CN111522351B - Three-dimensional formation and obstacle avoidance method of underwater robot - Google Patents
Three-dimensional formation and obstacle avoidance method of underwater robotDownload PDFInfo
- Publication number
- CN111522351B CN111522351BCN202010412640.9ACN202010412640ACN111522351BCN 111522351 BCN111522351 BCN 111522351BCN 202010412640 ACN202010412640 ACN 202010412640ACN 111522351 BCN111522351 BCN 111522351B
- Authority
- CN
- China
- Prior art keywords
- underwater robot
- formation
- obstacle
- robot
- underwater
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000015572biosynthetic processEffects0.000titleclaimsabstractdescription117
- 238000000034methodMethods0.000titleclaimsabstractdescription49
- 239000013598vectorSubstances0.000claimsabstractdescription60
- 238000012937correctionMethods0.000claimsabstractdescription13
- 238000013178mathematical modelMethods0.000claimsdescription12
- 239000011159matrix materialSubstances0.000claimsdescription6
- 230000007613environmental effectEffects0.000claimsdescription4
- 238000005457optimizationMethods0.000claimsdescription4
- 206010048669Terminal stateDiseases0.000claimsdescription3
- 239000002245particleSubstances0.000claimsdescription3
- 238000010586diagramMethods0.000description3
- 238000012986modificationMethods0.000description3
- 230000004048modificationEffects0.000description3
- 238000004364calculation methodMethods0.000description2
- 238000009795derivationMethods0.000description2
- 238000005516engineering processMethods0.000description2
- 230000000717retained effectEffects0.000description2
- 241000282461Canis lupusSpecies0.000description1
- 238000009825accumulationMethods0.000description1
- 238000004458analytical methodMethods0.000description1
- 230000007547defectEffects0.000description1
- 230000007812deficiencyEffects0.000description1
- 238000013461designMethods0.000description1
- 238000001514detection methodMethods0.000description1
- 230000000694effectsEffects0.000description1
- 239000003607modifierSubstances0.000description1
- 238000012544monitoring processMethods0.000description1
- 230000008092positive effectEffects0.000description1
- 238000011160researchMethods0.000description1
- 238000005096rolling processMethods0.000description1
- 230000003068static effectEffects0.000description1
Images





Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0692—Rate of change of altitude or depth specially adapted for under-water vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于水下机器人导航制导与控制技术领域,尤其涉及一种基于修正零空间模型预测控制的水下机器人三维编队及避障方法。The invention belongs to the technical field of navigation, guidance and control of underwater robots, and in particular relates to a three-dimensional formation and obstacle avoidance method of an underwater robot based on a modified zero-space model predictive control.
背景技术Background technique
近些年来,随着水下机器人逐渐在海洋环境监控、海底资源探测、搜索救援等领域展开应用,国内外学者针对如何提升水下机器人的自主航行作业能力与环境适应能力进行了大量研究。其中,编队控制技术是水下机器人协同执行具体作业任务的基础关键技术,它要求控制多艘机器人组成并保持一定的几何队形。国内外学者针对编队问题提出了一系列控制结构,主要包括长机-僚机法、基于行为的方法、以及虚拟结构法,它们适用于不同环境且各有优缺点:长机-僚机法原理简单,但存在编队误差累计、鲁棒性差等问题;基于行为的方法适应环境的能力强,但存在系统设计困难等缺陷;虚拟结构法的编队精度高,但灵活性差。In recent years, with the gradual application of underwater robots in the fields of marine environment monitoring, seabed resource detection, search and rescue, etc., domestic and foreign scholars have conducted a lot of research on how to improve the autonomous navigation and environmental adaptability of underwater robots. Among them, formation control technology is the basic key technology for underwater robots to cooperate to perform specific tasks. It requires controlling multiple robots to form and maintain a certain geometric formation. Scholars at home and abroad have proposed a series of control structures for the formation problem, mainly including the lead-wingman method, the behavior-based method, and the virtual structure method, which are suitable for different environments and have their own advantages and disadvantages: the lead-wingman method is simple in principle, However, there are problems such as accumulation of formation errors and poor robustness; the behavior-based method has a strong ability to adapt to the environment, but has defects such as difficulty in system design; the virtual structure method has high formation accuracy but poor flexibility.
水下机器人在三维复杂环境下编队航行时,往往会遇到各类突发障碍物或威胁,此时还要求机器人能够安全躲避障碍物,并避免机器人间发生碰撞。上述约束大大增加了编队问题的复杂度,而模型预测控制方法可灵活处理各种约束,鲁棒性高,因此将模型预测控制与上述虚拟结构法相结合是行之有效的手段。由于模型预测控制器能够稳定跟踪参考状态向量,因此如何根据编队与避障要求来定义合理的参考状态向量,是问题关键所在。而现有方法往往仅适用于规避简单障碍,无法应用于三维复杂环境下的编队与避障任务。When underwater robots navigate in formation in a complex three-dimensional environment, they often encounter various sudden obstacles or threats. At this time, the robots are also required to be able to safely avoid obstacles and avoid collisions between robots. The above constraints greatly increase the complexity of the formation problem, and the model predictive control method can flexibly deal with various constraints and has high robustness. Therefore, the combination of the model predictive control and the above virtual structure method is an effective method. Since the model predictive controller can stably track the reference state vector, how to define a reasonable reference state vector according to the formation and obstacle avoidance requirements is the key to the problem. However, existing methods are often only suitable for avoiding simple obstacles, and cannot be applied to formation and obstacle avoidance tasks in complex three-dimensional environments.
因此,有必要提供一种基于修正零空间模型预测控制的水下机器人三维编队及避障方法,以同时保证机器人稳定编队航行与安全避障,适应于复杂环境。Therefore, it is necessary to provide a three-dimensional formation and obstacle avoidance method for underwater robots based on modified zero-space model predictive control, so as to ensure stable formation navigation and safe obstacle avoidance of robots, and adapt to complex environments.
发明内容SUMMARY OF THE INVENTION
本发明在传统水下机器人编队控制方法不足的基础上提供了一种水下机器人三维编队及避障方法,基于修正零空间模型预测控制,以同时保证机器人稳定编队航行与安全避障,适应于复杂环境。The invention provides a three-dimensional formation and obstacle avoidance method for an underwater robot on the basis of the deficiency of the traditional underwater robot formation control method. complex environment.
为了实现上述目的,本发明提供了一种水下机器人三维编队及避障方法,包括以下步骤:In order to achieve the above purpose, the present invention provides a three-dimensional formation and obstacle avoidance method for an underwater robot, comprising the following steps:
(S1)构建水下机器人的三维编队系统数学模型:采用虚拟结构法定义几何队形,并根据队形中心参考轨迹,构建水下机器人的三维编队系统数学模型;(S1) Constructing the mathematical model of the three-dimensional formation system of the underwater robot: using the virtual structure method to define the geometric formation, and constructing the mathematical model of the three-dimensional formation system of the underwater robot according to the reference trajectory of the formation center;
(S2)无障碍自由环境下,基于Lyapunov稳定性原理计算各水下机器人的参考状态向量;(S2) In an unobstructed free environment, the reference state vector of each underwater robot is calculated based on the Lyapunov stability principle;
(S3)计算单个障碍对水下机器人运动的影响,以修正各水下机器人的参考运动速度;(S3) calculating the influence of a single obstacle on the motion of the underwater robot to correct the reference motion speed of each underwater robot;
(S4)根据零空间策略,考虑所有障碍物对水下机器人运动的影响,获得多障碍环境下的各水下机器人参考状态向量;(S4) According to the zero-space strategy, considering the influence of all obstacles on the motion of the underwater robot, obtain the reference state vector of each underwater robot in a multi-obstacle environment;
(S5)各水下机器人根据各自的参考状态向量,利用非线性模型预测控制器进行编队控制问题求解,获得最优控制输入。(S5) Each underwater robot uses the nonlinear model predictive controller to solve the formation control problem according to its own reference state vector, and obtains the optimal control input.
优选的,步骤(S1)采用虚拟结构法定义几何队形,并根据队形中心参考轨迹,构建水下机器人的三维编队系统数学模型的方法为:Preferably, the step (S1) adopts the virtual structure method to define the geometric formation, and according to the reference trajectory of the formation center, the method for constructing the mathematical model of the three-dimensional formation system of the underwater robot is:
不考虑洋流场影响,将第i个水下机器人Ri在惯性坐标系O-xyz下的质点运动模型定义为:Without considering the influence of the ocean current field, the particle motion model of thei -th underwater robot Ri in the inertial coordinate system O-xyz is defined as:

其中,si=[xi,yi,zi,vi,ψi,γi]T和ui=[uxi,uyi,uzi]T分别表示惯性坐标系O-xyz下第i个水下机器人的状态和控制输入向量,(xi,yi,zi)为机器人位置坐标,vi、ψi、γi分别为机器人速率、艏向角、纵倾角,uxi、uyi、uzi分别表示水下机器人在前进、艏向、纵倾三个方向上的过载分量;且满足ux,min≤uxi≤ux,max、uy,min≤uyi≤uy,max、uz,min≤uzi≤uz,max、zmin≤zi≤zmax、vmin≤vi≤vmax、γmin≤γi≤γmax;Among them, si =[xi ,yi ,zi ,vi ,ψi ,γi ]T andui =[uxi ,uyi ,uzi ]T respectively represent the first inertial coordinate system O-xyz The state and control input vectors of i underwater robots, (xi , yi , zi ) are the robot position coordinates, vi , ψi , γi are the robot velocity, heading angle, and pitch angle, respectively, uxi , uyi and uzi represent the overload components of the underwater robot in the forward, heading and trim directions respectively; and ux,min ≤uxi ≤ux,max , uy,min ≤uyi ≤uy,max , uz,min ≤uzi ≤uz,max , zmin ≤zi ≤zmax , vmin ≤vi ≤vmax , γmin ≤γi≤γmax ;
将所有水下机器人组队看作一个虚拟刚体,采用虚拟结构法定义几何队形,且其几何中心点为Or,机器人编队的期望运动轨迹即为队形中心Or的参考运动轨迹,则参考运动轨迹定义为:Considering all the underwater robot teams as a virtual rigid body, the virtual structure method is used to define the geometric formation, and its geometric center point is Or, and the desired movementtrajectory of the robot formation is the reference movementtrajectory of the formation center Or, then The reference motion trajectory is defined as:

