810c可将超声驱动信号(例如,420V均方根(RMS)驱动信号)输出至超声外科器械,且驱动信号输出810a、810c可将RF电外科驱动信号(例如,100V RMS驱动信号)输出至RF电外科器械,其中驱动信号输出810b对应于电力变压器806的中心抽头。20 is a simplified block diagram of a
在某些形式中,超声驱动信号和电外科驱动信号可同时提供至不同的外科器械和/或具有将超声能量和电外科能量两者递送至组织的能力的单个外科器械诸如多功能外科器械。应当理解,提供给专用电外科器械和/或组合的多功能超声/电外科器械的电外科信号可以是治疗或亚治疗电平信号,其中亚治疗信号可用于例如监测组织或器械状况并向发生器提供反馈。例如,超声信号和RF信号可从具有单个输出端口的发生器单独地或同时递送,以便向外科器械提供期望的输出信号,如将在下文更详细地讨论。因此,发生器可组合超声能量和电外科RF能量并且将组合的能量递送到多功能超声/电外科器械。双极电极可被放置在端部执行器的一个或两个钳口上。除了电外科RF能量之外,一个钳口可由超声能量同时驱动。超声能量可用于解剖组织,而电外科RF能量可用于脉管密封。In some forms, the ultrasonic drive signal and the electrosurgical drive signal may be provided simultaneously to different surgical instruments and/or a single surgical instrument, such as a multifunctional surgical instrument, having the ability to deliver both ultrasonic and electrosurgical energy to tissue. It should be understood that the electrosurgical signals provided to the dedicated electrosurgical instrument and/or the combined multifunctional ultrasonic/electrosurgical instrument may be therapeutic or sub-therapeutic level signals, where the sub-therapeutic signals may be used, for example, to monitor tissue or instrument condition and provide to provide feedback. For example, ultrasound signals and RF signals may be delivered separately or simultaneously from a generator having a single output port to provide a desired output signal to a surgical instrument, as will be discussed in more detail below. Thus, the generator can combine ultrasonic energy and electrosurgical RF energy and deliver the combined energy to a multifunctional ultrasonic/electrosurgical instrument. Bipolar electrodes can be placed on one or both jaws of the end effector. In addition to electrosurgical RF energy, one jaw can be driven simultaneously by ultrasonic energy. Ultrasound energy can be used to dissect tissue, while electrosurgical RF energy can be used to seal vessels.
非隔离级804可包括功率放大器812,该功率放大器812具有连接到电力变压器806的初级绕组814的输出。在某些形式中,功率放大器812可包括推挽放大器。例如,非隔离级804还可包括逻辑装置816,该逻辑装置816用于向数模转换器(DAC)电路818供应数字输出,而该数模转换器(DAC)电路818继而将对应的模拟信号供应至功率放大器812的输入。在某些形式中,例如除其它逻辑电路之外,逻辑装置816可包括可编程门阵列(PGA)、FPGA、可编程逻辑装置(PLD)。因此,通过经由DAC电路818控制功率放大器812的输入,逻辑装置816可控制在驱动信号输出810a、810b、810c处出现的驱动信号的多个参数(例如,频率、波形形状、波形振幅)中的任一者。在某些形式中并且如下所述,逻辑装置816结合处理器(例如,以下所述的DSP)可实现多个基于DSP的算法和/或其它控制算法,以控制发生器800所输出的驱动信号的参数。The
可通过开关模式调整器820(例如,功率转换器)将功率供应至功率放大器812的功率轨。在某些形式中,开关模式调节器820例如可包括可调式降压调节器。例如,非隔离级804还可包括第一处理器822,在一种形式中,该第一处理器可包括DSP处理器,诸如购自Analog Devices(Norwood,MA)的Analog Devices ADSP-21469 SHARC DSP,但可在各种形式中采用任何合适的处理器。在某些形式中,DSP处理器822可响应于由DSP处理器822经由ADC电路824从功率放大器812接收的电压反馈数据来控制对开关模式调节器820的操作。在一种形式中,例如,DSP处理器822可经由ADC电路824作为输入接收由功率放大器812放大的信号(例如,RF信号)的波形包络。随后,DSP处理器822可控制开关模式调节器820(例如,经由PWM输出),使得被供应至功率放大器812的干线电压跟踪放大的信号的波形包络。通过基于波形包络动态调制功率放大器812的干线电压,功率放大器812的效率相对于固定干线电压放大器方案可显著提高。Power may be supplied to the power rails of the
在某些形式中,逻辑装置816结合DSP处理器822可实现数字合成电路诸如直接数字合成器控制方案,以控制发生器800所输出的驱动信号的波形形状、频率和/或振幅。在一种形式中,例如逻辑装置816可通过召回存储于动态更新的查找表(LUT)(诸如RAM LUT)中的波形样本来实现DDS控制算法,该动态更新的查找表可被嵌入在FPGA中。此控制算法尤其可用于如下超声应用,其中超声换能器诸如超声换能器可由其谐振频率下的纯正弦式电流驱动。因为其它频率可激发寄生谐振,因此最小化或降低动态支路电流的总失真可相应地最小化或降低不利的谐振效应。因为发生器800所输出的驱动信号的波形形状受输出驱动电路(例如,电力变压器806、功率放大器812)中所存在的各种畸变源的影响,所以基于驱动信号的电压和电流反馈数据可被输入至算法(诸如由DSP处理器822实现的误差控制算法)中,该算法通过适当地以动态行进方式(例如,实时)使存储于LUT中的波形样本预先畸变或修改来补偿畸变。在一种形式中,对LUT样本所施加的预先畸变量或程度可根据所计算的动态支路电流与期望的电流波形形状之间的误差而定,其中所述误差可基于逐一样本确定。以该方式,预先失真的LUT样本在通过驱动电路进行处理时,可使动态支路驱动信号具有所期望的波形形状(例如,正弦形状),以最佳地驱动超声换能器。因此,在此类形式中,当考虑到畸变效应时,LUT波形样本将不呈现驱动信号的期望波形形状,而是呈现要求最终产生动态支路驱动信号的期望波形形状的波形形状。In some forms,
非隔离级804还可包括第一ADC电路826和第二ADC电路828,该第一ADC电路826和第二ADC电路828经由相应的隔离变压器830、832耦合到电力变压器806的输出,以分别用于对由发生器800输出的驱动信号的电压和电流进行采样。在某些形式中,ADC电路826、828可被配置成能够以高速(例如,80每秒百万次采样(MSPS))进行采样,以实现对驱动信号进行过采样。在一种形式中,例如ADC电路826、828的采样速度可实现驱动信号的约200x(根据频率而定)的过采样。在某些形式中,可通过使单个ADC电路经由二路式多路复用器接收输入电压和电流信号来执行ADC电路826、828的采样操作。通过在发生器800的形式中使用高速采样,除可实现其它事物之外,还可实现对流过动态支路的复杂电流的计算(这在某些形式中可用于实现上述基于DDS的波形形状控制)、对采样信号进行精确的数字滤波、以及以高精度计算实际功耗。ADC电路826、828所输出的电压和电流反馈数据可由逻辑装置816接收并处理(例如,先进先出(FIFO)缓冲器、多路复用器)并被存储于数据存储器中,以供例如DSP处理器822后续取回。如上所述,电压和电流反馈数据可用作算法的输入用于以动态行进方式使LUT波形样本预先失真或修改。在某些形式中,当采集了电压和电流反馈数据对时,可能需要基于由逻辑装置816输出的对应LUT样本或以其它方式与该对应LUT样本相关联,为每一所存储的电压和电流反馈数据对编索引。以此方式使LUT样本和电压和电流反馈数据同步有助于预失真算法的准确计时和稳定性。The
在某些形式中,可使用电压和电流反馈数据来控制驱动信号的频率和/或振幅(例如,电流振幅)。在一种形式中,例如,可使用电压和电流反馈数据来确定阻抗相位。随后,可控制驱动信号的频率以最小化或减小所确定阻抗相位与阻抗相位设定点(例如,0°)之间的差值,从而最小化或减小谐波畸变的影响,并相应地提高阻抗相位测量精确度。相位阻抗和频率控制信号的确定可在DSP处理器822中实现,例如,其中频率控制信号作为输入被供应至逻辑装置816所实现的DDS控制算法。In some forms, voltage and current feedback data may be used to control the frequency and/or amplitude (eg, current amplitude) of the drive signal. In one form, for example, voltage and current feedback data may be used to determine impedance phase. Subsequently, the frequency of the drive signal can be controlled to minimize or reduce the difference between the determined impedance phase and the impedance phase set point (eg, 0°), thereby minimizing or reducing the effects of harmonic distortion, and accordingly to improve impedance phase measurement accuracy. The determination of the phase impedance and the frequency control signal may be implemented in the
在另一形式中,例如可监视电流反馈数据,以便将驱动信号的电流振幅保持在电流振幅设定点。电流振幅设定点可被直接指定或基于特定的电压振幅和功率设定点而间接地确定。在某些形式中,可通过DSP处理器822中的控制算法(诸如例如,比例积分微分(PID)控制算法)来实现对电流振幅的控制。控制算法为了适当控制驱动信号的电流振幅而控制的变量可包括例如:存储在逻辑装置816中的LUT波形样本的定标和/或经由DAC电路834的DAC电路818(其向功率放大器812供应输入)的全标度输出电压。In another form, for example, current feedback data may be monitored in order to maintain the current amplitude of the drive signal at the current amplitude set point. The current amplitude setpoint may be specified directly or determined indirectly based on specific voltage amplitude and power setpoints. In some forms, control of the current amplitude may be accomplished by a control algorithm in the
非隔离级804还可包括第二处理器836,以用于除其它事物之外还提供用户界面(UI)功能。在一种形式中,UI处理器836可包括例如购自Atmel Corporation(San Jose,California)的具有ARM 926EJ-S核的Atmel AT91SAM9263处理器。UI处理器836所支持的UI功能的示例可包括听觉和视觉用户反馈、与外围装置(例如,经由USB接口)的通信、与脚踏开关的通信、与输入装置(例如,触摸屏显示器)的通信、以及与输出装置(例如,扬声器)的通信。UI处理器836可(例如,经由SPI总线)与DSP处理器822和逻辑装置816通信。尽管UI处理器836可主要支持UI功能,然而在某些形式中,其也可与DSP处理器822配合以减缓风险。例如,UI处理器836可被编程为监测用户输入和/或其它输入(例如,触摸屏输入、脚踏开关输入、温度传感器输入)的各个方面,并且可在检测到错误状况时停用发生器800的驱动输出。The
在某些形式中,例如DSP处理器822和UI处理器836两者可确定并监测发生器800的操作状态。对于DSP处理器822,发生器800的操作状态例如可指示DSP处理器822实现的是哪些控制和/或诊断过程。对于UI处理器836,发生器800的操作状态例如可指示为用户呈现UI的哪些元素(例如,显示屏、声音)。相应的DSP处理器822和UI处理器836可独立地保持发生器800的当前操作状态并识别和评估当前操作状态的可能转变。DSP处理器822可用作此关系中的主体并确定何时会发生操作状态间的转变。UI处理器836可注意到操作状态间的有效转变并可确认特定的转变是否适当。例如,当DSP处理器822命令UI处理器836转变至特定状态时,UI处理器836可证实所要求的转变是有效的。如果UI处理器836确定所要求的状态间转变是无效的,则UI处理器836可使发生器800进入失效模式。In some forms, for example, both the
