CN111007400A - Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering method - Google Patents
Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering methodDownload PDFInfo
- Publication number
- CN111007400A CN111007400ACN201911158088.9ACN201911158088ACN111007400ACN 111007400 ACN111007400 ACN 111007400ACN 201911158088 ACN201911158088 ACN 201911158088ACN 111007400 ACN111007400 ACN 111007400A
- Authority
- CN
- China
- Prior art keywords
- state
- soc
- value
- internal resistance
- polarization
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/367—Software therefor, e.g. for battery testing using modelling or look-up tables
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/392—Determining battery ageing or deterioration, e.g. state of health
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/15—Correlation function computation including computation of convolution operations
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Computational Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Algebra (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Tests Of Electric Status Of Batteries (AREA)
- Secondary Cells (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于锂电池状态估算技术领域,具体涉及一种基于自适应双扩展卡尔曼滤波法的SOC估算方法。The invention belongs to the technical field of lithium battery state estimation, and in particular relates to an SOC estimation method based on an adaptive double extended Kalman filter method.
背景技术Background technique
随着清洁能源的发展,锂电池在风、光储能、电动汽车等领域中获得了越来越多的应用。为了保证电池安全有效地运行,需要建立一套电池管理系统,实时监测电池的电压、电流、温度等参数,准确估算电池的荷电状态(State of Charge,SOC)、健康状态等状态信息。其中,准确估算SOC是其它状态估计的基础;可以避免过充过放,延长电池寿命;还可以帮助用户制定正确的产品使用计划,具有十分重要的意义。With the development of clean energy, lithium batteries have gained more and more applications in wind, solar energy storage, electric vehicles and other fields. In order to ensure the safe and effective operation of the battery, a battery management system needs to be established to monitor the voltage, current, temperature and other parameters of the battery in real time, and accurately estimate the state of charge (SOC) and state of health of the battery. Among them, accurate estimation of SOC is the basis of other state estimation; it can avoid overcharge and overdischarge, prolong battery life; it can also help users formulate correct product usage plans, which is of great significance.
目前估算SOC的方法主要有安时积分法、开路电压法、神经网络法、扩展卡尔曼滤波法(Extend Kalman Filter,EKF)。安时积分法原理简单,易于实现,但是无法提供SOC的初值,而且存在积分运算使误差累积越来越大的问题。开路电压法(Open CircuitVoltage,OCV)依靠开路电压与SOC之间的SOC-OCV关系曲线,得到SOC的值,简单直接,但是由于需要测量开路电压,无法在电池充放电过程使用。神经网络法不需要考虑电池的内部结构,但前提是要用大量实验数据进行训练,估算精度依托于训练数据的针对性与全面性,而且此类算法普遍较为复杂,难以实现。EKF算法可以将安时积分法和开路电压法有效结合,对安时积分法的结果进行实时修正,消除累计误差,而且估算结果不依赖于SOC的初值,是目前研究的主流方法。但是EKF算法在估算过程中将系统噪声假定为确定的高斯白噪声,这与实际不符,可能会导致较大的估算误差。而且EKF算法是基于模型的算法,模型的精度很大程度上影响了估算结果的准确性,但是电池内部参数在不断变化,会使模型精度降低,这也会影响算法估算的准确性。At present, the methods for estimating SOC mainly include ampere-hour integration method, open circuit voltage method, neural network method, and Extended Kalman Filter (EKF). The ampere-hour integration method is simple in principle and easy to implement, but cannot provide the initial value of SOC, and there is a problem that the integration operation makes the accumulation of errors larger and larger. The Open Circuit Voltage (OCV) method relies on the SOC-OCV relationship between the open circuit voltage and SOC to obtain the SOC value, which is simple and direct, but cannot be used in the battery charging and discharging process due to the need to measure the open circuit voltage. The neural network method does not need to consider the internal structure of the battery, but the premise is to use a large amount of experimental data for training, and the estimation accuracy depends on the pertinence and comprehensiveness of the training data, and such algorithms are generally complex and difficult to implement. The EKF algorithm can effectively combine the ampere-hour integration method and the open-circuit voltage method, correct the results of the ampere-hour integration method in real time, eliminate accumulated errors, and the estimation results do not depend on the initial value of SOC, which is the mainstream method in current research. However, in the estimation process of the EKF algorithm, the system noise is assumed to be a definite Gaussian white noise, which is inconsistent with the actual situation and may lead to a large estimation error. Moreover, the EKF algorithm is a model-based algorithm. The accuracy of the model greatly affects the accuracy of the estimation results, but the constant changes in the internal parameters of the battery will reduce the accuracy of the model, which will also affect the accuracy of the algorithm estimation.
发明内容SUMMARY OF THE INVENTION
本发明的目的是提供一种基于自适应双扩展卡尔曼滤波法的锂电池SOC估算方法,解决了现有技术中存在的噪声统计特性未知的问题,同时利用卡尔曼滤波算法估算电池的欧姆内阻,提高了模型精度。The purpose of the present invention is to provide a lithium battery SOC estimation method based on the adaptive double extended Kalman filter method, which solves the problem of unknown statistical characteristics of noise in the prior art, and uses the Kalman filter algorithm to estimate the ohmic SOC of the battery. resistance, which improves the model accuracy.
本发明所采用的技术方案是,一种基于自适应双扩展卡尔曼滤波法的锂电池SOC估算方法,具体按照以下步骤实施:The technical solution adopted in the present invention is a lithium battery SOC estimation method based on the adaptive double extended Kalman filter method, which is specifically implemented according to the following steps:
步骤1、建立锂电池的二阶RC等效电路模型;
步骤2、通过脉冲充放电实验确定锂电池不同荷电状态SOC处的开路电压以及电池等效模型参数,然后通过函数拟合得到开路电压与SOC的具体函数关系,构建出其它模型参数与不同SOC处的关系,其它模型参数包括欧姆内阻、电化学极化电阻、电化学极化电容、浓度差极化电阻、浓度差极化电容值;Step 2. Determine the open circuit voltage and battery equivalent model parameters of the lithium battery at different states of charge SOC through pulse charge and discharge experiments, and then obtain the specific functional relationship between the open circuit voltage and SOC through function fitting, and construct other model parameters and different SOCs Other model parameters include ohmic internal resistance, electrochemical polarization resistance, electrochemical polarization capacitance, concentration difference polarization resistance, concentration difference polarization capacitance value;
步骤3、根据锂电池的等效电路模型,分别建立以SOC、极化电压为状态变量的状态空间方程和以欧姆内阻为状态变量的状态空间方程;Step 3. According to the equivalent circuit model of the lithium battery, respectively establish a state space equation with SOC and polarization voltage as state variables and a state space equation with ohmic internal resistance as state variables;
步骤4、运用自适应扩展卡尔曼滤波算法估算电池的SOC,同时运用卡尔曼滤波算法估算电池的欧姆内阻,最终迭代计算实时获得锂电池的荷电状态SOC值。Step 4. Use the adaptive extended Kalman filter algorithm to estimate the SOC of the battery, and at the same time use the Kalman filter algorithm to estimate the ohmic internal resistance of the battery, and finally obtain the SOC value of the state of charge of the lithium battery in real time by iterative calculation.
本发明的特点还在于,The present invention is also characterized in that,
步骤1中锂电池的二阶RC等效电路模型包括两个串联在一起的RC并联电路,其中一个RC并联电路的电化学极化电阻RL与电化学极化电容CL之间与充放电方向的开路电压源连接后接入电压,另一个RC并联电路的浓度差极化电阻RS与浓度差极化电容CS共同串联欧姆内阻Ro后接入电压。The second-order RC equivalent circuit model of the lithium battery in
步骤2中将开路电压按照充、放电方向分为两个部分,当处于放电状态时,放电开路电压UOC及其所串联的二极管工作,充电开路电压U’OC不工作;当处于充电状态时,充电开路电压U’OC及其所串联的二极管工作,放电开路电压UOC不工作,在锂电池充电或放电两个过程中,每个过程因充电或放电电流方向不同而选择各自开路电压源UOC或U’OC,由此分别得到充电和放电过程的开路电压与SOC的关系,以及欧姆内阻、电化学极化电阻、电化学极化电容、浓度差极化电阻、浓度差极化电容值在放电过程中与SOC的对应关系;In step 2, the open-circuit voltage is divided into two parts according to the charging and discharging directions. When in the discharging state, the discharging open-circuit voltage UOC and the diode connected in series work, and the charging open-circuit voltage U'OC does not work; when in the charging state , the charging open-circuit voltage U'OC and the diode connected in series work, and the discharging open-circuit voltage UOC does not work. In the two processes of charging or discharging the lithium battery, each process selects its own open-circuit voltage source due to the different direction of the charging or discharging current. UOC or U'OC , the relationship between the open circuit voltage and SOC in the charging and discharging process, as well as the ohmic internal resistance, electrochemical polarization resistance, electrochemical polarization capacitance, concentration difference polarization resistance, concentration difference polarization Corresponding relationship between capacitance value and SOC during discharge process;
步骤3中所述建立的以SOC、极化电压为状态变量的锂电池SOC、电化学极化电压UL与浓度差极化电压US的状态空间方程为:The state space equation of the lithium battery SOC, electrochemical polarization voltage UL and concentration difference polarization voltage US established in step 3 with SOC and polarization voltage as state variables is:

锂电池端电压方程如下:The lithium battery terminal voltage equation is as follows:
U(k)=UOC(SOCk)-US(k)-UL(k)-Ro(k)i(k)+vkU(k)=UOC (SOCk )-US (k)-UL (k)-Ro (k)i(k)+vk
其中,ΔT为采样时间,Ro为电池的欧姆内阻,RL、CL分别为电池的电化学极化电阻和极化电容,RS、CS分别为电池的浓度差极化电阻和极化电容,τL、τS分别代表电化学极化时间常数与浓度差极化时间常数,其中τL=RL CL,τS=RS CS,US为RS两端的电压,UL为RL两端的电压,UOC为电池的开路电压,i为电池的工作电流,U为电池的工作电压,wk为SOC估算过程噪声,vk为SOC估算测量噪声,CN代表锂电池当前容量,k代表当前时刻迭代计算步数,SOC(k)代表第k次计算中的荷电状态SOC值。Among them, ΔT is the sampling time,Ro is the ohmic internal resistance of the battery,RL andCL are the electrochemical polarization resistance and polarization capacitance of the battery, respectively, RS andCS are the concentration difference polarization resistance and Polarization capacitance, τL and τS represent the electrochemical polarization time constant and the concentration difference polarization time constant, respectively, where τL =RL CL , τS =RS CS , and US is the voltage across RS , UL is the voltage at both ends of RL , UOC is the open circuit voltage of the battery, i is the working current of the battery, U is the working voltage of the battery, wk is the SOC estimation process noise, vk is the SOC estimation measurement noise, CN Represents the current capacity of the lithium battery, k represents the number of iterative calculation steps at the current moment, and SOC(k) represents the state of charge SOC value in the k-th calculation.
所建立的以欧姆内阻为状态变量的状态空间方程为:The established state space equation with ohmic internal resistance as the state variable is:
Ro,k=Ro,k-1+rkRo,k =Ro,k-1 +rk
U(k)=UOC(SOCk)-US(k)-UL(k)-Ro(k)i(k)+qkU(k)=UOC (SOCk )-US (k)-UL (k)-Ro (k)i(k)+qk
其中,rk为以欧姆内阻Ro为状态变量的卡尔曼滤波法估算过程噪声,qk为以欧姆内阻Ro为状态变量的卡尔曼滤波法估算测量噪声,Ro,k为第k次迭代计算中的欧姆内阻估计值,Ro,k-1为前一次即第k-1次的欧姆内阻估计值。Among them, rk is the estimated process noise by the Kalman filter method with the ohmic internal resistance Ro as the state variable, qk is the estimated measurement noise by the Kalman filter method with the ohmic internal resistanceRo as the state variable, and Ro,k are the first The estimated value of the ohmic internal resistance in the k-th iterative calculation, Ro,k-1 is the estimated value of the ohmic internal resistance of the previous time, that is, the k-1th time.
步骤4具体按照以下步骤实施:Step 4 is implemented according to the following steps:
步骤4.1、设定锂电池荷电状态SOC和卡尔曼滤波算法中的状态误差协方差P的初值,选择系统噪声值为10-4,由SOC初值以及步骤2中的其它模型参数与SOC对应关系得到欧姆内阻的初值;Step 4.1. Set the lithium battery state of charge SOC and the initial value of the state error covariance P in the Kalman filter algorithm, and select the system noise value of 10-4 . Correspondence to get the initial value of ohmic internal resistance;
步骤4.2、根据此时荷电状态SOC的估算结果,结合步骤2中的其他模型参数与SOC对应关系,得到等效电路模型中的电化学极化内阻RL与电容CL、浓度差极化电阻RS与电容CS的值;对于不在对应关系表内的荷电状态SOC值,采用左侧临近SOC对应的参数值代替;Step 4.2: According to the estimation result of the state of charge SOC at this time, combined with the corresponding relationship between other model parameters and SOC in step 2, obtain the electrochemical polarization internal resistanceRL and capacitanceCL and concentration difference in the equivalent circuit model. The value of the resistance RS and the capacitance CS ; for the state of charge SOC value that is not in the corresponding relationship table, the parameter value corresponding to the adjacent SOC on the left is used instead;
步骤4.3、由荷电状态SOC与欧姆内阻Ro各自的状态方程,分别迭代计算SOC和欧姆内阻的状态预测值和误差协方差预测值;Step 4.3, from the respective state equations of the state of charge SOC and the ohmic internal resistance Ro , iteratively calculate the state predicted value and the error covariance predicted value of the SOC and the ohmic internal resistance respectively;
步骤4.4、计算荷电状态SOC和欧姆内阻的卡尔曼滤波增益P;Step 4.4, calculate the Kalman filter gain P of the state of charge SOC and the ohmic internal resistance;
步骤4.5、将荷电状态SOC和欧姆内阻的状态预测值代入观测方程得到观测量的预测值;Step 4.5: Substitute the state predicted values of the state of charge SOC and the ohmic internal resistance into the observation equation to obtain the predicted value of the observed amount;
步骤4.6、计算系统量测新息;Step 4.6, the computing system measures the innovation;
步骤4.7、由量测新息,和荷电状态SOC与欧姆内阻各自的卡尔曼滤波增益得到当前时刻的状态估计量并更新误差协方差;Step 4.7, obtain the state estimator at the current moment and update the error covariance from the measurement innovation and the respective Kalman filter gains of the state of charge SOC and the ohmic internal resistance;
步骤4.8、调整荷电状态SOC估算的过程噪声协方差;Step 4.8, adjust the process noise covariance of the state of charge SOC estimation;
步骤4.9、将步骤4.3得到的状态量、误差协方差和步骤4.4得到的增益P、步骤4.5得到的观测量预测值以及步骤4.6得到的新息代入步骤4.2中,得到锂电池荷电状态SOC的值,并开始新一轮的循环迭代。Step 4.9. Substitute the state quantity and error covariance obtained in step 4.3, the gain P obtained in step 4.4, the predicted value of the observed quantity obtained in step 4.5, and the innovation obtained in step 4.6 into step 4.2, and obtain the state of charge SOC of the lithium battery. value, and start a new round of loop iteration.
步骤4.3具体如下:Step 4.3 is as follows:
计算状态预测值式子为:The formula for calculating the state prediction value is:

其中,

计算误差协方差预测式子为:The prediction formula for calculating the error covariance is:
Pk/k-1=Fk-1Pk-1Fk-1T+QkPk/k-1 =Fk-1 Pk-1 Fk-1T +Qk
其中,Pk/k-1为当前时刻的状态预测值,Pk-1为前一时刻的状态量,Qk为当前时刻的过程噪声协方差,Fk-1由状态预测函数
步骤4.4具体如下:Step 4.4 is as follows:
计算卡尔曼滤波增益为:Calculate the Kalman filter gain as:
Kk=Pk/k-1GkT(GkPk/k-1GkT+R)-1Kk =Pk/k-1 GkT (Gk Pk/k-1 GkT +R)-1
其中,Pk/k-1为当前时刻的状态预测值,Kk为当前时刻的卡尔曼滤波增益,R为测量噪声协方差,Gk由观测函数对当前时刻的状态预测值求雅克比矩阵得到。Among them, Pk/k-1 is the state prediction value at the current moment, Kk is the Kalman filter gain at the current moment, R is the measurement noise covariance, and Gk is the Jacobian matrix calculated by the observation function for the state prediction value at the current moment. get.
步骤4.6具体如下:Step 4.6 is as follows:
计算系统量测新息:Computing system measurement innovation:
υj=yj-yj/j-1υj =yj -yj/j-1
其中,υj表示系统量测新息,yj表示前面某一时刻的系统量测值,yj/j-1表示前面某一时刻的系统量测的预测值,j表示某一历史时刻迭代计算步数。Among them, υj represents the system measurement innovation, yj represents the system measurement value at a previous moment, yj/j-1 represents the predicted value of the system measurement at a previous moment, and j represents the iteration at a certain historical moment. Count steps.
步骤4.7具体如下:Step 4.7 is as follows:
计算当前时刻的状态估计量:Compute the state estimator at the current moment:

其中,yk为当前时刻观测值,g为观测函数;Among them, yk is the observation value at the current moment, and g is the observation function;
更新误差协方差:Update the error covariance:
Pk=(E-KkGk)Pk/k-1Pk =(EKk Gk )Pk/k-1
其中,E代表单位矩阵,Pk/k-1为当前时刻的状态预测值,Kk为当前时刻的卡尔曼滤波增益,Gk由观测函数对当前时刻的状态预测值求雅克比矩阵得到。Among them, E represents the identity matrix, Pk/k-1 is the state prediction value at the current moment, Kk is the Kalman filter gain at the current moment, and Gk is obtained by calculating the Jacobian matrix of the state prediction value at the current moment by the observation function.
步骤4.8具体如下:Step 4.8 is as follows:
调整荷电状态SOC估算的过程噪声协方差:Adjust the process noise covariance for the state-of-charge SOC estimate:

Qk=KkSkKkTQk =Kk Sk KkT
其中,m表示统计量测新息历史信息的窗口宽度,Sk表示前m个量测新息的均值,υj表示系统量测新息,Kk为当前时刻的卡尔曼滤波增益,Qk为当前时刻的过程噪声协方差,k表示当前时刻迭代计算步数,j表示某一历史时刻迭代计算步数。Among them, m represents the window width of the historical information of statistical measurement innovation, Sk represents the mean value of the first m measurement innovations, υj represents the system measurement innovation, Kk is the Kalman filter gain at the current moment, Qk is the process noise covariance at the current moment, k represents the number of iterative calculation steps at the current moment, and j represents the number of iterative calculation steps at a certain historical moment.
本发明的有益效果是:The beneficial effects of the present invention are:
(1)一种基于自适应双扩展卡尔曼滤波法的锂电池SOC估算方法,与传统安时积分法相比,本发明的估算结果不依赖于SOC初值,即使初值不准确,经过若干次迭代之后,也能快速收敛到真值。而且本发明具有抑制系统噪声的作用,可以消除积分累计误差的影响。(1) A lithium battery SOC estimation method based on the adaptive double extended Kalman filter method. Compared with the traditional ampere-hour integration method, the estimation result of the present invention does not depend on the initial value of SOC, even if the initial value is not accurate, after several times After iteration, it can also quickly converge to the true value. Moreover, the present invention has the function of suppressing system noise, and can eliminate the influence of integral accumulation error.
(2)与采用单一方向的SOC-OCV曲线相比,本发明在充、放电时分别采用充电和放电方向的SOC-OCV曲线,使电池的等效模型在充放电不断交替进行的工况条件下也能适用,算法的估算精度不会因电流方向的变化而下降。(2) Compared with the SOC-OCV curve that adopts a single direction, the present invention adopts the SOC-OCV curve of the charging and discharging directions respectively during charging and discharging, so that the equivalent model of the battery is under the working conditions of alternating charging and discharging. It can also be applied below, and the estimation accuracy of the algorithm will not be degraded by the change of the current direction.
(3)与一般的扩展卡尔曼滤波法相比,本发明在扩展卡尔曼滤波法的基础上采用自适应调整噪声协方差的方法,解决了实际中噪声统计特性未知的问题,能够适应不同工况,提高估算精度。除此以外,考虑到同时调整过程噪声协方差和测量噪声协方差容易造成滤波发散,本发明采用只调整过程噪声协方差的方法,降低了滤波发散的可能性。(3) Compared with the general extended Kalman filter method, the present invention adopts the method of adaptively adjusting the noise covariance on the basis of the extended Kalman filter method, which solves the problem of unknown statistical characteristics of noise in practice, and can adapt to different working conditions , to improve the estimation accuracy. In addition, considering that adjusting the process noise covariance and the measurement noise covariance at the same time is likely to cause filtering divergence, the present invention adopts a method of only adjusting the process noise covariance, which reduces the possibility of filtering divergence.
(4)与对等效电路模型参数取定值的做法相比,本发明采用卡尔曼滤波算法对受电流、温度、老化情况等因素影响较大的欧姆内阻进行动态估算,能实时跟踪电池内部主要参数的变化,在电池内外条件改变的情况下也具有较高的估算精度。(4) Compared with the method of setting the parameters of the equivalent circuit model, the present invention uses the Kalman filter algorithm to dynamically estimate the ohmic internal resistance that is greatly affected by factors such as current, temperature, and aging conditions, and can track the battery in real time. The change of the main internal parameters also has a high estimation accuracy in the case of changes in the internal and external conditions of the battery.
附图说明Description of drawings
图1为锂电池二阶RC等效电路模型;Figure 1 shows the second-order RC equivalent circuit model of a lithium battery;
图2为算法的原理图;Figure 2 is a schematic diagram of the algorithm;
图3为算法的流程图;Fig. 3 is the flow chart of algorithm;
图4为动态应力测试工况单周期电流;Figure 4 shows the single-cycle current in the dynamic stress test condition;
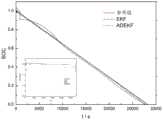
图5为采用本发明的算法估算SOC的估算结果和误差图。FIG. 5 is an estimation result and error diagram of SOC estimation using the algorithm of the present invention.
具体实施方式Detailed ways
下面结合附图和具体实施方式对本发明进行详细说明。The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
本发明一种基于自适应双扩展卡尔曼滤波法的锂电池SOC估算方法,具体按照以下步骤实施:The present invention is a lithium battery SOC estimation method based on the adaptive double extended Kalman filter method, which is specifically implemented according to the following steps:
步骤1、如图1所示,建立锂电池的二阶RC等效电路模型;
步骤1中锂电池的二阶RC等效电路模型包括两个串联在一起的RC并联电路,其中一个RC并联电路的电化学极化电阻RL与电化学极化电容CL之间与充放电方向的开路电压源连接后接入电压,另一个RC并联电路的浓度差极化电阻RS与浓度差极化电容CS共同串联欧姆内阻Ro后接入电压。The second-order RC equivalent circuit model of the lithium battery in
步骤2、通过脉冲充放电实验确定锂电池不同荷电状态SOC处的开路电压以及电池等效模型参数,然后通过函数拟合得到开路电压与SOC的具体函数关系,构建出其它模型参数与不同SOC处的关系,其它模型参数包括欧姆内阻、电化学极化电阻、电化学极化电容、浓度差极化电阻、浓度差极化电容值;Step 2. Determine the open circuit voltage and battery equivalent model parameters of the lithium battery at different states of charge SOC through pulse charge and discharge experiments, and then obtain the specific functional relationship between the open circuit voltage and SOC through function fitting, and construct other model parameters and different SOCs Other model parameters include ohmic internal resistance, electrochemical polarization resistance, electrochemical polarization capacitance, concentration difference polarization resistance, concentration difference polarization capacitance value;
电池的等效电路模型中,开路电压按照充、放电方向分为两个部分,每个部分因电流方向的不同与SOC具有不同的关系,需要分别得到充电和放电过程的开路电压与SOC的关系。In the equivalent circuit model of the battery, the open circuit voltage is divided into two parts according to the direction of charge and discharge. Each part has a different relationship with the SOC due to the different direction of the current. It is necessary to obtain the relationship between the open circuit voltage and the SOC during the charging and discharging process. .
步骤2中将开路电压按照充、放电方向分为两个部分,当处于放电状态时,放电开路电压UOC及其所串联的二极管工作,充电开路电压U’OC不工作;当处于充电状态时,充电开路电压U’OC及其所串联的二极管工作,放电开路电压UOC不工作,在锂电池充电或放电两个过程中,每个过程因充电或放电电流方向不同而选择各自开路电压源UOC或U’OC,由此分别得到充电和放电过程的开路电压与SOC的关系,以及欧姆内阻、电化学极化电阻、电化学极化电容、浓度差极化电阻、浓度差极化电容值在放电过程中与SOC的对应关系;In step 2, the open-circuit voltage is divided into two parts according to the charging and discharging directions. When in the discharging state, the discharging open-circuit voltage UOC and the diode connected in series work, and the charging open-circuit voltage U'OC does not work; when in the charging state , the charging open-circuit voltage U'OC and the diode connected in series work, and the discharging open-circuit voltage UOC does not work. In the two processes of charging or discharging the lithium battery, each process selects its own open-circuit voltage source due to the different direction of the charging or discharging current. UOC or U'OC , the relationship between the open circuit voltage and SOC in the charging and discharging process, as well as the ohmic internal resistance, electrochemical polarization resistance, electrochemical polarization capacitance, concentration difference polarization resistance, concentration difference polarization The corresponding relationship between the capacitance value and the SOC during the discharge process;
步骤3、根据锂电池的等效电路模型,分别建立以SOC、极化电压为状态变量的状态空间方程和以欧姆内阻为状态变量的状态空间方程;Step 3. According to the equivalent circuit model of the lithium battery, respectively establish a state space equation with SOC and polarization voltage as state variables and a state space equation with ohmic internal resistance as state variables;
步骤3中建立的以SOC、极化电压为状态变量的锂电池SOC、电化学极化电压UL与浓度差极化电压US的状态空间方程为:The state space equations of lithium battery SOC, electrochemical polarization voltageUL and concentration difference polarization voltage U Sestablished in step 3 with SOC and polarization voltage as state variables are:

锂电池端电压方程如下:The lithium battery terminal voltage equation is as follows:
U(k)=UOC(SOCk)-US(k)-UL(k)-Ro(k)i(k)+vkU(k)=UOC (SOCk )-US (k)-UL (k)-Ro (k)i(k)+vk
其中,ΔT为采样时间,Ro为电池的欧姆内阻,RL、CL分别为电池的电化学极化电阻和极化电容,RS、CS分别为电池的浓度差极化电阻和极化电容,τL、τS分别代表电化学极化时间常数与浓度差极化时间常数,其中τL=RL CL,τS=RS CS,US为RS两端的电压,UL为RL两端的电压,UOC为电池的开路电压,i为电池的工作电流,U为电池的工作电压,wk为SOC过程噪声,vk为SOC测量噪声,CN代表锂电池当前容量,k代表当前时刻迭代计算步数,SOC(k)代表第k次计算中的荷电状态SOC值。Among them, ΔT is the sampling time,Ro is the ohmic internal resistance of the battery,RL andCL are the electrochemical polarization resistance and polarization capacitance of the battery, respectively, RS andCS are the concentration difference polarization resistance and Polarization capacitance, τL and τS represent the electrochemical polarization time constant and the concentration difference polarization time constant, respectively, where τL =RL CL , τS =RS CS , and US is the voltage across RS , UL is the voltage at both ends of RL , UOC is the open circuit voltage of the battery, i is the working current of the battery, U is the working voltage of the battery, wk is the SOC process noise, vk is the SOC measurement noise, andCN represents lithium The current capacity of the battery, k represents the number of iterative calculation steps at the current moment, and SOC(k) represents the SOC value of the state of charge in the k-th calculation.
所建立的以欧姆内阻为状态变量的状态空间方程为:The established state space equation with ohmic internal resistance as the state variable is:
Ro,k=Ro,k-1+rkRo,k =Ro,k-1 +rk
U(k)=UOC(SOCk)-US(k)-UL(k)-Ro(k)i(k)+qkU(k)=UOC (SOCk )-US (k)-UL (k)-Ro (k)i(k)+qk
其中,rk为以欧姆内阻Ro为状态变量的卡尔曼滤波法估算的过程噪声,qk为以欧姆内阻Ro为状态变量的卡尔曼滤波法估算的测量噪声,Ro,k为第k次迭代计算中的欧姆内阻估计值,Ro,k-1为前一次即第k-1次的欧姆内阻估计值。Among them, rk is the process noise estimated by the Kalman filtering method with the ohmic internal resistance Ro as the state variable, qk is the measurement noise estimated by the Kalman filtering method with the ohmic internal resistanceRo as the state variable, Ro,k is the estimated value of the ohmic internal resistance in the k-th iterative calculation, and Ro,k-1 is the estimated value of the ohmic internal resistance in the previous, that is, the k-1th time.
步骤4、运用自适应扩展卡尔曼滤波算法估算电池的SOC,同时运用卡尔曼滤波算法估算电池的欧姆内阻,最终迭代计算实时获得锂电池的荷电状态SOC值。算法基本原理图如图2所示,按照该原理图,可以得到算法的执行流程,如图3所示。Step 4. Use the adaptive extended Kalman filter algorithm to estimate the SOC of the battery, and at the same time use the Kalman filter algorithm to estimate the ohmic internal resistance of the battery, and finally obtain the SOC value of the state of charge of the lithium battery in real time by iterative calculation. The basic schematic diagram of the algorithm is shown in Figure 2. According to the schematic diagram, the execution flow of the algorithm can be obtained, as shown in Figure 3.
步骤4具体按照以下步骤实施:Step 4 is implemented according to the following steps:
步骤4.1、设定锂电池荷电状态SOC和卡尔曼滤波算法中的状态误差协方差P的初值,选择系统噪声值为10-4,由SOC初值以及步骤2中的其他模型参数与SOC对应关系得到欧姆内阻的初值;Step 4.1. Set the lithium battery state of charge SOC and the initial value of the state error covariance P in the Kalman filter algorithm, select the system noise value of 10-4 , and determine the initial value of SOC and other model parameters in step 2 and SOC Correspondence to get the initial value of ohmic internal resistance;
步骤4.2、根据此时荷电状态SOC的估算结果,结合步骤2中的其它模型参数与SOC对应关系,得到等效电路模型中的电化学极化内阻RL与电容CL、浓度差极化电阻RS与电容CS的值;对于不在对应关系表内的荷电状态SOC值,采用左侧临近SOC对应的参数值代替;Step 4.2. According to the estimation result of the state of charge SOC at this time, combined with the corresponding relationship between other model parameters and SOC in step 2, obtain the electrochemical polarization internal resistanceRL and capacitanceCL and concentration difference in the equivalent circuit model. The value of the resistance RS and the capacitance CS ; for the state of charge SOC value that is not in the corresponding relationship table, the parameter value corresponding to the adjacent SOC on the left is used instead;
步骤4.3、由荷电状态SOC与欧姆内阻Ro各自的状态方程,分别迭代计算荷电状态SOC和欧姆内阻的状态预测值和误差协方差预测值;Step 4.3, from the respective state equations of the state of charge SOC and the ohmic internal resistance Ro , iteratively calculate the state predicted value and the error covariance predicted value of the state of charge SOC and the ohmic internal resistance respectively;
步骤4.4、计算荷电状态SOC和欧姆内阻的卡尔曼滤波增益P;Step 4.4, calculate the Kalman filter gain P of the state of charge SOC and the ohmic internal resistance;
步骤4.5、将荷电状态SOC和欧姆内阻的状态预测值代入观测方程得到观测量的预测值;Step 4.5: Substitute the state predicted values of the state of charge SOC and the ohmic internal resistance into the observation equation to obtain the predicted value of the observed amount;
步骤4.6、计算系统量测新息;Step 4.6, the computing system measures the innovation;
步骤4.7、由量测新息、荷电状态SOC和欧姆内阻各自的卡尔曼滤波增益得到当前时刻的状态估计量并更新误差协方差;Step 4.7, obtain the state estimator at the current moment and update the error covariance from the respective Kalman filter gains of the measured innovation, state of charge SOC and ohmic internal resistance;
步骤4.8、调整荷电状态SOC估算的过程噪声协方差;Step 4.8, adjust the process noise covariance of the state of charge SOC estimation;
步骤4.9、将步骤4.3得到的状态量、误差协方差和步骤4.4得到的增益P、步骤4.5得到的观测量预测值以及步骤4.6得到的新息代入步骤4.2中,得到锂电池荷电状态SOC的值,并开始新一轮的循环迭代。Step 4.9. Substitute the state quantity and error covariance obtained in step 4.3, the gain P obtained in step 4.4, the predicted value of the observed quantity obtained in step 4.5, and the innovation obtained in step 4.6 into step 4.2, and obtain the state of charge SOC of the lithium battery. value, and start a new round of loop iteration.
步骤4.3具体如下:Step 4.3 is as follows:
计算状态预测值式子为:The formula for calculating the state prediction value is:

其中,

计算误差协方差预测式子为:The prediction formula for calculating the error covariance is:
Pk/k-1=Fk-1Pk-1Fk-1T+QkPk/k-1 =Fk-1 Pk-1 Fk-1T +Qk
其中,Pk/k-1为当前时刻的状态预测值,Pk-1为前一时刻的状态量,Qk为当前时刻的过程噪声协方差,Fk-1由状态预测函数
步骤4.4具体如下:Step 4.4 is as follows:
计算卡尔曼滤波增益为:Calculate the Kalman filter gain as:
Kk=Pk/k-1GkT(GkPk/k-1GkT+R)-1Kk =Pk/k-1 GkT (Gk Pk/k-1 GkT +R)-1
其中,Pk/k-1为当前时刻的状态预测值,Kk为当前时刻的卡尔曼滤波增益,R为测量噪声协方差,Gk由观测函数对当前时刻的状态预测值求雅克比矩阵得到。Among them, Pk/k-1 is the state prediction value at the current moment, Kk is the Kalman filter gain at the current moment, R is the measurement noise covariance, and Gk is the Jacobian matrix calculated by the observation function for the state prediction value at the current moment. get.
步骤4.6具体如下:Step 4.6 is as follows:
计算系统量测新息:Computing system measurement innovation:
υj=yj-yj/j-1υj =yj -yj/j-1
其中,υj表示系统量测新息,yj表示前面某一时刻的系统量测值,yj/j-1表示前面某一时刻的系统量测的预测值,j表示某一历史时刻迭代计算步数。Among them, υj represents the system measurement innovation, yj represents the system measurement value at a previous moment, yj/j-1 represents the predicted value of the system measurement at a previous moment, and j represents the iteration at a certain historical moment. Count steps.
步骤4.7具体如下:Step 4.7 is as follows:
计算当前时刻的状态估计量:Compute the state estimator at the current moment:

其中,yk为当前时刻观测值,g为观测函数;Among them, yk is the observation value at the current moment, and g is the observation function;
更新误差协方差:Update the error covariance:
Pk=(E-KkGk)Pk/k-1Pk =(EKk Gk )Pk/k-1
其中,E代表单位矩阵,Pk/k-1为当前时刻的状态预测值,Kk为当前时刻的卡尔曼滤波增益,Gk由观测函数对当前时刻的状态预测值求雅克比矩阵得到。Among them, E represents the identity matrix, Pk/k-1 is the state prediction value at the current moment, Kk is the Kalman filter gain at the current moment, and Gk is obtained by calculating the Jacobian matrix of the state prediction value at the current moment by the observation function.
步骤4.8具体如下:Step 4.8 is as follows:
调整荷电状态SOC估算的过程噪声协方差:Adjust the process noise covariance for the state-of-charge SOC estimate:

Qk=KkSkKkTQk =Kk Sk KkT
其中,m表示统计量测新息历史信息的窗口宽度,Sk表示前m个量测新息的均值,υj表示系统量测新息,Kk为当前时刻的卡尔曼滤波增益,Qk为当前时刻的过程噪声协方差,k表示当前时刻迭代计算步数,j表示某一历史时刻计算步数。Among them, m represents the window width of the historical information of statistical measurement innovation, Sk represents the mean value of the first m measurement innovations, υj represents the system measurement innovation, Kk is the Kalman filter gain at the current moment, Qk is the process noise covariance at the current moment, k represents the number of iterative calculation steps at the current moment, and j represents the number of calculation steps at a certain historical moment.
为了验证本发明估算SOC的准确度,以某种标称容量为1.7Ah的磷酸铁锂电池为研究对象,进行模拟工况实验。模拟的工况为动态应力测试工况DST(dynamic stress test),其单周期的充放电电流如图4所示。模拟工况实验完成之后,分别用扩展卡尔曼滤波法和本发明提出的自适应双扩展卡尔曼滤波算法对SOC进行估算,得到SOC估算结果和误差如图5所示,可以明显看出两种方法都能在SOC初值不准的情况下收敛到真值,但是自适应双扩展卡尔曼滤波算法的准确度更高。In order to verify the accuracy of SOC estimation of the present invention, a certain lithium iron phosphate battery with a nominal capacity of 1.7Ah is taken as the research object, and a simulated working condition experiment is carried out. The simulated working condition is the dynamic stress test condition DST (dynamic stress test), and the single-cycle charge-discharge current is shown in Figure 4. After the simulation working condition experiment is completed, the SOC is estimated by the extended Kalman filter method and the adaptive double extended Kalman filter algorithm proposed by the present invention, and the SOC estimation results and errors are obtained as shown in Figure 5. It can be clearly seen that the two The methods can all converge to the true value when the initial value of SOC is inaccurate, but the accuracy of the adaptive double extended Kalman filter algorithm is higher.
Claims (10)
Translated fromChinese






Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911158088.9ACN111007400A (en) | 2019-11-22 | 2019-11-22 | Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911158088.9ACN111007400A (en) | 2019-11-22 | 2019-11-22 | Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111007400Atrue CN111007400A (en) | 2020-04-14 |
Family
ID=70112680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911158088.9APendingCN111007400A (en) | 2019-11-22 | 2019-11-22 | Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111007400A (en) |
Cited By (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110780204A (en)* | 2019-11-11 | 2020-02-11 | 北京理工大学 | A method for estimating SOC of electric vehicle battery pack |
| CN111551869A (en)* | 2020-05-15 | 2020-08-18 | 江苏科尚智能科技有限公司 | Method and device for measuring low-frequency parameters of lithium battery, computer equipment and storage medium |
| CN111668865A (en)* | 2020-07-21 | 2020-09-15 | 广东电网有限责任公司电力科学研究院 | Hierarchical control method and related device for echelon utilization energy storage system |
| CN111948560A (en)* | 2020-07-30 | 2020-11-17 | 西安工程大学 | Lithium battery state of health estimation method based on multi-factor evaluation model |
| CN111983472A (en)* | 2020-08-24 | 2020-11-24 | 哈尔滨理工大学 | Lithium ion power battery safety degree estimation method and estimation device based on adaptive Kalman filtering |
| CN111983471A (en)* | 2020-08-24 | 2020-11-24 | 哈尔滨理工大学 | Lithium ion power battery safety degree estimation method and estimation device based on double Kalman filtering |
| CN111999654A (en)* | 2020-08-04 | 2020-11-27 | 力高(山东)新能源技术有限公司 | Adaptive extended Kalman estimation SOC algorithm |
| CN112034349A (en)* | 2020-08-13 | 2020-12-04 | 南京邮电大学 | Lithium battery health state online estimation method |
| CN112213644A (en)* | 2020-09-30 | 2021-01-12 | 蜂巢能源科技有限公司 | Battery state of charge estimation method and battery management system |
| CN112578286A (en)* | 2020-11-23 | 2021-03-30 | 经纬恒润(天津)研究开发有限公司 | Battery SOC estimation method and device |
| CN112611972A (en)* | 2020-11-30 | 2021-04-06 | 上海理工大学 | Method for estimating SOC (state of charge) of lithium battery under condition of low-frequency sampling data |
| CN112684348A (en)* | 2021-01-21 | 2021-04-20 | 山东大学 | SOC prediction method and system based on strong tracking algorithm and adaptive Kalman filtering |
| CN112858928A (en)* | 2021-03-08 | 2021-05-28 | 安徽理工大学 | Lithium battery SOC estimation method based on online parameter identification |
| CN112964997A (en)* | 2021-01-21 | 2021-06-15 | 西南科技大学 | Unmanned aerial vehicle lithium ion battery peak power self-adaptive estimation method |
| CN113075568A (en)* | 2021-03-30 | 2021-07-06 | 上海交通大学 | Sodium ion battery state of charge estimation method and equipment based on current integral constraint |
| CN113093038A (en)* | 2021-03-03 | 2021-07-09 | 同济大学 | Power battery internal resistance composition analysis method based on pulse charge and discharge test |
| CN113156321A (en)* | 2021-04-26 | 2021-07-23 | 中国矿业大学 | Estimation method for state of charge (SOC) of lithium ion battery |
| CN113219344A (en)* | 2021-03-17 | 2021-08-06 | 国家计算机网络与信息安全管理中心 | Lead-acid storage battery SOC estimation method |
| CN113391212A (en)* | 2021-06-23 | 2021-09-14 | 山东大学 | Lithium ion battery equivalent circuit parameter online identification method and system |
| CN113447821A (en)* | 2021-06-30 | 2021-09-28 | 国网北京市电力公司 | Method for estimating state of charge of battery |
| CN113567864A (en)* | 2021-06-25 | 2021-10-29 | 南方电网电动汽车服务有限公司 | Method and device for determining state of charge of battery, computer equipment and storage medium |
| CN114236401A (en)* | 2021-12-20 | 2022-03-25 | 上海正泰电源系统有限公司 | A Battery State Estimation Method Based on Adaptive Particle Swarm Optimization |
| CN114295987A (en)* | 2021-12-30 | 2022-04-08 | 浙江大学 | A battery SOC state estimation method based on nonlinear Kalman filter |
| CN114415040A (en)* | 2021-12-24 | 2022-04-29 | 国网江苏省电力有限公司电力科学研究院 | Energy storage power station energy management method and device based on SOC real-time estimation |
| CN114676553A (en)* | 2022-02-14 | 2022-06-28 | 江苏大学 | SOC estimation method based on adaptive sliding mode variable structure optimization extended Kalman filtering |
| CN114779083A (en)* | 2022-03-28 | 2022-07-22 | 中国矿业大学 | Fusion method for improving lithium ion battery state of charge estimation robustness |
| CN114859256A (en)* | 2022-04-29 | 2022-08-05 | 上海瑞浦青创新能源有限公司 | Method and device for predicting remaining available energy of battery pack |
| CN114895192A (en)* | 2022-05-20 | 2022-08-12 | 上海玫克生储能科技有限公司 | Soc estimation method, system, medium and electronic device based on Kalman filtering |
| CN115097314A (en)* | 2022-07-07 | 2022-09-23 | 北京电满满科技有限公司 | Electric vehicle battery SOC precision correction method and system based on iterative method |
| CN115097309A (en)* | 2022-05-31 | 2022-09-23 | 风帆有限责任公司 | Online prediction method and device of battery SOC, electronic equipment and storage medium |
| CN115201687A (en)* | 2022-07-13 | 2022-10-18 | 西南交通大学 | Battery model parameter and SoC joint estimation method based on online broadband impedance |
| CN115201690A (en)* | 2022-07-22 | 2022-10-18 | 河北工业大学 | Lithium battery SOC estimation method based on resistance-capacitance parameter filtering and AUKF |
| JP2023030328A (en)* | 2021-08-23 | 2023-03-08 | 日立グローバルライフソリューションズ株式会社 | Battery state estimation method and battery state estimation device |
| CN112327183B (en)* | 2020-09-18 | 2023-11-28 | 国联汽车动力电池研究院有限责任公司 | Lithium ion battery SOC estimation method and device |
| CN117388715A (en)* | 2023-12-11 | 2024-01-12 | 西南交通大学 | A joint estimation method of SOC and SOP for series lithium battery packs |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107219466A (en)* | 2017-06-12 | 2017-09-29 | 福建工程学院 | A kind of lithium battery SOC estimation method for mixing EKF |
| US20180246173A1 (en)* | 2017-02-28 | 2018-08-30 | Honeywell International Inc. | Online determination of model parameters of lead acid batteries and computation of soc and soh |
| CN108594135A (en)* | 2018-06-28 | 2018-09-28 | 南京理工大学 | A kind of SOC estimation method for the control of lithium battery balance charge/discharge |
| CN109061496A (en)* | 2018-08-10 | 2018-12-21 | 安徽力高新能源技术有限公司 | A method of lithium battery SOC is estimated using expanded Kalman filtration algorithm |
| CN110058160A (en)* | 2019-04-29 | 2019-07-26 | 西安理工大学 | The prediction technique of lithium battery health status based on SREKF |
| CN110395141A (en)* | 2019-06-27 | 2019-11-01 | 武汉理工大学 | SOC estimation method for power lithium battery based on adaptive Kalman filter method |
- 2019
- 2019-11-22CNCN201911158088.9Apatent/CN111007400A/enactivePending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180246173A1 (en)* | 2017-02-28 | 2018-08-30 | Honeywell International Inc. | Online determination of model parameters of lead acid batteries and computation of soc and soh |
| CN107219466A (en)* | 2017-06-12 | 2017-09-29 | 福建工程学院 | A kind of lithium battery SOC estimation method for mixing EKF |
| CN108594135A (en)* | 2018-06-28 | 2018-09-28 | 南京理工大学 | A kind of SOC estimation method for the control of lithium battery balance charge/discharge |
| CN109061496A (en)* | 2018-08-10 | 2018-12-21 | 安徽力高新能源技术有限公司 | A method of lithium battery SOC is estimated using expanded Kalman filtration algorithm |
| CN110058160A (en)* | 2019-04-29 | 2019-07-26 | 西安理工大学 | The prediction technique of lithium battery health status based on SREKF |
| CN110395141A (en)* | 2019-06-27 | 2019-11-01 | 武汉理工大学 | SOC estimation method for power lithium battery based on adaptive Kalman filter method |
Non-Patent Citations (6)
| Title |
|---|
| XIN LEI LIU ETC.: "SOC calculation method based on extended Kalman filter of power battery for electric vehicle", 《2017 12TH INTERNATIONAL CONFERENCE ON INTELLIGENT SYSTEMS AND KNOWLEDGE ENGINEERING (ISKE)》* |
| 刘国繁等: "一种MH/Ni动力电池模型及其SOC预测方法", 《电源技术》* |
| 华显等: "基于双扩展卡尔曼滤波的电池荷电状态估计", 《测控技术》* |
| 李华等: "基于自适应卡尔曼滤波器的锂电池SOC估计策略", 《太原科技大学学报》* |
| 颜湘武等: "基于自适应无迹卡尔曼滤波的动力电池健康状态检测及梯次利用研究", 《电工技术学报》* |
| 齐慧颖: "《医学信息资源智能管理》", 31 July 2019* |
Cited By (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110780204A (en)* | 2019-11-11 | 2020-02-11 | 北京理工大学 | A method for estimating SOC of electric vehicle battery pack |
| CN111551869A (en)* | 2020-05-15 | 2020-08-18 | 江苏科尚智能科技有限公司 | Method and device for measuring low-frequency parameters of lithium battery, computer equipment and storage medium |
| CN111668865A (en)* | 2020-07-21 | 2020-09-15 | 广东电网有限责任公司电力科学研究院 | Hierarchical control method and related device for echelon utilization energy storage system |
| CN111668865B (en)* | 2020-07-21 | 2021-09-03 | 广东电网有限责任公司电力科学研究院 | Hierarchical control method and related device for echelon utilization energy storage system |
| CN111948560A (en)* | 2020-07-30 | 2020-11-17 | 西安工程大学 | Lithium battery state of health estimation method based on multi-factor evaluation model |
| CN111999654B (en)* | 2020-08-04 | 2023-05-12 | 力高(山东)新能源技术股份有限公司 | Self-adaptive extended Kalman estimation SOC algorithm |
| CN111999654A (en)* | 2020-08-04 | 2020-11-27 | 力高(山东)新能源技术有限公司 | Adaptive extended Kalman estimation SOC algorithm |
| CN112034349A (en)* | 2020-08-13 | 2020-12-04 | 南京邮电大学 | Lithium battery health state online estimation method |
| CN111983472A (en)* | 2020-08-24 | 2020-11-24 | 哈尔滨理工大学 | Lithium ion power battery safety degree estimation method and estimation device based on adaptive Kalman filtering |
| CN111983471B (en)* | 2020-08-24 | 2022-11-22 | 哈尔滨理工大学 | A method and device for estimating the safety degree of lithium-ion power batteries based on double Kalman filters |
| CN111983472B (en)* | 2020-08-24 | 2022-11-25 | 哈尔滨理工大学 | Lithium ion power battery safety degree estimation method and estimation device based on adaptive Kalman filtering |
| CN111983471A (en)* | 2020-08-24 | 2020-11-24 | 哈尔滨理工大学 | Lithium ion power battery safety degree estimation method and estimation device based on double Kalman filtering |
| CN112327183B (en)* | 2020-09-18 | 2023-11-28 | 国联汽车动力电池研究院有限责任公司 | Lithium ion battery SOC estimation method and device |
| CN112213644A (en)* | 2020-09-30 | 2021-01-12 | 蜂巢能源科技有限公司 | Battery state of charge estimation method and battery management system |
| CN112213644B (en)* | 2020-09-30 | 2023-05-16 | 蜂巢能源科技有限公司 | Battery state of charge estimation method and battery management system |
| CN112578286A (en)* | 2020-11-23 | 2021-03-30 | 经纬恒润(天津)研究开发有限公司 | Battery SOC estimation method and device |
| CN112611972A (en)* | 2020-11-30 | 2021-04-06 | 上海理工大学 | Method for estimating SOC (state of charge) of lithium battery under condition of low-frequency sampling data |
| CN112964997A (en)* | 2021-01-21 | 2021-06-15 | 西南科技大学 | Unmanned aerial vehicle lithium ion battery peak power self-adaptive estimation method |
| CN112684348A (en)* | 2021-01-21 | 2021-04-20 | 山东大学 | SOC prediction method and system based on strong tracking algorithm and adaptive Kalman filtering |
| CN112964997B (en)* | 2021-01-21 | 2022-03-29 | 西南科技大学 | An adaptive estimation method for peak power of UAV lithium-ion battery |
| CN113093038A (en)* | 2021-03-03 | 2021-07-09 | 同济大学 | Power battery internal resistance composition analysis method based on pulse charge and discharge test |
| CN113093038B (en)* | 2021-03-03 | 2022-08-05 | 同济大学 | An analysis method of internal resistance composition of power battery based on pulse charge and discharge test |
| CN112858928A (en)* | 2021-03-08 | 2021-05-28 | 安徽理工大学 | Lithium battery SOC estimation method based on online parameter identification |
| CN112858928B (en)* | 2021-03-08 | 2024-02-06 | 安徽理工大学 | Lithium battery SOC estimation method based on online parameter identification |
| CN113219344A (en)* | 2021-03-17 | 2021-08-06 | 国家计算机网络与信息安全管理中心 | Lead-acid storage battery SOC estimation method |
| CN113075568B (en)* | 2021-03-30 | 2022-06-24 | 上海交通大学 | State-of-charge estimation method and device for sodium-ion batteries based on current integral constraints |
| CN113075568A (en)* | 2021-03-30 | 2021-07-06 | 上海交通大学 | Sodium ion battery state of charge estimation method and equipment based on current integral constraint |
| CN113156321A (en)* | 2021-04-26 | 2021-07-23 | 中国矿业大学 | Estimation method for state of charge (SOC) of lithium ion battery |
| CN113391212B (en)* | 2021-06-23 | 2022-05-17 | 山东大学 | Lithium ion battery equivalent circuit parameter online identification method and system |
| CN113391212A (en)* | 2021-06-23 | 2021-09-14 | 山东大学 | Lithium ion battery equivalent circuit parameter online identification method and system |
| CN113567864A (en)* | 2021-06-25 | 2021-10-29 | 南方电网电动汽车服务有限公司 | Method and device for determining state of charge of battery, computer equipment and storage medium |
| CN113447821A (en)* | 2021-06-30 | 2021-09-28 | 国网北京市电力公司 | Method for estimating state of charge of battery |
| JP7705756B2 (en) | 2021-08-23 | 2025-07-10 | 日立グローバルライフソリューションズ株式会社 | BATTERY STATE ESTIMATION METHOD AND BATTERY STATE ESTIMATION DEVICE |
| JP2023030328A (en)* | 2021-08-23 | 2023-03-08 | 日立グローバルライフソリューションズ株式会社 | Battery state estimation method and battery state estimation device |
| CN114236401B (en)* | 2021-12-20 | 2023-11-28 | 上海正泰电源系统有限公司 | Battery state estimation method based on self-adaptive particle swarm algorithm |
| CN114236401A (en)* | 2021-12-20 | 2022-03-25 | 上海正泰电源系统有限公司 | A Battery State Estimation Method Based on Adaptive Particle Swarm Optimization |
| CN114415040A (en)* | 2021-12-24 | 2022-04-29 | 国网江苏省电力有限公司电力科学研究院 | Energy storage power station energy management method and device based on SOC real-time estimation |
| CN114295987A (en)* | 2021-12-30 | 2022-04-08 | 浙江大学 | A battery SOC state estimation method based on nonlinear Kalman filter |
| CN114295987B (en)* | 2021-12-30 | 2024-04-02 | 浙江大学 | A battery SOC state estimation method based on nonlinear Kalman filtering |
| CN114676553A (en)* | 2022-02-14 | 2022-06-28 | 江苏大学 | SOC estimation method based on adaptive sliding mode variable structure optimization extended Kalman filtering |
| CN114779083A (en)* | 2022-03-28 | 2022-07-22 | 中国矿业大学 | Fusion method for improving lithium ion battery state of charge estimation robustness |
| CN114859256A (en)* | 2022-04-29 | 2022-08-05 | 上海瑞浦青创新能源有限公司 | Method and device for predicting remaining available energy of battery pack |
| CN114895192A (en)* | 2022-05-20 | 2022-08-12 | 上海玫克生储能科技有限公司 | Soc estimation method, system, medium and electronic device based on Kalman filtering |
| CN115097309A (en)* | 2022-05-31 | 2022-09-23 | 风帆有限责任公司 | Online prediction method and device of battery SOC, electronic equipment and storage medium |
| CN115097314A (en)* | 2022-07-07 | 2022-09-23 | 北京电满满科技有限公司 | Electric vehicle battery SOC precision correction method and system based on iterative method |
| CN115097314B (en)* | 2022-07-07 | 2025-04-18 | 北京电满满科技有限公司 | A method and system for correcting SOC accuracy of electric vehicle battery based on iteration method |
| CN115201687B (en)* | 2022-07-13 | 2023-08-29 | 西南交通大学 | Battery model parameter and SoC joint estimation method based on-line broadband impedance |
| CN115201687A (en)* | 2022-07-13 | 2022-10-18 | 西南交通大学 | Battery model parameter and SoC joint estimation method based on online broadband impedance |
| CN115201690B (en)* | 2022-07-22 | 2025-06-13 | 河北工业大学 | A lithium battery SOC estimation method based on RC parameter filtering and AUKF |
| CN115201690A (en)* | 2022-07-22 | 2022-10-18 | 河北工业大学 | Lithium battery SOC estimation method based on resistance-capacitance parameter filtering and AUKF |
| CN117388715A (en)* | 2023-12-11 | 2024-01-12 | 西南交通大学 | A joint estimation method of SOC and SOP for series lithium battery packs |
| CN117388715B (en)* | 2023-12-11 | 2024-02-27 | 西南交通大学 | A joint estimation method of SOC and SOP for series lithium battery packs |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111007400A (en) | Lithium battery SOC estimation method based on self-adaptive double-extended Kalman filtering method | |
| CN106918789B (en) | A kind of SOC-SOH combines online real-time estimation and on-line amending method | |
| CN106909716B (en) | Lithium iron phosphate battery modeling and SOC estimation method considering capacity loss | |
| CN111948560A (en) | Lithium battery state of health estimation method based on multi-factor evaluation model | |
| CN110261779A (en) | A kind of ternary lithium battery charge state cooperates with estimation method with health status online | |
| CN110554324B (en) | SOC and SOH joint estimation method | |
| CN113777510A (en) | Method and device for estimating state of charge of lithium battery | |
| CN112327182B (en) | An Adaptive H-infinity Filter SOC Estimation Method Based on Measured Value Residual Sequence | |
| CN111581904A (en) | Lithium battery SOC and SOH collaborative estimation method considering influence of cycle number | |
| CN114035072A (en) | Battery pack multi-state joint estimation method based on cloud edge cooperation | |
| CN114740385B (en) | An adaptive method for estimating state of charge of lithium-ion batteries | |
| CN108490356A (en) | A kind of lithium battery SOC estimation method for improving EKF algorithms | |
| CN111190109B (en) | A method for estimating state of charge of lithium battery without current sensor | |
| CN107589379A (en) | A kind of On-line Estimation lithium battery SOC and the method for impedance | |
| CN106019164A (en) | Lithium battery SOC estimation algorithm based on dual adaptive unscented Kalman filter | |
| CN107037374A (en) | A kind of SOC and SOH combined estimation methods of lithium ion battery | |
| CN106093783A (en) | The battery SOC method of estimation that Kalman filtering merges with data-driven | |
| CN114660464A (en) | A method for estimating the state of charge of a lithium-ion battery | |
| CN110082684A (en) | A kind of lithium battery SOC estimation method based on the more new breath Extended Kalman filter of weighting | |
| CN111426957A (en) | SOC estimation optimization method for power battery under simulated vehicle working condition | |
| CN110058160A (en) | The prediction technique of lithium battery health status based on SREKF | |
| CN109752660B (en) | Battery state of charge estimation method without current sensor | |
| CN114814591B (en) | A lithium battery SOE estimation method, device and system | |
| CN111142025A (en) | Battery SOC estimation method and device, storage medium and electric vehicle | |
| CN105699910A (en) | Method for on-line estimating residual electric quantity of lithium battery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication | Application publication date:20200414 |