CN110757434B - Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing method - Google Patents
Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing methodDownload PDFInfo
- Publication number
- CN110757434B CN110757434BCN201911076288.XACN201911076288ACN110757434BCN 110757434 BCN110757434 BCN 110757434BCN 201911076288 ACN201911076288 ACN 201911076288ACN 110757434 BCN110757434 BCN 110757434B
- Authority
- CN
- China
- Prior art keywords
- flexible electrode
- dielectric elastomer
- stiffness
- deformation structure
- artificial muscle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0015—Flexure members, i.e. parts of manipulators having a narrowed section allowing articulation by flexion
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Prostheses (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种人工肌肉,具体涉及一种基于介电弹性体与可调刚度智能流体的人工肌肉及其制备方法,属于仿生智能材料与结构领域。The invention relates to an artificial muscle, in particular to an artificial muscle based on a dielectric elastomer and an adjustable stiffness intelligent fluid and a preparation method thereof, belonging to the field of bionic intelligent materials and structures.
背景技术Background technique
人工肌肉是一种新型智能高分子材料,能在外加电场下,通过材料内部结构的改变而伸缩、弯曲、束紧或膨胀,其行为接近真正的肌肉纤维。目前用于制备人工肌肉的材料有压电材料、高分子液晶材料、尼龙丝材料、聚合物材料、天然橡胶材料等。其中,有一种聚合物介电弹性体在处于电场中时,行为表现为沿电力线的方向收缩,同时沿垂直于电力线的方向膨胀,这种现象被称为麦克斯韦应力。这种性质行为与肌肉的收缩类似,同时此类介电弹性体具备变形大、机电转换率高、造价比较低廉等优点,因而被广泛用于人工肌肉。然而,此类介电弹性体制备的人工肌肉不能调节刚度。现有的可调节刚度的气动人工肌肉一般通过压缩空气来获得动力来源,但是提供能源的泵机占地面积相对庞大,不适合进行远距离移动,而且气体在低速运动的时候,其气体的低速稳定性较差,不易精确的控制。液压人工肌肉工作原理类似于气动人工肌肉,和传统上的气动人工肌肉一样,有着类似的缺陷。Artificial muscle is a new type of intelligent polymer material, which can stretch, bend, tighten or expand by changing the internal structure of the material under an external electric field, and its behavior is close to that of a real muscle fiber. Materials currently used to prepare artificial muscles include piezoelectric materials, polymer liquid crystal materials, nylon filament materials, polymer materials, and natural rubber materials. Among them, there is a polymer dielectric elastomer that behaves by shrinking in the direction of the electric force lines and expanding in the direction perpendicular to the electric force lines when exposed to an electric field, a phenomenon called Maxwell stress. This property behavior is similar to muscle contraction. At the same time, such dielectric elastomers have the advantages of large deformation, high electromechanical conversion rate, and relatively low cost, so they are widely used in artificial muscles. However, artificial muscles made from such dielectric elastomers cannot modulate stiffness. The existing pneumatic artificial muscles with adjustable stiffness generally obtain the power source by compressing air, but the pump that provides the energy occupies a relatively large area and is not suitable for long-distance movement. Poor stability, not easy to precise control. Hydraulic artificial muscles work similar to pneumatic artificial muscles, and have similar shortcomings as traditional pneumatic artificial muscles.
发明内容SUMMARY OF THE INVENTION
本发明的主要目的在于提供一种基于介电弹性体与可调刚度智能流体的人工肌肉及其制备方法,以克服现有技术中的不足。The main purpose of the present invention is to provide an artificial muscle based on a dielectric elastomer and an adjustable stiffness intelligent fluid and a preparation method thereof, so as to overcome the deficiencies in the prior art.
为实现前述发明目的,本发明采用的技术方案包括:In order to realize the foregoing invention purpose, the technical scheme adopted in the present invention includes:
本发明实施例提供了一种基于介电弹性体与可调刚度智能流体的人工肌肉,其包括形变结构和刚度调节结构,所述形变结构包括介电弹性体薄膜,所述刚度调节结构包括被填充于密封空腔内的电流变液,所述密封空腔与形变结构结合,并且所述介电弹性体薄膜和电流变液均与柔性电极电性结合。An embodiment of the present invention provides an artificial muscle based on a dielectric elastomer and an adjustable stiffness smart fluid, which includes a deformation structure and a stiffness adjustment structure, the deformation structure includes a dielectric elastomer film, and the stiffness adjustment structure includes a The electrorheological fluid filled in the sealed cavity is combined with the deformation structure, and both the dielectric elastomer film and the electrorheological fluid are electrically combined with the flexible electrode.
在一些实施方式中,其中至少一个所述柔性电极的至少局部区域还构成所述空腔的局部的壁,并与被填充于所述空腔内的电流变液电性接触。In some embodiments, at least a partial region of at least one of the flexible electrodes also constitutes a partial wall of the cavity and is in electrical contact with the electrorheological fluid filled in the cavity.
在一些实施方式中,所述形变结构包括第一形变结构和第二形变结构,所述刚度调节结构设于所述第一形变结构和第二形变结构之间,所述第一形变结构包括第一介电弹性体薄膜,所述第一介电弹性体薄膜的两侧表面上分别附着有第一柔性电极、第二柔性电极,所述第二介电弹性体薄膜的两侧表面上分别附着有第三柔性电极、第四柔性电极,所述刚度调节结构还包括介电弹性体支撑结构,彼此相对设置的所述第二柔性电极及第三柔性电极与所述介电弹性体支撑结构配合形成所述空腔。In some embodiments, the deformation structure includes a first deformation structure and a second deformation structure, the stiffness adjustment structure is provided between the first deformation structure and the second deformation structure, and the first deformation structure includes a first deformation structure. A dielectric elastomer film, the first flexible electrode and the second flexible electrode are respectively attached to the two sides of the first dielectric elastomer film, and the two sides of the second dielectric elastomer film are respectively attached There are a third flexible electrode and a fourth flexible electrode, the stiffness adjustment structure further includes a dielectric elastomer support structure, and the second flexible electrode and the third flexible electrode disposed opposite to each other cooperate with the dielectric elastomer support structure forming the cavity.
在一些实施方式中,所述第一柔性电极、第二柔性电极、第三柔性电极、第四柔性电极均能够通过导线与外部电源电连接。In some embodiments, the first flexible electrode, the second flexible electrode, the third flexible electrode, and the fourth flexible electrode can all be electrically connected to an external power source through wires.
其中,通过调控向前述四个电极加载电压的方式,可以实现所述人工肌肉双向多角度弯曲,并使所述人工肌肉在空气和液体中都可以工作。Wherein, by regulating the way of applying voltage to the aforementioned four electrodes, the artificial muscle can be bent in both directions and at multiple angles, and the artificial muscle can work in both air and liquid.
在一些实施方式中,所述介电弹性体支撑结构具有框型结构,所述第二柔性电极、第三柔性电极与所述框型结构密封围合成所述空腔。In some embodiments, the dielectric elastomer support structure has a frame-shaped structure, and the second flexible electrode, the third flexible electrode and the frame-shaped structure are sealed to form the cavity.
在一些实施方式中,所述形变结构的外表面还覆盖有绝缘保护层。亦即,在所述人工肌肉表面还可覆设绝缘保护层。所述绝缘保护层可以是聚二甲基硅氧烷等材质的,且不限于此。In some embodiments, the outer surface of the deformable structure is further covered with an insulating protective layer. That is, the surface of the artificial muscle can also be covered with an insulating protective layer. The insulating protective layer may be made of materials such as polydimethylsiloxane, and is not limited thereto.
本发明实施例还提供了一种基于介电弹性体与可调刚度智能流体的人工肌肉的制作方法,其包括:The embodiment of the present invention also provides a method for making an artificial muscle based on a dielectric elastomer and an adjustable stiffness intelligent fluid, which includes:
提供介电弹性体薄膜,并在所述介电弹性体薄膜表面设置至少一柔性电极,从而形成形变结构;providing a dielectric elastomer film, and disposing at least one flexible electrode on the surface of the dielectric elastomer film to form a deformable structure;
制作与所述形变结构结合的空腔,并在所述空腔内填充电流变液,从而形成刚度调节结构,其中所述电流变液与至少一所述的柔性电极电性接触。A cavity combined with the deformable structure is fabricated, and an electrorheological fluid is filled in the cavity to form a stiffness adjusting structure, wherein the electrorheological fluid is in electrical contact with at least one of the flexible electrodes.
在一些实施方式中,所述的制作方法具体包括:In some embodiments, the manufacturing method specifically includes:
提供第一介电弹性体薄膜,并在所述第一介电弹性体薄膜的两侧表面上分别设置第一柔性电极、第二柔性电极,从而形成第一形变结构;A first dielectric elastomer film is provided, and a first flexible electrode and a second flexible electrode are respectively arranged on both sides of the first dielectric elastomer film, thereby forming a first deformation structure;
提供第二介电弹性体薄膜,并在所述第二介电弹性体薄膜的两侧表面上分别设置第三柔性电极、第四柔性电极,从而形成第二形变结构;A second dielectric elastomer film is provided, and a third flexible electrode and a fourth flexible electrode are respectively arranged on both sides of the second dielectric elastomer film, thereby forming a second deformation structure;
制作介电弹性体支撑结构,并将所述介电弹性体支撑结构与彼此相对设置的所述第二柔性电极及第三柔性电极结合,形成密封空腔,且使所述第二柔性电极、第三柔性电极的至少局部区域作为所述密封空腔的壁;A dielectric elastomer support structure is fabricated, and the dielectric elastomer support structure is combined with the second flexible electrode and the third flexible electrode disposed opposite to each other to form a sealed cavity, and the second flexible electrode, At least a partial area of the third flexible electrode acts as a wall of the sealed cavity;
在所述密封空腔内填充电流变液,从而形成刚度调节结构。The sealed cavity is filled with an electrorheological fluid, thereby forming a stiffness adjusting structure.
在一些实施方式中,所述的制作方法还包括:取与所述第一形变结构或第二形变结构具有相同面积的预拉伸介电弹性体,并对所述预拉伸介电弹性体进行切割加工,从而形成具有框型结构的介电弹性体支撑结构。In some embodiments, the manufacturing method further comprises: taking a pre-stretched dielectric elastomer having the same area as the first deformation structure or the second deformation structure, and applying the pre-stretched dielectric elastomer to the pre-stretched dielectric elastomer. A cutting process is performed to form a dielectric elastomer support structure having a frame-like structure.
在一些实施方式中,所述的制作方法具体包括:In some embodiments, the manufacturing method specifically includes:
从所述预拉伸介电弹性体中切割去除与所述第二柔性电极或第三柔性电极面积相近的部分,从而形成框型结构;Cutting and removing a portion close to the area of the second flexible electrode or the third flexible electrode from the pre-stretched dielectric elastomer to form a frame-shaped structure;
将所述框型结构的两个开口端分别与所述第二柔性电极、第三柔性电极粘接,从而围合形成所述的密封空腔;Bonding the two open ends of the frame-shaped structure with the second flexible electrode and the third flexible electrode respectively, so as to enclose and form the sealed cavity;
将电流变液注入所述密封空腔,并使所述密封空腔被充满。An electrorheological fluid is injected into the sealed cavity and the sealed cavity is filled.
在一些实施方式中,所述的制作方法还包括:从所述第一柔性电极、第二柔性电极、第三柔性电极、第四柔性电极上引出导线,用于连接电源。In some embodiments, the manufacturing method further includes: drawing out wires from the first flexible electrode, the second flexible electrode, the third flexible electrode, and the fourth flexible electrode for connecting to a power source.
本发明实施例还提供了一种对所述人工肌肉的工作模式进行调控的方法,其包括:选择性的将第一柔性电极、第二柔性电极、第三柔性电极、第四柔性电极中的一者或多者与电源电连接,从而调控所述人工肌肉的工作模式。The embodiment of the present invention also provides a method for regulating the working mode of the artificial muscle, which includes: selectively connecting the first flexible electrode, the second flexible electrode, the third flexible electrode, and the fourth flexible electrode One or more are electrically connected to a power source to modulate the working mode of the artificial muscle.
较之现有技术,本发明提供的人工肌肉是充分利用介电弹性体与可调刚度智能流体两种材料面对电场刺激呈现的不同反应机制,并综合各自优势而形成,其结构简单,体积小巧紧凑,在空气环境和液体环境中均可使用,反应灵敏,能实现双向多角度弯曲运动,且刚度可以方便地无级调控,同时还易于制备,在众多领域具有广阔应用前景。Compared with the prior art, the artificial muscle provided by the present invention is formed by making full use of the different reaction mechanisms presented by the dielectric elastomer and the adjustable stiffness intelligent fluid in the face of electric field stimulation, and combining their respective advantages. It is small and compact, can be used in both air and liquid environments, has a sensitive response, can realize bidirectional and multi-angle bending motion, and can be conveniently and steplessly regulated in stiffness. At the same time, it is easy to prepare and has broad application prospects in many fields.
为了能更进一步了解本发明的特征以及技术内容,请参阅以下有关本发明的详细说明与附图,然而附图仅提供参考与说明用,并非用来对本发明加以限制。In order to further understand the features and technical content of the present invention, please refer to the following detailed description of the present invention and the accompanying drawings, however, the accompanying drawings are only for reference and illustration, and are not intended to limit the present invention.
附图说明Description of drawings
下面结合附图,通过对本发明的具体实施方式详细描述,将使本发明的技术方案及其它有益效果显而易见。The technical solutions and other beneficial effects of the present invention will be apparent through the detailed description of the specific embodiments of the present invention with reference to the accompanying drawings.
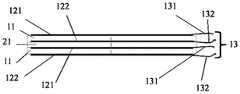
图1为本发明一典型实施例提供的一种人工肌肉的结构示意图;1 is a schematic structural diagram of an artificial muscle provided by a typical embodiment of the present invention;
图2为本发明一典型实施例中一种形变结构的侧视图;FIG. 2 is a side view of a deformation structure in an exemplary embodiment of the present invention;
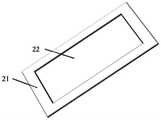
图3为本发明一典型实施例提供的一种刚度调节结构的示意图;3 is a schematic diagram of a stiffness adjustment structure provided by an exemplary embodiment of the present invention;
图4为本发明一典型实施例提供的一种人工肌肉的一种工作状态示意图;4 is a schematic diagram of a working state of an artificial muscle provided by an exemplary embodiment of the present invention;
图5为本发明一典型实施例提供的一种人工肌肉的另一种工作状态示意图;5 is a schematic diagram of another working state of an artificial muscle provided by an exemplary embodiment of the present invention;
图6为本发明一典型实施例提供的一种人工肌肉的又一种工作状态示意图;6 is a schematic diagram of another working state of an artificial muscle provided by an exemplary embodiment of the present invention;
附图标记说明:1-形变结构;11-介电弹性体薄膜;12-柔性电极;121-柔性电极一;122-柔性电极二;13-导线;131-导线一;132-导线二;2-刚度调节结构;21-介电弹性体支撑体;22-电流变液。Description of reference numerals: 1-deformation structure; 11-dielectric elastomer film; 12-flexible electrode; 121-flexible electrode one; 122-flexible electrode two; - Stiffness adjusting structure; 21 - Dielectric elastomer support; 22 - Electrorheological fluid.
具体实施方式Detailed ways
为更进一步阐述本发明所采取的技术手段及其效果,以下结合本发明的优选实施例及其附图进行详细描述。In order to further illustrate the technical means adopted by the present invention and its effects, a detailed description is given below in conjunction with the preferred embodiments of the present invention and the accompanying drawings.
在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”“后”等指示方位或者位置关系都是基于附图所示的方位或者位置关系,仅是为了便于描述本发明和简化描述,而不是组件必须具有的方位限制与特定的位置关系,因此不能理解为对本发明的限制。In the description of the present invention, it should be understood that the terms "upper", "lower", "left", "right", "front", "rear", etc. indicate the orientation or the positional relationship is based on the orientation shown in the accompanying drawings Or the positional relationship is only for the convenience of describing the present invention and simplifying the description, rather than the orientation limitation and specific positional relationship that the components must have, and therefore should not be construed as a limitation of the present invention.
本发明主要是通过将可以收缩的介电弹性体与可在电场调控下的电流变液结合,其中介电弹性体在电场激励下,电能转化为动能,并且良好的收缩性可以完美匹配人工肌肉进行运动,而电流变液在电场的刺激下,由液态转变为固态,为人工肌肉进一步提供可调控的刚度。将两种材料面对电场的反应机制进行协同,发挥各自的优势,实现易于调控刚度、反应灵敏的人工肌肉。The invention mainly combines a contractable dielectric elastomer with an electrorheological fluid that can be controlled by an electric field, wherein the dielectric elastomer converts electrical energy into kinetic energy under the excitation of an electric field, and its good contractility can perfectly match artificial muscles Under the stimulation of an electric field, the electrorheological fluid changes from a liquid state to a solid state, which further provides the artificial muscle with tunable stiffness. Synergizing the response mechanisms of the two materials to the electric field and giving full play to their respective advantages enables the realization of artificial muscles with easy-to-adjust stiffness and responsiveness.
相应的,本发明实施例的一个方面提供了一种介电弹性体与可调刚度智能流体结合的人工肌肉,其包括相互结合的形变结构与刚度调节结构,所述形变结构包括介电弹性体薄膜,所述介电弹性体薄膜两侧表面分别附着柔性电极;所述刚度调节结构包括电流变液,所述电流变液填充在密封空腔中。Correspondingly, an aspect of the embodiments of the present invention provides an artificial muscle combined with a dielectric elastomer and an adjustable stiffness intelligent fluid, which includes a deformable structure and a stiffness adjustment structure combined with each other, and the deformable structure includes a dielectric elastomer A film, flexible electrodes are respectively attached to both sides of the dielectric elastomer film; the stiffness adjustment structure includes an electrorheological fluid, and the electrorheological fluid is filled in the sealed cavity.
在一些实施方式中,所述刚度调节结构设置在两个形变结构之间。In some embodiments, the stiffness-adjusting structure is disposed between two deforming structures.
在一些实施方式中,所述刚度调节结构还包括介电弹性体支撑体,所述电流变液填充在所述介电弹性体支撑与柔性电极形成的所述密封空腔中。In some embodiments, the stiffness adjusting structure further includes a dielectric elastomer support, and the electrorheological fluid is filled in the sealed cavity formed by the dielectric elastomer support and the flexible electrode.
在本说明书中,所述介电弹性体与电流变液均具备响应电场的特点,且具有可恢复性,当电场消失后,能恢复到原有的状态。In this specification, both the dielectric elastomer and the electrorheological fluid have the characteristics of responding to the electric field and are recoverable, and can return to the original state after the electric field disappears.
进一步的,所述介电弹性体是一类在外加电场激励下可以发生变形以进行能量转换的材料,在仿生学、生物医学等领域应用广泛,其具有大变形、质量轻、无噪声等优点。所述介电弹性体可以通过公众所知的任何途径获取,例如可以通过市售途径获取。Further, the dielectric elastomer is a type of material that can deform under the excitation of an external electric field for energy conversion, and is widely used in bionics, biomedicine and other fields, and has the advantages of large deformation, light weight, and no noise. . The dielectric elastomer can be obtained by any means known to the public, such as commercially available sources.
在本说明书中,所述介电弹性体在麦克斯韦应力作用下,驱动着整个人工肌肉,当电场消失后,介电弹性体恢复到原有形状,一收一缩间进行模拟肌肉的活动。In this specification, the dielectric elastomer drives the entire artificial muscle under the action of Maxwell stress. When the electric field disappears, the dielectric elastomer returns to its original shape, and simulates muscle activity between contractions and contractions.
在本说明书中,所述介电弹性体具备高介电常数的特点,在麦克斯韦应力下有着较大的电致变形,弹性优良。作为优选,可根据条件将所述的介电弹性体进行预拉伸,预拉伸的方向与倍数可根据实际情况调整。适用于本发明的介电弹性体可选用但不限于聚氨酯弹性体、硅胶、丙烯酸酯等材料。In this specification, the dielectric elastomer has the characteristics of high dielectric constant, large electro-deformation under Maxwell stress, and excellent elasticity. Preferably, the dielectric elastomer can be pre-stretched according to conditions, and the direction and multiple of pre-stretching can be adjusted according to actual conditions. The dielectric elastomer suitable for the present invention can be selected from, but not limited to, polyurethane elastomer, silica gel, acrylate and other materials.
在本说明书中,所述电流变液作为一种智能流体,通常情况下以悬浮液形式存在,在电场的作用下,可以发生液态-固态的转变,当电场强度高于某个阈值,便转变为类固态,一旦低于此阈值便恢复原有的液态,这种特性使其在在机械工程、汽车工程、控制工程等领域具有广阔应用前景。所述电流变液可以通过公众所知的任何途径获取,例如可以通过市售途径获取。In this specification, the ER fluid, as a smart fluid, usually exists in the form of a suspension. Under the action of an electric field, a liquid-solid transition can occur. When the electric field strength is higher than a certain threshold, the transition will occur. It is a solid-like state, and once it is lower than this threshold, it will return to the original liquid state, which makes it have broad application prospects in mechanical engineering, automotive engineering, control engineering and other fields. The electrorheological fluid can be obtained by any means known to the public, such as commercially available means.
进一步的,所述电流变液为介电微粒与绝缘液体混合而成的悬浮液体,其屈服应力、粘度以及弹性模量能够随施加电场强度的变化而发生变化,本发明实施例的人工肌肉在介电弹性体受电场激励下驱动变形后,同期电流变液在电场刺激下,由液相转化为固相,肌肉的刚度也随电流变效应而提高。Further, the electrorheological fluid is a suspension liquid formed by mixing dielectric particles and insulating liquid, and its yield stress, viscosity, and elastic modulus can change with the intensity of the applied electric field. The artificial muscle of the embodiment of the present invention is After the dielectric elastomer is driven and deformed by the electric field, the electrorheological fluid is transformed from the liquid phase to the solid phase under the electric field stimulation at the same time, and the stiffness of the muscle also increases with the electrorheological effect.
进一步的,在本发明实施例中,电流变液被封装在介电弹性体间,在施加电压时,固化变形后的形状。Further, in the embodiment of the present invention, the electrorheological fluid is encapsulated between the dielectric elastomers, and the deformed shape is cured when a voltage is applied.
进一步的,在本发明实施例中,所述柔性电极可以通过导线与电源电连接。Further, in the embodiment of the present invention, the flexible electrode may be electrically connected to a power source through a wire.
进一步的,在本发明实施例中,所述电源可以采用直流电源,其可以提供的电压为0-10KV,但不限于此。Further, in the embodiment of the present invention, the power supply can be a DC power supply, which can provide a voltage of 0-10KV, but is not limited thereto.
请参阅图1-3所示,在本发明的一个较为具体的实施案例中,一种介电弹性体与可调刚度智能流体结合的人工肌肉包括形变结构1与刚度调节结构2,所述刚度调节结构2设置在两片形变结构1之间。Please refer to FIGS. 1-3. In a specific implementation case of the present invention, an artificial muscle combining a dielectric elastomer with an adjustable stiffness intelligent fluid includes a deformation structure 1 and a
所述形变结构1包括介电弹性体薄膜11,所述介电弹性体薄膜11上下表面分别附着与导线131相连的柔性电极一121和与导线132相连的柔性电极二122。The deformable structure 1 includes a
所述刚度调节结构2包括介电弹性体支撑体21和电流变液22,所述电流变液填充在介电弹性体支撑体21与柔性电极12形成的空腔中。The
其中,介电弹性体支撑体21与介电弹性体薄膜11可以是相同材质的,以使形变结构1与刚度调节结构2具有更好的协调性。Wherein, the dielectric
在使用时,可以将所述导线131与电源正极相接,导线132与电源负极相接。反之亦可。In use, the
该实施案例提供的人工肌肉可以有多种工作模式,例如:The artificial muscles provided in this example can have various working modes, such as:
第一工作模式:请继续参阅图1,将刚度调节结构2上、下两侧表面的柔性电极通过导线131、132与电源电连接,对电流变液施加电压,电流变液22粘度增加,人工肌肉刚度提升。并且人工肌肉的刚度可以通过改变施加电压的大小调节。The first working mode: please continue to refer to FIG. 1, connect the flexible electrodes on the upper and lower sides of the
第二工作模式:请参阅图4,将右侧导线131、右侧导线132及左侧导线131与电源电连接,对右侧介电弹性体薄膜11、电流变液22施加电压,右侧介电弹性体薄膜11舒张,使人工肌肉向左侧弯曲;同时电流变液22屈服强度增加,人工肌肉刚度提升。人工肌肉的弯曲角度和刚度可以通过改变施加电压大小调节。Second working mode: please refer to FIG. 4 , connect the
第三工作模式:请参阅图5,将左侧导线131、左侧导线132及右侧导线132与电源电连接,对左侧介电弹性体薄膜11、电流变液22施加电压,左侧介电弹性体薄膜11舒张,使人工肌肉向右侧弯曲;同时电流变液22粘度增加,人工肌肉刚度提升。人工肌肉的弯曲角度和刚度可以通过改变施加电压大小调节。The third working mode: please refer to FIG. 5 , the
第四工作模式:请参阅图6,将左侧导线131、左侧导线132、右侧导线131及右侧导线132与电源电连接,对左侧介电弹性体薄膜11和右侧介电弹性体薄膜11施加电压,左侧介电弹性体薄膜11和左侧介电弹性体薄膜11同时舒张,人工肌肉沿图6中坐标系的Y轴和Z轴伸长;同时电流变液22也被施加电压,电流变液22粘度增加,人工肌肉刚度提升。人工肌肉的伸长比例和刚度可以通过改变施加电压大小调节。Fourth working mode: Please refer to FIG. 6 , connect the
本发明前述实施例提供的人工肌肉通过将介电弹性体与电流变液结合,充分发挥这两者各自的优势,可以有效解决传统人工肌肉驱动体积大、结构复杂等缺点,其中介电弹性体的收缩与电流变液的固液转变两种作用机制的配合可近乎完全模拟了肌肉的行为,其中利用质地柔软而又易拉伸的介电弹性体来充当肌肉纤维,因其具备非常好的弹性,既能满足拉伸往复的多次运动,也可以作为保护内在电流变液的外壳,保证在人工肌肉在循环测试中维持形状。在电场作用下,本发明实施例的人工肌肉由于电流变效应反应速度灵敏,同时在静电击穿电压之下,本发明实施例的人工肌肉可依赖电场的连续无级调控实现人体肌肉的收缩、舒张以及双向多角度弯曲运动。The artificial muscle provided by the foregoing embodiments of the present invention combines the dielectric elastomer and the electrorheological fluid to give full play to their respective advantages, and can effectively solve the shortcomings of the traditional artificial muscle drive such as large volume and complex structure. Among them, the dielectric elastomer The cooperation of the two mechanisms of contraction and the solid-liquid transition of the ER fluid can almost completely simulate the behavior of the muscle, in which the soft and stretchable dielectric elastomer is used as the muscle fiber, because it has a very good Elasticity, which can not only meet the multiple movements of stretching and reciprocating, but also serve as a shell to protect the internal electrorheological fluid, ensuring that the artificial muscle maintains its shape during cyclic testing. Under the action of the electric field, the artificial muscle of the embodiment of the present invention has a sensitive response speed due to the electro-rheological effect, and at the same time, under the electrostatic breakdown voltage, the artificial muscle of the embodiment of the present invention can rely on the continuous stepless regulation of the electric field to realize the contraction of human muscles, Diastolic and bidirectional multi-angle bending movements.
总之,本发明实施例充分利用电流变效应,通过改变电场强度,可以实现人工肌肉刚度的无级调控,且利用介电弹性体与电流变液两者的协同作用,使人工肌肉呈现出优异的综合性能,同时使其小巧独立,无需外接泵机,气源等附件,可在空气环境和液体环境中使用,另外还使其结构简单,易于制备,成本低廉,In a word, the embodiments of the present invention make full use of the electrorheological effect, and by changing the electric field strength, the stepless regulation of the stiffness of the artificial muscle can be realized, and the synergistic effect of the dielectric elastomer and the electrorheological fluid can be used to make the artificial muscle exhibit excellent performance. Comprehensive performance, while making it small and independent, no external pump, air source and other accessories are required, and can be used in air and liquid environments. In addition, it has a simple structure, easy preparation, and low cost.
相应的,本发明实施例的另一个方面还提供了一种制作所述人工肌肉的方法,其主要包括:Correspondingly, another aspect of the embodiments of the present invention also provides a method for making the artificial muscle, which mainly includes:
提供介电弹性体薄膜,并在所述介电弹性体薄膜表面设置至少一柔性电极,从而形成形变结构;providing a dielectric elastomer film, and disposing at least one flexible electrode on the surface of the dielectric elastomer film to form a deformable structure;
制作与所述形变结构结合的空腔,并在所述空腔内填充电流变液,从而形成刚度调节结构,其中所述电流变液与至少一所述的柔性电极电性接触。A cavity combined with the deformable structure is fabricated, and an electrorheological fluid is filled in the cavity to form a stiffness adjusting structure, wherein the electrorheological fluid is in electrical contact with at least one of the flexible electrodes.
在本发明的一些更为具体的实施案例中,例如对于图1-2所示的人工肌肉来说,适用的一种制作方法可以包括如下步骤:In some more specific implementation cases of the present invention, for example, for the artificial muscles shown in Figures 1-2, a suitable manufacturing method may include the following steps:
本发明还提供一种介电弹性体与可调刚度智能流体结合的人工肌肉的制备方法:The present invention also provides a preparation method of an artificial muscle combined with a dielectric elastomer and an adjustable stiffness intelligent fluid:
(1)制备形变结构2:将介电弹性体薄膜预拉伸1-3倍,然后通过涂覆、粘贴、移印或磁控溅射等方式等将电极附着介电弹性体薄膜11的上下表面形成柔性电极一121和柔性电极二122,并引出导线131、132等,用于连接电源;(1) Preparation of deformation structure 2: Pre-stretch the dielectric elastomer film 1-3 times, and then attach electrodes to the upper and lower sides of the
(2)制备刚度调节结构2:取与形变结构同样面积的预拉伸介电弹性体,切割去除与电极面积相近的部分,形成具有中空内腔的框型结构,留待电流变液填充;(2) Preparation of stiffness adjustment structure 2: take the pre-stretched dielectric elastomer with the same area as the deformation structure, cut and remove the part close to the electrode area, form a frame-shaped structure with a hollow inner cavity, and leave it to be filled with the electrorheological fluid;
(3)组装结构:将步骤(2)制作好的一片刚性调节结构2覆盖在步骤1制作好的一片形变结构1上,并将该刚性调节结构2下表面与该形变结构1的柔性电极一131进行粘结;然后再将步骤1制作好的另一片形变结构1覆盖在刚性调节结构2上,刚性调节结构2上表面与该另一片形变结构1的柔性电极二132进行粘结,从而在该三者之间围合形成一密封空腔;然后在形变结构1外表面覆盖一层绝缘保护层;(3) Assembly structure: a piece of
(4)装填电流变液:利用注射器将电流变液注入前述密封空腔中,使之充满。(4) Filling the electrorheological fluid: use a syringe to inject the electrorheological fluid into the aforementioned sealed cavity to fill it up.
显而易见的是,本发明前述实施例提供的人工肌肉制备工艺是非常简便的,而且成本非常低廉。It is obvious that the artificial muscle preparation process provided by the foregoing embodiments of the present invention is very simple, and the cost is very low.
如下是本发明的一些更为具体的实施例。其中,若非特别说明,则如下实施例所使用的各类原料,例如聚氨酯材料薄膜等介电弹性体薄膜、TiO2巨电流变液等均是可以通过市售途径获取的,而其中采用的粘结剂、导线等也均可以是常规类型的,以及,其中采用的各类加工设备、测试设备及配套操作方法也均是业界已知的。The following are some more specific embodiments of the present invention. Wherein, unless otherwise specified, all kinds of raw materials used in the following examples, such as dielectric elastomer films such as polyurethane material films,TiO2 giant electrorheological fluids, etc., can be obtained through commercially available channels, and the adhesives used therein The bonding agent, wire, etc. can also be of conventional type, and various processing equipment, testing equipment and supporting operation methods used therein are also known in the industry.
实施例1:该实施例提供的一种人工肌肉具有图1-图3所示的结构,而其制作方法包括如下步骤:Embodiment 1: A kind of artificial muscle provided by this embodiment has the structure shown in Fig. 1-Fig. 3, and its manufacturing method comprises the following steps:
(1)制备形变结构:将2mm厚的聚氨酯材料薄膜单轴预拉伸1倍,然后将混合碳粉的硅橡胶溶液涂覆在聚氨酯材料薄膜的上下表面,烘干后形成20μm厚柔性电极一和柔性电极二,并引出导线,用于连接电源;(1) Preparation of deformation structure: 2mm thick polyurethane material film is uniaxially pre-stretched by 1 times, then the silicone rubber solution mixed with carbon powder is coated on the upper and lower surfaces of the polyurethane material film, and after drying, a 20μm thick flexible electrode is formed. and flexible electrode two, and lead out the wire for connecting the power supply;
(2)制备刚度调节结构:取同样面积的2mm厚的聚氨酯材料薄膜单轴预拉伸1倍,切割去除与前述柔性电极一或柔性电极二面积相近的部分,形成预留空腔,留待电流变液填充;(2) Preparation of stiffness adjustment structure: take the same area of 2mm thick polyurethane material film uniaxially pre-stretched by 1 times, cut and remove the part similar to the aforementioned flexible electrode 1 or
(3)组装结构:将一片步骤2制作好的刚性调节结构覆盖在一片步骤1制作好的形变结构上,刚性调节结构下表面与该片形变结构的柔性电极一进行粘结;然后再将另一片步骤1制作好的形变结构覆盖在刚性调节结构上,刚性调节结构上表面与该片形变结构的柔性电极二进行粘结,从而使所述预留空腔被封闭形成密封空腔;然后在形变结构外表面覆盖一层聚二甲基硅氧烷溶液形成绝缘保护层;(3) Assembly structure: cover a piece of rigidity adjustment structure made in
(4)装填电流变液:利用注射器将TiO2巨电流变液注入前述密封空腔中,使之充满。(4) Filling the electrorheological fluid: The giant electrorheological fluid of TiO2 was injected into the aforementioned sealed cavity with a syringe to make it full.
本实施例的人工肌肉的工作模式也可以是多种,例如:The working mode of the artificial muscle of this embodiment can also be various, for example:
请再次参阅图4所示,可以将右侧导线131、右侧导线132及左侧导线131与电源连通,对右侧介电弹性体薄膜11和电流变液22施加电压,右侧介电弹性体薄膜11舒张,使人工肌肉向左侧弯曲;同时电流变液22屈服强度增加,人工肌肉刚度提升。人工肌肉的弯曲角度和刚度通过改变施加电压大小调节。电源输出电压6kV,TiO2巨电流变液屈服应力增加到30kPa,人工肌肉向左侧弯曲10度,且其刚度提升,将输出电压提高到8kV,TiO2巨电流变液屈服应力增加到51kPa,人工肌肉向左侧弯曲角度14度,且其刚度进一步提升。Referring to FIG. 4 again, the
也可以将右侧导线132及左侧导线131导线与电源连通,电流变液22屈服强度增加,人工肌肉刚度提升同时人工肌肉不发生形变。电源输出电压2kV,TiO2巨电流变液屈服应力增加到9kPa,人工肌肉刚度提升,将输出电压提高到10kV,TiO2巨电流变液屈服应力增加到69kPa,人工肌肉刚度进一步提升。The
实施例2:Example 2:
该实施例提供的一种人工肌肉具有图1-图3所示的结构,而其制作方法包括如下步骤:An artificial muscle provided by this embodiment has the structure shown in FIGS. 1-3 , and the manufacturing method thereof includes the following steps:
(1)制备形变结构:将1mm厚的3M VHB材料介电弹性体薄膜单轴预拉伸2倍,然后将混合LiCl制备而成的聚丙烯酰胺水凝胶电极黏附在3M VHB材料介电弹性体薄膜的上下表面,形成25um厚柔性电极一和柔性电极二,并引出导线,用于连接电源;(1) Preparation of deformation structure: 1 mm thick 3M VHB material dielectric elastomer film was uniaxially pre-stretched by 2 times, and then the polyacrylamide hydrogel electrode prepared by mixing LiCl was adhered to the 3M VHB material dielectric elasticity On the upper and lower surfaces of the body film, a 25um thick flexible electrode 1 and a
(2)制备刚度调节结构:取同样面积的1mm厚的3M VHB材料介电弹性体薄膜单轴预拉伸2倍,切割去除与电极面积相近的部分,形成空腔,留待电流变液填充;(2) Preparation of stiffness adjustment structure: take the same area of 1mm thick 3M VHB material dielectric elastomer film uniaxially pre-stretched by 2 times, cut and remove the part similar to the electrode area, form a cavity, and leave it to be filled with electrorheological fluid;
(3)组装结构:将一片步骤2制作好的刚性调节结构覆盖在一片步骤1制作好的形变结构上,刚性调节结构下表面与该片形变结构的柔性电极一进行粘结;然后再将另一片步骤1制作好的形变结构覆盖在刚性调节结构上,刚性调节结构上表面与该片形变结构的柔性电极二进行粘结,从而使所述预留空腔被封闭形成密封空腔;然后在形变结构外表面覆盖一层聚二甲基硅氧烷溶液形成绝缘保护层;(3) Assembly structure: cover a piece of rigidity adjustment structure made in
(4)装填电流变液:利用注射器将CTO巨电流变液注入前述密封空腔中,使之充满。(4) Filling electrorheological fluid: inject CTO giant electrorheological fluid into the aforementioned sealed cavity with a syringe to make it full.
本实施例的人工肌肉的工作模式也可以是多种,例如:请再次参阅图5所示,可以将左侧导线131、左侧导线132及右侧导线132与电源连通,对左侧介电弹性体薄膜11和电流变液22施加电压,左侧介电弹性体薄膜11舒张,使人工肌肉向右侧弯曲;同时电流变液22粘度增加,人工肌肉刚度提升。人工肌肉的弯曲角度和刚度通过改变施加电压大小调节。电源输出电压3kV,CTO巨电流变液屈服应力增加到35kPa,人工肌肉向右侧弯曲17度,且其刚度提升,将输出电压提高到4kV,CTO巨电流变液屈服应力增加到63kPa,人工肌肉向右侧弯曲22度,且其刚度进一步提升。The working mode of the artificial muscle in this embodiment can also be various. For example, please refer to FIG. 5 again. Voltage is applied to the
实施例3:该实施例提供的一种人工肌肉具有图1-图3所示的结构,而其制作方法包括如下步骤:Embodiment 3: A kind of artificial muscle provided by this embodiment has the structure shown in Fig. 1-Fig. 3, and its manufacturing method comprises the following steps:
(1)制备形变结构:将1.5mm厚的3M VHB材料介电弹性体薄膜单轴预拉伸3倍,然后将混合LiCl制备而成的聚丙烯酰胺水凝胶电极黏附在3M VHB材料介电弹性体薄膜的上下表面,形成25um厚柔性电极一和柔性电极二,并引出导线,用于连接电源;(1) Preparation of deformation structure: 1.5mm thick 3M VHB material dielectric elastomer film was uniaxially pre-stretched by 3 times, and then the polyacrylamide hydrogel electrode prepared by mixing LiCl was adhered to the 3M VHB material dielectric The upper and lower surfaces of the elastomer film are formed with a 25um thick flexible electrode 1 and
(2)制备刚度调节结构:取同样面积的1.5mm厚的3M VHB材料介电弹性体薄膜单轴预拉伸3倍,切割去除与电极面积相近的部分,形成空腔,留待电流变液填充;(2) Preparation of stiffness adjustment structure: take the same area of 1.5mm thick 3M VHB material dielectric elastomer film uniaxially pre-stretch 3 times, cut and remove the part similar to the electrode area, form a cavity, and leave it to be filled with electrorheological fluid ;
(3)组装结构:将一片步骤2制作好的刚性调节结构覆盖在一片步骤1制作好的形变结构上,刚性调节结构下表面与该片形变结构的柔性电极一进行粘结;然后再将另一片步骤1制作好的形变结构覆盖在刚性调节结构上,刚性调节结构上表面与该片形变结构的柔性电极二进行粘结,从而使所述预留空腔被封闭形成密封空腔;然后还可以在形变结构外表面覆盖一层聚二甲基硅氧烷溶液形成绝缘保护层;(3) Assembly structure: cover a piece of rigidity adjustment structure made in
(4)装填电流变液:利用注射器将MMO巨电流变液注入前述密封空腔中,使之充满。(4) Filling the electrorheological fluid: inject the MMO giant electrorheological fluid into the aforementioned sealed cavity with a syringe to make it full.
本实施例的人工肌肉的工作模式也可以是多种,例如:请再次参阅图6所示,将左侧导线131、左侧导线132、右侧导线131及右侧导线132与电源连通,对左侧介电弹性体薄膜11和右侧介电弹性体薄膜11施加电压,左侧介电弹性体薄膜11和左侧介电弹性体薄膜11同时舒张,人工肌肉沿Y轴和Z轴伸长;同时电流变液22也被施加电压,电流变液22粘度增加,人工肌肉刚度提升。人工肌肉的伸长比例和刚度通过改变施加电压大小调节。电源输出电压4kV,MMO巨电流变液屈服应力增加到38kPa,人工肌肉刚度提升,将输出电压提高到7kV,MMO巨电流变液屈服应力增加到66kPa,人工肌肉刚度进一步提升。The working mode of the artificial muscle in this embodiment can also be various. For example, please refer to FIG. 6 again. Connect the
以上所述仅为本发明的公开披露,但本身却的保护范围并非仅限于此。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。The above is only a public disclosure of the present invention, but its protection scope is not limited to this. Various modifications and variations of the present invention are possible for those skilled in the art. Any modification, equivalent replacement, improvement, etc. made within the spirit and principle of the present invention shall be included within the protection scope of the present invention.
Claims (5)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911076288.XACN110757434B (en) | 2019-11-06 | 2019-11-06 | Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911076288.XACN110757434B (en) | 2019-11-06 | 2019-11-06 | Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110757434A CN110757434A (en) | 2020-02-07 |
| CN110757434Btrue CN110757434B (en) | 2022-06-24 |
Family
ID=69336075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911076288.XAActiveCN110757434B (en) | 2019-11-06 | 2019-11-06 | Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110757434B (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111390895A (en)* | 2020-04-22 | 2020-07-10 | 浙江大学 | Dielectric elastomer spring structure artificial muscle module and manufacturing method thereof |
| CN111965728A (en)* | 2020-08-20 | 2020-11-20 | 昆明理工大学 | Underwater self-powered detection equipment |
| CN113119088B (en)* | 2021-04-08 | 2021-10-01 | 关春东 | An electric artificial muscle with three-dimensionally stacked electrodes |
| CN113910212A (en)* | 2021-10-08 | 2022-01-11 | 北京化工大学 | Artificial muscle design and preparation method based on ultrasonic-assisted forced infiltration |
| CN114271958A (en)* | 2021-12-22 | 2022-04-05 | 大连医科大学 | Mouth cancer postoperative opening assistor |
| CN114750141B (en)* | 2022-04-29 | 2023-10-17 | 电子科技大学 | Dielectric elastomer artificial muscle based on laser carbonization and preparation method thereof |
| CN115960396B (en)* | 2022-12-01 | 2023-06-30 | 东北电力大学 | A preparation method and electric drive control method of a bionic artificial muscle cluster structure |
| CN116001936B (en)* | 2022-12-16 | 2024-11-26 | 广东省智能机器人研究院 | Soft actuator and crawling robot based on giant electrorheological fluid |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102215743A (en)* | 2008-09-19 | 2011-10-12 | 拜尔材料科学股份公司 | Electroactive Polymer Transducers |
| CN109572966A (en)* | 2018-11-26 | 2019-04-05 | 浙江大学 | A kind of software artificial-muscle driver |
| CN109571453A (en)* | 2018-12-18 | 2019-04-05 | 上海交通大学 | Variation rigidity dielectric elastomer driver based on magnetic rheology elastic body |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60037433T2 (en)* | 1999-07-20 | 2008-12-04 | Sri International, Menlo Park | Electroactive polymer generators |
| DE102009030693A1 (en)* | 2009-06-26 | 2010-12-30 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Electroactive elastomer actuator and process for its preparation |
- 2019
- 2019-11-06CNCN201911076288.XApatent/CN110757434B/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102215743A (en)* | 2008-09-19 | 2011-10-12 | 拜尔材料科学股份公司 | Electroactive Polymer Transducers |
| CN109572966A (en)* | 2018-11-26 | 2019-04-05 | 浙江大学 | A kind of software artificial-muscle driver |
| CN109571453A (en)* | 2018-12-18 | 2019-04-05 | 上海交通大学 | Variation rigidity dielectric elastomer driver based on magnetic rheology elastic body |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110757434A (en) | 2020-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110757434B (en) | Artificial muscle based on dielectric elastomer and adjustable stiffness intelligent fluid and its manufacturing method | |
| CN110172126B (en) | Artificial muscle driving module based on double-network hydrogel and dielectric elastomer and preparation method thereof | |
| CN109572966A (en) | A kind of software artificial-muscle driver | |
| CN111152210B (en) | A Flexible Electrohydrodynamic Actuator | |
| CN104309714B (en) | The flexible intelligent machine of creeping | |
| CN100581039C (en) | Pneumatic Dielectric Elastomer Hemispherical Actuator | |
| US11108343B2 (en) | Flexible and soft smart driving device | |
| CN102551918A (en) | Electroshock extension artificial muscle movement device | |
| WO2007023625A1 (en) | Polymer actuator | |
| CN103192383B (en) | The robot arm device of a kind of artificial-muscle and driving thereof | |
| CN101252328B (en) | Dielectric elastomer folding-shaped driver making method | |
| CN106985988A (en) | A kind of modular event driven device based on dielectric elastomer | |
| CN110474565A (en) | A kind of automatically controlled bend in one direction type deformation-variation rigidity integrated driver | |
| JP5464808B2 (en) | Dielectric material and actuator using the same | |
| CN105099262B (en) | A kind of inflatable deformable body based on dielectric elastomer | |
| CN117754638A (en) | Self-sensing pneumatic torsion driver based on electromagnetic induction principle | |
| KR100678987B1 (en) | Biomimetic Paper Actuator, Operation Method of Biomimetic Paper and Manufacturing Method of Biomimetic Paper | |
| CN108281542B (en) | Bionic manual driving device | |
| CN113247136B (en) | A biomimetic adhesive component driven by solid-liquid hybrid drive with controllable adhesion-desorption | |
| CN111262474B (en) | Driving force calculation method of plane hydraulic amplification self-healing electrostatic actuator | |
| JP2006311630A (en) | Actuator module | |
| CN105515441A (en) | Vibration active control platform based on piezoelectric crude fiber composite material and method thereof | |
| CN115570593B (en) | Multi-degree-of-freedom magnetic control spiral bionic flexible joint and application | |
| CN114928267B (en) | Multifunctional soft driver driven by dielectric elastomer | |
| CN204124227U (en) | Flexible intelligent is creeped machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |