CN110888110A - Indoor carrier phase positioning model construction method suitable for WiFi - Google Patents
Indoor carrier phase positioning model construction method suitable for WiFiDownload PDFInfo
- Publication number
- CN110888110A CN110888110ACN201911220031.7ACN201911220031ACN110888110ACN 110888110 ACN110888110 ACN 110888110ACN 201911220031 ACN201911220031 ACN 201911220031ACN 110888110 ACN110888110 ACN 110888110A
- Authority
- CN
- China
- Prior art keywords
- phase
- carrier phase
- receiver
- carrier
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000010276constructionMethods0.000titleabstractdescription7
- 238000000034methodMethods0.000claimsabstractdescription33
- 238000004422calculation algorithmMethods0.000claimsabstractdescription8
- 239000011159matrix materialSubstances0.000claimsdescription8
- 238000005070samplingMethods0.000claimsdescription4
- 230000004807localizationEffects0.000claimsdescription3
- 238000012545processingMethods0.000claimsdescription3
- 238000004364calculation methodMethods0.000claimsdescription2
- 238000000605extractionMethods0.000claimsdescription2
- 238000007781pre-processingMethods0.000claimsdescription2
- 238000007619statistical methodMethods0.000claimsdescription2
- 238000005259measurementMethods0.000abstractdescription3
- 238000005516engineering processMethods0.000description5
- 238000011161developmentMethods0.000description2
- 238000010295mobile communicationMethods0.000description2
- 230000009286beneficial effectEffects0.000description1
- 239000000969carrierSubstances0.000description1
- 238000012937correctionMethods0.000description1
- 230000008878couplingEffects0.000description1
- 238000010168coupling processMethods0.000description1
- 238000005859coupling reactionMethods0.000description1
- 238000010586diagramMethods0.000description1
- 230000007613environmental effectEffects0.000description1
- 238000009434installationMethods0.000description1
- 238000004519manufacturing processMethods0.000description1
- 239000000463materialSubstances0.000description1
- 238000012544monitoring processMethods0.000description1
- 238000011160researchMethods0.000description1
Images

Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0257—Hybrid positioning
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于室内定位技术,一种适用于WiFi的室内载波相位定位模型构建方法。The invention belongs to indoor positioning technology, and is an indoor carrier phase positioning model construction method suitable for WiFi.
背景技术Background technique
近年来,基于位置信息的服务与人们的生活密切相关,如共享单车、手机打车服务、外卖服务、快递信息监控、老人与儿童智能关爱等。基于位置的应用快速发展,人们对定位技术的精度和可靠性需求也越来越高。同时,高精度定位服务在国家安全、经济发展和社会民生等领域,都发挥着重要作用。基于卫星的室外定位技术能够达到厘米级定位精度,基于移动通信网络的室外定位技术能够达到几十米定位精度,在精准农业、智能交通、物联网等领域发挥了重要作用。室内环境是人们活动最密集的区域,与人们的生产生活密切相关,因此室内位置信息在许多应用中发挥着重要作用,如博物馆、仓库资产管理、智慧医疗和智慧城市等。由于卫星信号很难穿透建筑物,且基于移动通信网络的定位精度无法满足室内用户的需求,因此,室内高精度定位技术已经成为研究热点和难点之一。In recent years, services based on location information have been closely related to people's lives, such as shared bicycles, mobile taxi services, takeaway services, express information monitoring, and intelligent care for the elderly and children. With the rapid development of location-based applications, people have higher and higher demands on the accuracy and reliability of positioning technology. At the same time, high-precision positioning services play an important role in the fields of national security, economic development, and social and people's livelihood. Satellite-based outdoor positioning technology can achieve centimeter-level positioning accuracy, and mobile communication network-based outdoor positioning technology can achieve positioning accuracy of tens of meters, playing an important role in precision agriculture, intelligent transportation, and the Internet of Things. The indoor environment is the most densely populated area and is closely related to people's production and life. Therefore, indoor location information plays an important role in many applications, such as museums, warehouse asset management, smart medical care, and smart cities. Since it is difficult for satellite signals to penetrate buildings, and the positioning accuracy based on mobile communication networks cannot meet the needs of indoor users, indoor high-precision positioning technology has become one of the research hotspots and difficulties.
目前,WiFi网络在生活中非常普及,因此可以利用现有的WiFi网络来提供室内定位服务。对于定位,定位参数在一定程度上决定着最终的定位精度,常用的定位参数主要有:接收信号强度(Received Signal Strength,RSS)、到达角(Angle of Arrival,AOA)以及飞行时间(Time of Flight,TOF)。RSS是一种粗粒度的定位参数,因此基于RSS的定位精度较低,一般在2-4米左右。基于RSS的定位方法主要有:一、基于传播模型测距的三边定位法;二、基于指纹的定位方法。对于第一种方法,需要在离线阶段训练传播模型,而传播模型主要依赖于衰减因子。因此,衰减因子的精确程度影响到最终测距的结果。由于室内的多径传播及环境变化,训练出的衰减因子往往精度较差。相比较而言,基于指纹的定位方法能够提供更高的定位精度。但是指纹数据库的构建需要花费大量的人力物力,当环境发生变化时需要对指纹库进行更新。相比于RSS,AOA和TOF是两种几何参数,因此能够获得较高的定位精度。基于AOA定位是通过测量目标与多个接收机之间的角度,然后利用三边定位法求解出目标的位置。对于AOA的估计通常需要使用阵列天线,为了抑制多径信号的干扰,阵列中天线的数量往往要求大于路径的个数。然而,射频通道的校正、天线耦合、多径干扰以及安装标定都限制了AOA定位方法的应用。基于TOF的定位法是通过测量目标到多个接收机的传播时延,因此要求收发之间要进行严格的时钟同步,否则会引入许多相位误差。除了时钟同步,信号带宽也决定着多径在TOF上的分辨率。例如,对20M和40M带宽的WiFi信号而言,TOF的分辨率仅为为15m和7.5m。到达时间差(Time Difference of Arrival,TDOA)是在另外一种时间观测测量值,该方法要求接收机之间进行严格的时钟同步。由于WiFi能够提供丰富的信道状态信息(Channel State Information,CSI),其包含的载波相位信息分辨力高,因此载波相位定位模型具有现实意义。但是,单一载波相位信息定位不准确,因此需要结合TOA(Time of Arrival)信息构建联合定位模型。At present, WiFi networks are very popular in daily life, so the existing WiFi networks can be used to provide indoor positioning services. For positioning, positioning parameters determine the final positioning accuracy to a certain extent. Common positioning parameters mainly include: Received Signal Strength (RSS), Angle of Arrival (AOA), and Time of Flight (Time of Flight). , TOF). RSS is a coarse-grained positioning parameter, so the positioning accuracy based on RSS is low, generally around 2-4 meters. The RSS-based positioning methods mainly include: first, the three-sided positioning method based on propagation model ranging; second, the fingerprint-based positioning method. For the first method, the propagation model needs to be trained in the offline stage, and the propagation model mainly depends on the decay factor. Therefore, the precision of the attenuation factor affects the final ranging result. Due to indoor multipath propagation and environmental changes, the trained attenuation factors are often less accurate. In comparison, fingerprint-based localization methods can provide higher localization accuracy. However, the construction of the fingerprint database requires a lot of manpower and material resources, and the fingerprint database needs to be updated when the environment changes. Compared with RSS, AOA and TOF are two geometric parameters, so higher positioning accuracy can be obtained. Positioning based on AOA is to measure the angle between the target and multiple receivers, and then use the trilateration method to solve the position of the target. Array antennas are usually required for the estimation of AOA. In order to suppress the interference of multipath signals, the number of antennas in the array is often required to be greater than the number of paths. However, RF channel calibration, antenna coupling, multipath interference, and installation calibration all limit the application of AOA positioning methods. The TOF-based positioning method measures the propagation delay from the target to multiple receivers, so strict clock synchronization is required between transceivers, otherwise many phase errors will be introduced. In addition to clock synchronization, signal bandwidth also determines the resolution of multipath on TOF. For example, for 20M and 40M bandwidth WiFi signals, the TOF resolution is only 15m and 7.5m. Time Difference of Arrival (TDOA) is a measurement observed at another time that requires strict clock synchronization between receivers. Since WiFi can provide abundant Channel State Information (CSI), and the carrier phase information contained in it has high resolution, the carrier phase positioning model has practical significance. However, the positioning of single carrier phase information is not accurate, so it is necessary to combine TOA (Time of Arrival) information to build a joint positioning model.
本发明提出一种适用于WiFi的室内载波相位定位模型构建方法,该模型利用直达信号的载波相位信息和TOA信息对目标进行定位。相比现有基于距离的定位方法,利用载波相位可以提高观测数据的分辨力,实现对目标的高精度定位。首先,提取CSI信息并进行预处理,获取较为稳定的载波相位观测值;然后,利用二维MUSIC(Multiple SignalClassification)算法,建立基于WiFi的目标信号超分辨参数估计模型,提取TOA构建伪距观测值;接着,基于定位接收机获得直达径的伪距和载波相位观测值,构建载波相位测距方程;最后,基于多个定位接收机,利用载波相位测距方程构造TDOA差分定位模型。该发明方法有效地构建了载波相位定位模型,为载波相位精确定位提供模型依据。The invention proposes an indoor carrier phase positioning model construction method suitable for WiFi, the model uses the carrier phase information and TOA information of the direct signal to locate the target. Compared with the existing distance-based positioning methods, the use of carrier phase can improve the resolution of observation data and achieve high-precision positioning of the target. First, CSI information is extracted and preprocessed to obtain relatively stable carrier phase observations; then, a two-dimensional MUSIC (Multiple Signal Classification) algorithm is used to establish a WiFi-based target signal super-resolution parameter estimation model, and TOA is extracted to construct pseudorange observations. ; Next, the pseudorange and carrier phase observations of the direct path are obtained based on the positioning receiver, and the carrier phase ranging equation is constructed. Finally, based on multiple positioning receivers, the TDOA differential positioning model is constructed by using the carrier phase ranging equation. The inventive method effectively constructs a carrier phase positioning model, and provides a model basis for accurate carrier phase positioning.
发明内容SUMMARY OF THE INVENTION
本发明的目的是提供一种适用于WiFi的室内载波相位定位模型构建方法,它能有效地利用载波相位对目标进行定位。The purpose of the present invention is to provide an indoor carrier phase positioning model construction method suitable for WiFi, which can effectively use the carrier phase to locate the target.
本发明所述的适用于WiFi的室内载波相位定位模型构建方法,包括以下步骤:The method for constructing an indoor carrier phase positioning model suitable for WiFi according to the present invention includes the following steps:
步骤一、提取CSI信息并进行预处理,获取较为稳定的载波相位观测值;Step 1: Extract CSI information and perform preprocessing to obtain relatively stable carrier phase observations;
步骤二、利用二维MUSIC算法,建立基于WiFi的目标信号超分辨参数估计模型,提取TOA构建伪距观测值。Step 2: Using the two-dimensional MUSIC algorithm, a WiFi-based target signal super-resolution parameter estimation model is established, and TOA is extracted to construct pseudorange observations.
步骤三、基于定位接收机获得直达径的伪距和载波相位观测值,构建载波相位测距方程;Step 3, based on the positioning receiver to obtain the pseudorange and carrier phase observations of the direct path, and construct the carrier phase ranging equation;
步骤四、基于多个定位接收机,利用载波相位测距方程构造TDOA差分定位模型。Step 4: Construct a TDOA differential positioning model by using carrier phase ranging equations based on multiple positioning receivers.
有益效果beneficial effect
本发明是一种适用于WiFi的室内载波相位定位模型构建方法,有以下优点:The present invention is an indoor carrier phase positioning model construction method suitable for WiFi, and has the following advantages:
1.基于载波相位的测距分辨力取决于观测量,其测距分辨力为载波波长,对于L波段及其以上的信号,其分辨力优于30cm,相比传统的定位参数,分辨力显著提高。1. The ranging resolution based on carrier phase depends on the amount of observation, and its ranging resolution is the carrier wavelength. For signals in the L-band and above, the resolution is better than 30cm. Compared with the traditional positioning parameters, the resolution is significant. improve.
2.利用TDOA差分原理消除钟差对定位的影响,该方法可以应用在现有的商用无线局域网以及移动网络当中;2. Use the TDOA differential principle to eliminate the influence of clock error on positioning, and this method can be applied to existing commercial wireless local area networks and mobile networks;
3.有效地构建了载波相位定位模型,为载波相位精确定位提供模型依据。3. The carrier phase positioning model is effectively constructed, which provides the model basis for the precise positioning of the carrier phase.
附图说明Description of drawings
图1为本发明的流程图;Fig. 1 is the flow chart of the present invention;
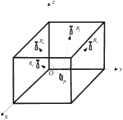
图2为室内场景示意图。Figure 2 is a schematic diagram of an indoor scene.
具体实施方案specific implementation
下面结合附图对本发明作进一步详细说明:Below in conjunction with accompanying drawing, the present invention is described in further detail:
图1为本发明流程图,步骤如下:Fig. 1 is the flow chart of the present invention, and the steps are as follows:
步骤一、在室内环境下假设房间大小为L×W×Am3,如图2所示,其中L为房间长度,W为房间宽度,A为房间高度。利用i(i=1,2,…,n)个接收机定位,每个接收机采用由N(N>3)个阵元组成的均匀线性阵列,信号采用正交频分复用(Orthogonal Frequency DivisionMultiplexing,OFDM)调制方式,子载波数量为M个。WiFi输出各个子载波的CSI信息,其对应载波相位值,从中选取30个子载波。Step 1. In the indoor environment, assume that the room size is L×W×Am3 , as shown in Figure 2, where L is the length of the room, W is the width of the room, and A is the height of the room. Using i (i=1,2,...,n) receivers for positioning, each receiver uses a uniform linear array composed of N (N>3) array elements, and the signal uses Orthogonal Frequency Division Multiplexing (Orthogonal Frequency Division Multiplexing). Division Multiplexing, OFDM) modulation mode, the number of sub-carriers is M. WiFi outputs the CSI information of each subcarrier, which corresponds to the carrier phase value, from which 30 subcarriers are selected.
由于信号采样以及硬件会带来线性误差,因此需要对相位进行校正。由OFDM调制方式可知,中心频点子载波不受线性误差影响。由于中心频点子载波的相位传输直流信号,无法直接得到其相位。为了获得中心频点子载波的相位,首先对子载波的CSI相位进行解卷绕,然后利用三次样条插值得到信号中心频点子载波的相位值,即载波相位。Phase correction is required due to linearity errors introduced by signal sampling and hardware. It can be known from the OFDM modulation method that the center frequency sub-carrier is not affected by the linear error. Since the phase of the sub-carrier at the center frequency transmits a DC signal, its phase cannot be directly obtained. In order to obtain the phase of the sub-carrier at the center frequency, the CSI phase of the sub-carrier is first unwrapped, and then the phase value of the sub-carrier at the center frequency of the signal is obtained by cubic spline interpolation, that is, the carrier phase.
为了提高相位的提取精度,可以通过测量多组数据进行统计分析得到更加准确的相位值。首先,为了消除CSI相位周期性的影响,对中心频点子载波的相位进行补偿处理:计算所有数据包的相位均值



其中,φn为目标到接收机n的载波相位观测值,
步骤二、对于任意一个接收机,信道频率响应(Channel Frequency Response,CFR)可以表示为:Step 2. For any receiver, the Channel Frequency Response (CFR) can be expressed as:

其中,γl和τl分别表示第l条路径的衰减和TOF,L为路径的个数,f为载波频率。对CFR进行离散采样就可以得到全部子载波的CSI矩阵,其可以表示为:Among them, γl and τl represent the attenuation and TOF of the lth path, L is the number of paths, and f is the carrier frequency. The CSI matrix of all subcarriers can be obtained by discretely sampling the CFR, which can be expressed as:
H=[h1,1,…,h1,M,…,hN,1,…,hN,M]T (3)H=[h1,1 ,...,h1,M ,...,hN,1 ,...,hN,M ]T (3)
建立角度和时延估计模型,H又可以表示为:To establish the angle and time delay estimation model, H can be expressed as:
H=Z(θ,τ)S(γ)+N (4)H=Z(θ, τ)S(γ)+N (4)
其中,S(γ)是L×1衰减向量,N是NM×1的噪声矢量。Z(θ,τ)是NM×L的方向矩阵,其可以表示为:where S(γ) is the L×1 attenuation vector, and N is the NM×1 noise vector. Z(θ, τ) is an NM×L orientation matrix, which can be expressed as:

其中,
a(θ)=[a1(θ),…,aN(θ)]T (6)a(θ)=[a1 (θ),...,aN (θ)]T (6)
b(τ)=[b1(τ),…,bM(τ)]T (7)b(τ)=[b1 (τ),...,bM (τ)]T (7)
其中,an(θ)=e-j2πf(n-1)dsinθ/c为a(θ)中第n个元素,θ为路径的AOA,d是天线之间的间距为半波长,c为电磁波在真空中的传播速度。bm(τ)=e-j2πΔf(m-1)τ为b(τ)中第m个元素,Δf为子载波频率间隔。对式(4)利用二维MUSIC算法,可以联合估计多径信号的AOA和TOF。进一步,分离出直达路径的伪距观测值:Where, an (θ)=e-j2πf(n-1)dsinθ/cis the nth element in a(θ), θ is the AOA of the path, d is the half-wavelength spacing between the antennas, and c is the electromagnetic wave Propagation speed in a vacuum. bm (τ)=e-j2πΔf(m-1)τ is the mth element in b(τ), and Δf is the subcarrier frequency interval. Using the two-dimensional MUSIC algorithm for equation (4), the AOA and TOF of the multipath signal can be jointly estimated. Further, separate out the pseudorange observations of the direct path:
ρn=τn·c (8)ρn =τn ·c (8)
其中,ρn为目标到接收机n的伪距观测值,τn为目标到接收机的直达径时延,c为电磁波在真空中的传播速度。Among them, ρn is the pseudorange observation value from the target to the receiver n, τn is the direct path delay from the target to the receiver, and c is the propagation speed of the electromagnetic wave in the vacuum.
步骤三、基于直达径的载波相位测量值,载波相位测距方程表示为:Step 3. Based on the measured value of the carrier phase of the direct path, the carrier phase ranging equation is expressed as:

其中,λ为载波的波长,Nn为目标和接收机n的载波相位整数部分,
利用直达路径的到达时间TOA对发射机到接收机进行距离粗估计,距离表示为:Using the time of arrival TOA of the direct path to roughly estimate the distance from the transmitter to the receiver, the distance is expressed as:

其中,rn为目标到接收机的欧式距离,δt为目标的时钟误差,δtn为接收机n的时钟误差,
步骤四、如图2所示,为了直观表示在房间内建立三维坐标系。目标、接收机位置分别用P、Rn来标记,目标的坐标为P=[x,y,z],接收机坐标表示为Ri=[xi,yi,zi],i=1,2,…,n。由式(9)和(10)构造载波相位定位模型:Step 4: As shown in Figure 2, a three-dimensional coordinate system is established in the room for intuitive representation. The target and receiver positions are marked with P and Rn respectively, the coordinates of the target are P=[x,y,z], and the coordinates of the receiver are expressed as Ri =[xi ,yi ,zi ], i=1 ,2,…,n. The carrier phase positioning model is constructed by equations (9) and (10):

将式(11)采用TDOA差分方式消除时钟误差:Equation (11) is used to eliminate the clock error by TDOA differential method:

由于接收机之间严格的时钟同步,式(12)可以简写为:Due to the strict clock synchronization between receivers, equation (12) can be abbreviated as:

其中,
采用基于牛顿迭代的最小二乘法求解方程组(13),可以将求解过程分为以下几步:Using the least square method based on Newton iteration to solve the equation system (13), the solving process can be divided into the following steps:
4a、准备数据与初始解。对于所有的接收机Rn,测量得到接收机n到目标的伪距ρn和载波相位φn。在开始牛顿迭代前,给出当前目标位置的初始估计值X0=[0,0,0]与差分整周模糊度的初值ΔNi,1=0(i=1,2,…,n)。4a. Prepare data and initial solution. For all receivers Rn , the pseudorange ρn from receiver n to the target and the carrier phase φn are measured. Before starting the Newton iteration, the initial estimated value of the current target position X0 =[0,0,0] and the initial value of the differential integer ambiguity ΔNi,1 =0(i=1,2,...,n ).
4b、非线性方程组线性化。假设k为当前求解过程中正在进行的牛顿迭代次数,则k-1是在当前求解已经完成的迭代次数。将式(13)在上一次迭代解Xk-1=[xk-1,yk-1,zk-1]处线性化,并忽略观测误差:4b. Linearization of nonlinear equations. Assuming that k is the number of Newton iterations in progress in the current solution process, then k-1 is the number of iterations that have been completed in the current solution process. Linearize equation (13) at the last iterative solution Xk-1 = [xk-1 , yk-1 , zk-1 ] and ignore the observation error:

其中,in,



Δxk,k-1=xk-xk-1Δxk,k-1 =xk -xk-1
Δyk,k-1=yk-yk-1Δyk,k-1 =yk -yk-1
Δzk,k-1=zk-zk-1Δzk,k-1 =zk -zk-1
ΔNn,1=Nn-N1ΔNn,1 =Nn -N1
将式(14)简写为:Equation (14) can be abbreviated as:

其中,in,

ΔX=[Δxk,k-1 Δyk,k-1 Δzk,k-1]TΔX=[Δxk,k-1 Δyk,k-1 Δzk,k-1 ]T
ΔN=[ΔN2,1 ΔN3,1 … ΔNn,1]TΔN=[ΔN2,1 ΔN3,1 … ΔNn,1 ]T

4c、求解线性方程组。利用加权最小二乘算法求式(15)的解:4c. Solve a system of linear equations. Use the weighted least squares algorithm to find the solution of equation (15):

其中,W为权值矩阵,是由各个测量值误差标准差之和的倒数组成的对角阵。Among them, W is the weight matrix, which is a diagonal matrix composed of the reciprocal of the sum of the error standard deviations of each measurement value.
4d、更新方程组的解和协方差矩阵。4d. Update the solution and covariance matrix of the system of equations.
Xk=Xk-1+ΔX=Xk-1+[Δxk,k-1 Δyk,k-1 Δzk,k-1]T (17)Xk =Xk-1 +ΔX=Xk-1 +[Δxk,k-1 Δyk,k-1 Δzk,k-1 ]T (17)

4e、判断牛顿迭代的收敛性。4e. Judge the convergence of Newton iteration.
若牛顿迭代已经收敛到了所需要的精度,则牛顿迭代法可终止循环运算,并将当前这一次迭代计算后的更新值(即Xk)作为最终结果;否则,k值增1,并返回至3b再重复进行一次牛顿迭代计算。If the Newton iteration has converged to the required accuracy, the Newton iteration method can terminate the loop operation and use the updated value (ie Xk ) calculated by the current iteration as the final result; otherwise, the value of k is increased by 1 and returns to 3b Repeat the Newton iteration calculation again.
Claims (5)

























Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911220031.7ACN110888110A (en) | 2019-12-03 | 2019-12-03 | Indoor carrier phase positioning model construction method suitable for WiFi |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911220031.7ACN110888110A (en) | 2019-12-03 | 2019-12-03 | Indoor carrier phase positioning model construction method suitable for WiFi |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110888110Atrue CN110888110A (en) | 2020-03-17 |
Family
ID=69750145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911220031.7APendingCN110888110A (en) | 2019-12-03 | 2019-12-03 | Indoor carrier phase positioning model construction method suitable for WiFi |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110888110A (en) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111521969A (en)* | 2020-04-17 | 2020-08-11 | 西北工业大学 | Passive indoor positioning method based on Wi-Fi |
| CN111683344A (en)* | 2020-06-02 | 2020-09-18 | 南京敏智达科技有限公司 | Wireless indoor positioning method based on Wi-Fi |
| CN111866713A (en)* | 2020-07-09 | 2020-10-30 | 北京邮电大学 | A positioning method, device and electronic device |
| CN112180323A (en)* | 2020-09-08 | 2021-01-05 | 重庆邮电大学 | Research on indoor joint positioning algorithm of TOA and AOA based on Wi-Fi |
| CN112953660A (en)* | 2021-01-26 | 2021-06-11 | 电子科技大学 | Stable channel state information CSI phase calibration method |
| CN113473593A (en)* | 2021-06-23 | 2021-10-01 | 重庆邮电大学 | Target passive positioning method based on single station |
| CN114302323A (en)* | 2021-12-15 | 2022-04-08 | 中山大学 | A method and system for indoor three-dimensional positioning and timing based on medium and long waves |
| CN114466448A (en)* | 2020-11-10 | 2022-05-10 | 大唐移动通信设备有限公司 | Positioning method, positioning device and processor-readable storage medium |
| CN114501315A (en)* | 2022-03-30 | 2022-05-13 | 中国农业银行股份有限公司 | Indoor positioning method, device and equipment based on WiFi |
| CN115902768A (en)* | 2021-08-10 | 2023-04-04 | 大唐移动通信设备有限公司 | Positioning method, device and storage medium of terminal equipment |
| CN116054971A (en)* | 2023-01-06 | 2023-05-02 | 网络通信与安全紫金山实验室 | Antenna phase error correction method, device, base station and storage medium |
| CN116208456A (en)* | 2021-11-30 | 2023-06-02 | 苏州触达信息技术有限公司 | Multi-device angular positioning and user identification method |
| US20240035831A1 (en)* | 2022-07-28 | 2024-02-01 | Robert Bosch Gmbh | Vehicle road side identification of a target via differential amplitude rf signals |
| CN119421239A (en)* | 2025-01-07 | 2025-02-11 | 华东师范大学 | A 5G scenario non-line-of-sight positioning method based on error compensation |
| US12382247B2 (en) | 2022-07-28 | 2025-08-05 | Robert Bosch Gmbh | Vehicle road side location of a target via unwrapped differential phase RF signals |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100061427A1 (en)* | 2006-03-03 | 2010-03-11 | Agence Spatiale Europeenne | Method Of Processing Positioning Signals, In Particular For Indoor Applications |
| US20140113652A1 (en)* | 2012-10-24 | 2014-04-24 | Yael G. Maguire | Sensing Distance Between Wireless Devices Using Multiple Scales of Controlled Bandwidth |
| CN105264920A (en)* | 2012-12-12 | 2016-01-20 | 英维斯塔克有限公司 | Multipath suppression when ranging and tracking objects using reduced attenuation RF techniques |
| CN106646562A (en)* | 2016-09-09 | 2017-05-10 | 华东师范大学 | High-precision three-dimensional real scene indoor and outdoor integrated positioning method and device |
| CN107305255A (en)* | 2016-04-25 | 2017-10-31 | 富士通株式会社 | Localization method, positioner and electronic equipment |
| US20170332192A1 (en)* | 2016-05-13 | 2017-11-16 | Qualcomm Incorporated | Method and/or system for positioning of a mobile device |
| CN109085563A (en)* | 2018-06-26 | 2018-12-25 | 重庆邮电大学 | WLAN ranging technology based on Software Radio platform |
- 2019
- 2019-12-03CNCN201911220031.7Apatent/CN110888110A/enactivePending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100061427A1 (en)* | 2006-03-03 | 2010-03-11 | Agence Spatiale Europeenne | Method Of Processing Positioning Signals, In Particular For Indoor Applications |
| US20140113652A1 (en)* | 2012-10-24 | 2014-04-24 | Yael G. Maguire | Sensing Distance Between Wireless Devices Using Multiple Scales of Controlled Bandwidth |
| CN105264920A (en)* | 2012-12-12 | 2016-01-20 | 英维斯塔克有限公司 | Multipath suppression when ranging and tracking objects using reduced attenuation RF techniques |
| CN107305255A (en)* | 2016-04-25 | 2017-10-31 | 富士通株式会社 | Localization method, positioner and electronic equipment |
| US20170332192A1 (en)* | 2016-05-13 | 2017-11-16 | Qualcomm Incorporated | Method and/or system for positioning of a mobile device |
| CN106646562A (en)* | 2016-09-09 | 2017-05-10 | 华东师范大学 | High-precision three-dimensional real scene indoor and outdoor integrated positioning method and device |
| CN109085563A (en)* | 2018-06-26 | 2018-12-25 | 重庆邮电大学 | WLAN ranging technology based on Software Radio platform |
Non-Patent Citations (3)
| Title |
|---|
| I. SHARP等: ""Indoor TOA Error Measurement, Modeling, and Analysis"", 《IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT》* |
| 蔡雄: ""基于CSI的室内WiFi定位技术研究"", 《中国优秀硕士学位论文全文数据库 (信息科技辑)》* |
| 魏征: ""复杂城市环境下BDS/WLAN融合定位算法研究"", 《中国优秀博硕士学位论文全文数据库(硕士)信息科技辑》* |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111521969A (en)* | 2020-04-17 | 2020-08-11 | 西北工业大学 | Passive indoor positioning method based on Wi-Fi |
| CN111683344A (en)* | 2020-06-02 | 2020-09-18 | 南京敏智达科技有限公司 | Wireless indoor positioning method based on Wi-Fi |
| CN111866713A (en)* | 2020-07-09 | 2020-10-30 | 北京邮电大学 | A positioning method, device and electronic device |
| CN111866713B (en)* | 2020-07-09 | 2021-09-10 | 北京邮电大学 | Positioning method and device and electronic equipment |
| CN112180323A (en)* | 2020-09-08 | 2021-01-05 | 重庆邮电大学 | Research on indoor joint positioning algorithm of TOA and AOA based on Wi-Fi |
| CN114466448B (en)* | 2020-11-10 | 2023-04-11 | 大唐移动通信设备有限公司 | Positioning method, positioning device and processor-readable storage medium |
| CN114466448A (en)* | 2020-11-10 | 2022-05-10 | 大唐移动通信设备有限公司 | Positioning method, positioning device and processor-readable storage medium |
| CN112953660A (en)* | 2021-01-26 | 2021-06-11 | 电子科技大学 | Stable channel state information CSI phase calibration method |
| CN112953660B (en)* | 2021-01-26 | 2022-08-05 | 电子科技大学 | A Robust Channel State Information CSI Phase Calibration Method |
| CN113473593B (en)* | 2021-06-23 | 2022-07-15 | 重庆邮电大学 | A passive target localization method based on single station |
| CN113473593A (en)* | 2021-06-23 | 2021-10-01 | 重庆邮电大学 | Target passive positioning method based on single station |
| CN115902768A (en)* | 2021-08-10 | 2023-04-04 | 大唐移动通信设备有限公司 | Positioning method, device and storage medium of terminal equipment |
| CN116208456A (en)* | 2021-11-30 | 2023-06-02 | 苏州触达信息技术有限公司 | Multi-device angular positioning and user identification method |
| CN114302323A (en)* | 2021-12-15 | 2022-04-08 | 中山大学 | A method and system for indoor three-dimensional positioning and timing based on medium and long waves |
| CN114302323B (en)* | 2021-12-15 | 2023-11-07 | 中山大学 | Indoor three-dimensional positioning time service method and system based on medium-length waves |
| CN114501315A (en)* | 2022-03-30 | 2022-05-13 | 中国农业银行股份有限公司 | Indoor positioning method, device and equipment based on WiFi |
| US20240035831A1 (en)* | 2022-07-28 | 2024-02-01 | Robert Bosch Gmbh | Vehicle road side identification of a target via differential amplitude rf signals |
| US12382247B2 (en) | 2022-07-28 | 2025-08-05 | Robert Bosch Gmbh | Vehicle road side location of a target via unwrapped differential phase RF signals |
| CN116054971A (en)* | 2023-01-06 | 2023-05-02 | 网络通信与安全紫金山实验室 | Antenna phase error correction method, device, base station and storage medium |
| CN119421239A (en)* | 2025-01-07 | 2025-02-11 | 华东师范大学 | A 5G scenario non-line-of-sight positioning method based on error compensation |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110888110A (en) | Indoor carrier phase positioning model construction method suitable for WiFi | |
| CN110290491B (en) | An indoor target localization method based on multipath assistance | |
| CN112073895A (en) | High-precision personnel positioning and tracking method based on CSI | |
| Ho et al. | Decentralized adaptive indoor positioning protocol using Bluetooth Low Energy | |
| CN106353720B (en) | Multistation consecutive tracking model based on TDOA/GROA | |
| CN103796304B (en) | One kind is based on virtual training collection and markovian underground coal mine localization method | |
| Chabbar et al. | Indoor localization using Wi-Fi method based on Fingerprinting Technique | |
| CN108872971B (en) | A kind of target localization method and device based on single motion array | |
| CN106656889B (en) | A kind of UWB indoor localization method based on CW with frequency modulation | |
| CN107015196B (en) | A kind of single node indoor orientation method based on power delay profile Yu direction of arrival ranging | |
| CN110351658A (en) | A kind of indoor orientation method based on convolutional neural networks | |
| CN109085563B (en) | WLAN ranging method based on software radio platform | |
| CN101702827A (en) | Estimation method of TOA positioning and precise positioning method based on this estimation method | |
| WO2018119949A1 (en) | Channel state information phase correction method and apparatus | |
| CN106255203A (en) | Location method based on MDS-based terminal RSRP difference compensation | |
| Guo et al. | Virtual wireless device-constrained robust extended Kalman filters for smartphone positioning in indoor corridor environment | |
| Kumar et al. | Phase-based angle estimation approach in indoor localization system using Bluetooth low energy | |
| CN115524661B (en) | Shortwave time difference positioning method based on joint optimization of ionospheric altitude and target position | |
| CN108279411A (en) | A kind of passive MIMO time difference positioning methods based on MDS | |
| CN103987117A (en) | A positioning method for signal transmitting stations based on mobile terminal monitoring | |
| Qiao et al. | The trip to WiFi indoor localization across a decade—A systematic review | |
| CN106371078B (en) | A Passive Localization Method for Multiple Sources Based on Joint Estimation of Transmit Waveform and Position | |
| Yin et al. | Autocali: Enhancing AoA-based indoor localization through automatic phase calibration | |
| Gu et al. | Indoor localization fusion algorithm based on signal filtering optimization of multi-sensor | |
| CN110248310A (en) | A kind of indoor positioning TDOA processing method based on multipath modeling |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication | Application publication date:20200317 |