非隔离级804还可包括控制器838,以用于监测输入装置(例如,用于接通和断开发生器800的电容触摸传感器、电容触摸屏)。在某些形式中,控制器838可包括至少一个处理器和/或与UI处理器836通信的其它控制装置。在一种形式中,例如控制器838可包括处理器(例如,购自Atmel的Mega168 8位控制器),该处理器被配置成能够监测经由一个或多个电容触摸传感器提供的用户输入。在一种形式中,控制器838可包括触摸屏控制器(例如购自Atmel的QT5480触摸屏控制器),以控制和管理从电容触摸屏对触摸数据的采集。The
在某些形式中,当发生器800处于“功率关”状态时,控制器838可继续接收操作功率(例如,经由来自发生器800的功率源的线,诸如以下所述的功率源854)。以此方式,控制器838可继续监测输入装置(例如,位于发生器800的前面板上的电容触摸传感器),以用于接通和断开发生器800。当发生器800处于功率关状态时,如果检测到用户激活“接通/断开”输入装置,则控制器838可唤醒功率源(例如,启用功率源854的一个或多个DC/DC电压转换器856的操作)。控制器838可因此开始使发生器800转变至“功率开”状态的序列。相反,当发生器800处于功率开状态时,如果检测到“接通/断开”输入装置的激活,则控制器838可开始使发生器800转变至功率关状态的序列。在某些形式中,例如,控制器838可向UI处理器836报告“接通/断开”输入装置的激活,该处理器继而实现所需的过程序列以使发生器800转变至功率关状态。在此类形式中,控制器838可能不具有在建立起功率开状态之后从发生器800去除功率的独立能力。In some forms, when
在某些形式中,控制器838可使发生器800提供听觉或其它感观反馈,以警示用户功率开或功率关序列已开始。可在功率开或功率关序列开始时以及在与序列相关联的其它过程开始之前提供此类警示。In some forms, the
在某些形式中,隔离级802可包括器械接口电路840,例如以在外科器械的控制电路(例如,包括手持件开关的控制电路)和非隔离级804的部件(诸如例如,逻辑装置816、DSP处理器822和/或UI处理器836)之间提供通信接口。器械接口电路840可经由保持隔离级802和非隔离级804之间的合适的电气隔离程度的通信链路(诸如例如,基于IR的通信链路)与非隔离级804的部件交换信息。例如,可使用由隔离变压器供电的低压降电压调整器为器械接口电路840供应电力,该低压降电压调整器从非隔离级804被驱动。In some forms,
在一种形式中,器械接口电路840可包括与信号调节电路844通信的逻辑电路842(例如,逻辑电路、可编程逻辑电路、PGA、FPGA、PLD)。信号调节电路844可被配置成能够从逻辑电路842接收周期性信号(例如,2kHz的方波),以生成具有相同频率的双极性询问信号。例如,可使用由差分放大器馈送的双极电流源生成询问信号。询问信号可被发送至外科器械控制电路(例如,通过使用将发生器800连接到外科器械的缆线中的导电对)并被监测,以确定控制电路的状态或配置。控制电路可包括多个开关、电阻器和/或二极管,以修改询问信号的一个或多个特性(例如,振幅、校正),使得可基于一个或多个特性唯一地辨别控制电路的状态或配置。在一种形式中,例如信号调节电路844可包括ADC电路,以用于产生由于询问信号通过控制电路而出现在控制电路输入中的电压信号的样本。随后,逻辑电路842(或非隔离级804的部件)可基于ADC电路样本来确定控制电路的状态或配置。In one form, instrument interface circuitry 840 may include logic circuitry 842 (eg, logic circuitry, programmable logic circuitry, PGA, FPGA, PLD) in communication with signal conditioning circuitry 844 . Signal conditioning circuit 844 may be configured to receive a periodic signal (eg, a 2 kHz square wave) from logic circuit 842 to generate a bipolar interrogation signal having the same frequency. For example, the interrogation signal can be generated using a bipolar current source fed by a differential amplifier. The interrogation signal may be sent to the surgical instrument control circuit (eg, by using conductive pairs in a cable connecting the
在一种形式中,器械接口电路840可包括第一数据电路接口846,以实现逻辑电路842(或器械接口电路840的其它元件)与设置于外科装置中的或换句话讲与外科器械相关联的第一数据电路之间的信息交换。在某些形式中,例如,第一数据电路可设置于整体地附接到外科器械手持件的缆线中,或设置于用于使特定的外科器械类型或模型与发生器800交接的适配器中。第一数据电路可以任何合适的方式实现且可根据包括(例如)本文关于第一数据电路所述的任何合适的协议与发生器通信。在某些形式中,第一数据电路可包括非易失性存储装置,诸如EEPROM装置。在某些形式中,第一数据电路接口846可与逻辑电路842分开地实现并包括合适的电路(例如,离散的逻辑装置、处理器),以实现逻辑电路842和第一数据电路之间的通信。在其它形式中,第一数据电路接口846可与逻辑电路842形成一体。In one form, the instrument interface circuit 840 may include a first data circuit interface 846 to implement the logic circuit 842 (or other elements of the instrument interface circuit 840) associated with a surgical instrument disposed in a surgical device or otherwise associated with a surgical instrument information exchange between the connected first data circuits. In some forms, for example, the first data circuit may be provided in a cable integrally attached to the surgical instrument handpiece, or in an adapter for interfacing a particular surgical instrument type or model with the
在某些形式中,第一数据电路可存储与相关联的特定外科器械相关的信息。此类信息可包括例如型号、序列号、其中已使用外科器械的多个操作、和/或任何其它类型的信息。此种信息可被器械接口电路840(例如,通过逻辑电路842)读取、被传输至非隔离级804的部件(例如,至逻辑装置816、DSP处理器822和/或UI处理器836),以经由输出装置呈现给用户和/或控制发生器800的功能或操作。另外,任何类型的信息均可经由第一数据电路接口846(例如,使用逻辑电路842)被发送至第一数据电路以存储于其中。此类信息例如可包括其中使用外科器械的操作的更新数量和/或其使用的日期和/或时间。In some forms, the first data circuit may store information related to an associated particular surgical instrument. Such information may include, for example, model number, serial number, multiple operations in which the surgical instrument has been used, and/or any other type of information. Such information may be read by instrument interface circuitry 840 (eg, via logic circuitry 842), communicated to components of non-isolated stage 804 (eg, to
如在前所讨论,外科器械可从手持件拆卸(例如,多功能外科器械可从手持件拆卸)以促进器械可互换性和/或处置性。在此类情形中,常规发生器的识别所使用特定器械配置和相应地优化控制和诊断过程的能力可受限。然而,从兼容性角度来看,通过对外科器械添加可读数据电路来解决此问题是有问题的。例如,设计外科器械来保持与缺少必备数据读取功能的发生器的向后兼容可能由于例如不同的信号方案、设计复杂性和成本而不切实际。本文所述器械的形式通过使用数据电路来解决这些问题,这些数据电路可经济地实现于现有外科器械中并具有最小的设计变化,以保持外科器械与电流发生器平台的兼容性。As previously discussed, surgical instruments may be detachable from the handpiece (eg, a multifunctional surgical instrument may be detachable from the handpiece) to facilitate instrument interchangeability and/or disposability. In such situations, the ability of conventional generators to identify the specific instrument configuration used and optimize control and diagnostic procedures accordingly may be limited. However, solving this problem by adding readable data circuitry to the surgical instrument is problematic from a compatibility standpoint. For example, designing a surgical instrument to maintain backward compatibility with generators that lack the requisite data reading capabilities may be impractical due to, for example, different signal schemes, design complexity, and cost. The form of the instrument described herein addresses these issues by using data circuits that can be economically implemented in existing surgical instruments with minimal design changes to maintain the compatibility of the surgical instrument with the current generator platform.
另外,发生器800的形式可实现与基于器械的数据电路的通信。例如,发生器800可被配置成能够与器械(例如,多功能外科器械)中所包含的第二数据电路进行通信。在一些形式中,第二数据电路可以类似于本文所述的第一数据电路的方式实现。器械接口电路840可包括用于实现此通信的第二数据电路接口848。在一种形式中,第二数据电路接口848可包括三态数字接口,然而也可使用其它接口。在某些形式中,第二数据电路通常可为用于传输和/或接收数据的任何电路。在一种形式中,例如第二数据电路可存储与相关联的特定外科器械相关的信息。此类信息可包括例如型号、序列号、其中已使用外科器械的多个操作、和/或任何其它类型的信息。Additionally, the form of
在一些形式中,第二数据电路可存储关于相关联的超声换能器、端部执行器或超声驱动系统的电特性和/或超声特性的信息。例如,第一数据电路可指示老化频率斜率,如本文所述。附加地或另选地,任何类型的信息均可经由第二数据电路接口848(例如,使用逻辑电路842)被发送至第二数据电路以存储于其中。此类信息例如可包括其中使用外科器械的操作的更新数目和/或其使用的日期和/或时间。在某些形式中,第二数据电路可传输由一个或多个传感器(例如,基于器械的温度传感器)采集的数据。在某些形式中,第二数据电路可从发生器800接收数据并基于所接收的数据向用户提供指示(例如,发光二极管指示或其它可见指示)。In some forms, the second data circuit may store information regarding electrical and/or ultrasonic properties of the associated ultrasonic transducer, end effector, or ultrasonic drive system. For example, the first data circuit may indicate an aging frequency slope, as described herein. Additionally or alternatively, any type of information may be sent to the second data circuit via the second data circuit interface 848 (eg, using the logic circuit 842 ) for storage therein. Such information may include, for example, an updated number of operations in which the surgical instrument was used and/or the date and/or time of its use. In some forms, the second data circuit may transmit data collected by one or more sensors (eg, instrument-based temperature sensors). In some forms, the second data circuit may receive data from the
在某些形式中,第二数据电路和第二数据电路接口848可被配置成使得可实现逻辑电路842和第二数据电路之间的通信而无需为此提供附加的导体(例如,将手持件连接至发生器800的缆线的专用导体)。在一种形式中,例如,可使用实现于现有缆线上的单总线通信方案(诸如用于将询问信号从信号调节电路844发射至手持件中的控制电路的导体中的一者)而将信息发送至第二数据电路并从第二数据电路发送信息。以此方式,可最小化或减少原本可能必要的外科器械的设计变化或修改。此外,因为在共用物理通道上实现的不同类型的通信可为频带分离的,所以第二数据电路的存在对于不具有必备数据读取功能的发生器而言可为“隐形的”,因此能够实现外科器械的向后兼容性。In some forms, the second data circuit and the second
在某些形式中,隔离级802可包括至少一个阻挡电容器850-1,该至少一个阻挡电容器850-1连接到驱动信号输出810b以防止DC电流流向患者。例如,可要求信号阻挡电容器符合医疗规则或标准。尽管相对而言单电容器设计中很少出现失效,然而此类失效可造成不良后果。在一种形式中,可设置有与阻挡电容器850-1串联的第二阻挡电容器850-2,其中例如通过ADC电路852来监测从阻挡电容器850-1和850-2之间的点发生的电流泄漏,以对泄漏电流所感应的电压进行采样。这些样本例如可由逻辑电路842接收。基于泄漏电流的变化(如由电压样本所指示的),发生器800可以确定阻挡电容器850-1、850-2中的至少一个何时失效,因此提供优于具有单个失效点的单电容器设计的益处。In some forms,
在某些形式中,非隔离级804可包括功率源854,以用于在合适的电压和电流下递送DC功率。功率源可包括例如400W的功率源,以用于递送48V的DC系统电压。功率源854还可包括一个或多个DC/DC电压转换器856,以用于接收功率源的输出,以在发生器800的各种部件所需的电压和电流下产生DC输出。如以上结合控制器838所述,当控制器838检测到用户激活“接通/断开”输入装置以启用DC/DC电压转换器856的操作或唤醒DC/DC电压转换器856时,DC/DC电压转换器856中的一个或多个可从控制器838接收输入。In some forms, the
图21示出了发生器900的示例,该发生器是发生器800(图20)的一种形式。发生器900被配置成能够将多个能量模态递送至外科器械。发生器900提供用于独立地或同时将能量递送至外科器械的RF信号和超声信号。RF信号和超声信号可单独或组合提供,并且可同时提供。如上所述,至少一个发生器输出可通过单个端口递送多种能量模态(例如,超声、双极或单极RF、不可逆和/或可逆电穿孔和/或微波能量等等),并且这些信号可分开或同时被递送到端部执行器以处理组织。FIG. 21 shows an example of
发生器900包括耦合到波形发生器904的处理器902。处理器902和波形发生器904被配置成能够基于存储在耦合到处理器902的存储器中的信息来生成各种信号波形,为了本公开清楚起见而未示出该存储器。与波形相关联的数字信息被提供给波形发生器904,该波形发生器904包括一个或多个DAC电路以将数字输入转换成模拟输出。模拟输出被馈送到放大器1106用于信号调节和放大。放大器906的经调节和放大的输出耦合到电力变压器908。信号通过电力变压器908耦合到患者隔离侧中的次级侧。第一能量模态的第一信号被提供给被标记为ENERGY1和RETURN的端子之间的外科器械。第二能量模态的第二信号耦合到电容器910两端并被提供给被标记为ENERGY2和RETURN的端子之间的外科器械。应当理解,可输出超过两种能量模态,并且因此下标“n”可被用来指定可提供多至n个ENERGYn端子,其中n是大于1的正整数。还应当理解,在不脱离本公开的范围的情况下,可提供多至“n”个返回路径RETURNn。
第一电压感测电路912耦合到被标记为ENERGY1和RETURN路径的端子的两端,以测量其间的输出电压。第二电压感测电路924耦合到被标记为ENERGY2和RETURN路径的端子的两端,以测量其间的输出电压。如图所示,电流感测电路914与电力变压器908的次级侧的RETURN支路串联设置,以测量任一能量模态的输出电流。如果为每种能量模态提供不同的返回路径,则应在每个返回支路中提供单独的电流感测电路。第一电压感测电路912和第二电压感测电路924的输出被提供给相应的隔离变压器916、922,并且电流感测电路914的输出被提供给另一隔离变压器918。电力变压器908(非患者隔离侧)的初级侧上的隔离变压器916、928、922的输出被提供给一个或多个ADC电路926。ADC电路926的数字化输出被提供给处理器902用于进一步处理和计算。可采用输出电压和输出电流反馈信息来调整提供给外科器械的输出电压和电流,并且计算输出阻抗等参数。处理器902和患者隔离电路之间的输入/输出通信通过接口电路920提供。传感器也可通过接口920与处理器902电气通信。A first
在一个方面,阻抗可由处理器902通过将耦合在被标记为ENERGY1/RETURN的端子两端的第一电压感测电路912或耦合在被标记为ENERGY2/RETURN的端子两端的第二电压感测电路924的输出除以与电力变压器908的次级侧的RETURN支路串联设置的电流感测电路914的输出来确定。第一电压感测电路912和第二电压感测电路924的输出被提供给单独的隔离变压器916、922,并且电流感测电路914的输出被提供给另一隔离变压器916。来自ADC电路926的数字化电压和电流感测测量值被提供给处理器902以用于计算阻抗。例如,第一能量模态ENERGY1可为超声能量,并且第二能量模态ENERGY2可为RF能量。然而,除了超声和双极或单极RF能量模态之外,其它能量模态还包括不可逆和/或可逆电穿孔和/或微波能量等。而且,虽然图21所示的示例示出了可为两种或更多种能量模态提供单个返回路径RETURN,但在其它方面,可为每种能量模态ENERGYn提供多个返回路径RETURNn。因此,如本文所述,超声换能器阻抗可通过将第一电压感测电路912的输出除以电流感测电路914的输出来测量,并且组织阻抗可通过将第二电压感测电路924的输出除以电流感测电路914的输出来测量。In one aspect, the impedance can be sensed by the
如图21中所示,包括至少一个输出端口的发生器900可包括具有单个输出和多个分接头的电力变压器908,以例如根据正在执行的组织处理类型以一种或多种能量模态(诸如超声、双极或单极RF、不可逆和/或可逆电穿孔和/或微波能量等等)的形式向端部执行器提供功率。例如,发生器900可用较高电压和较低电流递送能量以驱动超声换能器,用较低电压和较高电流递送能量以驱动RF电极以用于密封组织,或者用凝固波形递送能量以用于使用单极或双极RF电外科电极。来自发生器900的输出波形可被操纵、切换或滤波,以向外科器械的端部执行器提供频率。超声换能器与发生器900输出的连接将优选地位于被标记为ENERGY1和RETURN的输出之间,如图21中所示。在一个示例中,RF双极电极与发生器900输出的连接将优选地位于被标记为ENERGY2和RETURN的输出之间。在单极输出的情况下,优选的连接将是有源电极(例如,光锥(pencil)或其它探头)到ENERGY2输出的和连接至RETURN输出的合适的返回垫。As shown in FIG. 21 , a
附加细节公开于2017年3月30日公布的标题为用于操作用于数字地生成电信号波形的发生器和外壳器械的技术(TECHNIQUES FOR OPERATING GENERATOR FOR DIGITALLYGENERATING ELECTRICAL SIGNAL WAVEFORMS AND SURGICAL INSTRUMENTS)的美国专利申请公布2017/0086914中,该专利申请全文以引用方式并入本文。Additional details are disclosed in US Patent TECHNIQUES FOR OPERATING GENERATOR FOR DIGITALLYGENERATING ELECTRICAL SIGNAL WAVEFORMS AND SURGICAL INSTRUMENTS, issued March 30, 2017, entitled TECHNIQUES FOR OPERATING GENERATOR FOR DIGITALLYGENERATING ELECTRICAL SIGNAL WAVEFORMS AND SURGICAL INSTRUMENTS In Application Publication 2017/0086914, the entirety of this patent application is incorporated herein by reference.
图22示出了根据本公开的至少一个方面的电外科系统60000。电外科系统60000包括发生器60002、电外科器械60004和返回垫60006。发生器60002经由第一导体/电缆60008将射频水平的交流电供应至电外科器械60004。电外科器械60004包括可定位在患者的目标组织处的电极尖端(即,有源电极)。电外科器械60004从发生器60002接收交流电并且经由电极尖端将交流电递送至患者60010的目标组织。该交流电在目标组织处被接收,并且来自组织的电阻产生热量,该热量在外科部位处提供期望的效果(例如,密封和/或切割)。交流电传导通过患者身体,并且最终由返回垫60006接收。由返回垫60006接收的交流电经由第二导体/电缆60012承载回到发生器60002以完成交流电所遵循的闭合路径。22 illustrates an
根据各个方面,发生器60002类似于上述发生器900,并且可包括例如类似于上述处理器902和波形发生器904的处理器和波形发生器。According to various aspects,
电外科器械60004可被配置用于单极操作,其中由发生器60002供应的电外科能量通过外科器械60004的有源电极引入到患者的组织中并且经由返回垫6006返回到发生器60002。根据各个方面,电外科器械60004包括手持件或光锥和电极尖端。电极尖端用作电外科系统60000的有源电极并且将电外科能量引入患者60010的目标组织。具体地,将放电从电极尖端递送到患者60010,以便引起与电极尖端紧密接触或相邻的患者60010的细胞物质的加热。组织加热在适当的高温下发生以允许电外科器械60004用于执行电外科手术。
图23示出了根据本公开的至少一个方面的图22的电外科系统60000的返回垫60006。返回垫60006与可从Megadyne医疗产品公司(Megadyne Medical Products,Inc.)商购获得的MEGA
返回垫60006与可从Megadyne医疗产品公司(Megadyne Medical Products,Inc.)商购获得的MEGA
图24示出了根据本公开的至少一个方面的图23的返回垫60006的多个电极60016。为了清楚起见,在图24中未示出返回垫60006的套筒或覆盖物60014。尽管在图24中示出了四个电极60016,但应当理解,返回垫60006可包括任何数量的电极60016。例如,根据各个方面,返回垫60006包括十六个电极60016。而且,尽管单独电极60016在图24中示出为大致矩形,但应当理解,单独电极可以是任何合适的形状。24 illustrates a plurality of
返回垫60006的电极60016可被视为图22的电外科系统60000的返回电极,并且也可被视为分段电极,因为电极60016可与患者的身体和/或发生器60002选择性地解耦合。返回垫60006的电极60016也可耦合在一起以有效地充当一个大电极。例如,根据各个方面,返回垫60006的电极60016中的每个可通过相应导电构件60018连接到切换装置60020的输入端,如图24中所示。当切换装置60020处于如图24中所示的打开位置时,返回垫60006的相应电极60016彼此解耦合以及与患者的身体和/或发生器60002解耦合。相比之下,当切换装置60020处于闭合位置时,返回垫60006的相应电极60016耦合在一起以有效地充当一个大电极。
切换装置60020可由处理电路(例如,电外科系统的发生器60002的处理电路、外科集线器206的处理电路、外科集线器106的处理电路等)控制。为了简单起见,图24中未示出处理电路。根据各个方面,图24中所示的切换装置60020可并入到返回垫60006中。根据其它方面,图24中所示的切换装置60006可并入到图22的电外科系统60000的第二导体/电缆60012中。返回垫60006还可包括多个感测装置60022(参见图25)。The
通过能够将多个电极60016耦合在一起以在电外科规程期间使用,返回垫60006的电极60016的总有效大小足够大和/或具有足够的表面积以保持电流密度足够低以减轻患者60010的任何不必要的灼伤的可能性。By being able to couple together
图25示出了根据本公开的至少一个方面的图23的返回垫60006的感测装置60022的阵列。为了清楚起见,在图25中未示出返回垫60006的套筒或覆盖物60014。根据各个方面,感测装置60022的数量对应于电极60016的数量,使得每个电极60016存在一个感测装置60022,并且每个感测装置60022被安装到对应的电极60016或与其集成。然而,尽管图25中所示的感测装置60022的数量对应于电极60016的数量,但应当理解,返回垫60006可包括任何数量的感测装置60022。例如,对于包括十六个电极60016的返回垫60006的各方面,返回垫60006可仅包括四个或八个感测装置60022。尽管感测装置60022在图25中示为以对应的电极60016为中心,但应当理解,感测装置60022可定位在对应的电极60016的任何部分上,并且可不同地定位在不同的电极60016上。25 illustrates an array of
感测装置60022被配置成能够检测施加到患者的单极神经控制信号和/或由神经控制信号的施加引起的患者的解剖特征的运动(例如,肌肉颤搐)。单极神经控制信号可由图22的电外科系统60000的电外科器械60004来施加,或者可由耦合到不同发生器的不同外科器械来施加。每个感测装置60022可包括例如压力传感器、加速计、它们的组合等,并且被配置成能够输出指示所检测到的神经控制信号和/或所检测到的患者的解剖特征的运动的信号。此类压力传感器可包括例如压阻应变仪、电容式压力传感器、电磁压力传感器和/或压电压力传感器。此类加速度计可包括例如机械加速度计、电容式加速度计、压电加速度计、电磁加速度计和/或微机电系统(MEMS)加速度计。相应感测装置60022的相应输出信号可以是模拟信号和/或数字信号的形式。The
使用库仑定律以及电外科器械60004的有源电极、患者身体和相应感测装置60022的相应位置,可分析相应感测装置60022的相应输出信号以确定神经在患者身体内的位置,该相应输出信号指示所检测到的神经控制信号和/或患者的解剖特征的运动。库仑定律指出E=K(Q/r2),其中E是在神经处刺激神经所需的阈值电流,K是常数,Q是来自神经刺激电极的最小电流,并且r是距神经的距离。神经刺激电极离神经越远,刺激神经所需的电流成比例地越大。因此,可利用恒定电流刺激来估计从神经刺激电极到神经的距离。通常,相应感测装置60022的输出信号的相应强度指示相应感测装置60022距患者60010的受刺激神经有多近或多远。Using Coulomb's law and the corresponding positions of the active electrodes of the
根据各个方面,对相应感测装置60022的相应输出信号的分析可由图22的电外科系统60000的发生器60002的处理电路、由与图22的电外科系统60000的发生器60002分开的神经监测系统的处理电路、由外科集线器206的处理电路、由外科集线器106的处理电路等执行。可实时或近实时地执行分析。根据各个方面,相应的输出信号用作由处理电路执行的单极神经刺激算法的输入。According to various aspects, analysis of the respective output signals of the
如图25所示,根据各个方面,相应感测装置60022的输出信号可经由相应导电构件60026输入到多输入-单输出切换装置60024(例如,多路复用器)中。通过控制到多输入-单输出切换装置60024的选择信号S0、S1,可控制多输入-单输出切换装置60024一次仅输出相应感测装置60024的输出信号中的一个以用于上述分析。例如,参考图25,通过将选择信号S0、S1设定为0、0,来自与图25的左上角中的电极60016相关联的感测装置60022的输出信号可由多输入-单输出切换装置60024输出以供适用的处理电路分析。通过将选择信号S0、S1设定为0、1,来自与图25的右上角中的电极60016相关联的感测装置60022的输出信号可由多输入-单输出切换装置60024输出以供适用的处理电路分析。通过将选择信号S0、S1设定为1、0,来自与图25的左下角中的电极60016相关联的感测装置60022的输出信号可由多输入-单输出切换装置60024输出以供适用的处理电路分析。通过将选择信号S0、S1设定为1、1,来自与图25的右下角中的电极60016相关联的感测装置60022的输出信号可由多输入-单输出切换装置60024输出以供适用的处理电路分析。As shown in FIG. 25 , according to various aspects, the output signals of
选择信号S0、S1可由处理电路提供到多输入-单输出切换装置60024,该处理电路例如图22的电外科系统60000的发生器60002的处理电路、与图22的电外科系统60000的发生器60002分开的神经监测系统的处理电路、外科集线器206的处理电路、外科集线器106的处理电路等。为了简单起见,在图25中未示出处理电路。通过以足够快的速率提供各种选择信号,可以允许及时分析相应感测装置的所有输出信号的速率有效地扫描相应感测装置的输出信号,以确定受刺激神经的位置。The selection signals S0 , S1 may be provided to the multiple-input-single-
根据各个方面,图25中所示的多输入-单输出切换装置60024可并入到返回垫60006中。根据其它方面,图25中所示的多输入-单输出切换装置60024可并入到图22的电外科系统60000的第二导体/线缆60012中。According to various aspects, the multiple-input-single-
以上在对应于图25中所示的四个感测装置60022的四输入-单输出切换装置的上下文中描述多输入-单输出切换装置60024的控制。将理解,对于存在多于四个感测装置60022(例如十六个感测装置)的方面,多于四个感测装置60022的输出信号将被输入到多输入-单输出切换装置60024,并且需要多于两个选择信号(例如S0、S1、S2和S3)来控制多输入-单输出切换装置60024的输出。The control of the multiple-input-single-
对于感测装置60024的输出信号为模拟信号的方面,多输入-单输出切换装置60024的输出可在由适用的处理电路执行输出信号的分析之前由模数转换器60026(如图25中的虚线所示)转换成对应的数字信号。For aspects where the output signal of the
通过将感测装置60022的阵列并入到返回垫60006的多个电极60016中,可确定患者的神经相对于电外科器械60004的电极尖端的位置。可将所确定的神经位置呈现给外科医生,从而减轻外科医生在利用电极尖端切割患者60010的目标组织时无意中损伤或切断神经的可能性。By incorporating an array of
根据各个方面,在返回垫60006的电极60016彼此耦合时或在电极60016彼此解耦合时,可执行感测装置60022对神经控制信号和/或患者的解剖特征的运动的检测。例如,关于在返回垫60006的相应电极60016彼此解耦合时执行检测,在将患者60010定位在手术台上之后但在开始外科规程之前,可通过控制图24中所示的切换装置60020以使返回垫60006的相应电极60016彼此解耦合来将返回垫60006置于“感测模式”。当相应电极60016彼此解耦合时,可如上所述用电外科器械60004刺激神经和/或神经束,并且可如上所述分析返回垫60006的感测装置60022的相应输出信号以识别与其相关联的神经、神经束和/或神经连结位于何处。这些位置可被输入到单极神经刺激算法曲线中,该单极神经刺激算法曲线可例如驻留在发生器60002的存储电路中、耦合到除了电外科器械60004之外的外科器械的不同发生器的存储电路中等。一旦这些位置被输入到单极神经刺激算法曲线中,这些位置就与返回垫60006的电极60016的电容操作有效地隔离,并且用作单极神经刺激算法曲线的感测节点,以当外科医生在执行组织切割手术时接近神经和/或神经束时通知外科医生。根据各个方面,可经由听觉警告、视觉警告、振动警告等通知外科医生神经和/或神经束的附近位置。According to various aspects, detection of neural control signals and/or movement of a patient's anatomical feature by the
关于在返回垫60006的相应电极60016彼此耦合时执行检测,根据各个方面,如下面参考图26更详细地描述的,图22的电外科系统60000的发生器60002可生成在载波上调制的高频波形(射频交流电),其中该载波具有足够低的频率以刺激患者的神经。这允许神经控制信号和/或解剖特征的运动的感测同返回垫60006的相应电极60016与患者身体的电容耦合同时发生。通过向患者60010施加特定的波形并感测特定的响应,高度确信解剖特征的运动是所施加的波形的结果而不仅仅是一些一般的运动。可随时间调整调制方式,以刺激不同大小的神经。根据各个方面,调制可随时间在振幅上变化,以便允许适用的处理电路确定神经和/或神经束与信号的距离,而不必不断地刺激神经和/或神经束。With regard to performing detection when the
图26示出了根据本公开的至少一个方面的用于同时向患者施加神经刺激信号和电外科能量的方法60030。作为该例示性过程中的第一步骤60032,发生器60002生成射频水平的交流电以作为高频波形。根据各个方面,发生器60002的波形发生器执行该步骤。26 illustrates a
对于第二步骤60034,发生器60002生成被配置成能够刺激患者的神经的低频波形。根据各个方面,低频波形是单极神经控制信号,并且发生器60002的波形发生器执行该步骤。For the
对于第三步骤60036,发生器60002利用在步骤60032处生成的高频波形来调制在步骤60034处生成的低频波形以形成复合波形。根据各个方面,发生器60002的波形发生器执行该步骤。根据其它实施方案,发生器60002的处理电路执行该步骤。For the
对于第四步骤60038,发生器60002将在步骤60036处生成的复合波形供应至电外科器械60004。For the
对于第五步骤60040,电外科器械60004的电极(即,有源电极)将复合波形施加到患者60010。高频波形用于加热患者60010的目标组织,并且离开患者身体,然后由返回垫60006的电极60016接收。低频波形用于刺激患者的神经和/或导致由神经控制信号的施加引起的患者的解剖特征的运动(例如,肌肉颤搐)。For the
对于第六步骤60042,经由切换装置60020耦合在一起的多个电极60016接收离开患者身体的电外科能量并且通过相应的导电构件60018、切换装置60020和第二导体/线缆60012将电外科能量传递回发生器60002。For the
对于第七步骤60044,感测装置60022检测施加到患者60010的单极神经控制信号和/或由神经控制信号的施加引起的患者60010的解剖特征的运动(例如,肌肉颤搐),并且生成与其对应的相应输出信号。相应感测装置60022的输出如上所述被采样并且被转发到处理电路以供分析。处理电路可以是例如图22的电外科系统60000的发生器60002的处理电路、与图22的电外科系统60000的发生器60002分开的神经监测系统的处理电路、外科集线器206的处理电路、外科集线器106的处理电路等。For the
对于第八步骤60046,适用的处理电路分析输出信号并确定与输出信号相关联的神经、神经束和/或神经连结位于何处。如上所述,根据各个方面,相应的输出信号可用作由处理电路执行的单极神经刺激算法的输入,并且单极神经刺激算法用于帮助防止外科医生切割或损害神经、神经束和/或神经连结。For an
实施例Example
本文所述主题的各个方面在以下编号的实施例中陈述。Various aspects of the subject matter described herein are set forth in the numbered Examples below.
实施例1-一种电外科系统的返回垫,该返回垫包括:多个导电构件,该多个导电构件被配置成能够接收施加到患者的射频电流;以及多个感测装置,该多个感测装置被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动。Embodiment 1 - A return pad for an electrosurgical system, the return pad comprising: a plurality of conductive members configured to receive radio frequency current applied to a patient; and a plurality of sensing devices, the plurality of The sensing device is configured to detect at least one of: a neural control signal applied to the patient; and movement of an anatomical feature of the patient caused by the application of the neural control signal.
实施例2-根据实施例1所述的返回垫,其中,该多个导电构件还被配置用于与患者电容耦合。Embodiment 2 - The return pad of
实施例3-根据实施例1至2中任一项所述的返回垫,还包括切换装置,该切换装置被配置用于将多个导电构件中的至少一个导电构件与该多个导电构件中的另一个导电构件选择性地解耦合。Embodiment 3 - The return pad of any of Embodiments 1-2, further comprising a switching device configured to connect at least one conductive member of the plurality of conductive members with the plurality of conductive members The other conductive member of the is selectively decoupled.
实施例4-根据实施例1至3中任一项所述的返回垫,还包括切换装置,该切换装置被配置用于将这些导电构件中的每个导电构件与另一个导电构件选择性地解耦合。Embodiment 4 - The return pad of any one of
实施例5-根据实施例1至4中任一项所述的返回垫,还包括切换装置,该切换装置被配置用于将多个导电构件与患者选择性地解耦合。Embodiment 5 - The return pad of any of Embodiments 1-4, further comprising a switching device configured to selectively decouple the plurality of conductive members from the patient.
实施例6-根据实施例1至5中任一项所述的返回垫,还包括切换装置,该切换装置被配置用于将该多个导电构件与发生器选择性地解耦合。Embodiment 6 - The return pad of any of Embodiments 1-5, further comprising a switching device configured to selectively decouple the plurality of conductive members from the generator.
实施例7-根据实施例1至6中任一项所述的返回垫,还包括切换装置,该切换装置被配置用于将该多个导电构件中的每个导电构件选择性地耦合到发生器。Embodiment 7 - The return pad of any of Embodiments 1-6, further comprising a switching device configured to selectively couple each conductive member of the plurality of conductive members to a device.
实施例8-根据实施例1至7中任一项所述的返回垫,其中,该多个感测装置被配置成感测装置阵列。Embodiment 8 - The return pad of any of Embodiments 1-7, wherein the plurality of sensing devices are configured as an array of sensing devices.
实施例9-根据实施例1至8中任一项所述的返回垫,其中,该多个感测装置中的每个感测装置耦合到该多个导电构件中的对应的一个导电构件。Embodiment 9 - The return pad of any of Embodiments 1-8, wherein each sensing device of the plurality of sensing devices is coupled to a corresponding one of the plurality of conductive members.
实施例10-根据实施例1至9中任一项所述的返回垫,其中,该多个导电构件中的每个导电构件耦合到该多个感测装置中的对应的一个感测装置。Embodiment 10 - The return pad of any of Embodiments 1-9, wherein each conductive member of the plurality of conductive members is coupled to a corresponding one of the plurality of sensing devices.
实施例11-根据实施例1至10中任一项所述的返回垫,其中,该多个感测装置中的至少一个感测装置包括以下中的一者:压力传感器;加速度计;以及压力传感器和加速度计。Embodiment 11 - The return pad of any of Embodiments 1-10, wherein at least one sensing device of the plurality of sensing devices comprises one of: a pressure sensor; an accelerometer; and a pressure sensors and accelerometers.
实施例12-根据实施例1至11中任一项所述的返回垫,其中,该多个感测装置中的每个感测装置还被配置成能够输出指示检测的信号。Embodiment 12 - The return pad of any of Embodiments 1-11, wherein each sensing device of the plurality of sensing devices is further configured to output a signal indicative of detection.
实施例13-一种电外科系统,包括:发生器,该发生器被配置成能够供应射频交流电;器械,该器械被配置成能够将交流电施加到患者;返回垫,该返回垫能够电容耦合到患者,其中该返回垫包括:多个导电构件,该多个导电构件被配置成能够传导射频电流,其中该多个导电构件能够电容耦合到患者并且能够选择性地耦合到发生器;多个感测装置,该多个感测装置被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动;以及耦合到返回垫和发生器的导体。Embodiment 13 - An electrosurgical system comprising: a generator configured to supply radio frequency alternating current; an instrument configured to apply alternating current to a patient; a return pad capacitively coupled to a patient, wherein the return pad includes: a plurality of conductive members configured to conduct radio frequency current, wherein the plurality of conductive members can be capacitively coupled to the patient and selectively coupled to the generator; a plurality of sense a detection device, the plurality of sensing devices configured to detect at least one of: a neural control signal applied to the patient; and movement of an anatomical feature of the patient caused by the application of the neural control signal; and coupled to the return pad and generator conductors.
实施例14-根据实施例13所述的电外科系统,还包括耦合到该多个感测装置中的每个感测装置的多输入-单输出切换装置。Embodiment 14 - The electrosurgical system of Embodiment 13, further comprising a multiple-input-single-output switching device coupled to each sensing device of the plurality of sensing devices.
实施例15-根据实施例14所述的电外科系统,还包括耦合到多输入-单输出切换装置的模数转换器。Embodiment 15 - The electrosurgical system of Embodiment 14, further comprising an analog-to-digital converter coupled to the multiple-input-single-output switching device.
实施例16-根据实施例1至15中任一项所述的电外科系统,其中该发生器还被配置成能够:生成交流电以作为高频波形;生成被配置成能够刺激患者的神经的低频波形;利用高频波形调制低频波形以形成复合波形;并且将复合波形供应至器械。Embodiment 16 - The electrosurgical system of any one of
实施例17-根据实施例1至16中任一项所述的电外科系统,其中,该发生器还被配置成能够对低频波形进行振幅调制以形成复合波形。Embodiment 17 - The electrosurgical system of any one of
实施例18-一种电外科系统的返回垫,该返回垫包括:多个电极,该多个电极被配置用于与患者电容耦合;以及感测装置的阵列,该感测装置的阵列被配置成能够检测以下中的至少一者:施加到患者的神经控制信号;以及由神经控制信号的施加引起的患者的解剖特征的运动。Embodiment 18 - A return pad for an electrosurgical system, the return pad comprising: a plurality of electrodes configured for capacitive coupling with a patient; and an array of sensing devices configured The device is capable of detecting at least one of: a neural control signal applied to the patient; and movement of an anatomical feature of the patient caused by the application of the neural control signal.
实施例19-根据实施例18所述的返回垫,其中,该感测装置的阵列中的每个感测装置被配置成能够输出指示检测的信号。Embodiment 19 - The return pad of Embodiment 18, wherein each sensing device in the array of sensing devices is configured to output a signal indicative of detection.
实施例20-根据实施例18至19中任一项所述的返回垫,其中,该感测装置的阵列中的每个感测装置被定位在该多个电极中的对应的一个电极上。Embodiment 20 - The return pad of any of Embodiments 18-19, wherein each sensing device in the array of sensing devices is positioned on a corresponding one of the plurality of electrodes.
尽管已举例说明和描述了多个形式,但是申请人的意图并非将所附权利要求的范围约束或限制在此类细节中。在不脱离本公开的范围的情况下,可实现对这些形式的许多修改、变化、改变、替换、组合和等同物,并且本领域技术人员将想到这些形式的许多修改、变化、改变、替换、组合和等同物。此外,另选地,可将与所描述的形式相关联的每个元件的结构描述为用于提供由所述元件执行的功能的器件。另外,在公开了用于某些部件的材料的情况下,也可使用其它材料。因此,应当理解,上述具体实施方式和所附权利要求旨在涵盖属于本发明所公开的形式范围内的所有此类修改形式、组合和变型形式。所附权利要求旨在涵盖所有此类修改、变化、改变、替换、修改和等同物。While various forms have been illustrated and described, it is not the intention of the applicants to restrict or limit the scope of the appended claims to such details. Numerous modifications, variations, changes, substitutions, combinations and equivalents of these forms may be made without departing from the scope of the present disclosure, and many modifications, variations, changes, substitutions, Combinations and Equivalents. Also, alternatively, the structure of each element associated with the described form may be described as a means for providing the function performed by the element. Additionally, where materials are disclosed for certain components, other materials may also be used. Therefore, it should be understood that the foregoing detailed description and the appended claims are intended to cover all such modifications, combinations and variations as fall within the scope of the present disclosure. The appended claims are intended to cover all such modifications, variations, changes, substitutions, alterations and equivalents.
上述具体实施方式已通过使用框图、流程图和/或示例阐述了装置和/或方法的各种形式。只要此类框图、流程图和/或示例包含一个或多个功能和/或操作,本领域的技术人员就要将其理解为此类框图、流程图和/或示例中的每个功能和/或操作都可以单独和/或共同地通过多种硬件、软件、固件或实际上它们的任何组合来实现。本领域的技术人员将会认识到,本文公开的形式中的一些方面可作为在一台或多台计算机上运行的一个或多个计算机程序(如,作为在一个或多个计算机系统上运行的一个或多个程序),作为在一个或多个处理器上运行的一个或多个程序(如,作为在一个或多个微处理器上运行的一个或多个程序),作为固件,或作为实际上它们的任何组合全部或部分地在集成电路中等效地实现,并且根据本发明,设计电子电路和/或编写软件和/或硬件的代码将在本领域技术人员的技术范围内。另外,本领域的技术人员将会认识到,本文所述主题的机制能够作为多种形式的一个或多个程序产品进行分布,并且本文所述主题的示例性形式适用,而不管用于实际进行分布的信号承载介质的具体类型是什么。The foregoing detailed description has set forth various forms of apparatuses and/or methods through the use of block diagrams, flowcharts, and/or examples. So long as such block diagrams, flowcharts and/or examples include one or more functions and/or operations, those skilled in the art will understand each function and/or operation in such block diagrams, flowcharts and/or examples or operations may be implemented individually and/or collectively by a variety of hardware, software, firmware, or virtually any combination thereof. Those skilled in the art will recognize that some aspects of the forms disclosed herein may be implemented as one or more computer programs (eg, as one or more computer programs) running on one or more computers one or more programs), as one or more programs running on one or more processors (eg, as one or more programs running on one or more microprocessors), as firmware, or as Indeed any combination of them is equivalently implemented in whole or in part in an integrated circuit, and it would be within the skill of those skilled in the art to design electronic circuits and/or code software and/or hardware in accordance with the present invention. In addition, those skilled in the art will recognize that the mechanisms of the subject matter described herein can be distributed as one or more program products in a variety of forms, and that exemplary forms of the subject matter described herein are applicable regardless of use in actual implementation. What is the specific type of signal bearing medium distributed.
用于编程逻辑以执行各种所公开的方面的指令可存储在系统内的存储器内,诸如动态随机存取存储器(DRAM)、高速缓存、闪存存储器或其它存储器。此外,指令可经由网络或通过其它计算机可读介质来分发。因此,机器可读介质可包括用于存储或发射以机器(例如,计算机)读形式的信息的机构,但不限于软盘、光学盘、光盘、只读存储器(CD-ROM)、磁光盘、只读存储器(ROM)、随机存取存储器(RAM)、可擦除可编程只读存储器(EPROM)、电可擦除可编程只读存储器(EEPROM)、磁卡或光卡、闪存存储器、或经由电信号、光学信号、声学信号或其它形式的传播信号(例如,载波、红外信号、数字信号等)在因特网上发射信息时使用的有形的、机器可读存储装置。因此,非暂态计算机可读介质包括适于以机器(例如,计算机)可读的形式存储或发射电子指令或信息的任何类型的有形机器可读介质。Instructions for programming logic to perform the various disclosed aspects may be stored in memory within the system, such as dynamic random access memory (DRAM), cache, flash memory, or other memory. Furthermore, the instructions may be distributed over a network or through other computer-readable media. Thus, a machine-readable medium may include a mechanism for storing or transmitting information in a form readable by a machine (eg, a computer), but is not limited to a floppy disk, optical disk, optical disk, read only memory (CD-ROM), magneto-optical disk, only Read Memory (ROM), Random Access Memory (RAM), Erasable Programmable Read Only Memory (EPROM), Electrically Erasable Programmable Read Only Memory (EEPROM), magnetic or optical cards, flash memory, or via electrical A tangible, machine-readable storage device used when a signal, optical signal, acoustic signal, or other form of propagated signal (eg, carrier wave, infrared signal, digital signal, etc.) transmits information over the Internet. Accordingly, non-transitory computer-readable media includes any type of tangible machine-readable media suitable for storing or transmitting electronic instructions or information in a form readable by a machine (eg, a computer).
如本说明书通篇所用,术语“无线”及其衍生物可用于描述可通过使用经调制的电磁辐射通过非固体介质来传送数据的电路、装置、系统、方法、技术、通信信道等。该术语并不意味着相关联的组织不包含任何电线,尽管在一些方面它们可能不包含。通信模块可实现多种无线或有线通信标准或协议中的任一种,包括但不限于Wi-Fi(IEEE 802.11系列)、WiMAX(IEEE 802.16系列)、IEEE 802.20、长期演进(LTE)、Ev-DO、HSPA+、HSDPA+、HSUPA+、EDGE、GSM、GPRS、CDMA、TDMA、DECT、蓝牙、及其以太网衍生物、以及被指定为3G、4G、5G和以上的任何其它无线和有线协议。计算模块可包括多个通信模块。例如,第一通信模块可专用于较短距离的无线通信诸如Wi-Fi和蓝牙,并且第二通信模块可专用于较长距离的无线通信诸如GPS、EDGE、GPRS、CDMA、WiMAX、LTE、Ev-DO等。As used throughout this specification, the term "wireless" and derivatives thereof may be used to describe circuits, devices, systems, methods, techniques, communication channels, etc. that can transmit data through a non-solid medium using modulated electromagnetic radiation. The term does not imply that the associated organizations do not contain any wires, although in some respects they may not. The communication module can implement any of a variety of wireless or wired communication standards or protocols, including but not limited to Wi-Fi (IEEE 802.11 series), WiMAX (IEEE 802.16 series), IEEE 802.20, Long Term Evolution (LTE), Ev- DO, HSPA+, HSDPA+, HSUPA+, EDGE, GSM, GPRS, CDMA, TDMA, DECT, Bluetooth, and their Ethernet derivatives, and any other wireless and wireline protocols designated as 3G, 4G, 5G and above. The computing module may include multiple communication modules. For example, the first communication module may be dedicated to shorter range wireless communications such as Wi-Fi and Bluetooth, and the second communication module may be dedicated to longer range wireless communication such as GPS, EDGE, GPRS, CDMA, WiMAX, LTE, Ev -DO etc.
如本文任一方面所用,术语“控制电路”可指例如硬连线电路系统、可编程电路系统(例如,计算机处理器,该计算机处理器包括一个或多个单独指令处理内核、处理单元,处理器、微控制器、微控制器单元、控制器、数字信号处理器(DSP)、可编程逻辑装置(PLD)、可编程逻辑阵列(PLA)、场可编程门阵列(FPGA))、状态机电路系统、存储由可编程电路系统执行的指令的固件、以及它们的任何组合。控制电路可以集体地或单独地实现为形成更大系统的一部分的电路系统,例如集成电路(IC)、专用集成电路(ASIC)、片上系统(SoC)、台式计算机、膝上型计算机、平板计算机、服务器、智能电话等。因此,如本文所用,“控制电路”包括但不限于具有至少一个离散电路的电子电路、具有至少一个集成电路的电子电路、具有至少一个专用集成电路的电子电路、形成由计算机程序配置的通用计算设备的电子电路(如,至少部分地实施本文所述的方法和/或设备的由计算机程序配置的通用计算机,或至少部分地实施本文所述的方法和/或设备的由计算机程序配置的微处理器)、形成存储器设备(如,形成随机存取存储器)的电子电路,和/或形成通信设备(如,调节解调器、通信开关或光电设备)的电子电路。本领域的技术人员将会认识到,可以模拟或数字方式或它们的一些组合实施本文所述的主题。As used in any aspect herein, the term "control circuitry" may refer to, for example, hardwired circuitry, programmable circuitry (eg, a computer processor that includes one or more individual instruction processing cores, processing units, processing devices, microcontrollers, microcontroller units, controllers, digital signal processors (DSPs), programmable logic devices (PLDs), programmable logic arrays (PLAs), field programmable gate arrays (FPGAs), state machines Circuitry, firmware that stores instructions for execution by programmable circuitry, and any combination thereof. The control circuits may be implemented collectively or individually as circuitry forming part of a larger system, such as an integrated circuit (IC), an application specific integrated circuit (ASIC), a system on a chip (SoC), a desktop computer, a laptop computer, a tablet computer , servers, smartphones, etc. Thus, as used herein, "control circuit" includes, but is not limited to, an electronic circuit having at least one discrete circuit, an electronic circuit having at least one integrated circuit, an electronic circuit having at least one application specific integrated circuit, forming a general-purpose computer configured by a computer program Electronic circuitry of an apparatus (eg, a general-purpose computer configured by a computer program at least partially implementing the methods and/or apparatus described herein, or a microcomputer configured by a computer program at least partially implementing the methods and/or apparatus described herein) processors), electronic circuits that form memory devices (eg, random access memory), and/or electronic circuits that form communication devices (eg, modems, communication switches, or optoelectronic devices). Those skilled in the art will recognize that the subject matter described herein may be implemented in analog or digital fashion, or some combination thereof.
如本文所用,处理器或处理单元是对一些外部数据源(通常为存储器或一些其它数据流)执行操作的电子电路。本文所用术语是指组合多个专门的“处理器”的一个或多个系统(尤其是片上系统(SoC))中的中央处理器(中央处理单元)。As used herein, a processor or processing unit is an electronic circuit that performs operations on some external data source, typically a memory or some other data stream. The term as used herein refers to a central processing unit (central processing unit) in one or more systems, particularly a system-on-a-chip (SoC), that combines multiple specialized "processors".
如本文所用,片上系统或芯片上系统(SoC或SOC)为集成了计算机或其它电子系统的所有部件的集成电路(也被称为“IC”或“芯片”)。它可以包含数字、模拟、混合信号以及通常射频功能—全部在单个基板上。SoC将微控制器(或微处理器)与高级外围装置如图形处理单元(GPU)、Wi-Fi模块或协处理器集成。SoC可以包含或可不包含内置存储器。As used herein, a system on a chip or system on a chip (SoC or SOC) is an integrated circuit (also referred to as an "IC" or "chip") that integrates all components of a computer or other electronic system. It can contain digital, analog, mixed-signal, and generally RF functionality—all on a single substrate. A SoC integrates a microcontroller (or microprocessor) with advanced peripherals such as a graphics processing unit (GPU), Wi-Fi module or co-processor. The SoC may or may not contain built-in memory.
如本文所用,微控制器或控制器为将微处理器与外围电路和存储器集成的系统。微控制器(或微控制器单元的MCU)可被实现为单个集成电路上的小型计算机。其可类似于SoC;SoC可包括作为其部件之一的微控制器。微控制器可包含一个或多个核心处理单元(CPU)以及存储器和可编程输入/输出外围装置。以铁电RAM、NOR闪存或OTP ROM形式的程序存储器以及少量RAM也经常包括在芯片上。与个人计算机或由各种分立芯片组成的其它通用应用中使用的微处理器相比,微控制器可用于嵌入式应用。As used herein, a microcontroller or controller is a system that integrates a microprocessor with peripheral circuits and memory. A microcontroller (or MCU of a microcontroller unit) can be implemented as a small computer on a single integrated circuit. It may be similar to a SoC; an SoC may include as one of its components a microcontroller. A microcontroller may contain one or more core processing units (CPUs) as well as memory and programmable input/output peripherals. Program memory in the form of ferroelectric RAM, NOR flash or OTP ROM, and a small amount of RAM are also often included on the chip. In contrast to microprocessors used in personal computers or other general-purpose applications consisting of various discrete chips, microcontrollers can be used in embedded applications.
如本文所用,术语控制器或微控制器可为与外围装置交接的独立式IC或芯片装置。这可为计算机的两个部件或用于管理该装置的操作(以及与该装置的连接)的外部装置上的控制器之间的链路。As used herein, the term controller or microcontroller may be a stand-alone IC or chip device that interfaces with peripheral devices. This can be a link between two components of a computer or a controller on an external device that manages the operation of the device (and connections to the device).
如本文所述的处理器或微控制器中的任一者可为任何单核或多核处理器,诸如由德克萨斯器械公司(Texas Instruments)提供的商品名为ARM Cortex的那些。在一个方面,处理器可为例如购自德克萨斯器械公司(Texas Instruments)的LM4F230H5QR ARMCortex-M4F处理器内核,其包括:256KB的单循环闪存或其它非易失性存储器(最多至40MHZ)的片上存储器、用于使性能改善超过40MHz的预取缓冲器、32KB的单循环串行随机存取存储器(SRAM)、装载有Stellaris
在一个示例中,处理器可包括安全控制器,该安全控制器包括两个基于控制器的系列,诸如同样由德克萨斯器械公司(Texas Instruments)提供的商品名为Hercules ARMCortex R4的TMS570和RM4x。安全控制器可被配置成能够专门用于IEC 61508和ISO 26262安全关键应用等等,以提供先进的集成安全特征部,同时递送可定标的性能、连接性和存储器选项。In one example, the processor may include a safety controller including two families of controllers, such as the TMS570 and the Hercules ARMCortex R4, also offered by Texas Instruments. RM4x. The safety controller can be configured to be dedicated to IEC 61508 and ISO 26262 safety critical applications, among others, to provide advanced integrated safety features while delivering scalable performance, connectivity and memory options.
如本文的任何方面所用,术语“逻辑”可指被配置成能够执行前述操作中的任一者的应用程序、软件、固件和/或电路系统。软件可体现为记录在非暂态计算机可读存储介质上的软件包、代码、指令、指令集和/或数据。固件可以体现为在存储设备中硬编码(例如,非易失性)的代码、指令或指令集和/或数据。As used in any aspect herein, the term "logic" may refer to applications, software, firmware and/or circuitry configured to perform any of the foregoing operations. Software may be embodied as a software package, code, instructions, sets of instructions, and/or data recorded on a non-transitory computer-readable storage medium. Firmware may be embodied as code, instructions or a set of instructions and/or data hardcoded (eg, non-volatile) in a storage device.
如本文任一方面所用,术语“部件”、“系统”、“模块”等可指计算机相关实体、硬件、硬件和软件的组合、软件或执行中的软件。As used in any aspect herein, the terms "component," "system," "module," etc. may refer to a computer-related entity, hardware, a combination of hardware and software, software, or software in execution.
如本文任一方面中所用,“算法”是指导致所需结果的有条理的步骤序列,其中“步骤”是指物理量和/或逻辑状态的操纵,物理量和/或逻辑状态可以(但不一定)采用能被存储、转移、组合、比较和以其它方式操纵的电或磁信号的形式。常用于指这些信号,如位、值、元素、符号、字符、术语、数字等。这些和类似的术语可与适当的物理量相关联并且仅仅是应用于这些量和/或状态的方便的标签。As used in any aspect herein, "algorithm" refers to an organized sequence of steps leading to a desired result, wherein "step" refers to the manipulation of physical quantities and/or logical states, which may (but need not be) ) take the form of electrical or magnetic signals capable of being stored, transferred, combined, compared and otherwise manipulated. Often used to refer to these signals as bits, values, elements, symbols, characters, terms, numbers, etc. These and similar terms may be associated with the appropriate physical quantities and are merely convenient labels applied to these quantities and/or states.
网络可包括分组交换网络。通信装置可能够使用所选择的分组交换网络通信协议来彼此通信。一个示例性通信协议可包括可允许使用传输控制协议/因特网协议(TCP/IP)进行通信的以太网通信协议。以太网协议可符合或兼容电气和电子工程师学会(IEEE)于2008年12月发布的名为“IEEE 802.3标准”的以太网标准和/或本标准的更高版本。另选地或附加地,通信装置可以能够使用X.25通信协议彼此通信。X.25通信协议可符合或符合国际电信联盟电信标准化部门(ITU-T)颁布的标准。另选地或附加地,通信装置可能够使用帧中继通信协议彼此通信。帧中继通信协议可符合或符合国际电话和电话协商委员会(CCITT)和/或美国国家标准学会(ANSI)发布的标准。另选地或附加地,收发器可能够使用异步传输模式(ATM)通信协议彼此通信。ATM通信协议可符合或兼容ATM论坛于2001年8月发布的名为“ATM-MPLS网络互通2.0”的ATM标准和/或该标准的更高版本。当然,本文同样设想了不同的和/或之后开发的连接取向的网络通信协议。The network may include a packet-switched network. The communication devices may be capable of communicating with each other using the selected packet-switched network communication protocol. An exemplary communication protocol may include an Ethernet communication protocol that may allow communication using Transmission Control Protocol/Internet Protocol (TCP/IP). The Ethernet protocol may conform to or be compatible with the Ethernet standard titled "IEEE 802.3 Standard" published by the Institute of Electrical and Electronics Engineers (IEEE) in December 2008 and/or later versions of this standard. Alternatively or additionally, the communication devices may be able to communicate with each other using the X.25 communication protocol. The X.25 communication protocol may conform or conform to standards promulgated by the International Telecommunication Union Telecommunication Standardization Sector (ITU-T). Alternatively or additionally, the communication devices may be able to communicate with each other using a frame relay communication protocol. The Frame Relay communication protocol may conform or conform to standards published by the Consultative Committee for International Telephone and Telephony (CCITT) and/or the American National Standards Institute (ANSI). Alternatively or additionally, the transceivers may be capable of communicating with each other using an asynchronous transfer mode (ATM) communication protocol. The ATM communication protocol may conform to or be compatible with the ATM standard named "ATM-MPLS Network Interworking 2.0" published by the ATM Forum in August 2001 and/or a higher version of the standard. Of course, different and/or later developed connection-oriented network communication protocols are also contemplated herein.
除非上述公开中另外明确指明,否则可以理解的是,在上述公开中,使用术语如“处理”、“估算”、“计算”、“确定”、“显示”的讨论是指计算机系统或类似的电子计算装置的动作和进程,其操纵表示为计算机系统的寄存器和存储器内的物理(电子)量的数据并将其转换成相似地表示为计算机系统存储器或寄存器或其它此类信息存储、传输或显示装置内的物理量的其它数据。Unless explicitly stated otherwise in the above disclosure, it is understood that in the above disclosure, discussions using terms such as "processing," "estimating," "calculating," "determining," "displaying," refer to computer systems or similar Acts and processes of electronic computing devices that manipulate data represented as physical (electronic) quantities within the registers and memory of a computer system and convert it into data similarly represented as computer system memory or registers or other such information storage, transmission or Displays other data of physical quantities within the device.
一个或多个部件在本文中可被称为“被配置成能够”、“可被配置成能够”、“可操作/可操作地”、“适于/可适于”、“能够”、“可适形/适形于”等。本领域的技术人员将会认识到,除非上下文另有所指,否则“被配置成能够”通常可涵盖活动状态的部件和/或未活动状态的部件和/或待机状态的部件。One or more components may be referred to herein as "configured to be able", "configurable to be able", "operable/operable", "adapted/adaptable", "capable", " Conformable/Conformable to" etc. Those skilled in the art will recognize that unless the context dictates otherwise, "configured to be able" may generally encompass active state components and/or inactive state components and/or standby state components.
术语“近侧”和“远侧”在本文中是相对于操纵外科器械的柄部部分的临床医生来使用的。术语“近侧”是指最靠近临床医生的部分,术语“远侧”是指远离临床医生定位的部分。还应当理解,为简洁和清楚起见,本文可结合图使用诸如“竖直”、“水平”、“上”、“下”、“左”和“右”之类的空间术语。然而,外科器械在许多方向和位置中使用,并且这些术语并非限制性的和/或绝对的。The terms "proximal" and "distal" are used herein with respect to a clinician manipulating the handle portion of a surgical instrument. The term "proximal" refers to the portion closest to the clinician, and the term "distal" refers to the portion located away from the clinician. It should also be understood that, for brevity and clarity, spatial terms such as "vertical," "horizontal," "upper," "lower," "left," and "right" may be used herein in connection with the figures. However, surgical instruments are used in many orientations and positions, and these terms are not intended to be limiting and/or absolute.
模块化装置包括可接纳在外科集线器内的模块(如结合图3和图9所述)和外科装置或器械,该外科装置或器械可连接到各种模块以便与对应的外科集线器连接或配对。模块化装置包括例如智能外科器械、医疗成像装置、抽吸/冲洗装置、排烟器、能量发生器、呼吸机、吹入器和显示器。本文所述的模块化装置可通过控制算法来控制。控制算法可在模块化装置自身上、在与特定模块化装置配对的外科集线器上或在模块化装置和外科集线器两者上执行(例如,经由分布式计算架构)。在一些示例中,模块化装置的控制算法基于由模块化装置自身感测到的数据来控制装置(即,通过模块化设备之中、之上或连接到模块化装置的传感器)。该数据可与正在手术的患者(例如,组织特性或吹入压力)或模块化装置本身相关(例如,刀被推进的速率、马达电流或能量水平)。例如,外科缝合和切割器械的控制算法可根据刀在其前进时遇到的阻力来控制器械的马达驱动其刀穿过组织的速率。Modular devices include modules receivable within a surgical hub (as described in connection with Figures 3 and 9) and surgical devices or instruments that can be connected to the various modules for connection or mating with a corresponding surgical hub. Modular devices include, for example, smart surgical instruments, medical imaging devices, suction/irrigation devices, smoke evacuators, energy generators, ventilators, insufflators, and displays. The modular devices described herein may be controlled by a control algorithm. Control algorithms may be executed on the modular device itself, on the surgical hub paired with a particular modular device, or on both the modular device and the surgical hub (eg, via a distributed computing architecture). In some examples, the control algorithm of the modular device controls the device based on data sensed by the modular device itself (ie, through sensors in, on, or connected to the modular device). This data may be related to the patient being operated on (eg, tissue properties or insufflation pressure) or the modular device itself (eg, the rate at which the blade is advanced, motor current or energy level). For example, a control algorithm for a surgical stapling and cutting instrument may control the rate at which the instrument's motor drives its blade through tissue based on the resistance the blade encounters as it advances.
本领域的技术人员将认识到,一般而言,本文、以及特别是所附权利要求(例如,所附权利要求的正文)中所使用的术语通常旨在为“开放”术语(例如,术语“包括”应解释为“包括但不限于”,术语“具有”应解释为“至少具有”,术语“包含”应解释为“包含但不限于”等)。本领域的技术人员还应当理解,如果所引入权利要求叙述的具体数目为预期的,则这样的意图将在权利要求中明确叙述,并且在不存在这样的叙述的情况下,不存在这样的意图。例如,为有助于理解,下述所附权利要求可含有对介绍性短语“至少一个”和“一个或多个”的使用以引入权利要求。然而,对此类短语的使用不应视为暗示通过不定冠词“一个”或“一种”引入权利要求表述将含有此类引入权利要求表述的任何特定权利要求限制在含有仅一个这样的表述的权利要求中,甚至当同一权利要求包括介绍性短语“一个或多个”或“至少一个”和诸如“一个”或“一种”(例如,“一个”和/或“一种”通常应解释为意指“至少一个”或“一个或多个”)的不定冠词时;这也适用于对用于引入权利要求表述的定冠词的使用。Those of skill in the art will recognize that the terms used herein, in general, and in the appended claims in particular (eg, the body of the appended claims) are generally intended to be "open" terms (eg, the term "" Including" should be interpreted as "including but not limited to", the term "having" should be interpreted as "having at least", the term "including" should be interpreted as "including but not limited to", etc.). It will also be understood by those within the art that if a specific number of an introduced claim recitation is intended, such an intent will be explicitly recited in the claim, and in the absence of such recitation no such intent is present . For example, as an aid to understanding, the following appended claims may contain usage of the introductory phrases "at least one" and "one or more" to introduce claims. However, use of such phrases should not be taken to imply that introduction of a claim expression by the indefinite articles "a" or "an" limits any particular claim containing such introduced claim expression to containing only one such expression even when the same claim includes the introductory phrases "one or more" or "at least one" and phrases such as "a" or "an" (eg, "an" and/or "an" should generally be When interpreted as an indefinite article meaning "at least one" or "one or more"); this also applies to the use of the definite article for introducing claim expressions.
另外,即使明确叙述引入权利要求叙述的特定数目,本领域的技术人员应当认识到,此种叙述通常应解释为意指至少所叙述的数目(例如,在没有其它修饰语的情况下,对“两个叙述”的裸叙述通常意指至少两个叙述、或两个或更多个叙述)。此外,在其中使用类似于“A、B和C中的至少一者等”的惯例的那些情况下,一般而言,这种结构意在具有本领域的技术人员将理解所述惯例的意义(例如,“具有A、B和C中的至少一者的系统”将包括但不限于具有仅A、仅B、仅C、A和B一起、A和C一起、B和C一起和/或A、B和C一起等的系统)。在其中使用类似于“A、B或C中的至少一者等”的惯例的那些情况下,一般而言,这种结构意在具有本领域的技术人员将理解所述惯例的意义(例如,“具有A、B或C中的至少一者的系统”应当包括但不限于具有仅A、仅B、仅C、A和B一起、A和C一起、B和C一起和/或A、B和C一起等的系统)。本领域的技术人员还应当理解,通常,除非上下文另有指示,否则无论在具体实施方式、权利要求或附图中呈现两个或更多个替代术语的转折性词语和/或短语应理解为涵盖包括所述术语中的一者、所述术语中的任一个或这两个术语的可能性。例如,短语“A或B”通常将被理解为包括“A”或“B”或“A和B”的可能性。Additionally, even if a specific number of an introduced claim recitation is explicitly recited, one skilled in the art will recognize that such recitation should generally be construed to mean at least the recited number (eg, in the absence of other modifiers, to "" The "naked narration of two narrations" generally means at least two narrations, or two or more narrations). Furthermore, in those cases where a convention similar to "at least one of A, B, and C, etc." is used, in general, this structure is intended to have the meaning that those skilled in the art would understand the convention ( For example, "a system having at least one of A, B, and C" would include, but not be limited to, having A only, B only, C only, A and B together, A and C together, B and C together, and/or A , B and C together etc.). In those cases where a convention similar to "at least one of A, B, or C, etc." is used, in general, such constructions are intended to have the meaning that those skilled in the art would understand the convention (eg, "A system having at least one of A, B, or C" shall include, but is not limited to, having A only, B only, C only, A and B together, A and C together, B and C together, and/or A, B systems such as with C). It will also be understood by those skilled in the art that, generally, unless the context dictates otherwise, the presentation of two or more alternative terms in the detailed description, claims, or drawings, inflectional words and/or phrases should be construed as The possibility of including one of the terms, either of the terms, or both of the terms is encompassed. For example, the phrase "A or B" will generally be understood to include the possibilities of "A" or "B" or "A and B".
对于所附的权利要求,本领域的技术人员将会理解,其中表述的操作通常可以任何顺序进行。另外,尽管以(一个或多个)序列出了多个操作流程图,但应当理解,可以不同于所示顺序的其它顺序进行所述多个操作,或者可以同时进行所述多个操作。除非上下文另有规定,否则此类替代排序的示例可包括重叠、交错、中断、重新排序、增量、预备、补充、同时、反向,或其它改变的排序。此外,除非上下文另有规定,否则像“响应于”、“相关”这样的术语或其它过去式的形容词通常不旨在排除此类变体。With regard to the appended claims, those skilled in the art will understand that the operations recited therein can generally be performed in any order. Additionally, although the various operations are presented in a flowchart of sequence(s), it should be understood that the various operations may be performed in other orders than shown, or may be performed concurrently. Unless context dictates otherwise, examples of such alternative orderings may include overlapping, interleaved, interrupted, reordered, incremental, preparatory, supplemental, simultaneous, reversed, or other altered orderings. Furthermore, terms like "responsive to," "related to," or other past-tense adjectives are generally not intended to exclude such variations unless the context dictates otherwise.
值得一提的是,任何对“一个方面”、“一方面”、“一范例”、“一个范例”的提及均意指结合所述方面所述的具体特征、结构或特性包括在至少一个方面中。因此,在整个说明书的不同位置出现的短语“在一个方面”、“在一方面”、“在一范例”、“在一个范例”不一定都指同一方面。此外,具体特征、结构或特性可在一个或多个方面中以任何合适的方式组合。It is worth mentioning that any reference to "an aspect", "an aspect", "an example", "an example" means that the particular feature, structure or characteristic described in connection with the aspect is included in at least one aspect. Thus, appearances of the phrases "in one aspect," "in an aspect," "in an example," "in an example" in various places throughout the specification are not necessarily all referring to the same aspect. Furthermore, the particular features, structures or characteristics may be combined in any suitable manner in one or more aspects.
本说明书提及和/或在任何申请数据表中列出的任何专利申请,专利,非专利公布或其它公开材料均以引用方式并入本文,只要所并入的材料在此不一致。因此,并且在必要的程度下,本文明确列出的公开内容代替以引用方式并入本文的任何冲突材料。据称以引用方式并入本文但与本文列出的现有定义、陈述或其它公开材料相冲突的任何材料或其部分,将仅在所并入的材料与现有的公开材料之间不产生冲突的程度下并入。Any patent applications, patents, non-patent publications or other publications mentioned in this specification and/or listed in any Application Data Sheet are incorporated herein by reference to the extent that the incorporated material is inconsistent herein. Accordingly, and to the extent necessary, the disclosure expressly set forth herein supersedes any conflicting material incorporated herein by reference. Any material, or portion thereof, that is said to be incorporated herein by reference but which conflicts with existing definitions, statements, or other disclosed material set forth herein will only not arise between the incorporated material and the existing disclosed material merged to the extent of conflict.
概括地说,已经描述了由采用本文所述的概念产生的许多有益效果。为了举例说明和描述的目的,已经提供了一个或多个形式的上述具体实施方式。这些具体实施方式并非意图为详尽的或限定到本发明所公开的精确形式。可以按照上述教导内容对本发明进行修改或变型。选择和描述的一个或多个形式是为了说明原理和实际应用,从而使本领域的普通技术人员能够利用适用于预期的特定用途的所述多个形式和多种修改形式。与此一同提交的权利要求书旨在限定完整范围。In general terms, a number of benefits have been described that result from employing the concepts described herein. The foregoing detailed description has been presented in one or more forms for the purposes of illustration and description. These detailed descriptions are not intended to be exhaustive or to be limited to the precise forms disclosed. Modifications and variations of the present invention are possible in light of the above teachings. The form or forms was chosen and described in order to illustrate principles and practical application, to thereby enable one of ordinary skill in the art to utilize the various forms and modifications as are suited to the particular use contemplated. The claims filed herewith are intended to define the full scope.
Claims (20)
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762611341P | 2017-12-28 | 2017-12-28 | |
| US201762611340P | 2017-12-28 | 2017-12-28 | |
| US201762611339P | 2017-12-28 | 2017-12-28 | |
| US62/611,339 | 2017-12-28 | ||
| US62/611,341 | 2017-12-28 | ||
| US62/611,340 | 2017-12-28 | ||
| US201862650898P | 2018-03-30 | 2018-03-30 | |
| US62/650,898 | 2018-03-30 | ||
| US16/024,090US20190201090A1 (en) | 2017-12-28 | 2018-06-29 | Capacitive coupled return path pad with separable array elements |
| US16/024,090 | 2018-06-29 | ||
| PCT/IB2018/057437WO2019130091A1 (en) | 2017-12-28 | 2018-09-26 | Capacitive coupled return path pad with separable array elements |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111601542Atrue CN111601542A (en) | 2020-08-28 |
| CN111601542B CN111601542B (en) | 2024-11-01 |
Family
ID=63878720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880084135.7AActiveCN111601542B (en) | 2017-12-28 | 2018-09-26 | Capacitively coupled return path pad with separable array elements |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP7263365B2 (en) |
| CN (1) | CN111601542B (en) |
| BR (1) | BR112020013233A2 (en) |
| WO (1) | WO2019130091A1 (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060085049A1 (en)* | 2004-10-20 | 2006-04-20 | Nervonix, Inc. | Active electrode, bio-impedance based, tissue discrimination system and methods of use |
| US20070161979A1 (en)* | 2006-01-12 | 2007-07-12 | Sherwood Services Ag | RF return pad current detection system |
| US20090234352A1 (en)* | 2008-03-17 | 2009-09-17 | Tyco Healthcare Group Lp | Variable Capacitive Electrode Pad |
| US20110230783A1 (en)* | 2007-10-18 | 2011-09-22 | Innovative Surgical Solutions, Llc | Neural event detection |
| CN103622725A (en)* | 2005-04-15 | 2014-03-12 | 塞基森斯公司 | Surgical instruments with sensors for detecting tissue properties, and systems using such instruments |
| CN105025970A (en)* | 2012-11-02 | 2015-11-04 | Vessix血管股份有限公司 | Flex circuit/balloon assemblies utilizing textured surfaces for enhanced bonding |
| US20150320478A1 (en)* | 2014-05-06 | 2015-11-12 | Chenes Llc | Electrosurgical generator |
| WO2017192377A1 (en)* | 2016-05-03 | 2017-11-09 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5523525Y2 (en)* | 1975-01-22 | 1980-06-05 | ||
| JPS57185848A (en)* | 1981-05-12 | 1982-11-16 | Olympus Optical Co | High frequency output apparatus for electric knife |
| US6582424B2 (en) | 1996-10-30 | 2003-06-24 | Megadyne Medical Products, Inc. | Capacitive reusable electrosurgical return electrode |
| US6053910A (en) | 1996-10-30 | 2000-04-25 | Megadyne Medical Products, Inc. | Capacitive reusable electrosurgical return electrode |
| US7722603B2 (en)* | 2006-09-28 | 2010-05-25 | Covidien Ag | Smart return electrode pad |
| US7995045B2 (en) | 2007-04-13 | 2011-08-09 | Ethicon Endo-Surgery, Inc. | Combined SBI and conventional image processor |
| US7982776B2 (en) | 2007-07-13 | 2011-07-19 | Ethicon Endo-Surgery, Inc. | SBI motion artifact removal apparatus and method |
| BRPI1007522A2 (en) | 2009-01-30 | 2016-02-16 | Univ Columbia | controllable magnetic source for intracorporeal device fixation |
| US9050093B2 (en) | 2009-10-09 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US10098527B2 (en) | 2013-02-27 | 2018-10-16 | Ethidcon Endo-Surgery, Inc. | System for performing a minimally invasive surgical procedure |
| US9345481B2 (en) | 2013-03-13 | 2016-05-24 | Ethicon Endo-Surgery, Llc | Staple cartridge tissue thickness sensor system |
| US10194973B2 (en) | 2015-09-30 | 2019-02-05 | Ethicon Llc | Generator for digitally generating electrical signal waveforms for electrosurgical and ultrasonic surgical instruments |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
- 2018
- 2018-09-26JPJP2020535495Apatent/JP7263365B2/enactiveActive
- 2018-09-26CNCN201880084135.7Apatent/CN111601542B/enactiveActive
- 2018-09-26BRBR112020013233-0Apatent/BR112020013233A2/enunknown
- 2018-09-26WOPCT/IB2018/057437patent/WO2019130091A1/ennot_activeCeased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060085049A1 (en)* | 2004-10-20 | 2006-04-20 | Nervonix, Inc. | Active electrode, bio-impedance based, tissue discrimination system and methods of use |
| CN103622725A (en)* | 2005-04-15 | 2014-03-12 | 塞基森斯公司 | Surgical instruments with sensors for detecting tissue properties, and systems using such instruments |
| US20070161979A1 (en)* | 2006-01-12 | 2007-07-12 | Sherwood Services Ag | RF return pad current detection system |
| US20110230783A1 (en)* | 2007-10-18 | 2011-09-22 | Innovative Surgical Solutions, Llc | Neural event detection |
| US20090234352A1 (en)* | 2008-03-17 | 2009-09-17 | Tyco Healthcare Group Lp | Variable Capacitive Electrode Pad |
| CN105025970A (en)* | 2012-11-02 | 2015-11-04 | Vessix血管股份有限公司 | Flex circuit/balloon assemblies utilizing textured surfaces for enhanced bonding |
| US20150320478A1 (en)* | 2014-05-06 | 2015-11-12 | Chenes Llc | Electrosurgical generator |
| WO2017192377A1 (en)* | 2016-05-03 | 2017-11-09 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111601542B (en) | 2024-11-01 |
| JP2021509038A (en) | 2021-03-18 |
| BR112020013233A2 (en) | 2020-12-01 |
| WO2019130091A1 (en) | 2019-07-04 |
| JP7263365B2 (en) | 2023-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12226151B2 (en) | Capacitive coupled return path pad with separable array elements | |
| JP7703825B2 (en) | Surgical instrument having flexible electrodes | |
| US12318152B2 (en) | Computer implemented interactive surgical systems | |
| EP3505125B1 (en) | Surgical instrument having a flexible electrode | |
| US20240173046A1 (en) | Surgical instrument having a flexible circuit | |
| CN111512391A (en) | Controller of robot-assisted surgical platform | |
| CN111566751A (en) | Communication arrangement for a robot-assisted surgical platform | |
| CN111527557A (en) | Adaptive Control Program Update for Surgical Hubs | |
| CN111527556A (en) | Adaptive Control Program Updates for Surgical Devices | |
| CN111527560A (en) | Distributed Processing of Surgical Systems | |
| CN111566749A (en) | Sensing arrangement for a robotic-assisted surgical platform | |
| JP7263364B2 (en) | Blocking energy due to accidental capacitive coupling | |
| JP7275144B2 (en) | Increasing radio frequency to generate unpadded unipolar loops | |
| JP7263365B2 (en) | Capacitively coupled return path pads with separable array elements | |
| JP7524432B2 (en) | Surgical Instrument Having a Flexible Circuit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |