CN111462491A - A Traffic Conflict Early Warning Method Based on Ramp Control in Expressway Convergence Area - Google Patents
A Traffic Conflict Early Warning Method Based on Ramp Control in Expressway Convergence AreaDownload PDFInfo
- Publication number
- CN111462491A CN111462491ACN202010271459.0ACN202010271459ACN111462491ACN 111462491 ACN111462491 ACN 111462491ACN 202010271459 ACN202010271459 ACN 202010271459ACN 111462491 ACN111462491 ACN 111462491A
- Authority
- CN
- China
- Prior art keywords
- ramp
- vehicle
- traffic
- warning
- vehicles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/097—Supervising of traffic control systems, e.g. by giving an alarm if two crossing streets have green light simultaneously
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及智能交通控制及预警领域,详细说是涉及一种基于匝道控制的高速公路合流区交通冲突预警方法。The invention relates to the field of intelligent traffic control and early warning, and in particular relates to a traffic conflict early warning method in a highway merging area based on ramp control.
背景技术Background technique
随着我国经济的发展,私家车保有量持续增长、高速公路不断铺建,越来越多的人选择驾驶私家车经高速公路去目的地以求高速便捷,但高速公路的容量毕竟有限,节假日期间高速公路拥挤不堪已成为一种趋势。高速公路车流量的增大,意味着经过高速公路合流区的车辆数目不断增多,同时也意味着高速公路合流区交通冲突发生的可能性也在增大,这对高速公路合流区的控制水平提出了更高的要求。With the development of my country's economy, the number of private cars continues to grow, and highways are constantly being built. More and more people choose to drive private cars to their destinations through highways for high-speed convenience. However, the capacity of highways is limited after all. Holidays Overcrowded highways have become a trend during the period. The increase in the traffic flow of the expressway means that the number of vehicles passing through the expressway merging area is increasing, and it also means that the possibility of traffic conflicts in the expressway merging area is also increasing. higher requirements.
现有的合流区控制主要有早合流控制策略、晚合流控制策略,早合流控制是在合流区前方数公里每隔一公里放置一个前方车道封闭的标志,提醒驾驶员提前进行变道;晚合流控制的思想是鼓励驾驶员利用开放车道和封闭车道到达合流区前端时才开始合流,这与早合流恰好相反。但是现有的不管是早合流控制策略还是晚合流控制策略对我国现有高速公路并不具有适用性,因为我国高速公路正常情况不允许随意封闭车道,即使允许封闭车道也有可能造成合流区的二次拥挤,增加了合流区潜在不安全性。The existing merging area control mainly includes the early merging control strategy and the late merging control strategy. The early merging control is to place a front lane closed sign every one kilometer several kilometers ahead of the merging area to remind the driver to change lanes in advance; The idea of control is to encourage drivers to use open lanes and closed lanes to start merging when they reach the front of the merging area, which is the opposite of early merging. However, the existing control strategies, whether early or late, are not applicable to the existing expressways in my country, because the normal conditions of expressways in my country do not allow random closure of lanes. Sub-crowded, increasing the potential unsafety of the merging area.
现有的针对高速公路合流区潜在的交通冲突进行判别时,多采用TTC进行安全时间的评判,TTC假设冲突者双方不采取任何保护措施,持续保持原有速度和行驶方向,两车发生碰撞的预期时间.该方法基于车辆当前时刻的速度和航向,并没有考虑到车辆的加速度,致使判断误差较大,而TTC模型中车辆发生冲突的瞬时速度较难获得,且TTC取值越小,并不意味着事故的发生。When judging potential traffic conflicts in expressway merging areas, TTC is often used to judge the safety time. TTC assumes that the conflicting parties do not take any protective measures and continue to maintain the original speed and driving direction. Expected time. This method is based on the speed and heading of the vehicle at the current moment, and does not take into account the acceleration of the vehicle, resulting in a large judgment error, and the instantaneous speed of the vehicle conflict in the TTC model is difficult to obtain, and the smaller the TTC value, the more does not imply an accident.
此外,现有的针对高速公路合流区潜在的交通冲突进行预警,没有考虑到高速公路合流区车辆换道较其他路段更为频繁的实际情况,若是不考虑车辆换道的实际情况直接进行预警,极大可能造成预警信息的滞后性甚至出现错误。In addition, the existing early warning for potential traffic conflicts in the expressway merging area does not take into account the fact that vehicles change lanes more frequently in the expressway merging area than other sections. It is very likely to cause lag of early warning information or even errors.
发明内容SUMMARY OF THE INVENTION
为了克服上述缺点,并结合高速公路合流区车流量变化具有动态性的实际情况,本发明决定首先基于匝道车流量实时监测结果进行匝道红绿灯信号控制,以便更好地缓解或者避开合流区交通拥挤的发生,然后基于PET进行合流区交通冲突的判别,最后基于车辆换道检测结果进行合流区冲突预警等级的最终确定。为实现上述目的,本发明采用以下技术方案:In order to overcome the above shortcomings, and in consideration of the actual situation that the traffic flow changes in the merging area of the expressway are dynamic, the present invention decides to firstly control the traffic lights on the ramp based on the real-time monitoring results of the traffic flow on the ramp, so as to better alleviate or avoid the traffic congestion in the merging area. Then, based on the PET, the traffic conflict in the merging area is judged, and finally the warning level of the conflict in the merging area is finally determined based on the vehicle lane change detection result. To achieve the above object, the present invention adopts the following technical solutions:
一种基于匝道控制的高速公路合流区交通冲突预警方法,流程图如图1所示,包括以下步骤:A method for early warning of traffic conflicts in expressway merging areas based on ramp control, the flowchart is shown in Figure 1, including the following steps:
步骤1,基于车流量实时监测比对结果进行匝道信号灯的控制,若控制结果为显示红灯,则转步骤2;若控制结果为显示绿灯,则转步骤3;Step 1, control the ramp signal light based on the real-time monitoring and comparison result of the traffic flow, if the control result is that the red light is displayed, go to step 2; if the control result is that the green light is displayed, go to step 3;
步骤2,进行匝道车辆是否有闯红灯情况出现的判别,若出现匝道车辆闯红灯,转步骤5,发布预警信息,否则不进行预警;Step 2, determine whether the on-ramp vehicle has run the red light, if the on-ramp vehicle runs the red light, go to step 5, and issue the warning information, otherwise, no warning will be issued;
步骤3,基于PET进行合流区交通冲突的判别并初步确定交通冲突严重程度等级;Step 3: Based on the PET, the traffic conflict in the merging area is judged and the severity level of the traffic conflict is preliminarily determined;
步骤4,针对存在交通冲突的主干道车辆,进行换道检测,确定最终的交通冲突严重程度等级;Step 4: Perform lane change detection for the main road vehicles with traffic conflicts to determine the final traffic conflict severity level;
步骤5,根据步骤4中得到的不同交通冲突严重程度在交通预警显示屏发布不同的预警信息;Step 5, issuing different warning information on the traffic warning display screen according to the different traffic conflict severity obtained in step 4;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤1中基于车流量实时监测比对结果对单车道匝道进行红绿灯信号控制,匝道信号灯控制流程图如图2所示,其特征在于需要获取的车流量包括两类:合流区主干道的实时当量交通量Qmain和合流区匝道的当量交通量Qramp;In step 1 of a method for early warning of traffic conflict in a highway merging area based on ramp control, the traffic light signal control is performed on a single-lane ramp based on the results of real-time monitoring and comparison of traffic flow. The flow chart of the ramp signal light control is shown in Figure 2. The obtained traffic flow includes two types: the real-time equivalent traffic volume Qmain of the main road in the merging area and the equivalent traffic volume Qramp of the ramp in the merging area;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤1中基于车流量实时监测比对结果进行匝道红绿灯信号控制,车流量的实时监测比对是对合流区主干道车流量和匝道车流量进行比对的,具体的说,是通过提前设定主干道当量交通量警戒值Qmain.warning和匝道当量交通量警戒值Qramp.warning,设置主干道和匝道的当量交通量的警戒值均为其道路设计通行能力的80%,计算方式如下:In step 1 of a method for early warning of traffic conflict in a highway merging area based on ramp control, the traffic light signal control on the ramp is performed based on the results of real-time monitoring and comparison of traffic flow. The traffic flow is compared, specifically, by setting the main road equivalent traffic volume warning value Qmain.warning and the ramp equivalent traffic volume warning value Qramp.warning in advance, and setting the equivalent traffic volume warning value of the main road and the ramp. Both are 80% of their road design capacity, and the calculation method is as follows:
Qmain.warning=0.8Qmain.set (1)Qmain.warning = 0.8Qmain.set (1)
Qramp.warning=0.8Qramp.set (2)Qramp.warning = 0.8Qramp.set (2)
然后将道路流量监测器实时监测到的合流区主干道的实时当量交通量Qmain.realtime和合流区匝道的实时当量交通量Qramp.realtime与主干道当量交通量警戒值和匝道当量交通量警戒值进行比对,当Qmain.realtime≥Qmain.warning时,不管匝道实时当量交通量是否大于匝道当量交通量的警戒值,匝道信号灯均显示红灯;Then, the real-time equivalent traffic volume Q main.realtime of the main road in the junction area and the real-time equivalent traffic volume Qramp.realtime of the ramp in the junction area monitored by the road flow monitor in real time arecombined with the main road equivalent traffic volume warning value and the ramp equivalent traffic volume warning When Qmain.realtime ≥Qmain.warning , no matter whether the real-time equivalent traffic volume of the ramp is greater than the warning value of the equivalent traffic volume of the ramp, the ramp signal lights will display red light;
当Qmain.realtime<Qmain.warning时,将匝道实时当量交通量与匝道当量交通量的警戒值进行比较,若是Qramp.realtime<Qramp.warning,匝道信号灯显示绿灯、允许匝道车辆进入合流区通行;若是Qramp.realtime≥Qramp.warning,匝道信号灯显示红灯;When Qmain.realtime < Qmain.warning , compare the real-time equivalent traffic volume of the ramp with the warning value of the equivalent traffic volume of the ramp. If Qramp.realtime < Qramp.warning , the ramp signal light will display green light, allowing the ramp vehicles to enter the merge zone traffic; if Qramp.realtime ≥Qramp.warning , the ramp signal light will display red;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤2中进行匝道车辆是否有闯红灯情况出现的判别,这里对闯红灯行为的定义是车辆在相位红灯时间内越过停车线进入冲突区域。匝道车辆是否有闯红灯行为出现的判别流程图如图3所示,具体子步骤如下:In step 2 of a method for early warning of traffic conflict in a highway merging area based on ramp control, it is judged whether the on-ramp vehicle has run a red light. The flow chart for judging whether the on-ramp vehicle has the behavior of running a red light is shown in Figure 3. The specific sub-steps are as follows:
(1)将监测器采集到的匝道上的第n个车辆踏上监测器的时刻及在监测器上的占用时间记录下来,分别记为tn-start和Δtn-occupy,转步骤(2);(1) Record the time when the nth vehicle on the ramp collected by the monitor steps on the monitor and the occupancy time on the monitor, which are recorded as tn-start and Δtn-occupy respectively , and go to step (2) );
(2)识别此车辆是否采取了减速制动:事先设定一个匝道车辆通过停车线的速度警戒值vn-warning,若此车辆通过匝道停车线的估算速度vn-pl小于设定的速度警戒值vn-warning,则视为车辆采取了减速制动、识别为停车行为;否则没有进行减速制动,转步骤(3);(2) Identify whether the vehicle has taken deceleration braking: set a speed warning value vn-warning for the vehicle on the ramp to pass the stop line in advance, if the estimated speed vn-pl of the vehicle passing the stop line on the ramp is less than the set speed If the warning value is vn-warning , it is considered that the vehicle has taken deceleration braking and is identified as a parking behavior; otherwise, no deceleration braking is performed, and go to step (3);
速度警戒值的计算方式如下:The speed warning value is calculated as follows:

式中,vn-warning是匝道车辆通过停车线的速度警戒值,Ds是匝道雷达检测器与匝道停车线之间的距离;where vn-warning is the speed warning value of the ramp vehicle passing the stop line, Ds is the distance between the ramp radar detector and the ramp stop line;
匝道车辆通过匝道停车线的速度估算方式如下:The speed of on-ramp vehicles passing through the stop line of the ramp is estimated as follows:

式中,vn-pl是匝道车辆通过停车线的估算速度,
(3)判断此车辆通过停车线的时刻是否位于红灯开启亮之后:匝道信号灯红灯启亮时刻为tred,而此匝道车辆通过匝道停车线的时刻为tn-pl,若此车辆通过匝道停车线的时刻tn-pl晚于红灯启亮时刻tred,则识别为此车辆具有闯红灯行为、发布“前方车辆闯红灯,请注意安全”的预警信息;否则此车辆没有闯红灯、不发布预警;(3) Judging whether the time when the vehicle passes the stop line is after the red light is turned on: the time when the red light of the ramp signal light is turned on is tred , and the time when the vehicle on the ramp passes the stop line is tn-pl . If the time tn-pl of the stop line of the ramp is later than the time tred of the red light, it is recognized that the vehicle has the behavior of running the red light, and the warning information of "the vehicle ahead runs the red light, please pay attention to safety" is issued; otherwise, the vehicle does not run the red light and will not be issued early warning;
匝道车辆通过匝道停车线时刻的估算方式如下:The estimated time of the on-ramp vehicle passing the ramp stop line is as follows:

式中,tn-pl是匝道车辆通过停车线的估算时间,Lcar.occupy是雷达检测器检测到的匝道车辆在雷达检测器上的占用长度;;Lsetting是雷达检测器的布设长度;In the formula, tn-pl is the estimated time for the ramp vehicle to pass the stop line, Lcar.occupy is the occupied length of the ramp vehicle detected by the radar detector on the radar detector; Lsetting is the layout length of the radar detector;
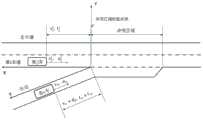
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤3中基于PET进行合流区交通冲突的判别,具体来说,是基于PET对合流区交通冲突严重程度进行判别,判别流程图如图4,在判别过程中所使用的参数标示如图5所示,具体分为以下子步骤:In step 3 of a method for early warning of traffic conflict in a merging area of a highway based on ramp control, the traffic conflict in the merging area is judged based on PET. Specifically, the severity of the traffic conflict in the merging area is judged based on PET. The flow chart of the judgment is shown in the figure. 4. The parameters used in the discrimination process are marked as shown in Figure 5, and are specifically divided into the following sub-steps:
(1)匝道信号控制灯显示为绿灯,匝道雷达监测器检验有无车辆到达,若有则转(2),否则不进行预警;这个步骤是不可以省略的,因为在前面步骤1中,即使只有匝道没有车流,只要主干道有车流且小于警戒值,匝道信号控制就会显示绿灯,而进行后续步骤有时需要以匝道有车辆经过为前提的;(1) The ramp signal control light is displayed as a green light, and the ramp radar monitor checks whether there is a vehicle arriving, and if so, turn to (2), otherwise no warning will be given; this step cannot be omitted, because in the previous step 1, even if Only the ramp has no traffic flow, as long as the main road has traffic flow and is less than the warning value, the ramp signal control will display a green light, and the subsequent steps sometimes require the premise that there are vehicles passing on the ramp;
(2)考虑到主干道上的车辆受合流区交通状态的影响,可近似认为主干道上的车辆均做匀减速运动,基于雷达检测器对主干道上的车辆进行分车道采集基本交通参数,包括主干道第i车道的第j个车辆距合流区冲突区域起点的距离




解得:Solutions have to:

对单车道匝道上的的第n个车辆进行分车道采集基本交通参数,包括匝道车辆距合流区冲突区域起点的距离xn、速度vn、加速度an、定义匝道车辆到达合流区冲突区域起点的时间tn;此外,为了安全起见,通常会附加一定的安全距离值为d0,以便让驾驶员有足够的反应时间。Collect basic traffic parameters for the n-th vehicle on a single-lane ramp by lane, including the distance xn , speed vn , acceleration an of the ramp vehicle from the starting point of the conflict area in the merging area, and defining the arrival of the vehicle on the ramp to the starting point of the conflict area in the merging area. time tn ; in addition, for the sake of safety, a certain safety distance value d0 is usually added to allow the driver to have enough reaction time.

解得:Solutions have to:

(3)计算主干道车辆与匝道车辆的后侵入时间PET:(3) Calculate the rear intrusion time PET of the main road vehicle and the ramp vehicle:

(4)基于冲突阈值初步判别交通冲突严重程度,同时记录下存在交通冲突的车辆对:由公式(6)~(10)可以估算出主干道车辆与匝道车辆的后侵入时间PET,选取得到的PET的15%、50%、85%分位值作为PET阈值,将交通冲突严重程度划分为4种等级:(4) Preliminarily determine the severity of traffic conflicts based on the conflict threshold, and record the vehicle pairs that have traffic conflicts at the same time: From formulas (6) to (10), the post-intrusion time PET of the main road vehicle and the ramp vehicle can be estimated, and the obtained The 15%, 50%, and 85% quantiles of PET are used as PET thresholds to divide the severity of traffic conflicts into 4 levels:
rank.1较为严重的冲突、rank.2严重的冲突、rank.3一般的冲突以及rank.4轻微的冲突;Serious conflicts in rank.1, serious conflicts in rank.2, general conflicts in rank.3, and minor conflicts in rank.4;
同时,记录下存在前三种交通冲突类型的主干道车辆及对应的匝道车辆,记这样的一对车辆为存在交通冲突的车辆对,并对车辆对的标号为vehiclepair.number、对此车辆对中主干道车辆编号为

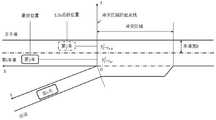
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤4中针对存在交通冲突的主干道车辆,进行换道检测,确定最终的交通冲突严重程度等级;详细地说是对步骤3中存在交通冲突类型的主干道车辆进行是否具有换道行为的检测;换道检测流程图如图6所示,所涉及的参数的标示如图7所示,具体计算子步骤如下:In step 4 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, lane change detection is performed for the main road vehicles that have traffic conflicts, and the final traffic conflict severity level is determined; The main road vehicles of the traffic conflict type are detected whether they have lane-changing behavior; the flow chart of the lane-changing detection is shown in Figure 6, and the labels of the involved parameters are shown in Figure 7. The specific calculation sub-steps are as follows:
(1)由步骤3中可以得到存在交通冲突的主干道车辆编号


(2)计算存在冲突的主干道车辆两个时刻纵坐标的差值的绝对值Δy1,并将此绝对值与车辆所在车道宽度的一半
对主干道上的车辆:For vehicles on main roads:

若是
若是
(3)计算存在冲突的车辆对两个时刻纵坐标差值,即主干道车辆两个时刻纵坐标的差值Δy2,并将此差值与0比较,若是差值大于0,则视为车辆向内侧换道、冲突危险程度减轻一个等级;若是差值小于0,则视为车辆向外侧换道、冲突危险程度增加一个等级;具体计算如下:(3) Calculate the difference between the two time ordinates of vehicles in conflict, that is, the difference Δy2 between the two time ordinates of the main road vehicle, and compare the difference with 0. If the difference is greater than 0, it is regarded as If the difference is less than 0, the vehicle will change lanes to the outside, and the conflict risk will increase by one level; the specific calculation is as follows:
对主干道上的车辆:For vehicles on main roads:

若是
若是
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤5中,根据步骤4中得到的不同交通冲突严重程度在交通预警显示屏发布不同的预警信息;具体如下:In step 5 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, different warning information is released on the traffic warning display screen according to the different severity of traffic conflicts obtained in step 4; the details are as follows:
针对较为严重的冲突,在交通预警显示屏发布“请立即减速慢行”的预警信息;For more serious conflicts, the warning message "Please slow down immediately" is issued on the traffic warning display;
针对严重的冲突,在交通预警显示屏发布“请尽快减速慢行”的预警信息;For serious conflicts, the warning message "Please slow down as soon as possible" is issued on the traffic warning display;
针对一般的冲突,在交通预警显示屏发布“保持车距、小心慢行”的预警信息;For general conflicts, a warning message of "keep your distance and drive slowly" will be issued on the traffic warning display;
针对轻微的冲突,不在交通预警显示屏发布预警信息。For minor conflicts, warning information is not issued on the traffic warning display.
与现有技术相比,本发明的有益效果是:Compared with the prior art, the beneficial effects of the present invention are:
1.本发明首次将基于流量监测的匝道控制引入高速公路合流区交通冲突预警中,通过实时监测匝道的流量变化控制匝道信号灯的变化进而控制匝道车辆的通行,有助于在源头上控制由匝道进入合流区的车辆数量,缓解甚至避开了潜在的合流区交通拥挤。1. For the first time, the present invention introduces the ramp control based on flow monitoring into the traffic conflict warning in the expressway merging area. By monitoring the flow change of the ramp in real time, it controls the change of the ramp signal lights and then controls the passage of the ramp vehicles, which helps to control the traffic flow from the ramp at the source. The number of vehicles entering the merging area alleviates or even avoids potential merging area traffic congestion.
2.本发明考虑到高速公路合流区车辆换道较其他路段更为频繁的实际情况,首次提出将车辆换道行为的检测引入高速公路合流区交通冲突预警等级的最终确定中,有助于保障预警信息的准确性。2. Considering the actual situation that vehicles change lanes more frequently in the expressway merging area than other road sections, the present invention proposes for the first time to introduce the detection of vehicle lane changing behavior into the final determination of the traffic conflict warning level in the expressway merging area, which is helpful to ensure Accuracy of warning information.
3.本发明专门针对高速公路合流区交通冲突将基于流量监测处理结果控制匝道、匝道信号灯显示红灯时对匝道闯红灯行为的判别、匝道信号灯显示绿灯时基于PET对交通冲突严重程度的识别、车辆换道行为的检测及预警信息的发布融为一体,实现了对高速公路合流区交通冲突从源头控制到预警发布的全方位保护、监测及预警信息的发布,非常有助于大大提升高速公路合流区的安全性。3. The present invention is specifically aimed at the traffic conflict in the merging area of the expressway, and will control the ramp based on the flow monitoring and processing results. When the ramp signal light shows a red light, the discrimination of the behavior of running a red light on the ramp, when the ramp signal light shows a green light, the identification of the severity of the traffic conflict based on PET, the vehicle. The detection of lane changing behavior and the release of early warning information are integrated, which realizes all-round protection, monitoring and release of early warning information from source control to early warning release of traffic conflicts in expressway merging areas, which is very helpful to greatly improve expressway merging. area security.
附图说明Description of drawings
图1本发明的总流程图;Fig. 1 general flow chart of the present invention;
图2本发明的匝道信号灯控制的流程图;Fig. 2 is the flow chart of the ramp signal lamp control of the present invention;
图3本发明的匝道车辆闯红灯行为判别流程图;Fig. 3 is a flow chart for judging the behavior of a vehicle running a red light on a ramp of the present invention;
图4本发明的交通冲突判别流程图;Fig. 4 is the flow chart of the traffic conflict judgment of the present invention;
图5本发明的交通冲突判别参数标示示意图图;FIG. 5 is a schematic diagram of a traffic conflict discrimination parameter marking diagram of the present invention;
图6本发明的车辆换道行为检测流程图;6 is a flow chart of the vehicle lane change behavior detection of the present invention;
图7本发明的车辆换道行为检测参数标示图。FIG. 7 is a map showing the detection parameters of the vehicle lane changing behavior according to the present invention.
具体实施方式Detailed ways
为了使本技术领域的人员更好地理解本发明,下面对技术方案的具体实施方式做进一步详细说明。In order to make those skilled in the art better understand the present invention, the specific embodiments of the technical solutions are further described in detail below.
一种基于匝道信号控制的高速公路合流区交通冲突预警方法,流程图如图1所示,包括以下步骤:A method for early warning of traffic conflicts in expressway merging areas based on ramp signal control, the flowchart is shown in Figure 1, including the following steps:
步骤1,基于车流量实时监测比对结果进行匝道红绿灯信号控制,若控制结果为显示红灯,则转步骤2;若控制结果为显示绿灯,则转步骤3;Step 1: Control the ramp traffic light signal based on the real-time monitoring and comparison result of traffic flow. If the control result is that the red light is displayed, go to step 2; if the control result is that the green light is displayed, go to step 3;
步骤2,进行匝道车辆是否有闯红灯情况出现的判别,若出现匝道车辆闯红灯,转步骤5,发布预警信息,否则不进行预警;Step 2, determine whether the on-ramp vehicle has run the red light, if the on-ramp vehicle runs the red light, go to step 5, and issue the warning information, otherwise, no warning will be issued;
步骤3,基于PET进行合流区交通冲突的判别并初步确定交通冲突严重程度等级;Step 3: Based on the PET, the traffic conflict in the merging area is judged and the severity level of the traffic conflict is preliminarily determined;
步骤4,针对存在交通冲突的主干道车辆,进行换道检测,确定最终的交通冲突严重程度等级;Step 4: Perform lane change detection for the main road vehicles with traffic conflicts to determine the final traffic conflict severity level;
步骤5,根据步骤4中得到的不同交通冲突严重程度在交通预警显示屏发布不同的预警信息;Step 5, issuing different warning information on the traffic warning display screen according to the different traffic conflict severity obtained in step 4;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤1中基于车流量实时监测比对结果对单车道匝道进行红绿灯信号控制,匝道信号灯控制流程图如图2所示,需要获取的车流量包括两类:合流区主干道的实时当量交通量Qmain和合流区匝道的当量交通量Qramp;In step 1 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, traffic light signal control is performed on single-lane ramps based on the results of real-time monitoring and comparison of traffic flow. The flow chart of ramp signal light control is shown in Figure 2. The flow includes two types: the real-time equivalent traffic volume Qmain of the main road in the merging area and the equivalent traffic volume Qramp of the merging area ramp ;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤1中基于车流量实时监测比对结果进行匝道控制,车流量的实时监测比对是对合流区主干道车流量和匝道车流量进行比对的,具体的说,是通过提前设定主干道当量交通量警戒值Qmain.warning和匝道当量交通量警戒值Qramp.warning,设置主干道和匝道的当量交通量的警戒值均为其道路设计通行能力的80%,计算方式如下:In step 1 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, ramp control is performed based on the results of real-time monitoring and comparison of traffic flow. For comparison, specifically, by setting the warning value of the equivalent traffic volume of the main road Qmain.warning and the warning value of the equivalent traffic volume of the ramp Qramp.warning in advance, the warning values of the equivalent traffic volume of the main road and the ramp are set to be both. 80% of its road design capacity is calculated as follows:
Qmain.warning=0.8Qmain.set (1)Qmain.warning = 0.8Qmain.set (1)
Qramp.warning=0.8Qramp.set (2)Qramp.warning = 0.8Qramp.set (2)
然后将道路流量监测器实时监测到的合流区主干道的实时当量交通量Qmain.realtime和合流区匝道的实时当量交通量Qramp.realtime与主干道当量交通量警戒值和匝道当量交通量警戒值进行比对,当Qmain.realtime≥Qmain.warning时,不管匝道实时当量交通量是否大于匝道当量交通量的警戒值,匝道信号灯均显示红灯;Then, the real-time equivalent traffic volume Q main.realtime of the main road in the junction area and the real-time equivalent traffic volume Qramp.realtime of the ramp in the junction area monitored by the road flow monitor in real time arecombined with the main road equivalent traffic volume warning value and the ramp equivalent traffic volume warning When Qmain.realtime ≥Qmain.warning , no matter whether the real-time equivalent traffic volume of the ramp is greater than the warning value of the equivalent traffic volume of the ramp, the ramp signal lights will display red light;
当Qmain.realtime<Qmain.warning时,将匝道实时当量交通量与匝道当量交通量的警戒值进行比较,若是Qramp.realtime<Qramp.warning,匝道信号灯显示绿灯、允许匝道车辆进入合流区通行;若是Qramp.realtime≥Qramp.warning,匝道信号灯显示红灯;When Qmain.realtime < Qmain.warning , compare the real-time equivalent traffic volume of the ramp with the warning value of the equivalent traffic volume of the ramp. If Qramp.realtime < Qramp.warning , the ramp signal light will display green light, allowing the ramp vehicles to enter the merge zone traffic; if Qramp.realtime ≥Qramp.warning , the ramp signal light will display red;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤2中进行匝道车辆是否有闯红灯情况出现的判别,这里对闯红灯行为的定义是车辆在相位红灯时间内越过停车线进入冲突区域。匝道车辆是否有闯红灯行为出现的判别流程图如图3所示,具体子步骤如下:In step 2 of a method for early warning of traffic conflict in a highway merging area based on ramp control, it is judged whether the on-ramp vehicle has run a red light. The flow chart for judging whether the on-ramp vehicle has the behavior of running a red light is shown in Figure 3. The specific sub-steps are as follows:
(1)将监测器采集到的匝道上的第n个车辆踏上监测器的时刻及在监测器上的占用时间记录下来,分别记为tn-start和Δtn-occupy,转步骤(2);(1) Record the time when the nth vehicle on the ramp collected by the monitor steps on the monitor and the occupancy time on the monitor, which are recorded as tn-start and Δtn-occupy respectively , and go to step (2) );
(2)识别此车辆是否采取了减速制动:事先设定一个匝道车辆通过停车线的速度警戒值vn-warning,若此车辆通过匝道停车线的估算速度vn-pl小于设定的速度警戒值vn-warning,则视为车辆采取了减速制动、识别为停车行为;否则没有进行减速制动,转步骤(3);(2) Identify whether the vehicle has taken deceleration braking: set a speed warning value vn-warning for the vehicle on the ramp to pass the stop line in advance, if the estimated speed vn-pl of the vehicle passing the stop line on the ramp is less than the set speed If the warning value is vn-warning , it is considered that the vehicle has taken deceleration braking and is identified as a parking behavior; otherwise, no deceleration braking is performed, and go to step (3);
速度警戒值的计算方式如下:The speed warning value is calculated as follows:

式中,vn-warning是匝道车辆通过停车线的速度警戒值,Ds是匝道雷达检测器与匝道停车线之间的距离;where vn-warning is the speed warning value of the ramp vehicle passing the stop line, Ds is the distance between the ramp radar detector and the ramp stop line;
匝道车辆通过匝道停车线的速度估算方式如下:The speed of on-ramp vehicles passing through the stop line of the ramp is estimated as follows:

式中,vn-pl是匝道车辆通过停车线的估算速度,
(3)判断此车辆通过停车线的时刻是否位于红灯开启亮之后:匝道信号灯红灯启亮时刻为tred,而此匝道车辆通过匝道停车线的时刻为tn-pl,若此车辆通过匝道停车线的时刻tn-pl晚于红灯启亮时刻tred,则识别为此车辆具有闯红灯行为、发布“前方车辆闯红灯,请注意安全”的预警信息;否则此车辆没有闯红灯、不发布预警;(3) Judging whether the time when the vehicle passes the stop line is after the red light is turned on: the time when the red light of the ramp signal light is turned on is tred , and the time when the vehicle on the ramp passes the stop line is tn-pl . If the time tn-pl of the stop line of the ramp is later than the time tred of the red light, it is recognized that the vehicle has the behavior of running the red light, and the warning information of "the vehicle ahead runs the red light, please pay attention to safety" is issued; otherwise, the vehicle does not run the red light and will not be issued early warning;
匝道车辆通过匝道停车线时刻的估算方式如下:The estimated time of the on-ramp vehicle passing the ramp stop line is as follows:

式中,tn-pl是匝道车辆通过停车线的估算时间,Lcar.occupy是雷达检测器检测到的匝道车辆在雷达检测器上的占用长度;;Lsetting是雷达检测器的布设长度;In the formula, tn-pl is the estimated time for the ramp vehicle to pass the stop line, Lcar.occupy is the occupied length of the ramp vehicle detected by the radar detector on the radar detector; Lsetting is the layout length of the radar detector;
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤3中基于PET进行合流区交通冲突的判别,具体来说,是基于PET对合流区交通冲突严重程度进行判别,判别流程图如图4,在判别过程中所使用的参数标示如图5所示,具体分为以下子步骤:In step 3 of a method for early warning of traffic conflict in a merging area of a highway based on ramp control, the traffic conflict in the merging area is judged based on PET. Specifically, the severity of the traffic conflict in the merging area is judged based on PET. The flow chart of the judgment is shown in the figure. 4. The parameters used in the discrimination process are marked as shown in Figure 5, and are specifically divided into the following sub-steps:
(1)匝道信号控制灯显示为绿灯,匝道雷达监测器检验有无车辆到达,若有则转(2),否则不进行预警;这个步骤是不可以省略的,因为在前面步骤1中,即使只有匝道没有车流,只要主干道有车流且小于警戒值,匝道信号控制就会显示绿灯,而进行后续步骤有时需要以匝道有车辆经过为前提的;(1) The ramp signal control light is displayed as a green light, and the ramp radar monitor checks whether there is a vehicle arriving, and if so, turn to (2), otherwise no warning will be given; this step cannot be omitted, because in the previous step 1, even if Only the ramp has no traffic flow, as long as the main road has traffic flow and is less than the warning value, the ramp signal control will display a green light, and the subsequent steps sometimes require the premise that there are vehicles passing through the ramp;
(2)考虑到主干道上的车辆受合流区交通状态的影响,可近似认为主干道上的车辆均做匀减速运动,基于雷达检测器对主干道上的车辆进行分车道采集基本交通参数,包括主干道第i车道的第j个车辆距合流区冲突区域起点的距离




解得:Solutions have to:

对单车道匝道上的的第n个车辆进行分车道采集基本交通参数,包括匝道车辆距合流区冲突区域起点的距离xn、速度vn、加速度an、定义匝道车辆到达合流区冲突区域起点的时间tn;此外,为了安全起见,通常会附加一定的安全距离值为d0,以便让驾驶员有足够的反应时间。Collect basic traffic parameters for the n-th vehicle on a single-lane ramp by lane, including the distance xn , speed vn , acceleration an of the ramp vehicle from the starting point of the conflict area in the merging area, and defining the arrival of the vehicle on the ramp to the starting point of the conflict area in the merging area. time tn ; in addition, for the sake of safety, a certain safety distance value d0 is usually added to allow the driver to have enough reaction time.

解得:Solutions have to:

(3)计算主干道车辆与匝道车辆的后侵入时间PET:(3) Calculate the rear intrusion time PET of the main road vehicle and the ramp vehicle:

(4)基于冲突阈值初步判别交通冲突严重程度,同时记录下存在交通冲突的车辆对:由公式(6)~(10)可以估算出主干道车辆与匝道车辆的后侵入时间PET,选取得到的PET的15%、50%、85%分位值作为PET阈值,将交通冲突严重程度划分为4种等级:(4) Preliminarily determine the severity of traffic conflicts based on the conflict threshold, and record the vehicle pairs with traffic conflicts: From formulas (6) to (10), the post-intrusion time PET of the main road vehicle and the ramp vehicle can be estimated, and the obtained The 15%, 50%, and 85% quantiles of PET are used as PET thresholds to divide the severity of traffic conflicts into 4 levels:
rank.1较为严重的冲突、rank.2严重的冲突、rank.3一般的冲突以及rank.4轻微的冲突;Serious conflicts in rank.1, serious conflicts in rank.2, general conflicts in rank.3, and minor conflicts in rank.4;
同时,记录下存在前三种交通冲突类型的主干道车辆及对应的匝道车辆,记这样的一对车辆为存在交通冲突的车辆对,并对车辆对的标号为vehiclepair.number、对此车辆对中主干道车辆编号为

一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤4中针对存在交通冲突的主干道车辆,进行换道检测,确定最终的交通冲突严重程度等级;详细地说是对步骤3中存在交通冲突类型的主干道车辆进行是否具有换道行为的检测;检测车辆是否进行换道是十分有必要的,因为高速公路合流区主干道上的车辆越靠近匝道,发生交通冲突的可能性越大,风险也越大;换道检测流程图如图6所示,所涉及的参数的标示如图7所示,具体计算子步骤如下:In step 4 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, lane change detection is performed for the main road vehicles that have traffic conflicts, and the final traffic conflict severity level is determined; It is necessary to detect whether the vehicles on the main road of the traffic conflict type have lane-changing behavior; it is very necessary to detect whether the vehicle changes lanes, because the closer the vehicles on the main road in the merging area of the expressway are to the ramp, the greater the possibility of traffic conflicts. , the risk is also greater; the flow chart of lane change detection is shown in Figure 6, and the labels of the involved parameters are shown in Figure 7. The specific calculation sub-steps are as follows:
(1)由步骤3中可以得到存在交通冲突的主干道车辆编号


(2)计算存在冲突的主干道车辆两个时刻纵坐标的差值的绝对值Δy1,并将此绝对值与车辆所在车道宽度的一半
对主干道上的车辆:For vehicles on main roads:

若是
若是
(3)计算存在冲突的车辆对两个时刻纵坐标差值,即主干道车辆两个时刻纵坐标的差值Δy2,并将此差值与0比较,若是差值大于0,则视为车辆向内侧换道、冲突危险程度减轻一个等级;若是差值小于0,则视为车辆向外侧换道、冲突危险程度增加一个等级;具体计算如下:(3) Calculate the difference between the two time ordinates of vehicles in conflict, that is, the difference Δy2 between the two time ordinates of the main road vehicle, and compare the difference with 0. If the difference is greater than 0, it is regarded as If the difference is less than 0, the vehicle will change lanes to the outside, and the conflict risk will increase by one level; the specific calculation is as follows:
对主干道上的车辆:For vehicles on main roads:

若是
若是
一种基于匝道控制的高速公路合流区交通冲突预警方法的步骤5中,根据步骤4中得到的不同交通冲突严重程度在交通预警显示屏发布不同的预警信息;具体如下:In step 5 of a method for early warning of traffic conflicts in expressway merging areas based on ramp control, different early warning information is released on the traffic early warning display screen according to the different severity of traffic conflicts obtained in step 4; the details are as follows:
针对较为严重的冲突,在交通预警显示屏发布“请立即减速慢行”的预警信息;For more serious conflicts, the warning message "Please slow down immediately" is issued on the traffic warning display;
针对严重的冲突,在交通预警显示屏发布“请尽快减速慢行”的预警信息;For serious conflicts, the warning message "Please slow down as soon as possible" is issued on the traffic warning display;
针对一般的冲突,在交通预警显示屏发布“保持车距、小心慢行”的预警信息;For general conflicts, a warning message of "keep your distance and drive slowly" will be issued on the traffic warning display;
针对轻微的冲突,不在交通预警显示屏发布预警信息。For minor conflicts, warning information is not issued on the traffic warning display.
Claims (3)

























Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2019112631816 | 2019-12-10 | ||
| CN201911263181 | 2019-12-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111462491Atrue CN111462491A (en) | 2020-07-28 |
| CN111462491B CN111462491B (en) | 2022-03-01 |
Family
ID=71682991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010271459.0AExpired - Fee RelatedCN111462491B (en) | 2019-12-10 | 2020-04-08 | Expressway confluence area traffic conflict early warning method based on ramp control |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111462491B (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111968373A (en)* | 2020-08-27 | 2020-11-20 | 哈尔滨工业大学 | Method for determining lane changing characteristics of reconstruction and extension of highway traffic control area |
| CN112382093A (en)* | 2020-11-13 | 2021-02-19 | 浙江交投高速公路建设管理有限公司 | Highway ramp auxiliary early warning method based on vehicle-road cooperation |
| CN112847388A (en)* | 2020-12-31 | 2021-05-28 | 武汉理工大学 | Construction area dynamic guiding method based on bionic traffic worker robot |
| CN112885085A (en)* | 2021-01-15 | 2021-06-01 | 北京航空航天大学 | Confluence control strategy applied to reconstruction and extension of highway construction area |
| CN112927512A (en)* | 2021-02-24 | 2021-06-08 | 山东科技大学 | Expressway ramp confluence control system and method |
| CN115691152A (en)* | 2021-07-29 | 2023-02-03 | 北京万集科技股份有限公司 | Traffic dispatching method and equipment for ramp junction |
| CN116013076A (en)* | 2023-01-06 | 2023-04-25 | 合肥工业大学 | A dynamic control method for lane changing of main line vehicles in the merge area of expressway |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001025410A3 (en)* | 1999-10-01 | 2002-01-10 | Angstrom Pharmaceuticals Inc | DIAGNOSTIC PROBES AND THERAPEUTICS TARGETING uPA AND uPAR |
| CN1752344A (en)* | 2005-10-18 | 2006-03-29 | 钱红波 | T-type signal control crossing traffic designing and traffic controlling method |
| CN102073853A (en)* | 2011-01-14 | 2011-05-25 | 华南理工大学 | Method for tracking multi-target vehicles by adopting MCMC (Markov Chain Monte Carlo) algorithm |
| CN102509067A (en)* | 2011-09-22 | 2012-06-20 | 西北工业大学 | Detection method for lane boundary and main vehicle position |
| CN103077280A (en)* | 2013-01-12 | 2013-05-01 | 天津市市政工程设计研究院 | Traffic design method for branch and confluent areas of underground road for safety of large vehicles |
| CN105654779A (en)* | 2016-02-03 | 2016-06-08 | 北京工业大学 | Expressway construction area traffic flow coordination control method based on vehicle-road and vehicle-vehicle communication |
| CN110956851A (en)* | 2019-12-02 | 2020-04-03 | 清华大学 | A method for cooperative scheduling and lane changing of intelligent networked vehicles |
| CN110968909A (en)* | 2018-09-30 | 2020-04-07 | 北京建筑大学 | A Non-motor Vehicle Simulation Method Based on Discrete Element Simulation Platform |
- 2020
- 2020-04-08CNCN202010271459.0Apatent/CN111462491B/ennot_activeExpired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001025410A3 (en)* | 1999-10-01 | 2002-01-10 | Angstrom Pharmaceuticals Inc | DIAGNOSTIC PROBES AND THERAPEUTICS TARGETING uPA AND uPAR |
| CN1752344A (en)* | 2005-10-18 | 2006-03-29 | 钱红波 | T-type signal control crossing traffic designing and traffic controlling method |
| CN102073853A (en)* | 2011-01-14 | 2011-05-25 | 华南理工大学 | Method for tracking multi-target vehicles by adopting MCMC (Markov Chain Monte Carlo) algorithm |
| CN102509067A (en)* | 2011-09-22 | 2012-06-20 | 西北工业大学 | Detection method for lane boundary and main vehicle position |
| CN103077280A (en)* | 2013-01-12 | 2013-05-01 | 天津市市政工程设计研究院 | Traffic design method for branch and confluent areas of underground road for safety of large vehicles |
| CN105654779A (en)* | 2016-02-03 | 2016-06-08 | 北京工业大学 | Expressway construction area traffic flow coordination control method based on vehicle-road and vehicle-vehicle communication |
| CN110968909A (en)* | 2018-09-30 | 2020-04-07 | 北京建筑大学 | A Non-motor Vehicle Simulation Method Based on Discrete Element Simulation Platform |
| CN110956851A (en)* | 2019-12-02 | 2020-04-03 | 清华大学 | A method for cooperative scheduling and lane changing of intelligent networked vehicles |
Non-Patent Citations (2)
| Title |
|---|
| 徐康俊: "智能汽车换道轨迹规划方法的研究", 《中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》* |
| 马艳丽等: "基于PET算法的匝道合流区交通冲突识别模型", 《交通运输系统工程与信息》* |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111968373A (en)* | 2020-08-27 | 2020-11-20 | 哈尔滨工业大学 | Method for determining lane changing characteristics of reconstruction and extension of highway traffic control area |
| CN112382093A (en)* | 2020-11-13 | 2021-02-19 | 浙江交投高速公路建设管理有限公司 | Highway ramp auxiliary early warning method based on vehicle-road cooperation |
| CN112847388A (en)* | 2020-12-31 | 2021-05-28 | 武汉理工大学 | Construction area dynamic guiding method based on bionic traffic worker robot |
| CN112847388B (en)* | 2020-12-31 | 2022-04-29 | 武汉理工大学 | Construction area dynamic guiding method based on bionic traffic worker robot |
| CN112885085A (en)* | 2021-01-15 | 2021-06-01 | 北京航空航天大学 | Confluence control strategy applied to reconstruction and extension of highway construction area |
| CN112927512A (en)* | 2021-02-24 | 2021-06-08 | 山东科技大学 | Expressway ramp confluence control system and method |
| CN112927512B (en)* | 2021-02-24 | 2022-03-29 | 山东科技大学 | A kind of expressway ramp merge control system and method |
| CN115691152A (en)* | 2021-07-29 | 2023-02-03 | 北京万集科技股份有限公司 | Traffic dispatching method and equipment for ramp junction |
| CN116013076A (en)* | 2023-01-06 | 2023-04-25 | 合肥工业大学 | A dynamic control method for lane changing of main line vehicles in the merge area of expressway |
| CN116013076B (en)* | 2023-01-06 | 2023-11-03 | 合肥工业大学 | A dynamic control method for lane changing of main line vehicles in expressway merging areas |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111462491B (en) | 2022-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111462491A (en) | A Traffic Conflict Early Warning Method Based on Ramp Control in Expressway Convergence Area | |
| CN105654779B (en) | Highway construction area traffic coordinating and controlling method based on bus or train route, truck traffic | |
| CN104210489B (en) | Vehicle and pedestrian impact bypassing method and system under bus or train route cooperative surroundings | |
| CN109102696B (en) | Conflict early warning method for frequent intersections based on active safety | |
| CN105405321B (en) | Safe early warning method and system in vehicle on expressway traveling | |
| CN109584571A (en) | Intersection pre-warning and control method and system and sensing device used | |
| CN102779420B (en) | Road traffic event automatic detection method based on real-time vehicle-mounted GPS (global position system) data | |
| CN107622669A (en) | A method for identifying whether a right-turning motor vehicle yields to pedestrians | |
| KR20180086632A (en) | Apparatus amd method of determining action of an autonomous vehicle | |
| CN106251661B (en) | Tunnel portal section wagon flow control method | |
| CN113192327B (en) | Road operation risk active prevention and control system and method considering traffic flow and individuals | |
| CN106097747B (en) | A kind of crossing anticollision intelligent signal lamp device and its control method | |
| WO2022213542A1 (en) | Method and system for clearing information-controlled intersection on basis of lidar and trajectory prediction | |
| JP2022521137A (en) | How to make your vehicle safe | |
| CN108597252B (en) | Traffic light intersection pedestrian and vehicle safe passing intelligent judgment system and method | |
| CN104200681A (en) | Signalized-intersection vehicle-road-cooperated method for preventing bus conflicts | |
| CN117864165B (en) | Early warning method based on intelligent vehicle monitoring | |
| CN103192785A (en) | Whole monitoring system for three-dimensional space around vehicle | |
| CN113257024A (en) | Expressway rear-end collision prevention early warning method and system based on V2I | |
| CN115158318B (en) | Intelligent driving control method and system for bus stations | |
| CN111260915A (en) | An early warning and reminder method for pedestrians staying in abnormal areas of expressway traffic | |
| CN108615383A (en) | A kind of mechanical transport crossing auxiliary traffic system and its control method based on inter-vehicle communication | |
| CN104575047A (en) | System and method for preventing motor vehicle from rushing for green light to block road junction and running red light in reminding mode | |
| CN113450595A (en) | Human-vehicle interaction anti-collision early warning system and early warning method | |
| CN113879211B (en) | Reminding method and system for preventing collision of motor vehicle with Cheng Yufei turning right of dregs car |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20220301 | |
| CF01 | Termination of patent right due to non-payment of annual fee |