其中,惯性坐标系O-xyz下第i个水下机器人Ri和中心点Or的位置坐标分别为Pi=[xi,yi,zi]T和Pr=[xr,yr,zr]T,虚拟中心点Or的期望速率、方位角、纵倾角分别为vr、ψr、γr,ωr为转弯角速率;Among them, the position coordinates of thei -th underwater robot Ri and the center point Or in the inertial coordinate system O-xyz are Pi =[xi ,yi ,zi ]T and Pr =[xr ,yr , zr ]T , the desired velocity, azimuth angle, and pitch angle of the virtual center pointOr are vr , ψr , γr , respectively, and ωr is the turning angle rate;
以虚拟中心点Or的速度矢量在水平面内的投影为xr轴,以垂直向上方向为zr轴方向,建立三维编队坐标系Or-xryrzr,则将编队坐标系Or-xryrzr下第i个水下机器人Ri的位置Pir=[xir,yir,zir]T表示为:Taking the projection of the velocity vector of the virtual center point Or in the horizontal plane as the xr axis, and taking the vertical upward direction as the zr axis direction, a three-dimensional formation coordinate systemOr -xry r z risestablished , then the formation coordinate system O The position Pir =[xir ,yir ,zir ]T of thei -th underwater robot Ri underr -xr yr zr is expressed as:

将式(3)求导,得到:Taking the derivative of formula (3), we get:

根据期望的几何队形,确定水下机器人Ri在编队坐标系Or-xryrzr下的期望位置Pdir=[xdir,ydir,zdir]T,则编队误差表示为:According to the expected geometric formation, determine the expected position Pdir =[xdir ,ydir ,zdir ]T of the underwater robotRi in the formation coordinate systemOr -x r y r z r,thenthe formation error is expressed as :
Pie=[xie,yie,zie]T=Pir-Pdir=[xir-xdir,yir-ydir,zir-zdir]T (5)Pie =[xie ,yie ,zie ]T =Pir -Pdir =[xir -xdir ,yir -ydir ,zir -zdir ]T (5)
根据式(1)-(5),构建水下机器人Ri的三维编队系统数学模型为:According to equations (1)-(5), the mathematical model of the three-dimensional formation system of the underwater robotRi is constructed as:

其中,第i个水下机器人Ri在编队坐标系Or-xryrzr下的状态向量为si=[xie,yie,zie,vi,ψi,γi]T。Among them, the state vector of thei -th underwater robot Ri in the formation coordinate systemOr -xr yr zr is si =[xie ,yie ,zie ,vi ,ψi ,γi ]T.
优选的,步骤(S2)无障碍自由环境下,基于Lyapunov稳定性原理计算各水下机器人的参考状态向量的方法为:Preferably, in step (S2), in an unobstructed free environment, the method for calculating the reference state vector of each underwater robot based on the Lyapunov stability principle is:
定义Lyapunov距离函数:Define the Lyapunov distance function:

对式(7)求导,得到:Taking the derivative of formula (7), we get:

其中,
优选的,步骤(S3)计算单个障碍对水下机器人运动的影响,以修正各水下机器人的参考运动速度的方法为:Preferably, the step (S3) calculates the influence of a single obstacle on the motion of the underwater robot, and the method for correcting the reference motion speed of each underwater robot is:
根据公式:According to the formula:

计算第k个障碍物对水下机器人Ri运动的影响Mk;Calculate the influence Mk of thekth obstacle on the motion of the underwater robotRi ;
其中,

根据水下机器人与障碍物间的距离,计算各障碍物的权重值ωk,并将权重值ωk归一化处理,得到归一化权重值

根据自由环境下的水下机器人Ri的参考状态向量sir,计算水下机器人的参考运动速度Vir,并在第k个障碍物影响下修正水下机器人的参考运动速度,得到参考运动速度修正值

其中,第k个障碍物的运动速度为Uobs,k,
优选的,步骤(S4)根据零空间策略,考虑所有障碍物对水下机器人运动的影响,获得多障碍环境下的各水下机器人参考状态向量的方法为:Preferably, in step (S4), according to the zero-space strategy, considering the influence of all obstacles on the motion of the underwater robot, the method for obtaining the reference state vector of each underwater robot in a multi-obstacle environment is:
考虑所有障碍物对水下机器人Ri运动的影响,将所有的参考运动速度修正值
根据公式:According to the formula:

基于零空间策略,完全保留优先级最高的参考运动速度修正值



根据水下机器人Ri的参考速度向量


优选的,根据各水下机器人的编队位置误差
根据优先级协调策略,对于优先级最高的水下机器人无需考虑其他水下机器人影响;对于优先级较低的水下机器人,将优先级较高的水下机器人作为其可能会遭遇的虚拟障碍,即半径为dmin、运动速度为
优选的,步骤(S5)各水下机器人根据各自的参考状态向量,利用非线性模型预测控制器进行编队控制问题求解,获得最优控制输入的方法为:Preferably, in step (S5), each underwater robot uses a nonlinear model predictive controller to solve the formation control problem according to their respective reference state vectors, and the method for obtaining the optimal control input is:
各水下机器人根据当前时刻t时的自身及其他水下机器人的状态向量、期望队形、参考轨迹、环境信息构建目标函数:Each underwater robot constructs an objective function according to the state vector, expected formation, reference trajectory, and environmental information of itself and other underwater robots at the current time t:

其中,当前时刻为t,时域长度为N,第i个水下机器人Ri的最优控制输入序列、预测状态向量序列、参考状态向量序列分别为ui(t:t+N-1)={ui(t),…,ui(t+N-1)}、si(t+1:t+N)={si(t+1),…,si(t+N)}、sir(t+1:t+N)={sir(t+1),…,sir(t+N)};A、B、C分别表示状态代价、终端状态代价、控制输入代价的加权矩阵;Among them, the current time is t, the length of the time domain is N, and the optimal control input sequence, predicted state vector sequence, and reference state vector sequence of thei -th underwater robot Ri are respectively ui (t:t+N-1) ={ui (t),…,ui (t+N-1)}, si (t+1:t+N)={si (t+1),…,si (t+N )}, sir (t+1:t+N)={sir (t+1),...,sir (t+N)}; A, B, C represent state cost, terminal state cost, control weighted matrix of input costs;
优化计算最优控制输入序列:The optimization computes the optimal control input sequence:

求解最优控制输入序列
根据当前时刻t时的最优控制输入序列
与现有技术相比,本发明的优点和积极效果在于:Compared with the prior art, the advantages and positive effects of the present invention are:
本发明提供了一种水下机器人三维编队及避障方法,基于修正零空间模型预测,结合虚拟结构法,通过构建水下机器人三维编队系统数学模型,采取Lyapunov稳定性理论计算各机器人的参考状态向量,实现三维编队与轨迹跟踪;同时,采取量化计算单个障碍对水下机器人运动的影响,通过修正机器人的参考运动速度,可在不影响编队系统稳定性的同时实现安全避障;采用零空间策略来综合考虑所有障碍物对机器人运动的影响,以满足避障要求,相比于传统的加权求和方式,该策略更加合理、高效,且仍然能同时保证机器人稳定编队航行与安全避障,适应于复杂环境。The invention provides a three-dimensional formation and obstacle avoidance method of an underwater robot. Based on the prediction of the corrected zero-space model, combined with the virtual structure method, the mathematical model of the three-dimensional formation system of the underwater robot is constructed, and the Lyapunov stability theory is used to calculate the reference state of each robot. vector to realize three-dimensional formation and trajectory tracking; at the same time, quantitative calculation of the influence of a single obstacle on the movement of the underwater robot is adopted, and by correcting the reference movement speed of the robot, it can achieve safe obstacle avoidance without affecting the stability of the formation system; using zero space Compared with the traditional weighted sum method, this strategy is more reasonable and efficient, and can still ensure the stable formation navigation of the robot and safe obstacle avoidance at the same time. Adapt to complex environments.
附图说明Description of drawings
图1为本发明的水下机器人三维编队及避障方法流程图;Fig. 1 is the flow chart of the three-dimensional formation and obstacle avoidance method of underwater robot of the present invention;
图2为基于虚拟结构法的水下机器人三维编队示意图;Figure 2 is a schematic diagram of a three-dimensional formation of an underwater robot based on a virtual structure method;
图3为二维空间下的零空间策略示意图;Figure 3 is a schematic diagram of a null space strategy in two-dimensional space;
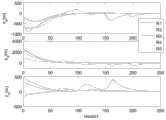
图4为多机器人三维编队与避障结果;Figure 4 shows the results of multi-robot 3D formation and obstacle avoidance;
其中:图4a显示水下机器人三维编队三维视图,图4b显示水下机器人三维编队俯视图,图4c显示编队误差曲线。Among them: Figure 4a shows the 3D view of the 3D formation of the underwater robot, Figure 4b shows the top view of the 3D formation of the underwater robot, and Figure 4c shows the formation error curve.
具体实施方式Detailed ways
以下,结合附图对本发明的具体实施方式进行进一步的描述。Hereinafter, the specific embodiments of the present invention will be further described with reference to the accompanying drawings.
由于水下机器人在三维复杂环境下编队航行时,往往会遇到各类突发障碍物或威胁,此时还要求水下机器人能够安全躲避障碍物,并避免机器人间发生碰撞。上述约束大大增加了编队问题的复杂度,而模型预测控制方法可灵活处理各种约束,鲁棒性高,因此本发明考虑将模型预测控制与虚拟结构法相结合。由于模型预测控制器能够稳定跟踪参考状态向量,因此如何根据编队与避障要求来定义合理的参考状态向量,是问题关键所在。针对编队要求,本发明考虑基于稳定性原理、空间位置或速度差值等计算出参考状态向量;在此基础上为满足避障要求,采用零空间策略来综合考虑所有障碍物对机器人运动的影响。When underwater robots navigate in formation in a complex three-dimensional environment, they often encounter various sudden obstacles or threats. At this time, underwater robots are also required to be able to safely avoid obstacles and avoid collisions between robots. The above constraints greatly increase the complexity of the formation problem, and the model predictive control method can flexibly handle various constraints and has high robustness. Therefore, the present invention considers the combination of the model predictive control and the virtual structure method. Since the model predictive controller can stably track the reference state vector, how to define a reasonable reference state vector according to the formation and obstacle avoidance requirements is the key to the problem. In view of the formation requirements, the present invention considers the calculation of the reference state vector based on the stability principle, spatial position or speed difference, etc. On this basis, in order to meet the obstacle avoidance requirements, a zero-space strategy is adopted to comprehensively consider the impact of all obstacles on the robot motion .
基于上述分析,本发明提供了一种基于修正零空间模型预测控制的水下机器人三维编队及避障方法。通过构建基于虚拟结构的水下机器人三维编队模型,进而采用Lyapunov稳定性原理与修正零空间策略来确定模型预测控制器的参考状态向量,可引导水下机器人组成三维队形并精确跟踪期望轨迹,同时安全躲避障碍。方法流程如图1所示,具体包括以下步骤:Based on the above analysis, the present invention provides a three-dimensional formation and obstacle avoidance method for an underwater robot based on a modified zero-space model predictive control. By constructing a 3D formation model of underwater robot based on virtual structure, and then using Lyapunov stability principle and corrected zero space strategy to determine the reference state vector of the model predictive controller, the underwater robot can be guided to form a 3D formation and accurately track the desired trajectory. Also avoid obstacles safely. The method flow is shown in Figure 1, which specifically includes the following steps:
(1)构建水下机器人的三维编队系统数学模型:采用虚拟结构法定义几何队形,并根据队形中心参考轨迹,构建水下机器人的三维编队系统数学模型。具体为:(1) Build the mathematical model of the 3D formation system of the underwater robot: The virtual structure method is used to define the geometric formation, and according to the reference trajectory of the formation center, the mathematical model of the 3D formation system of the underwater robot is constructed. Specifically:
①不考虑洋流场影响,第i个水下机器人Ri在惯性坐标系O-xyz下的质点运动模型可定义为:① Regardless of the influence of the ocean current field, the particle motion model of the i-th underwater robot Ri in the inertial coordinate system O-xyz can be defined as:

其中si=[xi,yi,zi,vi,ψi,γi]T和ui=[uxi,uyi,uzi]T分别表示水下机器人状态和控制输入。(xi,yi,zi)为机器人位置,vi、ψi、γi分别为机器人速率、艏向角、纵倾角uxi、uyi、uzi分别表示水下机器人在前进、艏向、纵倾三个方向上的过载分量;另外,水下机器人状态量和控制量需满足如下运动约束条件ux,min≤uxi≤ux,max,uy,min≤uyi≤uy,max,uz,min≤uzi≤uz,max,zmin≤zi≤zmax,vmin≤vi≤vmax,γmin≤γi≤γmax。where si =[xi ,yi ,zi ,vi ,ψ i ,γ i ]T and ui =[u xi,uyi,uzi]T represent the state and control input of the underwater robot, respectively. (xi ,yi ,zi ) is the position of the robot, vi , ψi , and γi are the speed, heading angle, and pitch angle of the robot, respectively. The overload components in the three directions of pitch and pitch; in addition, the state and control quantities of the underwater robot must satisfy the following motion constraints ux,min ≤uxi ≤ux,max , uy,min ≤uyi ≤uy,max , uz,min ≤uzi ≤uz,max , zmin ≤zi≤zmax , vmin ≤vi ≤vmax , γmin ≤γi≤γmax .
②如图2所示,采用虚拟结构法来定义几何队形,即将所有水下机器人组队看作一个虚拟刚体,且其几何中心点为Or,因此机器人编队的期望运动轨迹即为队形中心Or的参考运动轨迹。惯性坐标系O-xyz下第i个水下机器人Ri和中心点Or的位置坐标分别为Pi=[xi,yi,zi]T和Pr=[xr,yr,zr]T,虚拟中心点Or的期望速率、方位角、纵倾角分别为vr、ψr、γr,则参考运动轨迹可定义为:②As shown in Figure 2, the virtual structure method is used to define the geometric formation, that is, all the underwater robots are regarded as a virtual rigid body, and its geometric center point isOr , so the expected movement trajectory of the robot formation is the formation The reference motiontrajectory of the center Or. The position coordinates of thei -th underwater robot Ri and the center point Or under the inertial coordinate system O-xyz are Pi =[xi ,yi ,zi ]T and Pr =[xr ,y r, zr ]T , the desired velocity, azimuth, and pitch of the virtual center pointOr are vr , ψr , and γr respectively, then the reference motion trajectory can be defined as:

其中,ωr为转弯角速率。where ωr is the turning angular rate.
③为了更清晰描述模型,以虚拟中心点Or的速度矢量在水平面内的投影为xr轴,以垂直向上方向为zr轴方向,建立三维编队坐标系Or-xryrzr,得到编队坐标系Or-xryrzr下机器人Ri的位置Pir=[xir,yir,zir]T为:③ In order to describe the model more clearly, the three-dimensional formation coordinate systemOr -xr yr zr is established with the projection of the velocityvector of the virtual center point Or in the horizontal plane as the xr axis, and the vertical upward direction as the zr axis direction., the position Pir = [xir , yir , zir ]T of the robot Ri under the formation coordinate system Or -x r y r z risobtainedas :

对上式(3)求导,得到:Taking the derivation of the above formula (3), we get:

根据期望的几何队形,确定机器人Ri在三维编队坐标系Or-xryrzr下的期望位置Pdir=[xdir,ydir,zdir]T;According to the expected geometric formation, determine the expected position Pdir =[xdir ,ydir ,zdir ]T of the robotRi in the three-dimensional formation coordinate system Or-xr yr zr;
则求得编对误差Pie=[xie,yie,zie]T=Pir-Pdir=[xir-xdir,yir-ydir,zir-zdir]T;Then find the alignment error Pie =[xie ,yie ,zie ]T =Pir -Pdir =[xir -xdir ,yir -ydir ,zir -zdir ]T ;
由编队误差Pie,将式(4)可重新定义为:From the formation error Pie , formula (4) can be redefined as:

则构建第i个水下机器人Ri的三维编队系统数学模型为:Then the mathematical model of the three-dimensional formation system of the i-th underwater robot Ri is constructed as:

其中,第i个水下机器人Ri在编队坐标系Or-xryrzr下的状态向量为si=[xie,yie,zie,vi,ψi,γi]T。Among them, the state vector of thei -th underwater robot Ri in the formation coordinate systemOr -xr yr zr is si =[xie ,yie ,zie ,vi ,ψi ,γi ]T.
(2)无障碍自由环境下,基于Lyapunov稳定性原理计算各水下机器人的参考状态向量。具体为:(2) In an unobstructed free environment, the reference state vector of each underwater robot is calculated based on the Lyapunov stability principle. Specifically:
为使机器人组成编队队形并沿期望轨迹航行,要求各机器人编队误差逐渐趋于0即xie→0,yie→0,zie→0,因此可定义Lyapunov距离函数为:In order to make the robots form a formation and sail along the desired trajectory, the formation error of each robot is required to gradually tend to 0, that is, xie → 0, yie → 0, zie → 0, so the Lyapunov distance function can be defined as:

对式(7)求导后可得After derivation of formula (7), we can get

为实现

其中,β1、β2、β3为大于0的常系数;vi、ψi、γi分别作为第i个水下机器人Ri的期望速率vir、艏向角ψir、纵倾角γir,由于水下机器人的期望编队误差均为0,得到自由环境下第i个水下机器人Ri在编队坐标系Or-xryrzr下的参考状态向量为sir=[0,0,0,vir,ψir,γir]T。Among them, β1 , β2 , β3 are constant coefficients greater than 0; vi , ψi , γi are the expected velocityvir , heading angle ψ ir, pitch angle γ of thei -th underwater robot Ri, respectivelyir , since the expected formation error of the underwater robot is all 0, the reference state vector of thei -th underwater robot Ri in the formation coordinate systemOr -xr yr zr in the free environment is obtained as sir = [0 ,0,0,vir ,ψir ,γir ]T .
(3)计算单个障碍对水下机器人运动的影响,以修正各水下机器人的参考运动速度。具体为:(3) Calculate the influence of a single obstacle on the motion of the underwater robot to correct the reference motion speed of each underwater robot. Specifically:
①假设机器人航行空间内有K个障碍物,以第k个障碍物为例,k∈{1,...,K},其表面方程为
第k个障碍物对水下机器人Ri运动的影响为:The influence of the kth obstacle on the motion of the underwater robotRi is:

其中,dk、ek、fk与ak、bk、ck分别为第k个障碍物的形状系数和尺寸系数,k∈{1,...,K},K表示水下机器人航行空间内障碍物数量;I为三阶单位矩阵,
②根据机器人与障碍物间的距离,计算各障碍物的权重值ωk:② According to the distance between the robot and the obstacle, calculate the weight value ωk of each obstacle:

由于

③根据自由环境下的机器人参考状态向量sir,可计算水下机器人Ri的参考运动速度Vir=[vircosγircosψir,vircosγirsinψir,virsinγir]T,并在第k个障碍物影响下修正参考运动速度,得到参考运动速度修正值

其中,第k个障碍物的运动速度为Uobs,k,指数衰减项
(4)根据零空间策略,考虑所有障碍物对水下机器人运动的影响,获得多障碍环境下的各水下机器人参考状态向量。具体为:(4) According to the zero-space strategy, considering the influence of all obstacles on the motion of the underwater robot, the reference state vector of each underwater robot in the multi-obstacle environment is obtained. Specifically:
由于各障碍物的形状、尺寸、距离等互不相同,它们对水下机器人运动会产生不同的影响,因此修正后的参考运动速度
①将所有的参考运动速度修正值
②根据零空间策略融合各参考运动速度修正值:②Fusing the correction value of each reference motion speed according to the zero space strategy:

按照上式,将完全保留优先级最高的参考运动速度修正值,而对于优先级次高的参考运动速度修正值仅保留其在零空间内的分量,以此类推,即可融合所有参考运动速度修正值。图3表示二维空间下的零空间策略示意图,其中





③根据修正后的参考速度向量


各水下机器人均按上述步骤计算各自的参考状态向量,但还需将其他水下机器人作为虚拟障碍物,以避免机器人间发生碰撞。具体来说,首先根据各机器人的编队位置误差

(5)各水下机器人根据各自的参考状态向量,利用非线性模型预测控制器进行编队控制问题求解,获得最优控制输入。具体为:(5) Each underwater robot uses the nonlinear model predictive controller to solve the formation control problem according to its own reference state vector, and obtains the optimal control input. Specifically:
①各水下机器人利用非线性模型预测控制器跟踪参考状态,以获得最优控制输入。假设当前时刻为t,时域长度为N,机器人Ri的最优控制输入序列、预测状态向量序列、参考状态向量序列分别为ui(t:t+N-1)={ui(t),…,ui(t+N-1)}、si(t+1:t+N)={si(t+1),…,si(t+N)}、sir(t+1:t+N)={sir(t+1),…,sir(t+N)}。① Each underwater robot uses a nonlinear model predictive controller to track the reference state to obtain the optimal control input. Assuming that the current moment is t and the time domain length is N, the optimal control input sequence, predicted state vector sequence, and reference state vector sequence of the robot Ri are respectively ui (t:t+N-1)={ui (t ),…,ui (t+N-1)}, si (t+1:t+N)={si (t+1),…,si (t+N)}, sir ( t+1:t+N)={sir (t+1),...,sir (t+N)}.
则水下机器人Ri根据自身及其他机器人的状态向量、期望队形、参考轨迹、环境信息等构建目标函数:Then the underwater robot Ri constructs the objective function according to the state vector, expected formation, reference trajectory, and environmental information of itself and other robots:

其中,A、B、C分别表示状态代价、终端状态代价、控制输入代价的加权矩阵,它们需提前设定。Among them, A, B, and C represent the weighted matrix of state cost, terminal state cost, and control input cost, respectively, which need to be set in advance.
②然后,采取灰狼优化方法优化计算最优控制输入序列

其中
③将当前时刻t时的最优控制输入序列
图4表示某复杂环境下的水下机器人三维编队与避障结果,图4a显示水下机器人三维编队三维视图,图4b显示水下机器人三维编队俯视图,图4c显示编队误差曲线。5艘水下机器人R1-R5可快速编队组成三角队形并跟踪期望轨迹FGT,且安全躲避各类静态或动态障碍物以及其他机器人。虽然各机器人会因避障而改变期望队形,导致编队误差增大,但机器人在避开障碍后会迅速回到期望位置,编队误差重新趋于0。Figure 4 shows the results of the 3D formation and obstacle avoidance of underwater robots in a complex environment. Figure 4a shows the 3D view of the 3D formation of the underwater robot, Figure 4b shows the top view of the 3D formation of the underwater robot, and Figure 4c shows the formation error curve. The five underwater robots R1-R5 can quickly form a triangular formation and track the desired trajectory FGT, and safely avoid various static or dynamic obstacles and other robots. Although each robot will change the expected formation due to obstacle avoidance, resulting in an increase in the formation error, but the robot will quickly return to the desired position after avoiding the obstacle, and the formation error tends to zero again.
因此,综上可知,本发明提供的一种水下机器人三维编队及避障方法,基于修正零空间模型预测,基于虚拟模型结构,通过构建水下机器人三维编队系统数学模型,采取Lyapunov稳定性理论计算各机器人的参考状态向量,实现了三维编队与轨迹跟踪;同时,采取量化计算单个障碍对水下机器人运动的影响,通过修正机器人的参考运动速度,可在不影响编队系统稳定性的同时实现安全避障;采用零空间策略来综合考虑所有障碍物对机器人运动的影响,以满足避障要求,相比于传统的加权求和方式,该策略更加合理、高效,且仍然能同时保证机器人稳定编队航行与安全避障,适应于复杂环境。Therefore, it can be seen from the above that the three-dimensional formation and obstacle avoidance method of an underwater robot provided by the present invention is based on the prediction of the modified zero-space model and the virtual model structure. The reference state vector of each robot is calculated to realize three-dimensional formation and trajectory tracking; at the same time, the impact of a single obstacle on the movement of the underwater robot is quantitatively calculated, and the reference movement speed of the robot can be corrected without affecting the stability of the formation system. Safe obstacle avoidance; a zero-space strategy is used to comprehensively consider the impact of all obstacles on the robot's motion to meet the obstacle avoidance requirements. Compared with the traditional weighted summation method, this strategy is more reasonable and efficient, and can still ensure the stability of the robot at the same time. Formation navigation and safe obstacle avoidance, adapting to complex environments.
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。The above are only preferred embodiments of the present invention, and are not intended to limit the present invention in other forms. Any person skilled in the art may use the technical content disclosed above to make changes or modifications to equivalent changes. The embodiments are applied to other fields, but any simple modifications, equivalent changes and modifications made to the above embodiments according to the technical essence of the present invention still belong to the protection scope of the technical solutions of the present invention without departing from the content of the technical solutions of the present invention.
Claims (3)
Translated fromChinese






























Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010412640.9ACN111522351B (en) | 2020-05-15 | 2020-05-15 | Three-dimensional formation and obstacle avoidance method of underwater robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010412640.9ACN111522351B (en) | 2020-05-15 | 2020-05-15 | Three-dimensional formation and obstacle avoidance method of underwater robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111522351A CN111522351A (en) | 2020-08-11 |
| CN111522351Btrue CN111522351B (en) | 2021-05-18 |
Family
ID=71907374
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010412640.9AActiveCN111522351B (en) | 2020-05-15 | 2020-05-15 | Three-dimensional formation and obstacle avoidance method of underwater robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111522351B (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112558483B (en)* | 2020-12-29 | 2023-05-16 | 北京电子工程总体研究所 | Formation control method and system based on model predictive control |
| CN113009924A (en)* | 2021-03-08 | 2021-06-22 | 哈尔滨工程大学 | Obstacle avoidance method of underwater unmanned aerial vehicle based on non-quadratic inverse optimal control |
| CN113190037A (en)* | 2021-04-08 | 2021-07-30 | 上海吞山智能科技有限公司 | Unmanned aerial vehicle optimal path searching method based on improved fluid disturbance and sparrow algorithm |
| CN113448338B (en)* | 2021-05-25 | 2023-11-28 | 鹏城实验室 | Robot control method, robot, computer program product, and storage medium |
| CN114510031A (en)* | 2021-12-31 | 2022-05-17 | 中原动力智能机器人有限公司 | Robot vision navigation method, device, robot and storage medium |
| CN115629613B (en)* | 2022-12-19 | 2023-04-04 | 北京卓翼智能科技有限公司 | Formation fault-tolerant control method for multiple intelligent agents |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109062229A (en)* | 2018-08-03 | 2018-12-21 | 北京理工大学 | The navigator of underwater robot system based on binocular vision follows formation method |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102042835B (en)* | 2010-11-05 | 2012-10-24 | 中国海洋大学 | Autonomous underwater vehicle combined navigation system |
| WO2013038544A1 (en)* | 2011-09-15 | 2013-03-21 | 株式会社安川電機 | Robotic system and robot controller |
| CN102722177B (en)* | 2012-06-27 | 2014-06-25 | 哈尔滨工程大学 | Autonomous underwater vehicle (AUV) three-dimensional straight path tracking control method with PID (Piping and Instruments Diagram) feedback gain |
| CN103576693B (en)* | 2013-11-11 | 2016-06-29 | 哈尔滨工程大学 | Underwater robot three-dimensional path tracking and controlling method based on second order filter |
| CN104918263B (en)* | 2015-06-08 | 2018-08-21 | 浙江理工大学 | A kind of mobile auxiliary network device and its network-building method based on underwater sound sensor net |
| CN108829113B (en)* | 2018-09-01 | 2021-05-28 | 哈尔滨工程大学 | A multi-robot formation adaptive zero-space behavior fusion method |
| CN109375646A (en)* | 2018-11-14 | 2019-02-22 | 江苏科技大学 | Autonomous Navigation Method for AUV Docking and Recovery Based on FMSRUPF Algorithm |
| CN110231821B (en)* | 2019-06-03 | 2022-05-31 | 哈尔滨工程大学 | Improved self-adaptive zero-space behavior fusion method for multi-robot formation |
| CN110333369B (en)* | 2019-07-10 | 2021-05-11 | 哈尔滨工程大学 | DVL speed measurement system and adaptive denoising method of UUV based on surface GPS correction |
- 2020
- 2020-05-15CNCN202010412640.9Apatent/CN111522351B/enactiveActive
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109062229A (en)* | 2018-08-03 | 2018-12-21 | 北京理工大学 | The navigator of underwater robot system based on binocular vision follows formation method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111522351A (en) | 2020-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111522351B (en) | Three-dimensional formation and obstacle avoidance method of underwater robot | |
| CN113093804B (en) | Formation control method and control system of unmanned boat based on inversion sliding mode control | |
| Liang et al. | Leader-following formation tracking control of mobile robots without direct position measurements | |
| CN102999050B (en) | Automatic obstacle avoidance method for intelligent underwater robots | |
| CN112147899B (en) | An autonomous obstacle avoidance control method for underwater robots based on fuzzy sliding mode algorithm | |
| CN109784201B (en) | AUV dynamic obstacle avoidance method based on four-dimensional risk assessment | |
| Wang et al. | Virtual-goal-guided RRT for visual servoing of mobile robots with FOV constraint | |
| CN108614560B (en) | A mobile robot vision servo guaranteed performance tracking control method | |
| CN115903800B (en) | A strict safety control method for multi-unmanned vessel formation based on leader collaboration | |
| CN110561420B (en) | Method and device for trajectory planning of flexible robot with arm profile constraint | |
| CN105929849B (en) | One kind is based on point quelling wheeled mobile robot target following control method | |
| Ren et al. | Integrated task sensing and whole body control for mobile manipulation with series elastic actuators | |
| US20230302645A1 (en) | Method of robot dynamic motion planning and control | |
| CN114397899A (en) | Bionic robot fish three-dimensional path tracking control method and device | |
| CN115008475B (en) | Double-mechanical-arm cooperative obstacle avoidance motion planning optimization method based on mixed geometric representation | |
| CN114721275A (en) | Visual servo robot self-adaptive tracking control method based on preset performance | |
| CN108829134A (en) | A kind of real-time automatic obstacle avoiding method of deepwater robot | |
| CN115903806A (en) | Multi-Agent Formation Obstacle Avoidance Method Based on Adaptive Dynamic Window Method | |
| CN114063621A (en) | Wheeled robot formation tracking and obstacle avoidance control method | |
| CN116276966A (en) | Mobile operation robot whole body reaction planning control method based on quadratic programming | |
| CN112650217B (en) | Robot trajectory tracking strategy dynamic optimization method based on evaluation function | |
| Hu et al. | Optimal path planning for mobile manipulator based on manipulability and localizability | |
| Zhang et al. | Multi-UUV path planning based on improved artificial potential field method | |
| Cui et al. | Motion planning and control of a morphing quadrotor in restricted scenarios | |
| Tong et al. | Neural network based visual servo control under the condition of heavy loading |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |