CN111568308A - Charging seat searching method and device, sweeping equipment and readable storage medium - Google Patents
Charging seat searching method and device, sweeping equipment and readable storage mediumDownload PDFInfo
- Publication number
- CN111568308A CN111568308ACN201910122699.1ACN201910122699ACN111568308ACN 111568308 ACN111568308 ACN 111568308ACN 201910122699 ACN201910122699 ACN 201910122699ACN 111568308 ACN111568308 ACN 111568308A
- Authority
- CN
- China
- Prior art keywords
- charging
- sweeping
- charging seat
- charging base
- search
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A47L11/4005—Arrangements of batteries or cells; Electric power supply arrangements
Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请涉及计算机技术领域,具体而言,本申请涉及一种充电座的搜寻方法、装置、扫地设备及计算机可读存储介质。The present application relates to the field of computer technology, and in particular, the present application relates to a search method, device, cleaning device, and computer-readable storage medium for a charging stand.
背景技术Background technique
随着社会的发展以及科技的进步,智能技术随之发展,扫地设备应运而生,用户开始使用扫地设备清洁卫生代替人工清洁卫生,扫地设备通过在地面上移动,以清洁卫生。扫地设备在工作的过程中,当电量低于某一阀值时,需要返回充电座位置进行充电。With the development of society and the advancement of science and technology, intelligent technology has developed, and sweeping equipment has emerged as the times require. Users have begun to use sweeping equipment to clean and sanitize instead of manual cleaning. The sweeping equipment moves on the ground to clean and sanitize. During the operation of the sweeping equipment, when the power is lower than a certain threshold, it needs to return to the charging seat for charging.
由于充电座的识别和对位范围十分小,扫地设备只有在充电座所处位置很小范围内才能完成识别和对位,最终完成回充工作。当扫地设备没有检测到充电座的具体位置时,可能会漫无目的搜寻,十分耗时,并且有些扫地设备设置了搜寻充电座的时间,一定时间长度内未搜寻到充电座则会放弃搜寻,导致回充失败。Since the identification and alignment range of the charging base is very small, the sweeping equipment can only complete the identification and alignment within a small range of the charging base, and finally complete the recharging work. When the sweeping device does not detect the specific location of the charging base, it may search aimlessly, which is very time-consuming, and some sweeping devices set a time to search for the charging base. If the charging base is not found within a certain period of time, the search will be abandoned. cause the recharge to fail.
发明内容SUMMARY OF THE INVENTION
本申请针对现有的方式的缺点,提出一种充电座的搜寻方法、装置、扫地设备及计算机可读存储介质,用以解决如何实现扫地设备有目的性的搜寻充电座,从而提高充电座的搜寻效率的问题。In view of the shortcomings of the existing methods, the present application proposes a search method, device, cleaning device, and computer-readable storage medium for a charging stand, so as to solve how to realize a purposeful search for a charging stand by a cleaning device, thereby improving the performance of the charging stand. The problem of search efficiency.
第一方面,本申请提供了一种充电座的搜寻方法,应用于扫地设备,扫地设备上设置若干个搜寻检测部件,包括:In a first aspect, the present application provides a method for searching for a charging base, which is applied to a sweeping device, where several search and detection components are set on the sweeping device, including:
当没有检测到充电座的具体位置时,控制扫地设备沿与工作地图的边界平行的方向行进;When the specific location of the charging stand is not detected, control the sweeping device to travel in a direction parallel to the boundary of the working map;
当通过第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围;When receiving the infrared signal emitted by the charging base through the first search and detection component, determine the position range of the charging base;
根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,以确定充电座的具体位置。According to the position range of the charging base, the second searching and detecting component is controlled to guide and align, so as to determine the specific position of the charging base.
可选地,控制扫地设备沿与工作地图的边界平行的方向行进,包括:Optionally, controlling the sweeping device to travel in a direction parallel to the boundary of the work map, including:
控制扫地设备与工作地图的边界之间保持预设的第一距离;Control the sweeping equipment to maintain a preset first distance between the boundary of the work map;
根据预设的第一距离,确定扫地设备的第一转动信息,第一转动信息包括转动角度和/或转动方式;determining the first rotation information of the sweeping device according to the preset first distance, where the first rotation information includes the rotation angle and/or the rotation mode;
根据第一转动信息,控制扫地设备沿与工作地图的外边界平行的方向行进。According to the first rotation information, the sweeping device is controlled to travel in a direction parallel to the outer boundary of the work map.
可选地,当第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围,包括:Optionally, when the first search and detection component receives the infrared signal emitted by the charging base, determine the position range of the charging base, including:
当设置于扫地设备任一侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。When the first search and detection component disposed on either side of the sweeping device receives the infrared signal emitted by the charging base, the position range of the charging base is determined.
可选地,充电座包括四个传感器,四个传感器处于同一水平线上,根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,确定充电座的具体位置,包括:Optionally, the charging base includes four sensors, and the four sensors are on the same horizontal line. According to the position range of the charging base, the second searching and detecting component is controlled to guide and align, and the specific position of the charging base is determined, including:
根据充电座的位置范围,控制扫地设备行进到与充电座的距离小于预设的第二距离,控制设置于扫地设备正前方的第二搜寻检测部件检测到充电座的四个传感器中位于中间位置的两个传感器发送的红外信号;According to the position range of the charging base, the sweeping device is controlled to travel to a distance less than a preset second distance from the charging base, and the second search and detection component located in front of the sweeping device is controlled to detect that the four sensors of the charging base are located in the middle position. The infrared signal sent by the two sensors;
根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息;According to the infrared signals sent by the two sensors in the middle position, the positioning indication information of the charging base is obtained;
根据充电座的定位指示信息,确定充电座的具体位置。Determine the specific location of the charging base according to the positioning indication information of the charging base.
可选地,根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息,包括:Optionally, according to the infrared signals sent by the two sensors located in the middle position, the positioning indication information of the charging stand is obtained, including:
根据位于中间位置的两个传感器发送的红外信号,确定扫地设备的第二转动信息;Determine the second rotation information of the sweeping device according to the infrared signals sent by the two sensors in the middle position;
根据扫地设备的第二转动信息,控制扫地设备行进到与充电座的距离小于预设的第三距离时,得到充电座的定位指示信息;According to the second rotation information of the sweeping device, when the sweeping device is controlled to travel to a distance less than a preset third distance from the charging base, the positioning indication information of the charging base is obtained;
定位指示信息包括条码信息。The positioning indication information includes barcode information.
可选地,第一搜寻检测部件、第二搜寻检测部件中任一项包括红外回充接收传感器。Optionally, any one of the first search detection component and the second search detection component includes an infrared recharge receiving sensor.
第二方面,本申请提供了一种充电座的搜寻装置,应用于扫地设备,扫地设备上设置若干个搜寻检测部件,包括:In a second aspect, the present application provides a search device for a charging base, which is applied to a sweeping device, where several search and detection components are set on the sweeping device, including:
第一处理模块,用于当没有检测到充电座的具体位置时,控制扫地设备沿与工作地图的边界平行的方向行进;a first processing module, configured to control the sweeping device to travel in a direction parallel to the boundary of the working map when the specific location of the charging stand is not detected;
第二处理模块,用于当通过第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围;a second processing module, configured to determine the position range of the charging base when the infrared signal emitted by the charging base is received through the first search and detection component;
第三处理模块,用于根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,以确定充电座的具体位置。The third processing module is used for controlling the second searching and detecting component to guide and align according to the position range of the charging base, so as to determine the specific position of the charging base.
可选地,第一处理模块,用于控制扫地设备与工作地图的边界之间保持预设的第一距离;根据预设的第一距离,确定扫地设备的第一转动信息,第一转动信息包括转动角度和/或转动方式;根据第一转动信息,控制扫地设备沿与工作地图的外边界平行的方向行进。Optionally, the first processing module is used to control a preset first distance between the sweeping device and the boundary of the working map; according to the preset first distance, determine the first rotation information of the sweeping device, the first rotation information Including the rotation angle and/or rotation mode; according to the first rotation information, the sweeping device is controlled to travel in a direction parallel to the outer boundary of the work map.
可选地,第二处理模块,用于当设置于扫地设备任一侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。Optionally, the second processing module is configured to determine the position range of the charging base when the first search and detection component disposed on either side of the sweeping device receives the infrared signal emitted by the charging base.
可选地,充电座包括四个传感器,四个传感器处于同一水平线上,包括:Optionally, the charging stand includes four sensors, and the four sensors are on the same horizontal line, including:
第三处理模块,用于根据充电座的位置范围,控制扫地设备行进到与充电座的距离小于预设的第二距离,控制设置于扫地设备正前方的第二搜寻检测部件检测到充电座的四个传感器中位于中间位置的两个传感器发送的红外信号;根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息;根据充电座的定位指示信息,确定充电座的具体位置。The third processing module is configured to, according to the position range of the charging base, control the sweeping device to travel to a distance less than a preset second distance from the charging base, and control the second search and detection component disposed directly in front of the sweeping device to detect the presence of the charging base. Infrared signals sent by two sensors located in the middle position among the four sensors; according to the infrared signals sent by the two sensors located in the middle position, the positioning indication information of the charging base is obtained; according to the positioning indication information of the charging base, the specific charging base is determined. Location.
可选地,第三处理模块,用于根据位于中间位置的两个传感器发送的红外信号,确定扫地设备的第二转动信息;根据扫地设备的第二转动信息,控制扫地设备行进到与充电座的距离小于预设的第三距离时,得到充电座的定位指示信息;定位指示信息包括条码信息。Optionally, the third processing module is used to determine the second rotation information of the sweeping device according to the infrared signals sent by the two sensors located in the middle position; When the distance is less than the preset third distance, the positioning indication information of the charging stand is obtained; the positioning indication information includes barcode information.
可选地,第一搜寻检测部件、第二搜寻检测部件中任一项包括红外回充接收传感器。Optionally, any one of the first search detection component and the second search detection component includes an infrared recharge receiving sensor.
第三方面,本申请提供了一种扫地设备,包括:处理器、存储器和总线;In a third aspect, the present application provides a floor sweeping device, including: a processor, a memory, and a bus;
总线,用于连接处理器和存储器;bus, used to connect the processor and memory;
存储器,用于存储操作指令;memory for storing operation instructions;
处理器,用于通过调用操作指令,执行本申请第一方面的充电座的搜寻方法。The processor is configured to execute the searching method for the charging base of the first aspect of the present application by invoking the operation instruction.
第四方面,本申请提供了一种计算机可读存储介质,存储有计算机程序,计算机程序被用于执行本申请第一方面的充电座的搜寻方法。In a fourth aspect, the present application provides a computer-readable storage medium storing a computer program, and the computer program is used to execute the method for searching for a charging stand according to the first aspect of the present application.
本申请实施例提供的技术方案,至少具有如下有益效果:The technical solutions provided in the embodiments of the present application have at least the following beneficial effects:
通过控制扫地设备沿与工作地图的边界平行的方向行进,控制第一搜寻检测部件接收到充电座发射的红外信号,确定充电座的位置范围,控制第二搜寻检测部件进行引导对准,确定充电座的具体位置,实现扫地设备有目的性的搜寻充电座,从而提高了充电座的搜寻效率。By controlling the sweeping equipment to travel in a direction parallel to the boundary of the working map, the first search and detection unit is controlled to receive the infrared signal emitted by the charging base, the position range of the charging base is determined, the second search and detection unit is controlled to guide and align, and the charging position is determined. The specific position of the seat can be used to realize the purposeful search for the charging seat by the sweeping device, thereby improving the search efficiency of the charging seat.
本申请附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本申请的实践了解到。Additional aspects and advantages of the present application will be set forth in part in the following description, which will become apparent from the following description, or may be learned by practice of the present application.
附图说明Description of drawings
为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例描述中所需要使用的附图作简单地介绍。In order to illustrate the technical solutions in the embodiments of the present application more clearly, the following briefly introduces the accompanying drawings that need to be used in the description of the embodiments of the present application.
图1为本申请实施例提供的一种充电座的搜寻方法的流程示意图;FIG. 1 is a schematic flowchart of a method for searching for a charging stand according to an embodiment of the present application;
图2为本申请实施例提供的另一种充电座的搜寻方法的流程示意图;FIG. 2 is a schematic flowchart of another method for searching for a charging base according to an embodiment of the present application;
图3为本申请实施例提供的充电座的搜寻的工作路线示意图;FIG. 3 is a schematic diagram of a working route for searching for a charging stand according to an embodiment of the present application;
图4为本申请实施例提供的一种充电座的搜寻装置的结构示意图;FIG. 4 is a schematic structural diagram of a search device for a charging stand according to an embodiment of the present application;
图5为本申请实施例提供的一种扫地设备的结构示意图。FIG. 5 is a schematic structural diagram of a sweeping device according to an embodiment of the present application.
具体实施方式Detailed ways
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本申请,而不能解释为对本发明的限制。The following describes in detail the embodiments of the present application, examples of which are illustrated in the accompanying drawings, wherein the same or similar reference numerals refer to the same or similar elements or elements having the same or similar functions throughout. The embodiments described below with reference to the accompanying drawings are exemplary and are only used to explain the present application, but not to be construed as limiting the present invention.
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本申请的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。It will be understood by those skilled in the art that the singular forms "a", "an", "the" and "the" as used herein can include the plural forms as well, unless expressly stated otherwise. It should be further understood that the word "comprising" used in the specification of this application refers to the presence of stated features, integers, steps, operations, elements and/or components, but does not preclude the presence or addition of one or more other features, Integers, steps, operations, elements, components and/or groups thereof. It will be understood that when we refer to an element as being "connected" or "coupled" to another element, it can be directly connected or coupled to the other element or intervening elements may also be present. Furthermore, "connected" or "coupled" as used herein may include wirelessly connected or wirelessly coupled. As used herein, the term "and/or" includes all or any element and all combination of one or more of the associated listed items.
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。It will be understood by those skilled in the art that, unless otherwise defined, all terms (including technical and scientific terms) used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. It should also be understood that terms, such as those defined in a general dictionary, should be understood to have meanings consistent with their meanings in the context of the prior art and, unless specifically defined as herein, should not be interpreted in idealistic or overly formal meaning to explain.
下面以具体地实施例对本申请的技术方案以及本申请的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本申请的实施例进行描述。The technical solutions of the present application and how the technical solutions of the present application solve the above-mentioned technical problems will be described in detail below with specific examples. The following specific embodiments may be combined with each other, and the same or similar concepts or processes may not be repeated in some embodiments. The embodiments of the present application will be described below with reference to the accompanying drawings.
实施例一Example 1
本申请实施例中提供了一种充电座的搜寻方法,应用于扫地设备,扫地设备上设置若干个搜寻检测部件,该方法的流程示意图如图1所示,该方法包括:An embodiment of the present application provides a method for searching for a charging stand, which is applied to a sweeping device, where several searching and detecting components are set on the sweeping device. A schematic flowchart of the method is shown in FIG. 1 , and the method includes:
S101,当没有检测到充电座的具体位置时,控制扫地设备沿与工作地图的边界平行的方向行进。S101, when the specific location of the charging stand is not detected, control the sweeping device to travel in a direction parallel to the boundary of the work map.
S102,当通过第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。S102, when the infrared signal emitted by the charging stand is received through the first search and detection component, determine the position range of the charging stand.
S103,根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,以确定充电座的具体位置。S103 , according to the position range of the charging base, control the second search and detection component to perform guiding and alignment, so as to determine the specific position of the charging base.
本申请实施例中,当没有检测到充电座的具体位置时,控制扫地设备沿与工作地图的边界平行的方向行进;当通过第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围;根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,以确定充电座的具体位置。如此,实现扫地设备有目的性的搜寻充电座,从而提高了充电座的搜寻效率。In the embodiment of the present application, when the specific position of the charging stand is not detected, the sweeping device is controlled to travel in a direction parallel to the boundary of the working map; when the infrared signal emitted by the charging stand is received through the first search and detection component, the charging stand is determined to be charged. The position range of the base; according to the position range of the charging base, the second search and detection component is controlled to guide and align to determine the specific position of the charging base. In this way, the cleaning device can purposefully search for the charging base, thereby improving the search efficiency of the charging base.
可选地,控制扫地设备沿与工作地图的边界平行的方向行进,包括:Optionally, controlling the sweeping device to travel in a direction parallel to the boundary of the work map, including:
控制扫地设备与工作地图的边界之间保持预设的第一距离;Control the sweeping equipment to maintain a preset first distance between the boundary of the work map;
根据预设的第一距离,确定扫地设备的第一转动信息,第一转动信息包括转动角度和/或转动方式;determining the first rotation information of the sweeping device according to the preset first distance, where the first rotation information includes the rotation angle and/or the rotation mode;
根据第一转动信息,控制扫地设备沿与工作地图的外边界平行的方向行进。According to the first rotation information, the sweeping device is controlled to travel in a direction parallel to the outer boundary of the work map.
可选地,当第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围,包括:Optionally, when the first search and detection component receives the infrared signal emitted by the charging base, determine the position range of the charging base, including:
当设置于扫地设备任一侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。When the first search and detection component disposed on either side of the sweeping device receives the infrared signal emitted by the charging base, the position range of the charging base is determined.
可选地,充电座包括四个传感器,四个传感器处于同一水平线上,根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,确定充电座的具体位置,包括:Optionally, the charging base includes four sensors, and the four sensors are on the same horizontal line. According to the position range of the charging base, the second searching and detecting component is controlled to guide and align, and the specific position of the charging base is determined, including:
根据充电座的位置范围,控制扫地设备行进到与充电座的距离小于预设的第二距离,控制设置于扫地设备正前方的第二搜寻检测部件检测到充电座的四个传感器中位于中间位置的两个传感器发送的红外信号;According to the position range of the charging base, the sweeping device is controlled to travel to a distance less than a preset second distance from the charging base, and the second search and detection component located in front of the sweeping device is controlled to detect that the four sensors of the charging base are located in the middle position. The infrared signal sent by the two sensors;
根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息;According to the infrared signals sent by the two sensors in the middle position, the positioning indication information of the charging base is obtained;
根据充电座的定位指示信息,确定充电座的具体位置。Determine the specific location of the charging base according to the positioning indication information of the charging base.
可选地,根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息,包括:Optionally, according to the infrared signals sent by the two sensors located in the middle position, the positioning indication information of the charging stand is obtained, including:
根据位于中间位置的两个传感器发送的红外信号,确定扫地设备的第二转动信息;Determine the second rotation information of the sweeping device according to the infrared signals sent by the two sensors in the middle position;
根据扫地设备的第二转动信息,控制扫地设备行进到与充电座的距离小于预设的第三距离时,得到充电座的定位指示信息;According to the second rotation information of the sweeping device, when the sweeping device is controlled to travel to a distance less than a preset third distance from the charging base, the positioning indication information of the charging base is obtained;
定位指示信息包括条码信息。The positioning indication information includes barcode information.
可选地,第一搜寻检测部件、第二搜寻检测部件中任一项包括红外回充接收传感器。Optionally, any one of the first search detection component and the second search detection component includes an infrared recharge receiving sensor.
实施例二Embodiment 2
基于前述实施例一相同的发明构思,本实施例通过具体示例对上述实施例一的技术方案进行说明。Based on the same inventive concept of the foregoing Embodiment 1, this embodiment describes the technical solution of the foregoing Embodiment 1 through specific examples.
参见图2,图2为本申请实施例提供的另一种充电座的搜寻方法的流程示意图,如图2所示,该方法应用于扫地设备,该方法具体包括:Referring to FIG. 2, FIG. 2 is a schematic flowchart of another method for searching for a charging base provided by an embodiment of the present application. As shown in FIG. 2, the method is applied to a sweeping device, and the method specifically includes:
S201,当没有检测到充电座的具体位置时,控制扫地设备与工作地图的边界之间保持预设的第一距离。S201, when the specific position of the charging stand is not detected, control the cleaning device to maintain a preset first distance between the boundary of the working map.
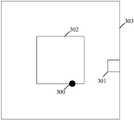
具体地,如图3所示,图3中包括扫地设备300、充电座301、扫地设备行进路线302、房间墙面边界(工作地图的边界)303;充电座301设置在房间墙面边界(工作地图的边界)303旁;扫地设备行进路线302与房间墙面边界(工作地图的边界)303平行。Specifically, as shown in FIG. 3, FIG. 3 includes a
控制扫地设备300与房间墙面边界(工作地图的边界)303之间保持预设的第一距离,可选地,第一距离取值为2米。The
S202,根据预设的第一距离,确定扫地设备的第一转动信息。S202: Determine first rotation information of the sweeping device according to a preset first distance.
具体地,根据预设的第一距离,确定扫地设备300的第一转动信息。可选地,第一转动信息包括转动角度和/或转动方式,控制扫地设备300的轮子顺时针旋转或逆时针旋转,转动角度为锐角、直角、钝角中任意一种。Specifically, the first rotation information of the
S203,根据第一转动信息,控制扫地设备沿与工作地图的外边界平行的方向行进。S203, according to the first rotation information, control the sweeping device to travel in a direction parallel to the outer boundary of the work map.
具体地,根据第一转动信息,控制扫地设备300沿扫地设备行进路线302与房间墙面边界(工作地图的边界)303平行的方向行进。Specifically, according to the first rotation information, the
S204,当设置于扫地设备任一侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。S204, when the first search and detection component disposed on either side of the sweeping device receives the infrared signal emitted by the charging base, determine the position range of the charging base.
具体地,当设置于扫地设备右侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。Specifically, when the first search and detection component disposed on the right side of the sweeping device receives the infrared signal emitted by the charging base, the position range of the charging base is determined.
可选地,第一搜寻检测部件包括红外回充接收传感器,充电座301包括四个红外传感器,四个红外传感器处于同一水平线上。Optionally, the first search and detection component includes an infrared recharging receiving sensor, and the charging
具体地,扫地设备300右侧面的第一搜寻检测部件接收到的充电座301的红外信号,确定扫地设备300与充电座301的距离;当扫地设备300与充电座301的距离大于等于预设的第二距离时,可以确定扫地设备300接收到充电座301的两侧红外传感器的信号,从而确定充电座的位置范围。Specifically, the infrared signal of the charging
可选地,第二距离取值为1.5米。Optionally, the second distance takes a value of 1.5 meters.
S205,根据充电座的位置范围,控制扫地设备行进到与充电座的距离小于预设的第二距离,检测到充电座的四个传感器中位于中间位置的两个传感器发送的红外信号。S205 , according to the position range of the charging base, control the sweeping device to travel to a distance less than a preset second distance from the charging base, and detect infrared signals sent by two sensors located in the middle among the four sensors of the charging base.
具体地,根据充电座301的位置范围,控制扫地设备300行进到与充电座301的距离小于预设的第二距离,控制设置于扫地设备300正前方的第二搜寻检测部件检测到充电座301的四个红外传感器中位于中间位置的两个红外传感器发送的红外信号。当扫地设备300与充电座301的距离小于预设的第二距离时,扫地设备300能接收到充电座301的中间两个红外传感器的信号。Specifically, according to the position range of the charging
可选地,第二搜寻检测部件包括红外回充接收传感器。Optionally, the second search and detection component includes an infrared recharge receiving sensor.
S206,根据位于充电座中间位置的两个传感器发送的红外信号,确定扫地设备的第二转动信息。S206, according to the infrared signals sent by the two sensors located in the middle of the charging base, determine the second rotation information of the cleaning device.
具体地,根据位于充电座301中间位置的两个红外传感器发送的红外信号,确定扫地设备300的轮子朝着充电座301的方向顺时针旋转。Specifically, according to the infrared signals sent by the two infrared sensors located in the middle of the charging
可选地,第二转动信息包括转动角度和/或转动方式,控制扫地设备300的轮子顺时针旋转或逆时针旋转,转动角度为锐角、直角、钝角中任意一种。Optionally, the second rotation information includes a rotation angle and/or a rotation mode, the wheels of the
S207,根据扫地设备的第二转动信息,控制扫地设备行进到与充电座的距离小于预设的第三距离,得到充电座的定位指示信息。S207 , according to the second rotation information of the sweeping device, control the sweeping device to travel to a distance less than a preset third distance from the charging base, and obtain positioning indication information of the charging base.
具体地,根据扫地设备300的第二转动信息,控制扫地设备300行进到与充电座301的距离小于预设的第三距离,控制扫地设备300的第二搜寻检测部件得到充电座的定位指示信息。Specifically, according to the second rotation information of the
可选地,第三距离取值为1米,定位指示信息包括条码信息。Optionally, the value of the third distance is 1 meter, and the positioning indication information includes barcode information.
S208,根据充电座的定位指示信息,确定充电座的具体位置。S208: Determine the specific location of the charging stand according to the positioning indication information of the charging stand.
本申请实施例通过控制扫地设备沿与工作地图的边界平行的方向行进,控制第一搜寻检测部件接收到充电座发射的红外信号,确定充电座的位置范围,控制第二搜寻检测部件进行引导对准,确定充电座的具体位置,实现扫地设备有目的性的搜寻充电座,从而提高了充电座的搜寻效率。In this embodiment of the present application, the sweeping equipment is controlled to travel in a direction parallel to the boundary of the working map, the first search and detection component is controlled to receive the infrared signal emitted by the charging stand, the position range of the charging stand is determined, and the second search and detection component is controlled to guide the Accurate, determine the specific position of the charging base, and realize the purposeful search of the charging base by the sweeping equipment, thereby improving the search efficiency of the charging base.
实施例三Embodiment 3
基于相同的发明构思,本申请实施例还提供了一种充电座的搜寻装置,该装置的结构示意图如图4所示,充电座的搜寻装置40,应用于扫地设备,扫地设备上设置若干个搜寻检测部件;充电座的搜寻装置40,包括第一处理模块401、第二处理模块402和第三处理模块403。Based on the same inventive concept, an embodiment of the present application also provides a search device for a charging stand. The schematic structural diagram of the device is shown in FIG. 4 . The
第一处理模块401,用于当没有检测到充电座的具体位置时,控制扫地设备沿与工作地图的边界平行的方向行进;The
第二处理模块402,用于当通过第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围;The
第三处理模块403,用于根据充电座的位置范围,控制第二搜寻检测部件进行引导对准,以确定充电座的具体位置。The
可选地,第一处理模块401,用于控制扫地设备与工作地图的边界之间保持预设的第一距离;根据预设的第一距离,确定扫地设备的第一转动信息,第一转动信息包括转动角度和/或转动方式;根据第一转动信息,控制扫地设备沿与工作地图的外边界平行的方向行进。Optionally, the
可选地,第二处理模块402,用于当设置于扫地设备任一侧面的第一搜寻检测部件接收到充电座发射的红外信号时,确定充电座的位置范围。Optionally, the
可选地,充电座包括四个传感器,四个传感器处于同一水平线上,包括:Optionally, the charging stand includes four sensors, and the four sensors are on the same horizontal line, including:
第三处理模块403,用于根据充电座的位置范围,控制扫地设备行进到与充电座的距离小于预设的第二距离,控制设置于扫地设备正前方的第二搜寻检测部件检测到充电座的四个传感器中位于中间位置的两个传感器发送的红外信号;根据位于中间位置的两个传感器发送的红外信号,得到充电座的定位指示信息;根据充电座的定位指示信息,确定充电座的具体位置。The
可选地,第三处理模块403,用于根据位于中间位置的两个传感器发送的红外信号,确定扫地设备的第二转动信息;根据扫地设备的第二转动信息,控制扫地设备行进到与充电座的距离小于预设的第三距离时,得到充电座的定位指示信息;定位指示信息包括条码信息。Optionally, the
可选地,第一搜寻检测部件、第二搜寻检测部件中任一项包括红外回充接收传感器。Optionally, any one of the first search detection component and the second search detection component includes an infrared recharge receiving sensor.
本申请实施例提供的充电座的搜寻装置中未详述的内容,可参照上述充电座的搜寻方法,本申请实施例提供的充电座的搜寻装置能够达到的有益效果与上述充电座的搜寻方法相同,在此不再赘述。For the content not described in detail in the searching device for a charging stand provided by the embodiment of the present application, reference may be made to the searching method for the charging stand above. are the same and will not be repeated here.
基于相同的发明构思,本申请实施例还提供了一种扫地设备,该电子设备的结构示意图如图5所示,该电子设备5000包括至少一个处理器5001、存储器5002和总线5003,至少一个处理器5001均与存储器5002电连接;存储器5002被配置用于存储有至少一个计算机可执行指令,处理器5001被配置用于执行该至少一个计算机可执行指令,从而执行如本申请实施例一至二中任意一个实施例或任意一种可选实施方式提供的任意一种充电座的搜寻方法的步骤。Based on the same inventive concept, an embodiment of the present application also provides a sweeping device. The schematic structural diagram of the electronic device is shown in FIG. 5 . The
进一步,处理器5001可以是FPGA(Field-Programmable Gate Array,现场可编程门阵列)或者其它具有逻辑处理能力的器件,如MCU(Microcontroller Unit,微控制单元)、CPU(Central Process Unit,中央处理器)。Further, the
基于相同的发明构思,本申请实施例还提供了一种计算机可读存储介质,存储有计算机程序,该计算机程序用于被处理器执行时实现本申请实施例一至二中任意一个实施例或任意一种充电座的搜寻方法的步骤。Based on the same inventive concept, an embodiment of the present application further provides a computer-readable storage medium storing a computer program, and the computer program is used to implement any one or any one of the first to second embodiments of the present application when executed by a processor. The steps of a searching method for a charging base.
本申请实施例提供的计算机可读存储介质包括但不限于任何类型的盘(包括软盘、硬盘、光盘、CD-ROM、和磁光盘)、ROM(Read-Only Memory,只读存储器)、RAM(RandomAccess Memory,随即存储器)、EPROM(Erasable Programmable Read-Only Memory,可擦写可编程只读存储器)、EEPROM(Electrically Erasable Programmable Read-Only Memory,电可擦可编程只读存储器)、闪存、磁性卡片或光线卡片。也就是,可读存储介质包括由设备(例如,计算机)以能够读的形式存储或传输信息的任何介质。The computer-readable storage media provided by the embodiments of the present application include, but are not limited to, any type of disk (including floppy disk, hard disk, optical disk, CD-ROM, and magneto-optical disk), ROM (Read-Only Memory, read-only memory), RAM ( RandomAccess Memory), EPROM (Erasable Programmable Read-Only Memory), EEPROM (Electrically Erasable Programmable Read-Only Memory), flash memory, magnetic card or light cards. That is, a readable storage medium includes any medium that stores or transmits information in a form readable by a device (eg, a computer).
应用本申请实施例,至少具有如下有益效果:The application of the embodiment of the present application has at least the following beneficial effects:
通过控制扫地设备沿与工作地图的边界平行的方向行进,控制第一搜寻检测部件接收到充电座发射的红外信号,确定充电座的位置范围,控制第二搜寻检测部件进行引导对准,确定充电座的具体位置,实现扫地设备有目的性的搜寻充电座,从而提高了充电座的搜寻效率。By controlling the sweeping equipment to travel in a direction parallel to the boundary of the working map, the first search and detection unit is controlled to receive the infrared signal emitted by the charging base, the position range of the charging base is determined, the second search and detection unit is controlled to guide and align, and the charging position is determined. The specific position of the seat can be used to realize the purposeful search for the charging seat by the sweeping device, thereby improving the search efficiency of the charging seat.
本技术领域技术人员可以理解,可以用计算机程序指令来实现这些结构图和/或框图和/或流图中的每个框以及这些结构图和/或框图和/或流图中的框的组合。本技术领域技术人员可以理解,可以将这些计算机程序指令提供给通用计算机、专业计算机或其他可编程数据处理方法的处理器来实现,从而通过计算机或其他可编程数据处理方法的处理器来执行本申请公开的结构图和/或框图和/或流图的框或多个框中指定的方案。Those skilled in the art will understand that computer program instructions can be used to implement each block of these structural diagrams and/or block diagrams and/or flow diagrams, and combinations of blocks in these structural diagrams and/or block diagrams and/or flow diagrams . Those skilled in the art can understand that these computer program instructions can be provided to a general-purpose computer, a professional computer or a processor of other programmable data processing methods to implement, so that the present invention can be executed by a processor of a computer or other programmable data processing method. The block or blocks specified in the block or blocks of the block diagrams and/or block diagrams and/or flow diagrams disclosed in the application.
本技术领域技术人员可以理解,本申请中已经讨论过的各种操作、方法、流程中的步骤、措施、方案可以被交替、更改、组合或删除。进一步地,具有本申请中已经讨论过的各种操作、方法、流程中的其他步骤、措施、方案也可以被交替、更改、重排、分解、组合或删除。进一步地,现有技术中的具有与本申请中公开的各种操作、方法、流程中的步骤、措施、方案也可以被交替、更改、重排、分解、组合或删除。Those skilled in the art can understand that various operations, methods, steps, measures, and solutions in the process discussed in this application may be alternated, modified, combined or deleted. Further, other steps, measures, and solutions in the various operations, methods, and processes that have been discussed in this application may also be alternated, modified, rearranged, decomposed, combined, or deleted. Further, steps, measures and solutions in the prior art with various operations, methods, and processes disclosed in this application may also be alternated, modified, rearranged, decomposed, combined or deleted.
以上所述仅是本申请的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。The above are only part of the embodiments of the present application. It should be pointed out that for those skilled in the art, without departing from the principles of the present application, several improvements and modifications can also be made. It should be regarded as the protection scope of this application.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910122699.1ACN111568308B (en) | 2019-02-19 | 2019-02-19 | Search method, device, sweeping device and readable storage medium for charging stand |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910122699.1ACN111568308B (en) | 2019-02-19 | 2019-02-19 | Search method, device, sweeping device and readable storage medium for charging stand |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111568308Atrue CN111568308A (en) | 2020-08-25 |
| CN111568308B CN111568308B (en) | 2023-02-17 |
Family
ID=72113256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910122699.1AActiveCN111568308B (en) | 2019-02-19 | 2019-02-19 | Search method, device, sweeping device and readable storage medium for charging stand |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111568308B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111772544A (en)* | 2020-06-28 | 2020-10-16 | 深圳拓邦股份有限公司 | Sweeper recharging candidate point generation method and device and sweeper recharging system |
| CN113625226A (en)* | 2021-08-05 | 2021-11-09 | 美智纵横科技有限责任公司 | Position determination method and device, household appliance and storage medium |
| CN114680744A (en)* | 2020-12-31 | 2022-07-01 | 星络智能科技有限公司 | Computer-readable storage medium, sweeping robot and control method thereof |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104765379A (en)* | 2014-11-11 | 2015-07-08 | 深圳市银星智能科技股份有限公司 | Method for robot to look for recharge base in enclosed work area and robot system |
| CN105700522A (en)* | 2014-11-11 | 2016-06-22 | 沈阳新松机器人自动化股份有限公司 | Robot charging method and charging system thereof |
| CN206684574U (en)* | 2017-04-01 | 2017-11-28 | 珠海市一微半导体有限公司 | A kind of mobile robot recharges control system |
| US20180284800A1 (en)* | 2017-04-01 | 2018-10-04 | Fu Tai Hua Industry (Shenzhen) Co., Ltd. | Electronic device and route searching method therefor |
| CN109062207A (en)* | 2018-08-01 | 2018-12-21 | 深圳乐动机器人有限公司 | Localization method, device, robot and the storage medium of cradle |
- 2019
- 2019-02-19CNCN201910122699.1Apatent/CN111568308B/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104765379A (en)* | 2014-11-11 | 2015-07-08 | 深圳市银星智能科技股份有限公司 | Method for robot to look for recharge base in enclosed work area and robot system |
| CN105700522A (en)* | 2014-11-11 | 2016-06-22 | 沈阳新松机器人自动化股份有限公司 | Robot charging method and charging system thereof |
| CN206684574U (en)* | 2017-04-01 | 2017-11-28 | 珠海市一微半导体有限公司 | A kind of mobile robot recharges control system |
| US20180284800A1 (en)* | 2017-04-01 | 2018-10-04 | Fu Tai Hua Industry (Shenzhen) Co., Ltd. | Electronic device and route searching method therefor |
| CN109062207A (en)* | 2018-08-01 | 2018-12-21 | 深圳乐动机器人有限公司 | Localization method, device, robot and the storage medium of cradle |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111772544A (en)* | 2020-06-28 | 2020-10-16 | 深圳拓邦股份有限公司 | Sweeper recharging candidate point generation method and device and sweeper recharging system |
| CN111772544B (en)* | 2020-06-28 | 2022-01-04 | 深圳拓邦股份有限公司 | Sweeper recharging candidate point generation method and device and sweeper recharging system |
| CN114680744A (en)* | 2020-12-31 | 2022-07-01 | 星络智能科技有限公司 | Computer-readable storage medium, sweeping robot and control method thereof |
| CN113625226A (en)* | 2021-08-05 | 2021-11-09 | 美智纵横科技有限责任公司 | Position determination method and device, household appliance and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111568308B (en) | 2023-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111568308A (en) | Charging seat searching method and device, sweeping equipment and readable storage medium | |
| JP2009204590A5 (en) | ||
| CN108106620B (en) | A topology road matching method, system and electronic device | |
| US20140005855A1 (en) | Device and method for calculating a remaining mileage of an electric vehicle | |
| CN112690710B (en) | Obstacle trafficability judging method, obstacle trafficability judging device, computer device, and storage medium | |
| CN106228841A (en) | A kind of City-level parking induction method, device and electronic equipment | |
| CN109583505A (en) | A kind of object correlating method, device, equipment and the medium of multisensor | |
| CN106169253B (en) | Parking lot idle condition prediction technique and system based on parking difficulty | |
| CN113063442B (en) | Method and device for calibrating gyroscope of sweeping robot, computer equipment and memory | |
| CN104123786A (en) | Paper money blockage judging system and paper money blockage judging method | |
| CN106289282A (en) | A kind of indoor map pedestrian's track matching method | |
| CN112904851B (en) | Obstacle position correction method, system, computer equipment and storage medium | |
| CN109048910B (en) | Robot avoidance prediction method and device | |
| CN104110855B (en) | Water heater and anode bar consumption amount calculating device and method of water heater | |
| CN115311640A (en) | Lane line abnormality detection method, device, electronic device and readable storage medium | |
| JP2020535450A (en) | Ultrasonic sensor module to improve the accuracy of distance measurement | |
| CN110967029B (en) | Picture construction method and device and intelligent robot | |
| CN118941522A (en) | A method and system for detecting verticality of high bridge piers | |
| WO2018232905A1 (en) | Method and system for managing roadside parking spaces | |
| CN109974724B (en) | Path planning method for intelligent driving system | |
| CN204376433U (en) | A kind of invisible electrical automobile intelligent charging device | |
| CN206073944U (en) | The equipment that drag losses calculates underground pipe depth is imported and exported by underground pipe | |
| CN101533567A (en) | Method for identifying intersection between air traffic control area and airway section and device thereof | |
| CN104713992B (en) | A kind of large-scale storage tank bottom plate traversal and positioner and method | |
| CN204063580U (en) | Water heater and water heater anode bar consumption calculation element |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |